全数字式四象限精密光电方位探测器
基于激光导引头的四象限光电探测器检测电路研究

象限探测器 。四象限探测器再配合 自动驾驶仪 等动 力装置 , 以很方便可靠 的完成制导 、 可 跟踪任务。位
作者简 介 : 匡冬权 ( 9 5 )男 , 16 一 , 辽宁沈 阳人 , 高级工 程师 , 工学士 , 研究方 向 : 通用装备检测与除废。 20 2
《 装备制造技术)o2年第 2 ) 1 2 期
薄 弱 的顶装 甲 ; 整个 射击 过程 中 , 在 只需 在最 后 8 用 s 激 光 照射 器 照 射 目标 , 减少 了照 射器 暴 露 的机 会 ; 在 探测 器 组件 ;如 俄罗 斯 红 土地 末 制 导 炮 弹 采用 双 四
有其它照射器协助 的情况下 , 可间接射击 。
收 稿 日期 :0 1 1— 4 2 1- 2 0
导 弹 的 大 脑 ,导 引 头 是制 导 系 统获 取 外 界信 息 的必 的制导体制 ,O 2 世纪 9 年代发生的几起局部战争表 O
明 ,激光半 主动寻的制导武器已成为现代战场的主 打击 效果 。通过对本课题 的研究可 以对半主动激光 战武 器 之一 。 制 导 导 引头 的组 成 原理 有 较 深 入 的 了解 ,并 提 出相
要 途 径 ,它 的性 能 好坏 直 接 影 响 到激 光 制导 武 器 的
应 的改进方案 ,对提高激光制导Байду номын сангаас器的战场生存能 1 课题背景和意义 力和打击能力有重要意义 。 选用激光半 主动制导体制可 以使导 弹的射程更 在激光半主动寻 的制导 中,激光导引头经 常使 远 ( 6 m 以上 )可 以采用 曲射弹道攻击坦克较为 用的有双四元 、 四元 、 达 k , 单 三元和二元等多种形式 象限
动导引攻击 、 成本 相对较低等优点 ; 与激光驾束和及 作用翻 。为改变这一状况 , 国均在努力改进制导武 各 激光指令制导等遥控制导体制相 比,具有发射点与 器的性能并 积极探索新 的制导方法 。激光半主动寻
光电传感器有哪几种分类?
光电传感器有哪几种分类?光电传感器有哪几种?根据光电效应现象的不同将光电效应分为三类:外光电效应、内光电效应及光生伏特效应。
光电器件有光电管、光电倍增管、光敏电阻、光敏二极管、光敏三极管、光电池等。
下面小编介绍下光电传感器分类。
标准类型1)漫反射型:一般型或能量型(-8),聚焦式(-8-H),带背景抑制功能型(-8-H)光电传感器光电传感器,带背景分析功能型(-8-HW)2)反射板型:一般型(-6),带偏振滤波功能型(-54,-55),带透明体检测功能型(-54-G),带前景抑制功能型(-54-V)3)对射型4)槽型5)光纤传感器:塑料光纤型,玻璃光纤型6)色标传感器,颜色传感器,荧光传感器7)光通讯8)激光测距:三角反射原理型,相位差原理型,时间差原理型9)光栅10)防爆/隔爆型安全类型1)安全对射光电2)安全光栅3)安全光幕4)安全控制器门控类型1)雷达传感器:区域检测型雷达传感器雷达传感器2)主动式传感器:单光束型,多光束型,区域检测型3)被动式传感器:区域检测型4)电梯光幕5)通用光电:槽形,对射型等特长①检测距离长如果在对射型中保留10m以上的检测距离等,便能实现其他检测手段(磁性、超声波等)无法远距离检测。
②对检测物体的限制少由于以检测物体引起的遮光和反射为检测原理,所以不象接近传感器等将检测物体限定在金属,它可对玻璃、塑料、木材、液体等几乎所有物体进行检测。
③响应时间短光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间,响应时间非常短。
④分辨率高能通过高级设计技术使投光光束集中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。
也可进行微小物体的检测和高精度的位置检测。
⑤可实现非接触的检测可以无须机械性地接触检测物体实现检测,因此不会对检测物体和传感器造成损伤。
因此,传感器能长期使用。
⑥可实现颜色判别通过检测物体形成的光的反射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。
光电传感器有哪几种分类?
光电传感器有哪几种分类?光电传感器有哪几种?根据光电效应现象的不同将光电效应分为三类:外光电效应、内光电效应及光生伏特效应。
光电器件有光电管、光电倍增管、光敏电阻、光敏二极管、光敏三极管、光电池等。
下面小编介绍下光电传感器分类。
标准类型1)漫反射型:一般型或能量型(-8),聚焦式(-8-H),带背景抑制功能型(-8-H)光电传感器光电传感器,带背景分析功能型(-8-HW)2)反射板型:一般型(-6),带偏振滤波功能型(-54,-55),带透明体检测功能型(-54-G),带前景抑制功能型(-54-V)3)对射型4)槽型5)光纤传感器:塑料光纤型,玻璃光纤型6)色标传感器,颜色传感器,荧光传感器7)光通讯8)激光测距:三角反射原理型,相位差原理型,时间差原理型9)光栅10)防爆/隔爆型安全类型1)安全对射光电2)安全光栅3)安全光幕4)安全控制器门控类型1)雷达传感器:区域检测型雷达传感器雷达传感器2)主动式传感器:单光束型,多光束型,区域检测型3)被动式传感器:区域检测型4)电梯光幕5)通用光电:槽形,对射型等特长①检测距离长如果在对射型中保留10m以上的检测距离等,便能实现其他检测手段(磁性、超声波等)无法远距离检测。
②对检测物体的限制少由于以检测物体引起的遮光和反射为检测原理,所以不象接近传感器等将检测物体限定在金属,它可对玻璃、塑料、木材、液体等几乎所有物体进行检测。
③响应时间短光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间,响应时间非常短。
④分辨率高能通过高级设计技术使投光光束集中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。
也可进行微小物体的检测和高精度的位置检测。
⑤可实现非接触的检测可以无须机械性地接触检测物体实现检测,因此不会对检测物体和传感器造成损伤。
因此,传感器能长期使用。
⑥可实现颜色判别通过检测物体形成的光的反射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。
光电探测器列表

紫外探测器:碳化硅(SiC)材质,响应波段200-400nm。
应用:火焰探测和控制、紫外测量、控制杀菌灯光、医疗灯光的控制等。
————————————————————————————————————————————可见光探测器:硅(Si)材质,响应波段200-1100nm。
有室温、热电制冷两种形式,可以带内置前放,有多种封装形式可选。
主要用在测温、激光测量、激光检测、光通信等领域。
————————————————————————————————————————————红外探测器(1):锗(Ge)材质,响应波段0.8-1.8um,有室温、热电制冷、液氮制冷三种形式,可以带内置前放,有多种封装形式可选。
主要应用在光学仪表、光纤测温、激光二极管、光学通信、温度传感器等————————————————————————————————————————————红外探测器(2):铟钾砷(InGaAs)材质,响应波段0.8-2.6um,波段内可以进行优化。
有室温、热电制冷、液氮制冷三种形式,可以带内置前放,可以配光纤输出,多种封装形式可选。
主要应用在光通信、测温、气体分析、光谱分析、水分分析、激光检测、激光测量、红外制导等领域。
————————————————————————————————————————————红外探测器(3):砷化铟(InAs)材质,响应波段1-3.8um,有室温和热电制冷两种,可以配内置前放,多种封装形式可选。
主要用于激光测量、光谱分析、红外检测、激光检测等领域。
红外探测器(4):锑化铟(InSb)材质,响应波段2-6um,液氮制冷,可以带内置前放,多种封装形式可选。
主要应用在光谱测量、气体分析、激光检测、激光测量、红外制导等领域。
————————————————————————————————————————————红外探测器(5):硫化铅(PbS)材质,响应波段为1-3.5um,有室温和热电制冷两种,可以带内置前放,多种封装形式可选。
四象限光电探测器电路设计方案
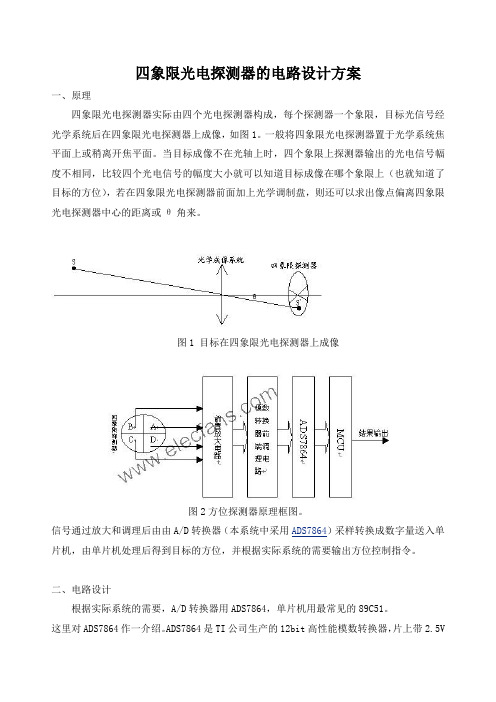
四象限光电探测器的电路设计方案一、原理四象限光电探测器实际由四个光电探测器构成,每个探测器一个象限,目标光信号经光学系统后在四象限光电探测器上成像,如图1。
一般将四象限光电探测器置于光学系统焦平面上或稍离开焦平面。
当目标成像不在光轴上时,四个象限上探测器输出的光电信号幅度不相同,比较四个光电信号的幅度大小就可以知道目标成像在哪个象限上(也就知道了目标的方位),若在四象限光电探测器前面加上光学调制盘,则还可以求出像点偏离四象限光电探测器中心的距离或θ角来。
图1 目标在四象限光电探测器上成像图2方位探测器原理框图。
信号通过放大和调理后由由A/D转换器(本系统中采用ADS7864)采样转换成数字量送入单片机,由单片机处理后得到目标的方位,并根据实际系统的需要输出方位控制指令。
二、电路设计根据实际系统的需要,A/D转换器用ADS7864,单片机用最常见的89C51。
这里对ADS7864作一介绍。
ADS7864是TI公司生产的12bit高性能模数转换器,片上带2.5V基准电压源,可用作ADS7864的参考电压。
每片ADS7864实际由2个转换速率为500ksps 的ADC构成,每个ADC有3个模拟输入通道,每个通道都有采样保持器,2个ADC组成3对模拟输入端,可同时对其中的1~3对输入信号同时采样保持,然后逐个转换。
由于6个通道可以同时采样,很适合用来转换四象限光电探测器的4路光电信号,剩下2个通道作系统扩展用。
*下面主要介绍电路中的信号采样转换和处理部分。
ADS7864前端调理电路模数转换器的前端调理电路缩放和平移要采样的信号,通过调理后的信号适合A/D转换器的模拟输入要求。
图3是ADS7864一个输入通道的前端调理电路,图3 ADS7864前端调理电路ADS7864模拟输入通道的+IN和-IN的最大电压输入范围为-0.3V~+5.3V(ADS7864 +5V 供电)。
图3的电路中使用了2个运放,A1用作跟随器,用来缓冲ADS7864输出的2.5V基准电压源;A2和四个电阻构成了信号调理网络,适当配置R1~R4电阻可以实现对输入信号Vi的缩放和平移以适合ADS7864模拟通道的输入要求。
四象限探测器组件在激光制导技术中的应用
High & New Technology︱12︱2016年10期四象限探测器组件在激光制导技术中的应用邓 松国营长虹机械厂,广西 桂林 541002摘要:激光制导技术在国内外都有很高的发展和应用空间,其普遍运用于导弹、炸弹等精确制导武器的研制,所以在精准上有很高的要求。
而四象限探测组件的特点就是精准度高,并且制作简单,成本也很低,所以在激光制导中有广泛的应用前景和应用市场。
关键词:激光制导;四象限探测组件;精准度高;光电探测组件中图分类号:TN249 文献标识码:B 文章编号:1006-8465(2016)10-0012-011 关于四象限探测组件的基本介绍 1.1 四象限探测组件的基本结构 四象限探测组件是光电探测组件的一种,它之所以叫四象限探测组件,是因为它由四个性能完全相同(物理的理想形态)的光电二极管按照直角坐标要求排列而成,从而形成光电探测组件。
在物理学中,光电二极管是神奇的半导体器件,它虽然也是由一个P-N 结组成,但是不同于普通二极管的整流作用,它可以把光信号转换成电信号。
光电二极管在制作时,会尽量使P-N 结的相对面积大些,这样可以更好地接收入射的光线。
而光的变化可以使光电二极管电流的变化,把光信号转变成电信号,成为光电传感器。
1.2 四象限探测组件的原理和应用 四象限探测组件是利用集成电路光刻技术,将光敏面划分为四个形状和面积完全相同、且相对于光轴位置对称的区域,每个区域相当于一个光电二极管。
利用光学成像的原理,一般会将四象限探测器放置于光学系统焦平面附近,根据四个象限上输出的电信号幅度的大小可以确定目标的成像位置。
当激光照射光学元件时,在四象限光电探测器的光敏面上会产生一个成像光斑。
如果目标在光轴上,其成像光斑相对于光轴是对称的,四个光电二极管接收的激光能量相同;如果目标偏离光轴,四个光电二极管被激光照射的面积不再相同,导致输出的光电流产生差异。
通过一系列的解算,就可以得到很精准的信息。
第五章光电探测方式与探测系统介绍

( A B ) (C D) Vx k A B C D ( A D) ( B C ) Vy k A B C D
探测器被照亮斑的面积大,输出信号也大。这种准直仪可用于各
种建筑施工场合作为测量基准线。
脉冲激光定向
脉冲激光器作光源照射远处军事目标,被照射的目标对光脉冲发生漫反射, 反射回来的光由光电接收系统接收。四象限管放在光学系统后焦面附近,光轴
通过四象限管十字沟道中心。远处目标反射光近似于平行光进入光学系统成像于
物镜的后焦面上,四象限管的位置因略有离焦,于是接收到目标的像为一圆形光 斑。当光学系统光轴对准目标时,圆形光斑中心与四象限管中心重合。四个器件
因受照的光斑面积相同,输出相等的脉冲电压。当目标相对光轴在x、y方向上有
任何偏移时目标像的圆形光斑的位置就在四象限管上相应地有偏移,四个探测器 因受照光斑面积不同而得到不同的光能量,从而输出脉冲电压的幅度也不同。
上图为双元探测的简单原理图。两个相同性能的光电探测器对称地放 在光学系统的像面上组成探测,两探测器与电阻连成电桥方式,如图 (a)所示。图(b)为两个硅光电池与可调电阻连成电桥形式。当平衡时, 输出端两端电压为零,能消除均匀背景的影响。当目标光能量落在某 一器件上时,输出端就有信号电压输出。两个探测器分别受照时,输 出信号极性相反。图(c)为用光敏电阻接成电桥形式外加偏压E,其结 果与(b)一样。这一方案适用于系统接收到的光功率不很弱的场合, 例如做成位置敏感器。
2.双元探测测速器
2.双元探测测速器 测速装置。它可实测车辆行驶速度。尤其是车辆轮胎变形、道 路崎岖和车辆打滑程度不同时车辆的行驶速度。 装置由两个梳形光电池组成,两个相对形成一个较大的光敏面。 光敏面放在光学系统像面上接收地面对阳光的反射光(或另外 加照明灯)。当车辆静止时,两探测器接收到相同的平均光强, 有相同直流输出。这时后面差动放大器有共模抑制作用,因而 没有信号输出。当车辆运动时,如果地面如同一面反射镜,那 么探测器仍得到均匀照明,仍是输出直流。而事实上,地面上 各点的反射率是极不均匀的,突出的点所成的像在探测器上将 形成交变的调制信号。差动放大器对两探测器的输出信号VA、 VB是相加的,形成交流信号。此信号可经过整形、计数电路读 出所对应的车辆的平均速度。也可送入微机算出瞬时速度的变 化,对车辆行驶速度进行研究。
四象限InGaAs APD探测器的研究
四象限InGaAs APD探测器的研究王致远;李发明;刘方楠【摘要】文章中设计的四象限InGaAs雪崩光电二极管(Avalanche Photo Diode,APD)的管芯结构采用正入光式平面型结构,而材料结构采用吸收区、倍增区渐变分离的APD结构,在对响应时间、暗电流和响应度等参数进行计算与分析的基础上,优化了器件结构参数.试验结果表明,其响应时间≤1.5 ns,响应度≥9.5 A/W,暗电流≤40 nA,可靠性设计时使PN结和倍增层均在器件表面以下,可有效抑制器件表面漏电流,提高器件的可靠性.【期刊名称】《光通信研究》【年(卷),期】2007(000)006【总页数】4页(P43-46)【关键词】InGaAs雪崩光电二极管;吸收区倍增区渐变分离-雪崩光电二极管;光谱响应范围;响应度;暗电流【作者】王致远;李发明;刘方楠【作者单位】重庆邮电大学,光电工程学院,重庆,400065;重庆邮电大学,光电工程学院,重庆,400065;重庆邮电大学,光电工程学院,重庆,400065【正文语种】中文【中图分类】TN3InGaAs材料制作的探测器具有直接禁带、室温工作和高纯度的优点,由它制作的光电探测器具有极低的暗电流和噪声。
在过去的十多年中,在光纤通信需求的推动下,InGaAs材料和器件有了很大的发展,现在已经能制备出性能非常优良的探测器。
激光导引头、激光经纬仪等光电跟踪、定位和准直仪器中常用四象限探测器作为光电传感器。
激光制导武器的核心器件便是激光导引头,位于导引头最前端的象限光电探测器是捕获目标、判断目标位置、分析目标状态的第一信息的关键部分[1]。
开发In-GaAs四象限探测器已成为激光制导、激光瞄准、探索和跟踪等装备的迫切需求,也是民用大气检测、土壤水分和碳化物等监控所需象限探测器的发展趋势[2]。
1 工作原理及器件参数设计1.1 工作原理四象限探测器的基本工作原理如图1所示。
器件的4 个象限同时工作在反向偏压下,当光照射时,在每个象限耗尽区内,光激发产生的载流子分别向两极运动,电子在运动过程中经过具有高电场的电荷层加速,在倍增层内碰撞产生大量的空穴电子对(雪崩效应),在外电路形成比光激发电流大得多的雪崩电流,实现器件的增益,同时,也将光信号转换成了4 路电流信号,如图1(a)所示。
四象限探测器定位精度的分析与仿真

四象限探测器定位精度的分析与仿真宋哲宇;付芸;范新坤;吴凯【摘要】In order to study the tracking accuracy of four-quadrant(QD)detectors in space laser communication sys-tems and the effects of spot characteristics and external environment on detectors,at first,the principle of four-quad-rant detector flare detection is deduced through the theory,the effects of facula size,facula centroid position,back-ground light,facula energy distribution,dead-area and the SNR are simulated and analyzed. The results show that the sensitivity of the position detection is reduced with the increase of the facular size. The facula energy distribution,back-ground light and dead-area will have an effect on the detection accuracy of the spot position;and the improvement of the signal-to-noise ratio can improve the position detection accuracy.%为了研究影响四象限探测器(QD)在空间激光通信系统中的跟踪精度,以及光斑特性和外部环境对探测器的影响.首先理论推导了四象限探测器光斑检测的原理,然后对光斑半径、光斑位置、背景光、光斑能量分布、死区、系统信噪比等因素进行了仿真分析.研究结果表明,光斑半径的增加会降低四象限探测器的位置探测灵敏度.光斑能量分布、背景光和死区会对光斑位置检测精度产生影响,系统信噪比的提高可以提高位置检测精度.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2018(041)002【总页数】4页(P41-44)【关键词】背景光;光通信;建模;仿真;信噪比【作者】宋哲宇;付芸;范新坤;吴凯【作者单位】长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022【正文语种】中文【中图分类】TN929.1四象限探测器(QD)具有响应快、动态范围宽、灵敏度高、体积小等特点,广泛应用在光电跟踪领域[1]。
4象限传感器
0.2 0.45
0.2 0.45
6
8
10
10
80
80
5
8
40 TO-8 型
单位 μm A/W
V
响应度Re(A/W)
0.5 4.2
0.6 0.5 0.4 0.3 0.2 0.1
0 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
波长um
图 1 光谱响应曲线
外形尺寸及使用简图(管脚皆为背面示意图)
原理
器件是反向偏置的半导体二极管阵列,由于器件是象限化的,因此当被测物体的光幅 射到器件各个象限的辐射通量相等时,则各个象限输出的光电流相等。而当目标发生偏移 时,由于象限间辐射通量的变化,引起各个象限的输出光电流的变化,由此可测出物体的
方位,从而起到跟踪、制导的作用。
技术指标(Ta=23℃)
符 参数
重庆航伟光电科技有限公司
Associated Opto-Electronics (Chongqing) Corp.
ቤተ መጻሕፍቲ ባይዱ四象限 Si PIN 光电探测器 GT111,112
特点
u 低暗电流 u 高均匀性、高对称性 u 高可靠性 u 盲区小
应用
u 激光瞄准、制导跟踪 及探索装置
u 激光微定位、位移监 控等精密测量系统。
号
光敏面直径
Φ
光谱响应范围
λ
光
参
响应度
Re
数
响应时间
tr
电
暗电流
ID
参 反向击穿电压
VBR
数
电容
Cj
工作电压
VR
管座型号
特性曲线
测试条件
VR=40V,λ=1060nm VR=40V,λ=900nm
光伏探测器详解

B、雪崩光电二极管(APD)
一般旳硅光电二极管和PIN光电二极管是没有内增益旳光 伏探测器,而在光探测器系统中旳实际应用中,大多是对微 光信号进行探测,采用具有内增益旳光探测器将有利于对薄 弱光信号旳探测。
雪崩光电二极管是具有内增益旳光伏探测器,它是利用 光生载流子在高电场区内旳雪崩效应而取得光电 料主要是硅和锗,实际旳器件具有极短旳响应时间,即数以 千兆旳相应频率,高达100到1000旳增益,所以在光纤通讯、 激光测距、激光雷达和光纤传感器等领域得到了广泛旳应用。
5、频率响应及响应时间 6、温度特征
五.光电探测器应用
1.光电池及应用 光电池是一种无需外加偏压就能将光能转换成电能旳光伏探测 器。光电池能够分为两大类:太阳能光电池和测量光电池。太 阳能光电池主要用作电源,对它旳要求是转换效率高、成本低, 因为它具有构造简朴、体积小、重量轻、可靠性高、寿命长、 在空间能直接利用太阳能转换电能旳特点,因而不但仅成为航 天工业上旳主要电源,还被广泛地应用于供电困难旳场合和人 们日常生活中。测量光电池旳主要应用时作为光电探测用,即 在不加偏置旳情况下将光信号转换成电信号,对它旳要求是线 性范围宽、敏捷度高、光谱响应合适、稳定性好、寿命长,被 广泛应用在光度、色度、光学精密计量和测验试中
一、三种工作模式
(1)零偏置旳光伏工作模式 若p-n结电路接负载电阻RL,如图,有光照射
时,则在p-n结内出现两种相反旳电流:
光激发产生旳电子-空穴对,在内建电
场作用下形成旳光生电流Ip,它与光照有 关,其方向与p-n结反向饱和电流I0相同;
光生电流流过负载产生电压降,相当于
在p-n结施加正向偏置电压,从而产生电 流ID。
(1)光电池旳构造 光电池是用单晶硅构成旳,在一块N型硅片上扩散P型杂质,形成一种扩 散np结;或在P型硅片扩散N型杂质,形成pn结,在焊上两个电极。P端 为光电池正极,N端为负极,一般在地面上应用作光电探测器旳多为np型。 pn型硅光电池具有较强旳抗辐射能力,适合空间应用,作为航天旳太阳 能电池。下图为是硅光电池结 构示意图。
四项限光电探测器方案

四象限光电探测器设计方案 (4QD )四象限探测器在一个光敏面用十字沟道隔成四个象限,如图所示,每个象限相当于一个光电管,当激光垂直入射时,经聚焦的光斑照射在四象限的中心位置上,四个象限接收的光强一样,输出的光电流也相同。
当激光光束以其他的角度入射时,光斑的位置也随之偏移,四个探测器输出的光电流也就不相同,对四个探测器输出的电流进行差分处理,就可以得到光斑偏离中心的误差信号。
4QD 计算光斑重心位置的公式如下: 1234123414231234()()()()I I I I X KI I I I I I I I Y K I I I I +−+=++++−+=+++式中K 为比例系数,代表四象限探测器的角灵敏度,它与光斑形状和大小直接相关。
当激光光斑的光强为高斯分布时,在线性响应区间时,K 与光斑直径成反比。
光束误差偏角和光斑位置之间的关系如图,可通过式计算。
四象限探测器的光灵敏度很高,探测频率也可达几千赫兹,外围电路也相对简单,因此是精瞄传感器的一种理想选择。
四象限探测器允许水平和垂直的角度分别独立估测,其输出信号为水平和垂直的角误差电压。
空间跟踪就是通过即时的误差电压对伺服电机进而对光学硬件进行连续调节来实现。
但是四象限传感器的光敏面比较小,且存在死区。
另外由于四象限传感器实际上只是探测四个区域的光强,因而算得的位置偏移的精度和线性度都受到光斑大小和形状的影响。
这就需要设计符合精瞄准系统要求的4QD 传感器。
根据以上指标,要求探测精度优于1‰,综合各种器件,选择日本滨松公司Q 这款4QD图 四象限探测器接受光斑示意图表 4QD S-6695-01性能指标[14]2.4.2 4QD 的电路设计由于4QD 输出的是弱的电流信号,而AD 采集的通常是0-5V 的模拟电压信号,因此需要经过后续电路的I/V 转化和信号调理。
电路的要求是符合带宽条件下的高精度的运算放大电路:首先要满足带宽的需要,保证4QD 电路高的采样能力;第二要求4QD 四个象限的放大倍数较精确的相等,保证四个象限的光电转化输出效率相同;第三要求放大器还应能够抑制传感器上的高频噪声,减少传感器噪声[17]。
上海欧光EE5113说明书

上海欧光多功能信号测试仪主要特点EE5113是上海欧光一款通用型PSD/四象限探测器信号测试仪,主要用于将多个一维PSD、二维PSD或四象限探测器所接收的光强信号转换为位置信号,并通过PC对位置信号进行显示和存储,具有通用性好,使用简单的特点。
l PC界面显示总光强和X、Y坐标l具有置零功能,设置当前光点位置为零位参考点l对总光强大小提供“过小”、“适中”、“过大”三个参考意见l X、Y坐标分辨率1 uml可连接多种位置传感器:l每台测试仪同一接口可连接一维PSD、二维PSD或四象限探测器l具有数据记录功能,能长时间记录位置信号变化供事后分析硬件说明1.前面板前面板由以下几部分组成:1)USB接口,通过USB数据线连接电脑。
2)5V电源接口,用来给本测试仪提供电源。
2.后面板传感器接口,用来连接传感器,一维PSD、二维PSD、四象限探测器前置放大板均可以接在此接口上。
软件使用说明1.在电脑上安装多功能测试仪程序,并通过开始菜单或桌面快捷方式运行。
2.选择待检测的传感器类型:一维PSD、二维PSD、四象限后点击打开。
若提示未检测到控制器,请检查USB连接和电源连接,如果二者均正常,请关闭程序,而后断开电源和USB连接后再次连上,再打开程序测试。
3.一维PSD操作界面说明4.二维PSD操作界面说明5.四象限探测器操作界面说明序号说明1 四象限探测器光斑位置显示窗口使用步骤1.安装测试仪的USB驱动程序。
2.安装测试的主界面程序。
3.连接选用的传感器前置放大器至测试仪的后面板上的接口。
4.连接测试仪至5V电源适配器。
5.通过USB数据线将测试仪连接至电脑,并打开多通道PSD测试程序,对PSD数据进行观测或存储。
使用注意事项1.当光点没有照射到传感器或光点能量太强或太弱时,光点位置计算误差过大,所以请将2.光功率调整到合适范围内再进行观察。
3.置零按钮必须在光点照射在传感器上按下才有意义,否则光点坐标计算不正确。
第六章象限探测器和光电讲解
二维PSD
• 二维PSD用于测定光点在平面上的二维(x, y)坐标。
• 受光面是方形的,比一维PSD多一对电极。 • 按结构分为以下三种形式: ① 单侧四电极型 ② 双侧双电极型 ③ 枕形
双侧双电极型
• 电极分别设置在器件的两侧(前表面和后表面) • 每个位置信号(光电流)由两个电阻层分成两
此分辨率和精度有限。
光电位置传感器
• Position Sensitive Detector,PSD • 利用离子注入技术,一种对入射到光敏面上的光
点位置敏感的光电器件,分一维和二维两种。 • 可确定光的能量中心位置。
PSD的优点
• 光敏面上无象限分割线,消除死区 • 对光斑形状无严格要求,与聚焦无关 • 可连续测量,分辨率高,一维PSD可达
激光制导的导弹头部有四个排成十字形的激光接收器(四象限 探测仪)。如果四个接收器收到的激光一样多,就按原来方向 飞行,如果有一个接收器接收的激光少了,它就自动调整方向。
激光制导技术
• 核心部件:激光导引头 • 功能:利用激光目标指示器照射目标,反射回来
的信号经过接收处理形成控制指令控制导弹飞行。
美国海尔法导弹采用四 象限硅雪崩光电二极管
部分 • 位置探测能力强 • 位置探测误差小,分辨率高
单侧四电极型
• 四个电极都设置在器件的前表面 • 光电流在同一电阻层内分成四个部分 • 周边有相对较大的误差 • 施加偏压容易,暗电流小,响应速度快
枕形
• 为减少周边误差,对光敏面和电极进行了 改进。
• 边缘四周误差减小,暗电流小,响应时间 快,容易施加偏压
0.2μm • 同时检测光强和位置 • 忽略光斑形状细节,直接给出“重心”位
四象限探测器的特性测试

四象限探测器的特性测试赵馨;佟首峰;姜会林【摘要】研究了用四象限探测器检测光斑中心位置时,入射光斑的各种特性和外部环境对象限探测器输出产生的影响.通过理论推导得出了入射椭圆高斯光斑时光斑中心位置与探测器输出的关系公式及检测灵敏度公式;搭建实验系统完成了室内及野外测试实验.实验结果表明,室内环境下探测器具有较高的检测精度与细分能力;在极限灵敏度下通过数字滤波可以使器件具有36细分的能力;测量了象限探测器的电压特性,完成了背景光特性、光斑大小特性、信噪比特性测试实验.野外实验表明,光强闪烁对探测器影响很大,当大气折射率结构常数为10-16时,距离在830 m时器件仅具有7细分能力,距离在12.5 km时基本没有细分能力,已经无法进行光斑检测.【期刊名称】《光学精密工程》【年(卷),期】2010(018)010【总页数】7页(P2164-2170)【关键词】四象限探测器;椭圆高斯光斑;光强闪烁;细分能力【作者】赵馨;佟首峰;姜会林【作者单位】长春理工大学,吉林,长春,130022;长春理工大学,吉林,长春,130022;长春理工大学,吉林,长春,130022【正文语种】中文【中图分类】TP212.14;TN3661 引言四象限探测器因为具有灵敏度和位置分辨率高、光谱范围宽、体积小、响应快、动态范围宽等特点,在光斑位置检测中得到了广泛应用,尤其是在空间光通信中,光波段从800 nm改为1 550 nm,使用四象限探测器对实现通信光与精信光标统一、减小系统体积十分有效;而在1 550 nm波段用于激光光斑位置判定时,由于红外CCD 探测器受限,象限探测器也是理想的选择。
从目前国内外报道的空间光通信系统成功案例和通信系统规划看,象限探测器主要应用在捕获、对准、跟踪(APT)系统精跟踪的光斑检测和提前量伺服系统的光斑检测。
例如,日本NADSA研制的LUCE系统采用象限探测器来完成精跟踪光斑检测及光斑中心计算,其链路为光通信系统的垂直链路[1-2]。
四象限光电探测器电路_概述解释说明
四象限光电探测器电路概述解释说明1. 引言1.1 概述本文介绍了四象限光电探测器电路的概念、原理和应用领域。
四象限光电探测器是一种能够实现光信号的双向检测和定位的器件。
它具有高灵敏度、快速响应和良好的定位准确性等优势,因此在许多科学研究和工程应用中得到广泛应用。
1.2 文章结构本文共分为五个部分:引言、四象限光电探测器电路、四象限光电探测器电路的组成部分、实验与结果分析以及结论与展望。
引言部分对本文的内容进行了简要概述,接下来将详细说明四象限光电探测器电路的原理、概念和应用领域。
然后,我们将讨论构建四象限光电探测器电路所需的关键要素以及信号处理与放大电路设计方法。
接着,我们描述了进行实验的设备和试验方法,并展示并分析了实验结果。
最后,文章总结回顾了四象限光电探测器电路,并展望了进一步研究中存在的问题和改进方向,以及该技术的应用前景和发展趋势。
1.3 目的本文的目的是全面介绍四象限光电探测器电路的原理和应用,为读者提供一个清晰的了解这一技术的框架。
通过详细描述四象限光电探测器电路的组成部分和信号处理方法,读者可以了解到如何构建和优化这种电路。
此外,实验结果和分析将进一步验证该技术在不同领域中的应用性能,并为未来研究提供参考。
通过阅读本文,读者将对四象限光电探测器电路有一个全面而深入的理解,并能够探索其更广阔的应用前景。
2. 四象限光电探测器电路2.1 光电探测器原理光电探测器是一种能够将光信号转化为电信号的装置。
其工作原理基于内部光敏材料与外界光线相互作用,产生电流或电压输出。
常见的光电探测器包括光敏二极管、光敏三极管、光敏场效应晶体管等。
2.2 四象限光电探测器的概念和优势四象限光电探测器是一种能够在两个正交方向上进行双向测量的特殊类型的光电探测器。
传统的单象限光电探测器只能在一个方向上进行单向测量,而四象限光电探测器可以同时获取样品对于输入光源位置和运动速度的信息。
四象限光电探测器具有以下几个优势:1. 双向检测:四象限结构使得该种类型的光电探测器能够检测目标物体在平面上的水平和垂直运动。
基于四象限的光斑位置探测系统设计

科学技术创新2020.28基于四象限的光斑位置探测系统设计龚元霞刘福华许孝敏刘杰(西京学院理学院,陕西西安710123)1位置探测器介绍本文主要研究的是运动光斑的位置探测,现有的运动光斑的探测器有很多种,主要有电荷耦合器件、位置敏感器件以及四象限探测器。
本文选择的四象限探测器,探测系统的核心器件进行研究。
1.1探测器的选择四象限探测器是将四个性能完全相同的光电探测器按照直角坐标系的方式排列,利用光生伏特效应将光信号转换为电信号的器件。
光照射到探测器上,探测器的光敏面会形成四个单独的区域,由于光斑占用每个区域的面积不同,从而换算出光斑占用光敏面四个区域的光电压不同,来解算光斑实际位置。
本文选择的四象限探测器如图1,具体尺寸为30mm (长)X30mm (宽)X15mm (厚),感光口径为10mm ,入光口上带螺纹,内螺纹大小为M12。
图1四象限探测器探测器的下侧有M4的螺丝,长度约为6mm ,用此连接支杆可以固定整个探测器。
末端接头采用的是标准的6针PS2接头,如图2。
图2探测器末端接头选用的四象限探测器主要性能参数:根据本系统所应用到的环境以及硬件的要求,四象限探测器的主要性能参数设计如表1。
表1四象限探测器性能参数1.2四象限探测器工作原理图3探测原理当光照射四象限探测器的光敏面上后,光斑与探测器光敏面的分布如图在探测器平面上的分布如图3所示,因探测器有四个像元,四个像元是独立的,光斑因为离四个像元的远近不同,占用的每个像元的面积也有所不同,这样四个像元因为光电效应产生的电压也有所不同,根据这些电压差别可换算出光斑在探测器上的相对位置。
1.3探测算法的选择根据本文四象限探测器的探测原理,电压与光斑位置的解算关系如下:(1)(2)本文选择比较简单的加减定位算法对光斑位置进行计算摘要:随着各种探测技术的蓬勃发展,光斑位置探测在工业精密检测以及导弹制导等领域受到极大的欢迎。
通过比较多种探测器的性能及特点,将选择一种象限探测器作为本文光斑探测系统的核心探测器件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、原理
四象限光电探测器实际由四个光电探测器构成,每个探测器一个象限,目标光信号经光学系统后在四象限光电探测器上成像,如图1。
一般将四象限光电探测器置于光学系统焦平面上或稍离开焦平面。
当目标成像不在光轴上时,四个象限上探测器输出的光电信号幅度不相同,比较四个光电信号的幅度大小就可以知道目标成像在哪个象限上(也就知道了目标的方位),若在四象限光电探测器前面加上光学调制盘,则还可以求出像点偏离四象限光电探测器中心的距离或θ角来。
图1 目标在四象限光电探测器上成像
图2是方位探测器原理框图。
图2 方位探测器原理
信号通过放大和调理后由由A/D转换器(本系统中采用ADS7864)采样转换成数字量送入单片机,由单片机处理后得到目标的方位,并根据实际系统的需要输出方位控制指令。
二、电路设计
根据实际系统的需要,A/D转换器用ADS7864,单片机用最常见的89C51。
这里对ADS7864作一介绍。
ADS7864是TI公司生产的12bit高性能模数转换器,片上带2.5V基准电压源,可用作ADS7864的参考电压。
每片ADS7864实际由2个转换速率为500ksps的ADC构成,每个ADC有3个模拟输入通道,每个通道都有采样保持器,2个ADC组成3对模拟输入端,可同时对其中的1~3对输入信号同时采样保持,然后逐个转换。
由于6个通道可以同时采样,很适合用来转换四象限光电探测器的4路光电信号,剩下2个通道作系统扩展用。
*下面主要介绍电路中的信号采样转换和处理部分。
ADS7864前端调理电路
模数转换器的前端调理电路缩放和平移要采样的信号,通过调理后的信号适合A/D转换器的模拟输入要求。
图3是ADS7864一个输入通道的前端调理电路,
图3 ADS7864前端调理电路
ADS7864 模拟输入通道的+IN和-IN的最大电压输入范围为-0.3V~+5.3V(ADS7864 +5V供电)。
图3的电路中使用了2个运放,A1用作跟随器,用来缓冲ADS7864输出的2.5V基准电压源;A2和四个电阻构成了信号调理网络,适当配置R1~R4电阻可以实现对
输入信号Vi的缩放和平移以适合ADS7864模拟通道的输入要求。
+IN端的输入电压表示如下:
图片看不清楚?请点击这里查看原图(大图)。
ADS7864与单片机连接电路
ADS786转换后的结果通过DB0~DB15输出,若将BYTE引脚接高电平,则每个结果分两个字节从DB0~DB7读出,用8位的单片机读取非常的方便。
为了避免89C51对ADS7864的干扰,用一片74HC244缓冲器来连接89C51的P0口和ADS7864的DB0~DB7,控制ADS7864的信号/HOLDA~/HOLDC、A0~A2也是通过89C51的P0口输出,用一片74HC373来锁存这些控制信号。
图4是89C51与ADS7864的连接电路图,其中略去了其它的一些电路连接。
图片看不清楚?请点击这里查看原图(大图)。
图4 ADS7864与89C51的连接
系统采用89C51的P2.7寻址ADS7864,地址为8000H,同时用这个地址信号配合89C51的/WR和/RD信号作74HC244和74HC373的使能信号。
要求当89C51的
/RD=0,P2.7=1时才开启74HC244,读取ADS7864的转换结果;当89C51的
/WR=0,P2.7=1时74HC373才锁存89C51 P0口上的数据信号,实现往ADS7864的控制端写数据,其它时候74HC244和74HC373都是关闭的,这样避免了89C51 P0口上的其它信号对ADS7864的干扰。
采用锁存器74HC373来连接89C51和ADS7864的原因是为了在ADS7864转换数据的时候保持/HOLDA~/HOLDC、A0~A2端的电平保持不变,免得影响ADS7864转换数据的精度。
74HC244和74HC373的使能信号真值表如下:
根据真值表,可以用图4中的逻辑电路来实现这两个使能信号。
系统的最终目标就是获取数据,然后计算得出结果。
89C51控制ADS7864转换和读取转换结果的代码如下:
启动转换后,在读取数据前需要延迟的指令周期数需根据89C51和ADS7864的运行速度来决定。
有关计算目标方位的代码和算法这里就不再叙述。
三、结束语
使用本文提出方案设计的方位探测仪器具有简单有效、灵活易扩展、体积小、使用方便等特点,可以应用在很多需要测量目标方位的领域。