浅谈航空影像空三加密技术流程
[数字摄影,精度,空三]数字摄影测量空三加密的精度控制及应用研究
![[数字摄影,精度,空三]数字摄影测量空三加密的精度控制及应用研究](https://img.taocdn.com/s3/m/15ccdc11bb4cf7ec4bfed0d0.png)
数字摄影测量空三加密的精度控制及应用研究摘要:空三加密是数字摄影测量过程中的一道重要工序。
空三加密的精度高低和速度快慢直接影响整个作业的精度和进程,因此在整个过程中要注意每一个环节,保证精度。
为了保证作业过程中的精度,就需要制定出一套切实可行的作业方法。
针对自动空中三角测量作业流程中存在的一些问题,笔者结合适普软件公司研发的自动空三加密软件Virtuozo-AAT及具体数据进行实际的操作练习,探索出一套切实可行、可靠、快捷的空三加密方法以及作业中的精度保障措施,进一步提高内业加密速度、加密精度。
关键词:数字摄影测量;空三加密;精度分析;AATM/PATB系统1 自动空三加密模块介绍VirtuoZo全数字摄影测量系统的影像配准算法具有可靠、快速和精确的优点。
其中的自动空三量测(AAT)模块除半自动量测控制点之外,其他所有作业包括内定向、选取加密点、加密点转点、相对定向、模型连接和生成整个测区像点网都可以自动完成。
主要功能:1)自动内定向:自动识别影像框标以及计算内定向参数。
2)自动生成稳定的、可靠的测区像点网。
3)完全支持PATB的各项平差功能,如相机自检校法补偿系统误差和GPS参数联合平差等,可以实现高精度的区域网平差。
2 空三加密的原理空中三角测量主要是利用VirtuoZo全数字摄影测量系统来实现,VirtuoZo的影像配准算法具有可靠,快速和精确的优点。
其中的自动空三测量模块除半自动测量控制点之外。
其他所有作业(包括内定向,选取加密点,加密点转点,相对定向,模型连接和生成整个测区像点网)都可以自动完成。
3 空三加密的作业流程空中三角测量是摄影测量生产中的关键步骤。
它是将建立的投影光束,单元模型和航带模型以至区域模型的数学模型,根据少量地面控制点,按最小二乘法原理进行平差,解求出各加密点的地面坐标。
3.1 数据准备主要完成影像格式转换,创建测区,创建影像列表和内定向三部分工作,为构网平差提供基础。
无人机航空影像空三加密流程
无人机航空影像数据处理流程中国测绘科学研究院北京东方道迩信息技术有限责任公司目录1、无人机航空影像数据处理流程 (3)2、无人机航空影像数据要求 (4)3、无人机航空影像数据空三加密流程 (5)3.1畸变差校正 (5)3.2建立测区工程 (7)3.3.1工程目录及相机检校文件设置 (8)3.3.2设置航空影像数据 (10)3.3.3设置控制点数据 (14)3.3空三加密 (15)3.4.1数据预处理 (16)3.4.2航带初始点提取 (19)3.4.3自动相对定向及修改 (21)3.4.4自由网平差 (31)3.4.5控制点提取及区域网平差 (35)4、DEM与DOM制作 (37)4.1 DEM匹配及编辑修改 (37)4.1.1工程及格式转换 (37)4.1.2核线影像生成及DEM匹配 (40)4.1.3 DEM编辑修改 (46)4.2 DOM纠正及分幅 (52)4.3.1 DOM纠正及拼接 (52)4.3.2 DOM分幅 (60)1、无人机航空影像数据处理流程高分辨率遥感影像一体化测图系统PixelGrid作为卫星影像数据处理的能力和效率在生产过程中已经得到了很好的验证,其数据适用范围之广、处理效率之高在国内都是其它同类软件无法比拟的。
无人机航空摄影是一种新型的航空影像数据获取方式,由于无人机种类不同以及所搭配的相机不同,其获取数据的质量也不相同,PixelGrid针对国内测绘部分中低空领域普及的无人机航空拍摄数据,提供了高效快速的处理。
其无人机航空影像作业流程图如下:图1-1 无人机航空影像处理流程2、无人机航空影像数据要求对于无人机数据的处理需求必要的一些文件。
其中包括原始影像数据、相机检校文件、控制资料、航线结合表(航线索引图,包括飞行信息)等。
原始数据格式可以为JPG、BMP、TIF等;相机检校文件包括:相机像主点坐标、相机焦距、像元大小、径向畸变差系数(K1、K2)、切向畸变差系数(P1、P2)、CCD非正方形比例系数α、CCD非正交性的畸变系数β、像方坐标系等(其单位为像素或毫米)。
铁路航测中ORIMA空三加密浅析

③在新增方案改变 了原铁路中线航测制图范围的 时候 , 通过 空 三加 密 的方 式在 野 外 控 制 测 量 网 的 控 制
范 围 内增 加 新 的 加 密 点 , 代 野 外 控 制 测 量 的 补 测 替 工作 。
3 如何提高空三加密的精度
作用 :
数字摄影测量工作站上的一个平差软件模块 。其工作 流 程如 图 l 示 。 所
①把大量的野外控制测量工作转移到了室 内, 提 高 了外业 工作 效率 , 短 了航 测 成 图的时 间 。 缩 ②在 航摄 像 片 与外 业 控 制 测 量 的 时 间 段 不 匹 配
时, 通过 空三加 密来 内业 判别 点位 并剔 出错 点 , 补充有 效加 密点 , 现野外 控 制测量 中解 决不 了的难题 。 实
Bre ay i n O RI A ra i n u a in ifAn l sso M Ae i lTra g lto i iwa ra u v y n Ral y Ae i lS r e
L IJ a E u n
摘
要
介绍 O I A加密软件在铁路航测 中的关键作用, RM 简述 了该软件的使用步骤 , 认为影 响空
区域 网 网段 的布 置 结 构 、 航带 问模 型 连接 点 的视 差、 作业员 的立 体经验 、 外控 错点 的准确 排 除对 加 密成 果 精度 都有很 大影 响 。下面 以四个不 同作业 员对 同一 网段加 密学 习的实 例来说 明 。
资料 内容 :
制超出外控范围的地面高程 , 保证整个 网段陆地高程 为正值。 山区: 山区进行加密的时候 , 对 由于海拔太高 , 投
原 因分 析如表 2所示 。
航摄影像空三加密相关问题分析
5 4・
Байду номын сангаас科 技 论 坛
航摄影像 空三加密相关 问题 分析
李向锋 ( 新疆维吾 尔自治 区第- - ̄ 1 , 绘院, 新疆 昌吉 8 3 1 1 0 0 ) 摘 要: 航 空摄 影测量在 各行 业 中均有 重要 应用, 主要可分 为量 测摄 影测量及判释摄影 测量。空三加 密是航 空摄 影测量 的重要 手段 之一, 因此详述 了空三加密的有关问题 , 分析其在航 空摄影测量 中的主要应用 , 以期为相关从 业人 员提供 借鉴。 关键词 : 航摄影像 ; 空 三加 密 问题 ; 分 析 航 空摄影测量是一 门具有重要应用 意义 的应 用方法 , 能够在较 利用测 区 中影像 连接点 ( 加密点 ) 的像点 坐标和少 量 的 已知像 大区域 内完成摄影及测量等工作 。 航空摄影测量相对于其他测量手 点坐标及 其大地坐标 的地面控制 点 , 通过平差 计算 , 求解 连接 点的 段 的一个重要优点就是能在较短时间 内做出精确测量 。 这也是航空 大地坐标与影像的外方位元素 , 称为 区域 网空中三角测量 。区域 网 摄影测量技术 应用十分广泛 的一个重要原 因 , 例 如绘制地 图 , 观察 空 中三角测量提供 的平差结果 是后续 的一系列摄 影测量 处理 与应 地貌 , 制作工程图等 , 均需要航空摄影测量 的帮助 , 除此 之外还有许 用的基础 。区域网空 中三角测量按平 差单元可分 为航 带法 、 独立模 多评估 及绘 制等工作均用 到了航空摄影测量 。 型法和光束法 , 其 中光束法理论最严密 、 解算精度最 高。 成为空三测 以每 张像片为单 在以前 ,航 空摄影测量 主要是 通过解析制图完成测绘工作 的 , 量的主流方法 。光束法 区域 网平 差的基本思想 是 , 现如今 , 数字化 时代 的到来 为人们 带来 了诸 多机遇 , 现如今社会 正 元 , 区域内每张像 片的控制点 、 加 密点都列立共线条 件方程式 , 建立 处于高速发展状 态 , 各行业更新 、 优化速 度十分迅速 , 同时社会的发 全 区域 统一 的误差 方程 , 统一平差 解算 , 整体解 求区域 内每 张像片 展推动 了科技的进步 , 因此航空摄影测量也完成 了从解 析制 图发展 的 6个外方位元素及所有加密点 的地 面坐标 。A A T Ma t r i x单个测 区 为数值制图的过程。所谓数值制 图 , 就是应用计算 机技 术的一种更 工作流程如下 : 为先进 的制图手段 , 这种制 图方法使得制 图更 加精确 , 同时处理起 2 . 1 新建测区 。新建一个测 区或打开一个 已存在 的测 区。 来更加方便快捷 。简要来 说 , 数值制 图主要是 将所 获取 的影像传输 2 . 2测区参数设置 并存储 于计 算机 中 , 而计算 机对于大数据 的运算 十分智 能 , 结合相 a 测 区参 数设 置 , 包括摄影 比例尺 , 测区编号 , 以及相机类 型等 。 关运算 技术即可完成数 据的处理工作 , 一般 来说 , 航空摄影 测量所 b . 相机参数 的导人 , 注意相机 文件的路径 。c . 影 像的导人 , 设置航带 应用 的相关技术 主要 为正射像片制作 、 空中三角测量 、 影像 匹配及 数及 添加影像 并且对像 素大小 , 相机参数 , 相 机是否 反转 等进行 设 相关数学模型 。 置。 c . 控 制点导人 , 注意 P A T B不支持带字母 的控制点格式 并且注意 1航空摄影测量 的空三加密技术 路径 ( 或G P S / I MU参数 的导人 , 注意线元素和角元素的顺序关 系 ) 。 空三加密技术是航空摄影测量 中的一项重要 技术 , 能够对 空 中 2 . 3 操作步骤 三角测量所得数据实现解析 , 主要是通过一定 的解析方法完 成外方 a . 内定 向 , 包括手工量测 和 自动量测 两种方 式 。b . 航带 连接 , 通 位元素 的确定工作 。通常来说 , 空三加密是通过一些 已知 坐标 点来 过相邻航带问的航带连接点确定航带 间的连接关 系 , 为后期航 带间 确 定未知坐标 点 , 当已知坐标点数量 达到要求后 , 即可 利用这些 坐 转点提供初值 ( 如果是 G P S 辅 助空三 , 不 需要做航带 连接 ) 。c 动 标 点获取影像 的外方位元素 , 一般情况下 已知坐标 点数 量应满足至 提取 , 通过 相对定 向确定 航带 内相 临影像之 间相对 位置关 系 , 以及 少 四个 的要 求。空三加密也正是 由此得 名 , 因为这些 坐标点是逐渐 由公共连 接点来确定相对定 向模 型 。d . 自动选 点 , 按 照设定 的分布 获取 、 积 累的, 数 量上 的增加使得这个技术被称作空三加密技术 。 方式 , 删除误差 比较 大的点 , 保 留精度 较好 的点 。e . 交互 编辑 , 添加 想要 了解航 空摄影测量技术 ,首先就 要对其含 义进行 简要介 控制点检测并编辑粗差点 , 并通过少量 地面控制点 的坐标 来解算待 绍。有学者指出 , 航空摄影测量 只利用摄影器材 所获取到的影像材 定点 的坐标 。f . 生成加密点 , 解算 出待 定点坐标 , 并输 出成果 。 料, 这种器材 十分精密 , 同时它是被置 于各 飞行器上 的。 航空摄影测 近来 , 很多学者在空 中二 三角测量 中利用 G P S数 据可 以达 到什 量所得数据素材的用途主要可 分为以下两个方面 : 量测摄影测量及 么样 的预期精度和可靠 性进行 了广泛 的研究 ,使得 G P S辅助空 三 目前 的研 究结果表 明 : a . G P S摄站坐标在 区域 网 判释摄影测量。 其中 , 量测摄影测量主要是指对各个数据进行测量 , 的应 用越 来越 广泛 。 例如面积 、 体积 、 形状等 。而判释摄影测量主要是对地貌 、 土地使 用 联合平差 中是 极其 有效 的 , 只需要 中等精度 的 G P S数据 即可满足测 等情况进行描述 。 图的要求 , b . 夕 方位线元素 的利用 一般 比角元 素更有 效。但是 附加 但是需要注意 的是 , 以前 的航空 摄影 测量对于像 片的依 赖性 十 的姿态测盛 , 在精度要求很高 时可 以用来改善高程加密精度 。c . 利 分强 , 不论是 已知坐标 点 、 未知坐标点还是方位 的判 断 , 都有 赖于像 用 G P S数据的光束法区域网平差将会有较好 的可靠性 , 这包括 G P S 片, 不论哪个因素出现问题 , 都会严重破坏像 片 , 因此风 险极 大 。除 数据 自身的可靠性 ,像点坐标观测 值和少量地面控 制点的可靠 性。 原 则上讲 , G P S提供 的摄站坐标 用于平差 可以完全 收代地 面控 制 此之外 , 相关工作 人员尤其 是测 图员的技术水平对于像 片的影响也 d 条件是 G P S观测值在 区域网 中必须连续 而没有 中断 。e . 为 了解 较大, 如果测图员的专业水 平不 过关 , 也很有 可能造成像片 的损坏 , 点, 由此 可见 , 传统 的航空摄影测量存在着较为严重 的弊端 。而利用计 决基 准问题 , 即为 了获 得 国家 坐标 系( 如高斯 . 克 吕格 坐标 系 ) 的加 依 然要 求有 一定的地面控制 点。但 是控制点数 远远少于 常 算 机可快速处 理大量运算 之特点 , 可将传统摄影 测量相对 、 绝 对方 密成果 , 位判定 、 空 中三角测量 、 建立数值地形模 型 、 建立正射影 像及立体观 规加密所需 的控制点数 。 3 结 论 察量测等 工作 在计算机 上运算处理 。另 外 由于相关 技术 的不断进 般 只在 测 区的角 上布设平高控 制点 即可。 由此 可见 , G P S定 步, 需投入人力 的部分将愈来愈少 , 这也是数值航摄 的一大优点 。 2 航 摄 影 像 空 三 加 密 相 关 问 题 分 析 位数 据和 I N S惯性 导航数据在 空三 中的应用 已 日益 受到人 们 的关 A e r o M a t r i x 同样 提供 了使用 G P S 和I N S 数 据进行 自动转点 和联 依据光线是一 直线 轨迹之原 理 ,故摄影机透视 中心 与像 空间 、 注 , 合平差 的功 能。 物空间的点形 成共线关 系。在摄影 机透视 中心位置 已知 的情 况下 , 利用两张或以上之像 片 , 其光束互相交会之原 理。应用前方交会原 参 考 文 献 1 1 张森. A D S 8 0数 字 航 空摄 影 测 量 立 体 测 图 高 程 精 度 分 析 【 J I . 测 绘 理, 将 已知摄影站 的方位参数 的空 间共线式代 入所量测的共轭像点 『 的像 片坐标 , 即可求得对应 的地面点 三度 空间坐标 。当利用地面控 与 空 间 地 理信 息 , 2 0 1 2 , S 1 : 1 2 5 - 1 2 6 . 2 1 杨 如华 , 朱 玉云. P O S辅 助空 中三 角测 量 中野 外像 控点 的位 置和 制点的多余观测 , 以最小二乘法计算 出每 一摄 影站的外方位六参数 『 之最或是值。利用两 已知外方位参数 的摄影站 , 即可采前方交会法 数量对精度的影响分析[ J 】 . 矿 山测量 , 2 0 1 2 , 1 : 5 ��
无人机航空测绘及后期制作课件:ContextCapture倾斜摄影测量数据处理流程--空三加密

ContextCapture空三加密 第一次空三加密
• 空中三角测量计算报告 单击查看空中三角测量计算报告,该报告将显示空中 三角测量计算的主要属性和统计
ContextCapture空三加密 第一次空三加密
• 自动连接点检查 连接点对应于两幅或多幅不同影像中的像素,这些像素 表示同一物理点在场景中的投影。在空中三角测量计算 过程中,ContextCapture可以自动生成大量自动连接点 • 可以从自动连接点导航器中检查自动连接点,从而执
ContextCapture 倾斜摄影测量数据处理
流程--空三加密
ContextCapture倾斜摄影测 量数据处理流程--空三加密
一、ContextCapture空三加密
二、导入像控点并进行刺点
ContextCapture空三加密
ContextCapture空三加密 第一次空三加密
要基于影像执行三维重建,ContextCapture必须准确地 掌握每个输入影像组的影像组属性及每个输入影像的姿态 ContextCapture可以通过名为“空中三角测量计算” (有时简称为AT)的过程自动进行估算
ContextCapture空三加密 第一次空三加密
④设置:选择空中三角测量估算方法和高级设置
ContextCapture空三加密 第一次空三加密
• 关键点密度 可以更改关键点密度值来管理特定数据集: 普通:建议用于大部分数据集 高:增加关键点的数量,建议用于纹理不足的物体或 小影像,以匹配更多影像
ContextCapture空三加密 第一次空三加密
• 像对选择模式 可以使用不同的选择算法计算连接点对: 默认值:应根据多个条件进行选择 仅限类似影像:根据关键点相似度估算相关像对 详细:使用所有可能的像对,建议在影像之间的重叠 有限时使用 序列:仅使用给定距离内的邻近对,影像插入顺序须 对应于序列顺序 循环:仅使用循环中给定距离内的邻近对
浅谈无人机航空摄影测量空三加密精度分析

制点布设在中央区域以及测量区域的四角出,共计约5个,通过这种方式保证能够在进行多余观测,并及时发现粗差等基础上,还可以出色完成比例是1:2000地形图的绘制工作[2]。
2.3 布设像控点一般情况下,区域网法是当前像控点最为常见的一种布设方案,在这一方法中航向的间隔为4条基线。
这一项目的像控点借助GPS-RTK进行施测,同时根据平高点具体的要求来布设像控点。
通常布设的范围处于航向重叠3片区域中,而当于区域网内布点时则需要确保5至6片的重叠;另外,像控点和相片边缘之间的距离应当处于1.5cm及以上。
3 对空三加密精度的分析就当前航空摄影测量基本的流程来看,在航测工作中空三加密技术有着极为重要的作用,它直接决定着最终地籍图的精度。
在目前科学技术快速发展的过程中,航测工作的时间愈发紧张,对应的任务量也在随之增加,而借助空三加密相关的软件,则能够迅速且高效的完成各项加密工作。
在布设传统外业像控点时,控制点的点位位置往往需要进行谨慎考虑,通常对其有着极为严格的要求。
因此,是否能够有效脱离目前外业像控布点工作中的种种限制,从而有效减少控制点实际的布设量,进而在不影响测量区域加密精度的前提下有效提升航线跨度,逐渐成为当前管理人员急需去考虑的一个问题。
4 优化无人机航空摄影测量空三加密精度的方法文章将无人机航空摄影测量空三加密的实际流程作为了切入点,借此来对其进行了深入分析,并对技术的优化方案作了全面研究。
过去传统无人机的空三加密具体流程如图1所示。
图1传统无人机航空摄影测量的空三加密流程因为非量测相机是无人机获取影像最为重要的一个途径,所以只有在畸变差校正等工作结束后才能够进行空三加密,另外在此环节还需要对相机的参数进行全面检校,倘若直接跳过这一环节那么很有可能会对匹配的精度产生不利影响。
但是,0 引言由于科学技术不断进步,当前无人机航空摄影测量技术在许多项目的生产工作中实现了广泛的应用,怎样才能实现对海量的无人机信息数据进行高效化处理,以此确保航空摄影测量成图的准确程度,已经成为现阶段航空摄影测量进一步发展所面临的主要问题。
航测无人机空中三角测量及加密
航测无人机空中三角测量及加密(空三)解析空中三角测量指的是用摄影测量解析法确定区域内所有影像的外方位元素。
在传统摄影测量中,这是通过对点位进行测定来实现的,即根据影像上量测的像点坐标及少量控制点的大地坐标,求出未知点的大地坐标,使得已知点增加到每个模型中不少于4个,然后利用这些已知点求解影像的外方位元素,因而解析空中三角测量也称摄影测量加密或者空三加密。
1、光束法空中三角测量光束法区域网空中三角测量是以一张像片组成的一束光线作为平差的基本单元,是以中心投影的共线方程作为平差的基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共点的光线实现最佳交会,并使整个区域最佳地纳入到已知的控制点坐标系统中去,以相邻像片公共交会点坐标相等、控制点的内业坐标与已知的外业坐标相等为条件,列出控制点和加密点的误差方程式,进行全区域的统一平差计算,求解出每张像片的外方位元素和加密点的地面坐标,见图1:图1 光束法区域网平差对于目前全自动处理的空三软件,一般是利用影像自动匹配出航向和旁向的像点,将全区域中各航带网纳入到比例尺统一的坐标系统中,拼成一个松散的区域网,确认每张像片的外方位元素和地面点坐标的概略位置,然后根据外业控制点,逐点建立误差方程式和改化法方程式,求解出每张像片的外方位元素和加密点的地面坐标。
在获得每张像片的外方位元素和加密点地面坐标的近似值后,就可以用共线条件方程式,列出每张像片上控制点和加密点的误差方程式。
对每个像点可列出下列两条关系式,即:图2式中:图3对于外业控制点,如果不考虑它的误差,则控制点的坐标改正数dX=dY=dZ=0。
当像点坐标为等权观测时,误差方程式对应的法方程式为:图3公式图3含有像片外方位元素改正数X和待定点地面坐标改正数t两类未知数。
对于一个区域来说,通常会有几条、十几条甚至几十条航带,像片数将有几十、几百甚至几千张。
每张像片有6个未知数,一个待定点有3个未知数。
如若全区有N条航带,每个航带有n张像片,全区有m个待定点,则该区域的末知数为6n X N+3m个。
DMC航摄影像空三加密的实验研究
DMC航摄影像空三加密的实验研究文章分析了DMC数字航摄影仪以及影像特点,并以某市的土地利用更新调查项目为例,探析了DMC航摄影像空三加密的试验研究,以供参考。
标签:DMC航摄影像空三加密试验研究1 DMC数字航摄影仪MC数字航摄影仪与传统航空摄影方式相比,具有影像清晰、成本低、效率高、航片信息丰富、不用胶片等众多优点,深受摄影测量工作者的青睐。
DMC 数字航摄影仪是一个高精度、高分辨率的数字航空摄影系统,其能够完成大比例尺与小比例尺的航空摄影测量和航摄工作,并且在恶劣的气候条件下,能够以不同的曝光时间在不同的光线条件下进行曝光,有效的解决了传统航摄方式在恶劣天气条件下不能航空摄影的问题。
同时,DMC数字航摄影仪具有:获取影像数据周期短、效率高、成本低、速度快;取得的航片信息丰富、精度高;像素变小,提高地面分辨率;影像不用胶片、扫描以及冲洗等优点,由此可见DMC数字航摄影仪是用于完成高分辨率、高精度航空摄影测量任务的数字航空摄影系统。
2 DMC航摄影像空三加密的试验研究(1)试验内容文章以某市为例,该市新一轮的土地利用更新调查项目中,为了能够获得地区色彩丰富、现势性强的航摄资料,决定采用当前最先进的DMC数字航摄影仪进行航空摄影。
但是,DMC数字航摄影仪在土地利用更新调查中的实践应用没有现成的经验供借鉴,为了能够有效的降低工作难度和工作量,文章以100km2范围作为实验区,该实验区内的地形包括丘陵地、平地等,试验选择了7条航线,通过对实验区进行研究以及试验,对各种空三家里方案以及结果进行了研究,获得了最佳的作业方案,有效的节约了生产成本、提高生产效率和降低工作强度。
(2)空三加密技术方案通过对整个航测流程进行分析,空三加密方案对地籍图精度的影响是航测中的关键环节之一,新一轮的土地利用更新调查项目中,任务量大、时间紧迫,采用空三加密软件,能够显著的提高加密效率,尽快的完成加密任务。
传统的外业像控布点对控制点的位置要求相对较高,如控制点应该根据航摄比例尺、成图比例尺等进行紧密相连,每3条航线的中间航线加布高程点,每5条基线布设一个平高点,增大航线之间的跨度,降低控制点的数量,是否能够打破该种格局,同时不影响加密的精度,成为文章研究的主要课题。
浅谈无人机航空摄影测量空三加密精度分析
浅谈无人机航空摄影测量空三加密精度分析作者:李文昌来源:《名城绘》2020年第10期摘要:随着社会的发展,我国的测绘工程建设的发展也有了改善。
借助全数字化的摄影测量系统实行空三加密技术有着高度自动化等诸多特点,其目前也得到了工作站当中各个部门的广泛应用,就现阶段的应用情况来看,它已经使得相关工作效率得到了显著提升。
为此,文章就对当前无人机航空摄影测量空三加密技术的应用现状进行了深入分析,同时阐述了其生产的流程,希望借此可以使空三加密技术的精度得到进一步提升。
关键词:无人机航空摄影测量;空三加密;精度分析1 无人机航空摄影测量空三加密的阐述实际上空三加密就是空中三角测量,该技术能够借助极少的控制点物方还有像方坐标,求出未知点具体的坐标,并以此使得模型之中已知点的数量能够提升至四个乃至更多,同时通过上述已知点还可以进一步分析与研究位于影像外方向上的各种元素。
倘若空三加密精度达不到标准,那么便极有可能会出现航空摄影测量外业像控点的量测以及航飞环节被迫返工等情况,从而导致航空摄影测量内业的后续流程无法正常进行。
相较于传统的航空摄影测量,应用无人机进行航空摄影测量所需要投入的成本较少,并且时效性也要更强,其近些年在绘制地形图以及三维建模等工作当中得到了极为广泛的运用。
然而,凡事皆有弊端,该技术同样也不例外,例如影像畸变较大、姿态的稳定性不够以及基高比偏小、高程的精度较低与模型的切换过于频繁等等。
当前我国市场上还未出现一款可以完全解决上述所有问题的无人机航空摄影测量空三加密软件,现有的精度几乎无法满足我国传统航测的标准与要求。
2 数据与研究方法2.1 数据获取首先,选取了图书馆侧面的拐点,道路交叉点等20个控制点,然后使用DronesMap软件进行航线设计,通过全景图查看收藏位置并获取实景图,预览最佳航拍点。
飞行前设定相关参数,保证有效的航向和旁向重叠,旁向重叠度设置为15%—60%,最小不小于8%,航向重叠度设置为60%—80%,最小不应小于53%。
cc空三加密操作流程
cc空三加密操作流程
CC空三加密是一种常见的对称加密算法,下面是其操作流程的详细解释:
1. 密钥生成,首先需要生成一个密钥,该密钥用于加密和解密数据。
密钥的生成可以使用伪随机数生成器来产生一个足够安全的随机数。
2. 明文准备,选择待加密的明文数据。
明文可以是任意长度的二进制数据。
3. 分组处理,将明文按照固定长度的分组进行处理。
通常情况下,每个分组的长度为64位或128位。
4. 初始置换,对每个分组进行初始置换。
初始置换是通过将分组中的位按照特定的规则进行重新排列来实现的。
5. 轮函数,对每个分组执行一系列的轮函数操作。
轮函数通常包括置换、代换、异或等操作,这些操作的次数和顺序由具体的加密算法决定。
6. 密文生成,经过多轮的轮函数操作后,最后得到加密后的密文数据。
7. 密文输出,将加密后的密文输出,用于传输或存储等需要保密的场景。
总结起来,CC空三加密的操作流程包括密钥生成、明文准备、分组处理、初始置换、轮函数操作和密文输出等步骤。
这个流程保证了数据的机密性,并且可以通过相同的密钥进行解密操作。
航摄影像空三加密的若干问题探讨

航摄影像空三加密的若干问题探讨航空摄影测量可调查大范围地区,具有快速、精确等优点,各界早已广泛利用航摄数据测绘、编修地形图、工程图等,亦有利用航摄数据辅助分析地质、森林、工程、环境评估、土地利用变迁等。
而目前航空摄影测量已从过去的解析制图进入数值制图,即将摄影所得的数据,利用扫描将像片转换成数值数据,储存于计算机,利用计算机大量运算的特性,将空中三角测量、影像匹配、数值高程模型(DEM)和正射像片制作等工作交由计算机来处理[1]。
一、航空摄影测量的相关技术空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。
早期摄影测量主要应用于测制地形图、编辑地图;之后则有用于地面控制加密及运输路线、管线设计规划、都市更新计划等。
另外在地质、土壤、森林、区域规划等非工程方面亦有广泛之应用。
航空摄影测量是指利用精密之摄影机置于飞行载具上所拍摄之航摄像片,作为摄影测量研究之对象(何维信,1995)。
利用这种方式拍摄之航摄像片,一般来说有两种用途,一为量测摄影测量(Metric Photogrammetry),一为判释摄影测量(Interpretative Photogrammetry)。
量測摄影测量包括像点之精密量测、求取像点间之距离、角度、面积、高程及物体之形状和大小等信息。
判释摄影测量则是利用像片上所提供之信息,通过以了解土地利用、自然生态等情形。
过去传统的航空摄影测量,是利用摄影后之正片或负片(以下通称为像片),在上面进行量测或判释之工作,通过相关仪器之辅助,从选取控制点,相对、绝对方位判定,空中三角测量,一直到测定未知点之位置,上述之工作皆利用像片来完成,因此对像片本身易造成无法挽救之破坏[2]。
传统胶片航摄影像空三加密关键技术研究
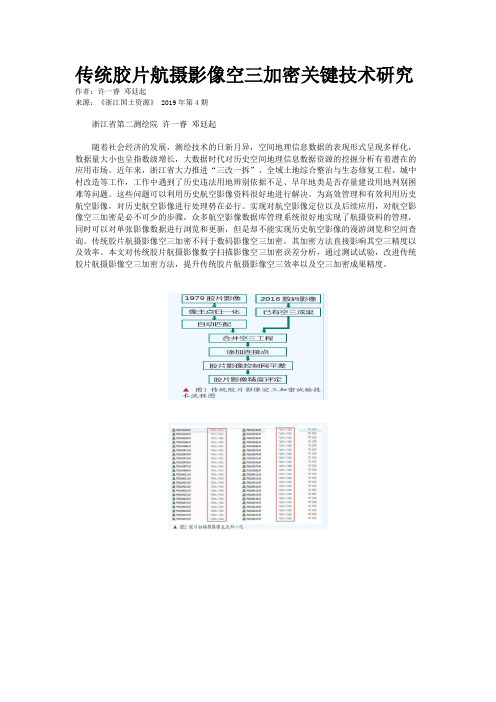
传统胶片航摄影像空三加密关键技术研究作者:许一睿邓廷起来源:《浙江国土资源》 2019年第4期浙江省第二测绘院许一睿邓廷起随着社会经济的发展,测绘技术的日新月异,空间地理信息数据的表现形式呈现多样化,数据量大小也呈指数级增长,大数据时代对历史空间地理信息数据资源的挖掘分析有着潜在的应用市场。
近年来,浙江省大力推进“三改一拆”、全域土地综合整治与生态修复工程、城中村改造等工作,工作中遇到了历史违法用地辨别依据不足、早年地类是否存量建设用地判别困难等问题。
这些问题可以利用历史航空影像资料很好地进行解决。
为高效管理和有效利用历史航空影像,对历史航空影像进行处理势在必行。
实现对航空影像定位以及后续应用,对航空影像空三加密是必不可少的步骤,众多航空影像数据库管理系统很好地实现了航摄资料的管理,同时可以对单张影像数据进行浏览和更新,但是却不能实现历史航空影像的漫游浏览和空间查询。
传统胶片航摄影像空三加密不同于数码影像空三加密,其加密方法直接影响其空三精度以及效率。
本文对传统胶片航摄影像数字扫描影像空三加密误差分析,通过测试试验,改进传统胶片航摄影像空三加密方法,提升传统胶片航摄影像空三效率以及空三加密成果精度。
一、传统胶片航摄影像空三加密误差分析传统胶片航摄影像,相对于数码航片会有一些新的误差源影响其空中三角测量精度,主要以下几个方面。
(一)内定向利用影像数字化器将胶片航片扫描转换成数字影像,其主要是将原来模拟方式的信息转换成为数字形式的信息。
但每张数字影像大小会不一致,所以首先通过内定向的方式将扫描影像的扫描坐标系转换到像平面坐标系,内定向误差是传统胶片航摄影像空中三角测量的主要误差。
(二)控制点获取困难传统胶片航摄影像空三加密成果精度较低,像控点成果较少且精度较低,特别对于空三成果缺失的上世纪七八十年代早期历史航片,与现今相隔年限较长,变化较大,若通过实地测量历史航片的像控点数据会相当困难且不太现实。
如何获取早期历史航片的像控点将是早期历史航片空三加密的关键。
空卫星遥感与航空摄影测量:三加密

二、空三加密流程及操作
建立的工程如下图所示
二、空三加密流程及操作
建立的工程如下图所示,此时需要设置扫描分辨率,选择根节 点上,在属性窗口中设置整体扫描分辨率,单位为mm
二、空三加密流程及操作
二、空三加密流程及操作 2.2、控制点文件编辑
控制点文件为外业采集,格式如下:
注意:次控 制点X、Y、 Z为数学坐 标系,注意 X与Y的顺序
二、空三加密流程及操作
3、自动转点
内定向结束后, DATMatrix 主菜单上选择操作-自动转点弹 出空三自动转点。EO信息如果没有高精度pos数据一般不建 议点上。转点完成后,如下图所示
二、空三加密流程及操作
4、交互编辑
刺入控制点后,进行平差解算,程序主菜单操作-PATB平 差,争议点窗口会显示争议点信息
二、空三加密流程及操作
二、空三加密流程及操作
平差收敛后,添加预测的控制点,选择编辑命令-刷 新预测控制点。从外围先刺入。 刺入所有控制点后再进行PATB平差,知道像方和物 方没有粗差点。
2、参数编辑
2.1、相机文件编辑
DATMatrix 主菜单上选择参数-相机文件,导入需 要加载的相机文件,点击确定即可(相机文件在相 机检校时会生成 )。导入完成后程序会自动执行内 定向,选择是执行自动内定向
二、空三加密流程及操作
2.2、控制点文件编辑
DATMatrix 主菜单上选择参数-控制点文件,弹出 控制点编辑对话框
二、空三加密流程及操作 5、导出为MapMatrix工程文件
平差满足定向精度后,需要输出空三成果,程序 主菜单导入/导出-导出为MapMatrix工程,选 择保存的路径和名称。
第六章-空三加密之欧阳法创编

第六章空三加密空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。
概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)。
本章以MapMatrix系统空三加密相关模块AATMatrix的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容。
作为补充和比较,又增加介绍了LPS空三的过程。
6.1 实习内容和要求本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatrix和LPS两个软件进行空三加密的流程。
6.2 AATMatrix空三加密6.2.1 原理和操作流程概述利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量。
区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础。
区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高。
成为空三的主流方法。
光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标。
AATMatrix单个测区工作流程图如图6-1所示:图6-1 AATMatrix空三加密流程图一.新建测区:1. 新建一个测区或打开一个已存在的测区二.测区参数设置:1. 测区参数设置,包括摄影比例尺,测区编号,以及相机类型等2.相机参数的导入,注意相机文件的路径3.影像的导入,设置航带数及添加影像并且对像素大小,相机参数,相机是否反转等进行设置4.控制点导入,注意PATB不支持带字母的控制点格式并且注意路径(或GPS/IMU参数的导人,注意线元素和角元素的顺序关系)三.操作步骤:5.内定向,包括手工和自动量测两种方式6.航带连接,通过相邻相邻航带间的航带连接点确定航带间的连接关系,为后期航带间转点提供初值(如果是GPS辅助空三,不需要做航带连接)7.自动提取,通过相对定向确定航带内相临影像之间相对位置关系,以及由公共连接点来确定相对定向模型。
摄影测量基础课程设计(空三加密)

摄影测量基础课程设计(空三加密实验)实习报告学院遥感信息工程学院班级学号姓名日期2011年12月24日1一、空三加密1.加密计划·13·12 ·14102·22 ·2421 23 8033401202·32 33 ·34 9033401 ·加密点像主点控制点2.利用WUCAPS解算1.构建自由网模型定向结果2.光束法平差结果像点观测值中误差:7.7微米 定向点残差检查点残差二、 内定向解算 1.内定向解算流程 计算公式:yb x b b y ya x a a x 210210++='++='其中x , y 表示扫描坐标,y x '',为像平面坐标。
根据最小二乘原理,利用8个方程求解出6个仿射变换系数:)()(1PL A PA A X T T -= 2. 内定向计算结果 像片编号:0319 仿射变换系数为:a0=-115.369111 a1=0.020991 a2=-0.000019 b0=-118.505165 b1=0.000019 b2=0.020988 逆仿射变换系数为:a0'=5501.359533 a1'=47.639959 a2'=0.043709 b0'=5641.301484 b1'=-0.042416 b2'=47.645139 像片编号:0320仿射变换系数为:a0=-115.702186 a1=0.020990 a2=-0.000020 b0=-118.488226 b1=0.000018 b2=0.020989 逆仿射变换系数为:a0'=5517.813035 a1'=47.642464 a2'=0.046214 b0'=5640.442233 b1'=-0.041386 b2'=47.643811 像片编号:0321仿射变换系数为:a0=-115.767989 a1=0.020990 a2=-0.000021 b0=-118.528094 b1=0.000020 b2=0.020988 逆仿射变换系数为:a0'=5520.953536 a1'=47.641138 a2'=0.047540 b0'=5642.348736 b1'=-0.044923 b2'=47.647349 像片编号:0332仿射变换系数为:a0=-118.255058 a1=0.020990 a2=-0.000023 b0=-118.243295 b1=0.000023 b2=0.020988 逆仿射变换系数为:a0'=5639.984539 a1'=47.641431 a2'=0.051964 b0'=5627.551484 b1'=-0.052148 b2'=47.645139 像片编号:0333仿射变换系数为:a0=-118.486044 a1=0.020991 a2=-0.000026 b0=-118.199845 b1=0.000024 b2=0.020989 逆仿射变换系数为:a0'=5651.578544 a1'=47.640252 a2'=0.058152 b0'=5624.910733 b1'=-0.055537 b2'=47.643811 像片编号:0334仿射变换系数为:a0=-117.707089 a1=0.020991 a2=-0.000023b0=-118.164145 b1=0.000022 b2=0.020989逆仿射变换系数为:a0'=5613.875040 a1'=47.640105 a2'=0.053289b0'=5624.051484 b1'=-0.049789 b2'=47.6448423. 采用解算的内定向参数进行光束法平差的结果像点观测值中误差:7.8 微米定向点残差检查点残差三、实习总结与体会本次实习主要学习了空三加密软件和Wucaps软件的基本操作,从摄影测量的基本理论出发,通过资料准备、同名像点量测、内定向、相对定向(和模型连接)、概率绝对定向(光束法区域网准备)、光束法区域网平差,完成空中加密的整个流程。
基于UCX数字航空影像的空三加密像控点布设方案探讨
基于UCX数字航空影像的空三加密像控点布设方案探讨郑颖;乔炜;沈莹;秦思娴;高雅冰【摘要】随着数字航空摄影技术的成熟,数字航空摄影测量被越来越多地应用于数字地形图测绘.现有的航空摄影作业规范对于外业像控点布设和内业空中三角测量均有明确的规定,但在保证精度的前提下,若用已有规范要求的作业方法进行处理,其外业像控点的布设工作量会非常大,工作效率也不高,其成本也高.本文利用2010年航飞的UCX数码航摄影像,将生产经验与理论相结合,寻找一种既能满足技术要求规定和生产技术规范,又能减少外业像控点布设工作量、缩短工作周期、降低成本的数字航空影像空三加密像控点布设方案.【期刊名称】《城市勘测》【年(卷),期】2016(000)002【总页数】5页(P79-83)【关键词】UCX数字航空影像;空中三角测量;空三加密;像控点布设方案【作者】郑颖;乔炜;沈莹;秦思娴;高雅冰【作者单位】武汉市测绘研究院,湖北武汉 430022;武汉市测绘研究院,湖北武汉430022;武汉市测绘研究院,湖北武汉 430022;武汉市测绘研究院,湖北武汉430022;武汉市测绘研究院,湖北武汉 430022【正文语种】中文【中图分类】P231如今数字航空摄影技术虽然没有传统光学航摄那样完善,数字航空摄影技术已经越来越多地被用于测绘生产单位,其后期影像处理的技术环节也在逐步走向成熟。
数字摄影测量完全替代传统的胶片摄影测量已成必然。
UCX超大幅面数字航摄像机是美国Microsoft公司继UCD之后推出的新一代数字航摄系统,是基于大面阵CCD设计和FMC电子像移补偿,具有大幅面、高航向重叠度(≥90%)、高分辨率(6.0 um)、集成POS技术等优势,在GIS、遥感和制图等领域都得到了广泛的应用。
与传统胶片影像(23 cm×23 cm)相比较,UCX影像仅仅只有9 cm×6 cm,如果对相同面积的区域航飞来进行覆盖,由于数字影像像幅比胶片影像小很多,其数量则会远大于胶片影像的数量。
无人机影像空三后处理流程
无人机影像空三后处理流程1、数据的准备A、原始影像以及曝光点数据无人机低空航摄采用的是普通数码相机,需要进行相机畸变纠正才能用于后期空三处理。
但是我们采用的是双拼相机,原始影像是分为前后相机,而且相片好是一一对应的,这个是必须注意的。
曝光点数据是指的每张相片曝光时的坐标数据,它也是与相片一一对应的。
B、像控点数据像控点数据包括像控点坐标和点之记以及像控点刺点图,点之记主要是记录像控点所在位置的信息,刺点图记录的是像控点在图像上的准确位置,方便空三加密是刺控制点。
2、数据预处理数据预处理与空三软件有关,也与相机有关。
普通相机的相片需进行畸变纠正,双拼相机的影像需进行前后相片的拼接,拼接过程已经进行了畸变纠正。
一般相片预处理时需将相片按照航带分开并按照飞行方向适当旋转(相邻航线的相片旋转角度相差180度),有的空三软件需将相片格式转换为tif格式才能做后期处理,在转格式和旋转相片时,为了保持相片信息不丢失,最好是PhotoShop软件来处理,为了提高效率,可以采用PS的批处理命令。
如果是用MAP-AT软件的话,相片可放在一个目录,格式也不需转换,直接用JPEG格式,但是仍需按照航带旋转相片,这是为了方便批处理建立空三的工程文件。
像控点数据按照编号和航带分好目录。
3、空三加密处理空三加密处理是航摄中最重要的步骤,也是最繁琐的步骤。
不同的软件空三步骤有些许不同,但是大同小异。
一般都是先做内定向,然后是相对定向,最后做绝对定向,绝对定向是需要控制点数据的。
所谓加密其实就是平差过程,为了提高加密精度一般在最后都会在绝对定向的基础上做一次在整体的光束法平差,光束法整体平差不引入中间步骤的参数,是以精度最高。
当然这只是理论上的流程,真正的处理过程比较繁琐也不是全按照流程,只要知道每一步流程的作业就行。
这里以MAP-AT软件为例讲解下空三流程:(略,可参考MAP-AT处理流程文档)4、生成DEM和DOM做完空三之后就可以生成DEM和DOM了,在相对定向之后可以将部分加密点假设为已知点,所以相对定向之后就可以做这一步了,如果只是需要没用坐标的正射影像的话,可以在相对定向之后做这一步。
INPHO软件自动空三加密标准流程
INPHO软件自动空三加密启动软件后建立一种新旳工程,点击菜单栏旳File,弹出窗口点击New File弹出对话窗口点击ok,浮现下面旳窗口。
根据有关旳设计文献,数据视状况开始相应旳操作1.建立相机文献双击1弹出下面旳对话窗口点击后弹出窗口填写相应旳相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机旳检校文献,把相应旳值填写到窗口中,由于影像经过畸变差改正所在像主点旳坐标值都给定零值,点击接着点击下图中旳到此相机文献就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import旳第一种选项,如下图点击按钮,选中选择影像寄存旳工程目录文献夹点击按钮影像导入,在“”处填写飞行区域旳地面平均高度值,点击按钮进行下一步点击按钮,浮现下图旳操作点击图中旳按钮,点击下图中旳按钮3.影像就导入工程完毕了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出旳XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#⋯⋯⋯⋯#如果是GPS辅助照相,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图旳窗口点击上图中红色框标处,浮现下图旳对话窗口点击上图中红色框标处,浮现下图旳对话窗口选择根据数据检查软件输出旳XYZ坐标建立旳GPS导航数据后,双击图中红色框标注旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口把影像序号、坐标相应好后点击上图中旳按钮浮现下图旳对话窗口勾选相相应旳选项后点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口根据设计规定填入限差值。
INPHO软件自动空三加密流程
INPHO软件自动空三加密启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File弹出对话窗口点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作1.建立相机文件双击1弹出下面的对话窗口点击后弹出窗口填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击接着点击下图中的到此相机文件就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图点击按钮,选中选择影像存放的工程目录文件夹点击按钮影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步点击按钮,出现下图的操作点击图中的按钮,点击下图中的按钮3.影像就导入工程完成了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#????#如果是GPS辅助摄影,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图的窗口点击上图中红色框标处,出现下图的对话窗口点击上图中红色框标处,出现下图的对话窗口选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口根据设计要求填入限差值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
进行航空影像生产首先要根据空三加密的要求,对原始 资料进行整理,主要包括原始影像、控制点文件、相机文 件和P0S文件,以便满足后续生产要求。 2.1影像数据
进行航空影像整理,是将航空影像数据整理到空三加密
要求的文件夹中,同时进行影像数据检查。 1) 查看影像是否存在补飞的情况,如果测区中有补飞
2
影像名 与影像数据整理文件夹中的影像名称一致
3
X(B)
东坐标,按实际情况填写
4
Y(L)
北坐标,按实际情况填写
5
Z(H)
高程,按实际情况填写
6
phi
按实际情况填写
7
cmega 按实际情况填写
8
kappa 按实际情况填写
2. 3. 1 control, txt文件格式(见图3)
//点名
kzd 1 2 0103 kzd 1 2 0111 kzd 1 2 0119 kzd 1 2 0127 kzd 1 2 0135 kzd 1 2 0143 kzd 1 2 0151 kzd 1 2 0159 kzd 1 2 0167 kzd 1 2 0175 kzd 1 2 0183 kzd 1 2 0191 kzd 1 4 0295 kzd 1 4 0303
作者简介:牛泽平(1974—),男,山西临县人,高级工程师,本科,毕业于式汉測绘科技大学,主要从 事地图编制、地理国情普查、地理国情监测和基础測绘数据更新等方面的工作。(邮箱)707645476@
o □ 92 豔幣ANG
表1 pos. txt文件参数项说明
列号 参数项
参数说明
1
航带号 按照飞机实际航带编号,同一航带标号一致即可
华北自然资源I论文
Huabei Natural Resources
nqi
u*
浅谈航空影像空三加密技术流程
牛泽平
(山西省地图院,山西 太原030002)
摘要:空三加密作为航空摄影测量技术的关键环节,其技术流程的符合性、完整性,决定着加密成果的
质量,影响着后续测绘成果(DEM、DOM. DLG)的生产。文章就航空影像空三加密技术流程进行浅析,明确 技术流程各环节的工作内容和数据要求,确保空三加密成果的质量。
204696.8905 219149.4929 4.061103693
205199.8892 218407.5210 3.278701502
Y(L) 19.9827065 19.9821739 19.9816475 19.981124 19.9805908 19.9800465 19.9795078 19.9789695 19.9784333 19.9779023 19.9773664 19.9768276 19.9762881 19.9757517 19.9751988
的条带,查找出补飞的条带,确认重叠区的影像,将重叠 区的影像根据实际情况去掉多余的影像。
2) 检查影像水域的大小,查看影像中水域所占的比 例,若水域面积较大,该影像可考虑剔除,不参与构网, 否则会影响构网的精度。
3) 检查影像与P0S数据里的影像名是否一致。 2. 2 POS资料
将P0S数据资料整理成空三加密要求的格式,以直接用 于空三加密的生产。
2. 2. 1整理pos. txt文件 根据POS数据资料,整理成空三加密生成所需要的txt格 式。pos. txt文件格式见图1。 pos. txt文件参数项说明见表1。
//StripID 妙像名 1 IMG 3 7 0397 1 IMG 3 7 0398 1 IMG 3 7 0399 1 IMG 3 7 0400 1 IMG 3 7 0401 1 IMG 3 0402 1 IMG 3 r 0403 1 IMG 3 7 0404 1 IMG 3 7 0405 1 IMG 3 r 0406 1 IMG 3 r 0407 1 IMG 3 7 0408 1 IMG 3 7 0409 1 IMG 3 r 0410 1 IMG 3 7 0411
Z(H)
phi
576.801 3 1
576.987 4 1
577.107 3 5
577.732 3 4
579.164 3
579.523 2 1
579.034 1 9
578.739 3 3
577.631 2 6
578.911 2 8
578.35 2 7
577.995 3 3
578.503 3 1
578.828 2 6
579.547 .1
图1 pos. txt文件格式
omega -3 -3 5 -3 5 -4 1 -3 5 -4 1 -2 2 -4 2 -3 2 -3 1 -3 5 -2 6 -3 6 -2 -2 .4
kappa 121 121 121 121.1 120.8 120.8 120.6 120.8 120.8 120.7 121 120.8 120.8 121 121
X (东)- Y (北)
Z
200983.9164 220569.7854 1.311572617
202150.7063 220178.8079 1.540598531
203072.7044 219584.6740 3.916668522
204017.2024 219231.2439 3.160075986
X(B) 110.4104874 110.4114211 110.412347 110.4132733 110.4142139 110.4151716 110.4161388 110.4170992 110.4180517 110.4189902 110.4199342 110.4208882 110.4218355 110.4227902 110.4237638
关键词:航空影像;空三加密;技术流程
中图分类号1672-7487 (2019) 03-91-4
1引言
为适应我国经济社会发展新常态和新需求,传统基础测 绘逐步转型发展为新型基础测绘,而测绘技术手段的不断 创新是推动传统基础测绘转型发展的主要力量,其中航空 摄影测量技术的发展应用,为基础地理信息数据快速更新 提供了有力的技术保障.空三加密作为航空摄影测量技术 的关键环节,其技术流程的符合性、完整性,决定着加密 成果的质量,影响着后续测绘成果的生产。空三加密主要 技术流程有原始资料整理、空三加密两部分。