xplanner介绍
x-tile原理
x-tile原理X-tile 是一个用于 Linux 操作系统的窗口管理器,它被设计为注重用户自定义体验的轻量级工具。
X-tile 可以使用户管理多个窗口并轻松重新排列它们,使得窗口更加容易管理。
本文将介绍 X-tile 的原理、使用方法和优点。
X-tile 基于 X 窗口系统,通过使用 X11 的输出机制进行工作。
X11 是 Unix 和类Unix 系统上使用的 GUI 框架,它提供了一套 API 用于生成图形化界面。
X-tile 根据用户的要求通过 X11,扫描系统中所有窗口,然后它自动生成一组窗口配置。
这些配置包括窗口的大小、位置和排列顺序等信息。
用户可以通过命令行或图形界面手动调整和配置窗口。
一旦用户调整了窗口,X-tile 会自动重新排列它们。
这样用户就可以坐在电脑前,让 X-tile 帮助他们快速而方便地管理多个窗口。
使用 X-tile 进行窗口管理X-tile 具有灵活且容易使用的界面,可以让用户快速定义和调整窗口。
X-tile 的使用方法如下:1. 安装 X-tile要使用 X-tile,首先需要在 Linux 系统上安装它。
可以通过 Linux 系统的软件包管理器进行安装。
2. 启动 X-tile启动 X-tile 后,它会自动开始扫描您的整个桌面。
3. 选择您要管理的窗口在 X-tile 的窗口列表中选择你想要管理的所有窗口。
你可以使用鼠标或键盘来选择要管理的窗口。
4. 选择您要应用的窗口布局从 X-tile 的窗口列表中选择您想要应用的窗口布局模式。
X-tile 包括了一系列的预设模式,您也可以通过自定义模式来满足您的需求。
5. 重新排列窗口一旦你选择了窗口布局模式后,它会立即重新排列你选择的窗口。
6. 自定义窗口大小和位置你可以使用鼠标或键盘来定义窗口的大小和位置。
你可以把窗口移动到任何地方,也可以把它们压缩或拉伸成任何尺寸。
7. 更改窗口排列顺序你可以使用鼠标或键盘来切换窗口的排列顺序。
Groovy入门教程

Groovy入门教程 Groovy println var.class 你可以看到程序最后输出了var的实际类型为:ng.String 作为例外,方法参数和循环变量的声明不需要def。 2、 不需要的public 你可以把main 方法前面的public 去掉,实际上,groovy 中默认的修饰符就是public ,所以public 修饰符你根本就不需要写,这 点跟java 不一样。 3、 不需要的语句结束符 Groovy中没有语句结束符,当然为了与java 保持一致性,你也可以使用; 号作为语句结束符。在前面的每一句代码后面加 上; 号结束,程序同样正常运行(为了接受java 程序员的顽固习惯)。 4、 字符串连接符 跟java 一样,如果你需要把一个字符串写在多行里,可以使用+ 号连接字符串。代码可以这样写: def var="hello "+ "world"+ ",groovy!" 当然更groovy 的写法是: def var="""hello world groovy!""" 三个”号之间不在需要+ 号进行连接(不过字符串中的格式符都会被保留,包括回车和tab)。 5、 一切皆对象 听起来象是“众生平等”的味道,事实上groovy 对于对象是什么类型并不关心,一个变量的类型在运行中随时可以改变,一切 根据需要而定。如果你赋给它boolean ,那么不管它原来是什么类型,它接受boolean值之后就会自动把类型转变 为boolean值。看下面的代码: def var="hello "+ "world"+ ",groovy!" println var; println var.class; var=1001 println var.class 输出结果: hello world,groovy! class ng.String class ng.Integer var这个变量在程序运行中,类型在改变。一开始给它赋值String ,它的类型就是String ,后面给它赋值Integer ,它又转变 为Integer 。 6、 循环 删除整个源文件内容,用以下代码替代: def var="hello "+ "world"+ ",groovy!" def repeat(val){ for(i = 0; i < 5; i++){ println val } } repeat(var) 输出: hello world,groovy! hello world,groovy! hello world,groovy! hello world,groovy! hello world,groovy! 注意循环变量i前面没有def。当然也没有java 中常见的int,但如果你非要加上int也不会有错,因为从Groovy1.1beta2 之后开 始(不包括1.1beta2),groovy 开始支持java 经典的for 循环写法。 此外,上面的for 语句还可以写成: for(i in 0..5) 这样的结果是一样的。 7、 String 和 Gstring 除了标准的ng.String以外(用’号括住),groovy 还支持Gstring字符串类型(用“号括住)。把上面的for 循环中的语句 改成: println "This is ${i}:${val}" 运行一下,你就会明白什么是Gstring。
MissionPlanner地面站操作使用文档
无人机地面站(GCS)之五兆芳芳创作Mission Planner 操纵使用手册小左实验室101目录Mission Planner 操纵使用手册11.Mission Planner简介2错误!未指定书签。
??飞控板固件加载错误!未定义书签。
??链接飞控板??5.Mission Planner显示面板及特点55.1连接 Connect55.2遨游飞翔数据Flight Data5错误!未指定书签。
????初始化设置??Initial??setup6????参数配置和调整??Params??Configure安定tuning??????仿真器错误!未指定书签。
6遨游飞翔任务计划78.开源Mission Planner的二次开发根本298.1Visual Studio Community 13.0打开Mission Plannersolution298.2 宣布修改后的Mission Planner311.Mission Planner简介Mission Planner是无人机地面控制站软件,适用于固定翼,旋翼机和地面车.仅仅在windows系统下任务.Mission Planner可给你的自动车辆提供配置东西或动力学控制.其主要特点:●给控制板提供固件加载●设定,配置及调整遨游飞翔器至最优性能●通过在地图上的鼠标点击入口来计划,保管及加载自动任务给飞控板●下载及阐发由飞控板创建的任务记实●与PC遨游飞翔模拟器连接,提供硬件在环的UAV模拟器●通过适当的数传电台,可以监控遨游飞翔器状态,记实电台传递数据,阐发电台记实或在FPV模式下任务2.Mission Planner装置Mission Planner是windows系统上的自由开源软件,装置很是复杂.首先下载最新Mission Planner 装置文件2.运行装置文件,并按向导执行便可.3.装置包将自动装置所需软件驱动,包含DirectX plugin,如遇下面情况,请选择装置软件驱动便可.4.软件将装置到 C:\Program Files (x86)\APM Planner,并创建打开Mission Planner的图标在开始菜单.5.装置完毕后,便可启动Mission Planner ,启动后便可通过连接按钮,下载固件或连接飞控板.6.如果有升级版本,软件自动通知●用MicroUSB连接Pixhawk飞控板,USB连接PC机.●打开Mission Planner软件,左上角区域从下拉菜单中选择COM口,可以选在AUTO选项,并设置串口通讯波特率为115200.●在主画面上,选择Initial Setup | Install firmware画面,选择恰当的遨游飞翔器图标,答复提示画面“Are you sure”"Yes".当Mission Planner探测到pixhawk后,将要求你拔下飞控板,再次拔出飞控板,数秒后点击OK按钮,这个期间满足bootloader接受下载新固件的请求.●当下载完美结束后,在软件状态条处显示“erase”,“program”,“verify..”和“upload Done”等信息,标明固件下载成功.●连接飞控板和PC机可以选择USB电缆,数传电台或IPConnection.●在Mission Planner软件的左上角,选择连接的串口号和波特率57600,并点击连接.串口号是windows自动提供的,并在下拉菜单中出现.注意连接波特率必须悬着57600,而下载固件时的波特率必须选择115200.●连接成功后,连接按钮将显示Disconnect,用于断开连接操纵●如果遇见没有连接上,可能的原因如下:查抄正确的波特率,USB为115200,数传电台为57600查抄串口号是否正确,串口号是否存在?如果是USB口,请测验考试不合的USB口如果使用UDP或TCP连接,查抄防火墙是否疏通●飞控板上电后,会有声音和LEDs等显示状态,以确认飞控板固件运行正确5.Mission Planner显示面板及特点Mission Planner功效分为:连接,遨游飞翔数据,5.1连接 Connect用于下载固件到飞控板,或通过数传电台连接飞控板5.2遨游飞翔数据Flight Data●Mission Planner GCS主画面,数传电台与遨游飞翔器连接后,主画面显示如下数据:●HUD细节:1.空速(地速,如果没有装置空速管)2.转弯速率 3.航向 4.侧滑角 5.电台连接,bad packets% 6.GPS 时间7:高度8.空速9.地速10.电池状态11.人工水平线1215状态显示●小提示:地图显示当前GPS锁定位置当飞机右倾时,人工水平线左倾,飞机左倾,人工水平线右倾飞机状态输出,WPDist:代表距离下一个航点距离BearingERR:航向角偏差 AlterERR:高度偏差,WP:下一个航点 Mode:当前遨游飞翔模式Plane output: 自动驾驶仪输出的前4个通道信号autopilot状态下,可以发送遨游飞翔指令,当遥控器处于手动模式位置时,发送遨游飞翔指令无效双击HUD,会全屏显示HUD双击速度仪表,可以IU改最大比例尺可以下载地图替代谷歌地图,按下controlF,允许你上传图,制导模式:鼠标右键点击菜单,点击“fly to here”可以控制遨游飞翔器遨游飞翔,偏离原来计划航点5.3遨游飞翔计划 Flight Planning●左上角显示鼠标,显示当前经纬度,●右侧显示控制面板●在下面显示航点信息及动作.5.4初始化设置 Initial setup●初始化固件,当要下载新固件时●3DR数传电台设置,数传电台●其他可选硬件设置,比方超声波传感器,光流传感器等等5.5参数配置和调整 Params Configure安定tuning以下这些菜单,需要与飞控板连接以后才干看到●Planner:地面站选项,诸如logs,丈量单位,ETC等存储●Basic Pids:Auto pilot连接以后,这个选项出现,TBD.●Flight Modes:如何设置6个通道的遨游飞翔模式●Standard Params:auto pilot连接上后,会出现这个菜单TBD●GeoFence: 遨游飞翔区域设置●FailSafe: 毛病模式●Advanced Params: 初级参数设置●Full Parameter List:遨游飞翔器的所有飞控参数都可以在这里设置并保管,并能比较,加载以前的数据.●Copter Pids: 设置Copter遨游飞翔器的pids参数仿真初级选项菜单Advanced View,当使用HIL仿真技巧,配置选项设置画面6遨游飞翔任务计划Mission Planner可以给遨游飞翔器设置自动任务,当遨游飞翔器处于auto模式时启动自主遨游飞翔模式.●设置Home Position: 对于Copter,Home Position就是飞控板上电的位置,这意味着如果执行RTL模式,将自动出航到Home Position.对于固定翼飞机,Home Position 是GPS第一次锁定的位置.●任务简述:Copter任务,自动起飞到20m高度,然后遨游飞翔到WP2点,爬升到100m高,然后等待10秒,然后遨游飞翔器将处理WP3,下降到50m,然后出航下降.因为缺省的高度是100m,因此出航着陆高度也是100m.当到达着陆地点后,飞机下降.任务假定着陆地点在起飞点.●在航点设置画面的下方,有详细的航点计划及动作,可通过下拉菜单改动航点动作,通过地图鼠标拖拉改动航点位置.●缺省参数设置:Default Alt:缺省的遨游飞翔,RTL模式时,有自己的高度,如果Hold Default ALT选定后,RTL将按高度遨游飞翔; Verify Alt,与地图数据匹配,查抄高度数据,已反响距地高度,进行地形匹配或避免撞地.●通过右侧按钮可以保管飞行任务,加载飞行任务,便利重复执行任务.●Prefetch 提前下载地图数据到地面站,避免在野外无网络,无法连接地图数据.点击Prefetch按钮后,按下alt 键,用鼠标拖动的矩形区域下载选择的位置图片●Grid:鼠标右键菜单,通过点击增加顶点的方法绘制一个多边形,然后点击Grid菜单,自动绘制一个网格状的航点轨迹,然后在定义在每个航点的动作.●设置Home Location菜单,通过鼠标可以任意设置HomePosition●通过Measure Distance按钮,丈量航点之间的距离●Auto grid :Auto grid功效可以生成“割草机”轨迹,以收集当地的图片.在地图上选择鼠标右键,选择多边形绘制需要的区域,选择auto WPGrid菜单,依照对话框自动处理高度和距离,将自动生成如下网格航点:●任务指令:在地图的下方有表格的列表,将按当前遨游飞翔器类型产生指令列表,并增加一列航向参数需要用户提供.这些指令包含:导航到航点,临近盘旋,执行特殊动作(如拍照等)和条件指令.全部的指令在Mavlink Mission CommandMessages 定义.MavLink协议定义了大量的Mav_cmd 航点指令(通过MavLink_mission_item_message传递),飞控板处理这些指令和命令行参数,这些命令必须是与指定遨游飞翔器相关的,无效指令将被疏忽.每种遨游飞翔器只执行相关的命令和命令行参数,不相关的指令疏忽不执行,可能还有些有用的命令行参数没有被处理,由于消息大小限制.●指令分类:navigation导航命令用于控制无人机移动,包含:起飞,移动到航点,改动遨游飞翔姿态,着陆;DO 动作命令:帮助功效,不影响遨游飞翔位置,比方相机快门,抛投伺服等;Condition条件命令,用于延迟DO 命令,至到条件满足,例如:UAV达到指定高度和指定航点的距离条件.对于指定航点,一般先执行NAV导航指令,只到完成导航任务或在航点一定误差规模内,然后在执行一些列DO命令当条件完成后.●Mission Planner支持的旋翼机指令:MAV_CMD_MISSION_START:启动当前任务,自动(不必油门),参数:无MAV_CMD_DO_REPEAT_RELAY:给指定输出管脚指定洼地电平,按指定周期循环次数,参数:1管脚号2pwm 3repeat# 4cycle(s)MAV_CMD_DO_DIGICAM_CONFIGURE (Camera enabled only):MAV_CMD_DO_DIGICAM_CONTROL (Camera enabled only):MAV_CMD_DO_SET_CAM_TRIGG_DIST (Camera enabled only):MAV_CMD_DO_SET_ROI:指定云台指向区域,参数:5,6,7MAV_CMD_DO_SET_MODE:设置系统模式,preflight,armed,unarmed,参数:1MAV_CMD_DO_JUMP :切换到指定航点多次,参数:1,2MAV_CMD_NAV_TAKEOFF:起飞指令,所有任务的第一次指令,参数:7MAV_CMD_NAV_LAND:着陆,指定区域,参数:5,6 需退出Auto模式,切断动力MAV_CMD_NAV_LOITER_UNLIM:飞到指定区域,然后盘旋,参数:5,6,7MAV_CMD_NAV_LOITER_TURNS:指定区域盘旋,给定盘旋半径,参数:,??,??,??MAV_CMD_NAV_LOITER_TIME:指定区域盘旋,给定盘旋时间,参数:,??,??,??MAV_CMD_CONDITION_CHANGE_ALT :按指定爬升或下降速度改动至指定高度,参数:,????按指定速度升降至指定高度.MAV_CMD_NAV_SPLINE_WAYPOINT:依照曲线形式飞行到指定位置,参数:,??,??,??MAV_CMD_CONDITION_YAW:航向更改,参数:,??,??MAV_CMD_DO_MOUNT_CONTROL:控制相机云台,参数:1,2,3 pitch,roll,yaw 度数MAV_CMD_DO_PARACHUTE (Parachute enabled only):MAV_CMD_DO_GRIPPER (EPM enabled only):MAV_CMD_DO_GUIDED_LIMITS (NAV_GUIDED only):MAV_CMD_NAV_GUIDED_ENABLE (NAV_GUIDED only)●相机快门和云台指令3个通道●在遨游飞翔器移动的距离时间或指定的航点上执行快门动作,如果相机装置在云台上,还可以控制云台的指向●对于复杂的应用,可以手动控制航点和快门指令,对于庞杂的测绘任务,自动生成任意区域的指令任务.●云台指令:DO_SET_ROI 云台指向指定区域,DO_MOUNT_CONTROL 云台控制到roll,pitch,yaw标的目的●伺服指令:DO_SET_SERVO:DO_SET_RELAY给指定的驱动信号●自动任务举例1:Create WP Circle — Create a circle of waypoints.Area — Displays the area of the current polygon (if defined).Create Spline Circle — A circle where the altitude of waypoints follows a rising spline (relevant to flying vehicles).Survey (Grid) — Automatically create waypoints and camera control commands to survey a specified polygon.Survey (Gridv2) — Under construction! This is a simpler grid control for creating a rectangular survey area.SimpleGrid — A simple autocreated survey grid. No camera control is defined, so this must be added separately.自动任务举例2:在遨游飞翔计划画面,创建多点区域在区域内,鼠标右键点击菜单:Auto WP|Survey (Grid):Mission Planner 将自动显示配置画面,画面上定义了相机参数,并自动计较拍照距离,即DO_SET_CAM_TRIGG_DIST命令参数.当点击"Accept"按钮后,接受这些参数,Mission Planner将生成一系列航点笼盖指定区域,包含起飞和着陆航点,调用DO_SET_CAM_TRIGG_DIST指令,用于设置相机快门指令的距离,最后再次调用DO_SET_CAM_TRIGG_DIST来设置参数回0,停止拍照.注意2次调用指令的参数不合.最后,执行任务后,会得到15张图片.当遨游飞翔器执行RTL(Return To Launch)模式,比方被失效庇护Failsafe模式启动,缺省的模式前往出发点,但是经常性这种情况不成实现,由于距离和电量的关系.鉴于此种情况,我们现在支持多点Rally Points模式.只要无人机进入RTL模式,就会就近找到Home Point或最近的Rally Point,而不是前往起飞点.飞机将会在当地盘旋,Copter将会试图下降设置Rally Points,在遨游飞翔计划地图上,点击鼠标右键,选择菜单RallySet Rally Point,Rally Point高度需要设置,重复上面的操纵,重新设置多个Rally Points,点击菜单按钮上传数据,便可小提示:当使用geofence时,Rally point不克不及出界;确认RallyPoint的高度足够高,以避开修建或山丘;因为内存关系,一般最多设置10个接力点,对于固定翼飞机,盘旋半径与其他盘旋点一致,由WP_LOITER_RAD参数确定;RTL_ALT等参数没有用到.固定翼无人机 3.0.4以后都有地形跟踪功效,Terrain following, 即要求飞控板有当地存储数据,如Pixhawk.Copter 3.4以上版本支持地形数据,支持任务和着陆.●Terrain Following 保管数据在microSD上,地图数据给出地形海平面高度,在Pixhawk,数据存储在APM\TERRAIN 目录下,在MicroSD 卡上.●这些数据可以通过2中方法传递到飞控板上,一种是USB方法,一种是数传电台方法,一旦地形数据存储到SD卡上后,当GCS不连接后,就会用于遨游飞翔控制.当然这些数据,只用于Auto模式,RTL模式●地形数据可以通过数传电台,向地面站请求,也可以保管在SD卡上●地形跟踪遨游飞翔模式:RTL,Loiter,Cruise,FbwB,Guided(Flyto),AUTO●地形参数TERRAIN_FOLLOW.参数缺省是封闭的,因此没有地形跟踪使用,一旦设置TERRAIN_FOLLOW为1,就启动了地形跟踪模式●地形跟踪用于:FPV,Safe RTL,Aerial Photography●地形数据:地面站从网上下载,这里设计TERRAINSPACING,TERRAIN_ACCURACY参数,辨别描述地形跟踪的精度和最小距离.●设置固定翼地形跟踪:确定固定翼 3.0.4固件,确认Mission Planner1.3.9更高版本,设置TERRAIN_ENABLE为1 并且TERRAIN_FOLLOW为1,当GPS锁定后,通过USB连接飞控板,查抄flightData>Status ,查抄地形跟踪状态数据●地形跟踪对于机头指向很敏感,当前位置指向的遨游飞翔轨迹遨游飞翔时,包管固定翼遨游飞翔爬坡足够,能够避开地形数据.地形指向参数TERRAIN_LOOKAHD参数,爬坡参数TECS_MAX_CLIMB参数,与地形跟踪相关.●有2种遨游飞翔数据记实,即DataflashLogs机载数据记实,适用遨游飞翔当时下载进行研究.对于Copter遨游飞翔器,上电后即开始记实.Telemetrylogs电台数据记实,通过电台记实遨游飞翔数据到Mission Planner地面站中,两者的数据根本一致.●机械毛病:通常机械毛病包含ESC毛病或电机毛病,或螺旋桨损坏,这些毛病表示:期望的俯仰和滚转指令与丈量的俯仰和滚转传感器数据出现巨大差别,这中不一致在dataflash logs 中体现数据的严重别离,如下图:●振动:高频振动会引起Copter的加快度传感器,基于高度和水平位置估量的漂移偏大,将导致高度保持不稳定或盘旋出现漂移.振动数据可以从dataflash数据的IMU 数据中的AccX,AccY,AccZ数据看出.水平数据AccX,AccY征程规模在-3-+3m/s/s,AccZ在155m/s/s规模内,正常情况时,加快度会不是变更随着Copter的遨游飞翔变更,对于可接受的振动规模拜见下图:Tlogs RAW_IMU数据更新频率为10HZ,比较慢,欠都雅出是遨游飞翔带来的问题仍是振动带来的问题,而DataFlash 中的数据更新频率是50HZ,看振动现象比较容易.如果TLOG中的xacc,yacc数据在300+300之间,zacc在5001500之间,下面的数据标明在高度保持进程中,出现了振动问题,尽管更新速率比较慢.指南针搅扰:指南针搅扰通常是电源板散布导致磁场变更引起的,比方电源,电机,电调等引起的电磁场变更,可能引起指南针传感器问题而引起遨游飞翔标的目的错误,通过绘制tlog中的mag_filed和油门数据VFR_HUD,就很容易找到问题所在.下面的图像显示,一种可以接受的电磁搅扰,可见mag_field数据变更在10%20%,当throttle迅速拉起后,一般低于30%的搅扰都是可以接受的,30%60%的搅扰是模糊地带,也可能是ok,如果在油门拉起后,mag_field 高于60%是绝对不成接受的.小提示:mag_field数值在120550之间,在各地有所不合;磁场搅扰在compassmot setup中有设置;Dataflashlog中的COMPASS消息中,与RAW_IMU xmag,ymag,zmag数据一致;磁场数据有抵偿,一般子150+150之间,SENSOR_OFFSET变量组,mag_ofs_x,mag_ofs_y,mag_ofs_z;在上图中的开始阶段,磁场强度有一个短暂的脉冲可以疏忽,因为在油门拉起之前,因为它可能是上电引起的磁场强度的突变.GPS毛病:当在自动模式,RTL,AUTO,Loiter,由GPS信号产生的位置误差可能引起Copter位置错误,导致错误Copter猖狂的飞向错误的地点,这中间那个毛病会在tlogs和dataflashlog记实中体现,即卫星数量的削减和hdop的增加.tlogs画图,GPS_RAW_IT组,“eph”和“satellites_visible”值,拜见上图,卫星数量低于9,陪伴明显的GPS位置改动.在Dataflashlogs中,GPS消息可以看"HDop"和“NSats”列,注意:hdop值与DataflashData中的值单位不合.●电源毛病:电源模块提供可靠电源供电,但也有失效的时候,这些可以从logs中,机Copter还在空中(气压计,惯性传感器丈量高度数据)的时候,突然掉电的现象可从logs中看到.Dataflash,CTUN消息种的BaroALt,GPS消息,ReALt,Tlog中的VFR_HUD alt,GLOBAL_POSITION relative_alt数据绘制曲线图如下:板电压信号变更规模在0.100.15之间是正常规模.由于与其他设备同享电源,导致供电电压的动摇,极可能引起供电电源的失效或其他异常行动,板子的电压可通过如下办法绘制:Dataflash CURRENT 消息的VCC,Tlog HWSTATUS中的Vcc来绘制,下面的图,标明在油门推动后,板电压下降0.15V,在允许规模内,第2张图标明电压随机变更在0.15V 规模内,可接受.●未知的ERRORS包含失效Failsafes:当遨游飞翔控制器产生异常行动时,会引起失效庇护模式failsafes.有5种失效庇护模式可以被激活:油门失效,GPS失效,GCS失效,电池失效和越界.理想的办法是在dataflashlog数据第一列中过滤"ERR",所有的ECode都在源代码文件defines.h文件中有说明,●Tlog 是在MAVLink telemetry 消息一发送,即自动开始创建记实,文件格局为YYYYMMDD hhmm0ss.tlog在Mission Planner的装置目录下的logs目录中,同时.rlog 文件也生成,包含所有的tlog文件中内容和调试信息,这个文件的调试信息不克不及用于回放.●设置数据传输的速率,Software>Planner telemetry 下拉菜单来设置传输数率.因为所有的数据斗记实在tlog中,这个也控制保管在tlog中的数据.实际保管的数据可能比请求的数率低,由于CPU的原因.●任务回放:数据记实后,可以通过回放来不雅察数据记实.点击Telemetry logs tab,点击"Load Log"并找到tlog文件,点击"play"按钮便可.在回放进程中,可以跳到你期望的遨游飞翔时段不雅察遨游飞翔数据,通过滑块操纵.当回铺开始后,HUD将显示无人机在地图中的位置和遨游飞翔状态.点击图中的“Tuning”选择框,然后双击数据显示坐标,就会弹出显示数据的对话框,用于用户选择显示数据曲线.●创建3d遨游飞翔轨迹图像:可创建KMZ文件,选择Telemetry Logs tab,点击Tlog>Kml or Graph按钮,再按下"Create KML+GPX"按钮,选择flight tlog,拜见下图:经过如上操纵后,.kmz和 .kml文件将在tlog文件的根本上创建,这个文件讲可以在goole地球上看到3d的遨游飞翔轨迹.可以通过双击或拖动方法,在谷歌 Earth上查抄遨游飞翔和轨迹,不合的遨游飞翔模式显示不合的色彩轨迹.●提取参数和航点:从tlog文件中提取参数和航点信息,创建.KML文件,这些文件可以excel文件提取,航点信息文件也可以用于遨游飞翔计划的加载数据.●从遨游飞翔数据绘制图形:切换到flight data 画面,点击telemetry logs画面,点击"Tlog>Kml or graph"按钮,点击"Graph Log"按钮,选择flight tlog文件.注意:画图窗口可选择绘制的曲线,在绘制的曲线上,左右鼠标用于给绘制图形定义比例尺,可选择绘制色彩,通过鼠标滚轮改动图形的窗口大小等等小技能.Dataflash logs存在在飞控板上,如pixhawk的dataflash上,可以下载到Mission Planner上,来不雅察数据.●通过MAVLink下载logs:usb连接飞控板,打开MissionPlanner Flight Data 画面,在左下角的"DataFlash Logs"画面中,点击"Download Dataflash Log Via Mavlink"按钮然后选择你要下载的数据,这些数据讲保管在MissionPlanner/logs目录中.●自动阐发logs数据:通常点击"Log Analysis"按钮,选择一个Log文件,然后生成最为复杂的根本陈述,这个陈述将显著显示通常的问题.●手动查抄log:点击"Review a Log"按钮,选择log文件,查抄更加详细的信息,详见下图:以上这些信息包含GPS,IMU等数据,拜见下图绘制图形:选择适当的行,会看见当前列的头,然后找到期望画图的列,点击"Graph this data"按钮.例如ATT's的ROLL_In和ROLL数据绘制图如下:鼠标转动键用于缩放图形,也可以选择要仔细不雅察的区域,土多鼠标邮件选择设置比例尺等等操纵来查抄数据;也可以过滤相关消息类型,选择要选择的消息,在下拉菜单中选择.●设置想要记实的数据:LOG_BITMASK参数用于控制在dataflash记实的数据,最新版本可以设置独立的消息,如下:●消息细节:ATT(姿态信息),ATUN(自动调整),ATDE,CAM,CMD,COMPASS,CURRENT,CTUN,D32,DU32,ERR,EKF,GPS等信息如果有数传电台,就能够在Mission Planner地面站上记实遨游飞翔数据在".tlog"文件中,你加载和任意回放并转换为"KMZ"文件,在谷歌地球上看遨游飞翔轨迹,下图是播放画面:当log文件回放时,可以通过点击地图上的"Tuning"选择框阐发数据,可双击数据坐标弹出对话框,让你选择那数据是你想绘制的.如下图:●飞控板的加快度传感器对振动很是敏感.加快度计的数据可以用来估量遨游飞翔器的位置,若有额定的振动会导致依赖精确位置的遨游飞翔模式的遨游飞翔性能下降.振动影响所有的遨游飞翔器类型,尤其对Copter无人机在AltHold,Loiter,RTL,GUIDED,Position 和AUTO 遨游飞翔模式.如果你发明振动超出容忍规模内时,可以依照下面的办法设置振动阻尼.●Copter3.3以上版本:完成一次常规遨游飞翔,下载dataflash数据;使用GCS不雅察VIBE消息的VibeX,VibeY,VibeZ数据,这些数据是加快度m/s/s输出的尺度偏差.下图是3DR IRIS提取的数据,标明正常的规模在15m/s/s,但不时会有尖峰变更到30/s/s,最大可接受数值显示要低于60m/s/s.图上曲线Clip0,Clip1,Clip2数值,每次增加都可能达到最大值极限值16g,理想状态,这些数值应该为0或更低的数据<100,除非遨游飞翔器硬着陆情况,因此Iris无人机存在严重的振动问题.下面是遨游飞翔器由于振动问题导致的位置估量偏差很大关于振动数值的尺度偏差的计较拜见相关文献.对于振动的丈量以及预算对遨游飞翔器的设计改良很有帮忙.8.开源Mission Planner的二次开发根本8.1Visual Studio Community 13.0打开Mission Planner solution●Visual Studio Community 13.0是free版本,MS公司提供应团体用户,仅仅能创建客户端程序.Mission Planner GCS地面站是采取C#编程语言编写的开源软件,对于特定客户,可以重新定义软件功效和二次开发●打开Visual Studio;Open>Project>Solution,进入到源代码目录,选择ArduPilotMega.sln, Visual Studio将打开相关应用,包含相关程序包;设置"Solution Configuration" to "Debug"或"Release";设置"Solution Platforms" to "X86"; 在工程窗口,鼠标右键点击"Mission Planner"选择Properties,标识表记标帜和取消"Sign the ClickOnce manifests";●Mission Planner由多个项目组成,你可以通过展开"Mission Planner"和"Libs"来查抄:Mission Planner; AviFile; BaseClasses; BSE.Windows.Forms ; Core ; GeoUtility; .Core; .WindowsForms; KMLib; MAVLink; MetaDataExtractor; ms;MissionPlanner.Controls; MissionPlanner.Utils; px4uploader; SharpKml; ZedGraph;●Building Mission Planner: 在试图编译Mission Planner之前,因该有一个官方的版本,因为有一些".dll"文件没有包含在Git资源中;选择:Select Build>Batch Build...,"Select ALL",然后选择按下"Rebuild ",第一次编译肯定会遇到错误,请测验考试多次这种办法.●如果产生相关的”.dll“丢失的错误,(1).右键点击"SolutionExplorer",选择Properties, Reference Paths; (2) 在文件夹入口,浏览并选择Mission Planner的装置目录,例如:C:\Program Files (x86)\Mission Planner;(3)点击"Add Folder"按钮,添加"installed MP"目录到Reference paths;(4)点击Build Events, 删除所有以前成立和后来成立的选项,偏重新成立.●对于更多的丢失参考,重复以上任务,为每个项目重新设置参考路径,将会削减错误.●如果看到"BSE.Windows.Forms"..Could not locate the codeAnalysis tool At"., 通过取消"BSE.Windows.Forms"的代码阐发中的"Enable Analysis"选项.●在VS情况中,选择BUILD,Configuration Manager后,标明那个一个项目需要每次都要编译;查抄Build ,有些只要编译一次,;重复做,Build Clean Solution,Build,Rebuild操纵.所有项目都没有错误后,编译成功.8.2 宣布修改后的Mission Planner●如果修改成功,你可以成功在当地PC机上使用编译后的文件,但不克不及直接拷贝文件到其他机械上使用,这是因为运行文件需要一系列的依赖文件在不合的目录中,或需要一个打包软件帮忙你完成这个任务●或需要作者参加网络开发组织,去把你的任务加到开源项目中去.。
X plane说明书
点开About 子菜单,弹出一个菜单。
这个子菜单里有五个菜单项,被一个分隔符分割为两块,上面两个菜单项是:关于X-PLANE(About X-Plane)进入这个菜单项,你会看到当前软件的版本,然后是作者名字,然后是官网地址,然后是服务器那边的最新版本号(这个版本号如果和第一行的版本号一直,那么最下面就会出现一行黄字:Your version of X-Plane is up to date.)再下面就是制作人员名单了。
需要注意的是X-Plane 的核心算法和大部分的程序引擎都是由一个人完成的,那就是作者Austin Meyer,其余的人都是一些程序资料和周边的制作者。
最下面还有一个按钮,以Go to...开头的,点击这个按钮,就进入官方网站升级软件的页面。
注意,只要你拿到了光盘,不管是正版还是盗版,都是可以完全免费在线自动升级的。
说明(Instructions)这个东西的意义不是很大,点进入以后,出现一个有五个选项卡的窗口,每一个选项卡点进去以后,都是一些最基本的引路教程,这里建议英文不是很流畅的朋友,可以略过了,因为意义不大。
在分隔符以下有三个菜单项,它们是:自动选择飞机(A.I. Select Your Aircraft)让系统自动随机为你选择一架飞机。
系统自动控制飞机(A.I. Flies Your Aircraft)让系统运用人工智能为你驾驶飞机。
系统驾驶飞机的技术还可以,只是目前有一个问题:经常在超速的时候放襟翼,导致襟翼损坏。
系统控制视角(A.I. Controls Your Views)让系统自动控制观察视角。
没什么特别好说的,想知道,试一下就可以了。
点开Files 子菜单,弹出一个菜单,有四个分隔符把菜单项分成了五块,表示有五个类似功能的模块。
直接从上到下讲解:保存场景(Save Situation)存储场景。
当你点下这个菜单项的时候的那一瞬间的所有飞行数据(包括速度、位置、环境、仪表状态、飞行状态等)都被存入一个文件中。
主流敏捷开发方法:极限编程XP

eXtreme Programming 极限编程-XP
XP概述
X P是一种轻量(敏捷)、高效、低风险、柔性、可预测、科学而且充满乐趣的软件开发方式。在 以前的开发过程中,很多规则已经难于遵循,很多流程复杂而难于理解,很多项目中文档的制作过 程正在失去控制。人们试图提出更全面更好的一揽子方案,或者寄希望于更复杂的、功能更强大的 辅助开发工具(CaseTo o ls),但总是不能成功,而且开发规范和流程变得越来越复杂和难以 实施。X P就是在这样的情况下诞生的,它是灵巧的轻量级软件开发方法,它跳出复杂的流程和文档 ,而是以轻量的框架和极限的思想为核心进行开发。 这里讲的极限编程更像是一套理论知识,面向开发人员的指导,甚至是考核开发人员素质或者说优 异程度的一个思想指标。虽然以下理论看起来难免枯燥无味,但是真正想了解敏捷开发的一些知识 的还是需要好好阅读一下。我个人甚至觉得,X P提出的一些价值,原则,实践,可以用来培训一些 开发新手,成为一套有理论依据的准则。当然,这样的准则还是需要根据情况调整,而不是生搬 硬套。 (文章理论上的东西比较多,不好消化,需要思考理解,如果读者是快餐式阅读,建议不要浪费 时间)
结对编程
简单来说就是两个人坐在一起写程序,结对编程也是一个饱受质疑的举措,一般认为它过于耗费人
力资源,自尊心较强的开发人员也比较排斥结对编程。
当然结对编程也有结对编程的好处:
所有的设计决策确保不是由一个人做出的。 系统的任何一个部分都肯定至少有2个人以上熟悉。 几乎不可能有2个人都忽略的测试项或者其他任务 结对组合的动态性,是一个企业知识管理的好途径。 代码总是能够保证被评审过。
配合是关键
有句经典名言“1+1>2”最适合表达XP的观点,Kent h3eck认为XP方法论的最大价值在于在项目中融 会贯通地运用12个最佳实践,而非单独地使用。你当然可以使用其中的一些实践,但这并不意味着 你就运用了X P方法论。X P方法论真正能够发挥其效能,就必须完整地运用12个实践。你甚至可以 跳出X P开发方法,和其他开发方法进行结合,只要是遵循敏捷宣言的方法,必定有它们共同之处, 也有能够相互配合,更加完善的地方。
MapX培训教程-(含多场景)

MapX培训教程引言MapX是一款强大的地图制作和地理信息系统(GIS)软件,广泛应用于地图制作、空间数据分析、地图发布等领域。
为了帮助用户更好地了解和掌握MapX的使用方法,本教程将详细介绍MapX的基本操作、功能模块和实际应用案例。
通过本教程的学习,用户将能够熟练使用MapX进行地图制作和空间数据分析,为工作和研究提供有力的支持。
第一章:MapX概述1.1MapX简介MapX是一款基于Windows操作系统的地图制作和地理信息系统软件,由美国Intergraph公司开发。
MapX提供了丰富的地图制作和空间数据分析功能,支持多种地图投影和坐标系,可以处理各种类型的地理数据。
1.2MapX的特点(1)强大的地图制作功能:MapX提供了丰富的地图制作工具和符号库,可以制作高质量的地图。
(2)灵活的空间数据分析:MapX支持多种空间分析功能,如缓冲区分析、叠加分析、网络分析等。
(3)易于使用的界面:MapX的界面直观易用,用户可以快速上手。
(4)与其他软件的兼容性:MapX可以与其他GIS软件和办公软件无缝集成,方便数据交换和共享。
第二章:MapX基本操作2.1安装和启动用户需要从官方网站MapX安装包,并按照提示完成安装。
安装完成后,双击桌面上的MapX图标即可启动软件。
2.2地图制作(1)打开地图文件:“文件”菜单,选择“打开”,在弹出的对话框中选择地图文件(.mxd)。
(2)添加图层:“图层”菜单,选择“添加图层”,在弹出的对话框中选择需要添加的图层。
(3)调整图层顺序:在“图层”面板中,拖动图层上下移动,以调整图层顺序。
(4)设置图层样式:在“样式”面板中,选择合适的符号和颜色,为图层设置样式。
(5)添加标注和图例:“标注”菜单,选择“添加标注”,在地图上添加标注。
“图例”菜单,选择“添加图例”,在地图上添加图例。
(6)保存和输出地图:“文件”菜单,选择“保存”,将地图保存为.mxd文件。
“文件”菜单,选择“输出”,将地图输出为图片或PDF 文件。
ArduPilot Mega 说明书
ArduPilot Mega 说明书这里是 ArduPlane wiki,内容包括所有的组装和使用说明。
请使用侧边栏的功能导览。
注意: 如果要找 ArduCopter 的操作说明,请到这里。
? ? ? ? ? ? ? 介绍项目历史项目新闻购买说明书快速入门指南 o APM 2 快速入门指南 o APM 1 快速入门指南设置 o APM2 ? ? ? ? APM 2 板下载及安装 Mission Planner 和飞行软件连接遥控设备首次设置 ? ? o APM 1 ? ? ? ? 组装下载与安装 Mission Planner 及其他飞行软件连接遥控设备首次设置 ? ? 检查传感器逆转舵机和设置普通/升降副翼模式 ? ? ? 飞行 o o APM 开机和校准调整 ArduPlane ? ? ? ? 常用飞机的配置文件 MAVLink 参数说明进阶设定使用地面控制站 ? Mission Planner 使用任务规划器使用硬件开关检查传感器逆转舵机和设置普通/升降副翼模式?HappyKillmore 地面站 QGroundControl ? ? 航点 Widget 参数 Widgeto使用任务规划工具规划和分析任务 ? ? ? ? ? ? ? ? ? 规划航点和任务使用地面站录制和播放任务下载和分析飞行数据配置 PID 使用串口终端与 PC 飞行仿真器交互Python scripting 其他特性增稳模式线控模式自动驾驶模式返航模式(RTL) 盘旋模式o飞行模式 ? ? ? ? ?ooooo ? 模拟 o oo ?使用数据记录器自动起飞和降落启用倒飞设置地理围栏线性飞行的最低高度限制使用 X-Plane 进行半硬件仿真使用 FlightGear 仿真器使用软件再环仿真器可选附件 o 使用无线遥测数据和飞行实时命令 ? APM 1 ? ? ? APM 2 ? ? o ooooooooooo 空速计电压和电流传感器自动襟翼磁力仪简单的相机控制使用游戏游戏杆替代遥控自动相机追踪多副翼通道其他模拟传感器其他 I2C 传感器 3DR Radio Xbee 3DR Radio XbeeOn-screen display (光流传感器)用命令解析器进行高级设置和测试 ? ? 设置飞行模式测试模式 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 遥控输入 GPS 输入 IMU 输出陀螺和加速度传感器输入电池输入(可选) 继电器输出航路显示空速计输出(可选) 绝对气压(高度)传感器输出磁力计输出(可选) Xbee 测试(可选) 导出 EEPROM GPS 原始输入日志指南空速计指南 Xbee 指南电压传感器指南高级设置? ?疑难解答 o 疑难解答附录 o oooo 正确的 LED 行为设置 RC 发射器的 6 种模式失效保护功能命令提示符 (CLI) 设置和测试使用 Arduino 编程 ? ? ? o ooooo 设置编程环境使用 Arduino 为 APM 编程下载和使用 APM 软件 ? 设置选项使用 AVR Studio 刻录程序理解状态/诊断串口输出理解偏航距 APM MAV 命令使用调试终端地面站重刷/更新 GPS 固件 ? ? ? uBlox GPS MediaTek GPS 其他 GPS 模块 APM 2 APM 1 ? ? 使用 AVRStudio 为编码器重建/编程使用 Bus Pirate 为编码器编程o更新 PPM encoder 轫体 ? ?ooAPM 硬件技术细节 ArduPilot Mega 主板ArduPilot Mega IMU 传感器板 APM 代码贡献者指南 ? 使用 Git ? ? ? ? ? ? ? ? 逐步引导使用 Git 贡献代码使用 Git 命令行使用 Git 扩展工具使用 TortoiseGit代码规范使用 Eclipse 编译 ArduPilot Mega 使用 make 编译 ArduPilot Mega 使用JTAG 调试 ArduPilot Megao ? ? 词汇表教学图片来源The DIY Drones Dev Team介绍欢迎使用 ArduPlane 操作说明,此说明会告诉你如何将一般的遥控飞机变为自动驾驶的无人机。
CAX简介介绍

实践操作与案例分析
通过实践操作和案例分析,能够更深 入地理解CAX技术的原理和应用。
学习资源பைடு நூலகம்社区交流
充分利用学习资源,如教材、在线课 程和论坛等,与社区交流学习心得和 经验,能够提高学习效率。
保持更新与跟进
随着CAX技术的不断发展,学习者需 要保持更新和跟进,关注最新的技术 动态和发展趋势。
THANKS
多领域应用
CAX技术不仅应用于机械工程 领域,还拓展到电子、航空航 天、土木工程等多个领域。
未来发展方向展望
智能化
结合人工智能、大数据等技术 ,CAX技术将实现更高程度的 自动化和智能化,减少人工干
预。
多物理场耦合分析
未来CAX技术将更加注重多物 理场耦合分析,例如流固耦合 、热固耦合等,提高分析的全 面性。
• 生物医学
用于医疗器械、人体植入 物等的设计和分析,以及 药物研发中的分子建模。
02
CAX的技术原理
CAX的技术原理
• CAX是计算机辅助技术(Computer-Aided Technologies)的 缩写,它包括计算机辅助设计(CAD)、计算机辅助工程( CAE)和计算机辅助制造(CAM)等一系列技术。这些技术被 广泛地应用于制造业、工程设计领域,以提高设计效率、优化 设计方案、降低生产成本并提升产品质量。下面将对CAD、 CAE、CAM这三个技术进行详细介绍。
05
总结与展望
CAX技术总结
01
02
03
04
集成性
CAX技术将CAD、CAE、 CAM等多种工程分析技术集 成在一起,提高了产品研发的
整体效率。
交互性
CAX技术强调各个分析环节之 间的交互,使得设计、分析和 制造人员能够更好地协作。
XPLANNER
Xplanner 角色
• 项目管理者(Admin) • 编辑者 (Editor) • 浏览者(Viewer)
Xplanner 使用流程
• 管理者使用流程 • 编辑者使用流程
管理者使用流程
XPLANNER
田志涛
XPlanner
• XPlanner 基本概念 • Xplanner 角色 • Xplanner 使用流程
Xplanner 简介
• XP(ExtremeProgramming 极限编程)
– 极限的工作环境 – 极限的需求 – 极限的设计 – 极限的编程 – 极限的测试
XPlanner 基本概念
创建项目
创建迭代(日期无法更改)创建素材(时间 Nhomakorabea以修改)
创建任务
指定任务时间(可以更改)
分配责任人(配对)
通过”所有任务”查看任务分配
通过”量化尺度”查看员工工时
编辑者使用流程
登录
查看当前任务
编辑时间
查看工时
Groovy入门教程
Collection支持集合运算: println collect[collect.size()-1] collect=collect-'a' //在集合中减去元素a(第1个) println collect[0] //现在第1个元素变成b了 同样地,你可以往集合中添加另一个集合或删除一个集合: collect=collect-collect[0..4] //把集合中的前5个元素去掉 println collect[0] //现在集合中仅有一个元素,即原来的最后一个元素 println collect[-1] //也可以用负索引,证明最后一个元素就是第一个元素 (2) Map Map 是“键-值”对的集合,在groovy 中,键不一定是String ,可以是任何对象(实际上Groovy中的Map 就 是java.util.LinkedHashMap)。 如此可以定义一个Map: def map=['name':'john','age':14,'sex':'boy'] 添加项: map=map+['weight':25] map.put('length',1.27) map.father='Keller' 可以用两种方式检索值: println map['father'] println map.length 11 、 //通过key作为下标索引 //通过key作为成员名索引 //添加john的体重 //添加john的身高 //添加john的父亲
Groovy入门教程 Groovy
首页
问答
知识库
圈子
广告服务
搜索
XP团队管理的利器——XPlanner
风格的文本格 式化 与外部工具集的扩展 . 喜 的是 已经 有 IE工具 支 持 × In e D Pa n r 另外还提供 s A 接口. OP 方便地 与其它系统 了 I eI IE n IJ D A有 个插 件 .可 以与 t i
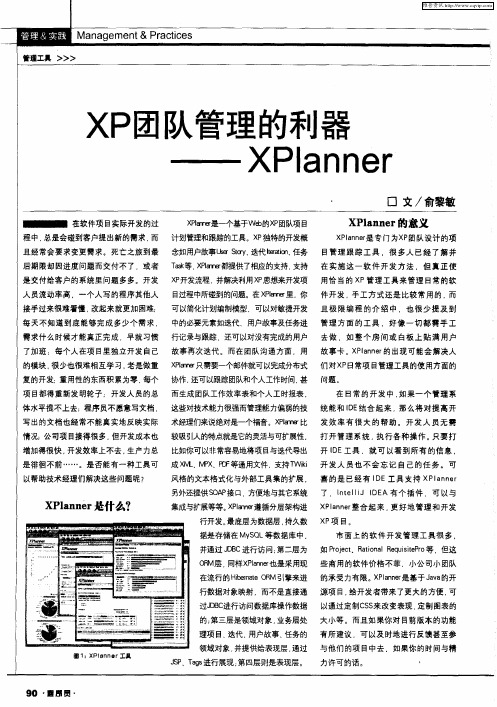
X ln e 是什么? Panr
集成与扩展等等 。 P n r X ln 遵循分层架构进 X l n r 合起 来 更好 地管 理 和开发 ae Pa e整 n
是 交付给客户 的系统里 问题 多多。开发 ) 开发流程 , ( P 并解决利用 ) 思想来开发项 用恰当的× 管理工具来管理日常的软 ( P P 人 员流动率高 , 一个人 写的程序 其他 人 目 过程中所碰到的问题 。在 X l r . P me里 你 件开 发 . 工方 式还 是 比较 常 用的 , a 手 而
过JB 进行访问数据库操作数据 以通过定 制c s 改变表现 . 制图表的 DC s来 定
的: 第三层是领域对象 . 业务层处 大 小等 。而且如 果你对 目前 版本 的功能 理项 目, 迭代 用户故事 任务的 有所 建议 .可 以及时地进 行反馈甚至参 领域对象, 并提供给表现层 . 通过 与他们 的项这有些像上下班打 卡一样 , 小组成 员
通过 X l nr Pa e 这个 工具 ,可以实现 n
安装很简单 , 这里不做 详细介绍 想 每完成一个分解的任务后 ,就去 ” 打卡 ” 上文所提到的多个方面 ,并且紧密配合
增加得很快 开发效率上不去 生产力总 比 如你可以非常容易地将项 目与迭代导出 开 IE工具 .就 可 以看 到所 有 的信 息 D 是徘徊不 前… …。是否 能有一种工具 可 成YV t X D 等通用文件 . JI V P F _ P 支持 T w
Maxlinear XR77XXEVB-XCM-V80 配置模块说明书

October 2017Rev. 1.0.1GENERAL DESCRIPTIONThe XR77XXEVB-XCM-V80 (Configuration Module or XCM) is a board that is designed to act as a USB to I 2C bridge for communication between a PC running PowerArchitect TM 4 configuration and design software and one of MaxLinear’s Universal PMICs.This XCM is for development purposes only. For production, we recommend the use of third-party programming hardware and software. For additional information regarding recommended third-party programming support, visit https:///third-party-programming-supportThe PMIC can either be on a MaxLinear evaluation board or on a customer board. On the right opposite side of the XCM is a 10-pin connector whichis used to connect to theuser’s system board in order to communicate to any of the supported PMICs.The XCM includes a µC with on-board flash so that when powered from the system board, it can act as a boot loader without the need to have a PC connected.This board is compatible with: XR77103, XRP7704, XRP7708, XRP7740, XRP7713, and XRP7714.E V A L U A T I O N B O A R D M A N U A LFEATURES• USB to I 2C Communication for Programmable PMIC Devices • Boot Loader Functionality− Avoids programming the NVM until final configuration known • Powered by USB or System Board • Enables Rapid Prototyping• NOTE: For Development Purposes OnlyEVALUATION BOARD SCHEMATICSFigure 1: XR77XXEVB-XCM-V80 Evaluation Board SchematicsPIN ASSIGNMENTFigure 2: XR77XXEVB-XCM-V80 JP4 Pin AssignmentPIN DESCRIPTIONName Pin Number DescriptionSCL JP4 PIN1 I2C ClockGND JP4 PIN2 GroundSDA JP4 PIN3 I2C DataSig_2 JP4 PIN4 General purpose signal 2I2C Power JP4 PIN5 Connect to the preferred IO voltage. Only required when a voltage other than 3.3V isdesired.Sig_1 JP4 PIN6 General purpose signal 1GND JP4 PIN7 GroundGND JP4 PIN8 GroundENABLE JP4 PIN9 Connects to the EN pin of the XRP77XX. This is an input to the XCM board.VIN JP4 PIN10 Can connect to voltages from 4.5V to 30VORDERING INFORMATIONPart Number DescriptionXR77XXEVB-XCM-V80 Configuration Module for Power Architect 4 Support (for development purposes only)USING THE EVALUATION BOARDO PERATING A SSUMPTIONSThe following are the basic assumptions for the operation of the XCM.•Only one I2C Master is active at any time on the customer board. The user must ensure that only 1 master is active on the I2C lines at the same time. This could entail Host in Reset, Host communication lines disabled, etc.•The user must connect the appropriate signals to from the system board to the XCM JP4. At a minimum; SDA, SCL, and GND must be connected.•VIN and ENABLE must also be connected, if the customer wants the XCM board to operate in “Standalone Mode” (not supported with XR77103).Using I2C CommunicationThe XCM has an on board linear regulator to provide power to the µC and provides power to the I2C lines. The I2C bus pull-up resistors are 4.7kohm. By changing the position of the jumpers on JP2 and JP3, the pull-up resistors can be connected to either the 3.3V provided on the XCM or to the I2C Power connected to JP4 Pin 5. In Figure 2 the jumpers are configured to use the on board 3.3V. Moving them to the other position connects the pull-up resistors to the external I2C Power. IMPORTANT: When using the XCM with XRP7713EVB or XRP7714EVB demo boards, the jumpers should be configured to use the 3.3V provided on the XCM. When using with the XR77103EVB board, the jumpers should be removed since the I2C bus pull-up resistors are installed on the XR77103EVB.If the system board already has pull-up resistors, then the jumpers can simply be removed. This is the most likely scenario for a system intended to interact with the programmable features of the PMIC device on the system board. C OMMUNICATION WITH THE XCMIf the XCM is connected to the PC before starting the PowerArchitect TM4 software, the software should recognize the presence of the board automatically. If the board is connected after the software is started, the user will need to click on “File”, then “Board Search” for the software to find the board.Once the board is identified, the software will add a tab called “XCM” as shown in Figure 3. This feature is not available for XR77103 device.Figure 3: PowerArchitect TM 4 XCM TabLED I NDICATORS:There are 6 LEDs on the board.There are four LEDs grouped in the upper left hand corner of the board as shown in Figure 3. These are defined as:DS3: USB OperationGUI is communicating to XCM (solid on when USB is connected)DS4: Reconfig ModeThe XCM will boot load the supported device with the stored configuration the ENABLE pin transitions from Low to High (not available for XR77103).DS1: USB ActivityFlashes based upon the USB activity betweenthe XCM and the PC.DS5: I2C ActivityFlashes based upon the I2C activity between the XCM and the PMIC.DS3: USB PowerThere is a fifth LED just to the right of the USB connector, which will be on permanently as long as USB power is applied to the XCM.DS6: 3.3V PowerThe sixth LED is in the upper right hand corner. This indicates the LDO is generating 3.3V and the µC is powered.OPERATING THE XCMHere are the two basic operating modes of the XCM.•Pass Through Mode: The XCM is getting itspower from the USB, and thePowerArchitect TM4 GUI is operational. Inthis mode, the “USB Operating” LED DS3will be on.•Standalone Mode: The XCM is getting itspower from VIN of the Customer Board; theGUI is not operational. In this mode, theXCM acts as a boot loader to the supporteddevice (not available for XR77103).P ASS T HROUGH M ODEWhen in USB Mode, the XCM supports pass-thru mode from the PC running PowerArchitect TM 4 to the supported device on the designer’s system board. This operation allows writes/reads to either the shadow registers or Non-Volatile Memory of the supported device•XCM receives commands from the GUI(over USB), and translates them via I2C.•The GUI has the option to write a givenconfiguration to NVM or Shadow Registersof the supported device.•XCM also supports reads from the supported device shadow and NVM registersfor display in PowerArchitect TM 4. S TANDALONE M ODEThis mode is not supported for XR77103.The XCM allows the GUI to save a configuration into Flash on the XCM. In order to enable the boot loader functionality, the “Reconfig Mode” box must be checked. When there is a stored configuration on the XCM flash, the GUI will indicate the presence of that information in the “Graphic of Bytes” box. To store a configuration to the XCM, click the “Same to Module” button.Figure 5: XCM Loaded for Standalone ModeNote that only one configuration can be stored in the XCM. When storing the configuration onto the XCM, a “Success” window will pop up. After clicking “OK” there can be a noticeable delay in the software.Powering the XCMIn order to operate, the XCM must have power provided either by connecting the VIN pin on JP4 to a power source from the system board or from USB power.The XCM’s on board linear regulator has a maximum input voltage of 30V, so whatever voltage source is powering the PMIC device on the system board can be connected to theXCM.Downloading the ConfigurationThe XCM will download the configuration stored on the XCM FLASH memory on every reset of the supported device. It does by monitoring the ENABLE Pin for a LOW to HIGH transition (this is not supported for XR77103). The XCM automatically downloads the saved Flash configuration into the supported device shadow registers via I2C. The register data is loaded in a specific order to prevent mis-operation of the supported device. The XCM first configures Fault Ignore settings, downloads channel information, and finally configures the channel and GPIO enables.One could imagine the result, if the channel was enabled before the control loop PID coefficients were loaded.NVM ProgrammingWhen in Standalone Mode, the primary intention for the XCM is to act as a boot loader into the shadow RAM. However, by installing a jumper between pins 2-4 on JP1, the XCM will program the NVM. There are no diagnostics in this mode. If a device’s NVM has already been programmed, it cannot be re-programmed. If a changed configuration is attempted to be programmed into a previously programmed part, erroneous behavior is highly likely. The reason for including this function is for the developer who has concluded their evaluation and wishes to quickly program the NVM of the PMIC device on additional systems (not available for XR77103).XR77103 supportPower Architect TM4.24 or later makes use of the Sig_1 and Sig_2 signals to poll for PGOOD status from XR77103 and control the nWR pin during XR77103 NVM programming respectively. More information on the Power Architect TM XR77103 support is available in “Power Architect 4 Quick Start Guide”.W HEN T HINGS D O N OT W ORKThe following are potential issues that may cause improper or no operation.•SCL, SDA, or GND are swapped.•Check that the I2C pull-up resister jumperson JP2 and JP3 are in place. Or correctlyconfigured for your system.•If you made your own ribbon cable with a10 pin connector and accidentally attach itreversed, you just tied VIN to SCL and damaged the µC. Time for a new XCM.•You are using 2 foot long wires hangingloose creating an inductive loop which isblocking the I2C communication. Twistingthem together should reduce the inductance.•You can communicate to the part when it isnot operating, but when you turn on theswitching channels, communication stops.This is difficult to fix because the most likely cause is ground bounce caused by poor grounding practices. See ANP-32,“Practical Layout Guidelines for UniversalPMIC Controllers”•Another possibility if communication is notworking is a long ground loop causing noise. One could put an isolator on the I2Cline, but using a notebook computer withthe power adapter disconnected works aswell.EVALUATION BOARD SCHEMATICSBILL OF MATERIALRef. Qty Manufacturer Part Number Size Component1 PCB REV2.0U1 1 Silicon Laboratories C8051F320-GQ LQFP-32 IC 8051 MCU 16K FLASH 32LQFPU2 1 MaxLinear SPX2954M3-L-3-3 SOT-223 IC REG LDO 3.3V SOT-223D1, D2 2 Fairchild MBR0530T1 SOD-323 DIODE SCHOTTKY 500mA 30VDS2, DS6 2 Wurth Elektronik 150120EAS75000 1206p LED AMBER SMDDS1, DS3,DS4, DS5 4 Wurth Elektronik 150120EVS75000 1206p LED GREEN SMDC1, C7, C9,C10 4 MURATA GRM188R71H104K 0603 Cap, .1UF, 50V, X7R, 10%, 0603 SMD C2, C5, C11 3 MURATA GRM21BR71C475KA73 0805 C_Chip_4.7uF_16V_X7R_0805 SMDC8 1 Vishay 293D106X9010B2TE3 B TANT CAP Cap, Tantalum 10uF 10V, CASE BC12 1 MURATA GRM21BR71H105KA12L 0805 Cap, Ceramic, 1uF 50V, X7R, 10% 0805 R1, R2 2 PANASONIC ERJ-3EKF22R0V 0603 Res 22 OHM 1% 0603 SMDR3 1 ROHM MCR03EZPFX1002 0603 RES 10K 1/10W 1% 0603R4, R5, R6 3 PANASONIC ERJ-3GEY0R00V 0603 Res 0 OHM 0603 SMDR7 1 PANASONIC ERJ-6ENF1001V 0805 RES 1K OHM 1/8W 5% 0805 SMDR10 1 PANASONIC ERJ-6GEYJ302V 0805 RES 3K OHM 1/8W 5% 0805 SMDR11, R12,R14, R15 4 PANASONIC ERJ-6GEYJ471V 0805 RES 470 OHM 1/8W 5% 0805R8, R20 2 PANASONIC ERJ-3EKF4701V 0603 RES 4.7K OHM 1/10W 1% 0603 SMDR18 1 PANASONIC ERJ-6GEY0R00V 0805 Res 0 OHM 0805 SMDR13, R16, R17 3 PANASONIC ERJ-3EKF2701V 0603 RES 2.7K OHM 1/10W 1% 0603 SMD KB1 1 PANASONIC ERJ-8GEY0R00V 1206 Res 0 OHM 1206 SMDJ1 1 Wurth Elektronik 65100516121 USB_B_mini CONN RECEPT MINIUSB R/A 5POS SMD JP1, JP4 2 Wurth Elektronik 61308021121 HDR2X5 CONN Header 5x2, 0.1 inchJP2, JP3 2 Wurth Elektronik 61304011121 HDR1X3 CONN HEADER 3POS 0.1 VERT GOLDT9, T10, T11,T12 4 TEST POINTEVALUATION BOARD LAYOUTDOCUMENT REVISION HISTORYRevision Date Description1.0.0 04/26/2016 Initial release of document1.0.110/23/2017Addition of clarifying statement that this XCM is for development purposes only and is not intended for production useBOARD REVISION HISTORYBoard RevisionDate Description2.0 Dec 2009Initial release of evaluation boardFOR FURTHER ASSISTANCEEmail: *************************************************Technical Documentation:/technical-documentationC ORPORATE H EADQUARTERS5966 La Place Court, Suite 100 Carlsbad, CA 92008 760.692.0711 p760.444.8598 f H IGH P ERFORMANCE A NALOG1060 Rincon CircleSan Jose, California 95131 USA 669.265.6100 p 669.265.6101 f NOTICEThe content of this document is furnished for informational use only, is subject to change without notice, and should not be construed as a commitment by MaxLinear, Inc.. MaxLinear, Inc. assumes no responsibility or liability for any errors or inaccuracies that may appear in the informational content contained in this guide. Complying with all applicable copyright laws is the responsibility of the user. Without limiting the rights under copyright, no part of this document may be reproduced into, stored in, or introduced into a retrieval system, or transmitted in any form or by any means (electronic, mechanical, photocopying, recording, or otherwise), or for any purpose, without the express written permission of MaxLinear, Inc.MaxLinear, Inc. may have patents, patent applications, trademarks, copyrights, or other intellectual property rights covering subject matter in this document. Except as expressly provided in any written license agreement from MaxLinear, Inc., the furnishing of this document does not give you any license to these patents, trademarks, copyrights, or other intellectual property.TrademarksCompany and product names may be registered trademarks or trademarks of the respective owners with which they are associated.Copyright© 2017 MaxLinear, Inc. All rights reserved.。
pix飞控全部参数表,自己编程
pix飞控全部参数表,自己编程摘要:1.Pix 飞控概述2.Pix 飞控的参数表3.编程方法与技巧4.总结正文:【Pix 飞控概述】Pix 飞控是一款应用于无人机、机器人等领域的飞行控制器,以其稳定性、可靠性和易用性受到广泛好评。
通过参数表,用户可以对Pix 飞控进行详细配置,以满足各种应用场景的需求。
【Pix 飞控的参数表】Pix 飞控的参数表包含众多选项,分为以下几个主要类别:1.飞行模式:包括手动模式、自动模式、定高模式等,用户可以根据实际需求进行选择。
2.控制通道:包括油门、方向、升降、副翼等,用户可以自定义控制通道的灵敏度和范围。
3.传感器:包括陀螺仪、加速度计、高度计、GPS 等,用户可以根据无人机的实际配置进行选择。
4.飞行算法:包括PID 控制、自适应控制等,用户可以根据无人机的飞行性能进行选择。
5.电子罗盘:包括校准、启用/禁用等,用户可以确保无人机的导航精度。
6.遥控器:包括遥控器类型、信号频率等,用户可以根据实际需求进行选择。
7.音频视频:包括音频输入/输出、视频输入/输出等,用户可以根据实际需求进行配置。
【编程方法与技巧】对于Pix 飞控的编程,用户需要掌握一定的编程基础。
根据实际需求,用户可以使用C 语言、Python 等编程语言进行开发。
在编程过程中,需要注意以下几点:1.熟悉Pix 飞控的硬件接口和通信协议,确保程序的正确性。
2.合理利用Pix 飞控提供的函数库,简化编程工作。
3.注意代码的结构和可读性,便于后期的维护和升级。
4.对无人机进行充分的测试,确保程序的稳定性和可靠性。
【总结】通过使用Pix 飞控的参数表和编程技巧,用户可以充分发挥无人机的性能,实现各种复杂的飞行任务。
x-tile原理
x-tile原理
x-tile是一款开源的Linux窗口管理器,它可以帮助用户自动排列桌面上的窗口,从而提高工作效率。
x-tile的原理是通过使用X11协议来控制窗口的位置和大小。
X11是一个用于Unix和类Unix系统的图形窗口系统,它可以让用户在图形界面下运行各种应用程序。
x-tile可以将桌面上的窗口分成几个区域,然后将每个窗口放置在对应的区域中。
用户可以选择不同的布局方式,如平铺、居中、对齐等。
x-tile还可以根据用
户的习惯自动调整窗口的位置和大小。
x-tile的工作原理非常简单。
当用户启动x-tile时,它会扫描当前桌面上的所有
窗口,并将它们分成不同的区域。
然后,x-tile将每个窗口放置在对应的区域中,
并根据用户的选择调整它们的位置和大小。
用户可以使用快捷键来切换不同的布局方式,或者手动调整窗口的位置和大小。
总之,x-tile是一款非常实用的Linux窗口管理器,它可以帮助用户更高效地管理桌面上的窗口。
它的工作原理非常简单,但是它的功能非常强大,可以让用户轻松地掌控自己的工作环境。
mission planner中文参数

这个参数设置最大允许的地速和空速差异. 这使得飞机能够应对失灵的空速 AHRS_WIND_MAX 0 米/秒 0 127 计. 0 值意味着飞机将直接使用读取到的空速,哪怕数据有异常. 这个参数控制罗盘和 GPS 在偏航上的参与度. 较大的数值会使得飞控在航向控 AHRS_YAW_P 0.2 0.1 0.4 制上更频繁地获取罗盘和 GPS 数据. 这个参数选择使用何种高度控制算法. 默认为 0, 自动设置最适应你的机架的 ALT_CTRL_ALG 0 0:自动 算法. 当前的默认值是使用 TECS (总能量控制系统). 未来我们会加入其它高 度控制算法,可以通过这个参数修改. 电传操控 B 模式(FBWB:Fly-by-Wire B)和巡航(CRUISE)模式允许的最小高度. ALT_HOLD_FBWCM 0 厘米 如果你试图降低至低于这个高度飞机将会拉平. 零值意味着没有此限制. 返航目标高度. 返航前飞行器将会爬升到这个高度并且悬停. 如果这个值是负 ALT_HOLD_RTL 10000 厘米 数(通常-1)则飞行器将会在执行返航时维持当前高度. 注意当经过接力点 (Ralley Point)时将用接力点高度替代 ALT_HOLD_RTL. GPS 高度和气压计高度的混合比率. 0 = 100% GPS, 1 = 100% 气压计. 强烈建 议你不要改动默认值 1, 因为 GPS 高度数据是出了名地不可靠. 只有一种情况 ALT_MIX 1 百分比 0 1 下我们建议你修改这个值, 就是当你拥有一个高空开启的 GPS, 例如你在离地几 千米的地方从气球上抛下一个飞机时. 这是在自动飞行模式下加入到目标高度数值的高度偏移量. 这可以用来在自动 ALT_OFFSET 0 米 -32767 32767 模式中加入全球高度偏移 ARMING_ACCTHRESH 0.75 0:无 1:全部选项 2:气 解锁电机前需要执行的检查. 这是一个在允许解锁操作前执行的位掩模操作. 压计 4:罗盘 8:GPS 16: 默认选项是不检查, 允许任意时刻解锁. 你可以通过把各项内容的编码求和来 ARMING_CHECK 1 惯导 32:参数 64:遥控 开启你想要的检查内容. 例如, 仅在拥有 GPS 锁定和人工遥控同时有效时允许 发射机 128:主板电压 解锁,则可以设置 ARMING_CHECK 为 72. 256:电池等级 ARMING_MIN_VOLT ARMING_MIN_VOLT2 0 0 除非达成一些条件否则禁止解锁. 若此项为 0 则无限制(立即解锁). 若为 1, 需要在电机解锁前方向舵掰杆或者地面站解锁, 并在解锁后输送 THR_MIN 的 PWM 0:禁用 1:解锁后油门 ARMING_REQUIRE 1 值到油门通道. 若为 2, 需要在电机解锁前方向舵掰杆或者地面站解锁, 并在
OpenX系列标准介绍(1):OpenDRIVE介绍
OpenX系列标准介绍(1):OpenDRIVE介绍“ 本系列尝试对ASAM OpenX系列标准进行介绍。
这是第一篇:介绍OpenDRIVE地图数据格式所能描述的内容和思路。
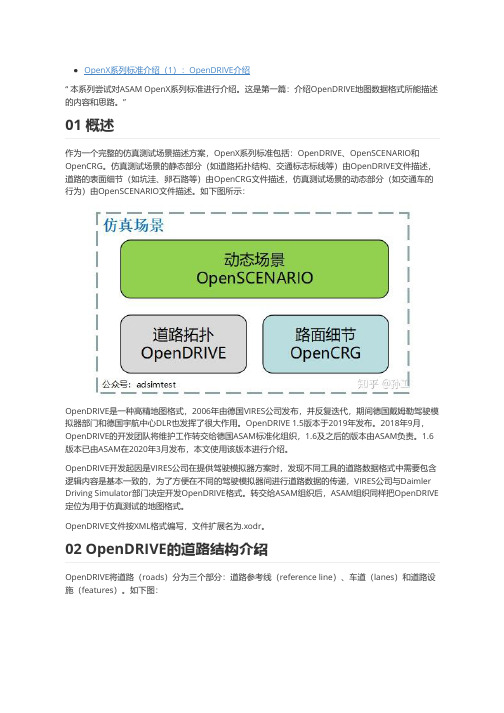
”01 概述作为一个完整的仿真测试场景描述方案,OpenX系列标准包括:OpenDRIVE、OpenSCENARIO和OpenCRG。
仿真测试场景的静态部分(如道路拓扑结构、交通标志标线等)由OpenDRIVE文件描述,道路的表面细节(如坑洼、卵石路等)由OpenCRG文件描述,仿真测试场景的动态部分(如交通车的行为)由OpenSCENARIO文件描述。
如下图所示:OpenDRIVE是一种高精地图格式,2006年由德国VIRES公司发布,并反复迭代,期间德国戴姆勒驾驶模拟器部门和德国宇航中心DLR也发挥了很大作用。
OpenDRIVE 1.5版本于2019年发布。
2018年9月,OpenDRIVE的开发团队将维护工作转交给德国ASAM标准化组织,1.6及之后的版本由ASAM负责。
1.6版本已由ASAM在2020年3月发布,本文使用该版本进行介绍。
OpenDRIVE开发起因是VIRES公司在提供驾驶模拟器方案时,发现不同工具的道路数据格式中需要包含逻辑内容是基本一致的,为了方便在不同的驾驶模拟器间进行道路数据的传递,VIRES公司与Daimler Driving Simulator部门决定开发OpenDRIVE格式。
转交给ASAM组织后,ASAM组织同样把OpenDRIVE 定位为用于仿真测试的地图格式。
OpenDRIVE文件按XML格式编写,文件扩展名为.xodr。
02 OpenDRIVE的道路结构介绍OpenDRIVE将道路(roads)分为三个部分:道路参考线(reference line)、车道(lanes)和道路设施(features)。
如下图:除此以外,还可以设置道路的高度(elevation),对于多条道路汇聚的位置需要用路口(junctions)来描述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内部公开,未经许可不得扩散文件编号:Xplanner操作手册版本:1.0发布日期:2010-12-16实施日期:修订记录集群软件修订记录 (2)XPLANNER简介 (4)一、公司研发类项目XP LANNER初始设定要求 (4)二、项目组各成员使用过程及要求 (4)三、项目组负责人利用XP LANNER对项目进行持续进度跟踪管理过程 (6)登录 (8)一、OA集成登录 (8)二、正常登录 (8)三、用户名密码 (8)常用操作 (9)一、创建项目 (9)二、手动添加人员,导入人员、将已有人员移到指定项目中 (11)三、创建S TORY与T ASK (12)XPlanner简介XPlanner 是一个基于Web的XP团队计划和跟踪工具。
XP的开发概念如iteration、user stories 等,XPlanner都提供了相对应的的管理工具,XPlanner支持XP开发流程,并解决利用XP 思想来开发项目所碰到的问题。
XPlanner特点包括:简单的模型规划,虚拟笔记卡(Virtual note cards),iterations、user stories 与工作记录的追踪,未完成stories将自动迭代,工作时间追踪,生成团队效率,个人工时报表。
一、公司研发类项目XPlanner初始设定要求1.根据项目类型不同分为两种类型对项目在XPlanner上进行初始设定:对于定制开发类项目,以实际项目名称作为XPlanner的项目名称。
在项目下建立首次迭代,制定迭代起止时间。
根据公司目前项目情况,建议每次迭代过程不要超过一个月。
在制定首次迭代后制定至少一个User Story;在User Story中至少制定一个任务。
对于短期实施类项目,以实际项目名称作为XPlanner的项目名称。
一般一次迭代应该完成此项目。
2.在XPlanner内建立人员列表包括:公司研发部人员(项目经理设为管理员权限、其他开发人员为编辑者权限)公司其他部门项目人员,包括项目助理或可以作为项目跟踪者的市场部门人员或者公司管理者客户:可以作为项目客户或跟踪者其他访问者:可看到该项目进展情况的访客。
设为访客二、项目组各成员使用过程及要求1.项目负责人:鉴于目前XPlanner仅适用于软件研发类项目适用,所以定为研发部项目负责人为XPlanner项目管理员。
项目负责人主要负责XPlanner中项目、迭代、User Story、任务的设置、编辑、删除。
项目管理员也可后续由项目助理担任作为执行人和跟踪者。
对于项目负责人应该:在启动新项目前依据《软件项目开发计划》在XPlanner上加入新项目,要对本项目目标加以简要说明。
将《软件项目开发计划》附加入"备注/附件"按照《软件项目开发计划》细分出本次迭代,订立迭代目标、迭代周期、完成的User Story、涉及人员、迭代完成评定标准。
形成《软件项目迭代计划》(格式附后)提交审批。
要求可度量的明确的迭代目标是《软件项目迭代计划》的重要内容之一。
按照迭代目标、迭代周期、涉及人员制定任务草稿,提交《迭代会议》讨论。
招集相关人员召开《迭代会议》通告《软件项目迭代计划》即迭代目标、迭代周期、完成的User Story、迭代完成评定标准。
并对任务草稿进行讨论,制定出确定的任务列表。
填入《软件项目迭代计划》。
按照《软件项目迭代计划》在XPlanner上添加相应的迭代、完成的User Story、任务。
正式启动本次迭代如果项目负责人是跟踪者角色,需随时在"我的资料"界面跟踪迭代执行情况。
迭代时间要求不允许调整。
User Story可以变更、增加、编辑、删除或调整、延续到后续迭代中去,任务也可以变更、增加、编辑、删除或调整、延续到其他User Story中去,但需要开会讨论决定。
任务里的评估工时是XP开发方式的重点控制内容。
一般不允许调整(通过对评估工时和实际工时的比对可以统计精确度)。
要及时督促项目研发人员添加、更新XPlanner上各角色负责的内容,做到每日下班前打开XPlanner监控项目进行情况。
本次迭代完成后按照《利用XPlanner对项目进行持续进度跟踪管理》的要求作出简要的《软件项目迭代总结》2.编辑者:定为本项目的研发人员、软件测试人员。
要求对于本项目的研发人员应该:参加《迭代会议》,充分了解《软件项目迭代计划》即迭代目标、迭代周期、完成的User Story、迭代完成评定标准。
并对任务草稿进行讨论。
接受自己部份的任务列表,对任务内涵要求有清晰明确的认识。
要求每日在"我的资料"界面相应的任务列表内的"操作"表型图标上进入"编辑任务时间"界面,填写本日此任务工时。
在"编辑任务时间"页面中的操作应实时进行,要填写开始时间和结束时间。
要求格式为时间格式: YYYY-MM-DD HH:MM。
对于需求设计任务主要是以模块功能描述的方式说明,完成识别就是完成此User Story某部份的设计实现方案,必须有设计输出。
对于开发类项目任务主要是以功能描述的方式说明,完成识别就是完成此功能描述地实现代码。
对于测试类任务主要是以测试用例列表或模块说明,完成识别就是完成此测试用例列表,或模块的全部业务路径,输出BUG单。
对于Overhead (整合、管理)类任务主要是以工作内容说明,完成识别就是完成工作说明的内容。
在"我的资料"界面下部"时间表"操作进入"时间表",此界面可统计本人的时间累计工时情况。
作为个人时间管理参考。
如果实际某任务工时累计超过了评估工时,将会显示"实际的工作时间已经超过了当前任务的评估工时.请进行新的任务评估以便于XPlanner 的状态视图可以更精确."信息。
此时可以按实际工时数调整原有的评估工时。
新的评估工时与原有评估工时在"精确度"界面有显示。
对于此类情况要求随着评估工时的准确程度提高而减少。
当任务完成后从"我的资料"界面相应的任务列表内的任务可进入任务管理界面,点击完成任务可以结束此任务。
表示此任务已完成。
3.User Story跟踪者:一般就是项目负责人,也可以是由项目助理担任作为执行人。
如果是客户直接参与研发,也可以是客户本身。
可在"我的资料"界面跟踪迭代执行情况。
可及时和项目组沟通。
可配合督促项目相关人员添加、更新XPlanner上各角色负责的内容,做到每日下班前打开XPlanner监控项目进行情况。
4.客户:可以是本公司市场部门相关人员,如果是客户直接参与研发,也可以是客户本身。
可在"我的资料"界面跟踪迭代执行情况。
三、项目组负责人利用XPlanner对项目进行持续进度跟踪管理过程1.在项目一次迭代完成后要求对迭代过程进行总结。
主要内容有:按照《软件项目迭代计划》总结迭代目标、迭代周期、涉及人员任务完成情况。
总结迭代目标达成情况,按照即定评定标准得出符合迭代目标程度。
总结本次迭代调整情况,找出调整原因。
逐步减少调整。
在统计表上得出本次迭代趋势。
召开《迭代会议》作出简要的《软件项目迭代总结》(可以和下次迭代会议合并召开)如果是项目软件、系统交付迭代,还需其他相关人员参加《迭代会议》,以说明刚完成的迭代输出的详细情况。
本项目全部迭代完成后向质控部门提交项目完成报告。
内含此项目的质量目标总结统计。
目前项目完成状态,客户投诉解决状态。
项目负责人负责各次《软件项目迭代计划》、《软件项目迭代总结》质量记录的保存。
并定期提交归档。
2.主要统计分析界面说明:时间表:总体时间表可以通过设定时间区段、包含人员条件统计:实际工时按项目(按项目种类在此时间区段的实际工时分类比例);实际工时按迭代(按迭代种类在此时间区段的实际工时分类比例);实际工时按用户需求User Story(按User Story种类在此时间区段的实际工时分类比例);个人时间表可以通过设定时间区段统计本人:时间区段内每日实际工时;实际工时按项目(按项目种类在此时间区段的实际工时分类比例);实际工时按迭代(按迭代种类在此时间区段的实际工时分类比例);实际工时按用户需求User Story(按User Story 种类在此时间区段的实际工时分类比例);User Story主界面:列出该迭代下所有的User Story,所有User Story的合计评估工时(当前评估),实际完成,剩余工时合计。
列表中显示所有的User Story的分类合计,可以点击列表头排序相应列(其他列表同此)。
Progress条棒显示完成比例。
度量界面:在某迭代时间区段内人员的工时情况统计。
上表显示时间区段内人员的实际工时排列(按降序)。
下表(开发人员平均有效工时)显示在某迭代时间区段内评估工时(当前评估)按人员排列(按降序)。
如果在"编辑任务时间"界面填写时间时填入结对开发人员,则条棒区分显示。
精确度界面:表头列出:当前评估工时(括号内为原始评估工时:创建任务时首次填入),实际完成工时,剩余工时(当前评估工时-实际完成工时)。
列表依次为:User Story名称;优先级;此任务完成工时;当前评估工时;原始评估工时;符合度(此任务完成工时-原始评估工时)/ 原始评估工时*100%;原始评估工时与当前评估工时比例;此任务完成工时与原始评估工时比例;此任务完成工时与当前评估工时比例;统计界面:人员利用率表(缺省不使用)。
迭代进度表:横轴为迭代时间区段,纵轴为工时量(长度自适应);红线为当前评估工时,蓝线为实际完成工时。
Burn Down Chart剩余工时表:横轴为迭代时间区段,纵轴为工时量(长度自适应);红线为本节点剩余工时合计。
此二表由后台时间触发引擎Quartz自动按照设定Quartz Configuration项触发执行填入数据。
登录一、OA集成登录OA首页链接二、正常登录地址:http://192.168.1.207:7070/三、用户名密码用户名:中文名字(与OA一致)如:王婷婷初始密码:111111常用操作一、创建项目:初次登陆xplanner,要先创建相应的项目,只授权系统管理员创建项目,创建完项目依次创建iteration、story、task.。
图1-1 创建project图1-2 创建iteration图1-3 添加笔记或附件至iteration说明:iteration、story、task具有编辑者权限都可以创建。
二、手动添加人员,导入人员、将已有人员移到指定项目中:此操作只有系统管理员或管理者才有此权限进行操作。