DTPS操作顺序及其教程
PDPS软件基本操作
部或单个布局保存 – 可以在不同窗体布局之间切
换,以适应不同规划内容的 要求
鼠标操作
鼠标功能:
– 左键单击/拖动:选择/框选 – 右键单击:功能菜单,按住移动 – 右键拖动:视角平移 – 中键拖动:视角缩放 – 右键+中键拖动:视角旋转
三维浏览:
– :旋转中心
操作树 Operation Tree Viewer
• 产品制造所需的所有 工艺操作
• 显示操作与零件、资 源之间的关联关系
Process Designer & Simulate软件基本界面
资源树 Resource Tree Viewer
• 显示产品制造所需要的所有生 产设备及工具
• 显示生产设备的所属关系和层 次结构
装配树 Logical Collection Tree
• 显示产品在工艺工程中的上件 顺序和流动顺序
• 显示产品在工艺中的装配关系
Process Designer & Simulate软件基本界面
快捷视图 Snapshot Editor
• 创建、编辑当前项目的快捷视 图
• 编辑输出截图图片
Process Designer & Simulate软件基本界面
Process Designer & Simulate软
产品树 操作树
视图窗口 快捷视图区
装配树 项目树
关系树 资源树
Process Designer & Simulate软件基本界面
导航树 Navigation Tree Viewer
• 显示整个项目的基本结构 • 同时包括了产品树、资源树和操作
PDPS培训教程

PDPS培训教程一、教学内容本节课的教学内容选自人教版小学数学四年级下册第五单元《分数的加法和减法》的第90页至92页。
主要包括分数加法和减法的基本概念、运算规则、计算方法以及实际应用。
二、教学目标1. 让学生掌握分数加法和减法的基本概念,理解运算规则。
2. 培养学生运用分数加法和减法解决实际问题的能力。
3. 培养学生的团队合作精神,提高学生的动手操作和动脑思考能力。
三、教学难点与重点重点:分数加法和减法的运算规则,计算方法。
难点:理解分数加法和减法的实际应用,解决实际问题。
四、教具与学具准备教具:黑板、粉笔、多媒体教学设备。
学具:练习本、铅笔、橡皮、分数加法和减法的计算器。
五、教学过程1. 实践情景引入:教师展示一个实际问题:小明有2个苹果,小华给了小明1个苹果,请问小明现在有几个苹果?2. 例题讲解:教师讲解分数加法和减法的概念,如:$\frac{2}{3} +\frac{1}{3} = \frac{3}{3} = 1$,$\frac{3}{4} \frac{1}{4} = \frac{2}{4} = \frac{1}{2}$。
3. 随堂练习:学生自主完成教材第90页的练习题,教师巡回指导。
4. 小组合作:学生分组讨论,运用分数加法和减法解决实际问题,如:甲组有5个苹果,乙组给了甲组2个苹果,请问甲组现在有几个苹果?六、板书设计黑板上书写分数加法和减法的运算规则,例题,以及学生在实际问题中的解答过程。
七、作业设计1. 请完成教材第91页的课后练习题。
答案:(1)$\frac{2}{5} + \frac{3}{5} = 1$(2)$\frac{3}{4} \frac{1}{4} = \frac{1}{2}$答案:小明现在有$\frac{4}{4} + \frac{1}{4} =\frac{5}{4}$个苹果。
八、课后反思及拓展延伸本节课学生掌握了分数加法和减法的基本概念,能够运用运算规则解决实际问题。
D+QTP实用操作手册

23
测试实现—实现testCase Action
整理课件
24
测试实现—实现testCase Action
整理课件
25
测试实现—实现testCase Action
• 说明:insert call to copy… 与 insert call to Exists… • 假设要在ActionA中调用ActionB • call 是获得ActionB的引用,只是引用,如果原本的ActionB的内容发生了变化,
整理课件
26
测试实现—实现testCase Action
• 9 确定要调用的新增的Action的传入参数 • 根据页面的信息,新增银行付款业务时,需要输入以下数据: • 付款方客户编号 • 付款方账户号
• 开户行编号 • 收款方账户编号 • 收款方名称 • 汇入行所在省 • 汇入行所在市 • 汇入行名称 • 金额 • 支票号 • 报单号 • 摘要
整理课件
15
测试实现—实现testCase Action
整理课件
16
测试实现—实现testCase Action
• 4 按照脚本的说明信息,将基础的业务功能脚本分割成多个resuable 的Action。注意:分割了的Action,不能再合并。
整理课件
17
测试实现—实现testCase Action
• 添加对脚本的描述说明文字。说明脚本实现的内容、目的
整理课件
8
测试设计——在TD中录入测试用例
• 录入所有的步骤。如果是业务功能的基础脚本,每一个step,就对应 一个业务功能。如果该脚本是用来描述一个测试用例的,则一个step 就是一个操作。
整理课件
9
PDPS入门
1.整体界面介绍
安装软件完毕后,启动主程序Process Designer,经过登录和Logo画面,然后 就是图示项目选择画面,此列表新安装客户应当是空的,直接点击Cancel跳过
然后进入软件主界面,可以看到除了主菜单和主按钮栏,其他都是由各个小窗口构 成,这些窗口可以任意拖放,合并,隐藏(每个窗口右上角有隐藏和关闭按钮)。 这些窗口的布局称为Layout,程序内置多种方案供选择,图示是Standard方案,用 户可以根据自己操作习惯,任意修改,退出程序时,会有提示是否保存当前修改, 这里指的修改就是对界面布局的修改。
2.创建和整理结构
Process Designer是一个依赖数 据库的软件,他的所有数据分成 2部分: 一部分是3D数模,这部分数据是 放在sysroot下,这个文件夹的名 字可以随便取,只要在程序内 Options下告诉程序这个文件夹在 哪即可,所以不用担心A机器上 的成果到了B机器上看不了; 另一部分数据是3D数模的相互关 系,这部分数据是存储在Oracle 数据库中的,无法象3D数模这样 在Windows下查看,只能用程序 将这些关系以XML的形式导出和 存放。 所以,完整的PD成果必须包含该 模拟中所需要调用的数模和对应 的XML 本章将讲述如何新建项目然后导 出成果
8
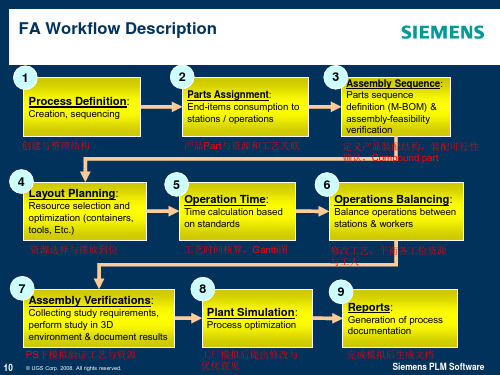
Plant Simulation:
Process optimization
9
Reports:
Generation of process documentation
PS下模拟验证工艺与资源
10
© UGS Corp. 2008. All rights reserved.
工厂模拟后提出修改与 优化意见
拓普康GPS操作流程PPT课件
在进行测量之前首先将已知的坐标数据输入手簿中,以便后来进行参数转换时调用
首先设置一下点的类型,以及坐标输入顺序等信息,确定即可
点击“增加”输入点号,坐标值,确定即可.按照此种方式便可完 成继续增加已知点的工作.
坐标转换
点击“增加”进行坐标之间的转换 L/O/G/O
分别从坐标库中调用相应点的地方坐标跟WGS84坐标确定即可(用三个或者三个
注意:一旦参数集设置成功后,每次测量时只要选择这个参数集“完成”即
可.
与接收机建立蓝牙无线连接
在蓝牙前打对勾”确定”后,会弹出蓝牙搜索界面,选择相应的仪器号连接即可
建立连接后会发出声响并且右上角的圆圈会形成闭合状
设置基准站
如果基站架在未知点上输入相应的点号,仪器高,点击“自动定位”大约等一分 钟,停止后点击“设置基准站”即可,系统会提ቤተ መጻሕፍቲ ባይዱ您基准站设置成功.
设置流动站的RTK格式跟高度角
设置流动站的电台跟电台连接参数
设置流动站的天线类型,天线高, 测量类型
设置解的类型,观测次数等
设置放样参数,如距离限差,参考方向解的类型
设置多路径抑制,共同跟踪技术,卫星定位系统以及RTK定位方式
点击”完成” 即返回到TopSURV主界面,开始进行相应的测量工作
如果基站架在已知点上,可以从坐标库中调用事先输入的该点的WGS84坐标 点击“”设置基准站“即可.系统会提示您基准站设置成功.
我们在“测量”的“状态”对话框中查看一些卫星的基本信息.
基准站设置成功后,点击右上角的蓝牙连接图标(如图),断开跟基准站的连接, 选择流动站的机身号建立跟流动站连接,进行测量即可.
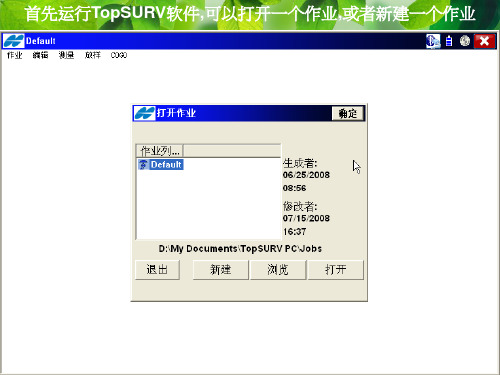
首先运行TopSURV软件,可以打开一个作业,或者新建一个作业 L/O/G/O
DTPS教程
唐山松下产业机器有限公司
选择Position标签,设定 机器人Z向位置990mm。 把机器人调到合适位置上。
唐山松下产业机器有限公司
双击R001-ROBOT
弹出
选择External Axis标签
G1、G2轴为回转轴,Type选择Rotation/Tilt
给要建立的 Installation Link (设备链接)命名
输入要建立的 Installation Link(设备链接)的保存地址
选中“新建”
唐山松下产业机器有限公司
Installation Link(设备链接)被新建
目录
1、认识DTPS
2、Installation Link(设备链接)的生成
单击
弹出
选择合适 的机器人 例如:TA1400
单击OK
单击OK
唐山松下产业机器有限公司
机器人成为TA1400
编辑工具矢量
从左侧窗口中选择 一个工具 例如:TOOL01(工 具1)
唐山松下产业机器有限公司
此处已设定 了默认的标 准矢量
在该窗口中设定工具矢量参数 (工具矢量由技术人员计算)
编辑外部轴
2、Installation Link(设备链接)的生成
3、Installation(设备)的建立
4、Installation(设备)属性的编辑
5、编辑外部轴 回转变位机的编辑 行走变位机的编辑 在设备中添加变位机 建立机器人和变位机的关联(设定外部轴)
6、编辑(导入)工件
7、编辑程序
8、双协调的设定
6、编辑(导入)工件
7、编辑程序
拓普康GPS RTK的使用_徐宇飞编制

拓普康GPS RTK的使用1.新建作业接收机、手簿都开机,将手簿连到基准站接收机上。
运行TopSURV软件,并新建作业,步骤如下:2.测量模式设置3.基站设置点击蓝牙图标连接基站蓝牙这里选择基站的蓝牙↓听到蓝牙连接完成提示后,点击设置GPS→设置基准站↓点击左上角图标→设置电台,等待读取频率读取完成后点击“设置电台”→“正在打开菊花链”“正在连接菊花链”→“modem setup successful ”关闭点击“自动定位”等候60″,点击“设置基准站”出现如下图4.流动站设置点击蓝牙图标,连接流动站的蓝牙出现以下界面选择流动站蓝牙→点击Select,等待蓝牙连接提示。
流动站连接好后,TopSURV 主界面下点击测量→点测量出现如下界面,点击左上角图标→电台设置(跟基准站一样)设置完成后点击“设置电台”→“正在打开菊花链”→“正在连接菊花链”→“modem setup successful ”→关闭(流动站设置完成)5.坐标参数得来拿着流动站到已知点(三个或三个以上)上采集WGS-84坐标数据,点名前加个84- ,以示区别。
注:在所有的设置完成后,有可能出现蓝牙断开的声音提示,而且没有信号,这时不要去管他,等一到两分钟,就有信号了。
在T opSURV 主界面中,点击设置G PS→地方坐标转换,进入如下图所示“坐标转换”界面点击左上角图标→点编辑,分别输入地方坐标系的与采集点相对于的控制点坐标,点击确定。
图1在该界面中点击【增加】,显示图下图所示“增加转换点”界面界面中,点击点列表图标分别调入控制点的地方坐标及WGS84 坐标,然后点击【确定】返回到图1。
在图1界面中继续点击【增加】将其他控制点增加为转换点,增加完控制点后点击【转换参数】。
当三个控制点作为转换点全部增加完成后,界面显示如下图点击【转换参数】后,查看其中“H 残差”与“V 残差”栏分别表示使用该转换参数进行坐标转换后在该点上的剩余误差,一般不要超过2cm。
DELPHI DATASNAP 2010 入门操作(2)不写一行代码,绿色三层我也行

DELPHI DATASNAP 2010 入门操作(2)不写一行代码,绿色三层我也行没有一行代码的三层,功能肯定非常的简单,但是,再简单,我们也三层了,学习一个东西,需要从入门开始就有兴趣,如果入门就给吓怕了,哪么后来何来信心学习呢?现在就让我们开始吧,不只是没有华丽的词语,而是连用词都不专业,因为,我也只是一个入门者。
我所用的版本为:Embarcadero® Delphi® 2010 Version 14.0.3593.25826一、让我们file->new->other ,再选datasnap server ,或者F6,输入datasnap如图,我们有两个可选项datasnap server :选择这一项,我们得到的将是一个独立EXE的三层服务器应用程序(TCP及HTTP两种模式) datasnap WebBroker application:选择这一项我们得到的是一个基于ISAPI的程序,需要把程序发布到IIS 等上面才可以运行选择第一基的配置方便,但是如果并发访问量大的话,需要编程者的水平高才可以,选择第二项则配置麻烦,但是由于HTTP 是无连接模式,理论上对并发量的控制都交给了IIS了,而不是我们的应用程序了(本处如果说得不对的请指点,谢谢!)现在我们选择第一项出现如下图所示的界面:应用程序类别(you may select from one of the following applition types):分别为VCL应用程序控制台应用程序服务应用程序需要选择哪一项,就看你自己的需求了服务类别(you may select from one or more communication protocols):可选TCP,HTTP,或者TCP+ HTTP ,也就是同时支持TCP及HTTPhttp下面有一个authentication,按字面意思是需要认证吧,具体细节,还来不及去研究是否包含简单类:add server methods class当然要包含拉,不然我们自己去写,很麻烦的ancestor(先辈),是指从什么模块继承下来,我们分别把各个的上层列出来,你就知道该选什么了吧TPersistent:TServerMethods1 = class(TPersistent)--> TPersistent = class(TObject) TDataModule:TServerMethods1 = class(TDataModule)-->TDataModule = class(TComponent)--> TComponent = class(TPersistent, IInterface, IInterfaceComponentReference)--> TPersistent =class(TObject)TDSServerModule:TServerMethods1 = class(TDSServerModule)--> TDSServerModuleBase =class(TProviderDataModule)--> TProviderDataModule = class(TDataModule)-->TDataModule =class(TComponent)--> TComponent = class(TPersistent, IInterface, IInterfaceComponentReference)--> TPersistent = class(TObject)包含简单示例:include sample methods可选可不选,如果你已经熟悉了的,哪就没有必要选拉该选什么,自己跟据能力及需求定吧,现在我们就都选默认项,点ok下一步吧!自动生成了三个模块,第一二个上面空白的,第三个则如图我们再看看生成的单元内容是什么unit ServerMethodsUnit1;1unit ServerMethodsUnit1;23interface45uses6 SysUtils, Classes, DSServer;78type9 TServerMethods1 = class(TDSServerModule)10private11{Private declarations }12public13{Public declarations }14function EchoString(Value: string): string;15end;1617implementation1819{$R *.dfm}2021function TServerMethods1.EchoString(Value: string): string; 22begin23 Result := Value;24end;2526end.unit ServerContainerUnit1;1unit ServerContainerUnit1;23interface45uses6 SysUtils, Classes,7 DSTCPServerTransport,8 DSServer, DSCommonServer;910type11 TServerContainer1 = class(TDataModule)12 DSServer1: TDSServer;13 DSTCPServerTransport1: TDSTCPServerTransport;14 DSServerClass1: TDSServerClass;15procedure DSServerClass1GetClass(DSServerClass: TDSServerClass;16var PersistentClass: TPersistentClass);17private18{Private declarations }19public20end;2122var23 ServerContainer1: TServerContainer1;2425implementation2627uses Windows, ServerMethodsUnit1;2829{$R *.dfm}3031procedure TServerContainer1.DSServerClass1GetClass(32 DSServerClass: TDSServerClass; var PersistentClass: TPersistentClass);33begin34 PersistentClass := ServerMethodsUnit1.TServerMethods1;35end;3637end.我们在本文章中,并不做深入的介绍,因为如果要把相关的介绍完,估计已经是一本书的一个大章节了,而且对一些细节我并不了解,误导了朋友们不是好事,同时再次提醒各位,看我的文章请别以完全相信的心态去看,因为我说的,并不一定正确把form1的标题改为你想要的标题:如datasnap SERVER,然后再加上其它界面上显示的,比如我现在加一个lable,内容写上:datasnap 服务器端已运行,并调字号到适当的大小先把我们的程序做个简单的保存吧,由于是DEMO,我也力求简单,所以数据库也放在同一目录,且设置成固定的参数其它也默认,工程名称就叫做datasnapdemo1SRV吧选用什么数据库好呢,对于工作在非MS 平台上的人,很多都排斥M S的产品,不过我总是认为,MS的东西做的很好的,他不一定很强大,但是应该很易用,今天的数据库及连接组件,我们也不选DBX及其它的数据库,DBX+FB可以绿色,但是估计会FB的朋友数量并不是很多,我们就用简单的ACCES+ADO 吧现在我们就用ACESS 来建一个库,DB.mdb 然后生成一个表名为TEST,有两列,分别为id 数字,Vname 文本,ID为主键并且输入一列值 1 周黔在ServerMethods1 上面放上ADO相关的控件,并连接到ACCESSADOConnection1loginprompt为:falseconnectionstring为:(注:下面是自动生成的连接串,你也自动生成一个吧,应该会看我文章的所有人都会这个操作的)ProviderProvider=Microsoft.Jet.OLEDB.4.0;User ID=Admin;Data Source=db.mdb;Mode=Share Deny None;Jet OLEDB:System database="";Jet OLEDB:Registry Path="";Jet OLEDB:Database Password="";Jet OLEDB:Engine Type=5;Jet OLEDB:Database Locking Mode=1;Jet OLEDB:Global Partial Bulk Ops=2;Jet OLEDB:Global Bulk Transactions=1;Jet OLEDB:New Database Password="";Jet OLEDB:Create System Database=False;Jet OLEDB:EncryptDatabase=False;Jet OLEDB:Don't Copy Locale on Compact=False;Jet OLEDB:Compact Without ReplicaRepair=False;Jet OLEDB:SFP=False;connected为trueADOTable1connection为ADOConnection1tablename为:testactive为:trueDataSetProvider1dataset为:ADOTable1设置完成了,现在我们记下DSTCPServerTransport1的prot值ServerMethodsUnit1中的: TServerMethods1 = class(TDSServerModule) ,如果TServerMethods1给你改成了其它的代码了,则需要记住对应的代码以上两个值一会儿在客户端要用到编译并独立于IDE运行服务器端吧运行后如图:保持服务器端不要关闭,让我们开始客户端的编程吧file->new-> vcl for the application 打开一个应用程序把FROM的标题改成:datasnap client放上一个SQLConnection1loginprompt为:false把derver 改成:Datasnap 然后点derver前的+号hostname 输入127.0.0.1prot 设置与服务器的相同,默认为211(刚刚服务器上要求记住的)放上一个DSProviderConnection1sqlconnection为:SQLConnection1serverclassname 为: tServerMethods1(刚刚服务器上要求记住的)把SQLConnection1的connected 设置为true放上一个ClientDataSet1RemoteServer设置为:DSProviderConnection1providername 设置为:DataSetProvider1active设置为:true放上一个:DataSource1dataset设置为:ClientDataSet1放上一个:DBNavigator1DataSource设置为DataSource1放上一个DBGrid1DataSource设置为DataSource1现在保存客户端为datasanpdemo1client然后编译成EXE独立于IDE运行吧如图:我们的简单的三层终于完成了,你有写代码了吗?试试把你的程序COPY到U盘上,放到任意电脑上运行呢?提示少DLL文件?哪到本机上COPY过去吧,啥,你不是说服务器及客户机都只有一个EXE的吗,哪请你在USES 里面加上MidasLib 吧修改的数据关闭后不见了?我可没有说过我的三层程序是可以保存数据的,如果需要保存,请谷哥clientdataset 如何提交数据吧,就一条代码,很简单的是绿色的吧,要不你把客户机程序的IP改改,然后把服务器程序放到另一台电脑上运行,看下可以运行吗?想要源程序鸦用:请去QQ群67803772的共享中下载吧,本站我现在还不懂上传rar文件文件名是:datasnapdemo不要一行代码就能三层.zip。
DTPSforG2操作顺序概要

DTPS for GII 操作顺序1、建立Installation link (设备链接) ● 启动DTPS 程序。
● 单击菜单栏“File ”,选择下拉菜单“Add Control ”的子菜单“Installation link ”。
● 在弹出的对话框中,Installation Link Name 框中输入您所要建立的Link 的名称;Link 框中输入要保存数据的位置;并将New 选中。
单击“OK ”后就建立了新的Link 。
√2、建立Installation。
●单击Installation左侧的,显示下一级文件夹。
右键单击刚才建立的Installation link(例:DTPSDATA),选中Property,出现Property对话框。
●单击“Add Installation”按钮,●在弹出的对话框中输入Installation名称,并选择要使用的机器人台数,单击“OK”。
●出现“It creates installation. Are you sure?”后,单击“是”。
这样,在刚才的Installation Link中就新建了一个Installation。
(例:PWST-TEST)3、添加Group和Object,并给新的文件重命名。
●在左侧窗口中单击已经建立的Installation(PWST-TEST)后,在右侧出现3个窗口,左上角是Group窗口,右上角是Object窗口。
在这两个窗口中单击New,可新建Group和Object。
单击Rename可将建立的Group 和Object重命名。
4、设定机器人参数。
●右键单击建立的Installation(PWST-TEST),选择Property,单击Installation Editor。
出现下面的编辑窗口。
●单击菜单栏的Robot,从下拉菜单中选择Property。
或者双击左侧窗格中的R001-ROBOT。
●出现Robot information窗口。
山西省公路GPS数据维护系统使用技巧
目录1. 如何分割路段 (2)A. 如何在图上的相应位置分割路段 (2)B. 如何根据已知的分割桩号分割路段 (3)2. 如何在程序中设置长短链 (4)A. 如何设置短链 (4)B. 如何设置长链 (4)3. 如何设置重复路段 (5)4. 如何在图上选中重复路段中的低等级路段 (7)5. 如何合并路段 (8)6. 如何设置交叉 (8)7. 如何快速的在地图上定位到需要修改的采集要素 (10)A.查找定位功能: (10)B.属性表定位功能: (10)8. 如何变更通达路线 (11)9. 如何修改指定路段或路线的编码及名称 (12)A. 如何修改指定路段的编码及名称 (12)B. 如何修改指定路线的编码及名称 (13)10. 如何根据已知的桩号范围批量修改路段及所属点状要素的桩号值; (14)11. 如何修改点状要素属性信息 (16)12. 如何根据已知的桩号增加点状要素 (16)13. 如何查看指定路线上的点状要素的信息 (17)14. 如何按照指定的指标项排列采集要素的属性信息 (18)15. 如何给指定的路段增加多媒体信息 (19)16. 如何给指定的点状要素增加多媒体信息 (20)17. 如何给整条路线增加多媒体信息 (21)18. 如何删除指定的路线 (21)19. 系统备份的数据的存放目录 (22)20. 如何还原指定的路线 (22)21. 如何引用公路库中相应路段的属性信息 (24)22. 如何引用公路库中相应点状要素的属性信息 (25)23. 如何校核相同路线相邻路段属性的连续性 (26)24. 如何校核路段飞点,跳点及不规则折点的问题 (26)25. 如何校核路段上的长直线的问题 (27)26. 如何批量捕捉指定范围内的不在路上的点状要素 (28)27. 如何导入《全国公路数据库系统》中的属性数据 (29)28. 如何给指定区划范围内的指定的行政等级的路线统一赋管养单位、路政管理单位基左中右绿化管理单位 (30)29. 如何批量删除指定管理单位的路线及线上的点状要素 (31)30. 如何批量计算车道、涵洞数、隧道类型 (31)31. 如何导出一条指定的路线 (32)32. 如何快速的重新排列点状要素的编码 (33)33. 如何修改路段序号 (33)34. 如何修知道路段长度 (34)35. 如何分离出指定管养单位的路线 (34)36. 如何分离出各区县的数据 (35)37. 如何分离出指定行政等级的路线 (36)方法一:各单位同时持有全部路线,然后直接删除不是本单位的路线 (36)方法二:先按条件导出数据,再导入数据。
三鼎 中文电子经纬仪操作手册DT系列
2.1.预防事项 .........................................................................................................................................1 2.2.部件名称 .........................................................................................................................................2 2.3.仪器开箱和存放 .............................................................................................................................2 2.4.电池的装卸、信息和充电 ...................................................
中海达静态传输及解算操作流程

中海达GPS静态数据传输及解算简易操作流程静态数据的传输:插好数据线,开机把接收机改为静态模式(若是静态机则开机即可),打开HDS2003数据处理软件点【工具】→【HitMon数据传输】——进入数据传输软件,点【连接】→【计算机通讯设置】——设置通讯串口及传输的波特率一般为115200点【连接】→【连接】或直接点工具栏上的连接快捷键(若用USB传输线则插上后直接点连接即可),连上后在对话框右下角显示仪器号,读取接收机数据后在主界面显示观测的数据,点【文件】→【设置卸载文件的存储目录】或直接点工具栏左侧的路径快捷键——设置接收机传出文件的存储目录,设置好后界面刷新一下,在对话框下方显示下载的路径,选择需要下载的文件右键→【输入测站信息】——输入点名、时段、仪器高等,确定后界面刷新一下把改后的数据在写入仪器内,(软件默认点名为四位若不够四位软件自动在点名后加“_”下划线补齐,若仪器高输错,第二次修改时需把点名后的“_”下划线删除,不然所改的数据不能传入到接收机里)刷新后在界面里就可以看到改后的文件的点名和仪器高了,右键→【数据导出】——把所测的数据导入到指定的文件夹里,导出后点【连接】→【断开】或直接点工具栏上的断开快捷键,就可拨下数据线进行下一台接收机的数据传输。
接收机的设置:点【查看】→【接收机信息】可查看接收机号、注册日期、内存等信息,点【工具】→【采样间隔、高度截止角设置】可更改采样间隔和高度截止角,点【工具】→【接收机注册】可输入21位注册码进行接收机的注册。
HDS2003数据处理软件的解算:运行HDS2003数据处理软件1新建项目点【项目(F)】→【新建(N)…】,弹出 新建项目目 属性设置 对话框,在 项目细节 里填写好各项信息,点 控制网等级——选择自己的控制网等级,点 坐标系统——选择已知点坐标系及输入测区的中央子午线,改好后2导入数据点【项目(F)】→【导入(I)…】,弹出 数据导入 对话框,数据格式选择第一个中海达ZHD观测数据弹出打开对话框选择需要解算的数据,点击打开弹出是否加载数据3基线处理点【静态基线(S)】→【处理全部基线(A)】,软件开始自动处理全部基线,处理完后弹出 是否查看基线报告 计算区 对话框里显示基线的精度,若有不合的则显示出不和基线的条数,在主界面的网图里,算合的基线显示为黑色,不合的基线显示为灰色。
拓普康GPS数据处理教程

拓普康GPS静态测量Pinnacle 软件培训教程目录第一章Pinnacle中文软件的安装 (3)第二章Pinnacle软件的操作流程 (3)1.1运行Pinnacle软件 (3)1.2 Pinnacle内业处理 (3)1.2.1工程项目管理 (3)1.2.2原始数据的输入 (5)1.2.3原始数据属性修改 (8)1.2.4基线处理 (13)1.2.5WGS84无约束平差 (22)1.2.6建立大地坐标系统(此过程仅需做一次) (25)1.2.7大地控制点的输入与匹配 (28)1.2.8大地坐标系统下的约束平差 (32)1.2.9定义地方坐标系统(此过程仅需做一次) (36)1.2.10地方控制点的输入与匹配 (37)1.2.11地方坐标系下的约束平差 (42)第一章Pinnacle中文软件的安装建议Pinnacle软件的安装步骤如下:1、安装Pinnacle软件的英文版2、调入大地水准模型文件(注:当地坐标系统可以不需要安装)3、安装Pinnacle软件中文版(注:安装的路径一定与英文版相同)4、安装软件的帮助文件(注:帮助软件仍是英文版,可以根据自己的情况选择是否安装,建议安装目录与英文版相同)第二章Pinnacle软件的简易流程1.1运行Pinnacle软件Pinnacle 软件安装完后,点击开始\程序\Topcon Positioning System\Pinnacle汉化版,运行Pinnacle 程序,也可双击桌面上的Pinnacle图标。
1.2Pinnacle内业处理1.2.1工程项目管理1)运行Pinnacle2345)点击工具条上的1.2.2原始数据的输入12)在出现的界面中,选择工具条上的3)在出现的界面中,选择数据下载的路径,如:示例\NO1,按ctrl+A可以全部选择。
点4)在出现的界面中,选择工具条上的5该对话框。
同样的方法将其他时段数据导入进来,本次将示例中的NO2的数据导入导数据库中。
DTPS操作顺序及其教程
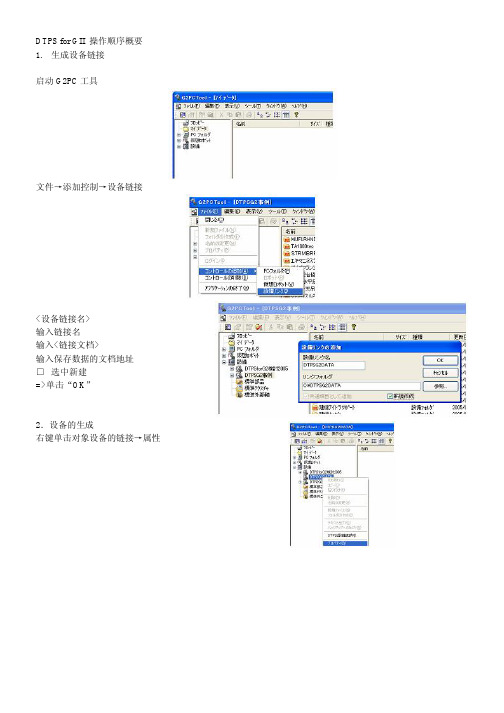
DTPS for GII 操作顺序概要1.生成设备链接启动G2PC工具文件→添加控制→设备链接<设备链接名>输入链接名输入<链接文档>输入保存数据的文档地址□选中新建=>单击“OK”2.设备的生成右键单击对象设备的链接→属性“添加设备”<设备名> 输入设备名称○指定新建<使用机器人台数>:1 => 单击“OK”生成设备。
→“是”2.更改、添加组或分类名(根据需要)双击设备名在各自缺省的内容中,单击“新建”,即可添加设备名;单击“变更”,即可修改设备名。
4. 设定机器人的参数右键单击设备名→属性→“编辑设备”机器人→属性机型、工具、外部轴、机构等设定这里以VR008为例5. 工件、设备部品的生成或读入“组”→“部品”→“新建”1) 单击图形按钮,生成要素(详见另外说明)2) 读取STL格式数据(详见另外说明)生成MESH(网状)选中读取的STL数据文件,并将其打开。
3) 读取IGES格式的数据(详见另外说明)文件→导入选择读取的IGES数据文件,并将其打开6. 生成外部轴(生成硬件)1) 生成双持回转倾斜变位机“组”→“外部轴”→“新建”I.指定基本图形(固定部分的图形)=指定相应部品=双击模块文件栏选择“标准”部品的Two Axes positioner (1) G-500 => “OK”II.添加外部轴①添加第一轴编辑→添加外部轴单击外部轴<01>指定轴的类型回转<V>指定正方向(+或-)指定外部轴坐标系的原点位置Z:540移动范围(指定最大、最小值)最小:-135 最大:135=指定第一轴所对应的图形部品=双击模块文件栏选择“标准”部品的Two Axes positioner (2) G-500 =>“OK”②添加外部轴的第二轴编辑→添加外部轴(外部轴<01>:选择状态)外部轴<02> 单击指定轴的类型回转<W>转动范围(指定最大、最小值)最小:-3600 最大:3600=指定第二轴相应的图形部品=双击模型文件栏选择“标准”部品的PANADICE G-500-TABLE =>“OK”=指定图形的配置=模型位置<Z>:210,模型位置<V>:-90III.保存外部轴文件→保存输入文件名=>“OK”完成变位机的生成文件→结束程序2) 生成平移装置“组”→“外部轴”→“新建”I.指定基础图形(固定部分的图形)双击模块文件栏选择Shift Base => “OK”II.添加外部轴=添加第一轴(移动轴)=编辑→添加外部轴单击外部轴<01>选择轴的类型移动<Y>移动范围(指定最大、最小值)最小:0 最大:2000指定移动轴相应的图形部品(双击模块文件栏)选择Shift Table =>“OK”III.保存外部轴文件→保存输入文件名=> “OK”完成平移装置文件→结束程序7.机器人外部轴的设定(软件的设定)双持回转倾斜变位机+平移装置的3个轴时的设定右键单击设备名→属性“编辑设备”机器人→属性(或双击R001-ROBOT)“外部轴”实际应用时,请根据实际的轴号来进行设定,这里暂且从No.1开始设定。
海地软件使用方法大全
海地软件地面线文件采集的地面点文件是*.TXT的(若是*.csv则不用导入excel),先打开excel,采用“数据--导入外部数据--导入数据”打开“选取数据源”对话框,按照楼主地面点文件保存路径找到地面点文件双击打开,在“文本导入向导”中选择“分隔符号”,点“下一步”,选择“空格”,将采集的xyz坐标导入excel。
在excel 中,若导入后A列为X值,B列为Y值,C列为Z值,则在D列第1行输入公式“=A1&","&B1&","&C1”回车,D1中显示第一个点“X坐标,Y坐标,高程”,选中D1右下角向下拖动公式,直到采集的数据全部在D列中显示。
选中D列中的所有数据,右键“复制”,在CAD中新建图层,设置为当前图层。
选中输入点命令,在cad下方对话框中“指定点:”后,右键“粘贴”,则所有采集的地面点输入CAD内。
用海地“DTM-电子地形图数字化”打开“地形图数字化”对话框,在“选择高程数据层”中选择所输入点所在的图层,点“确定”,生成*.xyz文件,“DTM—构造DTM”,“DTM—生成DTM”,生成*.tin文件,“纵断面—由DTM切纵横断面”,打开“由DTM切纵横断面”对话框,根据现场采集宽度采用“直接输入”方式,输入左右边距(若输入宽度超过DTM的范围则无法提取),设置切值方式、切值范围、地面线文件格式,设置输出文件的名称及保存路径(注意不要覆盖了实测的dmg文件),点确定则生成了*.dmg、*.dmx文件,若采集的数据中无路线中桩位置坐标、高程,为了提取的地面线的准确,应按上述方法将中桩点(XYZ)输入CAD中再生成DTM,提取*.dmx文件。
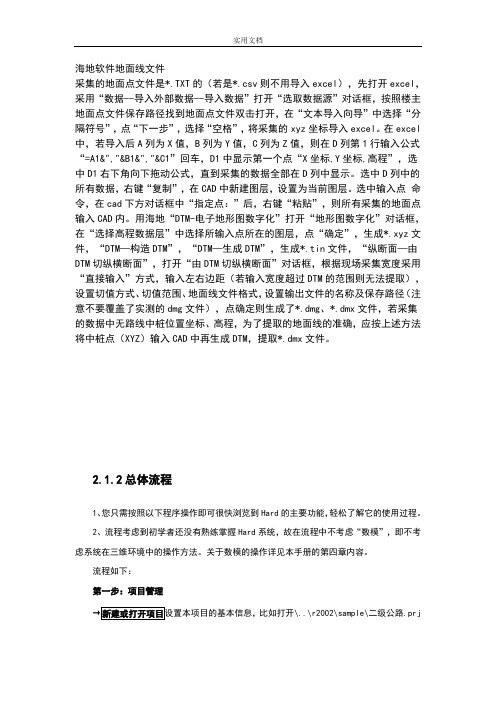
2.1.2总体流程1、您只需按照以下程序操作即可很快浏览到Hard的主要功能,轻松了解它的使用过程。
2、流程考虑到初学者还没有熟练掌握Hard系统,故在流程中不考虑“数模”,即不考虑系统在三维环境中的操作方法。
impper作业指导航测
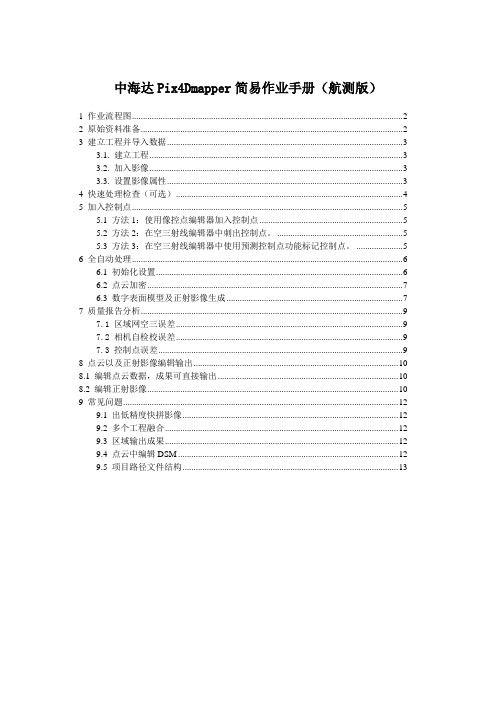
中海达Pix4Dmapper简易作业手册(航测版)1 作业流程图 (2)2 原始资料准备 (2)3 建立工程并导入数据 (3)3.1. 建立工程 (3)3.2. 加入影像 (3)3.3. 设置影像属性 (3)4 快速处理检查(可选) (4)5 加入控制点 (5)5.1 方法1:使用像控点编辑器加入控制点 (5)5.2 方法2:在空三射线编辑器中刺出控制点。
(5)5.3 方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(5)6 全自动处理 (6)6.1 初始化设置 (6)6.2 点云加密 (7)6.3 数字表面模型及正射影像生成 (7)7 质量报告分析 (9)7.1 区域网空三误差 (9)7.2 相机自检校误差 (9)7.3 控制点误差 (9)8 点云以及正射影像编辑输出 (10)8.1 编辑点云数据,成果可直接输出 (10)8.2 编辑正射影像 (10)9 常见问题 (12)9.1 出低精度快拼影像 (12)9.2 多个工程融合 (12)9.3 区域输出成果 (12)9.4 点云中编辑DSM (12)9.5 项目路径文件结构 (13)1 作业流程图2 原始资料准备原始资料包括影像数据、POS 数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS 数据文件,主要检查航带变化处的相片号,防止POS 数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS 数据一般格式如下图,从左往右依次是相片号、 经度、 维度 高度 航向倾角 旁向倾角 相片旋角注意:Pix4Dmapper 软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT 或者CSV 。
获取原始资料 建立测区 导入数据全自动处理 结果分析3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
DTP药店全流程筛查评定细则
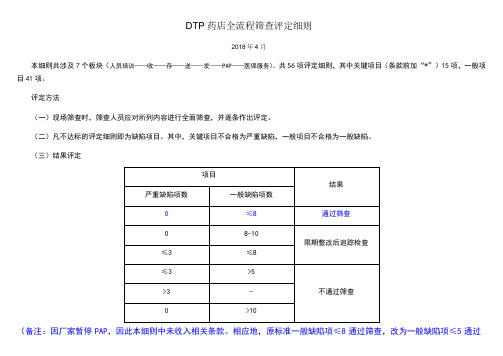
DTP药店全流程筛查评定细则
2018年4月
本细则共涉及7个板块(人员培训——收——存——送——发——PAP——医保服务)。
共56项评定细则,其中关键项目(条款前加“*”)15项,一般项目41项。
评定方法
(一)现场筛查时,筛查人员应对所列内容进行全面筛查,并逐条作出评定。
(二)凡不达标的评定细则即为缺陷项目。
其中,关键项目不合格为严重缺陷,一般项目不合格为一般缺陷。
(三)结果评定
(备注:因厂家暂停PAP,因此本细则中未收入相关条款。
相应地,原标准一般缺陷项≤8通过筛查,改为一般缺陷项≤5通过
筛查)
第一部分人员及培训(共5条:其中带*号的0条,不带*号的5条)
第二部分冷链药品收货及验收(共5条:其中带*号的1条,不带*号的4条)
第三部分冷链储存(共16条:其中带*号的3条,不带*号的13条)
第四部分配送(共15条:其中带*号的6条,不带*号的9条)
第五部分发药(共11条:其中带*号的3条,不带*号的9条)
第六部分 PAP 【当前(2018年4月)厂家已暂停PAP,因此本细则中无第六部分的条款。
】第七部分第七部分医保服务(共2条:其中带*号的1条,不带*号的1条)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DTPS for GII 操作顺序概要1.生成设备链接启动G2PC工具文件→添加控制→设备链接<设备链接名>输入链接名输入<链接文档>输入保存数据的文档地址□选中新建=>单击“OK”2.设备的生成右键单击对象设备的链接→属性“添加设备”<设备名> 输入设备名称○指定新建<使用机器人台数>:1 => 单击“OK”生成设备。
→“是”2.更改、添加组或分类名(根据需要)双击设备名在各自缺省的内容中,单击“新建”,即可添加设备名;单击“变更”,即可修改设备名。
4. 设定机器人的参数右键单击设备名→属性→“编辑设备”机器人→属性机型、工具、外部轴、机构等设定这里以VR008为例5. 工件、设备部品的生成或读入“组”→“部品”→“新建”1) 单击图形按钮,生成要素(详见另外说明)2) 读取STL格式数据(详见另外说明)生成MESH(网状)选中读取的STL数据文件,并将其打开。
3) 读取IGES格式的数据(详见另外说明)文件→导入选择读取的IGES数据文件,并将其打开6. 生成外部轴(生成硬件)1) 生成双持回转倾斜变位机“组”→“外部轴”→“新建”I.指定基本图形(固定部分的图形)=指定相应部品=双击模块文件栏选择“标准”部品的Two Axes positioner (1) G-500 => “OK”II.添加外部轴①添加第一轴编辑→添加外部轴单击外部轴<01>指定轴的类型回转<V>指定正方向(+或-)指定外部轴坐标系的原点位置Z:540移动范围(指定最大、最小值)最小:-135 最大:135=指定第一轴所对应的图形部品=双击模块文件栏选择“标准”部品的Two Axes positioner (2) G-500 =>“OK”②添加外部轴的第二轴编辑→添加外部轴(外部轴<01>:选择状态)外部轴<02> 单击指定轴的类型回转<W>转动范围(指定最大、最小值)最小:-3600 最大:3600=指定第二轴相应的图形部品=双击模型文件栏选择“标准”部品的PANADICE G-500-TABLE =>“OK”=指定图形的配置=模型位置<Z>:210,模型位置<V>:-90III.保存外部轴文件→保存输入文件名=>“OK”完成变位机的生成文件→结束程序2) 生成平移装置“组”→“外部轴”→“新建”I.指定基础图形(固定部分的图形)双击模块文件栏选择Shift Base => “OK”II.添加外部轴=添加第一轴(移动轴)=编辑→添加外部轴单击外部轴<01>选择轴的类型移动<Y>移动范围(指定最大、最小值)最小:0 最大:2000指定移动轴相应的图形部品(双击模块文件栏)选择Shift Table =>“OK”III.保存外部轴文件→保存输入文件名=> “OK”完成平移装置文件→结束程序7.机器人外部轴的设定(软件的设定)双持回转倾斜变位机+平移装置的3个轴时的设定右键单击设备名→属性“编辑设备”机器人→属性(或双击R001-ROBOT)“外部轴”实际应用时,请根据实际的轴号来进行设定,这里暂且从No.1开始设定。
No.1的类型:将未使用更改成回转伺服参数选择2KW用伺服参数完成No.1轴的参数设定No.2的类型:将未使用更改成回转伺服参数选择1KW用伺服参数完成No.2轴的参数设定No.3的类型:将未使用更改成平移按照实际情况设定伺服参数和减速比(这里暂时设定为750W用的伺服参数,减速比分子设定为1,分母设定为5)设定动作范围的上下限上限:2000,下限:0完成No.3轴的参数设定单击“OK”,保存上述设定,完成设备编辑8. 外部轴的配置右键单击设备名→属性“编辑设备”1) 变位机的配置编辑→添加外部轴模型在“组”中,选择已经生成的双持回转倾斜变位机=> “OK”单击“外部轴”后,单击外部轴名称在“配置”中输入尺寸X:12002) 平移装置的配置编辑→添加外部轴模型在“组”中,选择已经生成的平移装置=> “OK”9.外部轴的配置·链接(硬件和软件的连接)=第一轴的连接=“机器人”“外部轴”→单击轴No.的□01栏按住Ctrl键,单击第一轴的运转部位=第二轴的连接=“机器人”“外部轴”→单击轴No.的□02栏按住Ctrl键,单击第二轴的运转部位(转台面)=第三轴的连接=“机器人”“外部轴”→单击轴No.的□03栏按住Ctrl键,单击第三轴的运转部位(运转台架)10.机器人的配置在属性栏内,显示出“配置”及链接栏将轴No. 03的连接栏从“无”更改为“机器人”在“机器人”“配置”中输入机器人的位置尺寸Z:99011.机构的设定机器人→属性(或双击R001-ROBOT)“机构”将标签Mech1的G1、G2、G3的数据栏全部标记为“使用”。
12.工件向量的设定根据实际使用的焊枪设定好工具向量值此处暂时将TOOL1的向量作为标准值使用(L1:505、L2:0、L3:350、TW:0)13.焊枪图形的设定“机器人”“工具”中双击工具No.1栏选择“标准”的Torch 350A standard => “OK”选择的焊枪将被安装到手腕轴上14.外部轴协调的设定机器人→可选协调□外部轴设定单击“OK”进行设定完成设备的设定15.程序的生成单击设备名“机器人1”“程序”=> “新建”根据需要指定工具编号、机构编号=>“OK”1)工件的配置显示→工件=指定工件=双击工件设定窗口中的文件栏=指定核实的部件=单击“组”,选择已生成的部件的名称单击“OK”,完成部件的选择=指定配置对象=将配置对象栏指定为G2=指定配置位置的坐标值=Z:输入250单击“OK”,完成工件配置2)生成原点位置编辑→原点位置显示原点位置列表后,单击“新建”输入登录名选择要修改的项,单击“更改值”将需要修改的值全部输入此处暂时修改为UA:-30、FA:-30,BW:-90单击“OK”,完成登录3)点的追加①生成点1(待机姿态)TOOL=1:右键单击TOOL01一行添加姿态和移动命令如要将前项设定的点设为原点位置,则右键单击“HOME”,选择您已登录的名称。
此处暂时选择:HOME1机器人的姿态将成为设定的原点位置的姿态单击“OK”,生成P1点②生成焊接开始点右键单击点P1添加姿态和移动命令单击姿态和移动命令窗口中的“更改”插补形态:MOVEL 空走点==> 焊接点示教速度:0.6单击“OK”命令完成更改=将焊枪移动到焊接开始点=按住Ctrl键并单击开始点位置保持焊枪姿态不变,将焊枪移动到单击的点的位置=焊枪指向的调整=将窗口分割,从俯视角度确认焊枪指向在“直角”模式下使用Z回转转动焊枪移动量设为“10”,单击十次左箭头键(100°)单击“OK”,生成焊接开始点③追加接近点右键单击点P2追加姿态和移动命令由于要在焊接点之前追加该点,所以请在追加姿态和移动命令窗口内将选中的“□在后追加”删除在“工具”模式下,按照X方向,离开焊接开始点50mm移动量设为“10”,单击5次左箭头键单击追加姿态和移动命令窗口的“更改”焊接点==> 空走点示教速度:10单击“OK”,完成更改再单击“OK”后,将会在焊接开始点之前添加一个点P3④生成焊接结束点右键单击焊接开始点(P2)添加姿态和移动命令由于是在焊接开始点之后追加的点,所以请选中“□在后追加”单击追加姿态和移动命令窗口的“更改”焊接点==> 空走点示教速度:60单击“OK”,完成修改移动命令按住Ctrl键单击结束点位置焊枪保持在焊接开始点的姿态移动到选择的点单击“OK”,生成焊接结束点重复以上操作,即可生成各种程序4)生成程序时,需特别指出的一些事项①进行圆弧或摆动动作时,请在移动命令变更窗口中指定插补形态。
②外部轴的移动在追加姿态和移动命令窗口中选择“外部轴”根据移动量及单击位置,可调整方向及移动量A:每单击一次按照指定的移动量移动B:每单击一次按照指定移动量的10倍移动或者,还可以通过在外部轴栏中直接输入数值来进行移动但是,外部轴移动时,关于工具的固定,有3种模式可以进行动作(1) □ 工具固定 不选中机器人的姿态固定,只移动外部轴(2) □ 工具固定 选中 □ 绝对 不选中机器人的工具的方向相对于工件固定,机器人一边改变姿态,一边移动外部轴(3) □ 工具固定 □ 绝对 两个都选中 机器人的工具相对于绝对坐标系姿态固定。
尖端固定到工件上,外部轴移动。
√ √ √③修改以前生成的点双击想要修改的点或右键单击后选择“修改”在移动命令变更窗口中修改必要的项目。
要修改机器人和外部轴时,单击“机器人操作”。
16.程序的演示1)每个点演示运行→演示根据需要,指定点之间的显示分割数用“演示”来进行每点之间的演示2) 连续演示多个点选择想要演示的点。