声音、火焰传感器(模拟输入口的使用)
火焰传感器原理

火焰传感器原理
火焰传感器是一种能够检测和测量火焰存在的设备。
它的工作原理基于火焰的辐射热量和光辐射特性。
火焰传感器通常采用红外线探测技术。
它包括一个红外线发射器和一个红外线接收器。
发射器会发射一束红外线,而接收器则会接收红外线的反射或透过率。
当火焰出现在传感器的检测范围内时,火焰会产生大量的红外线辐射热量和可见光辐射。
这些辐射会被传感器接收器接收到。
接收器会将接收到的信号进行处理和判别。
正常情况下,没有火焰存在时,接收器接收到的红外线信号强度会非常弱。
而当火焰出现时,红外线信号的强度会急剧增加。
火焰传感器会通过设定的阈值来判断火焰是否存在。
一旦火焰辐射的红外线信号强度超过阈值,传感器就会触发报警或其他预设的应对措施。
需要注意的是,火焰传感器只能检测到火焰的存在,而不能判断火焰的大小或温度。
此外,传感器对于其他光源或热源的辐射并不敏感,因此不会误报警。
总的来说,火焰传感器通过红外线探测技术来检测火焰的存在。
它的工作原理基于火焰的辐射热量和光辐射特性,可以在火灾等危险情况下及时发出警报,保障人们的安全。
火焰传感器参数及功能
火焰传感器是一种能够检测火焰或火源的仪器。
它的主要参数和功能如下:
1. 灵敏度:火焰传感器的灵敏度可以调节,根据不同的应用场合可以设置不同的灵敏度。
2. 响应时间:火焰传感器的响应时间很短,一般在几毫秒之内。
3. 工作温度范围:由于火焰传感器需要在高温环境下工作,因此其工作温度范围比较广,一般在-20℃到+70℃之间。
4. 信号输出:火焰传感器一般会通过电信号或者光信号的方式输出检测结果,可以与其他设备进行联动。
5. 自检功能:火焰传感器具有自检功能,能够自动检测自身的工作状态,保证其稳定可靠地工作。
6. 抗干扰能力:火焰传感器还具有抗干扰能力,能够在电磁干扰等环境下正常工作。
7. 安装方式:火焰传感器可以采用壁挂、吸顶或者管道安装等方式,方便实际应用。
总之,火焰传感器是一种非常重要的安全设备,可以有效地检测火源,为保障人们的生命财产安全提供了重要的保障。
物理实验中常用的声音传感器及其使用方法

物理实验中常用的声音传感器及其使用方法导语:声音传感器是一种常见的物理实验设备,在科学研究和实验教学中发挥着重要的作用。
本文将介绍几种常见的声音传感器及其使用方法,希望能够为读者提供一些参考和帮助。
一、声波传感器声波传感器是一种能够检测和测量环境中声音强度的传感器。
它通常由麦克风和信号处理电路组成。
在物理实验中,声波传感器广泛应用于声学研究、声音分析和振动研究等领域。
使用声波传感器进行实验时,需要将其连接到数据采集设备,并通过合适的软件进行数据处理和分析。
二、麦克风麦克风是声音传感器中最常见的一种。
它能够将环境中的声音转化为电信号,并输出给其他设备进行进一步处理。
在物理实验中,麦克风通常被用来测量声音的频率、振幅和时域特性等。
使用麦克风进行实验时,需要注意保持实验环境安静,避免噪音对实验结果的影响。
三、压电传感器压电传感器利用压电效应将声音的机械能转化为电能。
在物理实验中,压电传感器常用于测量声音的强度和压力。
使用压电传感器进行实验时,需要将其固定在被测物体表面,以确保传感器能够准确感知声音的传播和变化。
四、光电传感器光电传感器是一种通过光电效应进行声音传感的器件。
它利用光敏材料对入射光的反应产生电信号,从而实现声音的捕捉和测量。
在物理实验中,光电传感器常用于测量声音的频率和强度,并可与其他仪器进行联动使用。
使用光电传感器进行实验时,需要注意保持传感器和光源的稳定,并进行适当的校准。
五、声频分析仪声频分析仪是一种专门用于分析声音频率和振幅的设备。
它通常由声音传感器、信号处理电路和显示屏等组成。
在物理实验中,声频分析仪广泛应用于噪音控制、声学研究和声音检测等领域。
使用声频分析仪进行实验时,需要将传感器正确连接,并进行相应的设置和调整。
六、使用声音传感器的注意事项1. 实验环境的选择:选择相对安静的实验环境,减少噪音对实验结果的干扰。
2. 传感器的放置:将传感器放置在合适的位置,保证其能够准确感知声音的传播和变化。
火焰传感器工作原理

火焰传感器工作原理火焰传感器是一种用于检测火焰存在的传感器装置,广泛应用于火灾预警、工业安全监测以及燃气领域。
它可以通过感知火焰的特定光谱特征来进行工作,实现对火灾的早期发现和预警。
在本文中,我们将详细介绍火焰传感器的工作原理以及其在实际应用中的相关技术。
一、工作原理火焰传感器的工作原理基于火焰产生的特殊光谱。
当火焰燃烧时,燃烧产生的光由多种波长组成。
其中,紫外线(UV)和红外线(IR)是最常用于火焰检测的光谱范围。
火焰传感器通常包含一个光电二极管(Photodiode)或者其他带有光敏元件的感光器件。
感光器件能够感知到光强度,并将信号转化为电信号。
当火焰出现在传感器的感应范围内时,光强度会显著增加,并且会以特定的光谱特征进行变化。
通过对感光器件输出信号的检测和分析,我们可以判断火焰的存在与否。
二、探测方法基于火焰产生的特定光谱,火焰传感器可以采用不同的探测方法来实现火焰的检测和判断。
1. 紫外线探测法(UV探测法)紫外线探测法利用紫外线在火焰燃烧时产生的特殊光谱。
传感器通过感光器件感知紫外线强度的变化,一旦火焰出现,紫外线的强度将显著增加,从而触发传感器的报警信号。
这种方法对其他光源的干扰较小,但其检测距离相对较短。
2. 红外线探测法(IR探测法)红外线探测法利用红外线在火焰燃烧时产生的特殊光谱。
传感器通过感光器件感知红外线强度的变化,当火焰出现时,红外线的强度也会显著增加。
通过对红外线强度进行检测和分析,可以判断出火焰的存在与否。
红外线探测法对于长距离的火焰检测有良好的效果,并且对于抑制背景光的干扰也较强。
三、应用领域火焰传感器广泛应用于多个领域,具有重要的实际意义。
1. 火灾预警系统火焰传感器是火灾预警系统的关键组成部分之一。
通过安装火焰传感器,可以实现对火灾的早期发现和报警,提高火灾抢救和逃生的安全性能。
2. 工业安全监测在许多工业环境中,如化工厂、石油精炼厂等,火焰传感器被广泛应用于监测燃烧装置的运行状态。
五路火焰传感器用户说明手册

Flame-M 五路火焰探测模块用户说明手册产品特点:●采用五路火焰传感器设计,探测范围广(大于120°)●能够输出数字信号(高低电平),易于使用●能够输出模拟信号(电压信号),可以更加精确的测量信号,适合高精度的场合●五路输出全部具有状态指示灯,使得不论在调试或是在实际运用中都带来极大的方便●数字输出探测距离可调,模拟输出灵敏度可调,设计更加灵活●采用1%电阻设计,信号输出更加精确,适合需求高精度测量的场合●板载3个M3安装孔,方便安装● 3.3V-9V供电,可兼容大部分单片机系统●贴片器件全部采用SMT工艺全自动焊接,军工品质值得信赖模块原理本产品能够探测火焰发出的波段范围分别为700—1100 nm的短波近红外线(SW-NIR),通过电信号(电压信号)进行输出。
•模块接口说明信号输出口(从上到下):A1(第一个输出口既是,模块上标注为A2了): 第一路火焰传感器模拟信号输出口,随着火焰强度的增加输出电压升高D1(第一个输出口既是,模块上标注为D2了): 第一路火焰传感器数字信号输出口,高电平表示有火焰(指示灯亮),低电平标识无火焰(指示灯灭)A2: 第二路火焰传感器模拟信号输出口,随着火焰强度的增加输出电压升高D2: 第二路火焰传感器数字信号输出口,高电平表示有火焰(指示灯亮),低电平标识无火焰(指示灯灭)A3: 第三路火焰传感器模拟信号输出口,随着火焰强度的增加输出电压升高D3: 第三路火焰传感器数字信号输出口,高电平表示有火焰(指示灯亮),低电平标识无火焰(指示灯灭)A4: 第四路火焰传感器模拟信号输出口,随着火焰强度的增加输出电压升高D4: 第四路火焰传感器数字信号输出口,高电平表示有火焰(指示灯亮),低电平标识无火焰(指示灯灭)A5: 第五路火焰传感器模拟信号输出口,随着火焰强度的增加输出电压升高D5: 第五路火焰传感器数字信号输出口,高电平表示有火焰(指示灯亮),低电平标识无火焰(指示灯灭)电源接口(横排相连,随便接一个即可):VCC:模块电源正极输入口,输入范围3.3V-9V(相对于GND)GND:模块电源负极输入口距离调节旋钮:对于模拟输出:逆时针旋转(想标识增高的地方旋转),灵敏度增加,既只需要很小的输入就能得到很高的电压输出对于数字输出:逆时针旋转(想标识增高的地方旋转),探测增加,很远的距离就可以得到数字输出距离调节旋钮注意事项:5路共用一个调节旋钮技术参数探测波长:700—1100 nm探测距离:大于1.5m供电电压:3V-9V注意事项阳光对其有一定影响,使用时避开阳光使用,为减少干扰,可以在传感器端加热缩管。
火焰传感器的原理
火焰传感器的原理
火焰传感器是一种新型的火焰检测设备,它利用光电转换技术将火焰中的紫外光转化为电信号,从而达到检测火焰的目的。
这种设备一般由四部分组成:光敏元件、光电转换元件、信号放大电路和电源。
传感器的输出信号可通过改变输出电压来实现,可满足不同场合的需要。
在很多场合下,火焰是一个比较重要的参数,其变化规律直接关系到火灾事故的发生。
比如当发生油、煤、气等可燃气体泄漏时,一旦被点燃就会迅速燃烧,并产生高温高压,如果不及时发现、控制或排除,就会造成重大的火灾事故。
由于火焰传感器能检测到火焰信号,所以在化工、石油、燃气等行业中使用比较普遍。
火焰传感器的基本原理是将一根导体(如导线)通过电流从传感器输出端流入另一端并使电流改变。
通过这一过程可以获得火焰中紫外光强度变化的信息。
当有火焰存在时,电流会产生相应的变化,并通过放大电路放大这种变化以得到被测物体火焰中紫外光强度变化的信息。
根据火焰和紫外光之间的关系,可以将火焰分为四种类型:
—— 1 —1 —。
火焰传感器的使用流程

火焰传感器的使用流程1. 概述火焰传感器是一种用于检测火焰的设备,可以广泛应用于火灾预警、工业生产等领域。
本文将介绍火焰传感器的使用流程,包括安装、连接和测试等步骤,帮助用户正确使用火焰传感器。
2. 安装2.1 确定安装位置在安装火焰传感器之前,需要选择一个合适的安装位置。
通常情况下,应该选择离潜在火源较近、易于观察的位置进行安装。
2.2 固定传感器使用螺丝将传感器固定在所选的安装位置上。
确保传感器安装牢固,不容易被误移或摇动。
3. 连接3.1 连接电源将火焰传感器的电源线连接到适配器或电源控制器上。
确保电源接线正确,以防止短路或电源异常。
3.2 连接信号线将火焰传感器的信号线连接到控制器或数据采集设备上。
确保信号线连接牢固,以免因连接不良造成数据传输错误。
3.3 接地处理根据需要,对火焰传感器进行接地处理,以确保传感器的正常运行和安全性。
4. 测试4.1 确保供电正常在进行传感器测试之前,需要确保传感器已经正常供电。
检查电源线是否连接正确,电源是否正常。
4.2 确认信号接收使用控制器或数据采集设备确认是否能够正常接收到火焰传感器发送的信号。
可以使用示波器或软件进行检测。
4.3 模拟火焰信号可以使用火焰模拟器或者其他方式产生火焰信号,测试火焰传感器对火焰的检测能力。
确保传感器能够准确地检测到火焰并发出相应的信号。
5. 使用注意事项5.1 防尘防水保持火焰传感器干燥、清洁,避免灰尘和水分进入传感器内部,以免影响传感器的正常工作。
5.2 避免干扰保持火焰传感器远离其他可能产生干扰的设备,如高频电磁辐射设备。
可采取屏蔽或隔离措施,以保证传感器的稳定性和准确性。
5.3 定期检测定期检测火焰传感器的工作状态。
可以通过模拟火焰信号或者其他方式进行测试,确保传感器能够正常工作。
6. 故障排除6.1 无信号输出如果火焰传感器无信号输出,可以检查供电是否正常、信号线是否连接好等。
若仍不能解决问题,可能需要更换传感器。
火焰传感器的工作原理
火焰传感器的工作原理火焰传感器是一种用于检测火焰的设备,其工作原理主要基于火焰的辐射特性。
火焰传感器通常被广泛应用于工业生产、家庭安全等领域,其作用是及时发现火灾隐患,从而保障人们的生命和财产安全。
火焰传感器的工作原理可以简单概括为,利用火焰的光谱特性进行检测。
火焰在燃烧时会产生特定的光谱,其中包括可见光和红外光。
火焰传感器通过检测火焰产生的光谱,可以判断是否存在火焰,并将信号输出给控制系统,从而实现火灾报警或自动灭火等功能。
具体来说,火焰传感器内部通常包含光电探测器和信号处理电路。
光电探测器可以感知火焰产生的光谱,并将其转化为电信号;而信号处理电路则负责对电信号进行放大、滤波和处理,最终输出给控制系统进行判断和处理。
在火焰传感器的工作过程中,需要注意一些关键因素。
首先是火焰的辐射强度,不同类型的火焰会产生不同的光谱特性,因此火焰传感器需要能够准确识别不同类型的火焰。
其次是背景光的干扰,火焰传感器需要具备一定的抗干扰能力,以免受到外界光源的影响而误判。
此外,温度、湿度等环境因素也会对火焰传感器的工作产生影响,因此在使用过程中需要进行合理的环境控制。
除了基本的工作原理外,火焰传感器在实际应用中还需要考虑一些其他因素。
例如,对于不同场景下的火焰检测需求,可以选择不同类型的火焰传感器,如紫外火焰传感器、红外火焰传感器等。
此外,火焰传感器的安装位置、灵敏度调节、报警方式等也需要根据实际情况进行合理设置。
总的来说,火焰传感器作为一种重要的安全设备,在工业生产和日常生活中发挥着重要作用。
通过对火焰的光谱特性进行检测,火焰传感器可以及时发现火灾隐患,从而保障人们的生命和财产安全。
在今后的发展中,火焰传感器将继续得到广泛应用,并不断提升其检测精度和可靠性,为人们的生活和工作带来更多的便利和安全保障。
火焰传感器

紫外火焰传感器 紫外火焰传感器可以用来探测火源发出的400纳米以下热辐射。原理介绍:通过下紫外光,可根据实际设定探测角度,紫外透射可见吸收玻璃(滤光片)能够探测到波长在400纳米范围以其中红外光波长在350纳米附近时,其灵敏度达到最大。紫外火焰探头将外界红外光的强弱变化转化为电流的变化,通过A/D转换器反映为0~255范围内数值的变化。外界紫外光越强,数值越小;紫外光越弱,数值越大。[1] 工作原理 火焰探测器(flame detector)是探测在物质燃烧时,产生烟雾和放出热量的同时,也产生可见的或大气中没有的不可见的光辐射。 火焰燃烧辐射光波段火焰探测器又称感光式火灾探测器,它是用于响应火灾的光特性,即探测火焰燃烧的光照强度和火焰的闪烁频率的一种火灾探测器。 根据火焰的光特性,目前使用的火焰探测器有三种:一种是对火焰中波长较短的紫外光辐射敏感的紫外探测器;另一种是对火焰中波长较长的红外光辐射敏感的红外探测器;第三种是同时探测火焰中波长较短的紫外线和波长较长的红外线的紫外/红外混合探测器。 具体根据探测波段可分为:单紫外、单红外、双红外、三重红外、红外紫外、附加视频等火焰探测器; 根据防爆类型可分为:隔爆型、本安型; 传感器类型: 对于火焰燃烧中产生的0.185~0.260μm波长的紫外线,可采用一种固态物质作为敏感元件,如碳化硅或硝酸铝,也可使用一种充气管作为敏感元件,如盖革一弥勒管。 对于火焰中产生的2.5~3μm波长的红外线,可采用硫化铝材料的传感器,对于火焰产生的4.4~4.6μm波长的红外线可采用硒化铅材料或钽酸铝材料的传感器。根据不同燃料燃烧发射的光谱可选择不同的传感器,三重红外(IR3)应用较广。 优缺点: 光学火焰探测器实际火焰探测器外观图
优点:响应速度快,探测间隔远,环境适应性好 缺点:价格高 其他类型 优点:可靠性高、本钱低 缺点:反应速度慢、环境适应性差(室内、风、烟、雾、热源等) 应用在低端、民用、建筑、室内 应用场合 高端,石油和自然气的勘探、生产、储存与卸料, 海上钻井---固定平台、浮动生产贮存于装卸, 陆地钻井---精炼厂、自然气重装站、管道, 石化产品---生产、储存和运输设施,油库,化学品, 易燃材料储存仓库,汽车---制造、油漆喷雾房, 飞机---产业和军事,炸药和军需品; 汽车---喷漆房 医药业 废品焚烧 粉房等高风险产业染料的生产、储存、运输等。 用12个火焰传感器分30度间隔一个,可以探测360度范围内的火焰情况。
火焰传感器 原理
火焰传感器原理火焰传感器是一种用来检测火焰的电子设备。
它被广泛用于各种场合,如家庭防火、工业安全和自动火警报警系统等。
火焰传感器的原理是基于火焰燃烧产生的光和热。
当火焰燃烧时,它会产生可见光和红外光。
火焰传感器可以通过探测光的强度和频率来确定是否存在火焰。
火焰传感器的核心部件是火焰光敏元件,通常是一种光敏电阻或光敏二极管。
这些敏感元件可以感知到火焰产生的光信号。
当光信号达到一定的阈值时,传感器将产生一个输出信号,用于触发警报或其他相关设备的操作。
火焰传感器的工作原理可以分为三个阶段:发光、传导和探测。
发光阶段是指火焰燃烧时产生的可见光和红外光。
这些光线会被火焰传感器的光敏元件吸收,并产生相应的电信号。
传导阶段是指电信号从光敏元件中传导到传感器的电路中。
这些电信号经过放大和过滤后,将产生一个与火焰光信号强度成正比的电压信号。
探测阶段是指根据电压信号的变化来确定是否存在火焰。
通常,传感器会设置一个阈值电压,当电压超过阈值时,传感器将产生一个输出信号。
这个输出信号可以用于触发警报或其他相关设备。
火焰传感器的灵敏度可以通过调整阈值电压来进行调整。
一般来说,灵敏度的调整与火焰传感器的设计有关,设计者需要根据具体的应用场景和需求来选择合适的传感器。
火焰传感器还可以通过与其他传感器的组合使用来提高其性能。
例如,可以将火焰传感器与温度传感器结合使用,以提高火灾检测的准确度。
总之,火焰传感器是一种基于火焰产生的光和热来检测火灾的电子设备。
它通过发光、传导和探测三个阶段,实现对火焰的检测和警报。
火焰传感器的灵敏度可以通过调整阈值电压来进行调整,同时还可以与其他传感器组合使用来提高其性能。
火焰传感器在防火和安全领域发挥着重要的作用,对于保护人们的生命和财产具有重要意义。
灭火机器人的设计中需要的传感器使用方法

灭火机器人的设计中需要的传感器使用方法在灭火机器人中主要使用了三类传感器,火焰传感器是用来探测火焰的;红外传感器用来测量小车到墙壁的距离,用来定位;灰度传感器主要是用来识别地面的白线。
一、火焰传感器。
远红外火焰探头将外界红外光的变化转化为电流的变化,通过 A/D转换器反映为 0~1023 范围内的数值。
外界红外光越强,数值越小。
因此越靠近热源,机器人显示读数越小。
根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。
此外,远红外火焰探头探测角度为60°。
火焰传感器的原理图如下:使用中在火焰传感器上串联了一个电位器,这样便可以调整传感器的灵敏度。
在不同光线环境下,直接调整电位器,即可减少外界光对传感器的影响。
在以往的比赛中,一般都在机器人前方加装三个以上的火焰传感器来探测火焰,这样机器人到达房间门口即可感应到火焰是否存在,但是这种方案容易受相机闪光灯、阳光等影响,所以本系统中未采用。
本系统中采用的是单传感器加舵机的方案。
取一不透光黑色胶卷筒,在其尾部钻孔,将火焰传感器装入其中,再将胶卷筒固定在舵机舵盘上。
这样,火焰传感器就能随舵机转动,在转动的过程中进行A/D采样,实验证明抗干扰能力很好。
并且小车距离火焰2.6cm以外即可“看”到底部距地面15cm~20cm高度不定的火焰,满足比赛要求。
二、红外测距传感器。
红外测距传感器使用的是SHARP公司的GP2D12集成高精度传感器,测量有效距离为10cm~80cm,对应输出电压为2.5V~0V。
传感器外形及距离-电压曲线图如下:本系统中共使用了三个红外测距传感器(以下简称PSD),一个装于机器人正前方,另外两个分别装于机器人两侧,与前方PSD成90度。
主要用这三个PSD 来测量前方、左方、右方离开墙壁的距离。
但是在使用该传感器的过程中有很多不当的地方在此作一些说明。
传感器安装错误。
在组装机器人时,为了安装方便将传感器安装成如图4-4所示,这样安装就使得机器人在沿墙走的过程中如果遇到内角拐弯时就必需不断配合检测前方传感器的值才能完成拐弯动作如图4-6,增加了程序的复杂性,降低了系统的可靠性。
火焰传感器工作原理
火焰传感器工作原理
火焰传感器是一种能够检测到火焰的传感器,可以用来探测周围是否存在火焰,以及火焰的大小、位置等信息。
火焰传感器通常由一个传感器头,一个探测头和一个控制单元组成。
传感器头是火焰传感器的核心部件,它由一个发射头和一个接收头组成。
发射头通过发射可见光或红外线来探测火焰,并将探测到的火焰反射回接收头。
接收头将反射回来的火焰信号转换成电信号,然后将信号传递给控制单元。
控制单元是火焰传感器的智能控制部件,它负责处理发射头和接收头所检测到的信号,并通过系统自身的算法,根据反射回来的火焰信号的大小、位置等信息,来判断是否存在火焰以及火焰的大小等。
一旦检测到火焰,控制单元将向外部设备发出警报信号,以便及时采取措施。
火焰传感器普遍用于检测消防安全,也可以用于监测工业现场,用来检测火灾隐患。
火焰传感器具有自动化程度高、反应速度快、精度高、安装容易等优点,能够快速、准确地检测到火焰,从而及时采取措施防止火灾发生。
Arduino——火焰传感器简介
火焰传感器简介:
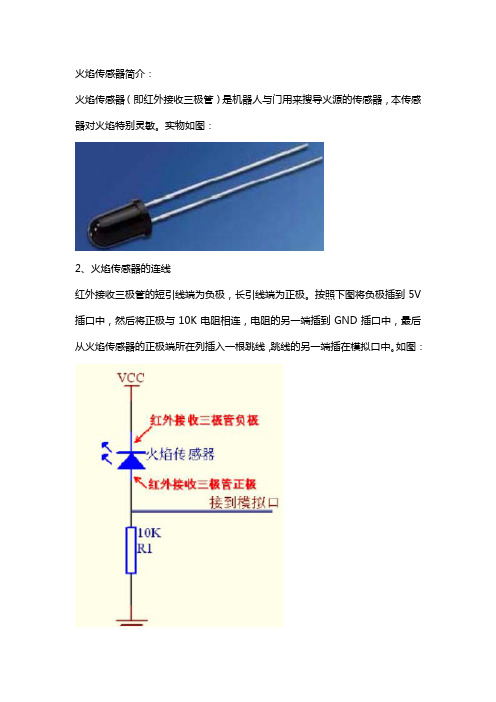
火焰传感器(即红外接收三极管)是机器人与门用来搜导火源的传感器,本传感器对火焰特别灵敏。
实物如图:
2、火焰传感器的连线
红外接收三极管的短引线端为负极,长引线端为正极。
按照下图将负极插到5V 插口中,然后将正极与10K电阻相连,电阻的另一端插到GND插口中,最后从火焰传感器的正极端所在列插入一根跳线,跳线的另一端插在模拟口中。
如图:
3、工作原理
火焰传感器利用红外线对火焰非常敏感的特点,使用特制的红外线接叐管来检测火焰,然后把火焰的亮度转化为高低发化的电平信号,输入到中央处理器,中央处理器根据信号的发化做出相应的程序处理。
如何使用火焰传感器进行气体检测
如何使用火焰传感器进行气体检测随着工业化进程的加速,气体泄漏和火灾事故的发生频率也在不断增加。
为了保障人们的生命安全和财产安全,火焰传感器逐渐成为一种必备的安全设备。
火焰传感器是一种能够检测火焰的设备,它通过感知火焰的光谱特征来判断是否发生火灾。
然而,火焰传感器不仅仅可以用于火灾检测,还可以用于气体检测。
本文将介绍如何使用火焰传感器进行气体检测。
首先,我们需要了解火焰传感器的工作原理。
火焰传感器的核心部件是光敏电阻器,它能够感应到火焰产生的光线。
当火焰燃烧时,会产生一种特定的光谱,这种光谱可以被光敏电阻器所感知。
当光敏电阻器感知到火焰时,会产生一个电信号,通过对这个电信号的处理,我们就可以得知是否发生了火灾。
然而,火焰传感器并不仅限于检测火焰。
在一些特定的情况下,火焰传感器还可以用于气体检测。
当一些易燃气体泄漏时,它们也会燃烧并产生火焰。
这时,火焰传感器可以通过感知到火焰来判断是否有气体泄漏。
因为不同的气体燃烧时产生的光谱特征也不同,所以通过对火焰光谱的分析,我们可以判断出泄漏的气体种类。
在使用火焰传感器进行气体检测时,我们需要注意一些问题。
首先,火焰传感器对于火焰的感应范围是有限的,所以我们需要将传感器放置在可能发生泄漏的区域附近。
其次,不同的气体燃烧时产生的光谱特征不同,所以我们需要事先对各种气体的光谱特征进行研究,并将这些特征输入到火焰传感器的算法中。
另外,火焰传感器对于火焰的感应灵敏度也是可以调节的,我们可以根据需要来调整传感器的灵敏度。
除了使用火焰传感器进行气体检测外,我们还可以结合其他传感器来进行更全面的安全监测。
例如,我们可以结合温度传感器来检测燃烧过程中的温度变化,结合烟雾传感器来检测燃烧过程中产生的烟雾,从而更加准确地判断是否发生了火灾。
综上所述,火焰传感器是一种非常重要的安全设备,它不仅可以用于火灾检测,还可以用于气体检测。
通过感知火焰的光谱特征,火焰传感器可以判断是否发生火灾或气体泄漏。
火焰检测传感器模块使用说明
诚信、热情、专业
龙戈电子-火焰检测传感器使用说明书
P0 = cmd; _nop_(); _nop_(); _nop_(); _nop_(); LCD_EP = 1; _nop_(); _nop_(); _nop_(); _nop_(); LCD_EP = 0; }
void lcd_pos(BYTE pos) { lcd_wcmd(pos | 0x80); }
龙戈电子:
诚信、热情、专业
龙戈电子-火焰检测传感器使用说明书
break; }
} } void flash() {
for(i=0;i<12;i++) { delay(600); } lcd_wcmd(0x08); for(i=0;i<12;i++) { delay(200); } lcd_wcmd(0x0c);
龙戈电子:
诚信、热情、专业
龙戈电子-火焰检测传感器使用说明书
BYTE code dis2[] = {""}; BYTE code dis3[] = {" TEST...... "}; BYTE code dis5[] = {""}; BYTE code Fire[] = {"Fire "}; BYTE code Safe[] = {"Safe "};
/********************************************************************
说明:1、 当着火时,传感器输出低电平 1602 液晶显示 Fire 蜂鸣器响
2、 传感器常态时输出高电平
1602 液晶显示 Safe
火焰传感器用户手册(电压输出型)
模拟电压输出火焰传感器使用手册非常感謝您選用碩鋒科技产品,为了您正確使用,請在使用前仔細閱讀本說明書,並妥善保存以供今後參考前言歡迎使用碩鋒科技產品,希望此說明書在您使用過程中給您帶來方便,我們在編寫本傳感器手冊時,已盡力確保手冊中的內容沒有缺點,如果您在手冊中發現有任何不清楚、錯誤或過於冗長的地方,請及時與代理商或公司總部聯繫。
注意①在使用前,請認真閱讀每項內容。
②禁止在任何未經許可的情況下,傳播本手冊中的內容。
③本手冊僅為提供有關信息,手冊中所有內容會在不經通知的情況下修改。
④除非手冊中已經說明,否則,請不要將本產品加以改造或者修正,如果未經允許而私自加以改造或者修正,以導致本產品損壞,本公司將採取有償服務。
- 2 -主要研究方向:◆高精度倾角传感器◆数字罗盘、数字指南针◆无线数字传感系统◆仿生感知机器人与控制研究◆履带研究版机器人机械动力结构设计◆轮式教学机器人研究- 3 -- 4 - 一、功能介绍:远红外传感器又称之为火焰传感器,主要用于检测火源的位置和大致判断距离的远近,例如在灭火比赛中判断火源的远近等。
序号 项目 技术参数 备注 1 VCC 电源正 2 GND 电源地3 信号线 模拟电压输出4 尺寸 不含探头和插针5 工作电压 DC 3-5.5V6 灵敏度调节 有7 输出方式 模拟电压输出 需要经过AD 转换接到单片机8 功耗小于20mA二、特点:1、模拟电压输出。
2、模块带安装孔,方便固定安装;3、用于检测波长在760纳米~1100纳米范围内的远红外热源;4、探测角度达60度;5、传感器距离火源越近,输出电压越小。
- 5 -例如机器人上可以采用了3只远红外传感器(700nm-1000 nm )构成红外传感系统,主要用来检测前方、左前方和右前方的热源,检测距离范围为0~1m 。
用户可以通过调节电位器来调节远红外传感器灵敏度。
远红外传感器将外界远红外光的变化转化为电流的变化,在电阻上产生电压,我们可以通过A/D 转换器反映为0~1023范围内的数值。
火焰传感器的应用电路原理
火焰传感器的应用电路原理火焰传感器简介火焰传感器是一种用于检测火焰存在的传感器,广泛应用于安防系统、火警报警系统等领域。
它可以通过检测火焰的光谱特征来判断是否存在火焰,并将结果输出给控制器。
应用电路原理火焰传感器的应用电路原理主要由火焰传感器、运放、比较器和触发器等组成。
下面将分别介绍各个组成部分的原理和作用。
火焰传感器火焰传感器是整个电路的核心部分,它能够检测到火焰的光信号并将其转换为电信号。
火焰传感器通常由红外光源和红外光敏元件组成。
当有火焰存在时,火焰会发出较强的红外光信号,红外光敏元件则会将其转换成电信号,并输出给后续的电路。
运放在火焰传感器应用电路中,运放扮演着信号放大的角色。
由于火焰传感器输出的电信号较弱,需要通过运放进行放大,以便后续电路能够正常工作。
运放具有高输入阻抗和低输出阻抗的特性,能够提高信号的传输和放大能力。
比较器比较器是一个电子元件,用于比较两个信号的大小,并输出相应的结果。
在火焰传感器应用电路中,比较器的作用是判断火焰信号的强弱。
当火焰信号超过设定的阈值时,比较器会输出高电平信号;反之,则输出低电平信号。
这一步是为了对火焰的存在与否进行判断。
触发器触发器是一种电路元件,用于接收比较器的输出信号并进行处理。
在火焰传感器应用电路中,触发器的作用是接收比较器输出的高电平信号,并触发相应的处理程序。
例如,触发器可以通过控制报警系统的开关,使其响应火焰信号并进行相应的警报处理。
电路工作原理流程下面是火焰传感器应用电路的工作原理流程,用列点的方式进行简述:•火焰传感器检测到火焰存在,将红外光信号转换为电信号并输出;•运放对火焰传感器输出信号进行放大,以增强信号的强度;•比较器接收放大后的信号,并与设定的阈值进行比较;•若火焰信号超过阈值,比较器输出高电平信号,表示火焰存在;•触发器接收比较器的高电平信号,并触发相应的处理程序;•处理程序可以是控制报警系统、熄灭火焰等。
总结火焰传感器的应用电路原理是由火焰传感器、运放、比较器和触发器等组成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MF 传感器声音火焰传感器板,用来检测声音的强度、火焰的亮度;并且板上带有一路 风扇电机驱动口(可单独接驱动电源)。使用时注意各接口插入的对应关系和方向。两头机 器人需要两组。
传感器特性: a. 声音、火焰检测采用模拟输入口(AI); b. 电机驱动控制采用数字输出口(DO)。
三、综合检测 void main() {
while(1) {
printf( "\t%d %d %d %d %d %d %d %d %d %d %d %d %d %d %d %d" ,AI(8),AI(9),AI(10),AI(11),AI(12),AI(13),AI(14),AI(15) ,AI(0),AI(1),AI(2),AI(3),AI(4),AI(5),AI(6),AI(7)); /*前声音、前左火焰、前中火焰、前右火焰、后声音、后右火焰、后中火焰、后左火焰、 前左 PSD、前中 PSD、前右 PSD、后右 PSD、后中 PSD、后左 PSD、(顺时针对应)*/ wait(0.1); } }
DrawLine(oldx,oldy,x,y,1); DrawLine(oldx,oldy_2,x,y_2 ,1); } oldx=x; oldy=y; oldy_2=y_2; x++; } CpyVLCDToLCD();/*将 OffsetBuffer 缓冲区内容复制到屏幕缓冲区上*/ wait(delay); } }
或
双头灭火机器人的前
传感器板上的插口: J1:信号接口 J2:PWR(接电机电池:用一拖三电池线) J3:FAN(接灭火风扇电机) J4:DO(灭火风扇电机控制接口)
MIC声音:AI12 A火焰左:AI13 B火焰中:AI14 C火焰右:AI15 双头灭火机器人的后
转接板上的插口: J1:
信号接口MIC声音:AI8 A火焰左:AI9 B火焰中:AI10 C火焰右:AI11
二、DO口的控制(MF灭火机器人灭火风扇电机控制接口:前风扇用DO0,后风扇用DO1) void main() { while(1) { /*此时以控制线接DO0口用为例*/ DO( 0x1, 1 ); /*DO0口接通*/ wait( 0.500000 ); DO( 0x1, 0 ); /*DO0口接通*/ wait( 0.500000 ); } }
特殊应用范例:由于声音的捕捉仅仅通过数据显示很不直观(声音瞬时强度),所以此时可 以发挥出 MF 机器人的 128*64 点阵屏的巨大优势之一:显示波形。
/*MF 波形显示:模拟双踪示波器***************/ int x,y,ma_1,ma_2,oldx,oldy,oldy_2,y_2; int port_1=8;/*MF 两头灭火中为 8 或 12*/ int port_2=12; int DB=15,DB_2=15;/*增益设定:波形幅度*/ int Line=26,Line_2=52;/*基准线位置设定*/ float delay=0.0;/*用来调整采样率*/ void main() {
J2: 信号接口MIC声音:AI12 A火焰左:AI13 B火焰中:AI14 C火焰右:AI15
编写程序,运行检测结果。 一、某路火焰传感器检测亮度(AI9)
int ma_10=0; void main() {
while(1) {
ma_1 = AI(9); /*此时以传感器接AI9口为例*/ printf( "\tma_10 =%d" ,ma_10); } }
电机控制线
转接板
电机电池 一拖三线
电机控制状态 指示灯接口
电机电池接口
声音传感器
使用范例:将传感器组的各功能插头插入 MF 控制器的对应接口, 注意 DO 接口插入的 方向和外接电源的插入方向。
MIC声音:AI8
信号接口: (模拟输入)
A火焰左:AI9 B火焰中:AI10 C火焰右:AI11
while(1) {
CLRVLCD(0); /*以黑色背景清屏*/ x=5; /*屏上左侧预留一些位置*/ while(x<128) {
ma_1=AI(port_1)/DB; ma_2=AI(port_2)/DB_2 ; y=(Line+32)-ma_1; y_2=(Line_2+32)-ma_ 2; i f((x>5)&&(x<127)) {