基于单片机的步进电动机驱动系统
基于AT89S52单片机的步进电动机控制模块设计
基于AT89S52单片机的步进电动机控制模块设计文章设计了一种步进电动机控制系统,使用AT89S52单片机控制2相步进电机,由单片机产生驱动脉冲信号,通过按键控制步进电机的启停和步进方向,可根据实际需要对单片机进行编程,并通过Proteus仿真软件对系统进行仿真和测试。
标签:AT89S52单片机;步进电动机;控制引言步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步,所以又称脉冲电动机。
步进电动机实际上是一种单相或多相同步电动机。
单相步进电动机由单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。
多相步进电动机由多相方波脉冲驱动,在经功率放大后分别送入步进电动机各相绕组。
当向脉冲分配器输入一个脉冲时,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。
在非超载的情况下,电动机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电动机加一个脉冲信号,电动机则转过一个步距角。
这一线性关系的存在,加上步进电动机只有周期性的误差而无累计误差等特点,使得在速度、位置等控制领域用步进电动机来控制变得非常简单。
本研究利用AT89S52单片机的四路I/O通道实现环形脉冲的分配,控制步进电动机匀速、连续的按固定方向转动,通过按键控制步进电动机的旋转角度。
1 系统设计用AT89S52单片机来作为整个步进电动机控制系统的核心部件,其系统设计总框图如图1所示。
真个系统包括单片机最小系统、电机驱动模块、独立按键模块等。
图1 系统设计总体框图1.1 单片机最小系统单片机最小系统主要负责产生控制步进电动机转动的脉冲,通过单片机的软件编程代替环形脉冲分配器输出控制步进电机的脉冲信号,步进电机转动的角度大小与单片机输出的脉冲数成正比,步进电机转动的速度与输出的脉冲频率成正比,而步进电机转动的方向与输出的脉冲顺序有关。
1.2 电机驱动模块电机驱动模块负责将单片机发给步进电机的信号功率放大,从而驱动电机工作。
基于AT89C51单片机的步进电动机控制系统设计
重庆科技大学本科毕业论文基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXX X 准考证号: XXXXXXXXXXXX 专业层次:本科院(系):XXXXXXXXXXXXXXXXXXX 指导教师: XXXXXX 职称:讲师重庆科技大学二O一二年月日基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXXX准考证号: XXXXXXXXXXXX专业层次:本科指导教师: XXXXXXX院(系):机械与动力工程学院重庆科技大学二O一二年九月二十日摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。
实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。
本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。
关键词:步进电机,单片机,正反转控制,键盘控制,LCD液晶显示Based on the AT89C51 single-chip stepper motor controlsystem designABSTRACTWith the development of microelectronics and computer technology, the stepper motor demand grow with each passing day, which is widely used in printers, electric toys and other consumer products, industrial robots and CNC machine tools, medical equipment and other mechanical and electrical products, the national economy in various fields are applied. Study of stepping motor control system, to improve the control precision and response speed, energy saving etc have important significance.A stepper motor can be converted into electric pulse signal of angular displacement or line displacement of the mechanical and electrical components, a stepper motor control system is mainly composed of a stepping controller, a power amplifier and a stepper motor. Using single chip microcomputer control, using software to replace the stepping controller, which has the advantages of simple circuit, low cost, reliability is increased. Software programming can produce different types of step motor excitation sequence to control stepper motor operation mode.This design is the use of AT89C51 single-chip stepper motor control, through the I/O port output timing square wave as a stepper motor control signal, the signal through the ULN2003 chip stepper motor driver.Practice has proved, based on the single chip microcomputer to control the step motor than the traditional stepping controller has better performance, more simple, convenient, and reliable. The design of the main research object is the open loop servo system in the most commonly used executive device -- stepping motor.Keywords:Stepper motor, MCU, Positive control, Keyboard control, LCD liquid crystal display目录中文摘要 (I)英文摘要 (II)1 绪论 (1)1.1 步进电机及其发展 (1)1.2 步进电机在我国的发展应用及前景 (1)1.3 设计研究内容 (2)2 控制系统硬件分析与设计 (3)2.1 步进电机 (3)2.1.1 步进电机的原理 (3)2.1.2 步进电机的特点 (4)2.1.3 步进电机的分类 (4)2.1.4 永磁步进电机的控制原理 (5)2.2 单片机的选择 (6)2.2.1 单片机的引脚功能 (6)2.2.2 主要特性 (6)2.3 步进电机控制系统的组成 (7)2.3.1 键盘控制电路 (7)2.3.2 LCD液晶显示电路 (8)2.3.3 步进电机驱动电路 (10)3 控制系统软件分析与设计 (13)3.1 程序流程图 (13)3.2 读键盘子程序流程图 (14)3.3 键盘处理子程序流程图 (14)3.4 电机控制中断程序流程图 (15)4 调试与改进 (17)4.1 调试与改进 (17)4.2 运行结果 (17)结论 (19)致谢 (20)参考文献 (21)附录一 (22)附录二 (27)论文原创性声明1 绪论1.1 步进电机及其发展步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
基于PIC单片机的步进电动机控制系统设计

i
匿H — 越 H .H — .. — — — . — H — 邈 ,— 遨 — — 迸f
图 1 步进 电动机驱动 电源方框 图
;
;
j
在 步 进 电 动机 的实 际运 行 过 程 中 , 由加 速度 频 率 特性 可得 , 如果 运 行频 率大 于起 动频 率 时 , 进 电 步 动 机会 发生 失 步 现象 。同样 , 当运 行 频 率 突 然停 止 时, 步进 电动机会 由于惯性 作 用产 生过 冲现 象 , 造成 位 置不 精确 。如 果 频 率 过低 , 进 电动 机 的 速度 又 步 会 太慢 。所 以加 减速 过程 控制 的好 坏 直接决 定 了步 进 电动 机 的控制 精度 。在 不发 生失 步 和过 冲现 象 的 前 提下 , 步进 电动 机 从 一 个 位 置 快 速精 确 地 移 动 使
对步进电动机的速度和位置控制 。较好地 解决了步进 电动机运动 过程 中存在 的失 步 、 冲等现象 , 出了控制 系统 过 给
的主要硬件 电路及软件 的设计 , 并利用 c语 言实 现了 PC单 片机对 步进电动机 的精确控制 。 I
关键词 : 步进 电动机 ; 查表法 ; 参数法 ; 速度 ; 位置 ;I 1F 7 PC 6 87
Ke r s se p rmoo ;o k u a l t o p r me r t o s e d; o i o P C1 F 7 y wo d : tp e t r l o - p t b e meh d; a a t c me h d; p e p st n; I 6 8 7 i i
…
…
堕堕 … 曼 皇 . 蔓
旦…一…………… ………. … …………………………
基于单片机的步进电机控制系统设计

中国地质大学(武汉)远程与继续教育学院本科毕业论文(设计)指导教师指导意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计中国地质大学(武汉)远程与继续教育学院本科毕业设计(论文)评阅教师评阅意见表学生姓名:学号:专业:电气工程及其自动化毕业设计(论文)题目:基于单片机的步进电机控制系统设计论文原创性声明本人郑重声明:本人所呈交的本科毕业论文《基于单片机的步进电机控制系统设计》,是本人在导师的指导下独立进行研究工作所取得的成果。
论文中引用他人的文献、资料均已明确注出,论文中的结论和结果为本人独立完成,不包含他人成果及使用过的材料。
对论文的完成提供过帮助的有关人员已在文中说明并致以谢意。
本人所呈交的本科毕业论文没有违反学术道德和学术规范,没有侵权行为,并愿意承担由此而产生的法律责任和法律后果。
论文作者(签字):日期:2014 年9 月 1 日摘要本文应用单片机、步进电机驱动芯片、执行部件等,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。
二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/Y轴方向联动。
文中讨论了一种以最少参数确定一条圆弧轨迹的插补方法和步进电机变频调速的方法。
步进电机控制系统的开发采用了软硬件协同仿真的方法,可以有效地减少系统开发的周期和成本。
最后给出了步进电机控制系统的应用实例。
目录一、绪论 (5)(一)引言 (5)(二)步进电机常见的控制方案与驱动技术简介 (6)(三)本文研究的内容 (9)二、步进电机概述 (11)(一)步进电机的分类 (11)(二)步进电机的工作原理 (11)三、系统的硬件设计 (16)(一)系统设计方案 (16)(二)单片机最小系统 (17)(三)串口通信模块 (22)(四)数码管显示电路设计 (23)(五)电机驱动模块设计 (25)(六)驱动电流检测模块设计 (27)(七)独立按键电路设计 (32)四、系统的软件实现 (33)(一)系统软件主流程图 (33)(二)系统初始化流程图 (33)(三)按键子程序 (34)(四)系统组成 (37)(五)程序设计 (39)五、结论 (56)(一)具体结论 (56)(二)后续工作 (56)致谢 (57)参考文献 (58)一、绪论(一)引言步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pulse motor或Stepper servo,其应用发展已有约80年的历史。
单片机课程设计步进电机
单片机课程设计-步进电机江南大学物联网工程学院课程设计报告课程名称:单片机原理及应用设计题目:基于单片机的步进电机控制器设计班级:姓名:学号:指导教师:评分:年月日基于单片机的步进电机控制器设计摘要:本设计是用80C52单片机作为核心部件进行逻辑控制及信号产生,用单片机技术和C 语言编程设计来进行步进电机的控制。
通过人手动按开关实现步进电机的启动与停止、步进电机的正转反转,加速及减速等功能,此外还有LCD 数码管进行实时显示功能。
同时本文也通过了proteus软件的仿真,在仿真结果中能看出近似真实的效果。
经过proteus仿真,结果表明,系统实现了要求。
该系统电路简单,可靠性强,运行稳定。
关键词:步进电机单片机LCD proteus 仿真1课题主要研究内容和要求本设计采用单片机80C52来作为整个步进电机控制系统的运动控制核心部件。
所选的步进电机是四相五线的,由于步进电机需要高功率驱动,单片机不能与步进电机直接相连,因此我们需要采用了电机驱动芯片ULN2003连接步进电机和单片机。
为了显示步进电机转速,我用数码管来显示速率。
再加上一些独立按键来实现步进电机调速、改变转向的功能。
这样就构成了一个基本的步进电机控制系统。
系统的具体功能和要求如下:1、电机转速可以平稳控制;2、通过键盘和显示器可以设置电机的转速;3、能显示电机的运动趋势;2所需仪器设备所需器件备注所需器件备注STC89C52一片12M晶振一个单片机ULN2003驱一片按键五个动芯片八位共阳数一片异步电机一个码管芯片不同阻值电若干+5V电源一个阻30pF电容两个3系统总体设计本设计的硬件电路包括独立按键控制模块、步进电机驱动模块、数码管显示模块和单片机最小系统四部分。
单片机最小系统由时钟电路和复位电路组成,保证单片机正常运行;独立按键控制模块由开关和按键组成,当按下按键时,该系统就按照该按键控制的功能运作;显示模块主要是为了显示电机的工作状态和转速;驱动电路主要是对单片机输出的脉冲进行功率放大,从而驱动电机转动。
基于单片机的步进电机控制系统

基于单片机的步进电机控制系统摘要:传统步进电机控制系统往往采用硬件电路构成的控制器,电路复杂不易实现。
本文研究了基于单片机的步进电机控制方法,电路简单,实现了软件对电机进行各种操作,既降低了硬件成本又提高了控制的灵活性。
abstract: the traditional stepper motor control system is often used controller with hardware circuit which is not easy to achieve due to complex circuit. this paper studied stepper motor control method based on scm whose circuit is simple. it achieves various operations to motor of software,reduces hardware cost and increases the flexibility of the control.关键词:单片机;步进电机key words: scm;stepper motor中图分类号:tp31 文献标识码:a 文章编号:1006-4311(2013)05-0185-020 引言随着微电子技术和计算机技术的发展,步进电机广泛应用于电动玩具、打印机等消费类产品以及数控车床、医疗器械等机电类产品中,研究步进电机的控制系统,对提高控制的精度和响应速度以及节约成本方面都具有重要意义。
1 步进电机控制系统整体设计步进电机控制系统能够实现对步进电机转速、旋转时间(0s-9999s)的任意设定,并且支持正反转两种旋转方式。
同时具有简单的人机交互界面,是人们更加容易操作。
本系统由硬件系统和软件系统两部分组成。
硬件设计由单片机最小系统、电源模块、键盘控制模块、显示模块组成;软件设计包括键盘控制、步进电机脉冲、显示模块、以及转速计算模块的控制程序,最终实现对步进电机转动方向、转动时间的控制,并将步进电机的的转动速度、转动剩余时间显示在显示模块上面,如图1所示。
基于单片机AT89C52的步进电机的控制器设计

基于单片机AT89C52的步进电机的控制器设计步进电机是一种非常常见的电机类型,由于其具有精准定位、适应高速运动以及控制简单等特点,被广泛应用于各种自动化设备中。
本文将从步进电机的工作原理、控制方式以及基于单片机AT89C52的步进电机控制器设计等方面展开阐述。
首先,我们来了解步进电机的工作原理。
步进电机是一种特殊的同步电动机,它具有内置的磁化轭,在没有外部励磁的情况下也能自动旋转。
步进电机的旋转是由控制电流方向和大小来实现的。
通常情况下,步进电机每转动一定角度,称为“步距角”,它可以是1.8度、0.9度、0.45度等,不同的步距角决定了电机的分辨率。
步进电机的控制方式主要有全步进和半步进两种。
全步进是指每次控制信号脉冲后,电机转动一个步距角。
而半步进则是在全步进基础上,在脉冲信号中引入一半步距角的微调。
控制信号脉冲可以是脉冲序列或者方波信号。
基于单片机AT89C52的步进电机控制器设计主要包括控制信号发生器的设计和步进电机驱动电路的设计。
控制信号发生器负责产生相应的控制信号脉冲,而步进电机驱动电路将这些脉冲信号转化为电流信号驱动步进电机。
控制信号发生器的设计可以采用定时器/计数器模块来实现。
AT89C52芯片具有可编程的定时器/计数器,可以用来产生控制信号的脉冲。
通过设置定时器的工作方式和计数值,可以实现不同频率、占空比的控制脉冲。
步进电机驱动电路的设计主要包括功率级驱动电路和电流控制电路。
功率级驱动电路负责将控制信号转化为足够大的电流驱动步进电机,通常采用功率放大器来实现。
电流控制电路则用来控制驱动电流的大小,使步进电机能够顺畅工作。
电流控制电路通常采用可调电阻、电流检测电阻和比较器等元件组成。
在步进电机控制器设计中,还需要考虑到步进电机的特性和应用需求。
例如,步进电机的电源电压、额定电流、阻抗、扭矩等参数需要与驱动电路匹配。
此外,还需要考虑到步进电机的机械结构、位置传感器、防重叠措施等因素。
51单片机驱动步进电机的方法
51单片机驱动步进电机的方法一、步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构,广泛应用于各种自动化设备中。
其工作原理是,当一个脉冲信号输入时,电机转动一个步距角,从而实现电机的精确控制。
二、51单片机驱动步进电机的方法1、硬件连接需要将51单片机与步进电机连接起来。
通常,步进电机需要四个引脚,分别连接到单片机的四个GPIO引脚上。
同时,还需要连接一个驱动器来提高电机的驱动能力。
2、驱动程序编写接下来,需要编写驱动程序来控制步进电机的转动。
在51单片机中,可以使用定时器或延时函数来产生脉冲信号,然后通过GPIO引脚输出给电机。
同时,还需要设置电机的步距角和转向,以保证电机的精确控制。
3、示例程序以下是一个简单的示例程序,用于演示如何使用51单片机驱动步进电机:cinclude <reg52.h> //包含51单片机的头文件sbit motorPin1=P1^0; //定义连接到P1.0引脚的电机引脚sbit motorPin2=P1^1; //定义连接到P1.1引脚的电机引脚sbit motorPin3=P1^2; //定义连接到P1.2引脚的电机引脚sbit motorPin4=P1^3; //定义连接到P1.3引脚的电机引脚void delay(unsigned int time) //延时函数unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);void forward(unsigned int step) //正转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin1=1;motorPin3=1;motorPin2=0;motorPin4=0; //设置转向和步距角delay(step); //延时一段时间void backward(unsigned int step) //反转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin2=1;motorPin4=1;motorPin3=0;motorPin1=0; //设置转向和步距角delay(step); //延时一段时间void main() //主函数unsigned int step=1000; //设置步距角为1000微步forward(step); //正转一圈backward(step); //反转一圈while(1); //循环等待,保持电机转动状态在这个示例程序中,我们使用了四个GPIO引脚来控制步进电机的转动。
基于C51单片机步进电机综合控制实验

重庆工商大学计算机与信息工程学院学院《单片机原理及应用》课程实验报告实验名称:步进电机综合控制实验实验班级:2010级自动化专业班级:2010级自动化三班指导老师:文远熔组员:陶园2010133330 王路2010133344江洋2010133335陈娅2010133326张琴芳2010133317张丹2010133320(组长)一、摘要:本实验利用8051单片机达到控制步进电机的启动、停止、正转、反转、点动、转过指定角度、状态显示和数据指示的目的,使步进电机控制更加灵活。
步进电机驱动芯片采用ULN2003,ULN2003具有大电流、高电压,外电路简单等优点。
利用ZLG7290模块驱动LED数码管显示速度设定值。
通过这个单片机控制系统的设计来掌握步进电机的工作原理和驱动过程以及LED显示原理和ZLG7290模块的使用方法,用LED数码管显示实验要求的状态结果,设计电路的硬件接线图和实现上述要求的程序。
关键词:51单片机步进电机ZLG7290 ULN2003二、设计内容与要求:1、任务介绍:实现步进电机按规定的速度正转、反转,转过指定的角度,要有点动功能。
所有命令通过键盘输入,步进电机在运行过程中要有状态和数据指示。
2、每套设计文档应包括:系统原理说明、程序框图、电路原理图和程序清单。
三、实验器件介绍及原理:本实验采用单片机来控制步进电机,实现了软件与硬件相结合的控制方法。
在单片机环境下,用ULN2003驱动芯片驱动步进电机,用ZLG7290芯片作用下的按键控制步进电机的运行,从而达到实验要求。
其控制框图(图一)为:图一:控制框图1、系统硬件介绍1.1步进电机1.1.1相关的技术指标:a、相数:指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机,本实验用的是四相步进电机。
电机相数不同,其步距角也不同。
b、步距角:表示控制系统每发一个步进脉冲信号,电机所转动的角度。
本实验程序运行前要先测量步进电机的步距角。
基于单片机的步进电动机驱动系统
. 文采 用 单片 机 A m 19 5 本 t e C 1来 控 制步 进 电动 机 , 过 8 通
软件和 硬件两 种方 法进行 脉 冲分 配 , 分别论 述 了各 自的设计 方案 和优缺 点. 并
1 系统 设计
步进 电动机 的控制信 号 由单 片机 A m 1 C 1 提供 , te 9 5 来 8 通过发 送脉 冲信号 的个数 和频 率分别 控制 电机 的角位 移和 速度 . 冲 的分 配采 用两种 方案 , 脉 一是采 用单 片机直 接 实现 , 是 由脉 冲分 配芯 片 L 9 二 2 7实现 .
1 1 单片机 实现脉 冲分 配控制 电机 . A ME T L公 司 的 A 8 C 1 多功能 8位 C U和 4K字 节 T9 5 将 P
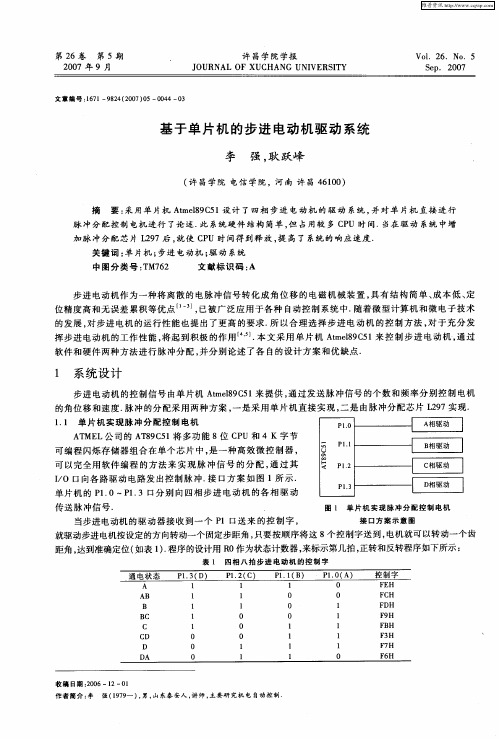
可 编程闪烁存 储器 组合在 单个 芯片 中 , 是一 种高效 微控 制 器 , 可 以完全用 软件 编程 的方 法来 实 现 脉 冲信 号 的分 配 , 过 其 通 I0 口向各路 驱动 电路发 出控制 脉 冲. 口方案 如 图 1所 示 . / 接
单 片机 的 P . 1 0~P . 1 3口分别 向四相 步进 电动 机 的各 相驱 动
传送 脉 冲信 号 . 当步进 电动机 的驱动 器接 收到 一个 P 1口送 来 的控 制 字 ,
图 1 单片机实现脉冲分配控制电机 接口方案示意图
就驱动步进 电机按设定 的方向转动一个固定步距角 , 只要按顺序将这 8 控制字送到 , 个 电机就可 以转动一个齿
基 于 单片 机 的步 进 电动机 驱 动 系统
李 强 , 跃峰 耿
( 昌学院 电信 学院 ,河 南 许 昌 4 10 许 60)
摘 要 : 用单 片机 A m 1 C 1 计 了四相 步进 电动 机 的驱 动 系统 , 采 te 9 5 设 8 并对 单 片机 直接 进行 脉 冲分 配控制 电机进行 了论 述. 系统硬 件 结构 简单 , 占用较 多 C U 时 间. 此 但 P 当在 驱动 系统 中增
基于stm32的步进电机控制系统设计与实现

基于STM32的步进电机控制系统设计与实现1. 引言步进电机是一种常见的电动机类型,具有定位准确、结构简单、控制方便等优点,在自动化控制领域得到广泛应用。
本文将介绍基于STM32单片机的步进电机控制系统设计与实现,包括硬件设计、软件开发和系统测试等内容。
2. 硬件设计2.1 步进电机原理步进电机是一种将输入脉冲信号转换为角位移的设备。
其工作原理是通过改变相邻两相之间的电流顺序来实现转子旋转。
常见的步进电机有两相、三相和五相等不同类型。
2.2 STM32单片机选择在本设计中,我们选择了STM32系列单片机作为控制器。
STM32具有丰富的外设资源和强大的计算能力,非常适合用于步进电机控制系统。
2.3 步进电机驱动模块设计为了实现对步进电机的精确控制,我们需要设计一个步进电机驱动模块。
该模块主要包括功率放大器、驱动芯片和保护电路等部分。
2.4 电源供应设计步进电机控制系统需要稳定可靠的电源供应。
我们设计了一个电源模块,用于为整个系统提供稳定的直流电源。
3. 软件开发3.1 开发环境搭建在软件开发过程中,我们需要搭建相应的开发环境。
首先安装Keil MDK集成开发环境,并选择适合的STM32单片机系列进行配置。
3.2 步进电机控制算法步进电机控制算法是实现步进电机精确控制的关键。
我们可以采用脉冲计数法、速度闭环控制等方法来实现对步进电机的位置和速度控制。
3.3 驱动程序编写根据硬件设计和步进电机控制算法,我们编写相应的驱动程序。
该程序主要负责将控制信号转换为驱动模块所需的脉冲信号,并通过GPIO口输出。
3.4 系统调试与优化在完成软件编写后,我们需要对系统进行调试和优化。
通过调试工具和示波器等设备,对系统进行性能测试和功能验证,以确保系统工作正常。
4. 系统测试与评估在完成硬件设计和软件开发后,我们需要对系统进行全面的测试和评估。
主要包括功能测试、性能测试和稳定性测试等内容。
4.1 功能测试功能测试主要验证系统是否按照预期工作。
基于单片机的步进电机控制系统设计

基于AT89C52单片机的步进电机控制系统设计摘要:步进电机专用开发系统,适用于数控机床及某些特定条件及系统。
本文通过单片机为开发平台,对步进电机进行控制.采用单片机A T89C52,根据输入的数据转化成的控制信号来控制步进电动机的角位移的一种方法,包括硬件设计和软件设计.整个系统主要由电机驱动电路,声光报警电路,4位LED显示电路,电源电路及核心单片机部分构成。
利用单片机产生步进电机驱动脉冲,通过4×4矩阵键盘能实现对步进电机启动、停止功能的选择以及加速、减速、反转功能的选择,使用方便、操作简单。
其中在步进电机控制器的设计中,重点阐述脉冲产生电路以及对速度的控制,实现对步进电机速度精确控制的开发系统.提高步进电机的步进精度,能够控制三相或四相步进电机。
且电路简单,成本较低,控制方便,移植性强.实用价值高。
关键词:A T89C52;步进电机;脉冲产生Design of Control System for Stepping Motor Based onAT89C52Abstract:A stepper motor dedicated development system,applicable to CNC machine tools and some special conditions and system. In this paper,through the SCM as the development platform,for the stepper motor control。
The paper introduce one way that controls the stepping motor by microcomputer AT89C52 depending on the control signal to which input data convert control the line displacement of the stepping motor,namely simply graph plotter,including its hardware and software。
基于单片机的步进电机细分控制系统
K EYW O RDS s e t ppig ot r, s n m o ubd vson d i ontol M CU i ii rve c r ,
h g c u a y s di son o t p pic ng e oft t pp n m ot r By a l i g t ub vson d ii g i cpl ft e sep ng i h a c r c ub vii fs e t h a l he s e i g o. nayzn he s di ii rv n prn i e o h t pi
b e dn tp moo r ig c i L 9 / 9 ,t e d iig c n r l y tm fse t ro wi h mo e a d c n tn u r n a ln igse t rd i n h p 2 7 2 8 h r n o to s se o tp moo fs t — d n o sa tc re tw s v v c
中图 分 类 号 :TP 3 2 文 献 标 识 码 :A
AB T S RAC S e p n t rs b i ii n t c n l g i l s d t n r a et e o e a i n l c u a y o h t ra d t c iv T t p i g mo o u d v so e h o o y i man y u e o ic e s h p r t a c r c f e mo o n O a h e e s o a t
基于MC68HC908SR12单片机的步进电机通用控制系统

1 — 5
维普资讯
控朗与应甩技术 l E
、 札 西控 制 应1 l7 4 1 ) 毛 ! 日2 , (0  ̄3
C I 2 V 1 A; Y E:U i oa 5 l d 步 O L:4 / 8 T P n— l e ; P r a 进角 为 1 8 。 . 。 1 4 演 示 系统 .
通过 一个 环线 变 阻 器实 现 位 置 反 馈 , 拟 位 模
置控 制 ; 通过 A D采 样 获取 数据 来 获 得步 进 电机 /
ito u d. The c nr le a o r lma y se mo o y t ms i h a tm e,a dem oo n i lic r e n r d ce o tol rc n c nto n tp— tr s se n t e me n i nd ma trnl n mu t— u v
维普资讯
迫札 与控 制应用20, 1 ) 07 4(0 3
控制与应用技术 E C MA
基 于 MC 8 9 8 R 2单 片 机 的 6 HC 0 1 S 步 进 电 机 通 用 控 制 系统
苏红 娟 , 傅 桂荣 ( 海交通 大 学 工程训 练 中心 , 海 上 上
S ogja . F u— n UH n - n u U G i og r
( hn h i io n nvri , h n h i 0 2 0, hn ) S a ga J t gU ies y S a g a 2 0 4 C ia a o t
Ab t a t h a d r n o t r e in o t p moo o tolrb s d o h 6 HC 0 S 2 a eman y s r c :T e h r wae a d s f wa ed s f e - trc n rle a e n t e MC 8 9 8 R1 r il g s
基于at89c52单片机的步进电机控制系统研究
基于at89c52单片机的步进电机控制系统研
究
AT89C52单片机是一种常见的8位微控制器芯片,具有低功耗、高性能、易于编程等特点。
步进电机是一种常见的电动驱动器件,适用于工业自动化、精密机械控制等领域。
本文介绍基于AT89C52单片机的步进电机控制系统研究。
步进电机的原理是将电信号转换为一定的机械行程,实现精准控制。
控制步进电机需要控制电流和脉冲信号,而AT89C52单片机具有高速计数器、PWM输出等功能,可以实现精准控制步进电机的转动角度和速度。
本系统采用AT89C52单片机作为控制核心,通过软件编程实现脉冲信号的产生和控制。
主要由AT89C52单片机、驱动电路、步进电机组成。
其中,驱动电路主要包括电源管理、电流检测、脉冲控制等模块。
步进电机主要包括定子和转子两个部分。
本系统的工作原理是通过AT89C52单片机产生脉冲信号,通过驱动电路将信号转化为合适的电流输入步进电机,使步进电机旋转。
具体步骤如下:
1.设定步进电机的转动角度和速度。
2.通过AT89C52单片机产生适当频率和占空比的脉冲信号。
3.驱动电路将脉冲信号转换为合适的电流输入步进电机。
4.步进电机根据电流的变化旋转相应角度。
5.根据实际控制需求实时修改脉冲信号的频率和占空比。
总之,基于AT89C52单片机的步进电机控制系统通过软件编程实现脉冲信号和驱动电路的控制,实现对步进电机的精准控制和运动。
该控制系统具有低功耗、高精度、易于编程等优点,在自动化、机器人控制等领域有广泛的应用前景。
基于AT89C51单片机的步进电机伺服系统设计
基于AT89C51单片机的步进电机伺服系统设计单片机的步进电机伺服系统是保证这一类型的单片机装置具备较强使用性能的关键性系统。
本文对这一系统设计工作存在的不足进行了分析研究,并且结合单片机装置操作的实际需要,对步进电机伺服系统进行了优化处理策略的制定,对提升单片机装置的综合性应用质量,具有十分重要的意义。
标签:单片机;步进电机;伺服系统单片机装置的有效应用是提升工业生产性质工作综合性操作价值的关键。
在当前科学技术快速发展的情况下,对步进电机伺服系统进行优化设计,可以为单片机装置应用价值的优化提供帮助,因此,伺服系统的设计已经受到社会各领域的高度关注。
1 单片机的步进电机伺服系统设计存在的不足(1)缺乏对步进电机伺服系统工作原理的合理分析。
目前,一些步进电机在进行基础性技术设计的过程中,对于单片机装置的应用要求研究不够全面,并没有按照电脉冲技术资源应用的实际需要处理步進电机的设计工作,难以为电脉冲技术的成熟应用提供支持。
一些步进电机在具体应用的过程中,对于电脉冲资源的价值应用不够完整,导致电动机装置在进行改进的过程中,很难结合电脉冲的特点进行伺服系统的设计,难以为电动机装置转动价值的控制提供支持。
一些步进电机装置在进行脉冲数调查分析的过程中,对于恒定电流的价值认识不够完整,并没有从脉冲频率的角度进行单片机装置的价值认识,难以为脉冲频率控制工作的改进提供有利支持。
还有部分单片机装置在进行伺服系统操作管理的过程中,对于脉冲数量的价值认识不够全面,并没有结合频率控制以及电动机装置设计的实际需要,制定与电动机转子状态相符合的伺服系统设计方案,很难为单片机装置应用状态的分析提供有利支持。
(2)单片机步进电机伺服系统软件设计存在不足。
目前,单片机装置在进行上位主机状态研究的过程中,对于上位主机的功能特点认识不够全面,缺乏对用户界面管理状态的研究,这就使得用户界面管理措施的设计工作很难成熟完整的适应步进电机装置管理控制工作的实际要求,难以为步进电机装置运行状态的有效监测提供保障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷 第5期许昌学院学报
Vol .26.No .5
2007年9月
JOURNAL OF XUCHANG UN I V ERSI TY Sep.2007
收稿日期:2006-12-01
作者简介:李 强(1979—),男,山东泰安人,讲师,主要研究机电自动控制.
文章编号:1671-9824(2007)05-0044-03
基于单片机的步进电动机驱动系统
李 强,耿跃峰
(许昌学院电信学院,河南许昌46100)
摘 要:采用单片机A t m el89C51设计了四相步进电动机的驱动系统,并对单片机直接进行
脉冲分配控制电机进行了论述.此系统硬件结构简单,但占用较多CP U 时间.当在驱动系统中增加脉冲分配芯片L297后,就使CP U 时间得到释放,提高了系统的响应速度.
关键词:单片机;步进电动机;驱动系统 中图分类号:T M762 文献标识码:A
步进电动机作为一种将离散的电脉冲信号转化成角位移的电磁机械装置,具有结构简单、成本低、定位精度高和无误差累积等优点[1-3]
,已被广泛应用于各种自动控制系统中.随着微型计算机和微电子技术的发展,对步进电机的运行性能也提出了更高的要求.所以合理选择步进电动机的控制方法,对于充分发
挥步进电动机的工作性能,将起到积极的作用[4,5]
.本文采用单片机A t m el89C51来控制步进电动机,通过软件和硬件两种方法进行脉冲分配,并分别论述了各自的设计方案和优缺点.
1 系统设计
步进电动机的控制信号由单片机A t m el89C51来提供,通过发送脉冲信号的个数和频率分别控制电机的角位移和速度.脉冲的分配采用两种方案,一是采用单片机直接实现,二是由脉冲分配芯片L297实现
.图1 单片机实现脉冲分配控制电机
接口方案示意图1.1 单片机实现脉冲分配控制电机
AT ME L 公司的AT89C51将多功能8位CP U 和4K 字节可编程闪烁存储器组合在单个芯片中,是一种高效微控制器,可以完全用软件编程的方法来实现脉冲信号的分配,通过其I/O 口向各路驱动电路发出控制脉冲.接口方案如图1所示.单片机的P1.0~P1.3口分别向四相步进电动机的各相驱动传送脉冲信号.
当步进电动机的驱动器接收到一个P1口送来的控制字,
就驱动步进电机按设定的方向转动一个固定步距角,只要按顺序将这8个控制字送到,电机就可以转动一个齿距角,达到准确定位(如表1).程序的设计用R0作为状态计数器,来标示第几拍,正转和反转程序如下所示:
表1 四相八拍步进电动机的控制字
通电状态
P1.3(D )
P1.2(C )
P1.1(B )
P1.0(A )
控制字A 1110FEH AB 1100FCH B 1101F DH BC 1001F9H C 1011F BH C D 0011F3H D 0111F7H DA
0110F6H
第26卷第5期李 强,等:基于单片机的步进电动机驱动系统
正转程序C W : I N C R0
CJNE R0,#08H,ZHENG MOV
R0,#00H ZHENG:
MOV A,R0MOV DPT R,#CT R MOVC A,@A +DPTR MOV P1,A
RET
CTR:
DB FEH,FCH,F DH,F9H DB F BH,F3H,F7H,F6H
反转程序:
CC W:DEC
R0
CJNE R0,#0FFH,F AN MOV
R0,#08H F AN:
MOV A,R0MOV DPTR,#CTR MOVC A,@A +DPTR MOV P1,A
RET
采用单片机实现脉冲分配,虽然步进电机的驱动系统简单,但是在运行过程中,单片机要不停地产生控制脉冲,必然会占用大量的CP U 时间,就不能很好地完成其他的功能.因此,有必要增加外围芯片来替
代单片机以实现脉冲分配,从而使单片机的CP U 时间得到更好的利用.1.2 芯片L297和L298N 实现脉冲分配控制电机
由芯片L297和L298N 共同实现脉冲分配来控制电机的驱动系统如图2所示,AT89C51单片机的P1口提供时钟信号、正反转信号、半拍或全拍信号和复位信号.脉冲分配芯片L297实现步进电机转动所要求的脉冲分配信号,与双H 桥式驱动芯片L298共同组合成完整的步进电机固定斩波频率的P WM 恒流斩波
驱动器[6]
.
图2 芯片L297和L298N 实现脉冲分配控制电机的驱动系统
此驱动系统由于增加了脉冲分配器L297芯片,分担了单片机的部分工作,使单片机只需要提供步进
脉冲,就可以进行速度控制和转向控制,并能充分发挥各器件的优越性能,从而实现对步进电机更加灵活均衡的控制.
当驱动系统实现控制四相步进电机的八拍工作方式时,可以由AT89C51的P1.2口向L297的19引脚发送高电平,L297内部的译码电路会自动产生半步工作方式时序(格雷码时序),该模式下两个禁止信号也会自动产生相应的高低电平,其时序波形如图3所示
.
图3 四相步进电动机半步八拍时序图
5
4
64
许昌学院学报2007年9月
2 步进电动机的速度控制
步进电动机的速度控制是由单片机产生的脉冲频率来实现的.对于图1所示的驱动方案可以采用调整两个控制字发出的时间间隔来实现调速;对于图2所示的方案可以调整单片机向L297发出的时钟脉冲来实现调速.根据此原理,可以采用延时和定时两种方法改变相应脉冲方波的频率,以达到调速的目的.
延时方法是通过软件来实现的,改变延时时间长度就可以改变输出的方波频率.但这种方法占用CP U的时间长,同时不能在运行时处理其他工作,因此只适合较简单的控制过程.
定时方法是利用单片机中的定时器进行工作的.定时器从装载的初值开始对系统及其周期进行加计数;当定时器溢出时,定时器产生中断,系统转去执行定时中断子程序.在中断子程序中改变P1.0电平状态,从而得到一个设定速度值的方波频率的输出.采用此方法,CP U只在改变脉冲状态时进行参与,就可以明显提高系统的响应时间.
3 总结
本文对四相步进电动机的驱动系统进行了设计,论述了实现脉冲分配的两种方案.当完全采用单片机AT89C51直接驱动步进电动机时,系统的脉冲分配控制将占用较多的CP U时间,就减小了系统的响应速度.若采用芯片L297和L298N组成驱动系统,来分担单片机脉冲分配的任务,不仅提高了系统的响应速度,而且可以更好地设计、扩展单片机的其他应用功能;同时采用定时的方法还可实现电机的调速,使整个驱动系统具有更加良好的性能.
参考文献:
[1] 唐 介.电机与拖动[M].北京:高等教育出版社,2003.
[2] 张建民.机电一体化系统设计[M].北京:高等教育出版社,2004.
[3] 王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2003.
[4] 赵 克,高晗璎.混合式步进电动机正弦波微步驱动设计[J].微特电机,2006(2):25-27.
[5] 李忠科,赵 静.通用步进电动机升降速控制器设计[J].微特电机,2006(1):34-35.
[6] 房玉明,杭柏林.基于单片机的步进电机开环控制系统[J].电机与控制应用,2006,33(4):61-64.
Dri ve Syste m of Step2motor based on Si n gle Chi p
L I Q iang,GENG Yao2feng
(School of E lectrical and Infor m ation Engineering,X uchang U niversity,X uchang46100,China)
Abstract:D rive syste m of step2mot or is designed by using single chi p A t m el89C51.I n this syste m mot or is directly contr olled by single chi p which distribute pulse.Si m p le as it is,it occup ies much ti m e of CP U.The re2 s ponse s peed of the syste m is increased,after the chi p L297which distributes pulse is added t o the syste m.
Key words:single chi p;step2mot or;drive syste m
责任编辑:卫世乾。