空三加密inpho5.7操作流程
无人机航空影像空三加密流程
无人机航空影像数据处理流程中国测绘科学研究院北京东方道迩信息技术有限责任公司目录1、无人机航空影像数据处理流程 (3)2、无人机航空影像数据要求 (4)3、无人机航空影像数据空三加密流程 (5)3.1畸变差校正 (5)3.2建立测区工程 (7)3.3.1工程目录及相机检校文件设置 (8)3.3.2设置航空影像数据 (10)3.3.3设置控制点数据 (14)3.3空三加密 (15)3.4.1数据预处理 (16)3.4.2航带初始点提取 (19)3.4.3自动相对定向及修改 (21)3.4.4自由网平差 (31)3.4.5控制点提取及区域网平差 (35)4、DEM与DOM制作 (37)4.1 DEM匹配及编辑修改 (37)4.1.1工程及格式转换 (37)4.1.2核线影像生成及DEM匹配 (40)4.1.3 DEM编辑修改 (46)4.2 DOM纠正及分幅 (52)4.3.1 DOM纠正及拼接 (52)4.3.2 DOM分幅 (60)1、无人机航空影像数据处理流程高分辨率遥感影像一体化测图系统PixelGrid作为卫星影像数据处理的能力和效率在生产过程中已经得到了很好的验证,其数据适用范围之广、处理效率之高在国内都是其它同类软件无法比拟的。
无人机航空摄影是一种新型的航空影像数据获取方式,由于无人机种类不同以及所搭配的相机不同,其获取数据的质量也不相同,PixelGrid针对国内测绘部分中低空领域普及的无人机航空拍摄数据,提供了高效快速的处理。
其无人机航空影像作业流程图如下:图1-1 无人机航空影像处理流程2、无人机航空影像数据要求对于无人机数据的处理需求必要的一些文件。
其中包括原始影像数据、相机检校文件、控制资料、航线结合表(航线索引图,包括飞行信息)等。
原始数据格式可以为JPG、BMP、TIF等;相机检校文件包括:相机像主点坐标、相机焦距、像元大小、径向畸变差系数(K1、K2)、切向畸变差系数(P1、P2)、CCD非正方形比例系数α、CCD非正交性的畸变系数β、像方坐标系等(其单位为像素或毫米)。
INPHO软件进行带状测区数码影像的POS辅助空三加密方法探讨_杨希
测区立体模型计算及平差处理: 根据设置的平差 参数进行光束法区域网平差计算;
精度检查: 主要包括模型连接点质量检查和控制 点残差检查,经过调整处理满足精度要求后,导出平差 计算和精度统计报告。
INPHO 软件空三加密流程如图 1 所示。
3 结论
图 6 模型连接点强度示意
通过模型连接点的分布和强度检查后,会发现连 接点空洞,因此需要在连接点空洞处以立体量测的方 式手动增加连接点,补足空洞,以增强测区模型的稳定 性和系统性( 如图 7 所示) 。
2. 4 POS 数据的有效引入
在进行模型连接点的自动匹配和空三平差计算
以武汉至襄阳、十堰铁路带状测区多个测段的数 码影像为依托,在 POS 信息的辅助下,采用 INPHO 软 件进行空三加密处理。通过多个航带数据的处理操 作,探讨和总结出采用 INPHO 软件对带状测区数码影 像进行 POS 辅助空三加密的四点方法和技巧:
INPHO 是由德国测绘学家 Ackermann 教授创立 和研发的数字摄影测量系统,用于空三加密处理的模 块为 MATCH - AT,该模块采用光束法区域网平差模
收稿日期: 2015-01-08 作者简介: 杨 希( 1985—) ,女,2009 年毕业于西南交通大学摄影测量 与遥感专业,硕士,工程师,E-mail: tsygkyyx@ 163. com。
运营中的轨道线路、周围的建( 构) 筑物及基础设施因 受施工影响而产生变形,严重时可能会危及线路及其
度差异和变化量,适用于多点相对沉降测量,以其精度 高、效率高、全天候,自动化性能高等优势在城市轨道
附属结构安全,影响城市轨道交通的运营。在运营线 路附近施工时,加强运营线路道床及其附属结构的监 测,保证城市轨道交通的运营安全显得十分必要。静
inpho卫星三角测量操作教程

操作教程卫星影像三角测量1目录1.关于“卫星空三” (3)2.工程设置 (3)2.1工程准备 (3)2.1.1创建一个新的工程-basics (3)2.1.2影像定义 (4)2.1.3点 (6)2.1.4完成工程定义 (9)2.2影像和概览 (10)2.2.1转换JPEG2000影像并创建tiff格式影像的金字塔 (10)3.卫星影像空中三角测量 (12)3.1概述 (12)3.1.1界面概述 (12)3.1.2工作流程概述 (12)3.2导航 (13)3.2.1导航 (13)3.3点量测、连接点提取和调整 (14)3.3.1一般 (14)3.2.3处理步骤 (14)3.3.3编辑功能 (16)3.3.4调整策略和连接点提取 (17)3.3.5工作步骤 (17)3.3.6在已存在的连接点中增加影像量测值 (18)3.3.7新的连接点的量测 (19)3.3.8在立体中量测 (19)3.4控制点质量和分析 (21)3.4.1完成步骤 (21)3.5定向 (25)3.5.1精化rpc(可选) (25)3.5.2恢复rpc值 (25)3.6自由网结构和控制点分布 (25)3.6.1自由网结构 (25)3.6.2控制点分布 (26)21.关于“卫星空三”卫星空三在标准的applicationsmaster中为卫星影像的外方位提供了一套完整的工作流程。
这个模块包含工程定义、交互式的控制点测量、自动连接点提取和自动、鲁棒的区域调整。
软件限制:(1)提供rpc信息的传感器(2)在一个工程文件中,不能混合传感器。
比如,含有spot6的pleiades推荐:tiff格式的影像根据完整的卫星处理流程,模块MATCH-DSM、DTMaster、OV、OM都可以使用。
许可卫星空三模块需要一个标准的MATCH-AT许可。
它仅对完整版本有效,对MATCH-AT简化版本或者教育软件包是无效的。
2.工程设置后续影像给出带影像和控制点投影的区域结构。
INPHO软件进行带状测区数码影像的POS辅助空三加密方法探讨_杨希

收稿日期:2015-01-08作者简介:杨希(1985—),女,2009年毕业于西南交通大学摄影测量与遥感专业,硕士,工程师,E-mail :tsygkyyx@163.com 。
文章编号:1672-7479(2015)02-0005-03INPHO 软件进行带状测区数码影像的POS 辅助空三加密方法探讨杨希(中铁第四勘察设计院集团有限公司,湖北武汉430063)Discussion on the POS-Assisted Aerial Triangulation Methodof Digital Images in Banded Area Based INPHOYANG Xi摘要以含POS 信息的带状测区数码影像为数据源,对应用INPHO 软件进行空三加密的流程和方法进行探讨。
通过多测段数据的POS 辅助空三加密处理,从数码影像预处理、外控点量测顺序、加密点预量测、模型连接点精度检查及调整和POS 数据的有效引入等方面进行实验研究,总结出相应的处理流程和方法技巧,快速高效地完成空三加密处理,并有效保证空三加密的精度。
关键词空三加密POS 数据数码影像INPHO 软件中图分类号:P231.4;P228.4;P227.9文献标识码:A空三加密是摄影测量内业测图和数字产品生成的第一道工序,其核心内容是以相片上的像点坐标为依据,用摄影测量的方法解求测区中所有影像的外方位元素,并基于摄影过程的几何反转,重建可量测的几何立体模型,然后解求出地面点的空间坐标[1,2]。
POS机载定位定向系统是基于全球导航卫星定位系统GNSS 和惯性导航测量装置IMU 直接测定影像外方位元素的现代航空摄影导航系统[1],由GNSS 定位技术获取航摄仪的位置参数,由IMU 测定其姿态参数,通过差分技术联合平差解算后,获得摄影时各影像的外方位元素,实现无地面控制或仅有少量地面控制点的地面定位[4-8]。
当前的摄影测量系统已逐步实现全数字摄影测量的处理模式,即将POS 信息辅助到摄影测量处理中,利用模式识别技术和影像匹配等技术,辅以少量的人工交互控制,实现半自动/全自动的空三加密。
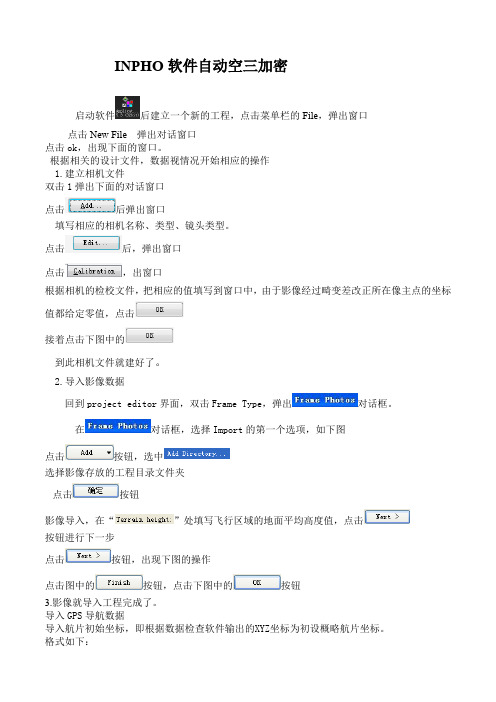
INPHO软件自动空三加密流程
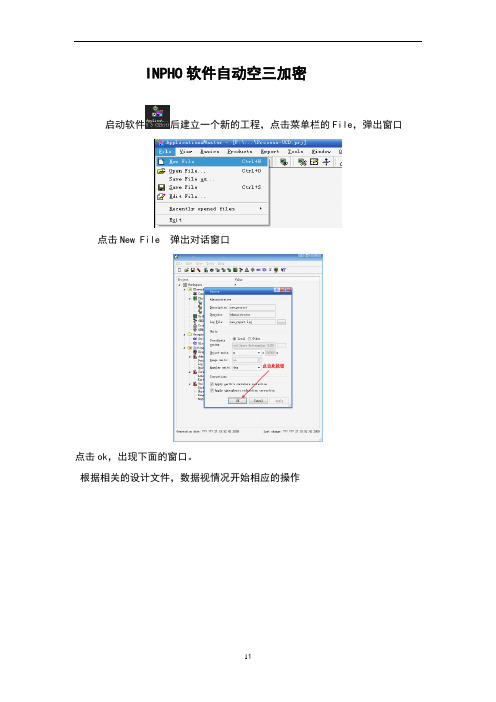
INPHO软件自动空三加密启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File 弹出对话窗口点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作1.建立相机文件双击1弹出下面的对话窗口点击后弹出窗口填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击接着点击下图中的到此相机文件就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图点击按钮,选中选择影像存放的工程目录文件夹点击按钮影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步点击按钮,出现下图的操作点击图中的按钮,点击下图中的按钮3.影像就导入工程完成了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#⋯⋯⋯⋯#如果是GPS辅助摄影,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图的窗口点击上图中红色框标处,出现下图的对话窗口点击上图中红色框标处,出现下图的对话窗口选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口根据设计要求填入限差值。
基于Inpho的空三加密及正射影像制作方法研究_胡海友
包括: 相机文件设置; 影像引入; GPS / IMU 数据引 入; 像控点引入; 设置航线; 单位设置等。
注意事项: ①相机参数严格按照相机检校报告填 写,尤其注意影像像素大小、相机焦距、主点偏移、及相 机畸变纠正参数的正确性。②引入 GPS / IMU 数据及 控制点数时注意 GPS 数据和 IMU 数据坐标系统要一 致,数据 ID 和影像 ID 一致,并设置标准差。
除使用软件整合工具之外,还可以使用 Radiometrix Editor 进行人工干预调节,以达到满意的效果。
编辑拼接线: 由于航片投影差问题,在房屋、道路 等地物处,使用自动拼接会产生如图地物接边问题,需 要在 Seam Editor 中修复( 见图 4) 。
桥梁处理: 由于 DEM( 见图 5) 没有采集桥梁,使 用该 DEM 生成的 DOM 会产生“拉花”和扭曲,解决方 案是采集特征线时采集桥梁轮廓,并整理桥梁处的等 高线,重新生成 DEM( 见图 6) 。将含有桥梁的单片重 新生成正射影像,并重新镶嵌。
( 3) 引入 GPS / IMU 数据时,注意 GPS 数据 ID 与 影像 ID 保持一致。
( 4) 可以手动生成航线,也可程序自动生成航线, 没有角元素数据可以使用程序自动计算的航偏角。
( 5) 可以将区域网划区块处理,通过小的区块可 方便检查航线设置及影像拼接是否正确。
( 6) 自动点生成过程中,使用 DTM 进行辅助,可 以提高效率和准确性。
HU Haiyou
摘 要 摄影测量工作站 Inpho 高精度、高效率、高度自动化的特点使其在 DOM 及 DEM 的生产制
作中的优势得以体现,内业作业效率和产品质量显著提高。以成贵线某隧道数字高程模型及正射影像
基于Inpho的空三加密及正射影像制作方法研究
2 I n p h o Ma t c h — a t 空三 加 密 技 术 流 程
Ma t c h - a t 是 专业 的空 三 加 密 软 件 , 自动 匹 配 有 效
正射 纠正 及 O r t h o V i s t a镶 嵌匀 色处 理 的技 术 流程 , 并 探讨 处理 过程 中遇 到 的问题及解 决方 案 。
连接 点 的功能强 大 , 在 沙漠 、 森林 等纹理 比较 弱 的区域
也 可 以很 好地进 行 匹配 , 可 减少人 工参 与度 , 提高 工作
2 . 2 自动 生 成航 线
可根 据实 际飞行 手 动设 置 航 线 , 也 可 使 用程 序 根 据G P S / I MU数据 自动计 算航 线 。
2 . 3 生成 金 字 塔 影 像
影像 必须 做金 字塔 影 像 处 理 , 以便 后 续 显 示及 连
基于I n p h o的空三加密及正射影像制作方法研究 : 胡海友
注意事项 : ①相机参数严格按 照相机检校报告填 写, 尤其注意影像像素大小 、 相机焦距 、 主点偏移 、 及相 机 畸变 纠正参 数 的正 确性 。② 引 入 G P S / I MU数 据 及 控制点数时注意 G P S 数据 和 I M U数据坐标系统要一 致, 数据 I D和影像 I D一致 , 并设置标准差。
高程模型( D E M) : 精度1 : 2 0 0 0 , 格网尺寸 2 m x 2 i n 。 地形 级别 : 本测 区航摄 资料 于 2 0 1 3年 6月 完成 航
空 摄影 , 使用 D MC航 测 彩 色数 码 片 , 共 1 8 2张 。航 摄
INPHO软件自动空三加密流程
INPHO软件自动空三加密启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File弹出对话窗口点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作1.建立相机文件双击1弹出下面的对话窗口点击后弹出窗口填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击接着点击下图中的到此相机文件就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图点击按钮,选中选择影像存放的工程目录文件夹点击按钮影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步点击按钮,出现下图的操作点击图中的按钮,点击下图中的按钮3.影像就导入工程完成了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#????#如果是GPS辅助摄影,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图的窗口点击上图中红色框标处,出现下图的对话窗口点击上图中红色框标处,出现下图的对话窗口选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口根据设计要求填入限差值。
INPHO软件自动空三加密流程样本

INPHO软件自动空三加密
启动软件后建立一个新的工程, 点击菜单栏的File, 弹出窗口
点击New File 弹出对话窗口
点击ok, 出现下面的窗口。
根据相关的设计文件, 数据视情况开始相应的操作
1.建立相机文件
双击1弹出下面的对话窗口
点击后弹出窗口
填写相应的相机名称、类型、镜头类型。
点击后, 弹出窗口
点击, 出窗口
根据相机的检校文件, 把相应的值填写到窗口中, 由于影像经过畸变差改正所在像主点的坐标值都给定零值, 点击
接着点击下图中的
到此相机文件就建好了。
2.导入影像数据
回到project editor界面, 双击Frame Type, 弹出对话框。
在对话框, 选择Import的第一个选项, 如下图。
第六章-空三加密-图文
第六章-空三加密-图文第六章空三加密空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。
空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。
这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。
概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)。
本章以MapMatri某系统空三加密相关模块AATMatri某的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容。
作为补充和比较,又增加介绍了LPS空三的过程。
6.1实习内容和要求本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatri某和LPS两个软件进行空三加密的流程。
6.2AATMatri某空三加密6.2.1原理和操作流程概述利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量。
区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础。
区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高。
成为空三的主流方法。
光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标。
AATMatri某单个测区工作流程图如图6-1所示:测区原始数据分析创建测区测区数据准备相机数据影像数据控制点数据POS/IMU数据相片航带分组创建影像列表自动内定向有无POS/IMU?有无量测航带间偏移人工干预连接点自动提取并建立测区自由网航带内连接点航带间连接点PATB自动选取标准点位连接点控制点量测连接点编辑PATB平差成果输出图6-1AATMatri某空三加密流程图一.新建测区:1.新建一个测区或打开一个已存在的测区二.测区参数设置:3.影像的导入,设置航带数及添加影像并且对像素大小,相机参数,相机是否反转等进行设置4.控制点导入,注意PATB不支持带字母的控制点格式并且注意路径(或GPS/IMU参数的导人,注意线元素和角元素的顺序关系)三.操作步骤:5.内定向,包括手工和自动量测两种方式6.航带连接,通过相邻相邻航带间的航带连接点确定航带间的连接关系,为后期航带间转点提供初值(如果是GPS辅助空三,不需要做航带连接)7.自动提取,通过相对定向确定航带内相临影像之间相对位置关系,以及由公共连接点来确定相对定向模型。
无人机影像空三后处理流程
无人机影像空三后处理流程1、数据的准备A、原始影像以及曝光点数据无人机低空航摄采用的是普通数码相机,需要进行相机畸变纠正才能用于后期空三处理。
但是我们采用的是双拼相机,原始影像是分为前后相机,而且相片好是一一对应的,这个是必须注意的。
曝光点数据是指的每张相片曝光时的坐标数据,它也是与相片一一对应的。
B、像控点数据像控点数据包括像控点坐标和点之记以及像控点刺点图,点之记主要是记录像控点所在位置的信息,刺点图记录的是像控点在图像上的准确位置,方便空三加密是刺控制点。
2、数据预处理数据预处理与空三软件有关,也与相机有关。
普通相机的相片需进行畸变纠正,双拼相机的影像需进行前后相片的拼接,拼接过程已经进行了畸变纠正。
一般相片预处理时需将相片按照航带分开并按照飞行方向适当旋转(相邻航线的相片旋转角度相差180度),有的空三软件需将相片格式转换为tif格式才能做后期处理,在转格式和旋转相片时,为了保持相片信息不丢失,最好是PhotoShop软件来处理,为了提高效率,可以采用PS的批处理命令。
如果是用MAP-AT软件的话,相片可放在一个目录,格式也不需转换,直接用JPEG格式,但是仍需按照航带旋转相片,这是为了方便批处理建立空三的工程文件。
像控点数据按照编号和航带分好目录。
3、空三加密处理空三加密处理是航摄中最重要的步骤,也是最繁琐的步骤。
不同的软件空三步骤有些许不同,但是大同小异。
一般都是先做内定向,然后是相对定向,最后做绝对定向,绝对定向是需要控制点数据的。
所谓加密其实就是平差过程,为了提高加密精度一般在最后都会在绝对定向的基础上做一次在整体的光束法平差,光束法整体平差不引入中间步骤的参数,是以精度最高。
当然这只是理论上的流程,真正的处理过程比较繁琐也不是全按照流程,只要知道每一步流程的作业就行。
这里以MAP-AT软件为例讲解下空三流程:(略,可参考MAP-AT处理流程文档)4、生成DEM和DOM做完空三之后就可以生成DEM和DOM了,在相对定向之后可以将部分加密点假设为已知点,所以相对定向之后就可以做这一步了,如果只是需要没用坐标的正射影像的话,可以在相对定向之后做这一步。
剖析空三的意义及航天远景空三加密流程
剖析空三的意义及航天远景空三加密流程
空中三⾓测量,⼜称“空三”,是学习摄影测量不得不谈论的重头戏。
摄影测量的任务就是在尽可能的减少外业⼯作的前提下,通过解析相⽚,获取测区的地理信息。
但是,摄影测量作业中,也需要⼀定数量的地⾯控制点。
例如:
(1)⼀张相⽚,需要四个地⾯控制点进⾏空间后⽅交会,解求相⽚的外⽅位元素;
(2)⼀个⽴体像对模型的绝对定向,需要四个地⾯控制点,求解7个绝对定向元素,才能将经相对定向建⽴的任意模型纳⼊到地⾯摄影测量坐标系中;
(所涉及概念可参考:航摄像⽚的内、外⽅位元素)
(3)相⽚的纠正,也需要地⾯控制点。
若测区所需的⼤量控制点全部由外业确定,那与摄影测量的初衷是相悖的,所以才有了“由外业实测少量的控制点,然后按照⼀定的数学模型,平差解算出摄影测量作业过程中所需的全部控制点及每张相⽚的外⽅位元素”的思想,这⼀思想被称为“解析空中三⾓测量”或“解析空中三⾓测量加密”,经过平差计算的控制点也成为“加密点”。
“空三”采⽤的平差模型有三种:
(1)航带法
(2)独⽴模型法
(3)光束法
这部分内容⽐较深奥,待笔者琢磨清楚在写出来。
航天远景是国内⽬前⽐较流⾏的空三加密软件,现将其流程贴出来:
另还有inpho 、pix4d、smart3D等软件,多⼤同⼩异,后续补图。
Inpho软件在风电工程无人机影像空三加密中的应用
Inpho软件在风电工程无人机影像空三加密中的应用作者:杨林波谢飞吴杰来源:《中国科技博览》2014年第34期[摘要]摄影测量工作站Inpho高精度、高效率、高度自动化的特点使其在DLG、DOM及DEM生产制作中的优势得以体现,内业作业效率和产品质量显著提高。
无人机航空摄影测量技术具有的高机动性、高分辨率、高度集成和低成本等特点,已经成熟应用于风能开发勘测上。
本文以西南地区某一风电工程生产数字线画图为例,对Inpho软件空三加密的流程进行介绍,并对平差后的精度进行了分析,最后本次应用做了总结。
[关键词]Inpho;空三加密;风电场;无人机影像中图分类号:V279+.2 文献标识码:A 文章编号:1009-914X(2014)34-0235-021 概况近年来,随着航测数据获取新技术的不断发展,尤其是带有POS系统的高分辨率、高精度数字航摄系统的不断成熟,以及无人机技术的快速发展,可为航测内业数字产品生产提供高精度的POS数据及高质量的影像数据等基础数据。
为提高电力勘测设计质量、加快勘测设计进度,航空摄影测量技术作为一种勘测手段发挥了重要作用,目前已被广泛应用于电力行业勘测设计中。
近年来,随着无人机航空摄影测量技术(以下简称无人机航测技术)的迅速发展,相对于常规摄影测量手段,无人机航测由于具有作业简便、高机动性及低成本等优势,正越来越多地应用于风电场的勘测设计工作中,尤其在西南地区,山地多、作业环境恶劣、风电场测区面积较小的特点,使用无人机航测技术获取区影像,更能凸显其特点。
2 Inpho空三加密流程Inpho是欧洲著名的航空摄影测量与遥感处理软件,由斯图加特大学阿克曼教授创建于德国,1980~1990年提供空三和地形建模产品,1990~2000年成为数字摄影测量的组件供应商,提供地形自动化提取和自动化三角测量的产品。
MATCH–AT作为Inpho软件的空三加密模块,其连接点匹配算法是基于特征级和最小二乘匹配相结合的多级影像金字塔匹配算法,其高精度、高效率的匹配特征能够保证每张像片超过100个匹配的连接点,自动匹配有效连接点的功能强大,即使在沙漠森林等纹理比较弱的区域也可以很好地进行匹配,大大减少了人工参与度,提高工作效率。
Inpho空三加密流程
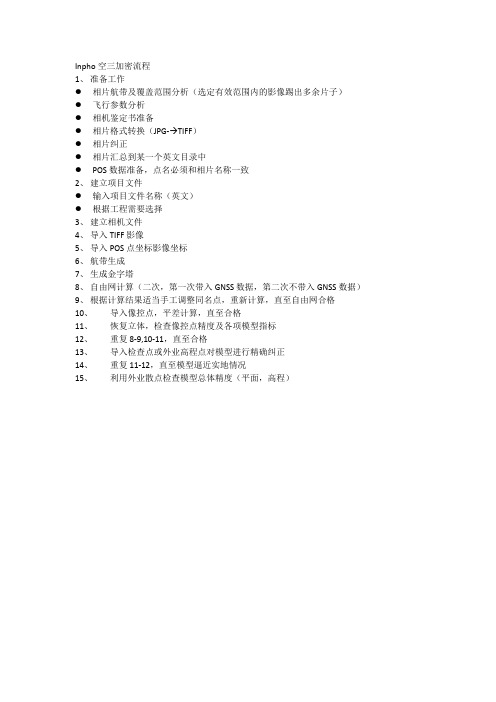
Inpho空三加密流程
1、准备工作
●相片航带及覆盖范围分析(选定有效范围内的影像踢出多余片子)
●飞行参数分析
●相机鉴定书准备
●相片格式转换(JPG-→TIFF)
●相片纠正
●相片汇总到某一个英文目录中
●POS数据准备,点名必须和相片名称一致
2、建立项目文件
●输入项目文件名称(英文)
●根据工程需要选择
3、建立相机文件
4、导入TIFF影像
5、导入POS点坐标影像坐标
6、航带生成
7、生成金字塔
8、自由网计算(二次,第一次带入GNSS数据,第二次不带入GNSS数据)
9、根据计算结果适当手工调整同名点,重新计算,直至自由网合格
10、导入像控点,平差计算,直至合格
11、恢复立体,检查像控点精度及各项模型指标
12、重复8-9,10-11,直至合格
13、导入检查点或外业高程点对模型进行精确纠正
14、重复11-12,直至模型逼近实地情况
15、利用外业散点检查模型总体精度(平面,高程)。
空三加密作业过程指导
空三加密作业过程指导-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII空三加密作业过程指导一、资料分析1、弄清航片所构成加密区域的情况:航线数量,每条航线的航片数量,航线旁向航向的重叠度,航线跳接等情况。
2、航片的内容:观察每张航片是否有阴影,云层。
纹理的复杂单调与否。
如有云层,要查明是否有补飞的航片。
如阴影太大,纹理单调,空三量测要考虑手工加点。
3、检查控制点的分布情况,要覆盖整个加密测区,在拟定好的区域内是否满足立体观测的要求。
二、数据准备1、航片的数据转换:旋转颠倒的航片成正向,检查四角框标的可量测性与否,航片数据格式转换,排列航片构成作业区域。
2、制作相机文件。
3、制作控制点文件。
4、建立测区,按加密软件的要求输入信息,将上面准备的数据组织成工作目录。
三、空三量测1、内定向。
2、手工选择航线偏移点。
3、动相对定向,自动模型连接,自动航线连接,自动选择加密点。
4、手工干预。
在上面的自动过程中如有失败的要进行手工操作。
检查自动选择的加密点是否均匀覆盖测区,在缺点或点稀少的标准点位上量测一些点。
5、控制点及检查点量测。
6、接边点的量测。
四、空三平差利用空三平差程序对上一步骤的数据进行计算,依据相应规范的限差迭代修改下列三项超限的点,直至满足要求。
1、点的观测精度,主要修改点的上下视差。
2、控制精度,修正控制点的误差。
3、接边精度,修正接边点的误差。
以上过程需反复趋近。
五、成果整理1、完整性。
2、易读性。
【航测 测绘师 无人机】超图INPHO MATCH-AT空三加密软件操作手册
INPHO MATCH-AT空三加密模块操作手册北京超图软件股份有限公司2012年2月目录1.1.启动“ApplicationsMaster” (2)1.2.打开项目 (2)1.3.新建项目/项目生成器 (2)1.4.影像金字塔 (13)1.5.控制点量测 (14)1.6.空中三角测量 (20)1.7. photo measure tool中查看空三结果 (32)1.8.后处理(最终空中三角测量) (36)1.9.抽稀点 (36)1.1.启动“ApplicationsMaster”在安装目录下点击生成的图标来启动“ApplicationsMaster”。
更多详细解释请看参考手册。
1.2.打开项目如果一个项目文件已经存在,点击打开按钮来加载已存在项目。
更多详细解释请看考参考手册。
如果这个项目是新创建,会自动加载。
如果你不想生成自己的项目,你可以通过选择项目菜单的打开按钮应用project_prepared.prj这个项目。
1.3.新建项目/项目生成器当点击新建按钮时,项目编辑器会自动的启动基本对话框。
从上往下逐个打开对话框,输入项目所需数据。
在视图列表双击任意的图标都会弹出编辑对话框或者从编辑菜单选择进行编辑。
最后,以任意名称保存项目,例如,<project_prepared.prj>。
1.3.1.基本对话框输入log文件的名称:分别确认像物方坐标m,图像坐标mm,角度grad等单位。
激活校正地球曲率、折射复选框。
在描述文本域输入一串字符。
操作者文本框默认为计算机名。
坐标系统不是必须定义的选项,因为这只是个小项目,所以选择local点击OK确认。
1.3.2.相机编辑器双击相机图标启动“相机编辑器”,这里可以新建相机或者导入一个从其他项目建好的已存在相机或者从老的inpho相机文件。
这里推荐保存所有的相机参数为一个通用的inpho项目文件,这个文件可以像数据库一样在Inpho软件提供服务。
空三加密流程

现阶段生成DOM的方式有多种,单片微分纠,全数字摄影测量系统。
但他们的工作原理都基本上是一样的。
都是通过DEM和原始扫描影像来生成正射影像的。
而今我们主要用到的是全数字摄影测量系统生成DOM。
利用全数字摄影测量系统生成DOM它的基本作业流程如下:1原始航片的扫描。
2外业控制测量。
3解析空三加密解算。
4全数字摄影测量的“三定向”。
(1)内定向:利用框标检校坐标与定位坐标,得到扫描坐标系与像片坐标系间的变换关系。
(2)相对定向:恢复构成立体像对的两张像片的相对方位,建立被摄物体的立体模型。
(3)绝对定向:由人工立体观测在左右影像上定位控制点,建立起像平面坐标系和大地坐标系的对应关系。
5按核线方向排列生成核线影像。
同名像点必然位于同名核线上,经过核线排列生成的核线影像,在立体观测时必然没有上下视差。
基于正射影像的制作我们一般生成水平的核线,以保证DOM的质量。
6影像匹配。
一般全数字摄影测量系统均采用“金字塔”式的多级匹配。
7,通过影像匹配结果,手工绘制一些特征点线导入匹配立体编辑。
进一步编辑DEM。
8读入初值点、特征点线、结合立体交互的编辑结果,自动生成准确的单独的相邻的左右核线影像数字高程模型DEM。
9利用单独的相邻的左右核线影像数字高程模型DEM,生成单像对的数字正射影像(DOM)。
正射影像的成果质量到现在只受上面的三个方面影响。
首先选用左右核线影像得到的DOM是有差别的;其次是连续像对的绝对定向不一致时,DOM的接边必然出现系统误差,如错位或重影等。
立体交互编辑左右像对DEM的接边误差也会影响到DOM;有什么样的DEM模型必然生成什么样的DOM,在生产DOM时的DEM不一定是正确的。
正确的DEM 并不一定能生成正确的DOM。
最简单的例子就是山谷或河流上的高架路,正确的DEM生成的DOM必然是V型的道路,原因就是数学模型是V型山谷。
10DOM的镶嵌精度检查。
这个过程主要通过PS技术来检测。
空中三角测量是立体摄影测量中,根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法。
基于INPHO软件的快速空三加密方法
基于INPHO软件的快速空三加密方法张小朋;余娜【摘要】对INPHO软件的空三加密流程和方法进行了探讨,从控制点量测、测区分区匹配、空三精度检查等方面进行空三加密实验,总结了快速高效完成空三加密工作的方法。
【期刊名称】《地理空间信息》【年(卷),期】2016(014)010【总页数】3页(P75-77)【关键词】数码影像;INPHO软件;空三加密;方法技巧【作者】张小朋;余娜【作者单位】武汉中测晟图遥感技术有限公司,湖北武汉430223;湖北省地图院,湖北武汉 430071【正文语种】中文【中图分类】P231空三加密是数字摄影测量产品生产的关键工序,影响着航测产品的生产效率与质量[1,2]。
其核心内容是依据相片上的像点坐标,用摄影测量的方法解求测区中所有影像的外方位元素,并基于摄影过程的几何反转,重建可量测的几何立体模型,然后解求出地面点的空间坐标[3]。
传统的空三加密,对控制点的数量和分布要求严格,需要大量的人工操作,生产效率低[4]。
随着GPS技术的发展,利用GPS/IMU辅助空三加密能在满足加密精度要求的基础上,最大程度地减少或不使用地面控制点,大大提高了空三加密效率[5]。
目前,国内学者对不同软件采用GPS/IMU辅助空三加密进行了实验,实验结果表明,在数据预处理、空三匹配、人工干涉消除点位相关粗差以及精度检查等生产环节上仍需较长时间[6,7]。
INPHO是欧洲著名的数字摄影测量系统,由德国Ackermann教授研发,用于空三加密处理的模块为MATCH-AT[8,9],具有较强的自动点匹配能力和高精度的点位预测能力[10]。
本文以我国南方某县为研究区域,探讨和研究了应用INPHO软件进行空三加密时提高效率的方法和技巧。
1.1 数据准备需要准备的数据包括多光谱数码影像、相机文件、POS数据(X、Y、Z、Omega、Phi、Kappa等影像初始外方位元素,坐标通过坐标转换和高程拟合后转为2000国家大地坐标系)、外控成果(包括电子档和纸质版的点之记、控制点点号与坐标对照表)。
基于inpho的空三加密方法
第36卷第1期2020年3月测绘标准化Sondardization of Serveying and MappingVci.36No1Myr.2020基于Iipho的空三加密方法王伟丽(自然资源部第一航测遥感院陕西西安74054)On Aeriai Trianrulation with InphoWANG WPin摘要:针对在A p P c软件下,大中比例尺地形图测图空三加密的模型定向残差问题,探讨借助Apho和软件的优势,有效结合软件进行质量控制,快速完成空三加密的方法。
这种方法不仅能弥补资源不足,还能提高空三加密工作的效率。
关键词:空三加密;单模型绝对定向;A p C j;MapMatOo;:Aeeat Tnangulation;Singte Monet ACsolutOy Oneetation;A p C c;MapMatOo中图法分类号:P231A p C j的空三功能模块MATCH-AT是高端航测软件中的经典°A p C j是基于特征和最小二乘法组合来完成连接点的匹配,通过交叉的多重连接点的连接以及像片间的条带间的连接,使连接点匹配达到了0.1个像元的精度,具有较强的连接点匹配能力和高精度的点位预测能力。
A p P c在空三加密方面虽然自动化程度高,但其立体测图功能在国内众多软件中不占优势,需要使用空三数据在测图软件中建立立体模型。
航天远景的MapMatOo能快速恢复立体模型,计算模型连接点和控制点的单模型绝对定向残差,再根据绝对定向残差结果在A p P c软件中调整模型连接点和控制点,从而保证空三加密的精度,为后续工序的数据采集工作提供可靠性。
本文探讨了在A p P c软件下,针对大中比例尺地形图测图空三加密中单模型定向的残差问题,借助MapMatOo软件进行单模型绝对定向的质量控,完成空加密的方°1I+pho空三加密技术流程1-1数据准备需要准备的数据有数码影像、像机文件、POS数据和像控点成°1.2影像预处理在ApplicotionMaster主界面的主菜单Basics下选择Image Commander,添加影像,生成影像金字塔°1.3建立工程打开ApplicationMaster主界面,创建工程。
航片空三流程

高程, 然后单击 (或踏下左脚踏开关) 确定该点的点位, 依次采集完该地物轮廓上的节点后, 单击(或踏下右脚踏开关)确认,即记录了该地物,同时,矢量窗口中会显示该地物的矢量 化符号。
第五步,编辑地物 激活立体模型或正射影像窗口,点击 ,激活编辑工具栏,移动测标至需要编辑的矢
量地物处,单击(或踏下左脚踏开关)选中该地物,然后再次单击(或踏下左脚踏开关)选 择该地物轮廓上的某点,即可对该点进行编辑。 第六步,导出矢量文件。 当地物采集完成后, 我们需要导出所采集的矢量文件, VirtuoZo 系统默认的矢量格式为.xyz, 也可以导出其他的格式,比如 AutoCAD 支持的 dxf 格式、ASCII 码纯文本形式等等。具体 操作是点击文件导出,然后选择需要的文件格式,设置相应的一些属性,指定一个路径即 可。
图 16 相对定向界面 进行自动相对定向 如上图所示, 在相对定向界面点鼠标右键, 选择自动相对定向, 程序将自动寻找同名点, 进行相对定向。完成后,影像上显示相对定向点(红十字丝) 。
3.绝对定向作业流程
绝对定向界面如图 17 所示:
图 17 绝对定向
第四步---同名核线影像的采集与匹配 非水平核线: 非水平核重采样是基于模型相对定向结果, 遵循核线原理对左右原始影像 沿核线方向保持 X 不变,在 Y 方向进行核线重采样。 水平核线:水平核重采样使用了绝对定向结果,将核线置平。 生成核线影像: 完成了模型的相对定向后就可生成非水平核线影像, 但是要生成水平核 线影像必须先完成模型的绝对定向。 核线影像的范围可由人工确定, 也可由系统自动生成最 大作业区。影像按同名核线影像进行重新排列,形成按核线方向排列的核线影像。以后的处 理,如影像匹配、等高线编辑等,都将在核线影像上进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空三加密技术总结
一、概述
空中三角测量,即解析空中三角测量,是指通过航测内业方法(包括内定向、相对定向、公共连接点的转刺)网构建空中三角网并按严密的数学模型进行区域整体平差,解求出全区所有加密点的地面坐标及像片方位元素。
目前Inpho是主流的航空摄影测量软件,支持对大飞机数据的空三加密,同时有专门的无人机模块对无人机数据进行空三加密,对飞行姿态不稳定的无人机数据具有明显优势。
二、数据准备
在实际工作中需要以下数据:
1、相机检校是航测处理中必不可少的。
一般航测后处理中需要相机检校后的焦距(mm)、像元大小(um)、主点偏移(PPA或 PPS)等;
2、航片数据。
影像一般以 Tif或 Tif jepg 格式保存、处理。
Jpg 格式在压缩过程中信息损失很大,自动空三加密时无法匹配出有效的连接点;
3、粗略的外方位数据。
航片的粗略外方位元素,大地平面坐标系统,定位精度在10-20米以内(俯仰角和偏转角尽量控制在20度以下);
4、地面控制点数据。
三、硬件配置情况
联想台式机,四核3.20GHz,4GB 内存。
四、技术路线
五、Inpho应用实例过程
1、数据预处理
(1)原始航片
数据检查,包括航片框幅、分辨率与相机报告中内容的检查。
航片名称与pos中的id号一一对应。
(2)pos数据整理
坐标为CGCS2000高斯克吕格投影坐标。
具体包括:id航片号、x坐标、y坐标、h高程、翻滚角、俯仰角、航飞角;以txt文件格式保存;航带间用#间隔。
(3)原始航片畸变处理,利用相机文件中的畸变参数应用Matrax软件。
像主点偏移x0、y0对应Matrax中的x0、y0,径向畸变系数为k1、k2对应Matrax中的k3、k5,像元大小,偏心畸变系数p1、p2对应Matrax中的p1、p2。
(4)控制点数据整理
控制点数据位txt格式,坐标为高斯2000投影坐标,高程为85高。
2、空三过程(1)工程建立
①相机编辑
将相机文件中的焦距、框幅、分辨率信息输入,如果使用做过畸变的航片,则像主点偏移填0,否则填写相机文件中的信息。
②添加航片
其中地形高度为地面的平均海拔,去掉“用现有GNSS方位进行初始化”的勾选。
③添加pos
Pos为txt格式,
对pos中各指标数据选取对应的类别。
对pos的标准差统一设为默认值。
④添加控制点文件
步骤与pos添加相同。
选择工程保存路径。
⑤调整航片旋转
进入多相片测量窗口,
根据所显示的航片,调整航片的旋转,使得整个测区的航片排列正确。
最后保存工程。
(2)生成航片金字塔
进入影像命令器窗口,
首先,选择RGB通道为真彩色。
然后,选择“处理影像概览”,颜色深度为8位,点击开始。
(3)航空摄影测量
①生成连接点
点击运行,开始生成连接点。
②控制点添加
进入多相片测量窗口,
在点列表双击控制点,生成控制点的预测位置,然后点击测量开始刺控制点。
保存刺点结果。
③平差运算
生成平差报告,
检查其中控制点的x,y误差,对其中误差较大的控制点重新刺点进行调整。
然后重新平差,直至平差结果符合要求。
3、DTM提取
其中网格最小尺寸为DTM的分辨率,分别设置网格和点云的输出路径。
最后点击运行。
4、生成正射影像
导入DTM数据,
点击“开始生成正射影像”设置正射影像参数,
设置正射影像输出路径。
点击运行,开始生成正射影像。