图像边缘检测算法代码7
canny边缘检测matlab代码
canny边缘检测matlab代码Canny边缘检测是一种常用的图像处理算法,它可以有效地检测图像中的边缘,并将其显示为白色线条。
在Matlab中,可以使用以下代码实现Canny边缘检测:1. 读取图像首先,需要读取待处理的图像。
可以使用imread函数来读取图片:```matlabimg = imread('image.jpg');```其中,image.jpg是待处理的图片文件名。
2. 灰度化Canny算法只能处理灰度图像,因此需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数来实现:```matlabgray_img = rgb2gray(img);```3. 高斯滤波在进行边缘检测之前,需要对图像进行高斯滤波来消除噪声。
可以使用fspecial和imfilter函数来实现:```matlabgaussian_filter = fspecial('gaussian', [5 5], 1);blur_img = imfilter(gray_img, gaussian_filter, 'replicate');```其中,[5 5]表示高斯核的大小为5x5,1表示标准差。
4. 计算梯度幅值和方向接下来,需要计算每个像素点的梯度幅值和方向。
可以使用Sobel算子来计算梯度,并利用arctan函数计算方向角度:```matlabsobel_x = [-1 0 1; -2 0 2; -1 0 1];sobel_y = [-1 -2 -1; 0 0 0; 1 2 1];grad_x = imfilter(blur_img, sobel_x, 'replicate');grad_y = imfilter(blur_img, sobel_y, 'replicate');grad_mag = sqrt(grad_x.^2 + grad_y.^2);grad_dir = atan(grad_y ./ grad_x);```5. 非极大值抑制由于Sobel算子计算出的梯度幅值可能会有多个峰值,因此需要进行非极大值抑制来保留边缘。
图像处理中的边缘检测算法分析与优化

图像处理中的边缘检测算法分析与优化随着数字图像处理技术的不断发展,边缘检测在计算机视觉、模式识别和图像分割等领域中扮演着重要的角色。
边缘是图像中灰度变化较大的区域,通过检测边缘,我们可以提取图像的形状和结构信息,从而实现图像分析和理解。
本文将对常用的图像处理边缘检测算法进行分析,并探讨优化策略。
一、边缘检测算法概述1.1 Sobel算法Sobel算法是一种基于梯度的边缘检测算法,它通过计算图像梯度的大小和方向来确定边缘位置。
Sobel算法具有计算简单、鲁棒性较高的优点,但对噪声比较敏感,在图像边缘不够明显或存在噪声时容易引入误检。
1.2 Canny算法Canny算法是一种经典的边缘检测算法,它通过多个步骤来实现高效的边缘检测。
首先,通过高斯滤波器对图像进行平滑处理,以减少噪声的影响。
然后,计算图像的梯度幅值和方向,并进行非极大值抑制,以精确地定位边缘。
最后,通过滞后阈值法来进行边缘的连接和细化。
Canny算法具有良好的边缘定位能力和抗噪能力,在实际应用中被广泛使用。
1.3 Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算子,它通过计算图像的二阶导数来检测图像中的边缘。
Laplacian算子具有对灰度变化较大的边缘敏感的优点,但对噪声比较敏感,容易产生边缘断裂和误检。
为了提高Laplacian算子的效果,常常与高斯滤波器结合使用,以减少噪声的干扰。
二、边缘检测算法优化2.1 参数选择在边缘检测算法中,参数的选择对于最终的结果具有重要的影响。
例如,对于Canny算法来说,高斯滤波器的大小和标准差的选择直接影响到边缘的平滑程度和定位精度。
因此,在优化边缘检测算法时,需要根据具体的应用场景和图像特点选择合适的参数。
2.2 非极大值抑制非极大值抑制是Canny算法中的一种重要步骤,用于精确地定位边缘位置。
然而,在进行非极大值抑制时,会产生边缘断裂和不连续的问题。
为了解决这个问题,可以考虑使用像素邻域信息进行插值,从而减少边缘的断裂,并得到更连续的边缘。
几种常用边缘检测算法的比较

几种常用边缘检测算法的比较边缘检测是在数字图像上寻找图像亮度变化的过程,它对于图像处理和计算机视觉任务非常重要。
常见的边缘检测算法有Sobel算子、Prewitt算子、Roberts算子和Canny边缘检测算法。
本文将对这几种算法进行比较。
1. Sobel算子:Sobel算子是一种常见的边缘检测算法,它通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Sobel算子具有简单、快速的优点,可以检测水平和垂直方向的边缘,但对于斜向边缘检测效果较差。
2. Prewitt算子:Prewitt算子也是一种常用的边缘检测算法,它类似于Sobel算子,通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Prewitt算子可以检测水平、垂直和斜向边缘,但对于斜向边缘的检测结果可能不够精确。
3. Roberts算子:Roberts算子是一种简单的边缘检测算法,它通过计算图像像素点与其对角线方向上的邻域像素点之间的差异来检测边缘。
Roberts算子计算简单,但对于噪声敏感,容易产生干扰边缘。
4. Canny边缘检测算法:Canny边缘检测算法是一种经典的边缘检测算法,它包含多个步骤:高斯滤波、计算梯度、非最大抑制和双阈值处理。
Canny算法具有良好的边缘定位能力,并且对于噪声和细节边缘具有较好的抑制效果。
但Canny算法计算复杂度较高,在处理大规模图像时可能较慢。
综上所述,不同的边缘检测算法具有各自的优缺点。
若要选择适合应用的算法,需要综合考虑图像特点、计算复杂度和应用需求等因素。
如果对图像边缘的方向要求不高,可以选择Sobel或Prewitt算子;如果对图像边缘的方向要求较高,可以选择Canny算法。
另外,为了获得更好的边缘检测结果,通常需要进行适当的预处理,如灰度化、滤波和阈值处理等。
最后,对于不同的应用场景,可能需要使用不同的算法或算法组合来满足特定需求。
图像边缘检测及提取,分水岭算法
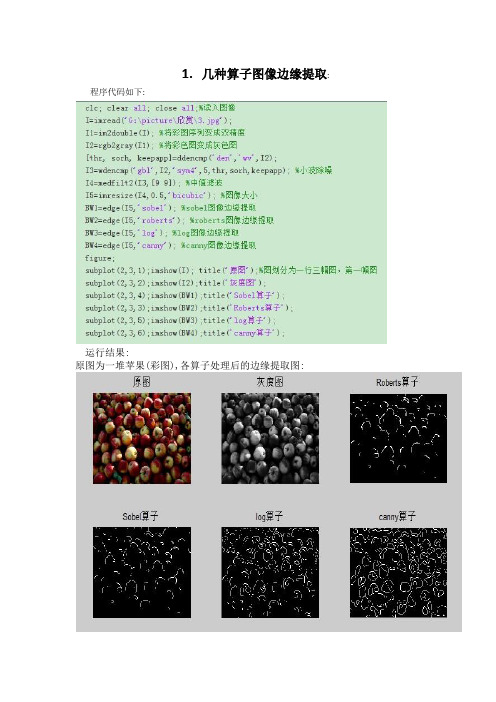
1.几种算子图像边缘提取:程序代码如下:运行结果:原图为一堆苹果(彩图),各算子处理后的边缘提取图:分水岭算法实现:a.直接对图像进行分水岭算法处理代码如下:(原图还是上题一堆苹果)运行结果如右图:很明显,属于过度分割了。
下面有改进算法:b.改进算法代码如下:实现包括下列步骤:(1)读图像。
读入图像(2)对比度最大化。
注意到图像中有许多彼此连通的不同大小的对象。
为使通过watershed变换找到的低谷数目最小,我们使感兴趣的对象的对比度达到最大。
对比度增强的一个常用的技术是综合应用top—hat和bottom—hat变换。
top—hat变换定义为原图像和它的开之差。
图像的开是一与特定结构元素匹配的图像前景部分的集合。
bottom—hat变换定义为在原图像和它的闭之间的差。
图像的闭是一与特定结构元素匹配的图像背景的集合。
通用的结构元素是正方形,长方形,圆盘,菱形,球和线。
既然图像中我们感兴趣的目标对象看起来像圆盘,我们用strel函数建立一个半径为15个像素的圆盘形结构元素。
这个圆盘尺度是图像中的目标对象的平均半径的一个估计。
(3)图像相加减。
为使目标对象与分隔它们的间隙之间的对比达到最大,用“原图top—hat图像+bottom—hat图像”得到增强的结果图。
(4)转换感兴趣的对象。
调用watershed变换找出图像的亮度”低谷”,把imcomplement作用增强过的图像上,将感兴趣的目标对象转换为亮度低谷,得到增强图的补图。
(5)检测亮度低谷。
对所得补图运用imextendedmin函数检测低于某特别阈值的所有亮度低谷。
imextendedmin函数的输出是一个二值(逻辑值)图像。
二值图像中重要的是区域的位置而非区域的大小。
用imimposemin函数把补图改为只含有那些由imtendedmin函数找到的低谷,并将低谷的像素值变为O(8位图像可能的深谷)。
(6)watershed分割。
通过watershed变换,可找出来所有含有强加给最小值的区域。
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
毕业设计论文-基于蚁群算法的图像边缘检测-附代码
毕业设计论文-基于蚁群算法的图像边缘检测-附代码上海工程技术大学毕业设计(论文) 基于蚁群算法的图像边缘检测目录摘要 ...............................................................1 ABSTRACT .............................................................2 1 绪论 (3)1.1 研究背景 ...........................................................31.2 研究现状和发展方向 (4)6 1.3 研究目的和意义 .....................................................2 图像边缘检测概述 ..................................................... 7 2.1 边缘的定义及类型 ................................................... 8 2.2 常用的边缘检测方法 (10)2.3 其他边缘检测方法 .................................................. 15 2.3.1 基于小波变换的边缘检测 .......................................... 15 2.3.2 基于数学形态学的边缘检测 (16)17 2.4 传统边缘检测的不足 ................................................3 蚁群算法 ............................................................ 17 3.1蚁群算法的基本原理 (18)3.2 基于蚁群算法的图像边缘检测 ........................................21 4 实验结果及分析 ...................................................... 22 4.1 基于蚁群算法的图像边缘检测流程 .................................... 22 4.2 实验结果与性能分析 (26)4.2.1 参数对边缘检测的影响 ............................................ 294.2.2 与传统方法的比较 ................................................ 35 5 总结与展望 .......................................................... 37 参考文献 .............................................................. 39 附录 ................................................. 错误~未定义书签。
sobel边缘检测算法代码python

sobel边缘检测算法代码python Sobel边缘检测算法是一种常用的数字图像处理方法,用于在图像中检测出边界。
其原理是利用图像灰度值的变化来确定图像边缘的位置。
Sobel算法是一种简单而有效的边缘检测算法,可以在Python中快速实现。
Sobel算法的本质可以视为一种滤波器。
它使用一组水平和垂直的像素值累加器,将卷积运算应用于图像中的像素。
该算法对像素值的变化率进行计算,就可以检测出物体的边缘。
通常,Sobel算法用于物体边缘和轮廓的识别,通过滤波器之后,灰度值大的像素就会变得更加亮,而灰度值低的像素则会变得更加暗。
Python中Sobel算法的实现相对简单,以下是一个基本步骤:1.导入必要库:opencv-python, numpy``` import cv2 import numpy as np ```2.读取图像文件并转换成灰度图``` img = cv2.imread('path/to/image',cv2.IMREAD_GRAYSCALE) ```3.应用Sobel算子:可以应用两个权重矩阵,分别代表水平和垂直方向的边缘变化。
可以使用OpenCV的cv2.Sobel()函数来进行计算,其中参数1代表应用的输入图像,参数2代表深度,通常值为-1,参数3和参数4代表权重矩阵。
``` sobelHorizontal = cv2.Sobel(img,cv2.CV_64F, 1, 0) ``` ``` sobelVertical =cv2.Sobel(img, cv2.CV_64F, 0, 1) ```4.以合适的形式呈现边缘图像:边缘检测图像通常需要处理掉噪声,并调整颜色和对比度。
这一步骤有多种方式实现,例如使用cv2.convertScaleAbs()函数将数据类型转换为8位无符号整数,并将其转换为灰度格式的边缘图像。
``` magnitudeImage =cv2.convertScaleAbs(np.sqrt(np.power(sobelHorizonta l, 2) + np.power(sobelVertical, 2))) ```以上是一个基本的代码实现,可以生成一张带有高亮边缘的图像。
图像边缘检测算子
图像边缘检测算子图像边缘检测算子是一种用来检测图像中边缘的算法,在图像处理中是一项基本技术,其在三维重建、识别、检测、增强、跟踪等方面发挥着重要作用。
这种算法可以用来寻找图像中对象的轮廓和细微结构,改善图像的质量,为后续图像处理提供有效的前提条件。
边缘检测算子的基本思想是通过检测图像的梯度信息,来判断图像中的物体边缘,从而可以提取出物体的边缘,并实现物体边缘的检测和特征量化。
主要有锐化算子、滤波算子、统计算子和结构运算算子等类型,其中锐化算子是最常用的。
锐化算子是图像边缘检测算子中最为重要的一类,它通过对图像进行卷积,将图像中的梯度信息提取出来,并根据梯度信息计算像素值的改变,从而实现物体边缘的检测。
其中常用的算子有Sobel算子、Prewitt算子和Robert算子等,这些算子可以检测到图像中不同方向的边缘,并可以根据不同的方法进行加强。
此外,滤波算子也是一类重要的边缘检测算子,它们可以改善图像的质量并减少噪声信息,其中最常用的是高斯滤波算子,它可以降低图像中的噪声并在不改变原始图像的前提下改善图像的质量。
统计算子是另一类比较常用的边缘检测算子,它们可以利用彩色图像的多个通道的像素信息来检测边缘,比如局部均值算子、局部方差算子和平均灰度值算子等,它们可以抑制噪声对边缘检测的影响。
最后,结构运算算子是另一类重要的边缘检测算子,它们主要利用形态学运算,如腐蚀和膨胀来检测图像中的边缘,其中最常用的是拉普拉斯算子,它可以检测图像中物体的边界和细微结构。
综上所述,图像边缘检测算子是图像处理的一个重要基础技术,它可以检测图像中的边缘,为后续的图像处理提供有效的前提条件。
主要有锐化算子、滤波算子、统计算子和结构运算算子等类型,它们可以改善图像的质量,从而实现物体边缘的检测和特征量化。
图像的边缘检测实验报告

图像的边缘检测实验报告
《图像的边缘检测实验报告》
图像的边缘检测是计算机视觉领域中的重要技术之一,它可以帮助我们识别图
像中物体的边缘和轮廓,从而实现图像分割、特征提取和目标识别等应用。
在
本次实验中,我们将对几种常用的边缘检测算法进行比较和分析,以评估它们
在不同场景下的性能和适用性。
首先,我们使用了Sobel算子进行边缘检测。
Sobel算子是一种基于梯度的边缘检测方法,它通过对图像进行卷积操作来寻找像素值变化最大的地方,从而找
到图像中的边缘。
实验结果显示,Sobel算子在一些简单场景下表现良好,但
在复杂背景和噪声干扰较大的情况下效果不佳。
接着,我们尝试了Canny边缘检测算法。
Canny算法是一种多阶段的边缘检测
方法,它通过对图像进行高斯滤波、计算梯度、非极大值抑制和双阈值处理等
步骤来检测图像中的边缘。
实验结果显示,Canny算法在复杂场景下表现出色,能够有效地抑制噪声并找到图像中的真实边缘。
最后,我们还尝试了Laplacian算子和Prewitt算子等其他边缘检测算法,并对
它们的性能进行了比较和分析。
实验结果显示,不同的边缘检测算法在不同场
景下表现出各自的优势和劣势,需要根据具体的应用需求来选择合适的算法。
总的来说,本次实验对图像的边缘检测算法进行了全面的比较和分析,为我们
进一步深入理解和应用这些算法提供了重要的参考和指导。
希望通过这些实验
结果,我们能够更好地利用边缘检测技术来解决实际的图像处理问题,为计算
机视觉领域的发展做出更大的贡献。
matlab边缘检测代码
MATLAB边缘检测代码边缘检测是图像处理中常用的技术,用于识别图像中物体的轮廓。
在MATLAB中,我们可以使用不同的方法进行边缘检测,例如Sobel算子、Canny算子等。
本文将介绍MATLAB中常用的边缘检测方法,并给出相应的代码示例。
1. Sobel算子Sobel算子是一种基于梯度的边缘检测算法,通过计算图像灰度值的一阶导数来识别边缘。
在MATLAB中,我们可以使用edge函数来实现Sobel算子。
img = imread('image.jpg'); % 读取图像gray_img = rgb2gray(img); % 将彩色图像转换为灰度图像edge_img = edge(gray_img, 'sobel'); % 使用Sobel算子进行边缘检测imshow(edge_img); % 显示结果上述代码首先读取一张彩色图像,并将其转换为灰度图像。
然后使用edge函数对灰度图像进行Sobel边缘检测,并将结果显示出来。
2. Canny算子Canny算子是一种基于多阶段处理的边缘检测算法,它能够有效地抑制噪声并提取出清晰、准确的边缘。
在MATLAB中,我们同样可以使用edge函数来实现Canny算子。
img = imread('image.jpg'); % 读取图像gray_img = rgb2gray(img); % 将彩色图像转换为灰度图像edge_img = edge(gray_img, 'canny'); % 使用Canny算子进行边缘检测imshow(edge_img); % 显示结果上述代码与Sobel算子的示例代码类似,只是将edge函数的第二个参数设置为'canny'来使用Canny算子进行边缘检测。
3. Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算法,它能够检测出图像中的灰度变化区域。
matlab边缘检测算法
Matlab提供了多种用于边缘检测的算法和函数。
以下是一些常用的Matlab边缘检测算法:Canny边缘检测算法:Canny算法是一种经典的边缘检测算法,具有良好的边缘定位和低误报率。
在Matlab中,可以使用edge函数进行Canny边缘检测,例如:matlabCopy codeI = imread('image.jpg');edgeImg = edge(I, 'Canny');imshow(edgeImg);Sobel算子:Sobel算子是一种基于梯度的边缘检测算子,常用于提取图像中的水平和垂直边缘。
在Matlab中,可以使用edge函数进行Sobel边缘检测,例如:matlabCopy codeI = imread('image.jpg');edgeImg = edge(I, 'Sobel');imshow(edgeImg);Prewitt算子:Prewitt算子也是一种基于梯度的边缘检测算子,类似于Sobel算子,但略有不同。
在Matlab中,可以使用edge函数进行Prewitt边缘检测,例如:matlabCopy codeI = imread('image.jpg');edgeImg = edge(I, 'Prewitt');imshow(edgeImg);Laplacian算子:Laplacian算子是一种基于二阶导数的边缘检测算子,可以检测图像中的边缘和纹理变化。
在Matlab中,可以使用edge函数进行Laplacian边缘检测,例如:matlabCopy codeI = imread('image.jpg');edgeImg = edge(I, 'log');imshow(edgeImg);以上只是一些常用的Matlab边缘检测算法示例。
除了这些算法,Matlab还提供了其他边缘检测算法和函数,如Roberts算子、LoG算子等。
边缘检测 常用 算法

边缘检测是计算机视觉和图像处理中的一项重要任务,它用于识别图像中物体的边界或不同区域之间的边缘。
边缘检测算法通过检测图像中像素强度的快速变化来工作。
以下是一些常用的边缘检测算法:Sobel算子:Sobel边缘检测算法是一种基于一阶导数的离散微分算子,它结合了高斯平滑和微分求导。
Sobel算子对噪声具有平滑作用,提供较为精确的边缘方向信息,但边缘定位精度不够高。
当对精度要求不是很高时,是一种较为常用的边缘检测方法。
Prewitt算子:Prewitt算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。
其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
Canny算子:Canny边缘检测算法是John F. Canny于1986年开发出来的一个多级边缘检测算法。
Canny的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:好的检测- 算法能够尽可能多地标识出图像中的实际边缘,漏检真实边缘的情况和误检非边缘轮廓的情况都最少。
Laplacian算子:Laplacian算子是一种二阶导数算子,具有旋转不变性,可以满足不同走向的图像边缘锐化要求。
通常其算子的系数之和需要为零。
由于拉普拉斯算子对噪声比较敏感,所以图像一般先经过平滑处理,因为平滑处理会用到拉普拉斯算子,所以通常将平滑处理的过程和拉普拉斯锐化处理的过程合并在一起做,此时平滑处理的滤波器又称为掩模。
Roberts算子:Roberts算子又称为交叉微分算法,它是基于2x2的邻域计算差分的方法。
Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。
这些算法各有优缺点,选择哪种算法取决于具体的应用场景和需求。
例如,Canny算子通常被认为是边缘检测的最优算法,但它在计算上可能比Sobel或Prewitt算子更复杂。
robert算子边缘检测matlab代码

robert算子边缘检测matlab代码罗伯特(Roberts)算子是一种边缘检测算子,用于检测图像中的边缘。
以下是一个简单的MATLAB代码示例,用于应用罗伯特算子进行边缘检测:```matlab%读取图像originalImage=imread('lena.jpg');%请替换成你的图像文件路径%将图像转换为灰度图grayImage=rgb2gray(originalImage);%罗伯特算子边缘检测robertsX=[10;0-1];robertsY=[01;-10];%使用卷积进行边缘检测edgeX=conv2(double(grayImage),robertsX,'same');edgeY=conv2(double(grayImage),robertsY,'same');%计算边缘强度edgeMagnitude=sqrt(edgeX.^2+edgeY.^2);%显示结果figure;subplot(2,2,1),imshow(originalImage),title('原始图像');subplot(2,2,2),imshow(grayImage),title('灰度图');subplot(2,2,3),imshow(edgeMagnitude,[]),title('罗伯特算子边缘检测结果');subplot(2,2,4),imshowpair(edgeX,edgeY,'montage'),title('X方向和Y方向边缘');%设置图像标题suptitle('罗伯特算子边缘检测');```请确保将`'lena.jpg'`替换为你实际使用的图像文件路径。
这个代码使用了罗伯特算子的卷积核进行水平(X方向)和垂直(Y方向)方向的边缘检测,然后计算了边缘强度,并显示了原始图像、灰度图和边缘检测结果。
图像处理中的边缘检测算法及其应用
图像处理中的边缘检测算法及其应用一、引言图像处理是指利用计算机对数字图像进行编辑、处理和分析的过程,具有广泛的应用领域。
在图像处理中,边缘检测是一项最为基础的任务,其目的是通过识别图像区域中像素强度突变处的变化来提取出图像中的边缘信息。
本文将介绍边缘检测算法的基本原理及其应用。
二、基本原理边缘是图像中像素值发生跳变的位置,例如黑色区域与白色区域的交界处就可以看作是一条边缘。
边缘检测的主要任务是将这些边缘信息提取出来。
边缘检测算法一般可以分为基于梯度的算法和基于二阶导数的算法。
其中基于梯度的算法主要包括Sobel算子、Prewitt算子和Canny算子;而基于二阶导数的算法主要包括Laplacian算子、LoG(Laplacian of Gaussian)算子和DoG(Difference of Gaussian)算子。
1.Sobel算子Sobel算子是一种常用的边缘检测算法,是一种基于梯度的算法。
该算法在x方向和y方向上都使用了3x3的卷积核,它们分别是:Kx = |-2 0 2|-1 0 1-1 -2 -1Ky = | 0 0 0|1 2 1Sobel算子的实现可以通过以下步骤:①将输入图像转为灰度图像;②根据以上卷积核计算x方向和y方向的梯度;③根据以下公式计算梯度幅值和方向:G = sqrt(Gx^2 + Gy^2) (梯度幅值)θ = atan(Gy/Gx) (梯度方向)其中Gx和Gy分别为x方向和y方向上的梯度。
可以看到,Sobel算子比较简单,对噪声具有一定的抑制作用,但是在边缘细节处理上不够精细。
2.Prewitt算子Prewitt算子也是一种基于梯度的边缘检测算法。
其卷积核如下: -1 0 1-1 0 1-1 -1 -1Ky = | 0 0 0|1 1 1实现方法与Sobel算子类似。
3.Canny算子Canny算子是一种基于梯度的边缘检测算法,是目前应用最广泛的边缘检测算法之一。
opencv——边缘检测算法(总结)

opencv——边缘检测算法(总结)前⾔耐⼼看完⼀定会有收获的,⼤部分内容也会在代码中体现,结合理论知识和代码进⾏理解会更有效。
代码⽤opencv4.5.1(c++)版实现⼀、边缘检测算法边缘检测算法是指利⽤灰度值的不连续性质,以灰度突变为基础分割出⽬标区域。
对铝铸件表⾯进⾏成像后会产⽣⼀些带缺陷的区域,这些区域的灰度值⽐较低,与背景图像相⽐在灰度上会有突变,这是由于这些区域对光线产⽣散射所引起的。
因此边缘检测算⼦可以⽤来对特征的提取。
1、⼀阶算⼦⼀种是基于⼀阶微分的算⼦,也称基于搜索的算⼦,⾸先通过⼀阶导数计算边缘强度,然后采⽤梯度的⽅向来对边缘的局部⽅向进⾏寻找,同时根据该⽅向来寻找出局部梯度模的最⼤值,由此定位边缘,如Roberts Cross算⼦,Prewitt算⼦Sobel算⼦,Kirsch算⼦,Canny算⼦,罗盘算⼦等;图像中的边缘区域,像素值会发⽣“跳跃”,对这些像素求导,在其⼀阶导数在边缘位置为极值,这就是Sobel算⼦使⽤的原理——极值处就是边缘。
2、⼆阶算⼦另⼀种是基于⼆阶微分的算⼦,也称基于零交叉的算⼦,通过寻找由图像得到的⼆阶导数的过零点来定位检测边缘,如Marr-Hildreth算⼦,Laplacian算⼦,LOG算⼦等。
如果对像素值求⼆阶导数,会发现边缘处的导数值为0。
⼆、⼀阶算⼦分析⼀阶微分算⼦进⾏边缘检测的思路⼤致就是通过指定⼤⼩的核(kernal)(也称为算⼦)与图像进⾏卷积,将得到的梯度进⾏平⽅和或者最⼤值作为新的梯度赋值给对应的像素点,不同的⼀阶微分算⼦主要的不同在于其算⼦即核的元素不同以及核的⼤⼩不⼀样以下是连续函数的⼀阶导数求导公式:因为图像是⼀个⾯,就相当于是灰度值关于x,y两个⽅向的函数,要求某⼀点的导数,则是各个⽅向的偏导数的平⽅和再进⾏开⽅运算。
离散函数的⼀阶导数公式:y'=[y(x0+h)-y(x0-h)]/(2h);这是⼀维函数的⼀阶求导,h是步长,在图像处理中⼀般为1⾸先复习⼀下什么是卷积?卷积就是对应的元素相乘再进⾏累加的过程实例图⽚:1、Roberts算⼦Robert算⼦是⽤于求解对⾓线⽅向的梯度,因为根据算⼦GX和GY的元素设置可以看到,只有对⾓线上的元素⾮零,其本质就是以对⾓线作为差分的⽅向来检测。
halcon中边缘 laplace算子

halcon中边缘 laplace算子Halcon中的边缘检测算法之Laplace算子引言:在图像处理领域,边缘检测是一项重要的任务。
它对于分割目标物体和背景,识别特定特征以及提取关键信息等都具有重要意义。
Halcon是一种强大的机器视觉软件工具,提供了多种边缘检测算法,其中Laplace算子是其中一种常用的方法。
本文将以Halcon中的Laplace算子为主题,介绍其原理、应用以及使用方法,并通过实例演示如何使用Laplace算子进行边缘检测。
第一部分:Laplace算子原理Laplace算子是一种二阶微分算子,用于检测图像中的边缘。
在Halcon中,Laplace算子通过计算图像中的像素值与其周围像素值之差来确定边缘的存在。
Laplace算子可以通过离散Laplace核或卷积核来实现。
Laplace算子的数学表达式如下:Δf = d²f/dx² + d²f/dy²其中Δf表示Laplace算子,而df/dx²和df/dy²分别表示图像在x和y方向上的二阶导数。
通过计算图像中每个像素的二阶导数,我们可以得到图像中每个像素点的Laplace值。
第二部分:Laplace算子应用Laplace算子在图像处理中具有广泛的应用。
其主要用途包括边缘检测、轮廓提取、纹理分析以及特征提取等等。
其中,边缘检测是Laplace算子最常见的应用之一。
边缘检测是图像处理领域的基础任务。
通过检测图像中的边缘,我们可以更好地理解图像中的结构,进而进行图像分割、目标识别等进一步的处理。
Laplace算子通过计算图像中像素的二阶导数来查找边缘的存在,因此可以高效地检测出图像中的边缘。
第三部分:Halcon中的Laplace算子在Halcon中,我们可以很方便地使用Laplace算子进行边缘检测。
Halcon提供了一系列的函数和操作符,可以快速而准确地实现Laplace边缘检测。
sobel边缘检测算法matlab代码

sobel边缘检测算法matlab代码以下是 Sobel 边缘检测算法的 MATLAB 代码实现:```matlab% Sobel 边缘检测算法 MATLAB 代码% 代码版权归作者所有,仅供学习使用,不得用于商业用途 % 设置参数n = 3; % 边缘检测次数m = 5; % 图像大小d = 1; % Sobel 算子步长sigma = 2; % 平滑处理参数threshold = 20; % 阈值% 读入图像img = imread("test.png");% 设置边缘方向dir1 = [-1 -1];dir2 = [1 1];% 计算 Sobel 算子sobel = zeros(n, n);for i = 1:nfor j = 1:ndx = dir1(i);dy = dir2(j);sobel(i, j) = abs(img(i+1, j+1) - img(i-1, j-1) +img(i+1, j) - img(i-1, j) -img(i+1, j+1) - img(i-1, j-1));endend% 平滑处理img_smooth = img;img_smooth = img_smooth / sigma;% 计算边缘border = 10;img_border = img_smooth(1:border:end, 1:border:end); img_border = img_border - img_smooth;img_border = img_border * (1 - sigma^2);img_border = img_border + img_smooth;edges = zeros(border, border);for i = 1:borderfor j = 1:borderif img_border(i, j) > thresholdedges(i, j) = 255;endendend% 显示结果imshow(edges);title("Sobel 边缘检测");```以上代码实现了 Sobel 边缘检测算法,其 MATLAB 输出结果为检测到的边缘图像。
opencv边缘检测算法c语言

边缘检测是计算机视觉和图像处理中的常见任务之一,用于检测图像中物体的边界或轮廓。
OpenCV(Open Source Computer Vision Library)提供了多种边缘检测算法,其中包括基于C 语言的实现。
在这里,我将介绍几种常见的OpenCV边缘检测算法的C语言实现。
### 1. Sobel算子边缘检测:Sobel算子是一种常见的边缘检测算子,它使用卷积操作对图像进行处理。
以下是使用OpenCV进行Sobel算子边缘检测的C语言示例:```c#include <opencv2/opencv.hpp>#include <opencv2/highgui/highgui_c.h>int main() {// 读取图像IplImage* image = cvLoadImage("your_image.jpg", CV_LOAD_IMAGE_GRAYSCALE);// 定义输出图像IplImage* edges = cvCreateImage(cvGetSize(image), IPL_DEPTH_8U, 1);// 使用Sobel算子进行边缘检测cvSobel(image, edges, 1, 0, 3); // 1表示对x方向求导数,0表示对y方向求导数,3表示Sobel核大小// 显示原始图像和边缘检测结果cvNamedWindow("Original Image", CV_WINDOW_AUTOSIZE);cvNamedWindow("Sobel Edges", CV_WINDOW_AUTOSIZE);cvShowImage("Original Image", image);cvShowImage("Sobel Edges", edges);cvWaitKey(0);// 释放内存cvReleaseImage(&image);cvReleaseImage(&edges);cvDestroyAllWindows();return 0;}```### 2. Canny边缘检测:Canny边缘检测是一种多阶段的边缘检测算法,包括高斯滤波、梯度计算、非极大值抑制和双阈值边缘跟踪。
cw算法代码

cw算法代码CW算法是一种用于图形图像处理的边缘检测算法,下面是一份C++实现的CW算法代码:```#include <iostream>#include <opencv2/opencv.hpp>using namespace std;using namespace cv;int main(int argc, char** argv){Mat src, gray_src, edge_cw;src = imread(argv[1]);// 将彩色图像转换为灰度图像cvtColor(src, gray_src, COLOR_BGR2GRAY);int height = src.rows;int width = src.cols;edge_cw = Mat::zeros(src.size(), CV_8UC1);// 定义3*3的模板int cw[3][3] = { { -1,-1,-1 },{ -1,8,-1 },{ -1,-1,-1 } }; // 计算边缘for (int i = 1; i < height - 1; i++){for (int j = 1; j < width - 1; j++){int temp = 0;for (int m = -1; m <= 1; m++){for (int n = -1; n <= 1; n++){temp += gray_src.at<uchar>(i + m, j + n)*cw[m + 1][n + 1]; }}edge_cw.at<uchar>(i, j) = saturate_cast<uchar>(temp);}}imshow('src', src);imshow('edge_cw', edge_cw);waitKey(0);return 0;}```代码中,首先通过OpenCV中的imread函数读取一张图像,然后将其转换为灰度图像。
边缘检测laplacian算法代码python
边缘检测laplacian算法代码python import numpy as npimport cv2def laplacian(img):# 转换为灰度图像gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 定义Laplacian算子laplacian_kernel = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]])# 对图像进行卷积laplacian = cv2.filter2D(gray, -1, laplacian_kernel)# 返回边缘检测结果return laplacian# 读取图像img = cv2.imread('image.jpg')# 调用Laplacian函数进行边缘检测edges = laplacian(img)# 显示原图像和边缘检测结果cv2.imshow('Original Image', img)cv2.imshow('Edge Detection', edges)cv2.waitKey(0)cv2.destroyAllWindows()在这个示例中,我们首先使用cv2.cvtColor函数将输入图像转换为灰度图像。
然后,我们定义了一个Laplacian算子,并使用cv2.filter2D函数对灰度图像进行卷积,得到Laplacian边缘检测结果。
最后,我们使用cv2.imshow函数显示原图像和边缘检测结果。
需要注意的是,Laplacian边缘检测算法可能会产生一些噪声和伪影,因此在实际应用中需要进行一些后处理,如中值滤波、高斯滤波等。
此外,Laplacian边缘检测算法对于不同图像的边缘检测效果可能会有所不同,需要根据具体情况进行调整和优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字图像处理技术课程设计图像边缘检测编程实现灰度图像的几种常用的边缘检测算法,包括:梯度边缘检测算法、Roberts边缘检测算法、Sobel边缘检测算法、拉普拉斯边缘检测算法、canny边缘检测算法、Prewitt边缘检测算法和Krisch边缘检测算法。
代码:头文件:++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ bmpFile.h#ifndef BMP_FILE_H#define BMP_FILE_HBYTE *Read8BitBmpFile2Img(const char *filename,int *width,int *height);bool Write8BitImg2BmpFile(BYTE *pImg,int width,int height,const char *filename);BYTE *Read24BitBmpFile2Img(const char *filename,int *width,int *height);bool Write24BitImg2BmpFile(BYTE *pImg,int width,int height,const char *filename);bool Robert(BYTE *pGryImg,int width,int height,int threshold);bool Sobel(BYTE *pGryImg,int width,int height,int threshold);bool Laplace(BYTE *pGryImg,int width,int height);bool Prewitt(BYTE *pGryImg,int width,int height,int threshold);bool Kirsch(BYTE *pGryImg,int width,int height,int threshold);#endif++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ Canny.hBYTE *Canny(BYTE *pGryImg,int width,int height,double sigma,double dRatioLow,double dRatioHigh,BYTE *dstImg);//dRatioHigh设置的值越高,检测出来的边缘点数目会越少++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ Gradient.hbool Gradient(BYTE *pGryImg,int width,int height,int threshold);++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++函数定义文件:bmpFile.cpp#include <windows.h>#include <stdio.h>#include <stdlib.h>#include <string.h>#include <math.h>#include <time.h>#define WIDTHBYTES(bits) (((bits)+31)/32*4)BYTE *Read8BitBmpFile2Img(const char* filename,int *width,int *height){FILE *BinFile;BITMAPFILEHEADER FileHeader;BITMAPINFOHEADER BmpHeader;BYTE *plmg;unsigned int size;int Suc=1,w,h;//open file*width=*height=0;if((BinFile=fopen(filename,"rb"))==NULL) return NULL;//read struct infoif(fread((void*)&FileHeader,1,sizeof(FileHeader),BinFile)!=sizeof(FileHeader)) Suc=-1;if(fread((void*)&BmpHeader,1,sizeof(BmpHeader),BinFile)!=sizeof(BmpHeader)) Suc=-1;if((Suc==-1)||(FileHeader.bfOffBits<sizeof(FileHeader)+sizeof(BmpHeader))){fclose(BinFile);return NULL;}//read Image data*width=w=BmpHeader.biWidth;*height=h=BmpHeader.biHeight;size=w*h;fseek(BinFile,FileHeader.bfOffBits,SEEK_SET);if((plmg=new BYTE[size])!=NULL){for(int i=0;i<h;i++) //0,1,2,3,4(5);400-499{if(fread(plmg+(h-1-i)*w,sizeof(BYTE),w,BinFile)!=w){fclose(BinFile);delete plmg;plmg=NULL;return NULL;}fseek(BinFile,(w+3)/4*4-w,SEEK_CUR);}}fclose(BinFile);return plmg;}bool Write8BitImg2BmpFile(BYTE *pImg,int width,int height,const char* filename)//当宽度不是4的倍数时自动添加成4的倍数{FILE *BinFile;BITMAPFILEHEADER FileHeader;BITMAPINFOHEADER BmpHeader;int i,extend;bool Suc=true;BYTE p[4],*pCur;//Open Fileif((BinFile=fopen(filename,"w+b"))==NULL) { return false;}//Fill the FileHeaderFileHeader.bfType=((WORD)('M'<<8)|'B');FileHeader.bfOffBits=sizeof(BITMAPFILEHEADER)+sizeof(BITMAPINFOHEADER)+25 6*4L;FileHeader.bfSize=FileHeader.bfOffBits+width*height;FileHeader.bfReserved1=0;FileHeader.bfReserved2=0;if(fwrite((void*)&FileHeader,1,sizeof(FileHeader),BinFile)!=sizeof(FileHeader)) Suc=false;//Fill the ImgHeaderBmpHeader.biSize=40;BmpHeader.biWidth=width;BmpHeader.biHeight=height;BmpHeader.biPlanes=1;BmpHeader.biBitCount=8;BmpHeader.biCompression=0;BmpHeader.biSizeImage=0;BmpHeader.biXPelsPerMeter=0;BmpHeader.biYPelsPerMeter=0;BmpHeader.biClrUsed=0;BmpHeader.biClrImportant=0;if(fwrite((void*)&BmpHeader,1,sizeof(BmpHeader),BinFile)!=sizeof(BmpHeader))Suc=false;//write Palletefor(i=0,p[3]=0;i<256;i++){p[3]=0;p[0]=p[1]=p[2]=i;//blue,green,redif(fwrite((void*)p,1,4,BinFile)!=4) { Suc=false;break;}}//write image dataextend=(width+3)/4*4-width;if(extend==0){for(pCur=pImg+(height-1)*width;pCur>=pImg;pCur-=width){if(fwrite((void*)pCur,1,width,BinFile)!=(unsigned int)width) Suc=false;//真实的数据}}else{for(pCur=pImg+(height-1)*width;pCur>=pImg;pCur-=width){if(fwrite((void*)pCur,1,width,BinFile)!=(unsigned int)width) Suc=false;//真实的数据for(i=0;i<extend;i++)//扩充的数据if(fwrite((void*)(pCur+width-1),1,1,BinFile)!=1) Suc=false;}}//returnfclose(BinFile);return Suc;}BYTE *Read24BitBmpFile2Img(const char *filename,int *width,int *height){FILE *BinFile;BITMAPFILEHEADER FileHeader;BITMAPINFOHEADER BmpHeader;BYTE *img;unsigned int size;int Suc=1,w,h;*width=*height=0;if((BinFile = fopen(filename,"rb"))==NULL)return NULL;if(fread((void *)&FileHeader,1,sizeof(FileHeader),BinFile)!=sizeof(FileHeader)) Suc=-1;if(fread((void *)&BmpHeader,1,sizeof(BmpHeader),BinFile)!=sizeof(BmpHeader)) Suc=-1;if((Suc==-1) || (FileHeader.bfOffBits<sizeof(FileHeader)+sizeof(BmpHeader))){fclose(BinFile);return NULL;}*width=w=BmpHeader.biWidth;*height=h=BmpHeader.biHeight;size=(*width)*(*height)*3;fseek(BinFile,FileHeader.bfOffBits,SEEK_SET);if((img=new BYTE[size])!=NULL){for(int i=0;i<h;i++){if(fread(img+(h-1-i)*w*3,sizeof(BYTE),w*3,BinFile) != w*3){fclose(BinFile);delete img;img=NULL;return NULL;}fseek(BinFile,(3*w+3)/4*4-3*w,SEEK_CUR);}}fclose(BinFile);return img;}bool Write24BitImg2BmpFile(BYTE *pImg,int width,int height,const char* filename) {FILE *BinFile;BITMAPFILEHEADER FileHeader;BITMAPINFOHEADER BmpHeader;bool Suc=true;int i,extend;BYTE *pCur;//Open Fileif((BinFile=fopen(filename,"w+b"))==NULL){return false;}//Fill the FileHeaderFileHeader.bfType=((WORD)('M'<<8)|'B');FileHeader.bfOffBits=sizeof(BITMAPFILEHEADER)+sizeof(BITMAPINFOHEADER);FileHeader.bfSize=FileHeader.bfOffBits+width*height*3L;FileHeader.bfReserved1=0;FileHeader.bfReserved2=0;if(fwrite((void*)&FileHeader,1,sizeof(BITMAPFILEHEADER),BinFile)!=sizeof(BITMAPFILEHEADER)) Suc=false;//Fill the ImgHeaderBmpHeader.biSize=40;BmpHeader.biWidth=width;BmpHeader.biHeight=height;BmpHeader.biPlanes=1;BmpHeader.biBitCount=24;BmpHeader.biCompression=0;BmpHeader.biSizeImage=0;BmpHeader.biXPelsPerMeter=0;BmpHeader.biYPelsPerMeter=0;BmpHeader.biClrUsed=0;BmpHeader.biClrImportant=0;if(fwrite((void*)&BmpHeader,1,sizeof(BITMAPINFOHEADER),BinFile)!=sizeof(BITMAPINFOHEADER)) Suc=false;//write image dataextend=(3*width+3)/4*4-3*width;if(extend==0){for(pCur=pImg+(height-1)*3*width;pCur>=pImg;pCur-=3*width){if(fwrite((void*)pCur,1,width*3,BinFile)!=(unsigned int)(3*width))Suc=false;//真实的数据}}else{for(pCur=pImg+(height-1)*3*width;pCur>=pImg;pCur-=3*width){if(fwrite((void*)pCur,1,width*3,BinFile)!=(unsigned int)(3*width))Suc=false;//真实的数据if(fwrite((void*)(pCur+3*(width-1)+0),1,extend,BinFile)!=1) Suc=false;//扩充的数据}}//return;fclose(BinFile);return Suc;}bool Template(BYTE *pGryImg,long width,long height,int tempH,int tempW,int tempX,int tempY,float * tempArray,float ratio){BYTE *NewpGryImg;BYTE *hNewGryImg;BYTE *lpSrc;BYTE *lpDst;long i,j,k,l;float result;long LineBytes;LineBytes = WIDTHBYTES(width * 8);hNewGryImg = new BYTE[LineBytes*height];if (hNewGryImg == NULL){return FALSE;}NewpGryImg = hNewGryImg;memcpy(NewpGryImg,pGryImg,LineBytes*height);for(i = tempY; i < height-tempH+tempY+1; i++){for(j = tempX; j < width-tempW+tempX+1; j++){lpDst = NewpGryImg+LineBytes*(height-1-i)+j;result = 0;for (k = 0; k < tempH; k++){for (l = 0; l < tempW; l++){lpSrc = pGryImg+LineBytes*(height-1-i+tempY-k)+j-tempX+l;result += (* lpSrc)*tempArray[k*tempW+l];}}result = result*ratio;result = (float )fabs(result);if(result > 255){*lpDst = 255;}else{*lpDst = (unsigned char)(result+0.5);}}}memcpy(pGryImg,NewpGryImg,LineBytes*height);return TRUE;}bool TempLap(BYTE *pGryImg,long width,long height,int tempH,int tempW,int tempX,int tempY,float * tempArray){BYTE *NewpGryImg;BYTE *hNewGryImg;BYTE *lpSrc;BYTE *lpDst;long i,j,k,l;float result;float resultLap[512][512];long LineBytes;memset(resultLap,0,LineBytes*height);LineBytes = WIDTHBYTES(width * 8);hNewGryImg = new BYTE[LineBytes*height];if (hNewGryImg == NULL){return FALSE;}NewpGryImg = hNewGryImg;memcpy(NewpGryImg,pGryImg,LineBytes*height);for(i = tempY; i < height-tempH+tempY+1; i++){for(j = tempX; j < width-tempW+tempX+1; j++){lpDst = NewpGryImg+LineBytes*(height-1-i)+j;result = 0;for (k = 0; k < tempH; k++){for (l = 0; l < tempW; l++){lpSrc = pGryImg+LineBytes*(height-1-i+tempY-k)+j-tempX+l;result += (* lpSrc)*tempArray[k*tempW+l];}}resultLap[i][j]=result;if(resultLap[i][j] > 255){resultLap[i][j] = 255;}}}for(i = tempY; i < height-tempH+tempY+1; i++){for(j = tempX; j < width-tempW+tempX+1; j++){lpDst = NewpGryImg+LineBytes*(height-1-i)+j;if (resultLap[i][j]>0){for (k = 0; k < tempH; k++){for (l = 0; l < tempW; l++){if (resultLap[i-1+k][j-1+l]<0){*lpDst=resultLap[i][j];goto asd;}}}}*lpDst=0;asd:;}}memcpy(pGryImg,NewpGryImg,LineBytes*height);return TRUE;}bool Robert(BYTE *pGryImg,int width, int height,int threshold){BYTE *lpSrc;BYTE *lpDst;BYTE *NewpGryImg;BYTE *hNewGryImg;int i,j;double result;unsigned char pixel[4];hNewGryImg = new BYTE[width * height];if (hNewGryImg == NULL){return FALSE;}NewpGryImg = hNewGryImg;lpDst = NewpGryImg;memset(lpDst, (BYTE)255, width * height);for(j = height-1; j > 0; j--){for(i = 0;i <width-1; i++){lpSrc = pGryImg + width * j + i;lpDst = NewpGryImg + width * j + i;pixel[0] = (unsigned char)*lpSrc;pixel[1] = (unsigned char)*(lpSrc + 1);pixel[2] = (unsigned char)*(lpSrc - width);pixel[3] = (unsigned char)*(lpSrc - width + 1);result = sqrt(( pixel[0] - pixel[3] )*( pixel[0] - pixel[3] ) + ( pixel[1] - pixel[2] )*( pixel[1] - pixel[2] ));if (result>threshold){result=255;}if (result<threshold){result=0;}*lpDst = (unsigned char)result;}}// 复制经过模板运算后的图像到源图像memcpy(pGryImg, NewpGryImg, width * height);return TRUE;}bool Sobel(BYTE *pGryImg,int width,int height,int threshold){BYTE *lpDst1;BYTE *lpDst2;BYTE *NewpGryImg1;BYTE *hNewGryImg1;BYTE *NewpGryImg2;BYTE *hNewGryImg2;long i,j;int tempH;int tempW;float tempR;int tempX;int tempY;float aTemplate[9];hNewGryImg1 = new BYTE[width * height];if (hNewGryImg1 == NULL){return FALSE;}NewpGryImg1 = hNewGryImg1;hNewGryImg2 = new BYTE[width * height];if (hNewGryImg2 == NULL){return FALSE;}NewpGryImg2 = hNewGryImg2;lpDst1 = NewpGryImg1;memcpy(NewpGryImg1, pGryImg, width * height);lpDst2 = NewpGryImg2;memcpy(NewpGryImg2, pGryImg, width * height);// 设置Sobel模板参数tempW = 3;tempH = 3;tempR = 1.0;tempX = 1;tempY = 1;aTemplate[0] = -1.0;aTemplate[1] = -2.0;aTemplate[2] = -1.0;aTemplate[3] = 0.0;aTemplate[4] = 0.0;aTemplate[5] = 0.0;aTemplate[6] = 1.0;aTemplate[7] = 2.0;aTemplate[8] = 1.0;if (!Template(NewpGryImg1, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}// 设置Sobel模板参数aTemplate[0] = -1.0;aTemplate[1] = 0.0;aTemplate[2] = 1.0;aTemplate[3] = -2.0;aTemplate[4] = 0.0;aTemplate[5] = 2.0;aTemplate[6] = -1.0;aTemplate[7] = 0.0;aTemplate[8] = 1.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){lpDst1 = NewpGryImg1 + width * j + i;lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}if (*lpDst1>threshold){*lpDst1=255;}if (*lpDst1<threshold){*lpDst1=0;}}}memcpy(pGryImg, NewpGryImg1, width * height);return TRUE;}bool Laplace(BYTE *pGryImg,int width, int height){BYTE *lpDst;BYTE *NewpGryImg;BYTE *hNewGryImg;long i,j;int tempH;int tempW;int tempX;int tempY;float aTemplate[9];hNewGryImg = new BYTE[width * height];if (hNewGryImg == NULL){return FALSE;}NewpGryImg = hNewGryImg;lpDst = NewpGryImg;memcpy(NewpGryImg, pGryImg, width * height);// 设置Laplace模板参数tempW = 3;tempH = 3;tempX = 1;tempY = 1;aTemplate[0] = -1.0;aTemplate[1] = -1.0;aTemplate[2] = -1.0;aTemplate[3] = -1.0;aTemplate[4] = 8.0;aTemplate[5] = -1.0;aTemplate[6] = -1.0;aTemplate[7] = -1.0;aTemplate[8] = -1.0;if (!TempLap(NewpGryImg,width,height,tempH,tempW,tempX,tempY,aTemplate)) {return FALSE;}memcpy(pGryImg,NewpGryImg,width*height);return TRUE;}bool Prewitt(BYTE *pGryImg,int width, int height,int threshold){BYTE *lpDst1;BYTE *lpDst2;BYTE *NewpGryImg1;BYTE *hNewGryImg1;BYTE *NewpGryImg2;BYTE *hNewGryImg2;long i,j;int tempH;int tempW;FLOA T tempR;int tempX;int tempY;FLOA T aTemplate[9];// 暂时分配内存,以保存新图像hNewGryImg1 = new BYTE[width * height];if (hNewGryImg1 == NULL){return FALSE;}NewpGryImg1 = hNewGryImg1;// 暂时分配内存,以保存新图像hNewGryImg2 = new BYTE[width * height];if (hNewGryImg2 == NULL){return FALSE;}NewpGryImg2 = hNewGryImg2;// 拷贝源图像到缓存图像中lpDst1 = NewpGryImg1;memcpy(NewpGryImg1, pGryImg, width * height);lpDst2 = NewpGryImg2;memcpy(NewpGryImg2, pGryImg, width * height);// 设置Prewitt模板参数tempW = 3;tempH = 3;tempR = 1.0;tempX = 1;tempY = 1;aTemplate[0] = -1.0;aTemplate[1] = -1.0;aTemplate[2] = -1.0;aTemplate[3] = 0.0;aTemplate[4] = 0.0;aTemplate[5] = 0.0;aTemplate[6] = 1.0;aTemplate[7] = 1.0;aTemplate[8] = 1.0;if (!Template(NewpGryImg1, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}// 设置Prewitt模板参数aTemplate[0] = 1.0;aTemplate[1] = 0.0;aTemplate[2] = -1.0;aTemplate[3] = 1.0;aTemplate[4] = 0.0;aTemplate[5] = -1.0;aTemplate[6] = 1.0;aTemplate[7] = 0.0;aTemplate[8] = -1.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(pGryImg, NewpGryImg1, width * height);return TRUE;}bool Kirsch(BYTE *pGryImg,int width,int height,int threshold) {BYTE *lpDst1; // 指向缓存图像的指针BYTE *lpDst2;BYTE *NewpGryImg1; // 指向缓存图像的指针BYTE *hNewGryImg1;BYTE *NewpGryImg2;BYTE *hNewGryImg2;long i,j;int tempH; // 模板高度int tempW; // 模板宽度FLOA T tempR; // 模板系数int tempX; // 模板中心元素X坐标int tempY; // 模板中心元素Y坐标FLOA T aTemplate[9]; // 模板数组hNewGryImg1 = new BYTE[width * height];if (hNewGryImg1 == NULL){return FALSE;}NewpGryImg1 = hNewGryImg1;// 暂时分配内存,以保存新图像hNewGryImg2 = new BYTE[width * height];if (hNewGryImg2 == NULL){return FALSE;}NewpGryImg2 = hNewGryImg2;// 拷贝源图像到缓存图像中lpDst1 = NewpGryImg1;memcpy(NewpGryImg1, pGryImg, width * height);lpDst2 = NewpGryImg2;memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板1参数tempW = 3;tempH = 3;tempR = 1.0;tempX = 1;tempY = 1;aTemplate[0] = 5.0;aTemplate[1] = 5.0;aTemplate[2] = 5.0;aTemplate[3] = -3.0;aTemplate[4] = 0.0;aTemplate[5] = -3.0;aTemplate[6] = -3.0;aTemplate[7] = -3.0;aTemplate[8] = -3.0;if (!Template(NewpGryImg1, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}// 设置Kirsch模板2参数aTemplate[0] = -3.0;aTemplate[1] = 5.0;aTemplate[2] = 5.0;aTemplate[3] = -3.0;aTemplate[4] = 0.0;aTemplate[5] = 5.0;aTemplate[6] = -3.0;aTemplate[7] = -3.0;aTemplate[8] = -3.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板3参数aTemplate[0] = -3.0;aTemplate[1] = -3.0;aTemplate[2] = 5.0;aTemplate[3] = -3.0;aTemplate[4] = 0.0;aTemplate[5] = 5.0;aTemplate[6] = -3.0;aTemplate[7] = -3.0;aTemplate[8] = 5.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板4参数aTemplate[0] = -3.0;aTemplate[1] = -3.0;aTemplate[2] = -3.0;aTemplate[3] = -3.0;aTemplate[4] = 0.0;aTemplate[5] = 5.0;aTemplate[6] = -3.0;aTemplate[7] = 5.0;aTemplate[8] = 5.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板5参数aTemplate[0] = -3.0;aTemplate[1] = -3.0;aTemplate[2] = -3.0;aTemplate[3] = -3.0;aTemplate[4] = 0.0;aTemplate[5] = -3.0;aTemplate[6] = 5.0;aTemplate[7] = 5.0;aTemplate[8] = 5.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}memcpy(NewpGryImg2, pGryImg, width * height);//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板6参数aTemplate[0] = -3.0;aTemplate[1] = -3.0;aTemplate[2] = -3.0;aTemplate[3] = 5.0;aTemplate[4] = 0.0;aTemplate[5] = -3.0;aTemplate[6] = 5.0;aTemplate[7] = 5.0;aTemplate[8] = -3.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板7参数aTemplate[0] = 5.0;aTemplate[1] = -3.0;aTemplate[2] = -3.0;aTemplate[3] = 5.0;aTemplate[4] = 0.0;aTemplate[5] = -3.0;aTemplate[6] = 5.0;aTemplate[7] = -3.0;aTemplate[8] = -3.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(NewpGryImg2, pGryImg, width * height);// 设置Kirsch模板8参数aTemplate[0] = 5.0;aTemplate[1] = 5.0;aTemplate[2] = -3.0;aTemplate[3] = 5.0;aTemplate[4] = 0.0;aTemplate[5] = -3.0;aTemplate[6] = -3.0;aTemplate[7] = -3.0;aTemplate[8] = -3.0;if (!Template(NewpGryImg2, width, height, tempH, tempW, tempX, tempY, aTemplate, tempR)){return FALSE;}//求两幅缓存图像的最大值for(j = 0; j <height; j++){for(i = 0;i <width-1; i++){// 指向缓存图像1倒数第j行,第i个象素的指针lpDst1 = NewpGryImg1 + width * j + i;// 指向缓存图像2倒数第j行,第i个象素的指针lpDst2 = NewpGryImg2 + width * j + i;if(*lpDst2 > *lpDst1){*lpDst1 = *lpDst2;}}}memcpy(pGryImg, NewpGryImg1, width * height);return TRUE;}++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ gradient.cpp#include <windows.h>#include <math.h>bool Gradient(BYTE *pGryImg,int width,int height,int threshold){BYTE *lpSrc;BYTE *lpDst;BYTE *NewpGryImg;BYTE *hNewGryImg;int i,j;double result;unsigned char pixel[4];hNewGryImg = new BYTE[width * height];if (hNewGryImg == NULL){return FALSE;}NewpGryImg = hNewGryImg;lpDst = NewpGryImg;memset(lpDst, (BYTE)255, width * height);for(j = height-1; j > 0; j--){for(i = 1;i <=width-1; i++){lpSrc = pGryImg + width * j + i;lpDst = NewpGryImg + width * j + i;pixel[0] = (unsigned char)*lpSrc;pixel[1] = (unsigned char)*(lpSrc - 1);pixel[2] = (unsigned char)*(lpSrc - width);result = sqrt(( pixel[0] - pixel[1] )*( pixel[0] - pixel[1] ) + ( pixel[0] - pixel[2] )*( pixel[0] - pixel[2] ));if (result>threshold){result=255;}if (result<threshold){result=0;}*lpDst = (unsigned char)result;}}memcpy(pGryImg,NewpGryImg,width*height);return TRUE;}++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ Canny.cpp#include <windows.h>#include <math.h>/*************************************************************************** /函数名称:* MakeGauss()** /输入参数:* double sigma - 高斯函数的标准差* double **pdKernel - 指向高斯数据数组的指针* int *pnWindowSize - 数据的长度* /说明:* 这个函数可以生成一个一维的高斯函数的数字数据,理论上高斯数据的长度应* 该是无限长的,但是为了计算的简单和速度,实际的高斯数据只能是有限长的* pnWindowSize就是数据长度**********************************************************************/void MakeGauss(double sigma, double **pdKernel, int *pnWindowSize){int i ;int nCenter;// 数组的某一点到中心点的距离double dDis ;double PI = 3.14159;double dV alue;double dSum ;dSum = 0 ;// 数组长度,根据概率论的知识,选取[-3*sigma, 3*sigma]以内的数据。