基于改进遗传算法的路径规划MATLAB实现【精品毕业设计】(完整版)
遗传算法详解(含MATLAB代码)
遗传算法详解(含MATLAB代码)Python遗传算法框架使用实例(一)使用Geatpy实现句子匹配在前面几篇文章中,我们已经介绍了高性能Python遗传和进化算法框架——Geatpy的使用。
本篇就一个案例进行展开讲述:pip install geatpy更新至Geatpy2的方法:pip install --upgrade --user geatpy查看版本号,在Python中执行:import geatpyprint(geatpy.__version__)我们都听过“无限猴子定理”,说的是有无限只猴子用无限的时间会产生特定的文章。
在无限猴子定理中,我们“假定”猴子们是没有像人类那样“智能”的,而且“假定”猴子不会自我学习。
因此,这些猴子需要“无限的时间"。
而在遗传算法中,由于采用的是启发式的进化搜索,因此不需要”无限的时间“就可以完成类似的工作。
当然,需要产生的文章篇幅越长,那么就需要越久的时间才能完成。
下面以产生"T om is a little boy, isn't he? Yes he is, he is a good and smart child and he is always ready to help others, all in all we all like him very much."的句子为例,讲述如何利用Geatpy实现句子的搜索。
之前的文章中我们已经讲述过如何使用Geatpy的进化算法框架实现遗传算法编程。
这里就直接用框架。
把自定义问题类和执行脚本编写在下面的"main.py”文件中:# -*- coding: utf-8 -*-import numpy as npimport geatpy as eaclass MyProblem(ea.Problem): # 继承Problem父类def __init__(self):name = 'MyProblem' # 初始化name(函数名称,可以随意设置) # 定义需要匹配的句子strs = 'Tom is a little boy, isn't he? Yes he is, he is a good and smart child and he is always ready to help others, all in all we all like him very much.'self.words = []for c in strs:self.words.append(ord(c)) # 把字符串转成ASCII码M = 1 # 初始化M(目标维数)maxormins = [1] # 初始化maxormins(目标最小最大化标记列表,1:最小化该目标;-1:最大化该目标)Dim = len(self.words) # 初始化Dim(决策变量维数)varTypes = [1] * Dim # 初始化varTypes(决策变量的类型,元素为0表示对应的变量是连续的;1表示是离散的)lb = [32] * Dim # 决策变量下界ub = [122] * Dim # 决策变量上界lbin = [1] * Dim # 决策变量下边界ubin = [1] * Dim # 决策变量上边界# 调用父类构造方法完成实例化ea.Problem.__init__(self, name, M, maxormins, Dim, varTypes, lb, ub, lbin, ubin)def aimFunc(self, pop): # 目标函数Vars = pop.Phen # 得到决策变量矩阵diff = np.sum((Vars - self.words)**2, 1)pop.ObjV = np.array([diff]).T # 把求得的目标函数值赋值给种群pop的ObjV执行脚本if __name__ == "__main__":"""================================实例化问题对象============================="""problem = MyProblem() # 生成问题对象"""==================================种群设置================================"""Encoding = 'RI' # 编码方式NIND = 50 # 种群规模Field = ea.crtfld(Encoding, problem.varTypes, problem.ranges,problem.borders) # 创建区域描述器population = ea.Population(Encoding, Field, NIND) # 实例化种群对象(此时种群还没被初始化,仅仅是完成种群对象的实例化)"""================================算法参数设置=============================="""myAlgorithm = ea.soea_DE_rand_1_L_templet(problem, population) # 实例化一个算法模板对象myAlgorithm.MAXGEN = 2000 # 最大进化代数"""===========================调用算法模板进行种群进化========================="""[population, obj_trace, var_trace] = myAlgorithm.run() # 执行算法模板population.save() # 把最后一代种群的信息保存到文件中# 输出结果best_gen = np.argmin(obj_trace[:, 1]) # 记录最优种群是在哪一代best_ObjV = obj_trace[best_gen, 1]print('最优的目标函数值为:%s'%(best_ObjV))print('有效进化代数:%s'%(obj_trace.shape[0]))print('最优的一代是第 %s 代'%(best_gen + 1))print('评价次数:%s'%(myAlgorithm.evalsNum))print('时间已过 %s 秒'%(myAlgorithm.passTime))for num in var_trace[best_gen, :]:print(chr(int(num)), end = '')上述代码中首先定义了一个问题类MyProblem,然后调用Geatpy内置的soea_DE_rand_1_L_templet算法模板,它实现的是差分进化算法DE-rand-1-L,详见源码:运行结果如下:种群信息导出完毕。
MATLAB实验遗传算法与优化设计(可编辑)
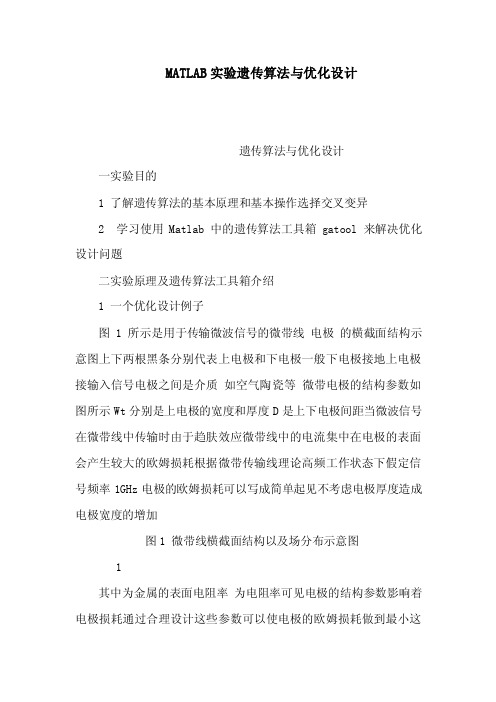
MATLAB实验遗传算法与优化设计遗传算法与优化设计一实验目的1 了解遗传算法的基本原理和基本操作选择交叉变异2 学习使用Matlab中的遗传算法工具箱 gatool 来解决优化设计问题二实验原理及遗传算法工具箱介绍1 一个优化设计例子图1所示是用于传输微波信号的微带线电极的横截面结构示意图上下两根黑条分别代表上电极和下电极一般下电极接地上电极接输入信号电极之间是介质如空气陶瓷等微带电极的结构参数如图所示Wt分别是上电极的宽度和厚度D是上下电极间距当微波信号在微带线中传输时由于趋肤效应微带线中的电流集中在电极的表面会产生较大的欧姆损耗根据微带传输线理论高频工作状态下假定信号频率1GHz电极的欧姆损耗可以写成简单起见不考虑电极厚度造成电极宽度的增加图1 微带线横截面结构以及场分布示意图1其中为金属的表面电阻率为电阻率可见电极的结构参数影响着电极损耗通过合理设计这些参数可以使电极的欧姆损耗做到最小这就是所谓的最优化问题或者称为规划设计问题此处设计变量有3个WDt它们组成决策向量[W D t] T待优化函数称为目标函数上述优化设计问题可以抽象为数学描述2其中是决策向量x1xn为n个设计变量这是一个单目标的数学规划问题在一组针对决策变量的约束条件下使目标函数最小化有时也可能是最大化此时在目标函数前添个负号即可满足约束条件的解X 称为可行解所有满足条件的X组成问题的可行解空间2 遗传算法基本原理和基本操作遗传算法 Genetic Algorithm GA 是一种非常实用高效鲁棒性强的优化技术广泛应用于工程技术的各个领域如函数优化机器学习图像处理生产调度等遗传算法是模拟生物在自然环境中的遗传和进化过程而形成的一种自适应全局优化算法按照达尔文的进化论生物在进化过程中物竞天择对自然环境适应度高的物种被保留下来适应度差的物种而被淘汰物种通过遗传将这些好的性状复制给下一代同时也通过种间的交配交叉和变异不断产生新的物种以适应环境的变化从总体水平上看生物在进化过程中子代总要比其父代优良因此生物的进化过程其实就是一个不断产生优良物种的过程这和优化设计问题具有惊人的相似性从而使得生物的遗传和进化能够被用于实际的优化设计问题按照生物学知识遗传信息基因Gene 的载体是染色体Chromosome 染色体中一定数量的基因按照一定的规律排列即编码遗传基因在染色体中的排列位置称为基因座Locus在同一个基因座上所有可能的基因就称为等位基因Allele生物所持有的基因以及基因的构成形式称为生物的基因型Genotype而该生物在环境中所呈现的相应性状称为该生物的表现型Phenotype在遗传过程中染色体上的基因能够直接复制给子代从而使得子代具有亲代的特征此外两条染色体之间也通过交叉 Crossover 而重组即两个染色体在某个相同的位置处被截断其前后两串基因交叉组合而形成两个新的染色体在基因复制时也会产生微小的变异Mutation从而也产生了新的染色体因此交叉和变异是产生新物种的主要途径由于自然选择在子代群体新产生的物种或染色体当中只有那些对环境适应度高的才能生存下来即适应度越高的被选择的概率也越大然后又是通过遗传和变异再自然选择一代一代不断进化因此生物遗传和进化的基本过程就是选择即复制交叉和变异遗传算法就是通过模拟生物进化的这几个基本过程而实现的①编码编码是设计遗传算法首要解决的问题在生物进化中选择交叉变异这些基本过程都是基于遗传信息的编码方式进行的即基于染色体的基因型而非表现型因此要模拟生物进化过程遗传算法必须首先对问题的可行解X决策向量进行某种编码以便借鉴生物学中染色体和基因等概念在遗传算法中将每一个决策向量X用一个染色体V来表示3其中每一个vi代表一个基因染色体的长度m不一定等于设计变量的数目n取决于染色体上基因的编码方式一般有两种编码方式二进制编码和浮点数编码如果是二进制编码每一个设计变量xi的真实值用一串二进制符号0和1按照一定的编码规则来表示每个二进制符号就代表一个基因因此染色体长度要远大于设计变量的数目这种由二进制编码构成的排列形式V就是染色体也称个体的基因型而基因型经过解码后所对应的决策向量X即可行解就是个体的表现型如果是浮点数编码每个设计变量用其取值范围内的一个浮点数表示构成染色体的一个基因vi因此个体的编码长度m也就等于决策变量的个数n由于这种编码方式使用的是决策变量的真实值所以也称真值编码方法无论哪种编码方式所有可能的染色体个体V构成问题的搜索空间种群遗传算法对最优解的搜索就是在搜索空间中搜索适应度最高的染色体后面叙述适应度的计算因此通过编码将一个问题的可行解从其解空间转换到了遗传算法能够处理的搜索空间经过个体的编码后就可以进行遗传算法的基本操作选择交叉和变异②选择复制操作选择也就是复制是在群体中选择适应度高的个体产生新群体的过程生物的进化是以集团为主体的与此相应遗传算法的运算对象是有M个个体或染色体组成的集合称为种群M也称为种群规模遗传算法在模拟自然选择时以个体的适应度Fitness高低为选择依据即适应度高的个体被遗传到下一代种群的概率较高而适应度低的个体遗传到下一代的概率则相对较低个体适应度由适应度函数计算适应度函数总是和个体表现型 ie X 的目标函数值f X 关联一般是由目标函数经过一定的变换得到一种最简单的方法就是直接使用目标函数f X 作为适应度函数4选定了适应度函数之后个体适应度也随之确定则在选择操作时个体被选中的概率5其中Fi为个体的适应度这种选择方式称为比例选择也称轮盘赌选择除此之外还有多种选择方法如随机竞争选择均匀选择无回放随机选择等不一一介绍③交叉操作所谓交叉就是以一定的概率交叉概率从群体中选择两个个体染色体按照某种方式交换其部分基因从而形成两个新的个体在遗传算法中它是产生新个体同时也是获得新的优良个体的主要方法它决定了遗传算法的全局搜索能力对于不同的编码方式交叉操作的具体方法也不相同对于浮点数编码一般使用算术交叉对于二进制编码有单点交叉和多点交叉等方式不论何种方式在交叉操作时首先应定义交叉概率Pc这个概率表明种群中参与交叉的个体数目的期望值是M 是种群规模通常交叉概率应取较大的值以便产生较多的新个体增加全局搜索力度但是Pc过大时优良个体被破坏的可能性也越大如果Pc 太小则搜索进程变慢影响算法的运行效率一般建议的取值范围是04–099④变异操作遗传算法中的变异操作就是将染色体上某些基因座上的基因以一定的变异概率Pm用其他的等位基因替代从而形成新的个体对于浮点数编码变异操作就是将变异点处的基因用该基因取值范围内的一个随机数替换对于二进制编码则是将变异点处的基因由1变成00变成1变异操作也有多种方法如均匀变异非均匀变异高斯变异等变异操作的概率Pm要比交叉操作的概率Pc小得多变异只是产生新个体的辅助手段但它是遗传算法必不可少的一个环节因为变异操作决定了算法的局部搜索能力它弥补了交叉操作无法对搜索空间的细节进行局部搜索的不足因此交叉和变异操作相互配合共同完成对搜索空间的全局和局部搜索以上简要介绍了遗传算法的基本原理和操作归纳起来基本遗传算法一般可以表示为一个8元组6式中C 个体的编码方法E 个体适应度评价函数P0 初始种群M 种群规模选择操作交叉操作变异操作是进化终止代数进化终止条件其中有4个运行参数需要预先设定M T PcPm 种群规模M一般取为20100 终止代数T一般取100500交叉概率Pc一般取04099 变异概率Pm一般取0000101最后给出遗传算法的基本步骤①选择二进制编码或浮点数编码把问题的解表示成染色体②随机产生一群染色体个体也就是初始种群③计算每一个个体的适应度值按适者生存的原则从中选择出适应度较大的染色体进行复制再通过交叉变异过程产生更适应环境的新一代染色体群即子代④重复第3步经过这样的一代一代地进化最后就会收敛到最适应环境适应度最大的一个染色体即个体上它就是问题的最优解图2给出了基本遗传算法设计流程图其中t代表当前代数T是进化终止代数图2 基本遗传算法设计流程图3 Matlab遗传算法工具箱 gatoolMatlab的遗传算法工具箱有一个精心设计的图形用户界面可以帮助用户直观方便快速地利用遗传算法求解最优化问题在Matlab命令窗口输入命令gatool可以打开遗传算法工具箱的图形用户界面如图3所示GA工具箱的参数设置步骤如下图3 遗传算法工具1 首先使用遗传算法工具箱必须输入下列信息Fitness function 适应度函数这里指的是待优化的函数也即目标函数该工具箱总是试图寻找目标函数的最小值输入适应度函数的格式为fitnessfun其中符号产生函数fitnessfun的句柄fitnessfun代表用户编写的计算适应度函数目标函数的M文件名该M文件的编写方法如下假定我们要计算Rastrigin函数的最小值7M函数文件确定这个函数必须接受一个长度为2的行向量X也即决策向量向量的长度等于变量数目行向量X的每个元素分别和变量x1和x2对应另外M文件要返回一个标量Z其值等于该函数的值下面是计算Rastrigin函数的M文件代码function Z Ras_fun XZ 20X 1 2X 2 2-10 cos 2piX 1 cos 2piX 2M文件编写保存后再在gatool工具箱界面Fitness function栏输入 Ras_funNumber of variable 变量个数目标函数中的变量数目也即适应度函数输入向量的长度在上例中它的值是22 其次设置遗传算法参数即Options设置以下只介绍部分运行参数的设置其他未提及的参数采用默认设置即可①种群参数 PopulationPopulation size 种群规模每一代中的个体数目一般是20-100之间种群规模大算法搜索更彻底可以增加算法搜索全局最优而非局部最优的概率但是耗时也更长Initial range 初始范围其值是两行的矩阵代表初始种群中个体的搜索范围实际上是决策向量X中每个变量xi的初始搜索范围矩阵的列数等于变量个数Number of variable第一行是每个变量的下限第二行是每个变量的上限如果只输入2 1的矩阵则每个变量的初始搜索范围都一样注意初始范围仅限定初始种群中个体或决策向量的范围后续各代中的个体可以不在初始范围之内初始范围不能设置太小否则造成个体之间的差异过小即种群的多样性降低不利于算法搜索到最优解②复制参数 ReproductionCrossover fraction 交叉概率一般取04099默认08③算法终止准则 Stopping Criteria提供了5种算法终止条件Generations最大的进化代数一般取100500默认是100当遗传算法运行到该参数指定的世代计算终止Time limit指明算法终止执行前的最大时间单位是秒缺省是Inf 无穷大Fitness limit 适应度限当最优适应度值小于或等于此参数值时计算终止缺省是-InfStall generation 停滞代数如果每一代的最佳适应度值在该参数指定的代数没有改善则终止计算缺省是50代Stall time 停滞时间如果每一代的最佳适应度值在该参数指定的时间间隔内没有改善则终止计算缺省是20秒3 设置绘图参数即Plots设置绘图参数Plots工作时可以从遗传算法得到图形数据当选择各种绘图参数并执行遗传算法时一个图形窗口在分离轴上显示这些图形下面介绍其中2个参数Best fitness 选择该绘图参数时将绘制每一代的最佳适应度值和进化世代数之间的关系图如图4的上图所示图中蓝色点代表每一代适应度函数的平均值黑色点代表每一代的最佳值Distance 选择此参数时绘制每一代中个体间的平均距离它反映个体之间的差异程度所以可用来衡量种群的多样性图4的下图显示的即是每一代个体间的平均距离图44 执行算法参数设置好了之后点击工具箱界面上的按钮Star 执行求解器在算法运行的同时Current generation当前代数文本框中显示当前的进化代数通过单击Pause按钮可以使计算暂停之后再点击Resume可以恢复计算当计算完成时Status and results窗格中出现如图5所示的情形图5其中包含下列信息算法终止时适应度函数的最终值即目标函数的最优值Fitness function value 0003909079476983379算法终止原因Optimization terminated imum number of generations exceeded 超出最大进化世代数最终点即目标函数的最优解[x1 x2] [-0004 -000193]两个变量的例子三实验内容1 Rastrigin函数的最小值问题函数表达式如 7 式函数图像如下图6所示它有多个局部极小值但是只有一个全局最小值Rastrigin函数的全局最小值的精确解是0出现在[x1 x2] [0 0]处图6 Rastrigin函数图像使用遗传算法工具箱近似求解Rastrigin函数的最小值首先编写计算适应度函数的M文件然后设置运行参数绘图参数Plots勾选Best fitness和Distance两项其它参数可以使用默认值执行求解器Run solver计算Rastrigin函数的最优值观察种群多样性对优化结果的影响决定遗传算法的一个重要性能是种群的多样性个体之间的距离越大则多样性越高反之则多样性越低多样性过高或过低遗传算法都可能运行不好通过实验调整Population 种群的Initial range 初始范围参数可得到种群适当的多样性取Initial range参数值[1 11]观察Rastrigin函数最小值的计算结果取Initial range参数值[1 100]观察Rastrigin函数最小值的计算结果取Initial range参数值[1 2]观察Rastrigin函数最小值的计算结果2 微带电极欧姆损耗的优化微带电极的欧姆损耗公式可由 1 式表示令设计变量[WDt] [x1 x2 x3] X变量的约束条件如下8根据 1 式和 8 式使用遗产算法工具箱优化设计电极的结构参数W 宽度 D 间距 t 厚度使得电极的欧姆损耗最小 1 式中用到的常数提示对约束条件 8 式的处理可以在编写计算适应度函数的M文件中实现方法是在M文件中引入对每个输入变量值范围的判断语句如果任一变量范围超出 8 式的限制则给该个体的适应度施加一个惩罚使得该个体被遗传到下一代的概率减小甚至为0一般可用下式对个体适应度进行调整9其中F x 是原适应度F x 是调整后的适应度P x 是罚函数为简单计本问题中我们可以给个体的适应度 com件的返回值Z 加上一个很大的数即可如正无穷Inf四思考题1 在遗传算法当中个体的变异对结果有何影响如果没有变异结果又将如何试以Rastrigin函数最小值的计算为例说明取变异概率为0即交叉概率Crossover fraction 102 遗传算法工具箱针对的是最小化函数值问题如果要利用该工具箱计算函数的最大值该如何实现。
基于改进遗传算法的无人机路径规划
2021⁃02⁃10计算机应用,Journal of Computer Applications 2021,41(2):390-397ISSN 1001⁃9081CODEN JYIIDU http ://基于改进遗传算法的无人机路径规划黄书召1*,田军委2,乔路2,王沁2,苏宇2(1.西安工业大学电子信息工程学院,西安710021;2.西安工业大学机电工程学院,西安710021)(∗通信作者1945980733@ )摘要:针对传统遗传算法收敛速度慢、容易陷入局部最优、规划路径不够平滑、代价高等问题,提出了一种基于改进遗传算法的无人机(UAV )路径规划方法,该算法对遗传算法的选择算子、交叉算子和变异算子进行改进,从而规划出平滑、可飞的路径。
首先,建立适合UAV 田间信息获取的环境模型,并考虑UAV 的目标函数与约束条件以建立适合本场景的更为复杂、精确的数学模型;然后,提出了混合无重串选择算子、非对称映射交叉算子和启发式多次变异算子,寻找最优路径以及扩大种群搜索范围;最后,采用三次B 样条曲线对规划出的路径进行平滑,得到平滑的飞行路径,并且减少了算法的计算时间。
实验结果表明,与传统遗传算法相比,所提算法的代价值降低了68%,收敛迭代次数减少了67%;相较蚁群优化(ACO )算法,其代价值降低了55%,收敛迭代次数减少了58%。
通过大量对比实验得出,当交叉率的值为(1/染色体长度)时,算法的收敛效果最好。
在不同环境下进行算法性能测试,结果表明所提算法具有很好的环境适应性,适合于复杂环境下的路径规划。
关键词:遗传算法;无人机;交叉算子;B 样条曲线;路径规划中图分类号:TP181;TP13文献标志码:AUnmanned aerial vehicle path planning based on improved genetic algorithmHUANG Shuzhao 1*,TIAN Junwei 2,QIAO Lu 2,WANG Qin 2,SU Yu 2(1.School of Electronic Information Engineering ,Xi ’an Technological University ,Xi ’an Shaanxi 710021,China ;2.School of Mechatronic Engineering ,Xi ’an Technological University ,Xi ’an Shaanxi 710021,China )Abstract:In order to solve the problems such as slow convergence speed ,falling into local optimum easily ,unsmoothplanning path and high cost of traditional genetic algorithm ,an Unmanned Aerial Vehicle (UAV )path planning method based on improved Genetic Algorithm (GA )was proposed.The selection operator ,crossover operator and mutation operator of genetic algorithm were improved to planning a smooth and effective flight path.Firstly ,an environment model suitable forthe field information acquisition of UAV was established ,and a more complex and accurate mathematical model suitable for this scene was established by considering the objective function and constraints of UAV.Secondly ,the hybrid non -multi -string selection operator ,asymmetric mapping crossover operator and heuristic multi -mutation operator were proposed to find the optimal path and expand the search range of the population.Finally ,a cubic B -spline curve was used to smooth the planned path to obtain a smooth flight path and reduce the calculation time of the algorithm.Experimental results show that ,compared with the traditional GA ,the cost value of the proposed algorithm was reduced by 68%,and the number of convergence iterations was reduced by 67%;compared with the Ant Colony Optimization (ACO )algorithm ,its cost value was reduced by 55%and the number of convergence iterations was reduced by 58%.Through a large number of comparison experiments ,it is concluded that when the value of the crossover rate is the reciprocal of chromosome size ,the proposed algorithm has the best convergence effect.After testing the algorithm performance in different environments ,it can be seenthat the proposed algorithm has good environmental adaptability and is suitable for path planning in complex environments.Key words:genetic algorithm;Unmanned Aerial Vehicle (UAV);crossover operator;B -spline curve;path planning 0引言近年来,受益于轻型高分子材料的发现以及嵌入式、自动化、信号处理、无线通信等技术的发展与成熟,无人机(Unmanned Aerial Vehicle,UAV)在田间信息获取、农业植保、设施巡检、物流配送[1-2]等场景中广受青睐。
基于改进遗传算法的工业机器人路径规划研究

基于改进遗传算法的工业机器人路径规划研究随着工业自动化的不断普及,工业机器人的应用范围越来越广泛。
而在工业机器人的操作中,路径规划是非常重要的一环。
如果路径规划不仅高效而且安全,则工业生产的效率可以得到很大的提高。
目前,针对机器人路径规划的研究大多基于遗传算法。
然而,由于遗传算法的一些局限性,其效率并不尽如人意。
因此,为了提高机器人路径规划的质量和效率,本文对遗传算法进行改进,并探讨其在工业机器人路径规划中的应用。
一、遗传算法在工业机器人路径规划中的应用遗传算法是一种在计算机科学和人工智能领域中广泛应用的优化算法。
它通过模拟自然进化过程,从而在复杂的搜索空间中搜索最优解。
在机器人路径规划问题中,遗传算法主要应用于寻找最短路径或者最优路径。
其具体流程如下:1. 初始化种群:从随机的起点和终点开始,生成一定数量的个体(即路径),并将它们组成一个初始种群。
2. 适应度函数:根据路径的长度,计算每个个体的适应度值。
适应度值越优秀的个体,被选中的概率也越大。
3. 选择操作:根据适应度对所有个体进行选择,选择算子可以使环境保持多样化,达到探索多种可能的目的。
4. 交叉操作:在被选择的个体中进行随机的交叉操作,以产生新的个体。
交叉操作的目的在于增强群体的多样性和优化搜索效率。
5. 变异操作:在产生的个体中,进行随机的变异操作。
一般而言,变异概率是极小的,因为变异一次很有可能使得适应度下降。
6. 重复上述步骤:重新计算每个个体的适应度值、选择重新生成新的个体,如此反复,直到满足停止条件,即找到最优或者达到迭代次数。
基于遗传算法的机器人路径规划问题,虽然在处理简单问题时有效,但是当搜索空间复杂度提高以后,遗传算法会出现局限性,即陷入局部最优解。
为了解决这一问题,本文提出了基于改进遗传算法的工业机器人路径规划。
二、改进遗传算法在工业机器人路径规划中的应用针对遗传算法出现的局限性,在工业机器人路径规划中引入了两个改进的措施:仿射变换和差分进化。
基于遗传算法的路径优化方法研究及其实现

基于遗传算法的路径优化方法研究及其实现引言:路径优化是一个常见的优化问题,它在很多领域都有广泛的应用,比如物流配送、车辆路径规划、网络路由等。
而遗传算法是一种模拟生物进化过程的启发式优化算法,通过模拟自然选择和遗传机制来搜索最优解。
本文将围绕基于遗传算法的路径优化方法展开研究,并提出一种实现方案。
一、遗传算法基础概念1.1 遗传算法原理遗传算法源于对达尔文生物进化理论的模拟,通过模拟生物的遗传、变异、适应性选择等过程来优化问题的解。
1.2 遗传算法流程遗传算法的基本流程包括初始化种群、选择操作、交叉操作、变异操作和终止条件判断等步骤。
1.3 遗传算法参数遗传算法的性能受到参数选择的影响,其中包括种群大小、交叉概率、变异概率等。
二、路径优化问题描述2.1 问题定义路径优化问题是指在给定的图中,找到一条路径使得满足一定的约束条件的情况下,路径的总长度最短。
2.2 适应度函数为了能够将路径优化问题转化为遗传算法的优化问题,我们需要定义一个适应度函数来衡量每个个体(路径)的优劣。
三、基于遗传算法的路径优化方法3.1 编码设计在遗传算法中,需要将问题的解(路径)进行编码。
常见的编码方式包括二进制编码、浮点数编码和排列编码等。
根据问题的特点选择合适的编码方式。
3.2 初始化种群在遗传算法中,初始化种群的质量直接影响到算法的性能。
一般情况下,可以根据问题的约束条件和启发式方法来生成初始种群。
3.3 选择操作选择操作是遗传算法中最为重要的一步,目的是根据适应度函数的值选择较优的个体。
常见的选择方法包括轮盘赌选择、锦标赛选择等。
3.4 交叉操作交叉操作是遗传算法的特点之一,通过交叉两个个体的染色体来生成新的个体。
在路径优化问题中,可以采用部分映射交叉、顺序交叉等方式进行操作。
3.5 变异操作变异操作是为了增加种群的多样性,防止算法陷入局部最优解。
在路径优化问题中,可以通过交换、插入、反转等方式进行变异操作。
3.6 终止条件判断终止条件判断是遗传算法运行的结束条件。
Matlab中的遗传算法实现与优化
Matlab中的遗传算法实现与优化引言遗传算法是一种模拟生物遗传和自然选择的计算方法,被广泛应用于优化和搜索问题。
在Matlab中,我们可以利用其强大的编程功能和优秀的优化工具箱来实现和优化遗传算法。
一、遗传算法简介遗传算法的基本思想是通过模拟自然选择和遗传操作,逐步演化出最优解。
它包含了种群的初始化、适应度评估、选择、交叉和变异等步骤。
1. 种群初始化在遗传算法开始前,我们需要初始化一个种群。
每个个体都表示一个可能的解。
个体的表达方式可以是二进制、浮点数等。
2. 适应度评估适应度函数用于评估每个个体的适应度,即其解决问题的能力。
适应度函数可以根据具体问题进行设计。
例如,对于求解最优化问题,适应度函数可以是目标函数的值。
3. 选择选择操作根据个体的适应度,以一定的概率选择父代个体。
适应度高的个体被选中的概率更大,从而保留优秀的基因。
4. 交叉交叉操作模拟了基因的杂交。
通过对两个个体的基因进行交叉,产生新的子代个体。
交叉操作可以保留原始个体的优点,同时引入新的变化。
5. 变异变异操作模拟了基因的突变。
通过对个体的基因进行随机变化,引入新的多样性。
变异操作有助于避免陷入局部最优解。
6. 迭代优化通过重复进行选择、交叉和变异,逐步优化种群中的个体,直到满足停止准则。
二、Matlab中的遗传算法实现在Matlab中,我们可以使用优化工具箱中的遗传算法函数来实现和优化遗传算法。
1. 遗传算法函数Matlab中的遗传算法函数包括`ga`、`gamultiobj`和`patternsearch`等。
其中,`ga`是最常用的单目标遗传算法函数,而`gamultiobj`用于多目标优化问题。
`ga`函数的基本调用形式为:```[x, fval] = ga(fun, nvars)```其中,`fun`为适应度函数,`nvars`为变量的个数。
`ga`函数会返回最优解`x`和最优值`fval`。
2. 适应度函数的设计适应度函数的设计对于遗传算法的性能至关重要。
遗传算法解决非线性规划问题的Matlab程序
非线性整数规划的遗传算法Matlab程序(附图)通常,非线性整数规划是一个具有指数复杂度的NP问题,如果约束较为复杂,Matlab 优化工具箱和一些优化软件比如lingo等,常常无法应用,即使能应用也不能给出一个较为令人满意的解。
这时就需要针对问题设计专门的优化算法。
下面举一个遗传算法应用于非线性整数规划的编程实例,供大家参考!模型的形式和适应度函数定义如下:这是一个具有200个01决策变量的多目标非线性整数规划,编写优化的目标函数如下,其中将多目标转化为单目标采用简单的加权处理。
function Fitness=FITNESS(x,FARM,e,q,w)%% 适应度函数% 输入参数列表% x 决策变量构成的4×50的0-1矩阵% FARM 细胞结构存储的当前种群,它包含了个体x% e 4×50的系数矩阵% q 4×50的系数矩阵% w 1×50的系数矩阵%%gamma=0.98;N=length(FARM);%种群规模F1=zeros(1,N);F2=zeros(1,N);for i=1:Nxx=FARM{i};ppp=(1-xx)+(1-q).*xx;F1(i)=sum(w.*prod(ppp));F2(i)=sum(sum(e.*xx));endppp=(1-x)+(1-q).*x;f1=sum(w.*prod(ppp));f2=sum(sum(e.*x));Fitness=gamma*sum(min([sign(f1-F1);zeros(1,N)]))+(1-gamma)*sum(mi n([sign(f2-F2);zeros(1,N)]));针对问题设计的遗传算法如下,其中对模型约束的处理是重点考虑的地方function [Xp,LC1,LC2,LC3,LC4]=MYGA(M,N,Pm)%% 求解01整数规划的遗传算法%% 输入参数列表% M 遗传进化迭代次数% N 种群规模% Pm 变异概率%% 输出参数列表% Xp 最优个体% LC1 子目标1的收敛曲线% LC2 子目标2的收敛曲线% LC3 平均适应度函数的收敛曲线% LC4 最优适应度函数的收敛曲线%% 参考调用格式[Xp,LC1,LC2,LC3,LC4]=MYGA(50,40,0.3)%% 第一步:载入数据和变量初始化load eqw;%载入三个系数矩阵e,q,w%输出变量初始化Xp=zeros(4,50);LC1=zeros(1,M);LC2=zeros(1,M);LC3=zeros(1,M);LC4=zeros(1,M);Best=inf;%% 第二步:随机产生初始种群farm=cell(1,N);%用于存储种群的细胞结构k=0;while k %以下是一个合法个体的产生过程x=zeros(4,50);%x每一列的1的个数随机决定for i=1:50R=rand;Col=zeros(4,1);if R<0.7RP=randperm(4);%1的位置也是随机的Col(RP(1))=1;elseif R>0.9RP=randperm(4);Col(RP(1:2))=1;elseRP=randperm(4);Col(RP(1:3))=1;endx(:,i)=Col;end%下面是检查行和是否满足约束的过程,对于不满足约束的予以抛弃 Temp1=sum(x,2);Temp2=find(Temp1>20);if length(Temp2)==0k=k+1;farm{k}=x;endend%% 以下是进化迭代过程counter=0;%设置迭代计数器while counter%% 第三步:交叉%交叉采用双亲双子单点交叉newfarm=cell(1,2*N);%用于存储子代的细胞结构Ser=randperm(N);%两两随机配对的配对表A=farm{Ser(1)};%取出父代AB=farm{Ser(2)};%取出父代BP0=unidrnd(49);%随机选择交叉点a=[A(:,1:P0),B(:,(P0+1):end)];%产生子代ab=[B(:,1:P0),A(:,(P0+1):end)];%产生子代bnewfarm{2*N-1}=a;%加入子代种群newfarm{2*N}=b;%以下循环是重复上述过程for i=1:(N-1)A=farm{Ser(i)};B=farm{Ser(i+1)};P0=unidrnd(49);a=[A(:,1:P0),B(:,(P0+1):end)];b=[B(:,1:P0),A(:,(P0+1):end)];newfarm{2*i-1}=a;newfarm{2*i}=b;endFARM=[farm,newfarm];%新旧种群合并%% 第四步:选择复制FLAG=ones(1,3*N);%标志向量,对是否满足约束进行标记%以下过程是检测新个体是否满足约束for i=1:(3*N)x=FARM{i};sum1=sum(x,1);sum2=sum(x,2);flag1=find(sum1==0);flag2=find(sum1==4);flag3=find(sum2>20);if length(flag1)+length(flag2)+length(flag3)>0FLAG(i)=0;%如果不满足约束,用0加以标记endendNN=length(find(FLAG)==1);%满足约束的个体数目,它一定大于等于N NEWFARM=cell(1,NN);%以下过程是剔除不满主约束的个体kk=0;for i=1:(3*N)if FLAG(i)==1kk=kk+1;NEWFARM{kk}=FARM{i};endend%以下过程是计算并存储当前种群每个个体的适应值SYZ=zeros(1,NN);syz=zeros(1,N);for i=1:NNx=NEWFARM{i};SYZ(i)=FITNESS2(x,NEWFARM,e,q,w);%调用适应值子函数endk=0;%下面是选择复制,选择较优的N个个体复制到下一代while k minSYZ=min(SYZ);posSYZ=find(SYZ==minSYZ);POS=posSYZ(1);k=k+1;farm{k}=NEWFARM{POS};syz(k)=SYZ(POS);SYZ(POS)=inf;end%记录和更新,更新最优个体,记录收敛曲线的数据minsyz=min(syz);meansyz=mean(syz);pos=find(syz==minsyz);LC3(counter+1)=meansyz;if minsyz Best=minsyz;Xp=farm{pos(1)};endLC4(counter+1)=Best;ppp=(1-Xp)+(1-q).*Xp;LC1(counter+1)=sum(w.*prod(ppp));LC2(counter+1)=sum(sum(e.*Xp));%% 第五步:变异for i=1:Nif Pm>rand%是否变异由变异概率Pm控制AA=farm{i};%取出一个个体POS=unidrnd(50);%随机选择变异位R=rand;Col=zeros(4,1);if R<0.7RP=randperm(4);Col(RP(1))=1;elseif R>0.9RP=randperm(4);Col(RP(1:2))=1;elseRP=randperm(4);Col(RP(1:3))=1;end%下面是判断变异产生的新个体是否满足约束,如果不满足,此次变异无效 AA(:,POS)=Col;Temp1=sum(AA,2);Temp2=find(Temp1>20);if length(Temp2)==0farm{i}=AA;endendendcounter=counter+1end%第七步:绘收敛曲线图figure(1);plot(LC1);xlabel('迭代次数');ylabel('子目标1的值');title('子目标1的收敛曲线'); figure(2);plot(LC2);xlabel('迭代次数');ylabel('子目标2的值');title('子目标2的收敛曲线'); figure(3);plot(LC3);xlabel('迭代次数');ylabel('适应度函数的平均值');title('平均适应度函数的收敛曲线'); figure(4);plot(LC4);xlabel('迭代次数');ylabel('适应度函数的最优值');title('最优适应度函数的收敛曲线');贴出一幅运行得到的收敛曲线。
遗传算法多目标优化matlab源代码

遗传算法多目标优化matlab源代码遗传算法(Genetic Algorithm,GA)是一种基于自然选择和遗传学原理的优化算法。
它通过模拟生物进化过程,利用交叉、变异等操作来搜索问题的最优解。
在多目标优化问题中,GA也可以被应用。
本文将介绍如何使用Matlab实现遗传算法多目标优化,并提供源代码。
一、多目标优化1.1 多目标优化概述在实际问题中,往往存在多个冲突的目标函数需要同时优化。
这就是多目标优化(Multi-Objective Optimization, MOO)问题。
MOO不同于单一目标优化(Single Objective Optimization, SOO),因为在MOO中不存在一个全局最优解,而是存在一系列的Pareto最优解。
Pareto最优解指的是,在不降低任何一个目标函数的情况下,无法找到更好的解决方案。
因此,在MOO中我们需要寻找Pareto前沿(Pareto Front),即所有Pareto最优解组成的集合。
1.2 MOO方法常见的MOO方法有以下几种:(1)加权和法:将每个目标函数乘以一个权重系数,并将其加和作为综合评价指标。
(2)约束法:通过添加约束条件来限制可行域,并在可行域内寻找最优解。
(3)多目标遗传算法:通过模拟生物进化过程,利用交叉、变异等操作来搜索问题的最优解。
1.3 MOO评价指标在MOO中,我们需要使用一些指标来评价算法的性能。
以下是常见的MOO评价指标:(1)Pareto前沿覆盖率:Pareto前沿中被算法找到的解占总解数的比例。
(2)Pareto前沿距离:所有被算法找到的解与真实Pareto前沿之间的平均距离。
(3)收敛性:算法是否能够快速收敛到Pareto前沿。
二、遗传算法2.1 遗传算法概述遗传算法(Genetic Algorithm, GA)是一种基于自然选择和遗传学原理的优化算法。
它通过模拟生物进化过程,利用交叉、变异等操作来搜索问题的最优解。
遗传算法MATLAB程序设计

摘自Matlab在数学建模中的应用,北航出版社,2011.44.2遗传算法MATLAB程序设计4.2.1程序设计流程及参数选取4.2.1.1遗传算法程序设计伪代码BEGINt = 0 ; %Generations NO.初始化P(t) ; %Initial Population or Chromosomes计算P(t) 的适应值;while (不满足停止准则) dobegint = t+1 ;从P(t-1)中选择P(t) ; % Selection重组P(t) ; % Crossover and Mutation计算P(t) 的适应值;endEND4.2.1.2遗传算法的参数设计原则在单纯的遗传算法当中,也并不总是收敛,即使在单峰或单调也是如此。
这是因为种群的进化能力已经基本丧失,种群早熟。
为了避免种群的早熟,参数的设计一般遵从以下原则[5]:(1)种群的规模:当群体规模太小时,很明显会出现近亲交配,产生病态基因。
而且造成有效等位基因先天缺乏,即使采用较大概率的变异算子,生成具有竞争力高阶模式的可能性仍很小,况且大概率变异算子对已有模式的破坏作用极大。
同时遗传算子存在随机误差(模式采样误差),妨碍小群体中有效模式的正确传播,使得种群进化不能按照模式定理产生所预测的期望数量;种群规模太大,结果难以收敛且浪费资源,稳健性下降。
种群规模的一个建议值为0~100。
(2)变异概率:当变异概率太小时,种群的多样性下降太快,容易导致有效基因的迅速丢失且不容易修补;当变异概率太大时,尽管种群的多样性可以得到保证,但是高阶模式被破坏的概率也随之增大。
变异概率一般取0.0001~0.2。
(3)交配概率:交配是生成新种群最重要的手段。
与变异概率类似,交配概率太大容易破坏已有的有利模式,随机性增大,容易错失最优个体;交配概率太小不能有效更新种群。
交配概率一般取0.4~0.99。
(4)进化代数:进化代数太小,算法不容易收敛,种群还没有成熟;代数太大,算法已经熟练或者种群过于早熟不可能再收敛,继续进化没有意义,只会增加时间开支和资源浪费。
遗传算法及其MATLAB实现
Y
输出结果 终止
N
计算群体中各个体适应度 从左至右依次执行遗传算子
pm
j=0 选择个体变异点 执行变异
pc
j=0 根据适应度选择复制个体 执行复制
j=0 选择两个交叉个体 执行交叉 将交叉后的两个新个体 添入新群体中 j = j+2
将复制的个体添入 新群体中
j = j+1
将变异后的个体添入 新群体中
发展
遗传算法——进化计算——计算智能——人工智能 70年代初,Holland提出了“模式定理”(Schema Theorem),一般认为是“遗 传算法的基本定理”,从而奠定了遗传算法研究的理论基础; 1985年,在美国召开了第一届遗传算法国际会议,并且成立了国际遗传算法学会 (ISGA,International Society of Genetic Algorithms); 1989年,Holland的学生D. J. Goldherg出版了“Genetic Algorithms in Search, Optimization, and Machine Learning”,对遗传算法及其应用作了全面而系统的论 述; 1991年,L. Davis编辑出版了《遗传算法手册》,其中包括了遗传算法在工程技术 和社会生活中大量的应用实例。
⑦倒位运算:对一复杂的问题可能需要用到“倒位”。倒位是指 一个染色体某区段正常排列顺序发生 的颠倒造成染色体内的 180
。
DNA序列重新排列,它包括臂内倒位和臂间倒位。 例:染色体S=1001011011101110011010101001划线部分倒位得 ' S =100101100101001110111101001
'
'
首先用随机数产生一个或多个交配点位置,然后两个个体在交配 点位置互换部分基因码形成两个子个体。 例:有两条染色体S 01001011 ,S 10010101 交换后4位基因得 ,S 10011011 S 01000101 可以被看成是原染色体 S1 和S 2 的子代染色体。
基于改进A

第 22卷第 11期2023年 11月Vol.22 No.11Nov.2023软件导刊Software Guide基于改进A*算法的物流无人机航迹规划研究陈继伟,包长春,赵子恒(内蒙古工业大学航空学院,内蒙古呼和浩特 010051)摘要:针对A*算法在无人机物流配送环境下,路径规划存在地图庞大导致运算内存消耗大、计算时间长等问题,提出一种改进A*算法。
该方法包括融入跳点搜索算法搜索策略、设计起点搜索方法、改进算法启发函数,通过构建不同尺寸的地图对A*算法、跳点搜索算法、改进A*算法进行仿真分析。
结果表明,改进A*算法保持了A*算法的最优路径,搜索时间相较于A*算法平均减少90%,相较于跳点搜索算法平均减少55%,证实了改进A*算法的高效性和可行性。
关键词:物流配送;路径规划;A*算法;跳点搜索算法;最优路径DOI:10.11907/rjdk.222449开放科学(资源服务)标识码(OSID):中图分类号:V279;TP18 文献标识码:A文章编号:1672-7800(2023)011-0123-06 Research on Route Planning of Logistics UAV Based on Improved A * AlgorithmCHEN Jiwei, BAO Changchun, ZHAO Ziheng(College of Aviation, Inner Mongolia University of Technology, Hohhot 010051, China)Abstract:An improved A * algorithm is proposed to address the problems of large map size, high computational memory consumption, and long computational time in path planning for unmanned aerial vehicle logistics delivery environments. This method includes incorporating a jump point search algorithm search strategy, designing a starting point search method, improving the algorithm heuristic function, and simulat‑ing and analyzing the A * algorithm, jump point search algorithm, and improved A * algorithm by constructing maps of different sizes. The re‑sults show that the improved A * algorithm maintains the optimal path of A * algorithm, with an average reduction of 90% in search time com‑pared to A * algorithm and 55% in jump point search algorithm, confirming the efficiency and feasibility of the improved A * algorithm. Key Words:logistics distribution; path planning; A* algorithm; jump point search algorithm; optimal path0 引言随着科学技术和人民生活水平提高,无人机不仅广泛应用在航拍、特技表演等领域,而且应用在物流配送领域,具有配送效率高、成本低、适应性强等突出优点,在低空飞行中不易受复杂路况影响,可实现较快速度运输,极大节约了人力成本。
基于遗传算法的优化设计论文[5篇]
![基于遗传算法的优化设计论文[5篇]](https://img.taocdn.com/s3/m/cad20e2c974bcf84b9d528ea81c758f5f61f2985.png)
基于遗传算法的优化设计论文[5篇]第一篇:基于遗传算法的优化设计论文1数学模型的建立影响抄板落料特性的主要因素有:抄板的几何尺寸a和b、圆筒半径R、圆筒的转速n、抄板安装角β以及折弯抄板间的夹角θ等[4,9]。
在不同的参数a、β、θ下,抄板的安装会出现如图1所示的情况。
图1描述了不同参数组合下抄板的落料特性横截面示意图。
其中,图1(a)与图1(b)、图1(c)、图1(d)的区别在于其安装角为钝角。
当安装角不为钝角且OB与OC的夹角σ不小于OD与OC夹角ψ时(即σ≥ψ),会出现图1(b)所示的安装情况;当σ<ψ时,又会出现图1(c)与图1(d)所示的情况,而两者区别在于,η+θ是否超过180°,若不超过,则为图1(c)情况,反之则为图1(d)情况。
其中,点A为抄板上物料表面与筒壁的接触点或为物料表面与抄板横向长度b边的交点;点B为抄板的顶点;点C为抄板折弯点;点D为抄板边与筒壁的交点;点E为OB连线与圆筒内壁面的交点;点F为OC连线与圆筒内壁面的交点。
1.1动力学休止角(γ)[4,10]抄板上的物料表面在初始状态时保持稳定,直到物料表面与水平面的夹角大于物料的休止角(最大稳定角)时才发生落料情况。
随着转筒的转动,抄板上物料的坡度会一直发生改变。
当物料的坡度大于最大稳定角时,物料开始掉落。
此时,由于物料的下落,物料表面重新达到最大稳定角开始停止掉落。
然而,抄板一直随着转筒转动,使得抄板内物料的坡度一直发生改变,物料坡度又超过最大休止角。
这个过程一直持续到抄板转动到一定位置(即抄板位置处于最大落料角δL时),此时抄板内的物料落空。
通常,在计算抄板持有量时,会采用动力学休止角来作为物料发生掉落的依据,即抄板内的物料坡度超过γ时,物料开始掉落。
该角主要与抄板在滚筒中的位置δ、动摩擦因数μ和弗劳德数Fr等有关。
1.2抄板持有量的计算随着抄板的转动,一般可以将落料过程划分为3部分(R-1,R-2,R-3),如图1(a)所示。
Matlab 遗传算法及实例
Matlab遗传算法及实例Matlab遗传算法工具箱函数及实例讲解转:最近研究了一下遗传算法,因为要用遗传算法来求解多元非线性模型。
还好用遗传算法的工具箱予以实现了,期间也遇到了许多问题。
借此与大家分享一下。
首先,我们要熟悉遗传算法的基本原理与运算流程。
基本原理:遗传算法是一种典型的启发式算法,属于非数值算法范畴。
它是模拟达尔文的自然选择学说和自然界的生物进化过程的一种计算模型。
它是采用简单的编码技术来表示各种复杂的结构,并通过对一组编码表示进行简单的遗传操作和优胜劣汰的自然选择来指导学习和确定搜索的方向。
遗传算法的操作对象是一群二进制串(称为染色体、个体),即种群,每一个染色体都对应问题的一个解。
从初始种群出发,采用基于适应度函数的选择策略在当前种群中选择个体,使用杂交和变异来产生下一代种群。
如此模仿生命的进化进行不断演化,直到满足期望的终止条件。
运算流程:Step1:对遗传算法的运行参数进行赋值。
参数包括种群规模、变量个数、交叉概率、变异概率以及遗传运算的终止进化代数。
Step2:建立区域描述器。
根据轨道交通与常规公交运营协调模型的求解变量的约束条件,设置变量的取值范围。
Step3:在Step2的变量取值范围内,随机产生初始群体,代入适应度函数计算其适应度值。
Step4:执行比例选择算子进行选择操作。
Step5:按交叉概率对交叉算子执行交叉操作。
Step6:按变异概率执行离散变异操作。
Step7:计算Step6得到局部最优解中每个个体的适应值,并执行最优个体保存策略。
Step8:判断是否满足遗传运算的终止进化代数,不满足则返回Step4,满足则输出运算结果。
其次,运用遗传算法工具箱。
运用基于Matlab的遗传算法工具箱非常方便,遗传算法工具箱里包括了我们需要的各种函数库。
目前,基于Matlab的遗传算法工具箱也很多,比较流行的有英国设菲尔德大学开发的遗传算法工具箱GATBX、GAOT以及Math Works公司推出的GADS。
11基于遗传算法的机器人路径规划MATLAB源代码(可编辑)

11基于遗传算法的机器人路径规划MATLAB源代码基于遗传算法的机器人路径规划MATLAB源代码基本思路是取各障碍物顶点连线的中点为路径点相互连接各路径点将机器人移动的起点和终点限制在各路径点上利用最短路径算法来求网络图的最短路径找到从起点P1到终点Pn的最短路径上述算法使用了连接线中点的条件因此不是整个规划空间的最优路径然后利用遗传算法对找到的最短路径各个路径点Pi i 12n 调整让各路径点在相应障碍物端点连线上滑动利用Pi Pi1ti×Pi2-Pi1 ti∈[01] i 12n即可确定相应的Pi即为新的路径点连接此路径点为最优路径function [L1XY1L2XY2] JQRLJGH XXYY 基于Dijkstra和遗传算法的机器人路径规划 GreenSim团队专业级算法设计代写程序欢迎访问GreenSim团队主页→httpcomcngreensim 输入参数在函数体内部定义输出参数为 L1由Dijkstra算法得出的最短路径长度 XY1由Dijkstra算法得出的最短路径经过节点的坐标 L2由遗传算法得出的最短路径长度 XY2由遗传算法得出的最短路径经过节点的坐标程序输出的图片有 Fig1 环境地图包括边界障碍物障碍物顶点之间的连线Dijkstra的网络图结构 Fig2 由Dijkstra算法得到的最短路径 Fig3 由遗传算法得到的最短路径Fig4 遗传算法的收敛曲线迄今为止找到的最优解种群平均适应值画Fig1figure 1 PlotGraphtitle 地形图及网络拓扑结构 PDinfones 2626 for i 126 for j 126 if D ij 1 x1 XY i5 y1 XY i6 x2 XY j5 y2 XY j6 dist x1-x2 2 y1-y2 2 05 PD ij dist end endend 调用最短路算法求最短路s 1出发点t 26目标点[LR] ZuiDuanLu PDst L1 L end XY1 XY R56 绘制由最短路算法得到的最短路径figure 2 PlotGraphhold onfor i 1 length R -1 x1 XY1 i1 y1 XY1 i2 x2 XY1 i11 y2 XY1 i12 plot [x1x2][y1y2]k hold onendtitle 由Dijkstra算法得到的初始路径使用遗传算法进一步寻找最短路第一步变量初始化M 50进化代数设置N 20种群规模设置Pm 03变异概率设置LC1 zeros 1M LC2 zeros 1M Yp L1第二步随机产生初始种群X1 XY R1 Y1 XY R2 X2 XY R3 Y2 XY R4 for i 1N farm i rand 1aaa end 以下是进化迭代过程counter 0设置迭代计数器while counter M停止条件为达到最大迭代次数第三步交叉交叉采用双亲双子单点交叉 newfarm cell 12N 用于存储子代的细胞结构Ser randperm N 两两随机配对的配对表 A farm Ser 1 取出父代A B farm Ser 2 取出父代B P0 unidrnd aaa-1 随机选择交叉点 a [A 1P0 B P01 end ]产生子代a b [B 1P0 A P01 end ]产生子代b newfarm 2N-1 a加入子代种群 newfarm 2N b for i 1 N-1 A farm Ser i B farm Ser i1 newfarm 2i b end FARM [farmnewfarm]新旧种群合并第四步选择复制 SER randperm 2N FITNESS zeros 12N fitness zeros 1N for i 1 2N PP FARM i FITNESS i MinFun PPX1X2Y1Y2 调用目标函数 end for i 1N f1 FITNESS SER 2i-1 f2 FITNESS SER 2i if f1 f2 else farm i FARM SER 2i fitnessi FITNESS SER 2i end end 记录最佳个体和收敛曲线minfitness min fitness meanfitness mean fitness if minfitness Yp pos find fitness minfitness Xp farm pos 1 Yp minfitness end if counter 10 PPP [05Xp05] PPPP 1-PPP X PPPX1PPPPX2 Y PPPY1PPPPY2 XY2 [XY] figure 3 PlotGraph hold on for i 1 length R -1 x1 XY2 i1 y1 XY2 i2 x2 XY2 i11 y2 XY2 i12 plot [x1x2][y1y2]k hold on end title 遗传算法第10代hold on for i 1 length R -1 x1 XY1 i1 y1 XY1 i2 x2 XY1 i11 y2 XY1 i12 plot [x1x2][y1y2]kLineWidth1 hold on end end if counter 20 PPP [05Xp05] PPPP 1-PPP X PPPX1PPPPX2 Y PPPY1PPPPY2 XY2 [XY] figure 4 PlotGraph hold on for i 1 length R -1 x1 XY2 i1 y2 XY2 i12 plot [x1x2][y1y2]k hold on end title 遗传算法第20代 hold on for i 1 length R -1 x1 XY1 i1 y1 XY1 i2 x2 XY1 i11 y2 XY1 i12 plot [x1x2][y1y2]kLineWidth1 hold on end end if counter 30 PPP [05Xp05] PPPP 1-PPP X PPPX1PPPPX2 Y PPPY1PPPPY2 XY2 [XY] figure 5 PlotGraph hold on for i 1 length R -1 x1 XY2 i1 y1 XY2 i2 x2 XY2 i11 y2 XY2 i12 plot [x1x2][y1y2]k hold on end title 遗传算法第30代hold on for i 1 length R -1 x1 XY1 i1 y2 XY1 i12 plot [x1x2][y1y2]kLineWidth1 hold on end end if counter 40 PPP [05Xp05] PPPP 1-PPP X PPPX1PPPPX2 Y PPPY1PPPPY2 XY2 [XY] figure 6 PlotGraph hold on for i 1 length R -1 x1 XY2 i1 y1 XY2 i2x2 XY2 i11 y2 XY2 i12 plot [x1x2][y1y2]k hold on end title 遗传算法第40代 hold on for i 1 length R -1 x1 XY1 i1 y1 XY1 i2 x2 XY1 i11 y2 XY1 i12 plot [x1x2][y1y2]kLineWidth1 hold on end end if counter 50 PPP [05Xp05] PPPP 1-PPP X PPPX1PPPPX2 Y PPPY1PPPPY2 XY2 [XY] figure 7 PlotGraph hold on for i 1 length R -1 x1 XY2 i1 y1 XY2 i2 x2 XY2 i11 y2 XY2 i12 plot [x1x2][y1y2]k hold on end title 遗传算法第50代hold on for i 1 length R -1 x1 XY1 i1 y1 XY1 i2 x2 XY1 i11 y2 XY。
遗传算法的原理及MATLAB程序实现
遗传算法的原理及MATLAB程序实现1 遗传算法的原理1.1 遗传算法的基本思想遗传算法(genetic algorithms,GA)是一种基于自然选择和基因遗传学原理,借鉴了生物进化优胜劣汰的自然选择机理和生物界繁衍进化的基因重组、突变的遗传机制的全局自适应概率搜索算法。
遗传算法是从一组随机产生的初始解(种群)开始,这个种群由经过基因编码的一定数量的个体组成,每个个体实际上是染色体带有特征的实体。
染色体作为遗传物质的主要载体,其内部表现(即基因型)是某种基因组合,它决定了个体的外部表现。
因此,从一开始就需要实现从表现型到基因型的映射,即编码工作。
初始种群产生后,按照优胜劣汰的原理,逐代演化产生出越来越好的近似解。
在每一代,根据问题域中个体的适应度大小选择个体,并借助于自然遗传学的遗传算子进行组合交叉和变异,产生出代表新的解集的种群。
这个过程将导致种群像自然进化一样,后代种群比前代更加适应环境,末代种群中的最优个体经过解码,可以作为问题近似最优解。
计算开始时,将实际问题的变量进行编码形成染色体,随机产生一定数目的个体,即种群,并计算每个个体的适应度值,然后通过终止条件判断该初始解是否是最优解,若是则停止计算输出结果,若不是则通过遗传算子操作产生新的一代种群,回到计算群体中每个个体的适应度值的部分,然后转到终止条件判断。
这一过程循环执行,直到满足优化准则,最终产生问题的最优解。
图1-1给出了遗传算法的基本过程。
1.2 遗传算法的特点1.2.1 遗传算法的优点遗传算法具有十分强的鲁棒性,比起传统优化方法,遗传算法有如下优点:1. 遗传算法以控制变量的编码作为运算对象。
传统的优化算法往往直接利用控制变量的实际值的本身来进行优化运算,但遗传算法不是直接以控制变量的值,而是以控制变量的特定形式的编码为运算对象。
这种对控制变量的编码处理方式,可以模仿自然界中生物的遗传和进化等机理,也使得我们可以方便地处理各种变量和应用遗传操作算子。
用Matlab实现遗传算法

用GA找到函数最小值x = ga(fitnessfcn,nvars)局部无约束最小值,x是目标函数的适应度函数,nvars是适应度函数的尺寸(设计变量的数量)。
目标函数和适应度函数接受了1×N大小的x矢量,在x返回一个标量的计算值。
x = ga(fitnessfcn,nvars,A,b)在线性不等式约束下,适应度函数的局部最小值。
如果这个问题有m个线性不等式和n个变量,则A是m×n矩阵,b是m×1矩阵。
注意:当人口类型选项设置为“位串”或者“自定义”,线性约束不满足。
x = ga(fitnessfcn,nvars,A,b,Aeq,beq)存在线性等式约束下,适应度函数的局部最小值。
如果没有不等式存在,设置A=[] 和 b=[]。
如果问题存在r个线性等式约束和n个变量,那么Aeq 是r ×n矩阵的大小,beq是r大小的矢量。
注意:当人口类型选项设置为“位串”或者“自定义”,线性约束不满足。
x = ga(fitnessfcn,nvars,A,b,Aeq,beq,LB,UB)定义了一系列设计变量x的最小和最大边界。
以至于在范围内找到一个解。
如果没有边界存在,LB 和 UB设置为空矩阵。
如果x(i)无下界,设置LB(i) = -Inf;如果x(i)无上界,设置UB(i) = Inf。
x = ga(fitnessfcn,nvars,A,b,Aeq,beq,LB,UB,nonlcon)服从在非线性约束条件下的最小值,非线性函数接收x,返回C和Ceq向量,分别代表非线性的不等式和等式。
GA最小化适应度函数,在C(x)≤0和Ceq(x)=0的条件下。
如果无边界存在,设置 LB=[] 和 UB=[]。
注意:当人口类型选项设置为“位串”或者“自定义”,非线性约束不满足。
x = ga(fitnessfcn,nvars,A,b,Aeq,beq,LB,UB,nonlcon,options)用在结构选项中的值代替默认的优化参数来进行最小化,它也可以用gaoptimset函数来创建,具体参考gaoptimset的用法。
基于Matlab的遗传算法程序设计及优化问题求解
曲靖师范学院学生毕业论文(设计)题目:基于Matlab的遗传算法程序设计及优化问题求解院(系):数学与信息科学学院专业:信息与计算科学班级:20051121班学号:2005112104论文作者:沈秀娟指导教师:刘俊指导教师职称:教授2009年 5月基于Matlab的遗传算法程序设计及优化问题求解摘要遗传算法作为一种新的优化方法,广泛地用于计算科学、模式识别和智能故障诊断等方面,它适用于解决复杂的非线性和多维空间寻优问题,近年来也得到了较为广阔的应用. 本文介绍了遗传算法的发展、原理、特点、应用和改进方法,以及基本操作和求解步骤,再基于Matlab编写程序实现遗传算法并求解函数的优化问题. 程序设计过程表明,用Matlab语言进行优化计算,具有编程语句简单,用法灵活,编程效率高等优点. 经仿真验证,该算法是正确可行的.关键词:遗传算法;Matlab;优化Matlab-based genetic algorithm design and optimization of procedures forproblem solvingAbstract:As a new optimizated method,genetic algorithm is widely used in co mputational science,pattern recognition,intelligent fault diagnosisandsoon. It is suitable to solve complex non-linear and multi-dimensionaloptimizatio n problem.And it has been more widely used in recentyears.This paper descri bes the development of genetic algorithms,principle,features,application an d improvement of methods.At the same time,it in-troduces basic operation and solution steps.And then,it achievesgeneticalgorithm on the matlab programmi ng andsolves the function optimization problem.The program design process sh ows that this optimization calculation has advantages of simple programming language,flexible usage and high efficiency in Matlab language.The algorith m iscorrect and feasible by simulated authentication.Keywords: Genetic algorithm; Matlab;Optimization目录1 引言 (1)2 文献综述 (1)2.1国内外研究现状及评价 (1)2.2提出问题 (2)3 遗传算法的理论研究 (2)3.1遗传算法的产生背景 (2)3.2遗传算法的起源与发展 (3)3.2.1 遗传算法的起源 (3)3.2.2 遗传算法的发展 (3)3.3遗传算法的数学基础研究 (4)3.4遗传算法的组成要素 (6)3.5遗传算法的基本原理 (7)3.6遗传算法在实际应用时采取的一般步骤 (8)3.7遗传算法的基本流程描述 (9)3.8遗传算法的特点 (10)3.9遗传算法的改进 (11)3.10遗传算法的应用领域 (12)4 基于MATLAB的遗传算法实现 (14)5 遗传算法的函数优化的应用举例 (17)6 结论 (18)6.1主要发现 (18)6.2启示 (18)6.3局限性 (19)6.4努力的方向 (19)参考文献 (20)致谢 (21)附录 (22)1引言遗传算法(Genetic Algorithm)是模拟自然界生物进化机制的一种算法即遵循适者生存、优胜劣汰的法则也就是寻优过程中有用的保留无用的则去除. 在科学和生产实践中表现为在所有可能的解决方法中找出最符合该问题所要求的条件的解决方法即找出一个最优解. 这种算法是1960年由Holland提出来的其最初的目的是研究自然系统的自适应行为并设计具有自适应功能的软件系统. 它的特点是对参数进行编码运算不需要有关体系的任何先验知识沿多种路线进行平行搜索不会落入局部较优的陷阱,能在许多局部较优中找到全局最优点是一种全局最优化方法[1-3]. 近年来,遗传算法已经在国际上许多领域得到了应用. 该文将从遗传算法的理论和技术两方面概述目前的研究现状描述遗传算法的主要特点、基本原理以及改进算法,介绍遗传算法的应用领域,并用MATLAB 实现了遗传算法及最优解的求解.2文献综述2.1国内外研究现状及评价国内外有不少的专家和学者对遗传算法的进行研究与改进. 比如:1991年D.WHITEY 在他的论文中提出了基于领域交叉的交叉算子(ADJACENCY BASED CROSSOVER),这个算子是特别针对用序号表示基因的个体的交叉,并将其应用到了TSP问题中,通过实验对其进行了验证. 2002年,戴晓明等应用多种群遗传并行进化的思想,对不同种群基于不同的遗传策略,如变异概率,不同的变异算子等来搜索变量空间,并利用种群间迁移算子来进行遗传信息交流,以解决经典遗传算法的收敛到局部最优值问题. 国内外很多文献都对遗传算法进行了研究. 现查阅到的国内参考文献[1-19]中, 周勇、周明分别在文献[1]、[2]中介绍了遗传算法的基本原理;徐宗本在文献[3]中探讨了包括遗传算法在内的解全局优化问题的各类算法,文本次论文写作提出了明确的思路;张文修、王小平、张铃分别在文献[4]、[5]、[6]从遗传算法的理论和技术两方面概述目前的研究现状;李敏强、吉根林、玄光南分别在文献[7]、[8]、[9]中都不同程度的介绍了遗传算法的特点以及改进算法但未进行深入研究;马玉明、张丽萍、戴晓辉、柴天佑分别在文献[10]、[11]、[12]、[13]中探讨了遗传算法产生的背景、起源和发展;李敏强、徐小龙、林丹、张文修分别在文献[14]、[15]、[16]、[17]探讨了遗传算法的发展现状及以后的发展动向;李敏强,寇纪凇,林丹,李书全在文献[18]中主要论述了遗传算法的具体的实施步1骤、应用领域及特点;孙祥,徐流美在文献[19]中主要介绍了Matlab的编程语句及基本用法.所有的参考文献都从不同角度不同程度的介绍了遗传算法但都不够系统化不够详细和深入.2.2提出问题随着研究的深入,人们逐渐认识到在很多复杂情况下要想完全精确地求出其最优解既不可能,也不现实,因而求出近似最优解或满意解是人们的主要着眼点之一. 很多人构造出了各种各样的复杂形式的测试函数,有连续函数,有离散函数,有凸函数,也有凹函数,人们用这些几何特性各异的函数来评价遗传算法的性能. 而对于一些非线性、多模型、多目标的函数优化问题用其他优化方法较难求解遗传算法却可以方便地得到较好的结果. 鉴于遗传算法在函数优化方面的重要性,该文在参考文献[1-19]的基础上,用Matlab语言编写了遗传算法程序, 并通过了调试用一个实际例子来对问题进行了验证,这对在Matlab环境下用遗传算法来解决优化问题有一定的意义.3遗传算法的理论研究3.1遗传算法的产生背景科学研究、工程实际与国民经济发展中的众多问题可归结作“极大化效益、极小化代价”这类典型模型. 求解这类模型导致寻求某个目标函数(有解析表达式或无解析表达式)在特定区域上的最优解. 而为解决最优化问题目标函数和约束条件种类繁多,有的是线性的,有的是非线性的;有的是连续的,有的是离散的;有的是单峰值的,有的是多峰值的. 随着研究的深入,人们逐渐认识到:在很多复杂情况下要想完全精确地求出其最优解既不可能,也不现实,因而求出近似最优解或满意解是人们的主要着眼点之一. 总的来说,求最优解或近似最优解的方法有三种: 枚举法、启发式算法和搜索算法.(1)枚举法. 枚举出可行解集合内的所有可行解以求出精确最优解. 对于连续函数,该方法要求先对其进行离散化处理,这样就有可能产生离散误差而永远达不到最优解. 另外,当枚举空间比较大时该方法的求解效率比较低,有时甚至在目前最先进的计算工具上都无法求解.(2)启发式算法. 寻求一种能产生可行解的启发式规则以找到一个最优解或近似最优解. 该方法的求解效率虽然比较高,但对每一个需要求解的问题都必须找出其特有的2启发式规则,这个启发式规则无通用性不适合于其它问题.(3)搜索算法. 寻求一种搜索算法,该算法在可行解集合的一个子集内进行搜索操作以找到问题的最优解或近似最优解. 该方法虽然保证了一定能够得到问题的最优解,但若适当地利用一些启发知识就可在近似解的质量和求解效率上达到一种较好的平衡.随着问题种类的不同以及问题规模的扩大,要寻求一种能以有限的代价来解决上述最优化问题的通用方法仍是一个难题. 而遗传算法却为我们解决这类问题提供了一个有效的途径和通用框架开创了一种新的全局优化搜索算法.3.2遗传算法的起源与发展3.2.1 遗传算法的起源50年代末到60年代初,自然界生物进化的理论被广泛接受生物学家Fraser,试图通过计算的方法来模拟生物界“遗传与选择”的进化过程,这是遗传算法的最早雏形. 受一些生物学家用计算机对生物系统进行模拟的启发,Holland开始应用模拟遗传算子研究适应性. 在1967年,Bagley关于自适应下棋程序的论文中,他应用遗传算法搜索下棋游戏评价函数的参数集并首次提出了遗传算法这一术语. 1975年,Holland出版了遗传算法历史上的经典著作《自然和人工系统中的适应性》,首次明确提出遗传算法的概念. 该著作中系统阐述了遗传算法的基本理论和方法,并提出了模式(schemat atheorem)[4],证明在遗传算子选择、交叉和变异的作用下具有低阶、短定义距以及平均适应度高于群体平均适应度的模式在子代中将以指数级增长. Holand创建的遗传算法,是基于二进制表达的概率搜索方法. 在种群中通过信息交换重新组合新串;根据评价条件概率选择适应性好的串进入下一代;经过多代进化种群最后稳定在适应性好的串上. Holand最初提出的遗传算法被认为是简单遗传算法的基础,也称为标准遗传算法.3.2.2 遗传算法的发展(1)20世纪60年代,John Holland教授和他的数位博士受到生物模拟技术的启发,认识到自然遗传可以转化为人工遗传算法. 1962年,John Holland提出了利用群体进化模拟适应性系统的思想,引进了群体、适应值、选择、变异、交叉等基本概念.(2)1967年,J.D.Bagely在其博士论文中首次提出了“遗传算法”的概念.(3)1975年,Holland出版了《自然与人工系统中的适应性行为》(Adaptation in Natural and Artificial System).该书系统地阐述了遗传算法的基本理论和方法,提出了遗传算法的基本定理—模式定理,从而奠定了遗传算法的理论基础. 同年De Jong3在其博士论文中,首次把遗传算法应用于函数优化问题对遗传算法的机理与参数进行了较为系统地研究并建立了著名的五函数测试平台.(4)20世纪80年代初,Holland教授实现了第一个基于遗传算法的机器学习系统—分类器系统(Classifier System简称CS),开创了基于遗传算法的机器学习的新概念.(5)1989年,David Goldberg出版了《搜索、优化和机器学习中的遗传算法》(Genetic Algorithms in Search Optimization and Machine Learning).该书全面系统地总结了当时关于遗传算法的研究成果,结合大量的实例完整的论述了遗传算法的基本原理及应用,奠定了现代遗传算法的基础.(6)1992年,John R.Koza出版了专著《遗传编程》(Genetic Programming)提出了遗传编程的概念,并成功地把遗传编程的方法应用于人工智能、机器学习、符号处理等方面. 随着遗传算法的不断深入和发展,关于遗传算法的国际学术活动越来越多,遗传算法已成为一个多学科、多领域的重要研究方向.今天遗传算法的研究已经成为国际学术界跨学科的热门话题之一. 遗传算法是一种有广泛应用前景的算法,但是它的研究和应用在国内尚处于起步阶段. 近年来遗传算法已被成功地应用于工业、经济管理、交通运输、工业设计等不同领域解决了许多问题.例如可靠性优化、流水车间调度、作业车间调度、机器调度、设备布局设计、图像处理以及数据挖掘等.3.3 遗传算法的数学基础研究模式定理及隐含并行性原理被看作遗传算法的两大基石,后来又提出了建筑块假设,但是模式定理无法解释遗传算法实际操作中的许多现象,隐性并行性的论证存在严重漏洞,而建筑块假设却从未得到过证明. 对遗传算法的基础理论的研究主要分三个方面:模式定理的拓广和深入、遗传算法的新模型、遗传算法的收敛性理论.(1)模式定理的拓广和深入. Holland给出模式定理:具有短的定义长度、低阶、并且模式采样的平均适应值在种群平均适应值以上的模式在遗传迭代过程中将按指数增长率被采样模式定理可表达为:m(H,t+1)≥m(H,t).()fHf.()⎪⎭⎫⎝⎛---PHOlP mHc.1.1δ(1)其中m(Ht):在t代群体中存在模式H 的串的个数.4()Hf:在t 代群体中包含模式H 的串的平均适应值. f:t代群体中所有串的平均适应值.l表示串的长度pc 表示交换概率pm表示变异概率.Holland的模式定理奠定了遗传算法的数学基础根据隐性并行性得出每一代处理有效模式的下限值是()l c n2113.其中n是种群的大小c1是小整数. Bertoui和Dorigo进行了深入的研究获得当2βln=,β为任意值时处理多少有效模式的表达式. 上海交通大学的恽为民等获得每次至少产生()21-no数量级的结果. 模式定理中模式适应度难以计算和分析A.D.Berthke首次提出应用Walsh函数进行遗传算法的模式处理并引入模式变换的概念采用Walsh函数的离散形式有效地计算出模式的平均适应度并对遗传算法进行了有效的分析. 1972年Frantz首先发现一种常使GA从全局最优解发散出去的问题,称为GA-欺骗题[5]. Goldberg最早运用Walsh模式转换设计出最小的GA-欺骗问题并进行了详细分析.(2)遗传算法的新模型. 由于遗传算法中的模式定理和隐性并行性存在不足之处,为了搞清楚遗传算法的机理,近几年来人们建立了各种形式的新模型最为典型的是马氏链模型遗传算法的马氏链模型[6-7],主要由三种分别是种群马氏链模型、Vose模型和Cerf 扰动马氏链模型. 种群马氏链模型将遗传算法的种群迭代序列视为一个有限状态马氏链来加以研究,运用种群马氏链模型转移概率矩阵的某些一般性质分析遗传算法的极限行为,但转移概率的具体形式难以表达妨碍了对遗传算法的有限时间行为的研究;Vose 模型是在无限种群假设下利用相对频率导出,表示种群的概率的向量的迭代方程,通过这一迭代方程的研究,可以讨论种群概率的不动点及其稳定性,从而导致对遗传算法的极限行为的刻画,但对解释有限种群遗传算法的行为的能力相对差一些. Cerf扰动模型是法国学者Cerf将遗传算法看成一种特殊形式的广义模拟退火模型,利用了动力系统的随机扰动理论,对遗传算法的极限行为及收敛速度进行了研究. 还有其它改进模型,例如张铃、张钹等人提出的理想浓度模型,它首先引入浓度和家族的概念,通过浓度计算建立理想浓度模型[8-10],其浓度变化的规律为:5c(Hi,t +1)=c(H,t).()()()t ftOHfi,(2)c(Hi,t+1)表示模式Hi在t时刻的浓度,并对其进行分析,得出结论:遗传算法本质上是一个具有定向制导的随机搜索技术,其定向制导原则是导向适应度高的模式为祖先的染色体“家族”方向.(3)遗传算法的收敛性理论. 对于遗传算法的马氏链分析本身就是建立遗传算法的收敛性理论[11-12], Eiben等用马尔可夫链证明了保留最优个体的遗传算法的概率性全局收敛,Rudolph用齐次有限马尔可夫链证明了具有复制、交换、突变操作的标准遗传算法收敛不到全局最优解,不适合于静态函数的优化问题,建议改变复制策略以达到全局收敛,Back和Muhlenbein研究了达到全局最优解的算法的时间复杂性问题,近几年,徐宗本等人建立起鞅序列模型,利用鞅序列收敛定理证明了遗传算法的收敛性.3.4遗传算法的组成要素遗传算法所涉及的五大要素:参数编码、初始群体的设定、适应度函数的设计、遗传操作的设计和控制参数的设定,其具体内容如下:(1)参数编码. 遗传算法中常用的编码方法是二进制编码,它将问题空间的参数用字符集{0,1}构成染色体位串,符合最小字符集原则,操作简单,便于用模式定理分析.(2)适应度函数的设计. 适应度函数是评价个体适应环境的能力,使选择操作的依据,是由目标函数变换而成. 对适应度函数唯一的要求是其结果为非负值. 适应度的尺度变换是对目标函数值域的某种映射变换,可克服未成熟收敛和随机漫游现象. 常用的适应度函数尺度变化方法主要有线性变换、幂函数变换和指数变换.[13](3)遗传操作的设计. 包括选择、交叉、变异.①选择(Selection). 选择是用来确定交叉个体,以及被选个体将产生多少个子代个体. 其主要思想是个体的复制概率正比于其适应值,但按比例选择不一定能达到好的效果. 选择操作从早期的轮盘赌选择发展到现在最佳个体保存法、排序选择法、联赛选择法、随机遍历抽样法、局部选择法、柔性分段复制、稳态复制、最优串复制、最优串保留等.②交叉(Crossover). 交叉是指把两个父代个体的部分结构加以替换重组而生成新个体的操作,其作用是组合出新的个体,在串空间进行有效搜索,同时降低对有效模式的破坏概率. 各种交叉算子均包含两个基本内容:确定交叉点的位置和进行部分基因的6交换. 常用的交叉操作方法有单点交叉、双点交叉、一致交叉、均匀交叉、算术交叉、二维交叉、树结构交叉、部分匹配交叉、顺序交叉和周期交叉等等.③变异(Mutation). 变异是指将个体编码串中的某些基因值用其它基因值来替换,形成一个新的个体. 遗传算法中的变异运算是产生新个体的辅助方法,其目的是使遗传算法具有局部的随机搜索能力和保持群体的多样性. 变异算法包括确定变异点的位置和进行基因值替换. 常见的变异算子有基本位变异、均匀变异、高斯变异、二元变异、逆转变异、自适应变异等.(4) 控制参数设定. 遗传算法中需要确定一些参数取值,主要有串长l,群体大小n,交叉概率pc、变异概率pm等,对遗传算法性能影响很大. 目前对参数根据情况进行调整变化研究比较多,而一般确定的参数范围是:n=20~200,pc = 015 ~110,pm =0~0105.3.5遗传算法的基本原理在自然界,由于组成生物群体中各个体之间的差异,对所处环境有不同的适应和生存能力,遵照自然界生物进化的基本原则,适者生存、优胜劣汰,将要淘汰那些最差个体,通过交配将父本优秀的染色体和基因遗传给子代,通过染色体核基因的重新组合产生生命力更强的新的个体与由它们组成的新群体. 在特定的条件下,基因会发生突变,产生新基因和生命力更强的新个体;但突变是非遗传的,随着个体不断更新,群体不断朝着最优方向进化,遗传算法是真实模拟自然界生物进化机制进行寻优的. 在此算法中,被研究的体系的响应曲面看作为一个群体,相应曲面上的每一个点作为群体中的一个个体,个体用多维向量或矩阵来描述,组成矩阵和向量的参数相应于生物种组成染色体的基因,染色体用固定长度的二进制串表述,通过交换、突变等遗传操作,在参数的一定范围内进行随机搜索,不断改善数据结构,构造出不同的向量,相当于得到了被研究的不同的解,目标函数值较优的点被保留,目标函数值较差的点被淘汰.[14]由于遗传操作可以越过位垒,能跳出局部较优点,到达全局最优点.遗传算法是一种迭代算法,它在每一次迭代时都拥有一组解,这组解最初是随机生成的,在每次迭代时又有一组新的解由模拟进化和继承的遗传操作生成,每个解都有一目标函数给与评判,一次迭代成为一代. 经典的遗传算法结构图如下:图1 遗传算法的结构图3.6遗传算法在实际应用时采取的一般步骤(1)根据求解精度的要求,确定使用二进制的长度. 设值域的取值范围为[a i ,b i ],若要求精确到小数点后6位,则由(b i -a i )×106<2m i -1求得m i 的最小长度,进而可求出位于区间的任一数:x i =a i +decimal(1001...0012)×12--m i a b i i [15] (3)其中,i=1,2, ..., Popsize ;Popsize 为种群中染色体的个数;(2)利用随机数发生器产生种群;(3)对种群中每一染色体v i ,计算其对应适应度eval(v i ),i=1,2,… ,Popsize ;(4)计算种群适应度之和F :F=()v eval iPopsizei ∑=1(4) (5)计算每个染色体选择概率Pi :()F v eval p i i =(5) i=1,2, ... ,Popsize ;(6)计算每个染色体的累加概率qi:q i =∑=ijjp1(6)i=1, 2, ...,Popsize ;(7)产生一个位于[0,1]区间的随机数序列,其长度为N,如果其中任意一数r<q1,则选择第一个染色体,若qi1-<r<qi,则选择第i个染色体,i=1,2, ... Popsize,这样可以获得新一代种群;(8)对新一代种群进行交叉运算:设交叉概率为pc,首先产生一个位于区间[0,1]内的随机数序列,其长度为N,如果其中任意一数r<pc,则对应染色体被选中(如果选中奇数个,则可以去掉一个),然后在[1,m-1]区间中产生随机数,个数为选中的染色体数的一半,然后根据随机数在对应位置进行交换操作,从而构成新的染色体;(9)变异操作:设变异概率为pm,产生m×N个位于区间[0,1]上的随机数.如果某一随机数r<pm,则选中对应位变异,构成新的种群;(10)第一代计算完毕,返回③继续计算,直到达到满意的结果为止.3.7遗传算法的基本流程描述随机初始化种群p(0)={x1,x2,...,xn};t=0;计算p(0)中个体的适应值;while(不满足终止条件){ 根据个体的适应值及选择策略从p(t)中选择下一代生成的父体p(t);执行交叉,变异和再生成新的种群p(t+1) ;计算p(t+1)中个体的适应值;t=t+1;}伪代码为:BEGIN:I=0;Initialize P(I);Fitness P(I);While (not Terminate2Condition){I++;GA2Operation P(I);Fitness P(I);}END.3.8遗传算法的特点遗传算法不同于传统的搜索和优化方法. 主要区别在于:(1)自组织、自适应和自学习性(智能性). 应用遗传算法求解问题时,在编码方案、适应度函数及遗传算子确定后,算法将利用进化过程中获得的信息自行组织搜索. 由于基于自然的选择策略“适者生存、不适者被淘汰”,因而适应度大的个体具有较高的生存概率. 通常适应度大的个体具有更适应环境的基因结构,再通过基因重组和基因突变等遗传操作,就可能产生更适应环境的后代. 进化算法的这种自组织、自适应特征,使它同时具有能根据环境变化来自动发现环境的特性和规律的能力. 自然选择消除了算法设计过程中的一个最大障碍,即需要事先描述问题的全部特点,并要说明针对问题的不同特点算法应采取的措施.因此,利用遗传算法,我们可以解决那些复杂的非结构化问题.(2)遗传算法的本质并行性. 遗传算法按并行方式搜索一个种群数目的点,而不是单点. 它的并行性表现在两个方面,一是遗传算法是内在并行的( inherent paralleli sm),即遗传算法本身非常适合大规模并行. 最简单的并行方式是让几百甚至数千台计算机各自进行独立种群的演化计算,运行过程中甚至不进行任何通信(独立的种群之间若有少量的通信一般会带来更好的结果),等到运算结束时才通信比较,选取最佳个体.这种并行处理方式对并行系统结构没有什么限制和要求,可以说,遗传算法适合在目前所有的并行机或分布式系统上进行并行处理,而且对并行效率没有太大影响. 二是遗传算法的内含并行性. 由于遗传算法采用种群的方式组织搜索,因而可同时搜索解空间内的多个区域,并相互交流信息. 使用这种搜索方式,虽然每次只执行与种群规模N成比例的计算,但实质上已进行了大约O(N3)次有效搜索,这就使遗传算法能以较少的计算。
遗传算法解决TSP问题的matlab程序【精品毕业设计】(完整版)

1.遗传算法解决TSP 问题(附matlab源程序)2.知n个城市之间的相互距离,现有一个推销员必须遍访这n个城市,并且每个城市3.只能访问一次,最后又必须返回出发城市。
如何安排他对这些城市的访问次序,可使其4.旅行路线的总长度最短?5.用图论的术语来说,假设有一个图g=(v,e),其中v是顶点集,e是边集,设d=(dij)6.是由顶点i和顶点j之间的距离所组成的距离矩阵,旅行商问题就是求出一条通过所有顶7.点且每个顶点只通过一次的具有最短距离的回路。
8.这个问题可分为对称旅行商问题(dij=dji,,任意i,j=1,2,3,…,n)和非对称旅行商9.问题(dij≠dji,,任意i,j=1,2,3,…,n)。
10.若对于城市v={v1,v2,v3,…,vn}的一个访问顺序为t=(t1,t2,t3,…,ti,…,tn),其中11.ti∈v(i=1,2,3,…,n),且记tn+1= t1,则旅行商问题的数学模型为:12.min l=σd(t(i),t(i+1)) (i=1,…,n)13.旅行商问题是一个典型的组合优化问题,并且是一个np难问题,其可能的路径数目14.与城市数目n是成指数型增长的,所以一般很难精确地求出其最优解,本文采用遗传算法15.求其近似解。
16.遗传算法:17.初始化过程:用v1,v2,v3,…,vn代表所选n个城市。
定义整数pop-size作为染色体的个数18.,并且随机产生pop-size个初始染色体,每个染色体为1到18的整数组成的随机序列。
19.适应度f的计算:对种群中的每个染色体vi,计算其适应度,f=σd(t(i),t(i+1)).20.评价函数eval(vi):用来对种群中的每个染色体vi设定一个概率,以使该染色体被选中21.的可能性与其种群中其它染色体的适应性成比例,既通过轮盘赌,适应性强的染色体被22.选择产生后台的机会要大,设alpha∈(0,1),本文定义基于序的评价函数为eval(vi)=al23.pha*(1-alpha).^(i-1) 。
遗传算法优化的matlab案例

遗传算法(Genetic Algorithm,GA)是一种模拟生物进化过程的搜索和优化算法,通过模拟生物的遗传、交叉和变异操作来寻找问题的最优解。
它以一种迭代的方式生成和改进解决方案,并通过评估每个解决方案的适应度来选择下一代解决方案。
在Matlab中,遗传算法优化工具箱提供了方便的函数和工具,可以帮助用户快速开发和实现遗传算法优化问题。
下面,我们以一个简单的最优化问题为例,演示在Matlab中如何使用遗传算法优化工具箱进行优化。
假设我们要优化一个简单的函数f(x),其中x是一个实数。
我们的目标是找到使得f(x)取得最小值的x值。
具体来说,我们将优化以下函数: f(x) = x² - 4x + 4首先,我们在Matlab中定义目标函数f(x)的句柄(用于计算函数值)和约束条件(如果有的话)。
代码如下:function y = testfunction(x)y = x^2 - 4*x + 4;end接下来,我们需要使用遗传算法优化工具箱的函数ga来进行优化。
我们需要指定目标函数的句柄、变量的取值范围和约束条件(如果有的话),以及其他一些可选参数。
以下是一个示例代码:options = gaoptimset('Display', 'iter'); % 设置显示迭代过程lb = -10; % 变量下界ub = 10; % 变量上界[x, fval] = ga(@testfunction, 1, [], [], [], [], lb, ub, [], options);在上面的代码中,gaoptimset函数用于设置遗传算法的参数。
在这里,我们使用了可选参数'Display',它的值设置为'iter',表示显示迭代过程。
变量lb和ub分别指定了变量的取值范围,我们在这里将其设置为-10到10之间的任意实数。
横线[]表示没有约束条件。
基于遗传算法优化的多目标路径规划研究

基于遗传算法优化的多目标路径规划研究多目标路径规划是一项重要的任务。
它在无人机、机器人、自动驾驶汽车等领域中应用广泛。
优化多目标路径规划问题需要考虑多个目标,例如行驶距离、时间、能耗等。
由于多目标问题非常复杂,无法通过传统方法解决,因此遗传算法优化成为解决多目标路径规划问题的有效方法。
遗传算法是一种模拟自然进化过程中基因变异和选择的计算机算法。
其基本思想是通过对“个体”(路径规划问题的可能解)进行基因操作(交叉、变异),从而产生更适应环境的个体。
在每一轮迭代中,通过选择操作去掉适应性较差的个体,并让适应性较高的个体产生更多后代,以达到逐步优化个体适应性的目的。
遗传算法通常用于解决优化问题的产生,例如多目标路径规划。
遗传算法优化的多目标路径规划问题通常包括以下步骤:1. 确定适应性函数适应性函数用于评估个体(路径规划问题的可能解)对于多目标的适应性程度。
它通常被定义为多个目标函数的线性组合。
例如,一个适应性函数可以被定义为:f(x) = w1 * f1(x) + w2 * f2(x) + w3 * f3(x)其中,f1(x)、f2(x)、f3(x)分别表示路径的行驶距离、时间和能耗。
w1、w2、w3是不同目标函数的权重。
适应性函数的设计在遗传算法优化中非常重要,它决定了个体的适应性如何被计算。
2. 确定遗传算法的参数遗传算法涉及到一系列的参数,例如选择算子、变异算子、种群大小等。
这些参数对算法的性能有重要影响。
确定适当的遗传算法参数是优化多目标路径规划问题的关键。
通常,这些参数需要通过实验来确定。
3. 运行遗传算法一旦确定了适应性函数和遗传算法参数,就可以开始运行遗传算法。
在每一轮迭代中,通过交叉和变异操作生成新的个体,然后通过选择操作筛选出适应性最高的个体。
不断迭代,直到达到预定的终止条件,例如最大迭代次数或目标函数收敛。
4. 分析结果运行遗传算法后,可以得到一系列个体,每个个体都代表一个可能的路径规划解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于遗传算法的路径规划MATLAB实现主程序:clear all;close all;t=23; %过程点个数=t-1s=500; %种群规模pc=0.90; %交叉概率pm=0.20; %变异概率pop=zeros(s,t);for i=1:spop(i,1:t-1)=randperm(t-1);endfor k=1:1:2000 %进化代次数kif mod(k,10)==1kendpop=lujingdis(pop);c=15;%选择淘汰个数pop=lujingselect(pop,c);p=rand;if p>=pcpop=lujingcross(pop);endif p>=pmpop=lujingmutate(pop);Endendpopmin(pop(:,t))J=pop(:,t);fi=1./J;[Oderfi,Indexfi]=sort(fi); %安排fi从小到大BestS=pop(Indexfi(s),:); %使BestS=E(m),m即是属于max(fi)的Indexfi I=BestS;x=[2 3 6 10 14 17 22 20 23 25 30 28 25 21 29 16 18 15 9 11 6 5 ];y=[5 26 14 29 27 24 28 22 26 30 30 17 13 15 4 13 3 1 6 2 2 7];%过程点坐标% x=[1 2 3 4 6 9 11 10 8 9 6 4]; %12个过程点的坐标% y=[1 2 3 4 8 10 11 9 5 2 1 2];for i=1:1:t-1x1(i)=x(I(i));y1(i)=y(I(i));endx(t)=x(I(1));y(t)=y(I(1));a = [1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 0 1 1 1 1 0 1 1 1 1 1 1 11 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 0 0 0 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 10 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 11 1 1 1 1 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 11 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 01 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 01 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 01 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 01 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 11 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 11 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 10 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1];%31*31栅格%a = [1 1 1 1 1 1 1 1 1 11 1 1 0 0 1 1 1 0 01 0 1 0 0 1 1 1 1 10 0 1 1 1 1 0 1 1 01 1 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 11 0 0 1 1 0 1 1 1 11 1 1 1 1 1 1 1 1 01 1 1 1 1 1 1 1 1 10 1 1 1 1 1 0 0 1 1];%11*11栅格b = a;b(end+1,end+1) = 0;colormap([0 0 0;1 1 1]),pcolor(b)axis image xy;%绘制栅格图hold on;figure(1);plot(x,y,'-or');适应度函数程序:lujingdis.mfunction [pop]=qiujuli(pop)[s,t]=size(pop);for i=1:1:sdd=0;for j=1:1:t-2dd=dd+lujingcalculate(pop(i,j),pop(i,j+1));endpop(i,t)=dd;End距离计算程序:lujingcalculate.mfunction [d]=juli(m,n)x=[2 3 6 10 14 17 22 20 23 25 30 28 25 21 29 16 18 15 9 11 6 5 ]; y=[5 26 14 29 27 24 28 22 26 30 30 17 13 15 4 13 3 1 6 2 2 7]; %x=[1 2 3 4 6 9 11 10 8 9 6 4];% y=[1 2 3 4 8 10 11 9 5 2 1 2];d=sqrt((x(m)-x(n))^2+(y(m)-y(n))^2);选择算子程序:lujingselect.mfunction [pop]=select(pop,k)[s,t]=size(pop);m11=(pop(:,t));m11=m11';mmax=zeros(1,k);mmin=zeros(1,k);num=1;while num<k+1[a,mmax(num)]=max(m11);m11(mmax(num))=a;num=num+1;endnum=1;while num<k+1[b,mmin(num)]=min(m11);m11(mmin(num))=a;num=num+1;endfor i=1:kpop(mmax(i),:)=pop(mmin(i),:);End交叉算子程序:lujingcross.mfunction [pop]=cross(pop)[s,t]=size(pop);pop1=pop;for i=1:2:sm=randperm(t-3)+1;crosspoint(1)=min(m(1),m(2));crosspoint(2)=max(m(1),m(2));for j=1:crosspoint(1)while find(pop(i,crosspoint(1)+1:crosspoint(2))==pop(i,j)) zhi=find(pop(i,crosspoint(1)+1:crosspoint(2))==pop(i,j));y=pop(i+1,crosspoint(1)+zhi);pop(i,j)=y;endendfor j=crosspoint(2)+1:t-1while find(pop(i,crosspoint(1)+1:crosspoint(2))==pop(i,j)) zhi=find(pop(i,crosspoint(1)+1:crosspoint(2))==pop(i,j));y=pop(i+1,crosspoint(1)+zhi);pop(i,j)=y;endendend[pop]=lujingdis(pop);for i=1:sif pop1(i,t)<pop(i,t)pop(i,:)=pop1(i,:);endEnd变异算子程序:lujingmutate.mfunction [pop] = mutate(pop)[s,t]=size(pop);pop1=pop;for i=1:2:sm=randperm(t-3)+1;。