Trimble RTX-PP静态解算结果分析
TGO静态解算操作流程

TGO静态解算操作流程1、新建项目在左侧项目栏中,点击新建项目快捷方式.在显示的对话框中输入项目名,并选择模板.确认后将自动弹出项目属性对话框,可对项目属性进行编辑.2、导入数据从项目栏选择导入,显示的对话框列出了可导入的文件格式和仪器类别.此次操作中导入GPS数据文件.dat.输入点信息:在数据导入检查对话框中,选定使用复选框,名称中输入测站的名称,如果需要高程则要在天线高中输入天线高度,天线类型选Micro-centered L1/L2,测量要选槽口底部.确认后,如果没有选定坐标系统,软件自动弹出缺省投影定义对话框点击确认即可.若选择了坐标系统,将不出现该对话框.点标记:完成数据的导入后,系统将观测情况用图形方式显示出来.在视图中的点标记中选择名称,可在图中显示点的名称.3、基线解算选择基线:点击选择中的全部,或用鼠标器将全部基线画框选中,即选中所有的基线进行基线解算.处理形式设定:如果需要,在测量中选定GPS处理形式可设定进行GPS基线处理时的一些控制参数.主要是设置卫星高度角限制、星历类型、解算类型.点击高级的按钮,编辑质量验收标准、对流层天顶延迟等.处理基线:在测量中选择处理GPS基线.处理完毕可以看到基线长度,解算类型固定才可,否则要重新处理星历,比率,参考变量,均方根等因子.“使用”复选框选定,说明根据验收标准基线处理结果为“通过”或“标记”;若复选框为空,则处理结果为“失败”.按下保存,仅将选定了“使用”的解保存到项目中.查看报告:在报告中点击GPS基线处理报告,查看基线处理报告.通过基线报告分析,记录有关残差较大的卫星和时段,点击视图中的timeline,可对卫星和时段进行取舍.从报告工具条下查看GPS环闭合差报告,可以获得有关闭合环的闭合差信息.同时在设置里可以设置要显示的项目.4、无约束平差基准选择:在平差菜单下选基准/ WGS-84坐标系.平差形式选择:在平差菜单下可选平差形式进行平差形式的设定,一般选择95%的置信界限.执行平差:点击平差.查看报告:在报告中看网平差报告,如果通过则继续进行约束平差,失败则要进行加权平差.加权平差:在平差中选加权策略设定观测值的加权策略.将纯量类型改为“交替的”.再次进行平差,查看报告,直到通过为止.保存校正坐标:选择平差菜单下的校正坐标,保存,可将点在WGS-84基准下的坐标储存下来.在没有其他测量数据的情况下,这些坐标只用于决定点的位置,保存它们仅是为了校正.5、GPS点校正完成GPS网的无约束平差后,如果各项质量指标达到要求,即可开始进行GPS网的约束平差.龙泉山GPS控制网采用地方独立坐标系,已知点资料所属坐标系的椭球参数以及投影中央子午线未知,因此采用点校正的方法.点校正:选择测量菜单下的GPS点校正.出现GPS点校正对话框,选择校正组成.三参数转换法是计算从WGS-84椭球的中心到地方投影椭球的中心沿X、Y、Z轴的平移量,一般用于小范围的基准转换80km x 80km.在此默认三参数.本次只进行二维处理,所以不进行“垂直平差”,选择“更新缺省投影起点”和“水平平差”.不选“设置比例尺为”,通常不将比例因子设为1,以检查计算的比例因子是否接近于1.点列表:点击点列表.在弹出的点列表对话框中,用鼠标选择GPS点,输入点名,网格点中输入当地坐标.确认后回到界面.点击计算,计算GPS校正参数.点击点另存为,取名称.此时就可以得到WGS84和地方独立坐标系统的参数关系.单击报告,浏览校正计算的详细报告.此报告显示计算的所有参数及当前计算的控制点坐标与其已知位置和各残差值的比较.最后点击确认退出.查看报告:选择报告菜单下的附加报告,选择“点”然后确认.就可以看到计算后的各点坐标.第五章数据处理GPS测量的外业实施GPS点位选埋1、选点GPS外业测量选点时,测站点之间不要求一定通视,图形结构也比较灵活,因此,点位选择比较方便.但考虑GPS测量的特殊性,并顾及后续测量,选点时应着重考虑:1每点最好与某一点通视,以便后续测量工作的使用.2点周围高度角15°以上不要有障碍物,以免信号被遮挡或吸收.测站上应便于安置GPS接收机和天线,可方便地进行观测.3点位要远离大功率无线电发射源、高压电线等,以免电磁场对信号的干扰.4点位应选在视野开阔、交通方便、有利扩展、易于保存的地方,以便观测和日后使用.2、标志埋设GPS网点一般应埋设具有中心标志的标石,以精确标志点位,点的标石和标志必须稳定、坚固以利长久保存和利用.在基岩露头地区,也可直接在基岩上嵌入金属标志.资料有:①点之记;② GPS网的选点网图;③土地占用批准文件与测量标志委托保管书;④选点与埋石工作技术总结.外业观测目前接收机的自动化程度较高,操作人员只需作好以下工作即可:1各测站的观测员应按计划规定的时间作业,确保同步观测.2确保接收机存储器有足够存储空间.3开始观测后,正确输入高度角,天线高及天线高量取方式.4观测过程中应注意查看测站信息、接收到的卫星数量、卫星号、各通道信噪比、相位测量残差、实时定位的结果及其变化和存储介质记录等情况. 5同一观测时段中,接收机不得关闭或重启;将每测段信息如实记录在GPS 测量手簿上.6进行长距离高等级GPS测量时,要将气象元素,空气湿度等如实记录,每隔一小时或两小时记录一次.GPS基线处理GPS基线处理分析TGO进行基线处理后,龙泉山控制网的网形图如下:图5-1 龙泉山GPS控制网点击每条基线,可以查看基线解算报告,主要查看内容:1 基线解算质量的三个恒量标准,即基线的比率、参考方差、RMS等是否超过设置标准.2卫星的连续动态跟踪:良好的观测情况应该是连续跟踪和观测,而不应经常中断.3残差图:残差绝对值大小应该在载波相位波长的1/10之内.如果系统发现处理结果中存在异常,将显示提示信息.出现的重新计算报告,信息仅供参考,不能作为判断基线是否合格的依据.GPS基线处理报告见表5-1:表5-1 基线处理报告从上表可以看出,各基线比率均大于标记值3,达到“通过”状态;各基线参考变量小于标记值10,达到“通过”状态.各基线RMS均小于标记值,达到“通过”状态.查看各基线的卫星相位跟踪总结和残差图,没有残差过大的卫星和时段.因此各项指标均符合要求.GPS环闭合差报告GPS环闭合差报告见表5-2:表5-2 GPS环闭合差报告从报告的这一部分可以看出,各项均符合有关规定.无约束平差查看网平差报告,在平差报告的“平差后的观测值”部分,给出了基线向量观测值的残差和精度,根据这些数值,可以判断基线向量观测值质量的优劣.查看平差报告中有关基线向量精度的部分,确定未超出规范的相应要求.在平差报告的“协方差项”这一部分,给出了基线向量观测值的精度,其中的距离中误差和相对距离中误差是判定网是否达到规范中对相应等级网的要求的指标.表5-3 无约束平差协方差项根据上表,可以看出各项指标均符合规范要求.其中最弱边的相对中误差是1:29837.GPS点校正固定不同两点对精度的影响为了研究固定不同的两个点对精度的影响,下面按其分布分为三类,代表性的选其中两个点进行分析.1 固定点均匀分布的数据处理结果固定I26、I28两点,经过GPS校正后的点坐标和已知坐标间的残差差异:表5-4 检核点平差值与已知值比较表按中误差的计算公式计算得到:m=2 固定点分布于一侧的数据处理结果固定I26、I32两点,经过GPS校正后的点坐标和已知坐标间的残差差异:表5-5 检核点平差值与已知值比较表按中误差的计算公式计算得到:3 固定点分布于中间的数据处理结果固定I36、I32两点,经过GPS校正后的点坐标和已知坐标间的残差差异:表5-6 检核点平差值与已知值比较表按中误差的计算公式计算得到:由以上三种固定不同分布的两点得出的中误差大小,可以看出,固定均匀分布的两点I26、I28后得出的中误差最小,精度最高;固定一侧分布的两点I26、I32后得出的中误差最大,精度最低.由此可得出如下结论:进行约束平差时,控制点均匀分布所得到的成果精度最高.固定点的个数对精度的影响均匀分布.由于龙泉山控制网较小,测点数量有限,在研究固定点的个数对精度的影响时,只代表性的选择分别固定2个点、3个点、4个点时对网精度的影响.由上面结论得知固定均匀分布的两点进行GPS网约束平差的精度最高,所以所选点均为均匀分布,以减少分布差异造成的误差.1 固定两个点进行约束平差的数据处理结果在中已经分析并得出固定均匀分布的两点I26、I28的中误差,在此直接应用其结果,不再计算.2 固定三个点进行约束平差的数据处理结果固定I26、I36、I28三点,经过GPS校正后的点坐标和已知坐标间的残差差异:表5-7 检核点平差值与已知值比较表按中误差的计算公式计算得到:在固定三个点的约束平差中,由于这三个点的坐标有一定的误差,会出现固定点坐标平差前后发生变化,但相差不大,对整个网的精度影响不大,可以忽略.3 固定四个点进行约束平差的数据处理结果固定I26、I36、I28、I32四点,经过GPS校正后的点坐标和已知坐标间的残差差异:表5-8 检核点平差值与已知值比较表按中误差的计算公式计算得到:在固定四个点的约束平差中,由于这四个点的坐标有一定的误差,会出现固定点坐标平差前后发生变化,但相差不大,对整个网的精度影响不大,可以忽略.由以上三种固定不同分布的两点得出的中误差大小,可以看出,固定三个点I26、I36、I28后得出的中误差最小,精度最高;固定两个点I26、I28后得出的中误差最大,精度最低.从而得出结论,固定均匀分布的三个点时龙泉山GPS控制网的精度较高.第六章结论1、TGO软件功能强大、使用方便、自动化程度高、结果可靠.但是在数据检核部分只按水平分量和垂直分量W 与W 合在一起进行环闭合差的检验,平差计算后输出网的信息与现行规范要求也不一致,这使大多用户很难掌握其精度指标.2、对龙泉山GPS网进行二维约束平差,分别研究固定不同分布的两点和固定点的个数对精度的影响,得出结论:固定相同个数的点时,选择均匀分布的点时GPS网精度较高;相同的分布状况下,固定均匀分布的三个点时GPS 网的精度较高.3、在研究固定点个数对GPS网精度的影响时,固定三个点和固定四个点时的中误差非常相近,可能是由于本次龙泉山GPS控制网测点数量有限,从而在一定程度上影响了固定点个数对网精度影响的分析结果.参考文献1 刘小春. GPS 技术简介及其在工程测量中的应用举例. 高校理科研2 徐绍铨, 张海. GPS测量原理及应用M .武汉: 武汉测绘科技大学出版社. 19983 马耀昌, 辛国. GPS测量误差与数据处理的质量控制. 地理空间信息. 第2 期4 黄劲松. GPS测量与数据处理M .武汉: 武汉大学出版社, 20035 李征行,黄劲松. GPS测量与数据处理. 武汉:武汉大学出版社.6 吴俐明. GPS网数据的质量控制J .测绘通报, 2000 9 : 18~207 张述清. 全球定位系统的数据处理系统——TGO功能扩展应用. 测绘通报. 2006. 第10期8 魏二虎,黄劲松. GPS测量操作与数据处理. 武汉:武汉大学出版社.9 李全信. TGO软件中环闭合差的检核问题. 工程勘察. 2006. 第7期10 王文彬.新疆东天山地区C级GPS网的布设和精度分析. 地矿测绘. 2006. 第2 期11 陈中新, 奚长元. 吴江市D级地籍GPS控制网的数据处理与分析. 苏州科技学院学报自然科学版. 第2 期。
【天宝GPS5800培训资料】TGO静态解算
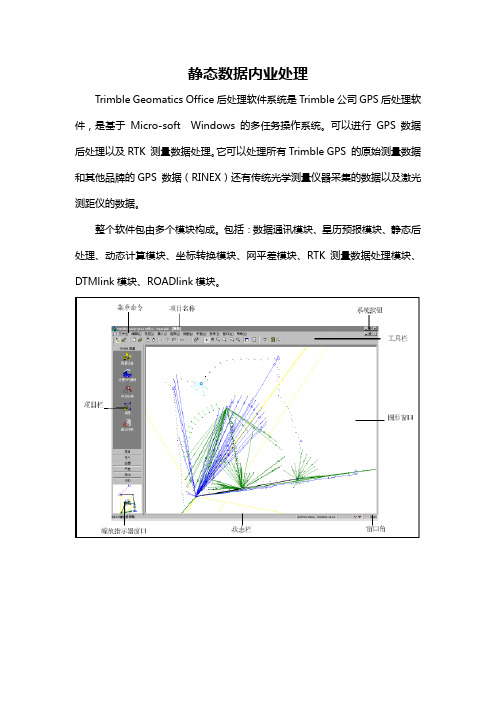
静态数据内业处理Trimble Geomatics Office后处理软件系统是Trimble公司GPS后处理软件,是基于Micro-soft Windows 的多任务操作系统。
可以进行GPS 数据后处理以及RTK 测量数据处理。
它可以处理所有Trimble GPS 的原始测量数据和其他品牌的GPS 数据(RINEX)还有传统光学测量仪器采集的数据以及激光测距仪的数据。
整个软件包由多个模块构成。
包括:数据通讯模块、星历预报模块、静态后处理、动态计算模块、坐标转换模块、网平差模块、RTK 测量数据处理模块、DTMlink模块、ROADlink模块。
TGO静态数据处理流程↓↓↓↓↓↓,把残差大的卫星删掉或补测通过不通过通过↓↓第一节:数据传输Trimble数据传输Data Transfer软件全中文操作,是Trimble所有产品共用的通讯软件,包括GPS接收机、手簿控制器、全站仪、电子水准仪、以及GIS数据采集器。
1.各按钮说明,点击此按钮时,PC机开始与所选设备硬件连接。
,点击此按钮时,PC机断开与所选设备的连接。
,表示建立连接后,外部所选设备数据传输至计算机内。
,表示建立连接后,计算机内部数据传输至所选设备内。
2.连接设备(以GPS5700为例)使用串口连接使用USB连接3.各设备名称对应表在设备选项中提供Trimble所有硬件产品的名称,建立设备与计算机连接时,应该选择相对应的设备名称;否则不能建立与计算机的连接。
注:5700控制器TSCe和5800控制器/ACU通过USB建立连接前,应该先使用微软的ActiveSync同步软件建立桌面连接。
4.添加要传输的数据文件建立连接后,点击添加其中5700—022*******是仪器主内存的名称,打开此文件后,静态观测数据显示出来,可点击细节按钮查看具体内容。
目标:是数据传输至计算机后,数据存放的地址,可通过浏览进行设置。
5.数据传输选中要传输的数据后,点击全部传送6.自添加设备名称点击,添加所需的设备名称。
TGO数据处理(静态)
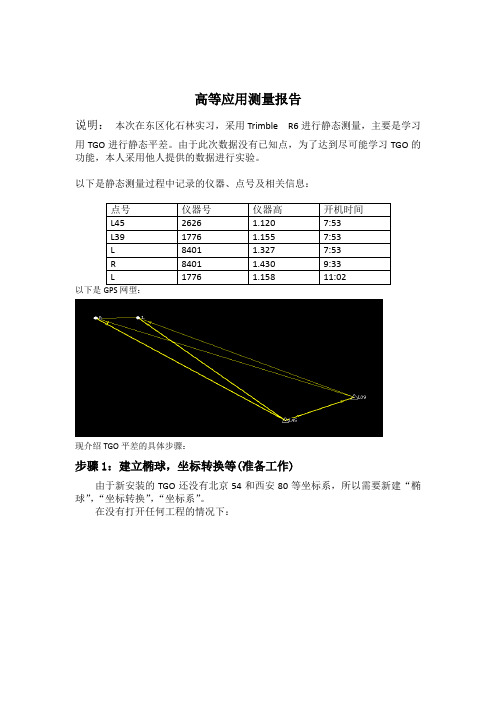
高等应用测量报告说明:本次在东区化石林实习,采用Trimble R6进行静态测量,主要是学习用TGO进行静态平差。
由于此次数据没有已知点,为了达到尽可能学习TGO的功能,本人采用他人提供的数据进行实验。
以下是静态测量过程中记录的仪器、点号及相关信息:以下是现介绍TGO平差的具体步骤:步骤1:建立椭球,坐标转换等(准备工作)由于新安装的TGO还没有北京54和西安80等坐标系,所以需要新建“椭球”,“坐标转换”,“坐标系”。
在没有打开任何工程的情况下:A. 首先新建椭球,在空白处点击右键,然后“添加新椭球”:只输入名称,长半轴和扁率的分母,短半轴和偏心率会自动算出。
添加成功之后,如图:B. 点“坐标转换”,在左边的空白处点右键,然后选择Molodensky:出来新界面后,选择“从-WGS84”,如图:完成后会在“坐标转换”出现下面的界面:C. 添加坐标系统。
选中左边的”Beijing54”坐标系统组,然后在右边栏的空白出点右键:这时要注意选择刚才新建的“坐标转换”Beijing54后,基准方法会自动出现Molodensky,如下图:点“下一步”后出现下面的界面:点“下一步”后出现设置中央子午线的界面,如果想设置1114度30分30秒等,先设置成114,以后可以再编辑修改,如图:“下一步”:现在可以重新修改中央子午线了:在TGO主界面下,新建项目:新建项目工程之后自动弹出项目属性:如下只修改上面的“坐标系统设置”中的“改变”按钮,下面的“当地点设置”不用改变:点击“完成”之后:步骤3:导入*.dat数据导入完成后会提示检查天线高等(此处的名称最好改为点名,输入相应点的仪器高):在使用工具条下选择需要的数据,名称中根据文件名输入测站的名称,如果需要高程则要在天线高中输入天线高度。
测量要选天线相位中心或基座底部。
确定后,如果没有选定坐标系统,软件自动弹出缺省投影定义对话框点击确认即可。
若选择了坐标系统,将不出现该对话框。
第二讲 零件的静态分析_2
面1
面2
习题1:带孔矩形板的静态分析3
使用两个中面对称和一条边线“参考几何体”约束。
边线
面1
面2
定义“设计检查”
根据选定的“失效准则”,计算每个“节”的安全系数。
安全系数大,表示可以节省该区域的材料。 常要求最小安全系数在1.5~3。
习题2: L形支架的静态分析(P50)
习题2: L形支架的静态分析(P50)
习题2 (fillet)
使用网格自动过渡
应力、应变的变化有什么变化趋势?为什么?
蜗轮轴
习题3 :一个托架体的分析
材料 :
Alloy Steel(合金钢)
固定物体底座的二个孔。
S=2.8389 in2
约束:
施加均布力:
1000 psi(磅/平方英寸) 的法向均布力。
固定
施加 均布力
习题2 (no fillet)
使用网格控制
默认网格划分
中等程度网格控制
精细程度网格控制
习题2
尖角特征
圆角特征
由弹性力学理论,尖角处应力无穷大(P57)。 若对尖锐区域研究,必须设置圆角(P57)。 解压圆角特征,重新分析本例,网格划分时同时采用 “自动过渡”和“网格控制” (P58)。
求:
二个孔面上支反力 垂直面上的支反力 托架底部面上的支反力
习题4:固定支架的静态分析(P281)
中空的悬臂梁支架,背面固定;5000 lb的载荷 施加在围绕圆柱孔的分割面上。模型单位:in, 材料:AISI 304。
h方法(P283)
中海达静态传输及解算操作流程
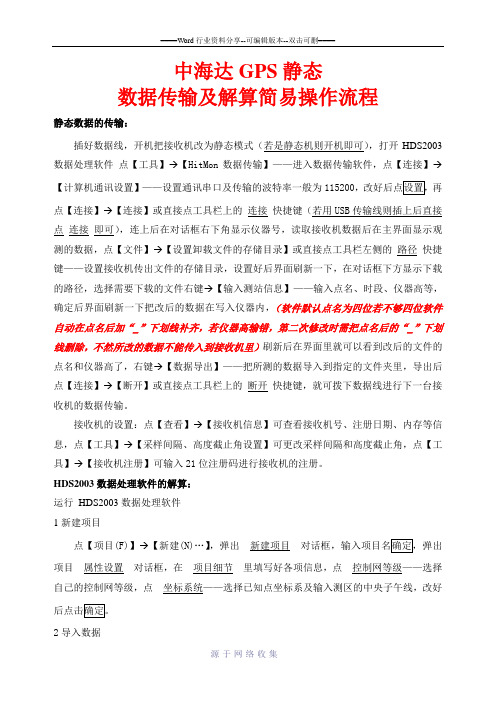
中海达GPS静态数据传输及解算简易操作流程静态数据的传输:插好数据线,开机把接收机改为静态模式(若是静态机则开机即可),打开HDS2003数据处理软件点【工具】→【HitMon数据传输】——进入数据传输软件,点【连接】→【计算机通讯设置】——设置通讯串口及传输的波特率一般为115200,改好后点设置,再点【连接】→【连接】或直接点工具栏上的连接快捷键(若用USB传输线则插上后直接点连接即可),连上后在对话框右下角显示仪器号,读取接收机数据后在主界面显示观测的数据,点【文件】→【设置卸载文件的存储目录】或直接点工具栏左侧的路径快捷键——设置接收机传出文件的存储目录,设置好后界面刷新一下,在对话框下方显示下载的路径,选择需要下载的文件右键→【输入测站信息】——输入点名、时段、仪器高等,确定后界面刷新一下把改后的数据在写入仪器内,(软件默认点名为四位若不够四位软件自动在点名后加“_”下划线补齐,若仪器高输错,第二次修改时需把点名后的“_”下划线删除,不然所改的数据不能传入到接收机里)刷新后在界面里就可以看到改后的文件的点名和仪器高了,右键→【数据导出】——把所测的数据导入到指定的文件夹里,导出后点【连接】→【断开】或直接点工具栏上的断开快捷键,就可拨下数据线进行下一台接收机的数据传输。
接收机的设置:点【查看】→【接收机信息】可查看接收机号、注册日期、内存等信息,点【工具】→【采样间隔、高度截止角设置】可更改采样间隔和高度截止角,点【工具】→【接收机注册】可输入21位注册码进行接收机的注册。
HDS2003数据处理软件的解算:运行HDS2003数据处理软件1新建项目点【项目(F)】→【新建(N)…】,弹出 新建项目对话框,输入项目名确定,弹出项目 属性设置 对话框,在 项目细节 里填写好各项信息,点 控制网等级——选择自己的控制网等级,点 坐标系统——选择已知点坐标系及输入测区的中央子午线,改好后点击确定。
静态软件使用教程
南方静态软件解算教程静态解算可以分为四个过程,下面我们从最基本的流程来讲解静态解算。
1.在将数据从接收机导入到电脑中后,保存在同一个文件夹下,如图1:图12.将数据导入到南方静态解算软件第一步:打开“南方测绘Gps数据处理软件”第二步:打开“文件”——“新建”,修改项目属性,工程控制网等级一般选择E级网,中央子午线,梧州选择111度,可以在“定义坐标系统”里面手动输入中央子午线,然后选择点击“确定”;图2第三步:导入静态数据,可以通过这里面的“数据输入”,选择“增加观测数据文件”,也可以用快捷键,如图3图3在“选择路径”里选中刚刚保存静态数据的地方“新建文件夹2”,然后“文件列表”里面就会显示静态数据,文件类型选“*.STH*.??O”,点击“全选”,然后点“确定”,这样静态采集的数据就以未结算的绿色基线的形式显示在右边的白框里面了,如图4图43.解算基线第一步:选择“基线解算”——“全部解算”,解算全部的基线,解算的时候可以通过左边菜单里面的“基线简表”,查看基线解算的全过程。
如图5:图5解算完毕后,凡是“方差比>3”或者“中误差>0.04”,说明基线粗差较大,解算不合格,在超限的地方会以打叉的形式显示。
(分析:基线解算不合格,原因通常有两种:一是静态采集时,设置的卫星高度截止角太小,以致于把一些卫星高度角度小的卫星数据也记录了,而这些数据质量通常是较差的; 二是采集数据的点位周围有很多对卫星造成干扰的因素,以致于卫星数据采集断断续续。
我们下面将针对这两种常见情况进行分析解决。
)第二步:重调基线以上面的解算为例,倒数第二条基线方差=2.25<3,超限;(1)用鼠标右键点击这条基线信息列表,然后点击鼠标左键,就可以看到这条基线的详细信息,如图6图6考虑到方差比超限可能是因为,卫星的高度截止角太低,可以在图中调节,调大高度解截止角,从20度调到30度,然后点“解算”,重新解算这条基线,看方差比是否能够不再超限。
天宝(Trimble)静态培训教程

地坐标)通过某种数学变换映射到平面上,这种变换又称为投影变换。投影 变换的方法有很多,如 UTM 投影、Lambuda 投影等,在我国采用的是高斯-克 吕格投影,也称为高斯投影。 (2) GPS 测量中常用的坐标系统 ①WGS-84 坐标系
② 卫星星历误差:卫星星历是 GPS 卫星定位中的重要数据。卫星星历是由地面 监控站跟踪监测 GPS 卫星测定的。由于地面监控站测试的误差以及卫星在空 中运行受到多种摄动力影响,地面监测站难以充分可靠地测定这些作用力的 影响,使得测定的卫星轨道会有误差。
5
③ 卫星钟差:卫星钟差是 GPS 卫星上所安装的原子钟的钟面时与 GPS 标准时间 之间会有偏差和漂移,并且随着时间的推移而发生变化。而 GPS 定位所需要 的观测量都是以精密测时为依据,卫星钟差会对伪码测距和载波相位测量产 生误差。当卫星钟差总量达到 1ms 时,产生的等效距离误差可达 300KM
卫星的轨道参数、卫星钟改正数和其它一些系统参数。用户一般 需要利用此导航信息来计算某一时刻 GPS 卫星在地球轨道上的位 置,导航信息也被称为广播星历。
4、GPS 误差
利用 GPS 定位时,GPS 卫星播发的信号受各种因素影响,使得测量结果 产生误差,精度下降。影响 GPS 定位精度的因素可分为下列几个方面:
(3) 精确的时间 ①GPS 工作卫星都安设有 4 台原子钟,一般是两台铷原子钟和两台铯原子钟。 ②GPS 接收机则装一个普通的石英钟,用接收 4 个卫星来消除时钟误差。 ③卫星和接收机的时钟都正确(无误差),那么 4 个卫星的测量结果应穿过同
9
一个点。 ④若卫星和接收机时钟存在误差时,测量结果无法相交于一个点时,接收机的处
静态测量和解算
静态测量和解算一、静态测量测量遵循的原则大家都知道,在布局上是由整体到局部,在精度上是由高级到低级,在次序上是先控制后碎部。
控制网是一个地区或者测区的统一坐标基准框架,是保证测量精度的重要因素,按等级可分为ABCDE,按不同行业分有城市公路铁路等等。
AB级网我们一般做不了,等级太高,要求太高,常见的都是C级及以下。
各个网的等级划分,观测时间长短,观测时段多少可参照云盘中上传的GPS测量规范2009。
南方的仪器在做控制网中需要更测量模式,从原来的基准站模式和移动站模式改为静态即可,不需要拧天线(之前见过用户做静态时“忘”带天线了,又开车回去取的,完全浪费时间)。
S86及S86-2013还有银河6,都可以通过面板去更改模式,很简单,不再赘述。
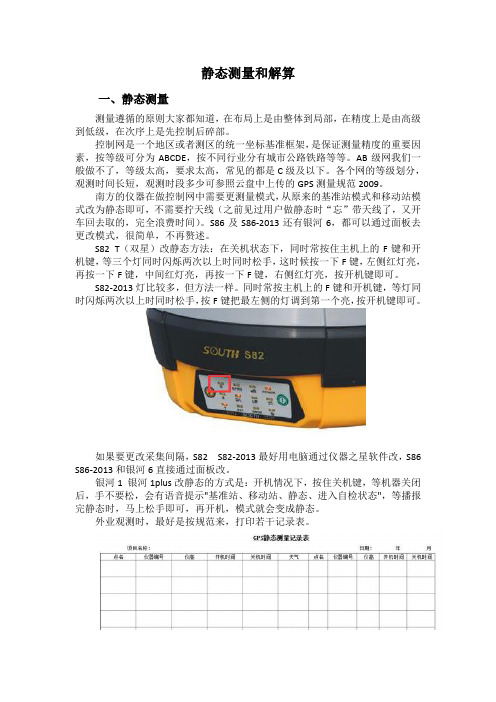
S82 T(双星)改静态方法:在关机状态下,同时常按住主机上的F键和开机键,等三个灯同时闪烁两次以上时同时松手,这时候按一下F键,左侧红灯亮,再按一下F键,中间红灯亮,再按一下F键,右侧红灯亮,按开机键即可。
S82-2013灯比较多,但方法一样。
同时常按主机上的F键和开机键,等灯同时闪烁两次以上时同时松手,按F键把最左侧的灯调到第一个亮,按开机键即可。
如果要更改采集间隔,S82 S82-2013最好用电脑通过仪器之星软件改,S86 S86-2013和银河6直接通过面板改。
银河1 银河1plus改静态的方式是:开机情况下,按住关机键,等机器关闭后,手不要松,会有语音提示"基准站、移动站、静态、进入自检状态",等播报完静态时,马上松手即可,再开机,模式就会变成静态。
外业观测时,最好是按规范来,打印若干记录表。
类似于这种,目的在于记录详细的外业观测记录,便于内业处理数据。
尤其是仪器高,好多次,用户打电话,仪器高忘记量了。
静态测量中,重复设站的点仪器高没量或者量错,不仅影响高程,平面也会影响。
观测时,没事就看看机器是否正常,电池电量是否够用。
仪器高的量取方法:仪器高按图上所示量取,86,86-2013,银河1 银河6测量仪器高时都需要用测高片,只有82 82-2013用斜高。
静态数据结果分析

2012-5-22
南方测绘仪器有限公司
20
网平差过程: 网平差过程
提取基线向量,构建 提取基线向量,构建GPS基线向量网 基线向量网
I. 三维无约束平差 II.约束平差/ II.约束平差/联合平差 约束平差 III.质量分析与控制 III.质量分析与控制
2012-5-22
南方测绘仪器有限公司
21
约束平差的具体步骤是:
分布不佳
分布颇好
2012-5-22
南方测绘仪器有限公司
23
提示:卫星星历预报软件的星历如何取得? 提示:卫星星历预报软件的星历如何取得?
答:南方星历预报软件StarReport可以使用的星历有两种格 南方星历预报软件 可以使用的星历有两种格 和南方的*.sth格式。yuma格式用户可以在软件的 格式。 式:Yunma和南方的 和南方的 格式 格式用户可以在软件的 帮助”菜单下执行“下载星历”直接从网上下载星历, “帮助”菜单下执行“下载星历”直接从网上下载星历, 网址是: 网址是: /FTP/GPS/ALMANACS/YUMA/
2012-5-22
南方测绘仪器有限公司
26
测量分类 A B C D E
固定误差a(mm) 固定误差 ≤5 ≤8 ≤ 10 ≤ 10 ≤ 10
比例误差b(mm) 比例误差 ≤ 0.1 ≤1 ≤5 ≤ 10 ≤ 20
相邻点距离D(Km) 相邻点距离 100~2000 15~250 5~40 2~ 15 1~10
2012-5-22
南方测绘仪器有限公司
8
基线解算
2012-5-22
南方测绘仪器有限公司
9
影响基线解算结果的因素主要有: 影响基线解算结果的因素主要有:
HGO静态解算项目总结报告的内容解释

HGO静态项目总结报告解释采用GPS静态测量具有测量精度高、全天候、数据处理自动化高、作业效率高、无需通视等多个优势,而且可以自动化的生成项目总结报告。
由于静态解算的时候我们只需要按照要求输入数据,并简单的进行调整就可以完成数据处理,所以很多时候项目报告出来了,拿到手里,只能看懂“合格”几个字,其他的都是天书。
现在静态解算执行的规范《全球定位系统(GPS)测量规范》2009,有好多人反应,这个规范对观测质量有更高的要求,一不注意基线就无法解算合格。
有时候作业单位费了好大功夫做完外业测量,内业不合格,然后GPS接收机都是从别的项目借来用的,都还回去了,没办法,他们就会手动改一些数据和结果,作为监理的你如果只能看懂“合格”几个字,就会被忽悠过去了。
其实看懂报告并不难,只要用心想一想,不懂的百度搜索一下就能明白。
现在将我从网上学到的分享一下给大家。
下面用的解算报告是我从网上下载的静态数据,用HGO软件自动处理出来的结果,里面有不合格的地方,这个不影响分析报告内容。
第一章项目总结报告的内容和项目基本信息1.1 项目总结报告的内容直接看项目总结报告的第一页,就是目录(如下图)。
包括四个部分:项目属性、观测文件、基线解算、平差结果。
1.2 项目属性从上边的报告来看,项目单位是中建,责任人是迈克尔铁柱,这是我们在解算软件中输入的基本信息(如下图)1.3 坐标系统从报告上看椭球是国家80,中央子午线为117°,采用高斯3°带投影。
这个要根据实际填写(如下图),尤其是坐标系统,当地椭球、投影方法、中央子午线都必须按照目标坐标系已经给出(设计图纸或者已有控制点坐标成果)的信息填写,不能按照自己的理解填写,因为控制点的成果(大多数成果都是投影坐标和正常高程)对应的唯一一种坐标系。
1.4 解算数据这部分是解算的工作量及基本质量信息。
从解算数据可以看出来,本项目的观测文件数量为92个,这个是从接收机导出来的数据文件的个数,也就是所有接收机观测时段总数;站点个数为48个,这是本次观测总共48个点;形成基线总条数为138条,这个是观测形成的所有基线数量,计算方法为∑N i (N i −1)2C i=1,i 为时段,N i 为接收机数量,C 为观测时段总数;重复基线数量为22条,其中1条不合格;同步环个数为92个,其中16个不合格,异步环个数为88个全部合格,同步环和异步环的HGO 软件默认都是3边形,这个可以设置,如下图:第二章 观测文件项目总结报告的第2部分内容如下图:观测文件个数为92个,所以这个表格的主体内容有92行,第一列为观测文件的文件名,第二列为采样间隔(外业观测时候设置的),第三、四、五列为开始时间、结束时间、观测时长,是自动获取的,第六列为观测文件对应的站点名,天线高为自己量取并输入的,接收机编号为自动获取。
静态解算

第一章静态处理软件简介和安装1.1 软件简介和计算机配置要求1.2 软件安装步骤双击软件压缩包,弹出图示如图1-1所示,软件开始自解压,解压完毕进入软件安装的提示窗口如图1-2所示。
图1-1 解压窗口图1-2 安装提示窗口在“安装提示窗口”中用鼠标单击“下一步”,弹出图示有关软件使用协议说明如图1- 3所示:图1-3 协议窗口同意安装协议并用鼠标单击图1-3“是”,安装将继续,窗口提示软件安装到计算机中的安装路径如图1-4所示:图1-4 安装路径提示窗口点击图示1-4中的“浏览”,可选择自定义安装本软件的路径,当然也可使用图示默认路径“C:\Program Files\南方测绘仪器公司\GPSSouth”安装,选择好路径后用鼠标单击“下一步”弹出图1-5:图1-5 软件安装过程窗口进度条达到100%后,弹出图1-6所示界面,点击“完成”,软件安装完毕。
图1-6结束窗口软件安装完毕后,在计算机的桌面自动生成“南方GPS数据处理”和“南方GPS后处理差分”快捷方式。
1.3 软件启动和操作步骤点击“南方GPS数据处理”桌面快捷方式进入基线处理软件,界面如图1-7:图1-7 GPS处理软件界面主界面软件主界面由菜单栏、工具栏、状态栏以及当前窗口组成,并采用了工程化的管理模式,因此,在使用之前必须按照要求创建工程项目。
软件的基本操作步骤如下:一、点击“文件”菜单下的“新建”项目,弹出界面如图1-8所示,图1-8 新建工程项目在对话框中按照要求填入“项目名称”、“施工单位”、“负责人”,选择相应的“坐标系统”、“分度带”、“控制网等级”、“基线剔除方式”,最后点击“确定”按钮,完成操作。
二、增加野外观测数据将野外GPS采集数据调入软件,这些数据是南方公司的专用格式*.STH。
三、GPS基线处理处理合格后要检查异步、同步环闭合差四、对整网进行约束平差五、检查和打印成果上述各项操作将在下面文中分章节进行详述。
第二章软件功能和菜单介绍2.1 软件基本功能及界面GPSADJ4.0基线处理平差软件是对GPS星历单、双频数据进行处理和平差的专业GPS内业解算软件。
怎样使用TEQC软件对华测静态数据分析
怎样使用TEQC软件对华测静态数据分析上海华测中试部王振国TEQC (Translating, Editing and Quality Check)软件是由美国UNAVCO开发的一款GPS/GLONASS数据预处理工具软件。
顾名思义,它有三项基本功能:数据格式转换、数据编辑与数据质量检核。
由于简单有用同时能较好地反映GPS数据质量与GPS接收机的性能,故常被包含IGS(International GPS Service)在内的一些GPS用户用作对数据分析、编辑或者对接收机进行测试。
鉴于TEQC对数据分析的可靠性与有用性,研究它关于我们来说是很有意义的。
目前,我们已经使用到TEQC的几个方面有:1、华测CORS扼流圈天线的测试。
2、华测不一致型号接收机基本性能的对比测试。
3、其它各类GPS天线的测试。
4、华测静态数据的切割。
以上四个方面中,前三个使用的是TEQC的数据质量检核功能,第四个方面涉及到TEQC 软件的数据编辑功能。
目前,TEQC在某些功能暂时还不支持华测格式原始数据(比如我们HCN格式的原始数据目前并不能使用TEQC来转换为Rinex格式数据)。
本文要紧从应用角度介绍数据编辑与质量检核方面部分功能。
一华测静态数据的切割平常工作中,有的时候会遇到需要截取部分静态数据的情况。
比如客户在一个操纵点上做了一个小时静态,由于失误在没有关机的情况下将接收机移动到下一个点上进行测量,如今就会导致星历错误,数据无法使用。
这种情况下,为避免重测,我们就能够利用TEQC软件的数据编辑功能对观测文件进行切割,截取前一个小时的数据继续使用,这样就降低了客户的缺失。
截取华测静态数据的方法是这样的(以900538241u.HCN为例):第一步,将HCN格式的华测静态数据转换为RINEX格式。
能够使用我们华测COMPASS软件自带的RINEX转换软件()转换,转换后的RINEX数据版本为2.10(900538241u.09O,900538241u.09N)。
Trimble RTX技术性能测试与应用分析

摘 要:文章介绍了 RTX系统组成及服务类型,通过现场实际测试,统计 RTX收敛时间、内符合精度、
外符合精度及后处理精度,测试结果表明:(1)RTX初次收敛时间约为 30min;(2)内符合精度平面优于
2cm、高程优于 4cm,外符合精度平面优于 6cm、高程约为 10cm;(3)RTXPP直接解算的 CGCS2000坐
2005.00,与最新的 WGS84(G1762)坐标系存在微小差异。WGS84(G1762)与 ITRF2008历元 2005.00基本
位精度。
从本质上说,RTX是采用精密单点定位技术进行定位
的,其既可以实现实时精密单点定位,也可用于事后处理。
与其他星站差分系统组成类似,RTX系统主要包含 GNSS
卫星系统、RTX卫星跟踪网络、L波段通信卫星 /互联网系
图 1 RTX系统组成
统、用户系统。
Fig.1RTXsystem composition
368
水 道 港 口
第 40卷第 3期
地方进行厘米级定位。其系统组成见图 1。
RTX系统工作原理为:利用分布于全球的约 100个跟
踪站,连续获得实时卫星(包括时钟误差、轨道误差)和大气
数据,通过高度准确的模型和算法来生成 RTX差分数据,
然后将差分数据以 CMRx格式进行压缩后注入 L波段对地
静止卫星或互联网后广播到 GNSS接收机,从而提高其定
第 40卷第 3期
2019年 6月
水 道 港 口
JournalofWaterwayandHarbor
Vol.40 No.3 Jun.2019
TrimbleRTX技术性能测试与应用分析
吴建梅1,2,柯 敏1,2 ,房新玉1,2
ppk分析报告

PPK分析报告1. 简介本篇文章旨在对PPK分析进行介绍和解析。
PPK(Parameter, Process, KPI)分析是一种常用的质量管理方法,用于确定和改进任何过程的关键参数和关键绩效指标(KPI)。
2. PPK分析的步骤2.1 确定关键参数在进行PPK分析之前,我们首先需要确定我们要分析的关键参数。
关键参数是指对于一个过程或产品来说,对其质量和性能有重要影响的参数。
通过对关键参数的分析,我们可以找到影响过程稳定性和性能的关键因素。
2.2 收集数据在确定了关键参数之后,我们需要收集相关的数据。
这些数据可以来自于过程的实际运行情况、实验数据或者其他可靠的来源。
收集的数据应该包括关键参数的取值和相应的性能指标。
2.3 统计数据分析在收集到数据之后,我们可以进行统计数据分析。
通过对数据进行统计分析,我们可以了解关键参数的分布情况、均值、方差等统计指标。
这些统计指标可以帮助我们评估过程的稳定性和性能。
2.4 确定关键绩效指标在统计数据分析的基础上,我们可以确定关键绩效指标。
关键绩效指标是用来衡量和评估过程性能的指标。
常用的关键绩效指标包括过程能力指数(Cpk)、过程稳定性指数(Ppk)等。
2.5 PPK计算通过确定了关键参数和关键绩效指标,我们可以进行PPK计算。
PPK的计算公式为:PPK = min((USL - X_Bar) / (3 * σ), (X_Bar - LSL) / (3 * σ))其中,USL为上限规格限,LSL为下限规格限,X_Bar为关键参数的均值,σ为关键参数的标准差。
2.6 PPK分析和改进通过进行PPK计算,我们可以得到PPK的值。
根据PPK的值,我们可以对过程的性能进行评估。
当PPK的值大于等于1.33时,说明过程具有良好的能力和稳定性;当PPK的值小于1.33时,说明过程存在一定的问题,需要进行改进。
在进行PPK分析之后,我们可以根据分析结果进行改进。
改进的方法可以包括调整关键参数的取值、改变工艺流程、提供员工培训等。
PP—R材料在准静态加载下的断口形貌研究

Science and Technology, K unm ing, Y unnan,650500) Abstract:I—mode and mixed—m ode fracture surface morphology of polypropylene ran— dora (PP—R)materials under high—cycle fatigue load and quasi-static load were observed by using SEM and macroscopic fracture morphology.The fracture mechanism of PP—R was studied.The results show that the crack of PP—R m aterial belongs to ductile fracture in the stable expansion of the region,and belongs to brittle fracture in the high—speed ex— tension area,and belongs tO ductile fracture in prefabricated stage of fatigue crack under quasi—static loading and m ixed—m ode loading. Key words: polypropylene random ; quasi—static; fracture surface m orphology; crack propagation
千寻星矩后处理软件静态解算

千寻星矩后处理软件静态解算1. 介绍千寻星矩后处理软件是一款用于静态解算的工具,它可以帮助工程师和科研人员对各种结构进行力学分析和优化。
本文将深入探讨千寻星矩后处理软件在静态解算方面的应用。
2. 静态解算的基本原理静态解算是指在结构受到静力负荷作用下,通过求解结构的平衡方程和约束条件,推导出结构的内力、位移等物理量的过程。
静态解算的基本原理是根据受力平衡条件和材料本构关系,建立结构的刚度方程,然后通过求解刚度方程得到结构的响应。
3. 千寻星矩后处理软件的优势千寻星矩后处理软件在静态解算方面具有以下优势:3.1 界面友好千寻星矩后处理软件的界面简洁明了,操作简单直观。
用户可以通过鼠标点击和拖拽等方式进行模型建立和加载,同时软件提供了丰富的预处理和后处理功能,方便用户对模型进行编辑和分析。
3.2 多种求解器支持千寻星矩后处理软件支持多种求解器,包括有限元法、边界元法等。
用户可以根据具体需求选择不同的求解器,以获得更准确和高效的解算结果。
3.3 强大的后处理功能千寻星矩后处理软件提供了丰富的后处理功能,包括应力分析、位移分析、变形分析等。
用户可以根据需要对结构的各种物理量进行可视化显示和分析,帮助用户更好地理解结构的行为。
3.4 高性能计算千寻星矩后处理软件采用了高性能计算技术,能够充分利用计算机的多核处理能力和分布式计算资源,提高解算效率。
同时,软件还支持并行计算和云计算,可以处理大规模和复杂的结构模型。
4. 千寻星矩后处理软件静态解算的应用案例千寻星矩后处理软件在静态解算方面的应用非常广泛,以下是一些典型的应用案例:4.1 建筑结构分析千寻星矩后处理软件可以对各种建筑结构进行静态分析,包括房屋、桥梁、塔楼等。
通过建立结构模型、施加荷载和约束条件,软件可以计算出结构的内力、位移等物理量,帮助工程师进行结构设计和优化。
4.2 机械零件强度分析千寻星矩后处理软件可以对各种机械零件进行强度分析,包括机床、汽车发动机、飞机机翼等。
GPS静态基线解算质量控制指标解析(doc 7页)
GPS静态基线解算质量控制指标解析(doc 7页)GPS静态基线解算质量控制指标分析建筑工程学院测绘工程2004级学生:卢国鹏指导老师:肖东升摘要:GPS基线解算是进行网平差的基础。
基线解算质量的好坏将直接影响到GPS 网的定位精度和工作效率。
本论文研究的内容如下:讨论了GPS基线解算的质量控制指标、GPS网几何关系对基线解算质量的影响,并就各指标对基线解算的影响做了分析,提出了提高基线解算精度的方法。
关键词:静态基线解算质量控制指标分析Analysis on the Quality Control Index of the GPSStatic Baseline ComputationAbstract:Baseline computation is the basis of network adjustment. The quality of baseline computation is good or bad directly influences the positioning accuracy of GPS network and work efficiency. The main contents of this paper are as follows:Discuss quality control index of GPS baseline computation and the influence of GPS network geometric relation on the quality of baseline computation, and then made an analysis on the influences of all indexes on baseline computation. The methods to improve the accuracy of baseline computation were proposed.Key words: static baseline; computation; quality control index; analysis一、GPS基线解算的基本模型基线解算一般采用差分观测值,较为常用的差分观测值为双差观测值,即由两个测站的原始观测值分别在测站和卫星间求差后所得到的观测值:其中::双差分算子; )(f dd φ:载波相位观测值;fv :改正数;ρ:站星距离;ion ρ:电离层延迟; trop ρ:对流层延迟;fλ:波长;n m fN ,:整周未知数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
748
北京测绘
第 32 卷 第 6 期
表2 犌犃犕犐犜 解算参数设置
参数类型
参数设置
数据采样间隔
15sCΒιβλιοθήκη oiceofObservableLC_AUTCLN
ChoiceofExperiment
BASELINE
TypeofAnalysis
1ITER
Etidemodel
IERS03
Tidesapplied 全球海潮模型
31 otl_FES2004.grid
ElevationCutoff
10
Intervalzen
2
Antenna Model
NONE
Inertialframe
J2000
DMap
GMF
WMap
GMF
表 2 中 ,对 于 ChoiceofExperiment,选 择 BASELINE时将固定 轨 道并 在 GAMIT 处 理 中 和 输出h-文件时忽略轨道参数;采用默认的 BASE LINE。 选 择 了 urum、guao、chum、pol2 和 sele五 个 IGS 基 准 站 参 与 计 算 ,对IGS 站 进 行 紧 约 束 (0.03, 0.03,0.05),其余点松约束(30,30,30)。
随后,Trimble提供了新的后处理服务 RTX PP[1]。这 个 应 用 服 务 允 许 用 户 上 传 GNSS 观 测 数 据 到 Trimble公 司 RTX 后 处 理 服 务 中 心 , 用户可以 选 择 不 同 的 坐 标 系 和 构 造 板 块 来 获 取 最 终 的 定 位 成 果 。 观 测 数 据 达 到 24h 后 , RTXPP 解 算 结 构 水 平 和 垂 直 方 向 精 度 能 优 于 1cm。 因 为 解 算 收 敛 时 间 远 小 于 1h 时 ,因 此 仅 仅利用1小时观测的数据水平方向精度通常优 于 2cm[4]。
第 32 卷 第 6 期 2018 年 6 月
北京测绘 BeijingSurveyingand Mapping
引文格式:冯健,陈灏.TrimbleRTXPP 静态解算结果分析[J].北京测绘,2018,32(6):747749. 犇犗犐:10.19580/j.cnki.10073000.2018.06.027
1 犌犃犕犐犜/犆狅狊犪犌犘犛 数 据 处 理
GAMIT/GLOBK 是 由 美 国 麻 省 理 工 学 院 (MIT)和斯克 里 普 斯 海 洋 研 究 所 (SIO)联 合 开 发的高精度数据处 理 软 件,其 解 算 精 度 高 并 且 开 放源代码,使用者可以根据需要进行源程 序的 修 改,因此已广泛应用 于 长 距 离、高 精 度、长 时 间 的 GPS 定位数据处理。本文数 据处 理使 用10.5 版 本 ,处 理 策 略 如 表 2 所 示 。
接收机型号 5700 5700 5700
天线类型 TRM39105.00 TRM39105.00 TRM39105.00
[收稿日期] 2017 10 16 [作 者 简 介 ] 冯 健 (1990- ),男 ,新 疆 乌 鲁 木 齐 人 ,硕 士 ,测 量 工 程 师 ,从 事 大 地 测 量 及 测 量 工 程 工 作 。 犈犿犪犻犾:489446341@qq.com
Vol.32 No.6 June2018
犜狉犻犿犫犾犲犚犜犡犘犘 静态解算结果分析
冯 健 陈 灏
(新疆维吾尔自治区煤田地质局综合地质勘查队,新疆 乌鲁木齐 830000)
[摘 要] 介绍 天 宝 (Trimble)的 实 时 差 分 扩 展 技 术 (RealTimeeXtended,RTX)并 在 实 际 项 目 中 测 试 TrimbleRTX 后处理在中国内陆解算精度,同时利用在工程实践中得到认可的解算模式 GAMIT/CosaGPS对比 分析结果。实验结果表明,两者定位结果相差在1-2cm,延长数据观测时长,后处理服务 RTXPP定位能达优于 1cm 精度。在一般的工程项目中完全可以运用 Trimble 的 RTX技术快速获得定位结果,极大的方便了作业模式。
本文使用 新 疆 叶 城 某 煤 矿 区 控 制 网 一 个 时 段数据 进 行 解 算,表 1 是 测 站 野 外 观 测 记 录 信 息,原始观测数据 为 天 宝 的 T01 格 式,利 用 Con verttoRinex软 件 转 换 成 标 准 格 式 Rinex,并 利 用 TEQC 软件检测数据质量。
点名 P001 P002 P003
天 线 高/m 1.205 1.293 1.261
观 测 时 长/h 6.579 5.442 5.225
表 1 测 站 野 外 观 测 记 录 信 息
采样率 15
mp1 0.38
mp2 0.45
15
0.35 0.29
15
0.46 0.47
o/slps 12533 10352 9916
Trimble的 RTX 技 术 无 疑 大 大 的 简 化 了 常
规 GPS静态作业模式,方便且快速获得高精度 定 位结果,特 别 是 在 没 有 足 够 测 绘 基 础 设 施 的 地 区。然而这 种 模 式 在 中 国 大 陆 地 区 的 可 靠 性 少 有文章提及,本文利 用 实 测 数 据 与 GAMIT/Cos aGPS解 算 坐 [57] 标 进 行 对 比 分 析 RTX 解 算 精 度 ,为 工 程 实 践 提 供 更 多 的 技 术 方 法 。
[关 键 词 ] 实 时 扩 展 ;静 态 测 量 ;解 算 精 度 [中图分类号] P207+ .2 [文献标识码] A [文章编号] 1007-3000(2018)06-0747-3
0 引 言
早在2011年,Trimble公司 介 绍 了 一 种 新 型 的 实 时 查 分 扩 展 技 术 CenterPointRTX(Real TimeeXtended),实 时 的 GPS/GLONASS 卫 星 精确轨道和钟差 数 据,这 种 实 时 定 位 服 务 能 不 依 赖基准站 就 提 供 厘 米 级 定 位 精 度。 相 比 其 他 在 线提 供 PPP(精 密 单 点 定 位 )[13]服 务 的 系 统, TrimbleRTX 支 持 日 本 的 QZSS 信 号,以 此 提 升 了载波相位模糊度求解及其收敛能力。