DEM生成步骤
insar 技术生产 dem的原理和数据处理步骤
insar 技术生产 dem的原理和数据处理步骤一、引言合成孔径雷达(InSAR)技术是一种广泛应用于地球遥感领域的高分辨率成像雷达。
通过这种技术,我们可以获取地面高精度的几何形态和高度信息,进而生成数字高程模型(DEM),为地理、地质、环境等领域提供了重要的数据支持。
本篇文章将详细介绍insar技术生产DEM的原理和数据处理步骤。
二、insar技术生产DEM的原理insar技术通过重复的卫星扫描,获取地面的反射信号,经过信号处理和分析,可以重建地面的三维结构。
这种技术具有高分辨率、全天时、全天候工作、无损测量等优点。
在雷达信号处理中,我们可以通过对信号的干涉处理,得到同一地物的多幅图像的相位信息,进而利用相位信息反演地物的形状,得到DEM。
具体来说,我们可以通过对同一地物在不同时间获得的雷达图像进行干涉处理,得到地物表面的高度信息,再结合地物的反射率信息,通过一系列算法,可以精确计算出地物表面的三维形态。
三、数据处理步骤1. 数据获取:获取经过处理并配准好的SAR数据,确保数据的准确性和完整性。
2. 预处理:对获取的数据进行预处理,包括去除噪声、滤波、几何校准等,以提高数据的可用性。
3. 差分干涉处理:对预处理过的数据进行差分干涉处理,得到干涉图,通过解干涉图获得相位信息。
4. 相位解包裹:利用获得的相位信息进行相位解包裹,得到地面点的幅度和相位信息。
5. 高度计算:根据反射率或其他参数,结合幅度和相位信息,通过算法反演地物的高度信息。
6. 精度评估与后处理:对反演得到的高度信息进行精度评估,并进行后处理,如平滑、插值等,得到最终的DEM结果。
7. DEM成果输出:将DEM成果进行格式转换,并输出。
四、结论insar技术通过精确的干涉测量和先进的算法,可以有效地生产DEM,为地理、地质、环境等领域提供了重要的数据支持。
然而,由于雷达信号的复杂性以及地球曲率等因素的影响,DEM的生产过程中需要精细的处理和校准,以确保结果的准确性。
数字高程模型dem的制作流程
数字高程模型dem的制作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!数字高程模型(Digital Elevation Model,简称 DEM)是一种表示地形表面高程的数字模型。
tin生成dem的原理
tin生成dem的原理DEM(Digital Elevation Model)是数字高程模型的缩写,是一种用来描述地球表面高程信息的数学模型。
而TIN(Triangulated Irregular Network)则是一种常用的DEM生成方法之一。
本文将介绍以TIN生成DEM的原理。
TIN生成DEM的过程主要分为三步:数据采集、三角网剖分和高程插值。
第一步,数据采集。
在生成DEM之前,需要先收集地面高程数据。
常用的数据采集方法有激光雷达、航空摄影、卫星测绘等。
这些技术可以获取大量的高程点数据,以及与之相关的属性信息。
第二步,三角网剖分。
三角网剖分是将采集到的高程点数据进行三角形网格的划分。
划分后的三角形网格能够准确地描述地形的细节,同时保证相邻三角形之间的连续性。
常用的三角网剖分算法有Delaunay三角剖分算法、TIN插值算法等。
第三步,高程插值。
在三角网剖分完成后,需要对三角形网格中的每个顶点进行高程值的插值处理,以得到整个地表的高程模型。
常用的插值方法有线性插值、反距离权重插值、克里金插值等。
插值的结果即为TIN生成的DEM。
TIN生成DEM的原理基于以下假设:地表的高程变化是连续的,相邻点之间的高程变化是平滑的。
通过三角网剖分和高程插值,可以在三角形网格中准确地描述出地形的细节,并确保相邻区域的高程变化平滑过渡。
TIN生成DEM的优点在于能够准确地描述地形细节,适用于复杂地形的表达。
同时,TIN模型还具有较小的数据存储量,能够高效地进行数据处理和分析。
然而,TIN生成DEM也存在一些限制。
首先,TIN模型的生成需要大量的高程点数据,数据的采集和处理成本较高。
其次,TIN模型在描述平坦区域时可能会引入冗余信息,导致数据冗余和存储浪费。
另外,TIN模型对于大范围的地形表达可能不够准确,需要进行后期的数据处理和修正。
以TIN生成DEM的原理是通过数据采集、三角网剖分和高程插值三个步骤来构建地表高程模型。
dem生产的基本作业过程
DEM(离散元法)是一种用于模拟颗粒体系行为的数值方法,常用于研究颗粒流、颗粒分离、碰撞等过程。
DEM生产的基本作业过程包括以下几个步骤:
1. 预处理:在进行DEM模拟之前,需要进行预处理工作。
包括准备输入数据,如颗粒的物理属性、初始位置和速度等;建立颗粒体系的几何模型;确定边界条件和约束条件等。
2. 碰撞检测和力计算:DEM模拟中最核心的步骤是碰撞检测和力计算。
通过判断颗粒之间是否发生碰撞,并计算碰撞产生的力和力矩。
常用的方法包括排斥-恢复模型、黏弹性模型等。
3. 运动方程求解:根据颗粒受到的力和力矩,采用数值求解方法求解颗粒的运动方程。
常用的方法包括欧拉法、隐式法、Verlet法等。
4. 时间积分:通过数值积分方法将颗粒的位置和速度更新到下一个时间步。
常用的方法包括显式欧拉法、隐式欧拉法、Leapfrog法等。
5. 碰撞处理:在颗粒之间发生碰撞时,需要进行碰撞处理。
包括计算碰撞后的速度和角速度、更新碰撞后的位置等。
6. 后处理:在模拟结束后,进行后处理分析。
可以计算颗粒的能量、
压力、位移等物理量,以及绘制颗粒的运动轨迹、形态变化等。
DEM生产的基本作业过程是一个迭代循环的过程,通过不断更新颗粒的位置和速度,模拟颗粒体系的运动行为。
在实际应用中,还可以根据需求进行参数调优、模型验证等工作,以提高模拟结果的准确性和可靠性。
dem建立的一般步骤
dem建立的一般步骤:
dem(数字高程模型)的建立一般遵循以下步骤:
1.定向建模型:在MapMatrix系统下导入空三成果文件。
为了保证数据的准确性,整
个测区的空三成果需导入外业控制点进行定向评估,如不能满足规范限差要求,需要重新定向,直到满足精度要求为止。
再进行绝对定向,核线重采样,建立立体模型。
2.生成单模型DEM:设置好相关参数,软件自动生成DEM。
3.DEM拼接:将图幅所需的单模型DEM拼接在一起,根据比例尺设置标准分幅或者
任意分幅利用系统的DEMX模块裁切单幅DEM。
4.DEM编辑:DEM生成后,将数字高程模型格网点或自动匹配结果映射到影像立体模
型上进行编辑,使数字格网点或匹配点、线尽量切准地面。
预处理结束后进行影像匹配以及对匹配结果进行编辑。
编辑完后可作为成果输出。
测绘技术如何进行DEM生成与分析
测绘技术如何进行DEM生成与分析测绘技术在地理信息系统(GIS)和遥感领域中起着重要的作用。
其中,数字高程模型(Digital Elevation Model,简称DEM)的生成和分析是测绘技术应用的重要方面之一。
本文将介绍DEM的生成和分析的基本原理和方法。
一、DEM生成DEM是地球表面高程信息的数字化表示,可以呈现出地面的起伏和形状。
常见的DEM生成方法有光学影像法、激光雷达法和雷达干涉法等。
1. 光学影像法光学影像法是利用航空或卫星遥感影像来生成DEM的一种方法。
通过对图像进行几何矫正和配准,可以获取地面上的特征点的坐标,并计算出其高程信息。
这种方法常用于大面积的地形测量和地貌分析。
2. 激光雷达法激光雷达法是利用激光器向地面发射激光束,通过测量激光束的反射时间和回波强度来计算地面点的坐标和高程信息。
这种方法具有高精度和高分辨率的优势,常用于山地地形的测量和建模。
3. 雷达干涉法雷达干涉法是利用合成孔径雷达(SAR)的干涉图像来生成DEM的一种方法。
通过对两幅或多幅干涉图像进行差分操作,可以获取地表的高程变化信息。
这种方法适用于大范围的地表变形监测和地震研究。
二、DEM分析DEM生成后,可以进行各种地形参数的分析和应用。
下面介绍几种常见的DEM分析方法。
1. 地形剖面分析地形剖面分析是对DEM数据进行剖面提取,以了解地面的起伏变化情况。
通过剖面分析,可以获取地面的高程变化曲线,并进一步计算地形参数,如坡度、坡向、高程差等。
这些参数对地质研究、水文模拟和土地规划等领域具有重要意义。
2. 流域提取和水流模拟利用DEM数据可以提取出流域范围,并计算出流域的面积、长度和周长等属性。
同时,基于DEM数据,还可以进行水流模拟和洪水预测。
通过建立流域模型,模拟水流在地表的流动过程,从而预测洪水灾害的发生和影响。
3. 三维可视化和地形重建利用DEM数据可以进行三维地形模型的可视化和地形重建。
通过DEM数据,可以构建真实的地形模型,使人们能够直观地了解地貌特征和地形变化。
利用三线阵影像生成dem步骤
利用三线阵影像生成dem步骤
生成DEM(Digital Elevation Model)的步骤如下:
1. 数据收集:首先需要收集三线阵(Triangulation Measure)影像数据。
三线阵影像是利用航空摄影测量方法获取的,具有高分辨率和高精度的特点。
2. 数据预处理:对收集到的三线阵影像进行预处理,包括去除噪声、修复图像、去除图像畸变等。
这一步骤主要是为了提高影像的质量和准确性。
3. 特征提取:利用图像处理技术,提取出三线阵影像中的特征点。
特征点可以是建筑物的角点、道路的交叉口等。
通过提取特征点,可以更好地描述地表特征,为后续的处理提供基础。
4. 立体匹配:在提取到特征点的基础上,进行立体匹配。
立体匹配是指通过对比左右航片的特征点,确定它们在地面上的位置。
常用的立体匹配方法有基于相似性、基于几何约束等。
5. 生成三维点云:将匹配得到的特征点转换为三维坐标,生成三维点云。
三维点云是描述地表形状的点集,其中每个点的坐标表示地面高度。
6. 数据过滤和平滑:对三维点云进行滤波和平滑操作,去除离群点和噪声,使得生成的DEM更符合实际地形。
7. 生成DEM:根据过滤和平滑后的三维点云,生成DEM。
DEM是一种用栅格形式表示地表高程的数据模型,其中每个
栅格单元格的值代表对应地面的高程。
8. DEM后处理:对生成的DEM进行后处理,包括裁剪、修正、融合等操作。
这一步骤主要是为了进一步提高DEM的精
度和质量。
通过以上步骤,可以利用三线阵影像生成高精度的DEM数据,为地形分析、地貌变化监测等应用提供基础数据。
dem的生成与应用原理
DEM的生成与应用原理1. DEM的概述DEM(Digital Elevation Model,数字高程模型)是由地面数字图像计算出的地理高程数据。
它通过数学模型和计算机算法将地面表面上的高程信息以数字化的形式表示出来。
DEM非常重要,它可以应用在地形分析、流域模拟、地质勘探等领域。
2. DEM的生成方法以下是一些常见的DEM生成方法:2.1 光学遥感技术光学遥感技术利用卫星或航空器上的传感器获取地面的图像数据,然后通过数字影像处理算法提取出地表的高程信息。
2.2 激光雷达遥感技术激光雷达遥感技术是一种利用激光束测量地面高程的技术。
激光雷达器发射激光束,然后接收反射回来的激光束,通过计算激光束的飞行时间来推算地面的高程。
2.3 雷达遥感技术雷达遥感技术通过发射微波信号,接收回波,并通过信号处理来得到地面的高程信息。
2.4 GPS测量技术GPS测量技术利用全球定位系统(GPS)接收卫星信号并计算接收机位置,通过多个接收机之间的位置差异来推算地面高程。
3. DEM的应用DEM在地理信息系统(GIS)和地形分析中有广泛的应用。
以下是DEM的一些主要应用:3.1 地形分析DEM可以用来进行地形分析,包括地形剖面、坡度分析、坡向分析等。
这些分析可以帮助我们了解地面的地形特征,例如山脉、河流、凹陷区等。
3.2 流域模拟DEM可以用于模拟流域的水文过程,例如降雨径流模拟、洪水模拟等。
通过将DEM与气象数据和水文模型结合,可以分析流域的水文特征,预测洪水的产生和演变。
3.3 地质勘探DEM可以用于地质勘探,帮助判断地形特征与地质结构的关系。
通过分析DEM数据,可以找到可能的矿产资源区域、断层区域等。
3.4 地图制作DEM在地图制作中也起到了重要的作用。
由于DEM提供了地面高程信息,可以用来生成等高线图、三维地形模型等。
3.5 地貌研究DEM可以帮助地貌学家研究各种地貌现象,例如:山地地貌、河流地貌、冰川地貌等。
DEM数据生产流程图
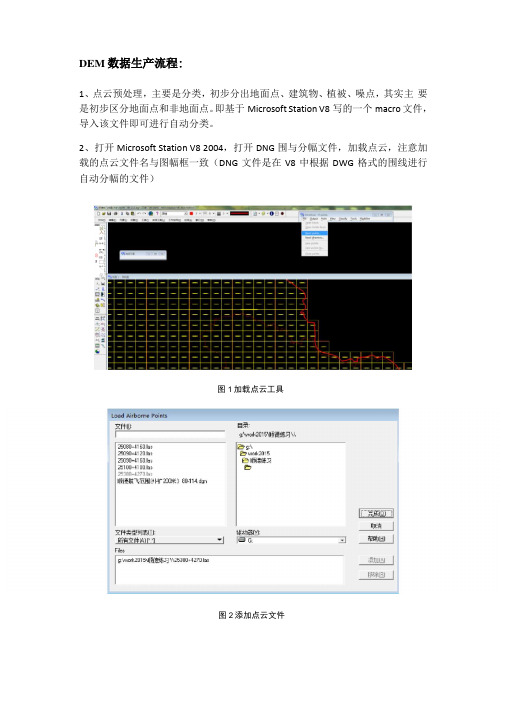
DEM数据生产流程:1、点云预处理,主要是分类,初步分出地面点、建筑物、植被、噪点,其实主要是初步区分地面点和非地面点。
即基于Microsoft Station V8写的一个macro 文件,导入该文件即可进行自动分类。
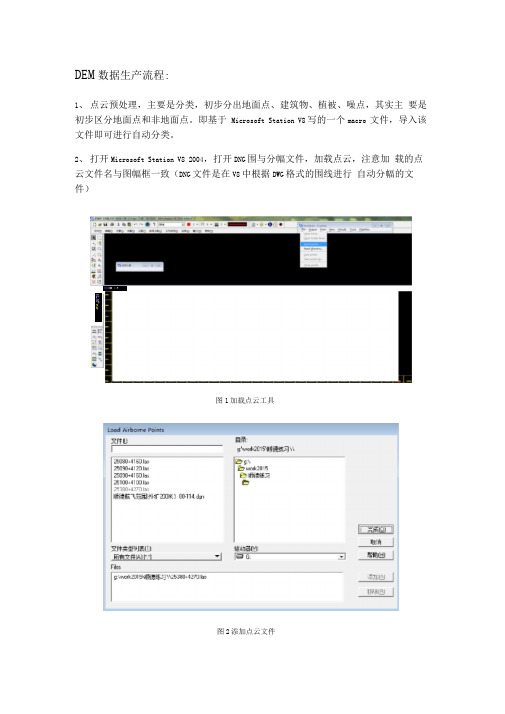
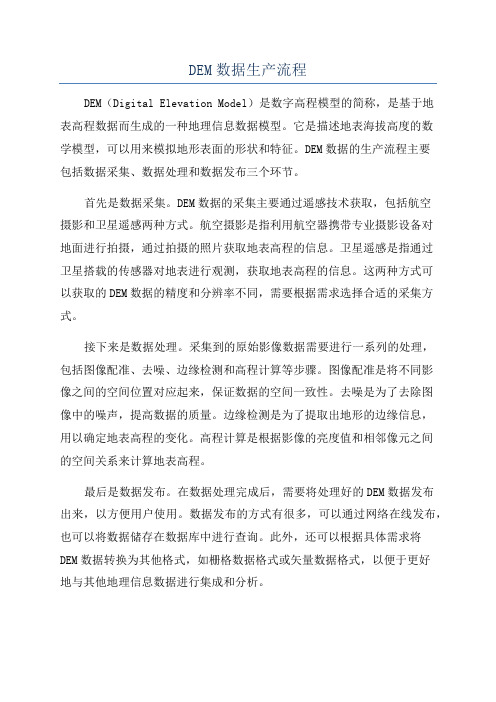
2、打开Microsoft Station V8 2004,打开DNG围与分幅文件,加载点云,注意加载的点云文件名与图幅框一致(DNG文件是在V8中根据DWG格式的围线进行自动分幅的文件)悟*■丨FMLMFnr图1加载点云工具图2添加点云文件3、根据围线裁剪点云,首先选中围线,点击“ poi nt>delete>outside fence ”然后点击围线部,从而裁掉围外的点云4、选出噪点,打开两个视图,一个为俯视图,一个为侧视图, F5键剖切查看,在俯视图中拉框选择剖切的位置,侧视图中显示目标围的点云侧视图(如图), 在侧视图中发现异常点时,使用 F3键线上分类,源图层设置为任何点,目标图 层设置为噪点图层,即将噪点选出来图3加载点云设置角 2538014270.- 5 牡石 pointsFile Output | Point View Clarify Tools FlightlineEditselected ■“Select by classFind■网Bj _point chss... 0y flightlinsi.b[mide fence图4裁围5、删除噪点,使用“ point>delete>By point class',选择噪点图层删除图7删除噪点图层&构建全部点的TIN,辅助进行精细分类,即精细区分出地面点和非地面点首先F9键生成TIN模型,选择所有的图层建全模,然后F8键进行渲染,- 择颜色色带数值为10,颜色可自定义设置,从而生成全部点模型般选图5俯视图与侧视图图6噪点选择Delete points by Ha阵Create editable model7、构建地面点的TIN 模型,F9键构建模型,仅选ground 层,全模切换地面模型 可以点击“ cance ”然后F7刷新模型(或者删掉原有模型,仅选 ground 层)点 “ ok ”重新建模然后渲染查看1 DeFaull2 Ground3 L M vegetation4hi edinjm v 巳g 已talior吁High vegetation6 E Glding7 L MA 1paintTFSurface settingsSurface infoimationType: Gucunci ▼[Staragefile : I 顺德航飞范圉也卜扩2D 咪)CancelCancelModel classesS cale elevations 厂[nside fence only图8构建TIN图9 TIN 模型图10地面TIN模型8、对比全模和地面模型,发现地面模型出现全模中非地面点的模型,即需剖切查看从部分点云的分类,如图为一个高架的点云错分为地面的点了图11精细点云分类9、 全图检查,主要检查是否有漏洞或者残余的噪点 10、 保存点云11、创建DEM 使用“ output>create surface model ”,根据比例尺要求设置格网间 距,保存DEM 成果。
DEM数据生产流程
DEM数据生产流程DEM(Digital Elevation Model)是数字高程模型的简称,是基于地表高程数据而生成的一种地理信息数据模型。
它是描述地表海拔高度的数学模型,可以用来模拟地形表面的形状和特征。
DEM数据的生产流程主要包括数据采集、数据处理和数据发布三个环节。
首先是数据采集。
DEM数据的采集主要通过遥感技术获取,包括航空摄影和卫星遥感两种方式。
航空摄影是指利用航空器携带专业摄影设备对地面进行拍摄,通过拍摄的照片获取地表高程的信息。
卫星遥感是指通过卫星搭载的传感器对地表进行观测,获取地表高程的信息。
这两种方式可以获取的DEM数据的精度和分辨率不同,需要根据需求选择合适的采集方式。
接下来是数据处理。
采集到的原始影像数据需要进行一系列的处理,包括图像配准、去噪、边缘检测和高程计算等步骤。
图像配准是将不同影像之间的空间位置对应起来,保证数据的空间一致性。
去噪是为了去除图像中的噪声,提高数据的质量。
边缘检测是为了提取出地形的边缘信息,用以确定地表高程的变化。
高程计算是根据影像的亮度值和相邻像元之间的空间关系来计算地表高程。
最后是数据发布。
在数据处理完成后,需要将处理好的DEM数据发布出来,以方便用户使用。
数据发布的方式有很多,可以通过网络在线发布,也可以将数据储存在数据库中进行查询。
此外,还可以根据具体需求将DEM数据转换为其他格式,如栅格数据格式或矢量数据格式,以便于更好地与其他地理信息数据进行集成和分析。
总的来说,DEM数据的生产流程包括数据采集、数据处理和数据发布三个环节。
其中,数据采集是通过航空摄影和卫星遥感技术获取原始影像数据;数据处理是对原始影像数据进行图像配准、去噪、边缘检测和高程计算等步骤;数据发布是将处理好的DEM数据以用户能够方便使用的方式进行发布。
通过这个流程,可以得到高精度、高分辨率的DEM数据,用以模拟地表的形状和特征,为地理信息系统的应用提供支持。
DEMDOMDLG生产流程
摄影负片
象片扫描 GPS外业控制 象片参数
GPS自动空中三角测量
单个象对定向或安置 (内定向,相对定向,绝对定向)
自动相关 获取DEM
检查 编辑 修改
多模型DEM镶嵌
质量检测与元数据文件记录 DEM建库或刻盘
b.从现有地形图获取数据的流程
如果采用原有的地图,或使用未经改造的模 拟精密立体测图仪获得的等高线,可以扫描, 先进行矢量化,得到矢量化的等高线,再内 插成DEM。该种方法由于使用的设备相对 简单,所获得的DEM精度,与前面所述的 解析测图仪方法相当,可以得到比较好的精 度,它不失为目前DEM生产的重要方法之 一。该种方法的生产工艺如下所示:
格网DEM的缺点
1)在地形平坦的地方,存在大量的数据 冗余; 2)在不改变格网大小的情况下,难以表 达复杂地形的突变现象;
2.等值线模型
3.不规则三角网DEM
不规则三角网(TIN)
1 2 3 4 5 6 7 8 X X X X X X X X Y Y Y Y Y Y Y Y Z Z
3 1 2 顶点 邻接三角形
1
4
1 1 1 2 5 4 4 3
5 4 2 3 6 5 7 4
6 5 4 4 8 8 8 7
2 1
5 3
X 6 2
Z Z Z Z Z Z
6 5 1
2 5 4 8 7
2
3
3 4
X 4 3 1 2 6 4
X 8 X 6 5 8 7 7 X X
6
5 6 7
8
7
8
点文件
三角网的一种存储方式
三角形文件
第二种是点栅格观点:认为该网格单元 的数值是网格中心点的高程或该网格单 元的平均高程值,这样就需要用一种插 值方法来计算每个点的高程。
利用cad等高线生成dem的步骤
利用cad等高线生成dem的步骤标题,利用CAD生成DEM的步骤。
数字高程模型(DEM)是地理信息系统(GIS)中常用的数据类型,用于表示地表的高程信息。
利用CAD软件可以生成DEM,以下
是利用CAD生成DEM的步骤:
1. 收集高程数据,首先需要收集地表的高程数据,这可以通过
现场测量、卫星遥感数据或其他地理信息数据源获得。
2. 准备CAD软件,选择一款支持地形建模的CAD软件,例如AutoCAD、MicroStation等,并确保安装了相应的插件或扩展程序,以便进行DEM的生成和编辑。
3. 导入高程数据,将收集到的高程数据导入CAD软件中,通常
高程数据以点或者等高线的形式存在。
4. 创建TIN(三角网),在CAD软件中,利用导入的高程数据
创建TIN,即由三角形构成的地形模型。
这可以通过CAD软件中的
地形建模工具来实现。
5. 生成DEM,利用CAD软件的功能,将创建的TIN转换为DEM。
这个步骤通常需要使用CAD软件中的地形分析工具或者DEM生成工
具来完成。
6. 编辑和优化,生成DEM后,可能需要对其进行编辑和优化,
以确保地形模型的准确性和完整性。
这包括去除不必要的数据、填
补空缺区域等操作。
7. 导出DEM数据,最后,将编辑好的DEM数据导出为常见的文
件格式,如TIFF、ASCII等,以便在GIS软件中进行进一步的分析
和应用。
通过以上步骤,利用CAD软件可以生成高质量的数字高程模型,为地理信息系统和地形分析提供了重要的数据支持。
dem高程数据生产方案
dem高程数据生产方案
DEM(数字高程模型)高程数据的生产方案通常包括以下几个步骤:
1. 数据收集:收集需要制作DEM的地表数据,包括地形图、遥感影像、GPS数据等。
2. 数据预处理:对收集的数据进行预处理,包括数据格式转换、坐标系统一、数据拼接等。
3. 建立高程模型:利用数学算法和计算机技术,将预处理后的数据转换为高程模型。
这一步通常需要使用GIS软件或其他相关软件。
4. 精度评估:对生成的高程模型进行精度评估,确保其精度符合要求。
如果精度不满足要求,需要进行数据修正或重新采集数据。
5. 数据发布:将生成的高程模型发布到相关平台或数据库,供用户下载和使用。
在具体操作中,根据不同的应用场景和数据类型,可能还需要进行其他处理和操作。
同时,为了确保高程数据的准确性和可靠性,还需要注意以下几点:
1. 数据来源的可靠性:选择可靠的数据来源,避免使用不准确或过时的数据。
2. 数据处理的规范性:在数据预处理和模型建立过程中,要遵循统一的规范和标准,以确保数据的可比性和可操作性。
3. 精度评估的客观性:在进行精度评估时,要采用客观的评估指标和方法,避免主观因素对精度的影响。
4. 数据发布的及时性:要及时更新和发布高程数据,保证数据的时效性和可用性。
DEM数据生产流程图
DEM 数据生产流程:1、点云预处理,主要是分类,初步分出地面点、建筑物、植被、噪点,其实主 要是初步区分地面点和非地面点。
即基于Microsoft Station V8写的一个macro 文件,导入该文件即可进行自动分类。
2、打开Microsoft Station V8 2004,打开DNG 围与分幅文件,加载点云,注意加 载的点云文件名与图幅框一致(DNG 文件是在V8中根据DWG 格式的围线进行 自动分幅的文件)城入'm I[£=□1/晶出厂・泉m 图1加载点云工具图2添加点云文件Load Poinls“ Iritm 的⑷on 乒 Lha V Seama 1 - Echo 府阿oh r Cokf 「 Noim-aJ uechxr 口囱而修 r Echolangih r PaiarTiel.B - 「 Etlo nonriailpr 囱口单L Edcifo 抽on * Time L Image-rii-inibei 歹 Chsi Al DllLre nunbeiT. U se licm hb ^tarref ntnihefi - LI SE lic<n lileCarc^图3加载点云设置3、根据围线裁剪点云,首先选中围线,点击“point>delete>outside fence ”然后 点击围线部,从而裁掉围外的点云图4裁围4、选出噪点,打开两个视图,一个为俯视图,一个为侧视图,F5键剖切查看, 在俯视图中拉框选择剖切的位置,侧视图中显示目标围的点云侧视图(如图), 在侧视图中发现异常点时,使用F3键线上分类,源图层设置为任何点,目标图 层设置为噪点图层,即将噪点选出来Fienamf 25260*4270 lai -Banis 5 反E 蚀grip evsy [WCF thporJ口通明 M2 • G"UJ M Inside lerct crip 修 253&0 + 4270. os - 5 733 246 pointeFilr OuHpLil | Point View Cljjsify 丁口ok Fl ightlin&Inside fenceUsing c&nt&rlinB.…..Edit selected.rrSelect by classUndoFrom lister£&let±&d painEEBy point class...By flightline...Outside fence图5俯视图与侧视图图6噪点选择5、删除噪点,使用“point>delete>By point class ”,选择噪点图层删除Using ccnterlincrr, 图7删除噪点图层6、构建全部点的TIN ,辅助进行精细分类,即精细区分出地面点和非地面点。
无人机航空测绘及后期制作课件:DEM生成

可以缩放DEM
DEM生成
DEM查看
用鼠标选中作业区中的DEM图像,按住鼠右移动。如果同时
按住CTRL键,则前后移动DEM
谢谢!
无人机飞控系统
DEM生成
DEM查看
单击DEM查看界面上的“视图”菜单,可对弹出的
菜单项进行查看设置
DEM生成
DEM查看
①旋转DEM
用鼠标选中作业区中的DEM图像,然后按住鼠标左键
上下左右移动,可以实现DEM的前后上下左右方向的
旋转
DEM生成
DEM查看
②缩放DEM
用鼠标选中作业区中的DEM图像,滚动鼠标中键,
单击 加入转化成DXF格式的特征线文件,点击
图标,即可生成相应的DEM
DEM生成
自动生成
①在工程浏览窗口中选中一个立体像对
②单击工程浏览窗口上的生成DEM的图标 ,或在
右键菜单中单击“新建DEM”选项
③单击 图标,系统自动完成DEM生成。并将处理
过程和结果显示在主界面中下部的“输出窗口”中
④单击 图标,即可显示自动生成的DEM
选择文件菜单下的“打开DLG数据文件”命令
点击工具栏的打开按钮,打开一个*.gdb数据库
• 新建DLG文件
选择文件菜单下的“新建DLG数据文件”命令,系统
弹出一个对话框。在该对话框的文件名文本框中输入
文件名,点击“保存”按钮
特征线采集
FeatureOne采集步骤
②设置工作区属性
重新设置具体操作如下:选择“工作区”菜单下的“工作
区属性”命令,选择子菜单中的“手工设置边界”命令
特征线采集
FeatureOne采集步骤
完成以上操作,便可打开或新建一个工作区开始具体的
生成dem
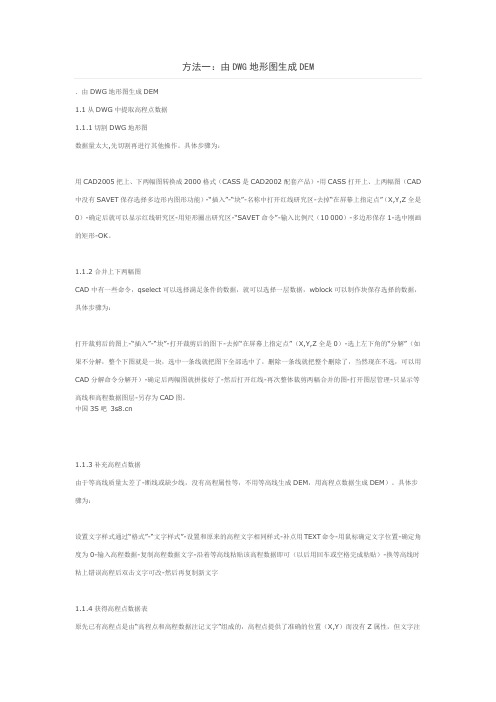
方法一:由DWG地形图生成DEM.由DWG地形图生成DEM1.1从DWG中提取高程点数据1.1.1切割DWG地形图数据量太大,先切割再进行其他操作。
具体步骤为:用CAD2005把上、下两幅图转换成2000格式(CASS是CAD2002配套产品)-用CASS打开上、上两幅图(CAD 中没有SAVET保存选择多边形内图形功能)-“插入”-“块”-名称中打开红线研究区-去掉“在屏幕上指定点”(X,Y,Z全是0)-确定后就可以显示红线研究区-用矩形圈出研究区-“SAVET命令”-输入比例尺(10 000)-多边形保存1-选中刚画的矩形-OK。
1.1.2合并上下两幅图CAD中有一些命令,qselect可以选择满足条件的数据,就可以选择一层数据,wblock可以制作块保存选择的数据,具体步骤为:打开裁剪后的图上-“插入”-“块”-打开裁剪后的图下-去掉“在屏幕上指定点”(X,Y,Z全是0)-选上左下角的“分解”(如果不分解,整个下图就是一块,选中一条线就把图下全部选中了,删除一条线就把整个删除了,当然现在不选,可以用CAD分解命令分解开)-确定后两幅图就拼接好了-然后打开红线-再次整体裁剪两幅合并的图-打开图层管理-只显示等高线和高程数据图层-另存为CAD图。
中国3S吧1.1.3补充高程点数据由于等高线质量太差了-断线或缺少线,没有高程属性等,不用等高线生成DEM,用高程点数据生成DEM)。
具体步骤为:设置文字样式通过“格式”-“文字样式”-设置和原来的高程文字相同样式-补点用TEXT命令-用鼠标确定文字位置-确定角度为0-输入高程数据-复制高程数据文字-沿着等高线粘贴该高程数据即可(以后用回车或空格完成粘贴)-换等高线时粘上错误高程后双击文字可改-然后再复制新文字1.1.4获得高程点数据表原先已有高程点是由“高程点和高程数据注记文字”组成的,高程点提供了准确的位置(X,Y)而没有Z属性,但文字注记提供了高程值而位置是不准的,有一个解决办法可以得到准确位置的准确高程值,先得到所有点的位置数据表(包含X,Y),再得到高程数据表(包含X,Y,H),再编程实现点和高程值的匹配,具体实现方法为:点的位置数据和高程数据分别保存在两个数组中,从第一个点开始在高程数据中找距离与他小于一个定值的高程文字,这个文字的内容就是这个点的高程,找到后马上去掉这个高程文字数据,减小以后的寻找负担(在VC中可以用CUintArray作为数据数组,有删除函数,采用GetSize()得到要寻找的数据个数;当然还有一种方法是,现在已经有EXCEL数据,转换成ACESS 数据库,然后在VC中读取数据库,一个在VC中好实现读取ACESS数据库,再一个是不是速度比VC中读取EXCEL 文件快呢?具体实现时在点数据表中新那一个字段,保存高程,在另一个高程表中读取XY值比较距离,打到高程就把高程数值更新到点数据表中的新字段中,当然找到一个就把高程表那一条记录删除,当然找到一条记录最好是再接着找,要是找到两个就说明那附近有问题,一个点和两个高程数据接近,或者说没有找到任何一个点,是不是距离设置太小了。
0.5米数字高程模型建设流程
0.5米数字高程模型建设流程
0.5米数字高程模型(DEM)是具有0.5米分辨率的数字地形模型。
它可以用于各种应用,例如地图制作、自然资源管理、工程设计和灾害评估。
0.5米DEM的建设流程通常包括以下步骤:
●数据收集:数据收集是DEM建设的第一步。
数据可以通过各种方法收集,
包括:
1.航空摄影测量:使用飞机或无人机拍摄的照片可以用于生成DEM。
2.激光雷达:激光雷达可以生成高精度的DEM。
3.光学测量:光学测量可以用于生成DEM,但精度较低。
●数据处理:数据处理是将原始数据转换为DEM的过程。
数据处理通常包括
以下步骤:
1.图像匹配:将图像或激光雷达点云匹配到同一坐标系。
2.地面点提取:从图像或激光雷达点云中提取地面点。
3.地形模型生成:使用地面点生成DEM。
●数据质量控制:数据质量控制是确保DEM质量的过程。
数据质量控制通常
包括以下步骤:
1.地面点密度检查:检查地面点密度是否满足要求。
2.地形模型平滑:消除DEM中的噪声。
3.地形模型精度检查:使用参考数据检查DEM的精度。
●数据发布:数据发布是将DEM发布到用户的过程。
数据发布通常包括以下
步骤:
1.数据格式转换:将DEM转换为用户可以使用的格式。
2.数据存储:将DEM存储在数据库或其他存储系统中。
3.数据目录:创建数据目录,以便用户可以轻松找到DEM。
如何处理地形图数据以生成数字高程模型
如何处理地形图数据以生成数字高程模型生成数字高程模型(Digital Elevation Model,简称DEM)是地图制作和地理信息处理的重要工作。
DEM作为一种描述地面高程分布的数据模型,广泛应用于土地规划、环境分析、气象预测等领域。
本文将介绍如何处理地形图数据以生成DEM,包括数据获取、处理方法和应用。
一、数据获取生成DEM所需的地形图数据可以通过多种途径获取。
其中,地理信息系统(GIS)是常用的数据来源。
通过GIS软件,可以获取地面要素数据、地形图和卫星遥感图像等。
此外,卫星激光测高(Lidar)和航空摄影测量也是获得高精度地表数据的重要手段。
二、数据预处理取得地形图数据后,需要进行预处理以满足DEM生成的要求。
首先,需对数据进行去噪处理,去除不符合地形特征的异常值或干扰信号。
其次,进行数据格式转换,将地形图数据转化为标准的栅格数据格式,如TIFF、ASCII等。
此外,对数据进行坐标系统转换和投影转换,以适配不同的使用环境。
三、数据插值数据插值是生成DEM的关键步骤之一。
在实际应用中,地形图数据的采样精度通常有限,需要通过插值算法填充缺失的高程数据。
最常见的插值方法包括反距离加权法、克吕金插值法和三次样条插值法等。
不同插值方法适用于不同类型的地形数据,选择合适的插值方法可以提高DEM的精度和真实性。
四、数据平滑生成的DEM数据通常会存在噪声和异常值,需要进行平滑处理。
平滑处理可以通过使用滤波器或进行数据平均等方法实现。
其中,滤波器可以根据滤波窗口的大小和形状对周围数据进行加权平均,以减少数据的波动和噪声。
数据平均则是通过将邻近的像素值进行平均,实现对DEM数据的平滑处理。
五、DEM的应用生成的DEM数据可以广泛应用于地理信息系统、地质勘探、环境科学等领域。
在地理信息系统中,DEM可以作为地图制作和测量分析的基础数据,用于土地规划、地形分析和水文模拟等。
在地质勘探中,DEM可以用于地质构造分析和地震预测等。
dem的概念
dem的概念引言随着科技的不断发展,数字地球模型(Digital Earth Model,DEM)逐渐成为地理信息系统(Geographic Information Systems,GIS)和遥感技术的热门研究领域。
DEM是一种用于描述地球表面地形和地貌的数字化模型,它采用数字化的高程数据来表示地球表面的形态,为科学研究、资源开发和环境管理提供了重要的数据基础。
什么是DEM?DEM是一种数字地球表面的模型,它可以揭示地球表面的高程、倾斜度和方向等重要地形特征。
DEM通过测量和记录地形的高程数据,将这些数据转换为数字化的形式,从而形成高程、坡度、坡向等地形要素的三维模型。
DEM的构建DEM的构建通常包括以下几个步骤:1. 数据采集DEM的构建首先需要进行地形数据的采集。
目前常用的数据采集方法包括全球导航卫星系统(Global Navigation Satellite System,GNSS)测量、航空摄影测量、激光雷达测量等。
这些方法可以获取高精度、高分辨率的地形数据。
2. 数据处理在数据采集之后,还需要进行数据处理。
数据处理包括数据的预处理、滤波、插值等步骤。
通过这些步骤的处理,可以提高DEM的精度和准确性。
3. DEM模型生成在数据处理完成后,可以根据处理过的高程数据生成DEM模型。
DEM模型可以以栅格形式或矢量形式呈现,栅格DEM将地表分割成网格状的单元,每个单元对应一个高程值,矢量DEM则以点、线和面等要素描述地表的高程。
4. DEM的应用生成DEM模型后,可以将其应用于各种领域。
DEM在水文学、地质学、生态学、城市规划等领域具有重要的应用价值。
它可以用于水文模拟、地质灾害评估、生态环境监测、城市规划设计等方面。
DEM的重要性DEM作为地理信息系统和遥感技术的关键组成部分,具有以下重要性:1. 提供地形信息DEM可以提供地球表面的高程、倾斜度和坡向等地形信息。
这些信息对于地理分析、地形建模以及许多其他地理应用非常重要。
DEM制作流程
DEM制作流程⼀、前期准备在ENVI中打开六幅影像,进⾏观察,选出每个岛对应图像较清晰的2景进⾏DEM的制作,经观察后,选取以下4景影像进⾏操作:①贡⼠礁和北⼦岛:po_517201_grn_0020001和po_517201_grn_0010001②南⼦岛和奈罗丁礁:po_517201_grn_0020000和po_517201_grn_0010000注:4景影像都选取绿⾊波段,因为看起来较清晰⼆、制作过程㈠、在ENVI中输⼊⽴体像对定义连接点⽣成初步DEM由于没有已知点的真实⾼程信息,是相对⾼程进⾏操作,所以选取连接点是⽐较关键的⼀步,下⾯分别通过系统⾃动⽣成连接点和⽤户⾃定义连接点两种⽅法来进⾏阐述。
1、系统⾃动⽣成连接点⑴在ENVI中依次打开Topographic, DEM Extraction, DEM Extraction Wizard, New,出现DEM Extraction Wizard对话框,单击Select Stereo Images,输⼊⽴体像对,左⽚选择星下点成像的或⼊射⾓较⼩的影像。
在影像⾼程对话框中输⼊该地区中最⼤和最⼩⾼程。
①贡⼠礁和北⼦岛:左⽚—po_517201_grn_0020001右⽚—po_517201_grn_0010001最⼤⾼程:50m 最⼩⾼程:-10m②南⼦岛和奈罗丁礁:左⽚—po_517201_grn_0020000右⽚—po_517201_grn_0010000最⼤⾼程:50m 最⼩⾼程:-10m注:最⼤和最⼩⾼程是找了⼀些图⽚和资料再加上⾃⼰估算设定的下⼀步⑵选取控制点,因为没有控制点,所以选no GCPs下⼀步⑶选取连接点,选择系统⾃动⽣成连接点(generate tie points automatically),设定各项参数①贡⼠礁和北⼦岛:number of tie points :50 (设定值可在25—100内,但不⼀定数值越⼤配准的连接点越多,还要与搜索窗⼝和移动窗⼝配合,这⾥选取50较好,成功配准的点较多)search window size:91 (搜索窗⼝⼤⼩取决于地形粗糙程度,值必须⼤于等于21,不宜选择过⼩,值过⼩会导致成功配准的连接点数量减少,值越⼤连接点配准点越多,但是同时也会减慢运算速度,建议在51-181之间选取)moving window size:19 (移动窗⼝的⼤⼩必须是⼤于等于5的奇数,⽽且必须⼩于搜索窗⼝的⼤⼩,他的数值⼤⼩也取决于图像的分辨率—分辨率⼩于1m取值范围:21-81;分辨率1-5m取值范围:15-41;分辨率5-10取值范围:11-21;分辨率⼤于10m取值范围:9-15)region elevation:20②南⼦岛和奈罗丁礁:number of tie points :50 (设定值可在25—100内,但不⼀定数值越⼤配准的连接点越多,还要与搜索窗⼝和移动窗⼝配合,这⾥选取50较好,成功配准的点较多)search window size:91 (搜索窗⼝⼤⼩取决于地形粗糙程度,值必须⼤于等于21,不宜选择过⼩,值过⼩会导致成功配准的连接点数量减少,值越⼤连接点配准点越多,但是同时也会减慢运算速度,建议在51-181之间选取)moving window size:11region elevation:20下⼀步⑷连接点配准出现校准对话框,可以通过“likely error ranking”来查看各连接点的错误概率排序,点击检查每⼀个点来校准,可以通过系统⾃动预测“predict”或⼿动修正使“maximum Y parallax”的数值⼩于10,即可进⾏下⼀步操作,在本次操作中:贡⼠礁和北⼦岛:7.6573南⼦岛和奈罗丁礁:8.0234下⼀步⑸构建核共线影像影像,创建并保存左影像和右影像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(5) Eliminate合并破碎多边形(选做,需要8-10分钟)
新建地图文档,加载坡度多边形图层:TinSlopef, 打开TinSlopef的属性表,添加一个字段Area(类型为Double),通过[计算值]操作,计算各个多边形的面积:
选中高级,输入VBA代码到[Pre-Logic VBA Script Code],输入变量[dblArea]到[Area=] 下的输入框中。
坡度栅格中,栅格单元的值在[ 0 -90 ] 度间变化
(4) 右键点击图层[Slope of tingrid],执行[属性命令],设置图层[符号],重新调整坡度分级(参考[1.2 (4) ] 中的步骤进行分类 )
以下计算剖面曲率:
(5) 执行菜单命令:[3D分析]>>[表面分析]>>[坡度]。按如下所示,指定各参数:
1.2由高程点、等高线矢量数据生成TIN转为DEM
在ArcMap中新建一个地图文档
(1) 添加矢量数据:Elevpt_Clip、Elev_Clip、Boundary、Erhai(同时选中:在点击的同时按住Shift)
(2) 激活“3D Analyst”扩展模块(执行菜单命令 [工具]>>[扩展],在出现的对话框中选中3D分析模块),在工具栏空白区域点右键打开[3D分析] 工具栏
(2) 在[3D 分析] 工具栏中,执行菜单命令:[3D 分析]>>[表面分析]>>[视域],按下图所示指定各参数:
(3) 生成可视区栅格:[ ViewShed of 移动基站 ]:
其中绿色表示现有发射基站信息已覆盖的区域,淡红色表示,无法接收到手机信号的区域
2.6地形剖面
确定后得到DEM数据:TinGrid, 其中,每个栅格单元表示50m×50m的区域
1.2 TIN的显示及应用
(1) 在上一步操作的基础上进行,关闭除[TIN]之外的所有图层的显示,编辑图层[tin]的属性,在图层属性对话框中,点击[符号] 选项页,将[ 边界类型 ] 和 [ 高程 ] 前面检查框中的勾去掉; 点击 [ 添加 ] 按钮
3. 结合实际,掌握应用DEM解决地学空间分析问题的能力。
1. TIN 及DEM 生成 1
1.2由高程点、等高线矢量数据生成TIN转为DEM 1
1.2 TIN的显示及应用 3
2. DEM的应用 15
2.1坡度:Slope 15
2.2 坡向:Aspect 18
2.3提取等高线 20
2.4计算地形表面的阴影图 21
2.5可视性分析 24
2.6地形剖面 26
1. TIN 及DEM 生成
数据:矢量图层:高程点Elevpt_Clip.shp,高程Elev_Clip.shp,边界Boundary.shp,洱海Erhai.shp
(6) 得到剖面曲率栅格:[Slope of Slope of tingrid]
2.2 坡向:Aspect
(1) 在上一步的基础上进行,关闭[Slope of tingrid]的显示。
(2) 执行菜单命令:[3D分析]>>[表面分析]>>[坡向],按下图所示,指定各参数:
2.3提取等高线
(1) 新建地图文档,加载DEM数据: [tingrid]。〔在执行以下操作时确保,3D分析扩展模块已激活〕
打开Arctoolbox,执行命令: [3D Analyst Tools]>>[ Raster Surface ]>> [ 等高线 ] 按上图所示指定各参数
(3) 得到坡向栅格:[Aspect of tingrid]
坡向栅格
以下计算平面曲率:
(4) 执行菜单命令:[3D分析]>>[表面分析]>>[坡度],按下图所示指定各参数:
(5) 生成平面曲率栅格:[Slope of Aspect of tingrid]:
(6) TIN 转换为 坡向多边形
参照以上第(4)步,得到坡向多边形图层
得到的坡向多边形中属性AspectCode的数值(-1,1,2,3,4,5,6,7,8,9)分别表示当前图斑的坡向(平坦、北、东北、东、东南、南、西南、西、西北、北),其中1,9是相同的可以合并为1
2. DEM的应用
2.1坡度:e
(1) 新建地图文档,加载[1.2(6)]中得到的DEM数据:TINGrid
(2) 加载3D分析扩展模块,打开[3D分析]工具栏,执行菜单命令[3D分析]>>[表面分析]>>[坡度], 参照下图所示,指定各参数
(3) 得到坡度栅格slope of TinGrid:
(5) 确定生成文件的名称及其路径,生成新的图层tin,在TOC(内容列表)中关闭除[TIN]和[Erhai]之外的其它图层的显示,设置TIN的图层(符号)得到如下的效果。
(6) 执行工具栏[3D分析]中的命令[转换]>>[TIN转换到栅格],指定相关参数:属性:[高程],像素大小:[50],输出栅格的位置和名称: [TinGrid]
Eliminate(合并破碎多边形)操作原理
原始多边形 合并后多边形,选中的(面积<=10000m2 )多边形被合并到与之相邻的面积最大的多边形中
将地图适当放大,比较原始图层:tinSlopef 与合并后的图层:tinSlopef_Eliminate
请参照上图进行设置
在上面的对话框中,选中Slope,点击 [分类] 按钮,在下面的对框中,将[类] 指定为 5,然后在 [间隔值] 列表中输入间隔值: [ 8, 15,25, 35, 90] ,如下图所示
点击两次 [确定] 后关闭图层属性对话框,图层[ tin ] 将根据指定的渲染方式进行渲染,效果如下图所示 :
(1) 在上一步基础上进行,打开 [ 3D分析 ] 工具栏,点击 [插入线] 工具,跟踪一条线段,这条线段可以从DEM:[TINGRID] 中得到高程值,
(2) 点击[ 创建剖面图 ] 按钮,得到上一步所生成的3D线段的剖面图:
(3) 执行工具栏[3D分析]中的菜单命令[3D分析]>>[创建/修改TIN]>>[从要素生成TIN];
(4) 在对话框[从要素生成TIN中]中定义每个图层的数据使用方式;
在[从要素生成TIN中]对话框中,在需要参与构造TIN的图层名称前的检查框上打上勾,指定每个图层中的一个字段作为高度源(Height Source),设定三角网特征输入(Input as)方式。可以选定某一个值的字段作为属性信息(可以为None)。在这里指定图层[Erhai] 的参数:[三角网作为:]指定为[硬替换] ,其它图层参数使用默认值即可。
(2) 生成等高线矢量图层:Contour_tingrid:
2.4计算地形表面的阴影图
(1) 在上一步基础上进行,打开[3D 分析]工具栏
(2) 执行菜单命令:[ 3D分析 ]>>[表面分析]>>[ 山影 ],按下图所示指定各参数:
(3) 生成地表阴影栅格:[ Hillshade of tinGrid ]:
打开工具栏[效果],如下图所示,设置栅格图层[tingrid]的透明度为:[40%]左右。
2.5可视性分析
A.通视性分析
(1) 在上一步的基础上进行,打开[ 3D分析] 工具栏,从工具栏选择[ 通视线 ](Line of sight)工具:
(2) 在出现的[ 通视线 ]Line of Sight对话框中输入[观察者偏移量] 和 [目标偏移量], 即距地面的距离,如图:
地形分析:TIN及DEM的生成及应用
DEM是对地形地貌的一种离散的数字表达,是对地面特性进行空间描述的一种数字方法、途径,它的应用可遍及整个地学领域。通过对本次实习的学习,我们应:
1. 加深对TIN建立过程的原理、方法的认识;
2. 熟练掌握ArcGIS中建立DEM、TIN的技术方法。
(4) DEM渲染:
如以下第2幅图所示,关闭除[tingrid] 和 [Hillshade of tingrid]以外所有图层的显示,并将[ tingrid ] 置于[ Hillshade of tirngrid] 之上,右键点击[ tingrid] ,在出现的右键菜单中执行[ 属性 ],在[图层属性]对话框中,参照下图所示设置[符号]选项页中颜色。
(2) 在 [添加渲染] 对话框中,将 [所有边用同一符号进行渲染] 和 [ 所有点用同一符号进行渲染 ] 这两项添加么TIN的显示列表中,
(3) 将TIN图层局部放大,认真理解TIN的存储模式及显示方式
(4) TIN 转换为 坡度多边形
新建地图文档,加载图层 [tin],参考上一步操作,将 [面坡度用颜色梯度表进行渲染] 和 [面坡向用颜色梯度进行渲染] 这两项添加到TIN的显示列表中,
执行[3D分析]工具栏中的命令[转换]>>[TIN转换到矢量],按下图所示指定各参数:
得到多边形形图层:[ tinSlopef] ,它表示研究区内各类坡度的分布状况,结果是矢量格式,打开其属性表可以看到属性 [SlopeCode] 为 数值[1,2,3,4,5]
查看矢量图层:tinSlopef 中要素属性表,其中属性[SlopeCode]1,2,3,4,5分别表示坡度范围(0-8)、(8-15)、(15-25)、(25-35)、(>35)
在地图显示区中从某点[A]沿不同方向绘制多条直线,可以得到观察点 [A] 到不同目标点 的通视性:
绿色线段表示可视的部分,红色线段表示不可见部分
B.可视区分析:移动发射基站信号覆盖分析
(1) 在上一步基础上进行,在内容列表区[TOC]中关闭除 [tingrid] 之外的所有图层,加载移动基站数据-矢量图层:[移动基站.shp]