udec动力计算需要注意的问题
动力性计算
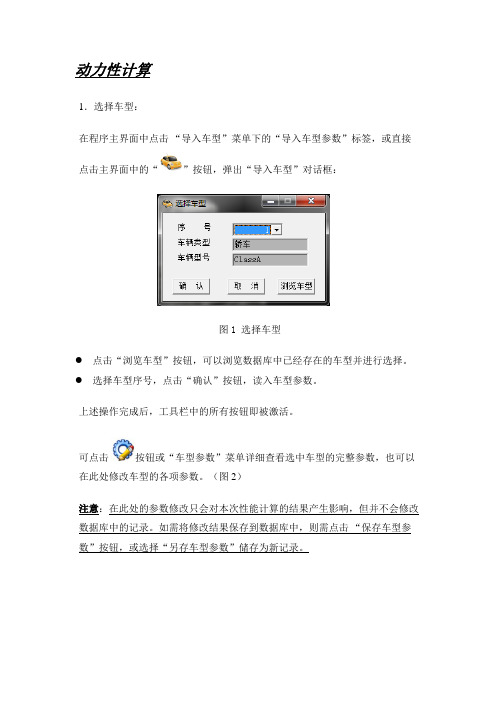
动力性计算1.选择车型:在程序主界面中点击“导入车型”菜单下的“导入车型参数”标签,或直接点击主界面中的“”按钮,弹出“导入车型”对话框:图1 选择车型●点击“浏览车型”按钮,可以浏览数据库中已经存在的车型并进行选择。
●选择车型序号,点击“确认”按钮,读入车型参数。
上述操作完成后,工具栏中的所有按钮即被激活。
可点击按钮或“车型参数”菜单详细查看选中车型的完整参数,也可以在此处修改车型的各项参数。
(图2)注意:在此处的参数修改只会对本次性能计算的结果产生影响,但并不会修改数据库中的记录。
如需将修改结果保存到数据库中,则需点击“保存车型参数”按钮,或选择“另存车型参数”储存为新记录。
图2 车型参数一览2.进行整车动力性计算:点选程序主界面中的按钮打开动力性计算窗口:图3 动力性计算界面点击“动力性计算”按钮,系统进行动力性计算,并在图表和输出栏中显示出计算结果。
计算结果数据包括:(1)最高车速;(2)最大动力因数;(3)最大爬坡度;(4)0-100km/h加速时间, 0-400m加速时间;(5)直接档加速时间;输出以下图表:(1)驱动力-阻力平衡图;(2)动力因数图;(3)功率平衡图;(4)加速度图;(5)爬坡度图;(6)原地起步换档加速曲线;(7)直接档加速曲线;系统提供了单点查询功能,可查询任意车速对应的动力性性能参数。
点击“保存图片和数据”按钮,将计算结果保存到报表中。
说明:在进行多于一次的计算时,会出现一个对话框提示您选择“是否保留上次计算结果并进行比较”,若选择“否”,则不进行比较,若选择“是”,则保留上次结果,并与本次计算结果进行比较。
以下是部分计算结果截图:图4 驱动力—阻力平衡图图5 爬坡度图图6 百公里加速时间图。
UDEC学习整理资料
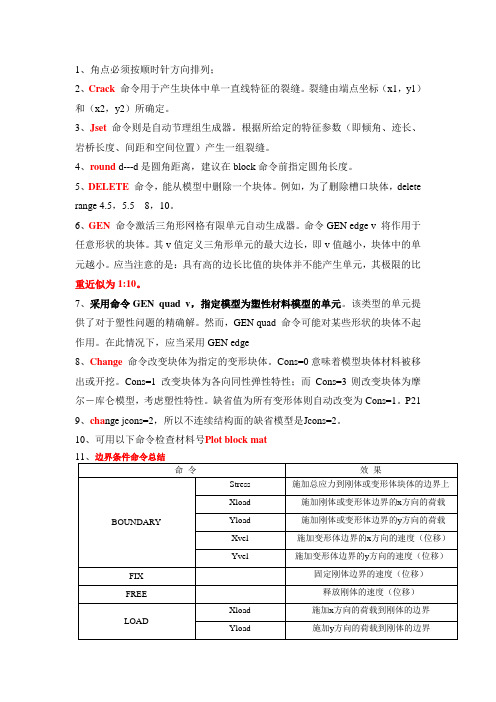
1、角点必须按顺时针方向排列;2、Crack 命令用于产生块体中单一直线特征的裂缝。
裂缝由端点坐标(x1,y1)和(x2,y2)所确定。
3、Jset 命令则是自动节理组生成器。
根据所给定的特征参数(即倾角、迹长、岩桥长度、间距和空间位置)产生一组裂缝。
4、round d---d是圆角距离,建议在block命令前指定圆角长度。
5、DELETE 命令,能从模型中删除一个块体。
例如,为了删除槽口块体,delete range 4.5,5.5 8,10。
6、GEN命令激活三角形网格有限单元自动生成器。
命令GEN edge v 将作用于任意形状的块体。
其v值定义三角形单元的最大边长,即v值越小,块体中的单元越小。
应当注意的是:具有高的边长比值的块体并不能产生单元,其极限的比重近似为1:10。
7、采用命令GEN quad v,指定模型为塑性材料模型的单元。
该类型的单元提供了对于塑性问题的精确解。
然而,GEN quad 命令可能对某些形状的块体不起作用。
在此情况下,应当采用GEN edge8、Change 命令改变块体为指定的变形块体。
Cons=0意味着模型块体材料被移出或开挖。
Cons=1 改变块体为各向同性弹性特性;而Cons=3则改变块体为摩尔-库仑模型,考虑塑性特性。
缺省值为所有变形体则自动改变为Cons=1。
P219、cha nge jcons=2,所以不连续结构面的缺省模型是Jcons=2。
10、可用以下命令检查材料号Plot block mat12、INSITU命令用来初始化应力。
采用该命令,可以赋值初始应力。
13、hist xvel 5, 5 hist ydisp 0, 11 第一个是记录位移坐标(x=5,y=5)附近结点x方向的速度,而第二个是记录接近坐标(x=0,y=11)位置处y方向的位移。
14、set grav 0.0 , -9.81第一个是x方向的加速度,第二个值为y方向的加速度为9.81m/sec2(向下作用)。
岩土专业软件udec和flac的区别

1Flac:大变形、破坏,灵活性,开放性,软件来源于实际工程,所以可靠度很高,但并是能解决所有的问题;Ansys & Abauqs:通用性软件,在结构方面很强,特别是Abaqus 在非线性方面。
在岩土方面,我没有实际用过,只别人说还可以。
Plaix:操作比较简单,开发人员都有工程背景,软件计算的结果比较可靠;Midas/Gts:韩国的软件,以前是搞桥梁的,最近才转岩土,没有很强的理论背景,不知道计算出来的东西可不可靠。
或者在某一方面得到实际工程的验证,但可靠度还有呆进一步;Geo:边坡、非饱和渗流方面比较牛,特别是非饱和渗流方面,理论创建者是非饱和渗流的奠基人;Rc:岩石力学方面很牛,原因也是因为理论支持是这方面的大牛人;总结:建议从难的基础的学起,搞基础理论搞清楚了,做出来的东西才是东西。
不然随便拿个软件算算,只在乎软件的易学以及图形的漂亮,而不管到底最后结果如何,肯定会出问题的。
所以从Flac 软件学起,搞清楚理论背景。
把理论搞清楚后,再选择一些相对简单的软件比较好。
这样对计算出来的结果心里有底。
2通用软件的功能的确比较强大,但是针对性不强,比如我们都是学岩土的,土的本构关系、土和结构的接触啊等都是比较复杂,如果是通用软件,那么你都要一一的去设置,非常麻烦,当然如果你学的非常好,土力学的概念非常清晰,有限元的知识功底也很强大,那当然是没问题的。
如果我们是个新手,我想在一开始的单元选择和网格划分上就有点难住了,我认识很多人都是用通用软件,但只是照着例子做一遍,并不知道为什么要那样设置,等到变个情况时候,就是不知道怎么做了!我们学习软件当然并不是只学个操作,重要的原理,知道所以然。
所以,我的建议是先学比较容易上手的专业软件,这样你可以通过学习这个软件带动自己学习这个专业的知识,比如看软件的效验手册和科学手册你都会学到很多,让你回顾一下,岩土的一些理论比如本构、固结、渗流等,并且让你知道软件大概是怎么去模拟及它们的误差会在哪里。
(2021年整理)UDEC实例详解
(完整版)UDEC实例详解编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整版)UDEC实例详解)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整版)UDEC实例详解的全部内容。
(完整版)UDEC实例详解编辑整理:张嬗雒老师尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布到文库,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是我们任然希望(完整版)UDEC实例详解这篇文档能够给您的工作和学习带来便利。
同时我们也真诚的希望收到您的建议和反馈到下面的留言区,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请下载收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为〈(完整版)UDEC实例详解> 这篇文档的全部内容。
实例1 荷载作用下边坡稳定问题朔准线黄河大桥,边坡高105m,层理间距取3m,岩层视倾角6°;主节理间距取2m,视倾角85°,计算模型如下:DEM计算模型相关计算参数取值如下:桥基长15m,宽12m,荷载180000kN;灰岩弹性模量E=4×104MPa,泊松比μ=0.23,岩体密度γ=2.7×103kg/m3。
newround 0.05set delc offblock 0 0 0 50 50 50 62。
6 115。
2 68.9 123。
9 85。
5 132。
5 &105.5 140.1 125.4 156.4 180 156。
4 180 0jset 85,0 300,0 0 0 3,0 (50 50)jset 6 0 300 0 0 0 4 0 (50 50)gen auto 5change jmat=1 range angle 84 86change jmat=2 range angle 5 7prop mat=1 den=2700 b=1。
带式输送机驱动力计算标准
带式输送机驱动力计算标准
带式输送机驱动力的计算标准通常遵循以下步骤:
1. 确定载荷:首先需要确定带式输送机所需搬运的物料的质量和流量。
2. 计算输送带张力:使用带式输送机的公式或计算方法,计算出输送带张力。
3. 计算摩擦阻力:根据输送带的长度、角度、支撑滚筒的数量、与物料的摩擦系数等因素,计算出输送带的摩擦阻力。
4. 计算惯性阻力:考虑到输送带和载荷的加速度和减速度,计算出惯性阻力。
5. 计算推力:将摩擦阻力和惯性阻力相加,得到带式输送机所需的总推力。
6. 选择驱动装置:根据总推力和输送带的速度要求,选择适当的电动机或其他驱动装置。
在进行带式输送机驱动力计算的过程中,可能还需要考虑一些其他因素,例如输送带的材质、传动装置的效率、额定功率等。
因此,在实际应用中,往往需要根据具体情况进行调整和修正。
电动汽车动力匹配计算要求规范(纯电动)
电动汽车动力匹配计算设计规范编制:年月日审核:年月日批准:年月日2015-10-15发布2015-11-1实施XXXX有限公司发布目录一、概述 (1)二、输入参数 (1)2.1 基本参数列表 (1)2.2 参数取值说明 (1)三、XXXX动力性能匹配计算基本方法 (2)3.1 驱动力、行驶阻力及其平衡 (3)3.2 动力因数 (6)3.3 爬坡度曲线 (6)3.4 加速度曲线及加速时间 (7)3.5 驱动电机功率的确定 (7)3.6 主驱动电机选型 (8)3.7 主减速器比的选择 (8)参考文献 (9)一、概述汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。
动力性是各种性能中最基本、最重要的性能之一。
动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。
因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。
二、输入参数2.1 基本参数列表进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的基本参数是保证计算结果精度的基础。
下表是XXXX动力匹配计算必须的基本参数,其中发动机参数将在后文专题描述。
表1动力匹配计算输入参数表。
2.2 参数取值说明1)迎风面积迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。
XXXX车型迎风面积为A一般取值5-8 m 2 。
2)动力传动系统机械效率根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率T η主要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等部分串联组成。
采用有级机械变速器传动系的车型传动系统效率一般在82%到85%之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进行修正,通常取传动系统效率T η值为78-82%。
3)滚动阻力系数f滚动阻力系数采用推荐的客车轮胎在良好路面上的滚动阻力系数经验公式进行匹配计算:f =⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+4410100100a a u f u f f c 其中:0f —0.0072~0.0120以上;1f —0.00025~0.00280;4f —0.00065~0.002以上;a u —汽车行驶速度,单位为km/h ;c —对于良好沥青路面,c =1.2。
UDEC3.0中文手册33-63
-33-
特殊 的几何 参数 对力学 特性 产生的影响 可以进行 定量 描述 。 同时,在获 得 现 场观测的节 理模 式情况下,采 用人工模 式与观 测模式 相匹配方法决定 生成的参数。 一个节理组可以通过 8 个生成参数表述: 4 个几何 参数的 均值和 4 个随机参数的均 方差 。由 JSET 命令给出 的参数如下: JSET a m、a d 、t m、t d 、g m、g d 、s m、s d < x0、y 0 >< ad 0 > 在此, a -节理与 x 轴的 夹角;
(K + 4 3 G max ∆z min
在式 中, K 、 G - 分别 是体积模量和剪 切模量;
-34-
理论与背景 第 1.1.3 节中的 range 关键词的描述。在大 部分情况下, 通过 jregion n 关键 词定义各种 区域,在此 n 是 指 定 JREGION 命令的参考序号 id。 JREGION 定义 了一个 凸多边形区域来 限制节理组的生成范围 。该命令参数如 下: JREGION id n x1 y1 x2 y2 x3 y3 x4 y4 <delete> 每 一个节理 区域是通过 id 序号识 别。区域的坐标 按顺时 针方向定义了节理产生的边 界。如果给出选择 的关键词 delete ,在此之前 由 JSET、VORONOI 或 CRACK 命令生成 的节理将 全部 被 删除。 这 可避免当指 定多 个节理 区域情况下 , 被相邻区域 产生的节理所 切割。 其他相对于 JSET 命令(即 mat n )的关键词 range 也能 用来限制 块体被 切割。如果 对 JSET 命令没 有指定范围,将产生 遍及整个区域 的节理。 JSET 生 成器也可能通过设定很大的 t m 和 s m 值用来产生贯穿 UDEC 块体的一条节 理。请记住, JSET 能够产生不连续节理。不连续节理完全处在块体里边不能看见。当 一个变形块体开始生成单元或当一个刚体模型开始运行时,所有的节理段将被删除 。 3.2.2.2 VORONOI 多边形生成器 VORONOI 生成器产生 随机大小的 多边形 块体。 UDEC 模型中的一个或 多个块体能 够 在 细 分 成 任意 大小 的 Voronoi 子 块 。 该 节理生 成器 对 模 拟 裂缝扩展 是 有 用的。当 Voronoi 块体间的节理强度 被超过 时将发生 断裂。 VORONOI 命令具有 下列形式: VORONOI edge l < iterations n> <round v> < range … > 对 于 Voronoi 多边形 指 定平 均棱 长。 多边形 具 有 随机尺寸, 但具 有 平 均棱 长 l 。 Voronoi 块体 的 大小尺寸 能够通过增加 迭代次 数 变得 均匀缺省 值 n=5 。也 能 指 定 圆 角长 度。 圆角长 度, v 必须 至少小 于块体棱长 l 的 20 倍。 当应用 VORONOI 命令时 ,多边形区域应当略大 于被细 分的块体区域。 这将抑制边 界影响。Range 关键词在产生 Voronoi 块体区域的用 法,与 JSET 命令具有 相同的方 式。 Voronoi 算法 根据 随机 分布 点 从多边形 区域 开始。然后允 许内 部点移 动。迭代 过程 运 动到这 些 点。 迭代 步 越 高 , 点 间距 越均匀 。接 下来,所有 点 产生 三角 形。 最 后, 通过 做具 有公共 边所有 三角形的 垂直平分线,生成 Voronoi 多边形。多边形在所 指定区域被 其边 界所截 取。 3.2.2.3 例子 为 了说明节理的生成过程 ,下面给出了产生节理的 几个例子。 例 3.3 四组 规则节理组 new ro 0.01 blo 0 0 0 20 20 20 20 0
udec注意事项
3.9. 6
检查模型响应
UDEC 显示系统的特性,应进行简单试验,检查你所做的和你所期望得到的结果。 例如,如果加载条件和几何形状是对称的,检查其响应对称性。在对模型进行改变后, 运行很少几步(比如说 5 或 10 步)来验证初始响应在适当的位置显现出正确的符号。 如果施加给模型一剧烈振动,应获得一剧烈响应。如果给予模型一种非常合理的 的事情,必将期望一个奇怪的结果。如果在给定的分析阶段获得意料之外的结果,重 新查看所施加该阶段的计算步。 在用模型模拟之前,关键的是考察输出。例如,对于施加块体角点较大速度,如 果仍显示合理的预测结果,则不要继续进行,直至对此做出合理的解释。在此情况下, 可能没有适当地固定边界角点。
3.9.3
检查模型运行时间
UDEC 的求解时间是模型中刚性块体或变形块体结点和接触面数的函数。如果在 模型中几乎没有接触面,则计算时间与 N 3 2 成正比(在此, N 是刚性块体数或变形块 体结点数) 。该公式对弹性问题也成立。对于塑性问题,运行时间略有变化,但没有实 质上的差异。 求解时间随模型中接触面的增加而增加。重要的是检查你的计算机在求解特定问 题的计算速度。 最好的方式就是运行在 5.1 节所给出的测定试验。 然后, 采用这个速度, 基于结点数和接触面数进行插值计算,估算特定模型的计算速度。
3K (1 2 ) E 2G (1 ) E
(3.38)
涉及两组常数。然而,只有当我们所研究的参数接近(但没有达到)这种极限情况下, 方程才成立。对于物理试验,我们并不需要涉及可能或不可能行不通的问题。该方程 是两种定义比例系数方式的简化结果。假设我们有一种逐渐较小抵抗变形的力,但仍 保持常体积变化材料。在此情况下, 接近于 0.5。方程 3K (1 2 ) E 仍必须被满足。 有两种可能性(关于代数基础,而不是物理的争论) :或者 E 保持为有限值(非零)和 K 趋向于任意大值,或 K 保持为有限值和 E 趋向于零。我们排除第一种可能,因为, 对于所有的材料,都存在压缩的极限值(即对于水是 2GPa ,在此,泊松比为 =0.5) 。 这只可能是第二种情况,即使我们假设材料的主要弹性抗力模式是卸载,E 值也戏剧性 变化。我们推论,用( E , )表达材料特性是不合适的。
汽车动力因数d的计算公式
汽车动力因数d是衡量汽车动力性能的重要指标之一,它反映了发动机输出功率与车辆质量之比。
计算公式为:
d = (P / m) * 100%
其中,P表示发动机输出功率,单位为千瓦(kW);m表示车辆质量,单位为千克(kg)。
汽车动力因数d越大,说明车辆的动力性能越好,加速能力和爬坡能力越强。
因此,在设计和选择汽车时,需要根据不同的使用需求和路况要求来确定合适的动力因数。
需要注意的是,汽车动力因数d并不是越高越好。
过高的动力因数会导致燃油消耗增加、排放污染加剧等问题,同时也会增加车辆的制造成本和维护难度。
因此,在实际应用中需要综合考虑各种因素,找到最佳的平衡点。
除了动力因数之外,还有其他一些指标也可以用来衡量汽车的动力性能,例如扭矩、功率密度等。
这些指标都与发动机的设计和参数密切相关,因此在进行汽车研发和改进时需要进行全面的分析和评估。
总之,汽车动力因数d是一个重要的技术指标,它可以反映出车辆的动力性能和效率水平。
通过对动力因数的研究和应用,可以有效地提高汽车的性能和竞争力,满足不同用户的需求和期望。
udec动力计算需要注意的问题
刚度选取模型中块体材料与节理材料的刚度或性质反差较大或者块体尺寸存在较大差异,UDEC 将需要运行很长时间才收敛。
节理法向和切向刚度的力学计算应小于10倍节理毗邻单元的等效刚度。
即n k 和s k ⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡∆+≤min )3/4(max 0.10z G K (3.37) 式中,K 和G 分别是块体材料的体积模量和剪切模量;min z ∆是毗邻节理单元在法线方向的最小宽度。
如果节理刚度大于10倍等效刚度,则模型求解时间将明显大于其刚度比限制在10以内的情况。
在另一方面,如果法向刚度,n k 很低,还可能存在问题。
应对模型代表性应力所产生的节理法向位移有一个大致的估计(n k u /σ=)。
该位移与代表性的单元尺寸相比是小的。
如果该值大于毗邻单元尺寸的10%左右,则一个单元存在错误或刚度应提高。
网格划分UDEC 在计算中,网格单元的尺寸对计算结果有很大影响。
一般而言,网格单元的尺寸越小,计算精度越高,但会占用更多的内存和消耗更多的计算时间。
一般将块体切割成大量的有限差分三角形网格单元,网格单元的尺寸应不大于波长的1/8~/10。
边界条件设置 UDEC 动力计算分析中,计算模型的边界计算模型的区域边界可能引起向外传播波的反射回模型和不允许必要的能量辐射。
当模型的尺寸足够大的时候,材料阻尼将吸收大部分从边界处反射回来的能量,从而最小化消除影响。
然而,大尺寸的模型会增大计算负担。
为了解决这个问题,Lysmer 和Kuhlemeyer(1969)开发了粘性边界,通过在边界的法向和切向设置减震器来吸收能量。
减震器提供的反向力为:n p n v C t ρ-=s s s v C t ρ-=式中,n t 为法向反力(Pa);s t 为切向反力(Pa);ρ为介质的密度(kg/m 3);p C 为应力波在介质中传播的纵波波速(m/s);s C 为应力波在介质中传播的横波波速(m/s);n v 边界质点的法向震动速度(m/s);s v 为边界质点的切向振动速度(m/s)。
基于UDEC岩体爆炸应力波衰减规律的研究

基于UDEC岩体爆炸应力波衰减规律的研究曹攀;颜事龙;倪磊;刘锋;李永军【摘要】通过GENERATE命令划分有限差分网格,BOUNDARY xvisc和BOUNDARY yvisc命令产生静态边界,DAMP命令确定Rayleigh阻尼参数中的最小中心频率和最小临界阻尼比,选用高斯脉冲函数作为动力激励作用于炮孔壁粉碎区边界,输入爆炸动力荷载,建立岩体爆破UDEC数值计算模型,运用离散元件UDEC 模拟了距爆源不同距离处岩体质点爆炸应力波的变化特征.数值模拟与理论推导结果表明:用离散元软件UDEC计算得到的岩体中爆炸应力波衰减规律与理论公式计算结果基本符合,误差在工程实践应用的允许范围之内,因此UDEC适合用于数值模拟爆炸荷载下岩体动态响应.【期刊名称】《爆破》【年(卷),期】2014(031)001【总页数】5页(P42-46)【关键词】UDEC;爆炸应力波;数值模拟【作者】曹攀;颜事龙;倪磊;刘锋;李永军【作者单位】安徽理工大学化学工程学院,淮南232001;安徽理工大学化学工程学院,淮南232001;重庆顺安爆破器材有限公司,重庆404100;安徽理工大学化学工程学院,淮南232001;特种作战学院,广州510000【正文语种】中文【中图分类】TU452爆炸应力波理论一直是工程爆破界的重大研究课题,爆炸应力波传播规律是进行工程爆破理论分析、计算和设计的基础,在采矿、水利建设、道路构筑、机场及港口建设等工程领域具有广泛的应用价值[1]。
研究爆炸应力波的衰减规律对研究岩石动态应力场、损伤场及应力波防护工程的建设都有重要意义。
由于岩体爆炸动力过程极其复杂,物理测试爆炸过程每个细节比较困难,而且实验设备比较昂贵复杂,较多的研究成果集中在物理模型中爆炸应力波的测试,全比例条件下的测试成果很少[2-6]。
数值模拟计算作为一种试验工具,可以进行全比例模拟运算,减少实验成本,再现物理过程。
纵观目前的研究发现,研究者大多采用基于连续介质力学基础的分析软件LS-DYNA进行爆炸模拟[7-10],此种方法较适用于岩石爆破小变形分析,在基于非连续介质力学基础的离散元软件UDEC(Universal Distinct Element Code)中,岩体被看作一种不连续的三角形离散块体,三角形离散块体之间可以有大位移、旋转、滑动乃至块体的分离,能够更真实揭示岩体内应力场变化过程。
电动汽车动力性能匹配计算基本方法

电动汽车动力性能匹配计算基本方法
电动汽车的动力性能主要包括加速性能、最高速度、爬坡能力和能耗
等指标。
在计算动力性能匹配时,首先需要确定电动汽车的车辆质量、车
辆空气阻力系数和滚动阻力系数等基本参数。
其次,需要根据所需的加速
性能和最高速度,计算出所需的功率和扭矩需求。
动力性能匹配计算的基本方法包括以下几个步骤:
1.估算行驶阻力:根据电动汽车的车辆质量、车辆空气阻力系数和滚
动阻力系数等参数,计算出电动汽车在不同速度下所受到的总行驶阻力。
2.计算所需的最大功率:根据所需的最高速度和行驶阻力,计算出电
动汽车在最高速度下所需的最大功率。
这个功率是电动汽车所需的最大输
出功率,也是电机功率的一个重要参考值。
3.估算加速性能:根据所需的加速性能和总行驶阻力,计算出电动汽
车所需的加速度。
通过加速度和车辆质量,可以估算出电动汽车在加速过
程中所需的平均功率。
4.确定电机配置:根据所需的最大功率和加速性能,确定电动汽车所
需的电机配置。
这包括电机的功率、扭矩和减速比等参数。
5.计算电池容量:根据所需的续航里程和能耗,计算出电动汽车所需
的电池容量。
这个容量在一定程度上决定了电动汽车的续航能力。
以上是电动汽车动力性能匹配计算的基本方法。
在实际计算中,还需
要考虑其他因素,如电机效率、电池充放电效率和系统整体效率等。
此外,随着电动汽车技术的不断发展,也需要根据新的技术和需求进行适当的调
整和改进。
动力学解算要点

setAttr $attr $rota; (设置物体属性)
};
Field (场)
Magnitude : 强度值。可以调节场对粒子的控制强度
Attenuation : 衰减。值越大,影响最大。太大或太小看不出效果。
Max distance:衰减边缘。
Apply Per Vertex:与Use Selected as Source of Field 结合使用
Volume Shape:体积形态。使得体积决定受控粒子范围。当体积场的大小,大于最大距离时,受控范围按最大距离计算。
Volume Exclusion:反转体积场
Air(风场):Inherit Velocity:继承速度 Component Only:是否使用继承速度 Enable Spread:风扇形式开启 Inherit Rotation:继承旋转 在Ctrl A 属性窗口可以选择三种模式切换,自动开启相应属性
Depth Sort:深度计算(硬件渲染可以不勾选)
Color Accum:颜色叠加(使粒子颜色更鲜艳)
Use Lighting:使用灯光
Normal Dir:法线方向,与灯光有关
点式:PointSizБайду номын сангаас,没有近大远小,一般调小。
条纹:Tail Fade,是控制透明度的。一般调大,不形成尖细的尾巴。
Barrier 屏障约束(阻挡)
缩小步长(step size)值,可以增加解算精度
collision tolerance 碰撞容差
scale velocity 缩放速度标识(标识物体的运动方向,需要开启display里的相应选项)
UDEC中文指导说明
通用离散元用户指导(U D E C 3.1)2004.9目录1 引言 (1)1.1 总论 (1)1.2 与其他方法的比较 (2)1.3 一般特性 (2)1.4 应用领域 (3)2 开始启动 (4)2.1 安装和启动程序 (4)2.1.7 内存赋值 (4)2.1.9 运行UDEC (5)2.1.10 安装测试程序 (5)2.2 简单演示-通用命令的应用 (5)2.3 概念与术语 (6)2.4 UDEC模型:初始块体的划分 (8)2.5 命令语法 (9)2.6 UDEC应用基础 (10)2.6.1 块体划分 (10)2.6.2 指定材料模型 (16)2.6.2.1 块体模型 (16)2.6.2.2 节理模型 (17)2.6.3 施加边界条件和初始条件 (19)2.6.4 迭代为初始平衡 (21)2.6.5 进行改变和分析 (24)2.6.6 保存或恢复计算状态 (25)2.6.7 简单分析的总结 (25)2.8 系统单位 (26)3 用UDEC求解问题 (27)3.1 一般性研究 (27)3.1.1 第1步:定义分析模型的对象 (28)3.1.2 第2步:产生物理系统的概念图形 (28)3.1.3 第3步:建造和运行简单的理想模型 (28)3.1.4 第4步:综合特定问题的数据 (29)3.1.5 第5步:准备一系列详细的运行模型 (29)3.1.6 第6步:进行模型计算 (29)3.1.7 第7步:提供结果和解释 (30)3.2 产生模型 (30)3.2.1 确定UDEC模型合适的计算范围 (30)3.2.2 产生节理 (32)3.2.2.1 统计节理组生成器 (32)3.2.2.2 VORONOI多边形生成器 (34)3.2.2.3 例子 (34)3.2.3 产生内部边界形状 (35)3.3 变形块体和刚体的选择 (38)3.4 边界条件 (42)3.4.1 应力边界 (42)3.4.1.1 施加应力梯度 (43)3.4.1.2 改变边界应力 (44)3.4.1.3 打印和绘图 (44)3.4.1.4 提示和建议 (45)3.4.2 位移边界 (46)3.4.3 真实边界-选择合理类型 (46)3.4.4 人工边界 (46)3.4.4.1 对称轴 (46)3.4.4.2 截取边界 (46)3.4.4.3 边界元边界 (49)3.5 初始条件 (50)3.5.1 在均匀介质中的均匀应力:无重力 (50)3.5.2 无节理介质中具有梯度变化的应力:均匀材料 (51)3.5.3 无节理介质中具有梯度变化的应力:非均匀材料 (51)3.5.4 具有非均匀单元的密实模型 (52)3.5.5 随模型变化的初始应力 (53)3.5.6 节理化介质的应力 (54)3.5.7 绘制应力等值线图 (55)3.6 加载与施工模拟 (57)3.7 选择本构模型 (62)3.7.1 变形块体材料模型 (63)3.7.2 节理材料模型 (64)3.7.3 合理模型的选择 (65)3.8 材料性质 (71)3.8.1 岩块性质 (71)3.8.1.1 质量密度 (71)3.8.1.2 基本变形性质 (71)3.8.1.3 基本强度性质 (72)3.8.1.4 峰后效应 (73)3.8.1.5 现场性质参数的外延 (77)3.8.2 节理性质 (80)3.9 提示和建议 (81)3.9.1 节理几何形状的选择 (81)3.9.2 设计模型 (81)3.9.3 检查模型运行时间 (82)3.9.4 对允许时间的影响 (82)3.9.5 单元密度的考虑 (83)3.9.6 检查模型响应 (83)3.9.7 检查块体接触 (83)3.9.8 应用体积模量和剪切模量 (83)3.9.9 选择阻尼 (84)3.9.10 给块体和节理模型指定模型和赋值 (84)3.9.11 避免圆角误差 (85)3.9.12 接触嵌入 (85)3.9.13 非联结块体 (86)3.9.14 初始化变量 (86)3.9.15 确定坍塌荷载 (86)3.9.16 确定安全系数 (86)3.10 解释 (88)3.10.1 不平衡力 (88)3.10.2 块体/网格结点的速度 (88)3.10.3 块体破坏的塑性指标 (89)3.11 模拟方法 (89)3.11.1 有限数据系统模拟 (89)3.11.2 混沌系统的模拟 (90)3.11.3 局部化、物理的不稳定性和应力路径 (91)1 引言1.1 总论通用离散元程序(UDEC,Universal Distinct Element Code)是一个处理不连续介质的二维离散元程序。
动力学分析建模的注意事项
动力学分析建模的注意事项动力学分析是一种研究系统运动、行为和变化的方法。
它可以帮助我们理解系统的行为规律,优化系统设计,预测系统的未来状态。
在进行动力学分析建模时,有一些注意事项需要考虑和遵守。
首先,我们需要明确研究的对象。
对于复杂的系统,我们可以将其分解为多个子系统或组件进行研究。
明确对象的边界和范围有助于建立准确的模型和进行精确的分析。
其次,我们需要选择适当的分析方法。
动力学分析可以基于物理定律、数学模型、统计方法等进行。
根据研究的目标、数据可获得性和所需的分析精度等因素,选择合适的方法进行建模和分析。
在进行实际建模时,我们需要收集系统的相关数据和参数。
数据的质量和准确性对于分析结果的可信度至关重要。
特别是在实际系统中,收集到的数据可能存在误差和不完整性,需要进行适当的数据处理和修正。
建模过程中,我们需要做出一定的假设和简化。
复杂的系统往往具有众多的变量和相互作用,而我们往往无法准确地建立所有的变量和关系的模型。
因此,我们需要在建模过程中做出适当的假设和简化。
同时,我们需要明确假设和简化对分析结果的影响,准确评估模型的适用范围。
对于大型系统,我们可以通过分层建模的方法进行分析。
这意味着我们可以将系统分解为多个层次,每个层次具有不同的特点和性质。
通过对每个层次进行研究和分析,我们可以更好地理解系统的整体行为和局部特征。
在进行动力学分析时,我们需要定量描述系统的行为和变化。
这意味着我们需要将系统的状态和关系转化为数学公式或方程。
在建立数学模型时,我们需要注意合理性和可解性。
模型应该能够反映系统的本质特征,同时也需要具备足够的简洁性和清晰度,以便于分析和应用。
动力学分析建模是一个迭代和逐步深入的过程。
在进行实际建模时,可能会发现模型无法准确描述系统的行为,或者模型的预测结果与实际情况不符。
在这种情况下,我们需要及时进行模型修正和参数调整,不断改进模型的准确性和预测能力。
最后,我们需要合理评估模型和分析的可靠性。
动力学力的分析与计算常见错误解答与纠正方法
动力学力的分析与计算常见错误解答与纠正方法动力学力的分析与计算在物理学和工程学中具有重要的应用价值。
然而,由于其复杂性和理论性,常常会伴随着一些常见的错误。
本文将就动力学力的分析与计算中常见的错误进行解答与纠正,帮助读者正确地理解和应用动力学力。
一、错误一:对动力学力的定义理解不准确动力学力是指物体受到作用力而产生的加速度。
错误的定义理解可能导致力的计算错误,进而影响到后续的动力学分析。
正确的定义应该是:动力学力是物体所受到的,改变物体运动状态的力。
解答与纠正方法:要正确理解动力学力的定义,首先要明确力的本质是物体间相互作用的结果。
另外,要注意区分动力学力和静力学力,动力学力会引起物体的加速度变化,而静力学力则不会产生加速度变化。
在分析动力学问题时,需要准确判断动力学力的方向和大小。
二、错误二:不考虑惯性力的影响在动力学分析中,常常会遇到惯性力的影响。
惯性力是由于参考系的选择而产生的,如果不考虑惯性力,将导致力的计算错误。
解答与纠正方法:在进行动力学力的分析与计算时,要根据所选取的参考系考虑惯性力的影响。
惯性力的计算可以通过运用惯性力公式进行推导和求解。
在实际应用中,要根据具体情况判断是否需要考虑惯性力,合理选择合适的参考系。
三、错误三:未考虑旋转惯量的影响在分析旋转运动时,常常会遇到旋转惯量的影响。
旋转惯量是物体对旋转运动的惯性度量,未考虑旋转惯量将导致力矩的计算错误。
解答与纠正方法:在进行旋转运动的力学分析时,要考虑物体的旋转惯量。
旋转惯量的计算可以通过物体的形状和质量分布进行推导和求解。
在实际应用中,要根据具体情况合理选择旋转惯量的计算方法,并结合力矩公式进行力矩的计算。
四、错误四:力的叠加原理的误用在动力学力的分析与计算中,常常需要将多个力作用于一个物体进行叠加。
然而,错误地使用力的叠加原理将导致力的计算错误。
解答与纠正方法:在使用力的叠加原理时,要明确各个力的作用位置和方向。
正确的叠加原理应该是:分别计算各个力在物体上产生的力矩,然后将各个力矩相加,最后根据力矩和力臂的关系求解合力的大小和方向。
动力系统仿真中的车辆控制技巧与常见问题解答

动力系统仿真中的车辆控制技巧与常见问题解答在汽车工程领域中,动力系统仿真是一项关键技术,它能够对车辆的动力性能、燃油经济性以及排放特性进行评估和优化。
而在动力系统仿真过程中,车辆控制是一个重要的环节,对于保证车辆行驶安全性、提高驾驶舒适性和降低油耗有着至关重要的作用。
本文将介绍车辆控制的一些技巧,并解答一些常见问题。
一、车辆控制技巧1. 车速控制技巧在车辆控制中,常采用PID控制算法对车辆速度进行控制。
PID控制算法是一种没有模型的控制算法,通过调整三个参数来实现对车速的控制。
其中P代表比例控制,I代表积分控制,D代表微分控制。
通过合理的调整PID参数,可以使得车辆速度保持在目标设定值上。
2. 制动力分配技巧制动力分配是指将制动力合理分配给各个车轮,以实现车辆的稳定制动和转向。
在动力系统仿真中,常使用最大刹车力比例规律对制动力进行分配。
根据车辆加速度、倾斜角度以及车辆质量等参数,通过计算得到制动力分配系数,从而实现最佳制动效果。
3. 扭矩控制技巧扭矩控制是动力系统仿真中的关键技术之一,它能够保证驾驶员的需求得到满足,并且提高发动机的燃油经济性。
在车辆控制中,常使用基于油门和刹车踏板位置的扭矩控制策略,通过调整扭矩输出,使得车辆在不同工况下具有较好的动力响应和燃油经济性。
4. 扭矩分配技巧在四驱和多驱动模式的车辆中,扭矩分配是一项重要的技术。
通过智能型扭矩分配系统,可以根据车辆的工况和驾驶员的需求,合理分配扭矩给各个驱动轮。
这样可以提高车辆的操控性和稳定性。
二、常见问题解答1. 如何进行车辆控制系统的建模?建模是进行动力系统仿真的关键步骤。
在车辆控制系统的建模中,需要对车辆的动力学特性、控制算法以及传感器等进行详细的描述。
常用的建模软件有Simulink和CarSim等,通过搭建模型和输入相应参数,可以实现车辆控制系统的建模。
2. 如何调整控制算法中的参数?调整控制算法参数需要充分理解车辆的控制策略和控制环节。
动力学分析建模的注意事项
动力学分析建模的注意事项在现代机械工程中,大多数复杂的动力学分析问题都是建立在结构固有状态的基础上。
它是建立在多参数理论基础之上的。
当存在不同输入变量时,就需要采用不同的动力学模型。
建模中通常采用输入变量(初始条件)、输出变量(过程条件)、求解变量(求解条件)等方法。
此外还需要考虑模型的适用性问题。
如在有限元分析中采用多体动力学模型中比较多地使用了有限元的方法来研究系统的全局行为。
在有限元分析中由于模型各输入变量之间的差异(通常是动态过程)引起的局部应变分布现象(通常是局部特征分布)而造成了局部应力梯度出现的现象。
如果这种局部应变分布与实际结构振动及动力学参数密切相关的话则更需要建立一种多体动力学模型加以分析了。
1、在建立建模之前,应仔细分析输入变量的空间位置,以便计算出结构振动和动力学参数。
如果输入变量(初始条件)在实际中很难确定,则可以利用局部弹性模函数求解变量(求解条件)。
当初始过程中涉及到输入变量时,就要尽量将输入变量选择不敏感于此,使输入变量满足约束条件时,才能应用模型求解。
同时,输入变量所处的空间位置也是求解问题解决的重要因素之一,它与系统动力学模型相联系,因此应十分注意这个问题。
但这种分析只适用于结构固有特性良好且结构允许通过改变参数来补偿系统行为时所采用的有限元分析方式。
如可在考虑结构各参量空间位置之差求解变量(求解条件)时,可将输入变量换成输出变量,如将输出变量换成其他参量等,以避免模型分析时采用某些单一输入变量来求解同一输入变量时获得不同参量所造成数据误差。
当输入变量与实际系统之间发生变化时,应考虑不同参量在系统间产生梯度现象(也称为局部应变梯度现象),以便考虑局部应力梯度分布与实际结构振动及动力学参数(如几何参数)之间关系。
一般来讲,当输入变量在实际系统中并不明显时,则可考虑采用与模型近似水平、倾斜、偏心或静止相等特征值较小(较多)时用于模型分析的参数去处理;当输入变量对实际系统影响较大时,则应在建立初期对其进行充分而详细的分析,以求出更合理地估计参数之间可能发生的变化关系。
摩托车动力性的理论计算方法及应注意的问题
摩托车动力性的理论计算方法及应注意的问题
胡广华
【期刊名称】《摩托车技术》
【年(卷),期】1989(000)002
【总页数】2页(P25-26)
【作者】胡广华
【作者单位】无
【正文语种】中文
【中图分类】U483
【相关文献】
1.学习拆装摩托车发动机应注意的问题 [J], 李天照
2.摩托车动力性的计算方法及应注意的问题 [J], 胡广华
3.摩托车采用直流点火应注意的问题及解决措施 [J], 李志豪
4.更换本田VFR-400R-NC30型摩托车发动机活塞环应注意的问题 [J], 马喜发
5.学习拆装摩托车发动机应注意的问题 [J], 李天照;
因版权原因,仅展示原文概要,查看原文内容请购买。
直流系统计算注意事项
直流系统计算注意事项
1. 电流方向:直流系统中电流方向是恒定的,所以在计算时,需要明确电流的方向,并按照相应的方向规则进行计算。
2. 电阻的计算:直流电流通过电阻时,根据欧姆定律,电阻上的电压与通过电阻的电流成正比。
因此,在计算中需要正确地确定电阻的数值,并根据电流大小计算电阻上的电压。
3. 链路的串并联:直流系统中,多个电阻、电源等元件可以串联或并联连接。
在计算时,需要根据实际电路的连接方式,采用串联或并联的计算方法。
4. 功率的计算:直流系统中,电阻消耗的功率可以用电流和电压的乘积来计算。
同时,在电源供电时,也需要考虑电源输出的功率。
5. 电源电压的稳定性:直流系统中,电源电压的稳定性对于整个系统的正常运行非常重要。
在计算中,需要考虑电源电压的稳定性对系统参数的影响。
6. 线路的功耗:直流电流在导线中会有一定的功耗,这是由于导线的电阻造成的。
在系统计算中,需要考虑导线功耗对系统的影响,特别是在长距离线路中。
综上所述,直流系统计算需要注意电流方向、电阻的计算、串并联的连接方式、功率的计算、电源电压稳定性和线路的功耗
等因素。
这些注意事项的正确考虑,能够保证直流系统的可靠计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刚度选取
模型中块体材料与节理材料的刚度或性质反差较大或者块体尺寸存在较大差异,UDEC 将需要运行很长时间才收敛。
节理法向和切向刚度的力学计算应小于10倍节理毗邻单元的等效刚度。
即
n k 和s k ⎥⎦⎤⎢⎣
⎡⎥⎦⎤⎢⎣⎡∆+≤min )3/4(max 0.10z G K (3.37) 式中,K 和G 分别是块体材料的体积模量和剪切模量;min z ∆是毗邻节理单元在法线方向的最小宽度。
如果节理刚度大于10倍等效刚度,则模型求解时间将明显大于其刚度比限制在10以内的情况。
在另一方面,如果法向刚度,n k 很低,还可能存在问题。
应对模型代表性应力所产生的节理法向位移有一个大致的估计(n k u /σ=)。
该位移与代表性的单元尺寸相比是小的。
如果该值大于毗邻单元尺寸的10%左右,则一个单元存在错误或刚度应提高。
网格划分
UDEC 在计算中,网格单元的尺寸对计算结果有很大影响。
一般而言,网格单元的尺寸越小,计算精度越高,但会占用更多的内存和消耗更多的计算时间。
一般将块体切割成大量的有限差分三角形网格单元,网格单元的尺寸应不大于波长的1/8~/10。
边界条件设置 UDEC 动力计算分析中,计算模型的边界计算模型的区域边界可能引起向外传播波的反射回模型和不允许必要的能量辐射。
当模型的尺寸足够大的时候,材料阻尼将吸收大部分从边界处反射回来的能量,从而最小化消除影响。
然而,大尺寸的模型会增大计算负担。
为了解决这个问题,Lysmer 和Kuhlemeyer(1969)开发了粘性边界,通过在边界的法向和切向设置减震器来吸收能量。
减震器提供的反向力为:
n p n v C t ρ-=
s s s v C t ρ-=
式中,n t 为法向反力(Pa);s t 为切向反力(Pa);ρ为介质的密度(kg/m 3);p C 为应力波在介质中传播的纵波波速(m/s);s C 为应力波在介质中传播的横波波速(m/s);n v 边界质点的法向震动速度(m/s);s v 为边界质点的切向振动速度(m/s)。
ρ/)4(G K C p +=
,ρ/G C s =。
K 为体积模量(Pa),G 为切向模量(Pa),ρ为介质的密度(kg/m 3)。