步进BJ
步进电机:35BYJ46规格书

ELECTRIC PERFORMANCE & PROPERTIES:
1.1、相数:
4相。
Number of phase:
4 phase.
1.2、驱动方式:
1-2相励磁单极驱动。
Drive mode:
1-2 phase excitation unipolar drive.
1.3、步距角:
7.5°/85(输出轴),减速比1/85。
约70克。
Weight:
Product shall weight about 70g.
2.4、噪音:
雷利电器LEILI
3
40dB以下,12V DC,100pps,无负载,距电机10cm处测得。 Noise level:
Noise level of motor shall be less than 40dB energized with 12V DC and 100pps in no load condition measured 10 centimeters from motor. 2.5、输出轴机械强度: •受垂直轴向载荷(输出轴前端):
1.9、绝缘电阻:
在常温状态下,接线与机壳间 DC 500V,10MΩ以上,
雷利电器LEILI
2
在湿热试验后,接线与机壳间 DC 500V,10MΩ以上。
Insulation resistance:
Insulation resistance between motor connector pin and dead metal parts
3.4、环境试验: Environmental test: 环境试验后的性能须满足1.8~1.10,2.1,2.4~2.7。 Motor shall satisfy requirements in 1.8~1.10,2.1,2.4~2.7 after environmental test. 3.4.1、高温、高湿试验: 85℃,95%RH中放置100h,取出在常温中放置30min后进行测试。 High temperature & high humidity test: Motor stored in ambient condition of 85℃,95% relative humidity for 100 hours then picked out and stored in normal ambient condition for 30 minutes.
步进电机24BYJ-48(5V)资料
红5 黄3 蓝1
连线 序号 5 4 3 2 1
导线 颜色 1 2 红 + + 橙 黄 粉红 蓝 - -
分配顺序
3 4 5 6 7 8 + + + + + + - - - - - -
从输出轴方向看
顺时针方向 (反相)
BJ/24W-002
底 图 总 号
步进电机
版本状态 第0版
签 名ห้องสมุดไป่ตู้期 期 期 期 日期 图 艺 核 准 日 日 日 日
文件号 K3编码
签
字 标记 处数 修改文件号
日
制 工 期 审 批
图样标记
数量 重量 比例
外形图
共
页
第
页
客户编码
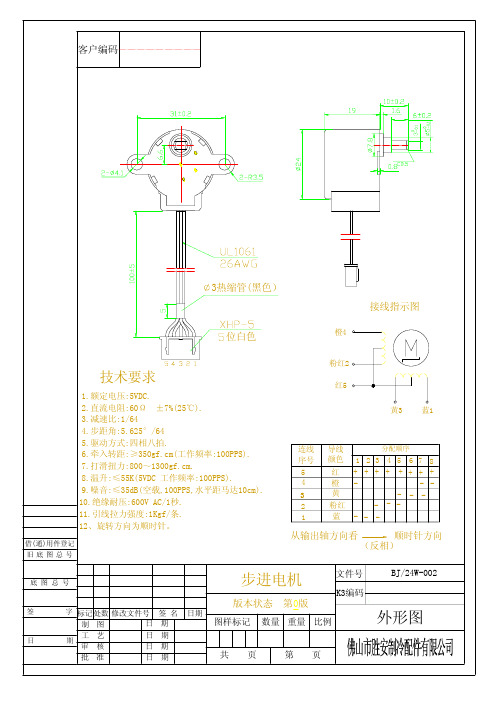
3热缩管(黑色) 接线指示图 位白色
橙4
粉红2
技术要求
1.额定电压:5VDC. 2.直流电阻:60Ω ±7%(25℃). 3.减速比:1/64 4.步距角:5.625°/64 5.驱动方式:四相八拍. 6.牵入转距:≥350gf.cm(工作频率:100PPS). 7.打滑扭力:800~1300gf.cm. 8.温升:≤55K(5VDC 工作频率:100PPS). 9.噪音:≤35dB(空载,100PPS,水平距马达10cm). 10.绝缘耐压:600V AC/1秒. 11.引线拉力强度:1Kgf/条. 12、旋转方向为顺时针。
北京时代超群 ZD-6209-V2 高性能步进驱动器 说明书
使用说明书ZD-6209-V2高性能步进驱动器●在使用本品前,请仔细阅读本使用说明书●请妥善保管本说明书,以备日后参考●本册外观图片仅供参考,请以实物为准北京时代超群ZD-6209-V2目录特点和功能 (2)工作条件和参数 (2)接口定义 (3)接线方法 (4)共阳接法 (4)共阴接法 (5)接线实例 (6)适用电机类型 (7)细分设置 (8)电流设置 (8)衰减设置 (8)外形尺寸 (9)常见问题解答 (10)安全注意事项●本驱动器为直流电源供电,请确认电源正负极正确后上电●请勿带电插拔连接线缆●电机运行中如需改变方向或停止,必须先减速,避免急停急转,否则可能会损坏驱动器●驱动器非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿●驱动器为功率设备,尽量保持工作环境的散热通风产品特点接口定义Array●高集成度高可靠性●接口采用超高速光耦隔离●抗高频干扰能力强●最高输入电压:DC 40V(峰值)●电源反接保护主要功能●整步、半步、四细分、八细分、十六细分可调●输出电流线性可调●过热自动保护●自动半流锁定●衰减4档可调●支持脱机、使能、锁定等功能工作条件项目最小额定最大单位环境温度-30 80 ℃输入电压(DC) 8 24 32 V输入频率0 16000 Hz输出电流0.3 1.5 AH 4.5 5 5.5 V接口电压L 0 0 0.5 V接线方法共阳极接法(公共正方式)R为串联限压电阻,当控制器的接口电压为5V时,无需R,直连既可; 当接口电压为12V时,请串联1K电阻; 当接口电压为24V时,请串联2.7K电阻(后同)。
控制方式脉冲- 有脉冲时工作,高电平有效;无脉冲时锁定电机并自动半流方向- 高电平输入或悬空时正转;低电平输入时反转脱机- 高电平输入或者悬空时正常工作;低电平时脱机共阴极接法(公共地方式)控制方式脉冲+ 有脉冲时工作,低电平有效;无脉冲时锁定电机并自动半流方向+ 低电平输入或悬空时正转;高电平输入时反转脱机+ 低电平输入或者悬空时正常工作;高电平时脱机接线实例1.与MC-10经济型控制器的连接方法2.与DY-I型智能单轴控制器的连接方法适用电机类型细分设置细分 SW3 SW4SW5 1 OFF ON OFF 2 OFF OFF ON 4 ON OFF ON 8 OFF ON ON 16ON ON ON电流设置此驱动器内置电流调节旋钮。
L298N驱动模块详细资料
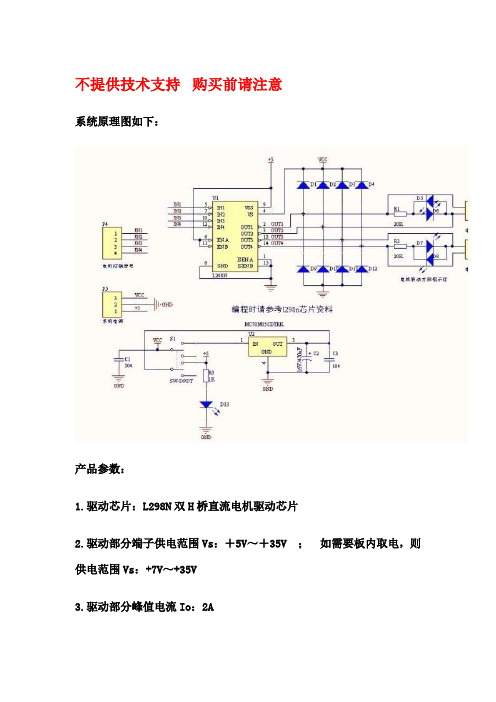
不提供技术支持购买前请注意
系统原理图如下:
产品参数:
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V
3.驱动部分峰值电流Io:2A
4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围:
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围:
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8.最大功耗:20W(温度T=75℃时)
9.存储温度:-25℃~+130℃
10.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度)
11.驱动板重量:33g
12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
使用说明:
步进电机的驱动:板上的ENA与ENB为高电平时有效,这里的电平指的是TTL电平。
ENA为A1和A2的使能端,ENB为B1和IB2的使能端。
BJ接步进电机公共端。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示有电流通过,为0表示没有电流流过。
线圈连线图如下图所示(以四相步进电机为例)。
小尺寸步进电机介绍

现代产品设计的一个方向是越做越小,产品要做得小,配套的步进电机尺寸也就必须小,那么小尺寸的步进电机有哪些尺寸可以选用的呢?下面小编给您整理相关信息,希望对于您的选型有帮助。
步进电机按照转子结构不同分成永磁式、反应式、混合式步进电机,反应式步进电机的噪声大,快在市面上绝迹了,特别的小尺寸反应式步进电机是没有的,所以不用考虑。
由于产品结构的不同,永磁式步进电机更容易做成小尺寸的,目前市面上最小尺寸的永磁式步进电机的外径4mm,主要是手机照相调焦用的,尺寸大一点的还有外径6/8/10mm等,这种小尺寸绝大多数都是调焦使用的。
这种小尺寸永磁式步进电机一般批量都很大,单价并不贵。
永磁式步进电机轴承通常是含有轴承,轴径细,机身通常是圆形,法兰是冲压钢板,安装孔在法兰上的两个耳朵上,两个耳朵和引线出线的地方是凸出的位置,下面是φ10永磁式步进电机的外形图。
这种φ10和以下小尺寸的永磁式步进电机的扭矩也是很小的,不到1mNm,往往需要配套减速箱。
永磁式步进电机的步距角比较大,也就是分辨率不高,例如15°或者18°的比较多见。
外径大于10mm的永磁式步进电机常见的有15和20外径的,结构和上述φ10的差不多,φ20的永磁式步进电机有些法兰不带耳朵,而是在法兰面上钻螺孔,下面是一款20永磁式步进电机外形图。
如果说这种小尺寸的永磁式步进电机可能1~2美金可以批量买到的话,小尺寸混合式步进电机就贵多了。
有些厂家最便宜的混合式是42步进电机,有些厂家最便宜的是35步进电机,之后越小尺寸的单价越贵。
混合式步进电机通常是滚珠轴承的,轴径比较粗,机身通常是方形,电机机身是铁芯,两端是端盖,通常是铝质端盖。
混合式步进电机的步距角小,也就是分辨率高,最常用的步距角是1.8°,小尺寸的混合式步进电机很难做成更小步距角的了。
虽然有传言有法兰尺寸12mm的混合式步进电机,但目前市面上最小的混合式步进电机的法兰尺寸是14mm,并且目前生产厂家极少,单价也很贵,外形图和距频图参考下图。
东方电机HP-P017-2二相步进电机CMK系列 RBK系列编码器操作手册说明书
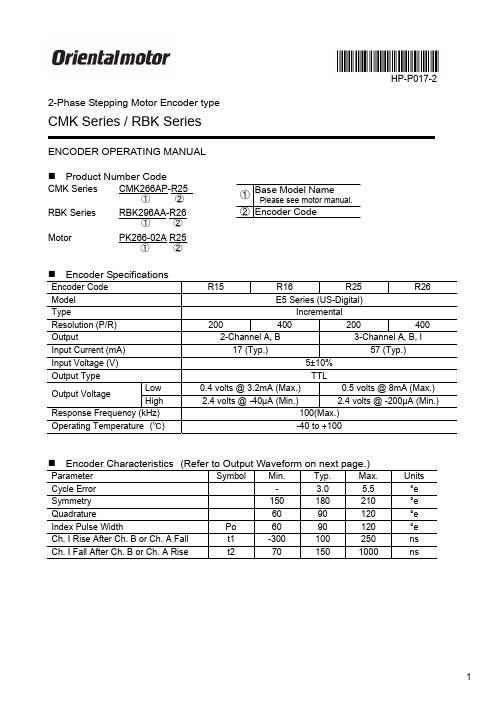
OrientalmotorHP-P017-22-Phase Stepping Motor Encoder typeCMK Series / RBK SeriesENCODER OPERATING MANUALProduct Number Code ArrayCMK Series CMK266AP-R25①②RBK Series RBK296AA-R26①②Motor PK266-02A R25①②Encoder SpecificationsCode R15 R16 R25 R26EncoderModel E5 Series (US-Digital)Type Incremental Resolution (P/R) 200 400 200 400Output 2-Channel A, B 3-Channel A, B, IInput Current (mA) 17 (Typ.) 57 (Typ.)Input Voltage (V) 5±10%Output Type TTLLow 0.5 volts @ 8mA (Max.)Output VoltageHigh 2.4 volts @ -40μA (Min.) 2.4 volts @ -200μA (Min.)Response Frequency (kHz) 100(Max.)Operating Temperature(℃) -40 to +100Encoder Characteristics(Refer to Output Waveform on next page.)UnitsMax.Parameter SymbolTyp.Min.Cycle Error - 3.0 5.5 °eSymmetry 150 180 210 °eQuadrature 60 90 120 °eIndex Pulse Width Po 60 90 120 °eCh. I Rise After Ch. B or Ch. A Fall t1 -300 100 250 nsCh. I Fall After Ch. B or Ch. A Rise t2 70 150 1000 nsOutput WaveformCPR (N): The number of Cycles Per Revolution.One Shaft Rotation: 360 mechanical degrees, N cycles.One Electrical Degree ( °e): 1/360th of one cycle.One Cycle (C): 360 electrical degrees ( °e). Each cycle can be decoded into 1 or 4 codes, referred to as X1 or X4 resolution multiplication.Symmetry: A measure of the relationship between (X) and (Y) in electrical degrees, nominally 180°e.Quadrature (Z): The phase lag or lead between channels A and B in electrical degrees, nominally 90°e.Index (CH I.): The index output goes high once per revolution, coincident with the low states of channels A and B, nominally 1/4 of one cycle (90°e).Position Error: The difference between the actual shaft position and the position indicated by the encoder cycle count. Cycle Error: An indication of cycle uniformity. The difference between an observed shaft angle which gives rise to one electrical cycle, and the nominal angular increment of 1/N of a revolution.Pin-outsEncoder Code Pin Lead Color R15, R16 R25, R261 Brown GND2 PurpleN.C. Index Channel 3 Blue A Channel4 Orange +5VDC power5 Yellow B ChannelEncoder Lead Wire for without Index (R15, R16)Housing: 50-57-9450 (Molex)Terminal: 16-02-0104 (Molex)Lead: UL Style 3265, AWG 24 Length: 600mm (24 in.)Encoder Lead Wire for with Index (R25, R26)Housing: 50-57-9450 (Molex)Terminal: 16-02-0104 (Molex) Lead: UL Style 3265, AWG 24 Length: 600mm (24 in.)。
CPU“步进”介绍

CPU“步进”介绍文章编号:C1321552007-11-16 17:37:58问题描述CPU“步进”介绍总结“步进”的英文是Stepping,Intel的官方文档中将其表述为“Core Stepping,核心步进”。
步进表示的含义是芯片因某种外在因素的变化而导致的物理或者电气特性的变化的产物。
以Intel的处理器为例(下文都以Intel的处理器为例),Stepping的具体值是2-3位由数字和字母组成的字符串。
现在常见的Intel处理器的步进值都是由“一位字母+一位数字”组成的:处理器的步进升级是属于升级中“最细微”形式。
较之制程的升级,步进升级对周边硬件的要求是最低的。
比如,90nm制程的处理器升级到65nm制程,刷新主板BIOS是必须的。
但类似“A0到B0”的步进升级可以直接完成,无需任何额外的动作。
一、步进检测的两种法CPU-Z软件识别那么如何查到一款处理器的步进值呢?最简单的方法是使用CPU-Z这款软件直接读取读取(可以在上下载到最新版的CPU-Z):下载CPU-Z之后,将压缩包解压,直接双击CPU-Z.exe这个文件,稍等几秒钟之后,CPU-Z就会显示读取的处理器相关信息,其中就包括步进。
S-Spec号识别法:火眼金睛还有一种方法就是检验处理器表面的S-Spec,它的准确率也是100%。
上述这张图是一颗Core 2处理器表面的文字,第三行中,第二个字段“SL9SA”就是S-Spec号。
由于S-Spec号都是以“SL”开头,也被称作SL号。
SL号是识别处理器的重要依据,每一个SL号只对应某一特定频率,缓存,外频和步进的处理器。
所以S-Spec号对处理器的分类是最精细的。
处理器的任何一个参数发生变化都会引起SL号的变化。
比如,都是E6300处理器,也会因为步进的不同而有不同的S-Spec 号,但S-Spec与步进的对应关系需要在Intel的网站上才能查到。
二、步进升级成因与成效我们看着CPU的步进一次次的改变,那么背后的变化又是什么呢?任何一款产品,从投产到最终产品寿命的终了,其制造工艺都是遵循着日益成熟的路径来走的。
BYJ 步进电机使用手册

4
0
1
1
0
3 ASM 驱动程序:
;*** ****步进电机的驱动******** ;FOSC = 12MHz ;--------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 5.625 度 . 一圈 360 度 , 需要 64 个脉冲完成!!! ;--------------------------------------------------------------------------------; A 组线圈对应 P0.0 ; B 组线圈对应 P0.1 ; C 组线圈对应 P0.2 ; D 组线圈对应 P0.3 ; 正转次序: AB 组--BC 组--CD 组--DA 组 (即一个脉冲,正转 5.625 度) ;----------------------------------------------------------------------------------
二、配套的原理图及程序: 1、如果不考虑数据锁存功能,步进电机的扩展板电路可以简化为下图:
2、黑金刚套件采用的是 5V 步进电机,该步进电机的耗电流为 200ma 左右, 采用 uln2003 驱动,驱动端口为 P0.0(A),P0.1(B),P0.2(C),P0.3(C)。正转次序: AB 组--BC 组--CD 组--DA 组 (即一个脉冲,正转 5.625 度);反转次序:AB 组--AD 组--CD 组--CB 组 (即一个脉冲,正转 5.625 度),如下表:
MOV R3,#128
常用的信浓减速步进电机型号

很多公司在大量生产电机的同时,利用设备加工精度高和长期的技术积累,也开发生产一些减速步进电机和精密丝杆组件等,减速步进电机因为直接将步进电机铣齿轮,而其他厂家一般是在步进电机轴上安装套上齿轮,或者配分体式减速箱。
相比在步进电机轴上安装齿轮,结构的齿轮和电机轴的同轴度精度高、安装可靠性会更高,和配分体式减速箱的产品相比,减速步进电机的机身尺寸更短,成本更低。
下面介绍一下常用的减速步进电机型号。
早期开发的是平行齿减速箱,具体型号有:S42D步进齿轮箱电机:S42D110A-MA3R6,S42D110A-MA7R2,S42D110A-MA009,S42D110A-MA010,S42D110A-MA018,S42D110A-MA036,S42D110A-MA050,S42D110A-MA100,S42D110B-MA3R6,S42D110B-MA7R2,S42D110B-MA009,S42D110B-MA010,S42D110B-MA018,S42D110B-MA036,S42D110B-MA050,S42D110B-MA100。
S60D步进齿轮箱电机:S60D120A-MA3R6,S60D120A-MA7R2,S60D120A-MA009,S60D120A-MA010,S60D120A-MA018,S60D120A-MA036,S60D120A-MA050,S60D120A-MA100,S60D120B-MA3R6,S60D120B-MA7R2,S60D120B-MA009,S60D120B-MA010,S60D120B-MA018,S60D120B-MA036,S60D120B-MA050,S60D120B-MA100。
S90D步进齿轮箱电机:S90D130A-MA3R6,S90D130A-MA7R2,S90D130A-MA009,S90D130A-MA010,S90D130A-MA018,S90D130A-MA036,S90D130A-MA050,S90D130A-MA100,S90D130B-MA3R6,S90D130B-MA7R2,S90D130B-MA009,S90D130B-MA010,S90D130B-MA018,S90D130B-MA036,S90D130B-MA050,S90D130B-MA100。
台达PLC步进继电器与步进指令
台达PLC步进继电器与步进指令台达PLC步进继电器S简介(DVP-ES2)1.步进梯形指令简介(下称STL指令)当步进继电器S结合“步进梯形图”指令STL使用时,相当于一个特殊的接点。
在编程软件WPLSoft中,梯形图显示出的STL指令形式为-<S>-。
而在ISPSoft中,显示为逻辑块的形式。
两种表现形式的实质是一样的,本文程序将以WPLSoft编辑,图1是一个示例。
运行程序:接通X1、S3接通,Y1接通;断开X1,Y1保持接通。
再接通X2、S3断开,随之Y1断开。
也就是说,图1中,S3的通断,控制了Y1的通断;而这是通过STL S3实现的,所以STL S3相当于一个接点。
试用ISPSoft编程软件,打开图1程序,得其形式如图2。
2.STL指令特点实际上,在应用STL指令时,步进继电器的复位,一般是在“状态转换”时进行的,参见图3。
运行结果仍然是:接通一下X1(接通后随即断开)、Y1接通,接通一下X2、Y1断开。
但此时的S3断开、Y1断开,是因为S20接通的缘故,即状态发生了转换,由S3的接通、转换到了S20的接通。
这里,Y1作为试验指示用,实际编程时,应根据具体情况决定STL S3回路块内的驱动器件。
而S20,同样可以如图3的S3一样,继续驱动有关器件。
3.编程示例清楚了指令的工作原理,就可以根据“设计要求”试编程序。
1)示例1。
试编制这样一个程序:接通一下X1、Y1接通,3秒后Y1断开、Y2接通,再3秒后Y2断开、Y1接通,如此循环,直到X2接通,Y1、Y2才全断开。
根据要求,可以编制一个如图4所示的程序,来达到目的。
2)示例2。
取《自学自会PLC指令——三菱FX2N编程技术及应用》(莫操君)的图4-20,按下述要求编制程序;本文附图中,增加了SQ0和SQ3。
程序要求是:把SQ0作为原位,小车在原位时,按下起动按钮SB1(未示出),小车开始前进,遇SQ1停3秒、再前进,遇SQ2又停3秒、再前进,遇SQ3停1秒、然后返回,返回直到遇SQ0停止、等待;暂不考虑中途停止的情况。
12 中厚板的加热设备与热处理设备
12中厚板的加热设备与热处理设备12.1加热炉及其辅助设备中厚板车间为钢材热加工车间,原料加热工序必不可少,加热工序主要设备就是加热炉。
作为一种比较独特的轧制产品——中厚板,由于原料品种、规格较多,所以对加热设备也有一定的特殊要求。
根据不同的产品大纲可选加热炉炉型主要有4种:推钢式连续加热炉、步进梁式连续加热炉、均热炉和车底式加热炉,其他炉型例如步进底式连续加热炉、辊底炉、外部机械化炉、室式炉等很少在中厚板车间作为加热炉使用。
在中厚板车间推钢式连续加热炉和均热炉的使用历史比较悠久,随着对产品质量、产量要求的提高以及加热炉技术的发展,技术性能更为先进的步进梁式连续加热炉逐渐增多。
为适应特殊板坯(锭)、钢种加热的需要又出现了车底式加热炉炉型。
均热炉加热大型板坯(锭),步进梁式连续加热炉和推钢式连续加热炉加热规格居中的连铸坯,车底式加热炉加热大规格坯(锭)、小规格连铸坯和特殊钢种等。
中厚板车间原料板坯长度较短,钢种较多,连续加热炉的主要特点是:多为两排或三排布料,炉子较窄且长,沿炉长方向分多段控制以适应多种加热制度的需要等。
中厚板车间使用的原料以前是轧坯和扁锭,随着连铸工艺和设备的发展大部分现已被连铸坯所代替,而且其厚度有越来越厚的趋势,对于生产特厚板和特殊用途钢仍用扁锭,个别情况还有的用锻坯。
原料装炉可以冷装亦可热装。
随着中厚板轧机的发展,产品规格范围逐渐扩大,车问加热设备也向同时设置多种炉型方向发展。
同时加热炉必须适应板坯厚度日趋变厚、宽度日趋变宽、生产能力日趋变大的需求。
虽然均热炉与车底炉从结构和布置上有很大区别,但两者的加热制度比较接近,都为专设装、出料设备的间歇性加热炉,均热炉对板坯(锭)的规格范围和形状限制比较严格,烧嘴数量较少,温度均匀性稍差。
作为同一类型的加热炉,以车底式加热炉为代表进行论述和比较。
以下着重叙述步进梁式连续加热炉、推钢式连续加热炉和车底式加热炉。
12.1.1步进梁式连续加热炉12.1.1.1 对板坯尺寸和形状的要求步进梁式连续加热炉所用原料应符合YB/T 2012--2004《连续铸钢板坯》标准。
24BYJ48编码BOM最新

1 2 5.66 0.16 0.004 1
1
PCS PCS g g g PCS PCS PCS PCS PCS PCS PCS g
骨架组件/漆包线/环保锡条/助焊剂 φ 22.8*φ 10.6*0.6 φ 0.12/2UEW FLUX C177 上骨架/下骨架/焊针 φ 22.4*φ 12*4.2 φ 22.4*φ 12*4.2 5.4*0.6*0.6 440*270*50 440*270*13 460*280*230 颗粒状 盲孔五金件 CU-270
客户: 客户: 品名:24BYJ步进马达 电气规格: 5.0 VC
深圳电机有限公司
作 成 审 核 批 准 标准化
机型:24BYJ48-033 文件编号:W24BJ-033-00 制定日期:2013-6-29 NO 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 MLI M B M M B B M B B B M B B M B B B B M B B B M B B M B M B B B B B M B B B B M B B B B B B B 4 5 5 5 5 5 3 4 4 5 5 5 5 5 3 4 4 4 4 5 5 3 4 4 4 4 3 4 4 4 4 5 5 层次
24BYJ48001-01-01-01 24BYJ48001-11-01-00 24BYJ48001-10-01-00
1
1
1
1 2 1 1 1 1 1 1 3 1 1 1
24BYJ48001-07-00
SE系列全数字步进驱动器CANopen通讯软件使用手册说明书

CANopen通讯软件使用手册版权申明感谢您购买北京和利时电机技术有限公司的SE系列全数字步进驱动器(以下简称驱动器)产品。
SE系列全数字步进驱动器是以美国TI公司最新的数字处理芯片(DSP)作为核心控制芯片,采用了先进的全数字式电机控制算法,完全以软件方式实现了电流环控制,具备良好的鲁棒性和自适应能力,可配合多种规格的步进电机,实现速度、力矩和位置高精度、高响应的控制,适应于需要快速响应的精密转速控制与定位控制的应用系统,如:医疗机械、印刷机械、包装机械、造纸机械、塑料机械、纺织机械、工业机器人、自动化生产线等。
本用户手册是针对SE系列全数字步进驱动器的通信手册。
在本手册中,详细地说明了驱动器的串行通信CANopen总线通信协议和使用说明,以此来帮助用户建立上位控制器与驱动器的通信连接。
在使用SE系列驱动器的通信功能之前,请仔细阅读本用户手册,以保证正确使用。
第一章 通信功能简介 (1)第二章 CANopen协议 (2)2.1. 设置 (2)2.1.1. 设置站址 (2)2.1.2. 设置通信波特率 (2)2.2. CANopen通信规范 (3)2.3. 通信对象标识符地址分配 (3)2.4. 通信对象 (4)2.4.1. Network Management Objects(NMT) (5)2.4.2. Synchronization Object(SYNC) (5)2.4.3. Emergency Object(EMCY) (5)2.4.4. Process Data Object(PDO) (7)2.4.5. Service Data Object(SDO) (12)2.4.6. Nodeguard (15)2.4.7. Heartbeat (16)2.4.8. Bootup (17)2.5. 网络初始化和系统Bootup (18)2.5.1. 初始化流程 (18)2.5.2. NMT状态机 (19)2.5.3. 设备状态和通讯对象的联系 (21)2.5.4. 设备状态转换 (21)2.5.5. Bootup (22)第三章 CANopen 设备规范 (23)3.1 PDO映射 (23)3.1.1 RPDO映射 (23)3.1.2 TPDO映射 (23)3.2 设备控制 (24)3.2.1 状态机 (24)3.2.1.1 状态转换 (26)3.2.2 对象描述 (26)3.2.2.1 对象6040h:控制字 (27)3.2.2.2 对象6041h:状态字 (28)3.2.2.3 对象6060h:操作模式 (30)3.2.2.4 对象6061h:操作模式显示 (30)3.2.3 协议位置模式(Profile Position Mode) (30)3.2.3.1 对象607Ah:目标位置 (31)3.2.3.2 对象6081h:协议速度 (31)3.2.3.3 对象6083h:协议加速度 (31)3.2.3.4 对象6084h:协议减速度 (32)3.2.3.5 功能描述 (32)3.2.4 速度通讯模式 (34)3.2.4.1 对象60FF:给定速度 (34)3.2.4.2 对象6083h:协议加速度 (34)3.2.4.3 对象6084h:协议减速度 (35)3.2.5 周期位置模式 (35)3.2.5.1 对象607Ah:目标位置 (35)3.2.5.2 对象60C2h:周期描述 (36)3.2.6 回原点模式 (36)3.3 使用举例 (38)3.3.1 设备控制操作举例 (38)3.3.2 PDO使用举例 (39)3.3.3 SDO读写对象词典对象、驱动器内部参数对象及保存、恢复默认参数举例 .. 40 3.3.4 协议位置模式使用举例 (41)3.3.5 速度通讯模式使用举例 (43)3.3.6 回原点模式使用举例 (44)3.4 对象词典描述 (46)3.4.1 强制性对象 (46)3.4.2 任意对象 (46)3.4.3 设备协议对象 (50)3.4.4 设备商定义对象 (51)通信功能简介第一章 通信功能简介森创SE系列步进驱动器提供了与上位控制器的标准串行通信CAN总线通信硬件接口,可以实现编辑驱动器功能参数、监视运行状态和在线控制电机运转等功能,端口接线方式请参照相应产品说明书中的连线说明章节。
CPU系列·什么是步进

CPU系列·什么是步进
CPU系列·什么是步进
步进(Stepping)是CPU的一个重要参数,也叫分级鉴别产品数据转换规范,“步进”编号用来标识一系列CPU的设计或生产制造版本数据,步进的版本会随着这一系列CPU生产工艺的改进、BUG的解决或特性的增加而改变,也就是说步进编号是用来标识CPU的这些不同的“修订”的。
同一系列不同步进的CPU或多或少都会有一些差异,例如在稳定性、核心电压、功耗、发热量、超频性能甚至支持的指令集方面可能会有所差异。
对于CPU制造商而言,步进编号可以有效地控制和跟踪所做的更改,也就是说可以对自己的设计、生产和销售过程进行有效的管理;而对于CPU的最终用户而言,通过步进编号则可以更具体的识别其系统所安装的CPU版本,确定CPU的内部设计或制作特性等等。
步进编号就好比CPU的小版本号,而且步进编号与CPU编号和CPU ID是密切联系的,每次步进改变之后其CPU ID也可能会改变。
一般来说步进采用字母加数字的方式来表示,例如A0,B1,C2等等,字母或数字越靠后的步进也就是越新的产品。
一般来说,步进编号中数字的变化,例如A0到A1,表示生产工艺较小的改进;而步进编号中字母的变化,例如A0到B1,则表示生产工艺比较大的或复杂的改进。
在选购CPU时,应该尽可能地选择步进比较靠后的产品。
看不懂 正点原子步进电机 梯形加减速文档
一、概述近年来,随着工业自动化的发展,步进电机作为一种新型驱动器在生产线上得到了广泛应用。
而在步进电机中,正点原子公司的原子步进电机以其稳定性和高效性备受青睐。
然而,对于初学者来说,梯形加减速是一个相对复杂的概念,很多人在使用原子步进电机时会遇到看不懂的问题。
本文将通过对正点原子步进电机梯形加减速文档的解读,帮助读者更好地理解梯形加减速的原理和应用。
二、梯形加减速的概念1. 梯形加减速是指在步进电机运动过程中,根据设定的加速度和速度限制,以一定的步进方式进行加速和减速。
通过合理设置梯形加减速参数,可以使步进电机在运动过程中更加平稳稳定,提高其运行效率和精度。
2. 在正点原子步进电机中,梯形加减速是通过在代码中设置加速度和速度限制来实现的。
用户可以根据实际需要,自行调整这些参数以达到最佳的运动效果。
三、梯形加减速文档的解读1. 了解步进电机的基本参数:在梯形加减速文档中,首先需要了解步进电机的基本参数,包括步距角、细分数、电流等。
这些参数将直接影响到梯形加减速的设置,因此需要在使用前对步进电机的基本参数有一个清楚的了解。
2. 设置加速度和速度限制:在正点原子步进电机的梯形加减速文档中,会详细介绍如何设置加速度和速度限制。
用户可以根据实际需要,灵活地调整这些参数,以满足不同的运动需求。
3. 理解梯形加减速的工作原理:梯形加减速是通过不断改变步进电机的速度和加速度来实现的。
在文档中,会对梯形加减速的工作原理进行详细的解释,帮助用户更好地理解其运作机制。
4. 实际案例分析:为了帮助用户更好地理解梯形加减速的应用,文档中通常会提供一些实际的案例分析,展示不同参数设置下步进电机的运动效果,这对于初学者来说非常有帮助。
四、梯形加减速的应用场景1. 制造业自动化:在制造业中,步进电机通常被应用于自动化生产线上,用于控制各种机械设备的运动。
梯形加减速可以有效地提高生产效率和产品质量。
2. 3D打印:在3D打印领域,步进电机也扮演着重要的角色。
北京七特科技有限公司 7TRSM424X 使用说明书
RS485-ModBus总线接口步进电机驱动器使用说明书(42型:7TRSM4240Q)版本说明Ver1.00建立文档Ver1.01传感器接口改变Ver2.00电源和总线接口定义改变Ver2.01增加变速通信协议Ver3.00增加通信电气隔离、增加到位模式,增加软件设置相电流功能型号从7TRSM4240更改为7TRSM4240Q1.产品特点☆S加减速曲线,运行平稳,用户可更S曲线改参数☆微型设计,安装便利,可与42步进电机一体化☆网络集散控制,RS485(ModuBus-RTU)组网☆支持定位模式、正反转模式、速度模式、到位模式☆停止运行时自动减电流☆电气接口简洁,且接线方便☆零位准确,有复位时的零位脱落动作☆限位,碰到限位信号自动停止,电平触发和边沿触发到位☆提供计算机调试软件、DLL和嵌入式源代码,方便调试和二次开发2.产品参数表一:产品参数产品参数产品可更改运行参数外观尺寸42.2mm×42.2mm×14.5mm可设置电机相电流相电流0.3A-1.7A连续可调可设置细分1、2、4、8、16、32工作电压DC12V-32V可设置运动模式步进细分1、2、4、8、16、32可设置加速系数、启动速度和最大速度步进频率20Hz-20KHz可调可设置电机空闲脱机零位电气PNP和推挽(0-24V)可设置复位光电开关脱落步数限位电气TTL/NPN可设置电机方向通信接口RS485可设置复位、限位触发有效电平存储温度-20°~85°可设置最大步数(找零位开关的最多步数)保护电路过热、过流、过载、电源反接可设置485.ID通信保护电气隔离、TVS、防雷3.电气接口图1:步进一体机电气接口图表2:用户接口定义说明插座:K F 2E D G -3.81V+电源输入DC11V-DC32V GND 电源GNDSH 总线级联信号RS485-A+SL总线级联信号RS485-B-表3:传感器接口定义说明传感器插座:P H D -2×3Vout 默认Vout=V+;可定制选择Vout=5V@30mAHome零位开关输入端,PNP 型,支持0-24V 。
DL-025MAC步进电机驱动器使用说明书

DL-025MAC步进电机驱动器使用说明书北京时代超群电器科技有限公司目录第一章概述 (1)第二章参数说明 (1)第三章驱动器使用方法 (2)1.驱动器接线示意图 (2)2.使用步骤 (4)3.输入信号说明 (4)4.输入信号内部接口电路 (4)5.CP信号的脉冲宽度 (5)7.DIR信号起作用时刻> (6)7.电机升降速设计简介 (6)8.细分设定 (6)9.电机相电流设定 (7)第四章安装尺寸 (7)第一章概述瑞得集团北京瑞业科技发展公司,在1992年推出DL系列全密封、模块化步进电机驱动器,十几年来,其工艺和性能随着电子技术的高速发展不断升级和更新。
DL系列步进电机驱动器品种齐全,可与大多数国产电机进行配套使用,部分产品已经出口到国外。
DL-025MAC步进电机驱动器是DL系列中的新产品,用于驱动两相或者四相混合式步进电机。
体积更小、性能更加稳定。
低频特性有很大提高。
第二章参数说明电流调定值: 0.7A,1.4A,2.1A,2.8A,3.2A,3.5A,4.9A每转步数: 400 (步距角0.9度)1000(步距角0.36度)2000 (步距角0.18度)4000 (步距角0.09度)8000 (步距角0.045度)输入脉冲方式: 单脉冲与双脉冲可选工作电源: AC16V/0.5A与AC20V~40V/4A两组配套电机: 57至86系列二相混合式步进电机第三章驱动器使用方法1.驱动器接线示意图图中标号释义:CP+:单脉冲模式,脉冲正输入端CP-:单脉冲模式,脉冲负输入端U/D+: 单脉冲模式,方向电平的正输入端 U/D-:单脉冲模式,方向电平的负输入端 CW+:双脉冲模式,正脉冲的正输入端CW-:双脉冲模式,正脉冲的负输入端CCW+:双脉冲模式,负脉冲的正输入端CCW-:双脉冲模式,负脉冲的负输入端PD+:脱机信号正输入端PD-:脱机信号负输入端电机与驱动接线:2.使用步骤(1)参考面板提示,通过拨位开关设定您所需要的细分数,在CP脉冲能允许的情况下,尽量选用较大的细分数;(2)参考面板提示,通过拨位开关设定电机的相电流,一般设定为和电机额定相电流相等,如果能够拖动负载,可以设定为小于电机额;定相电流,但不能设定为大于电机额定相电流;(3)参考面板提示,通过拨位开关设定驱动器的半流功能。
有刷直流步进电机参数与型号

有刷直流步进电机是一种应用广泛的驱动电机,通常和齿轮箱一起使用,可以达到减速、调速的功能,输出功率在50W以内,电压在24V内,直径规格在38mm,输出转速、减速比、输出扭矩,传动精度,传动噪音等参数是定制开发而成;下面详细介绍有刷直流步进电机参数、性能、应用等信息。
产品名称:16mm有刷直流电机电机产品分类:有刷减速电机驱动电机:直流步进电机产品型号:ZWMD016017产品规格:Φ16MM减速齿轮箱电压:5V-24V(可定制)产品电流:80-500mA(可定制)减速比:64-216(可定制)输出转速:10-1000 r/min(可定制)输出轴形状:D形轴、圆形轴、双扁形轴、六边形轴、五边形轴、四方轴;性能特点:传动精度、寿命长、齿轮耐用、噪音低。
16mm直流有刷减速电机应用:自动机械传动、广告旋转传动、银行提款机、汽车驱动器、智能家居、机器人传动等。
产品名称:8mm有刷直流步进减速电机产品分类:有刷减速电机产品型号:ZWMD008008产品规格:Φ8MM产品电压:4.2V空载转速:19-1228rpm(可定制)空载电流:95-100mA (可定制)负载转速:15-935rpm(可定制)负载电流:155-160mA (可定制)速比:13-809.1(可定制)齿轮箱类型:行星齿轮箱传动轴:金属传动轴输出轴形状:D形轴、圆形轴、双扁形轴、六边形轴、五边形轴、四方轴;性能特点:体积小、噪音低、寿命长、传动精度高。
8mm有刷减速电机应用:眉笔、照相机、机器人等。
产品应用:有刷直流步进电机广泛应用在智能家居、智能汽车、智能通讯设备、智能医疗设备、智慧物流、电子消费产品、个人护理工具、办公设备、智能机器人、自动工业化。
有刷直流步进电机定制参数范围:尺寸规格系列:3.4mm、4mm、6mm、8mm、10mm、12mm、16mm、18mm、20mm、22mm、24mm、28mm、32mm、38mm;材质系列:塑胶行星齿轮箱、金属行星齿轮箱输出力矩范围:1gf-cm至50kg-cm;减速比范围:5-1500;输出转速范围:5-2000rpm;生产厂家主要产品有:1、全系列精密行星齿轮箱减速电机,直径3.4mm-38mm,功率:0.01-40W,输出转速5-2000rpm,减速比5-1500,输出扭矩1gf.cm到50Kgf.cm;2、通用驱动器、调节器齿轮箱传动机构系统;3、定制化精密齿轮、蜗轮、蜗杆传动机构系统;4、精密、微小的塑胶和特殊金属粉末注塑零件及集成装配组件。
CPU“步进”介绍
CPU“步进”介绍文章编号:C1321552007-11-16 17:37:58问题描述CPU“步进”介绍总结“步进”的英文是Stepping,Intel的官方文档中将其表述为“Core Stepping,核心步进”。
步进表示的含义是芯片因某种外在因素的变化而导致的物理或者电气特性的变化的产物。
以Intel的处理器为例(下文都以Intel的处理器为例),Stepping的具体值是2-3位由数字和字母组成的字符串。
现在常见的Intel处理器的步进值都是由“一位字母+一位数字”组成的:处理器的步进升级是属于升级中“最细微”形式。
较之制程的升级,步进升级对周边硬件的要求是最低的。
比如,90nm制程的处理器升级到65nm制程,刷新主板BIOS是必须的。
但类似“A0到B0”的步进升级可以直接完成,无需任何额外的动作。
一、步进检测的两种法CPU-Z软件识别那么如何查到一款处理器的步进值呢?最简单的方法是使用CPU-Z这款软件直接读取读取(可以在上下载到最新版的CPU-Z):下载CPU-Z之后,将压缩包解压,直接双击CPU-Z.exe这个文件,稍等几秒钟之后,CPU-Z就会显示读取的处理器相关信息,其中就包括步进。
S-Spec号识别法:火眼金睛还有一种方法就是检验处理器表面的S-Spec,它的准确率也是100%。
上述这张图是一颗Core 2处理器表面的文字,第三行中,第二个字段“SL9SA”就是S-Spec号。
由于S-Spec号都是以“SL”开头,也被称作SL号。
SL号是识别处理器的重要依据,每一个SL号只对应某一特定频率,缓存,外频和步进的处理器。
所以S-Spec号对处理器的分类是最精细的。
处理器的任何一个参数发生变化都会引起SL号的变化。
比如,都是E6300处理器,也会因为步进的不同而有不同的S-Spec 号,但S-Spec与步进的对应关系需要在Intel的网站上才能查到。
二、步进升级成因与成效我们看着CPU的步进一次次的改变,那么背后的变化又是什么呢?任何一款产品,从投产到最终产品寿命的终了,其制造工艺都是遵循着日益成熟的路径来走的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
dim reader as System.Data.SqlClient.SqlDataReader;dim connection as System.Data.SqlClient.SqlConnection;dim command as System.Data.SqlClient.SqlCommand;dim commandText as string;dim JaRD2SQL as string;dim JaRD3SQL as string;dim JunRDSQL as string;dim JaRD2Start as float;dim JaRD3Start as float;dim JunRDStart as float;dim BlankID_Ja2 as string;dim BlankID_Ja3 as string;dim BlankID_Jun as string;connection = new System.Data.SqlClient.SqlConnection(myarea.constr); connection.Open();'钢坯前进commandtext="update XS_JRL_Location set Location=Location+"; commandtext=commandtext+me.BJLength;command = new System.Data.SqlClient.SqlCommand(commandText, connection); command.Prepare();command.ExecuteNonQuery();'判断进入各段时间JaRD2Start=8400;JaRD3Start=16800;JunRDStart=25200;'加热2commandtext="select top 1 BlankID,Location from XS_JRL_Location where "; commandtext=commandtext+" RJa2Flag=0 ";commandtext=commandtext+" and Location>='";commandtext=commandtext+JaRD2Start;commandtext=commandtext+"' order by blanknum desc,CreateTime desc"; mandtext=commandtext;reader = Command.ExecuteReader();while reader.Read()BlankID_Ja2=reader("BlankID");endwhile;reader.close();if BlankID_Ja2 <> "" thenJaRD2SQL="update XS_ZZMXB set InHeat2Time='";JaRD2SQL=JaRD2SQL+now();JaRD2SQL=JaRD2SQL+"' where BlankID='";JaRD2SQL=JaRD2SQL+BlankID_Ja2;JaRD2SQL=JaRD2SQL+"'";if MyArea.Debug == 1 thenlogmessage(me.tagname+"JaRD2SQL:"+JaRD2SQL);endif;mandtext=JaRD2SQL;command.Prepare();command.ExecuteNonQuery();commandtext="update XS_JRL_Location set RJa2Flag=1 where BlankID='"; commandText=commandText+BlankID_Ja2;commandText=commandText+"'";mandtext=commandText;command.Prepare();command.ExecuteNonQuery();endif;'加热3commandtext="select top 1 BlankID,Location from XS_JRL_Location where "; commandtext=commandtext+" RJa3Flag=0 ";commandtext=commandtext+" and Location>='";commandtext=commandtext+JaRD3Start;commandtext=commandtext+"' order by blanknum desc,CreateTime desc"; mandtext=commandtext;reader = Command.ExecuteReader();while reader.Read()BlankID_Ja3=reader("BlankID");endwhile;reader.close();if BlankID_Ja3 <> "" thenJaRD3SQL="update XS_ZZMXB set InHeat3Time='";JaRD3SQL=JaRD3SQL+now();JaRD3SQL=JaRD3SQL+"' where BlankID='";JaRD3SQL=JaRD3SQL+BlankID_Ja3;JaRD3SQL=JaRD3SQL+"'";if MyArea.Debug == 1 thenlogmessage(me.tagname+"JaRD3SQL:"+JaRD3SQL);endif;mandtext=JaRD3SQL;command.Prepare();command.ExecuteNonQuery();commandtext="update XS_JRL_Location set RJa3Flag=1 where BlankID='"; commandText=commandText+BlankID_Ja3;commandText=commandText+"'";mandtext=commandText;command.Prepare();command.ExecuteNonQuery();endif;'均热段commandtext="select top 1 BlankID,Location from XS_JRL_Location where"; commandtext=commandtext+" RJunFlag=0 ";commandtext=commandtext+" and Location>='";commandtext=commandtext+JunRDStart;commandtext=commandtext+"' order by blanknum desc,CreateTime desc"; mandtext=commandtext;reader = Command.ExecuteReader();while reader.Read()BlankID_Jun=reader("BlankID");endwhile;reader.close();if BlankID_Jun <> "" thenJunRDSQL="update XS_ZZMXB set InAvgHeatTime='";JunRDSQL=JunRDSQL+now();JunRDSQL=JunRDSQL+"' where BlankID='";JunRDSQL=JunRDSQL+BlankID_Jun;JunRDSQL=JunRDSQL+"'";if MyArea.Debug == 1 thenlogmessage(me.tagname+"JunRDSQL:"+JunRDSQL);endif;mandtext=JunRDSQL;command.Prepare();command.ExecuteNonQuery();commandtext="update XS_JRL_Location set RJunFlag=1 where BlankID='"; commandText=commandText+BlankID_Jun;commandText=commandText+"'";mandtext=commandText;command.Prepare();command.ExecuteNonQuery();endif;connection.Close();。