悬臂式掘进机回转台的优化设计文献综述
EBZ132CZ悬臂式掘进机改进及应用
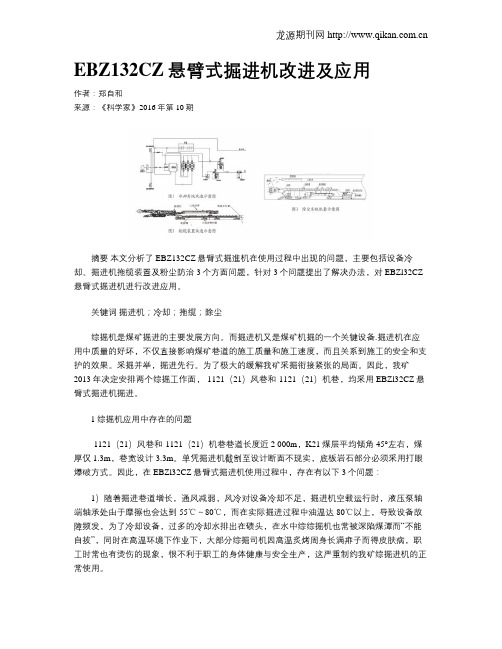
EBZ132CZ悬臂式掘进机改进及应用作者:郑自和来源:《科学家》2016年第10期摘要本文分析了EBZ132CZ悬臂式掘進机在使用过程中出现的问题,主要包括设备冷却、掘进机拖缆装置及粉尘防治3个方面问题,针对3个问题提出了解决办法,对EBZl32CZ 悬臂式掘进机进行改进应用。
关键词掘进机;冷却;拖缆;除尘综掘机是煤矿掘进的主要发展方向。
而掘进机又是煤矿机掘的一个关键设备.掘进机在应用中质量的好坏,不仅直接影响煤矿巷道的施工质量和施工速度,而且关系到施工的安全和支护的效果。
采掘并举,掘进先行。
为了极大的缓解我矿采掘衔接紧张的局面。
因此,我矿2013年决定安排两个综掘工作面,-1121(21)风巷和-1121(21)机巷,均采用EBZl32CZ悬臂式掘进机掘进。
1综掘机应用中存在的问题-1121(21)风巷和-1121(21)机巷巷道长度近2 000m,K21煤层平均倾角45°左右,煤厚仅1.3m,巷宽设计3.3m。
单凭掘进机截割至设计断面不现实,底板岩石部分必须采用打眼爆破方式。
因此,在EBZl32CZ悬臂式掘进机使用过程中,存在有以下3个问题:1)随着掘进巷道增长,通风减弱,风冷对设备冷却不足,掘进机空载运行时,液压泵轴端轴承处由于摩擦也会达到55℃~80℃,而在实际掘进过程中油温达80℃以上,导致设备故障频发,为了冷却设备,过多的冷却水排出在碛头,在水中综综掘机也常被深陷煤潭而“不能自拔”,同时在高温环境下作业下,大部分综掘司机因高温炙烤周身长满痱子而得皮肤病,职工时常也有烫伤的现象,很不利于职工的身体健康与安全生产,这严重制约我矿综掘进机的正常使用。
2)EBZ132CZ悬臂式掘进机行走过程中,电缆在地上前后移动,需专人进行监管并进行拖动,体力消耗大,综掘机在切割碛头前进与后退过程中,也时常有压坏电缆的现象,对安全造成严重影响。
3)在综合机械化掘进过程中会产生大量粉尘,造成作业场所的现场作业人员视线受阻,吸入大量粉尘,严重威胁员工的身心健康,影响安全生产。
EB215011型悬臂式掘进机优化设计及应用

科技资讯 SC I EN C E &TE C HN O LO G Y I NF O R MA T IO N 工 业 技 术EBZ150II型悬臂式掘进机是集截割、装运和行走于一体的综合掘进设备,属于悬臂式纵向截割的大断面掘进机。
本机采用了电机和液压混合传动方式,操作简便,运转平稳、可靠。
配有内喷雾和外喷雾,有效抑制截割过程中产生的粉尘,本机采用独特的分装运系统,降低了截割煤(岩)过程中装运机构的事故发生率,改善了装运效果,提高了装运能力。
基于如此多优点,跃进矿矿选用此型设备,但在实际生产过程中,也暴露了很多问题:首先是开式主铲板产生回头煤太多,易产生第一运输机上小刮板机卡死现象。
其次液压系统也不适合跃进矿生产。
为此进行了优化设计及改进使掘进机能更好地适用于矿井生产。
1 EBZ150II型悬臂式掘进机1.1主要结构及功能EBZ150II悬臂式掘进机在液压、电气控制下,可以轻松灵活地完成掘进作业,主要由截割部、铲板部、第一运输机、本体部、行走部、后支承部、润滑系统、液压系统、水系统、电气系统和护板部等组成。
掘进机主要功能是实现连续切割、装载和运输作业。
适用于煤巷、半煤岩巷及软岩的巷道掘进,最大截割面积24m2,截割硬度为80MPa。
适用环境温度为0~30℃。
1.2施工特点(1)EBZ150II型掘进机有高低2种掘进速度,低速切割扭矩大,高速切割效益高。
(2)掘进机掘进速度快,巷道成形好,安全系数高。
(3)切割振动小,有可提高机器稳定性的支腿装置,工作稳定性能好,使得整机可靠性能提高。
2 应用中优化设计及改进2.1运输系统改进EBZ150II型掘进机整个截割部通过升降液压缸和销轴安装在主机架上,在回转和升降液压缸的联动作用下,配合截割头的旋转从而完成破落爆岩的动作,装运部是把破落下的煤岩装运到掘进机后部的第二运输机上,转运部由装截部和第一运输机组成,装载部是由铲板、星轮和驱动马达等组成,而问题就出在第一运输机与铲板上,第一运输机的构造,是由绕过机头链轮和机尾链轮的无极循环刮板链作为牵引机构,以溜槽作为承载机构,使链轮带动与之啮合的刮板链连续运转将装在溜槽上的煤,拉到尾部卸载。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展1. 引言1.1 悬臂式掘进机导航技术的重要性悬臂式掘进机导航技术还可以大大减少人工干预,提高施工安全性。
借助导航系统,工程师们可以远程监控掘进机的运行状况,及时发现问题并采取措施,避免意外事件的发生。
导航技术的应用还能够减少施工过程中的浪费,提高资源利用率,降低施工成本,使工程更具竞争力。
可以说悬臂式掘进机导航技术的重要性不言而喻。
它不仅可以提高工程施工的效率和质量,还能够保障工程的安全性和节约成本。
随着技术的不断发展和创新,悬臂式掘进机导航技术将在工程领域发挥越来越重要的作用,成为推动工程发展的重要驱动力。
1.2 悬臂式掘进机导航技术的应用领域1. 地铁隧道建设:在地铁隧道建设中,悬臂式掘进机导航技术可以帮助工程人员准确控制掘进机的位置和方向,从而保证隧道施工的准确性和高效性。
通过导航技术,可以避免碰撞障碍物和误差,提高隧道施工的安全性和质量。
2. 正文2.1 悬臂式掘进机导航技术的发展历程悬臂式掘进机导航技术的发展历程可以追溯到上世纪90年代。
当时,随着科技的不断进步,人们开始意识到悬臂式掘进机导航技术的重要性,并加大了相关研究与开发投入。
最初的悬臂式掘进机导航技术主要以传统的激光测距技术和惯性导航技术为主,虽然在一定程度上能够满足导航需求,但受限于精度和稳定性,无法完全满足工程需求。
随着全球卫星导航系统的不断完善和发展,如GPS、GLONASS 等系统的广泛应用,悬臂式掘进机导航技术逐渐实现了从传统导航方式向卫星导航方式的转变。
这使得导航精度得到了显著提高,同时也增强了导航系统的稳定性和可靠性。
此外,随着人工智能、机器学习等新兴技术的运用,悬臂式掘进机导航技术也不断进行创新与突破,为提升工程施工效率和质量提供了强有力的支持。
总的来说,悬臂式掘进机导航技术在不断与时俱进的过程中,经历了从传统到现代、从精度不足到精准导航的演进,为工程施工带来了更高效、更安全、更可靠的导航解决方案。
EBZ150Ⅱ型悬臂式掘进机优化设计及应用

E BZ1 5 0 I I 型悬 臂式 掘进 机是 集 截割 、 装 运和行走于一 体的综合掘 进设备 , 属 于 悬
等组成 , 而 问题 就 出 在 第 一 运 输 机 与铲 板 工 作 面 在 井 下 - 4 0 0 水平 面 , 掘 进 机 喷 雾 水
上, 第 一 运 输 机 的构 造 , 是 由绕 过机 头链 轮 源 来 自+ 1 7 0 泵房, 从+ 1 7 0 ~- 4 0 0 水 源 的 压
由截 割 部 、 铲板部 、 第 一运 输 机 、 本 体部 、 行 的 溜 槽底 部 的开 口用5 4 0 mm x 2 0 0 0 mm ×
一
充分显现 出了它的高产高 效 , 故 障 率 低 的
皿圆
{
酬
工 业 技 术
① EBZ 1 5 0 I I 型悬臂 式掘 进机优 化设 计及应 用
许根 莲 蒋琳 刘艳 ( 河南 大有 能源跃进矿 河南义 马 4 7 2 3 0 0 ) 摘 要: E B Z1 5 0 I I 型悬臂式 掘进机 在跃进矿 实际生 产过程 中, 开式主铲板 产生回头煤太 多, 多次 出现 小刮板机卡死现 象 其次液 压 秉统也
进机能更好地 适用于矿井生产。
面 窝头 积 水 造 成 掘 进 机 行 走 不 便 。 ( 4 ) 铲板 4 换 向 阀之 前 合 流 进 入 整个 行走 回路 , 实现
不 能 落 到 相 应 底部 , 机 器 工 作 时 易产 生 振 掘 进 机 行 走 马 达 的 快 速 运 转 , 同时 也 增 大 动。 针对上述问题 , 制定方案 , 把 铲 板 下 的 牵 引 力 。
1 E B Z 1 5 0 1 I 型悬 臂式掘进机
1 . 1 主要 结构及功 能
EBZ132掘进机回转台的设计改进与有限元分析

EBZ132掘进机回转台的设计改进与有限元分析摘要:对ebz132掘进机的重要部件回转台进行设计改进,采用整体铸造结构。
利用ansys软件,对回转台进行有限元分析,并通过对模型加载分析其强度状况,为ebz132掘进机回转台设计改进提供理论依据。
关键词:回转台有限元ansys中图分类号:s611文献标识码: a 文章编号:根据用户及现场技术人员的反馈信息,对ebz132掘进机焊接件回转台进行结构改进,采用铸造工艺,在回转台整体的强度及刚度上都有所加强,本文应用ansys软件,对改进后的回转台进行应力分析及强度校核,找出强度薄弱的区域,对应力集中或者危险区域进行优化设计和结构改进。
一、概述掘进机回转台是掘进机的重要组成部分,主要用于连接截割部与本体部,通过回转台的旋转及液压缸的伸缩,实现截割部的上下左右回转运动。
ebz132掘进机原有的回转台为焊接件,由于ebz132掘进机结构紧凑,焊接件回转台焊接工艺空间小,导致有些焊接面无法保证焊接强度,进而影响回转台的稳定性,设备在井下工作过程中,整机的可靠性得不到可靠保障。
1 回转台的结构回转台的结构主体有六组连接孔,用于连接截割部升降油缸、回转油缸及截割部。
回转台上沿圆周分布的孔,用于回转台与回转轴承内圈的连接,通过回转轴承实现与本体架的连接,回转台的具体结构如图1所示。
图1 回转台结构图2 回转台工况与受力分析(1)工况分析在掘进机工作过程中,回转台主要受以下几个外力的作用:a.掘进时的行走驱动力;b.截割部升降油缸;c截割部回转油缸;d截割部的自重力对回转台产生的弯矩。
截割部在工作时受到变力作用。
考虑实际工作情况,动态比静态危险;截割部在水平位置比在其他有角度的位置危险,故选取掘进机截割部处于水平位置工作时的工况进行分析。
受力情况如图2所示。
图2 回转台受力图.掘进时的行走驱动力.截割部升降油缸推力.截割部回转油缸推力.截割部的自重对回转台产生的弯矩(2)受力分析ebz132掘进机的技术参数:经过计算,回转台所受载荷 =208kn, =361.73kn, =602.88kn,=147.4knm。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展
悬臂式掘进机是一种用于岩石掘进的大型机械设备,用于挖掘地下隧道、矿井和地铁隧道等工程项目。
在过去的几十年里,悬臂式掘进机导航技术得到了广泛的应用和研究。
本文将介绍悬臂式掘进机导航技术的现状及其发展。
当前的悬臂式掘进机导航技术主要采用无线通信和激光测距技术。
无线通信技术可以用于悬臂式掘进机的位置和姿态的实时监测。
激光测距技术则可以用于确定悬臂式掘进机与隧道壁之间的距离,并进行高精度的测量。
这些技术的研究和应用使得悬臂式掘进机在地下工程项目中的导航更加准确和高效。
悬臂式掘进机导航技术的发展还面临一些挑战。
地下环境复杂,包括地质条件、空间限制和随机扰动等因素都会对导航精度产生影响。
导航系统需要具备较高的鲁棒性和自适应性才能应对各种复杂环境。
悬臂式掘进机的导航精度对工程项目的成功与否有着至关重要的影响。
导航系统需要具备高精度的定位和测量能力。
未来,悬臂式掘进机导航技术有望在以下几个方面得到进一步发展。
随着人工智能技术的不断发展,悬臂式掘进机导航系统可以利用深度学习和神经网络等技术进行数据处理和模型预测,以提高导航精度和效率。
悬臂式掘进机导航技术可以与其他智能化技术相结合,例如机器人技术和自主导航技术,以实现悬臂式掘进机的智能化控制和自主导航。
悬臂式掘进机导航技术还可以应用于更多的工程项目,例如水下隧道和海底隧道等。
悬臂式掘进机导航技术在不断发展和创新中,已经在地下工程项目中发挥了重要的作用。
随着技术的进步和应用领域的扩展,相信悬臂式掘进机导航技术在未来将会得到进一步的发展和应用。
我国悬臂式巷道掘进机技术的现状与发展
我国悬臂式巷道掘进机技术的现状与发展
悬臂式巷道掘进机是一种高效的施工机械,它可以同时在一个巷道内掘进和完成附属工程,如支护工程、灌浆工程等,因此,它在掘进行业占有重要的地位。
随着国家对城市建设的关注,悬臂式巷道掘进机技术在我国也取得了较大的发展,其技术也取得了一定的进步。
首先,悬臂式巷道掘进机技术的发展是由技术进步促进的。
近年来,由于技术精进,悬臂式巷道掘进机的性能越来越优秀,大大提高了施工效率,其自动化控制功能也表现出色。
同时,由于技术的先进,悬臂式巷道掘进机也逐步应用了机械、电气、电子技术等,大大降低了其能耗,提高了使用和运行效率。
其次,悬臂式巷道掘进机技术的发展也受到材料的不断改进的推动。
随着新型加工技术的发展,强度高,刚性好,精度高的新型金属材料应用于悬臂式巷道掘进机的结构,使其不仅具有更强的抗磨性能和耐用性,而且可以更大程度地发挥机械能力,保证长期稳定性和高利用率。
最后,悬臂式巷道掘进机技术发展受益于系统性设计和装备改进。
系统性设计,接受各种技术和设备的结合,运用智能化技术,把活动式的回转台改进为永久式的回转系统,使其具有较高的自动化水平和控制精度,从而创造出工作更加高效和精确的工作空间。
总之,悬臂式巷道掘进机技术在我国比较广泛地应用于现代巷道工程,其在施工效率和质量控制方面有着明显的优势,而其发展也受益于新型加工技术、材料改进、系统性设计和装备改进。
在未来发展中,我国悬臂式巷道掘进机技术重点应集中于安全保障、高效率施工以及节约资源等方面。
EBZ160型悬臂式掘进机改进应用

矿 井 生 产 中能 更好 地 发 挥 效 能 。
输送机 , 如 果 两 部 掘 进 机 跟 的 距 离 太 近 会 4 应用效果 造 成 后 部 掘进 机把 前 部 掘 进 机 二 运 电动滚 2 5 l 1 0 运输 巷 掘进 工作 面安 装 前 、 后部
筒 胶 带 机 支撑 座 地 基 挖 空 , 胶 带机 下 陷 , 甚 2 台E B Z l 6 0 掘进 机 , 1 0 月开 始 , 严格 衔 接 施 至有被割 坏的危险 。 如果 两 台 掘 进 机拉 大 工 工 序 , 采取 掘一 网锚一 网安全措 施 , 1 0
工 业 技 术
E B Z 1 6 0 型悬 臂式 掘进机 改进应 用
蒋 琳 许 根莲 ( 河 南大有 能源股 份有 限公司 跃进矿 河南 义马
4 7 2 3 0 0 ) 摘 要: 煤矿井下 两 台 E B Z 1 6 0 型悬臂 式掘进机联 合掘进 生产过 程中 , 发现很 难保 证上部掘进机 割下的蝶 落入后部掘进机 截 割头 , 经 后部 掘进机 第一 运输机( 刮扳机) 、 第二运输 机( 电动滚 筒胶带机) 将煤 炭装D s P —l 0 8 0 /1 6 0 胶带输 送机 , 为此对 后支撑部位 进行改进 , 使其在 矿 井安 全 生产 中 能更好地 发挥 效 能 。 关键词 : 掘进 机 刮板机 中 图分 类 号 : T D 4 2 l 文献 标 识 码 : A 文章 编号 : 1 6 7 2 - 3 7 9 1 ( 2 0 l a ) o 4 ( e ) - o 1 1 0 - 0 l
对悬臂式掘进机智能掘进的分析
对悬臂式掘进机智能掘进的分析摘要:随着近些年来煤矿智能化建设工作的快速推进,综掘工作面的智能化水平得到了明显的提升,对智能化掘进系统的需求更是日益旺盛。
而悬臂式掘进机作为整个智能化掘进系统的核心设备,其本身的技术水平在很大程度决定了综掘工作面的智能化水平,甚至是整个煤矿智能化建设水平。
所以,加强对悬臂式掘进机智能掘进问题的研究则具有十分重要的现实意义。
鉴于此,本文笔者即结合相关参考文献与个人研究经验,对悬臂式掘进机智能掘进的相关问题展开粗浅的分析与探讨,以期为综掘工作面的全面智能化掘进奠定良好的基础。
关键词:悬臂式掘进机智能掘进定位自动截割前言因煤矿智能化可以有效缓解当前煤矿一线劳动力日益匮乏的局面,同时有利于提高煤矿矿井生产的安全性,提高煤矿矿井生产效率,所以煤矿智能化建设日益被重视。
而悬臂式掘进机的智能化建设,又是综掘工作面智能化建设的重中之中。
所以,对悬臂式掘进机的智能掘进问题展开深入的研究与探讨,早已成为实现综掘工作面全面智能化掘进的关键。
鉴于此,以下笔者针对当前悬臂式掘进机智能掘进应用过程中普遍存在的问题展开探讨,提出几点个人建议,以供参考。
1悬臂式掘进机智能掘进过程中存在的问题当前悬臂式掘进机在实际智能掘进过程中还存在着一些显而易见的问题,严重限制了悬臂式掘进机的智能化使用与智能化发展,为此以下笔者针对这些显而易见的问题展开分析与探讨。
第一,悬臂式掘进机的自动截割方式无法满足高效掘进需求。
一方面,利用红外激光定位结合悬臂式掘进机的自身姿态进行自动截割时,采取腰线对齐的方式,无法对煤岩分界进行准确的识别,截割后也有可能遗留下伞檐,引发安全事故。
同时,采取红外激光定位时,需要提前做好挂牌、找点等准备工作,其工序也过于复杂。
另一方面,悬臂式掘进机在定位自动截割时,掘进机的截割头无法伸缩或者是伸缩行程无法补偿截割巷道的边角,其所产生的截割距离损失,会导致掘进机巷道迎头的成形效果相对较差,此时就需要进行人工俢形,对巷道肩窝、底角实施二次截割,严重拖慢综掘工作面的掘进速度。
毕业论文-悬臂式掘进机位姿测量系统的设计与实现
武汉理工大学毕业设计(论文)悬臂式掘进机位姿测量系统的设计与实现学院(系):信息工程学院专业班级:学生姓名:指导教师:目录1 绪论 (1)1.1课题研究背景及意义 (1)1.2国内外研究现状 (1)1.3课题的研究内容 (3)2悬臂式掘进机位姿测量系统的设计 (4)2.1掘进机位姿测量系统方案对比选取 (5)2.1.1掘进机相对位置测量方式 (5)2.1.2掘进机角度测量方式 (6)2.1.3掘进机防撞检测方式 (7)2.2系统总体构成 (8)2.2.1系统总体结构 (8)2.2.2系统实际安装设计 (8)3 悬臂式掘进机位姿测量系统的实现 (10)3.1图像采集及处理模块 (10)3.1.1图像采集模块 (10)3.1.2图像数据处理模块 (12)3.2航姿模块 (13)3.3控制模块 (14)3.3.1 MCU模块 (14)3.3.2 CAN通信模块 (17)3.3.3 485通信模块 (19)3.3.4电源模块 (21)3.4光电开关模块 (22)3.5系统实现 (23)4 实验结果与分析 (26)4.1悬臂式掘进机位姿测量系统的实验环境 (26)4.2实验结果与分析 (27)5 总结与展望 (31)5.1工作总结 (31)5.2展望 (31)参考文献 (31)致谢 (31)摘要目前在我国煤矿井下煤巷的掘进施工中,为保证掘进机按事先设计方向定向掘进,通常采用在巷道顶板悬挂激光指向仪的方法,利用单点激光光斑指示掘进方向,该方法精度、准确度、工作效率都相当低下。
在掘进机广泛应用于采矿工程和地下工程时代,掘进机的发展趋势是智能化、无人化,提高我国掘进机自动化水平是当前采矿和地下工程的一大重要课题。
本论文提出一种CDD摄像头结合航姿参考系统的新型掘进机位置参数测量方法。
通过航姿参考系统获取掘进机的俯仰角、偏向角和滚动角参数。
通过在掘进机上安装半透明靶面,和巷道平行的激光指向仪将激光指向正前方的靶面上,CCD摄像头获取图像信息经ARM进行图像处理得出当前的偏向位移信息,由C8051主控对角度和位移数据融合处理后经CAN总线发送到掘进机控制器上。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展【摘要】悬臂式掘进机导航技术是隧道施工中的重要技术之一,本文通过对悬臂式掘进机导航技术的现状、发展趋势、挑战与解决方法、工程应用以及未来展望进行分析。
现阶段,悬臂式掘进机导航技术在隧道施工中已经得到广泛应用,但仍面临着定位精度不高、误差较大等问题。
未来,随着技术的不断进步,悬臂式掘进机导航技术将继续创新,为隧道工程带来更大便利,前景可期。
悬臂式掘进机导航技术的持续发展将为隧道工程的高效进行提供技术支持,为工程施工带来更多发展机遇。
【关键词】悬臂式掘进机、导航技术、现状、发展趋势、挑战、解决方法、工程应用、未来展望、持续创新、工程便利、前景可期1. 引言1.1 悬臂式掘进机导航技术概述悬臂式掘进机导航技术是随着现代工程建设需求的不断提升而逐渐发展起来的一项新技术。
悬臂式掘进机是一种特殊的机械设备,其主要用途是在地下隧道、矿山及其他工程中进行掘进作业。
而导航技术则是为了提高悬臂式掘进机的定位精度和作业效率而引入的。
导航技术通过利用高级定位系统和数字化地图等技术手段,可以实现对悬臂式掘进机的精确定位和导航指引,从而提高施工的准确性和效率。
悬臂式掘进机导航技术的发展使得施工人员可以更加方便地控制和操作机器,减少了人为失误的可能性,提高了工程的安全性和准确性。
目前,随着导航技术的不断进步和应用,悬臂式掘进机在工程建设领域中的应用越来越广泛,为工程施工带来了巨大的便利和效益。
随着技术的不断完善和推广,悬臂式掘进机导航技术必将在未来得到更广泛的应用和发展,为工程建设带来更多的便利和效益。
2. 正文2.1 悬臂式掘进机导航技术现状分析目前,悬臂式掘进机导航技术在隧道施工和地下矿山开采中得到了广泛应用。
通过对悬臂式掘进机导航技术现状的分析可知,该技术的发展已经取得了一定的成果,但仍存在一些挑战和问题需要解决。
目前悬臂式掘进机导航技术在定位精度和稳定性方面还有进一步提升的空间。
由于地下环境复杂多变,导航系统可能受到地下矿石的影响而出现误差,导致机器无法准确到达目标位置。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展悬臂式掘进机是与千钧一发的岩土相互作用展开战斗的重要工具,其导航技术将极大程度上决定着掘进机在工程中的性能和效率。
当前,随着导航技术的不断更新和普及,悬臂式掘进机的导航技术也在逐步发展完善,为掘进机的智能化控制提供更加可靠、精准的支持。
以下从悬臂式掘进机导航技术的现状和发展两个方面进行介绍与阐述。
目前,悬臂式掘进机常用的导航技术主要包括以下几种:1、全站仪全站仪是一种高精度、高效率的测量仪器,它能够利用摄影测量、雷达测距和三角测量等不同方式所搜集的数据进行分析、计算和处理,并且具备高精度定位、高速度测量、远距离通信等功能。
悬臂式掘进机常用全站仪作为导航设备,利用全站仪的精准定位能力,实时记录掘进机的坐标和姿态,从而保证掘进机在复杂地形和地质中高效推进。
2、GPS导航GPS导航是一种基于全球卫星定位系统的导航技术,它能够实现全球范围的高精度定位,具有可靠性高、定位精度高、测量速度快等优点。
悬臂式掘进机的GPS导航技术可以通过安装卫星接收器将卫星信号传输给控制器,从而实现对掘进机的准确定位和轨迹跟踪。
3、惯性导航惯性导航是一种利用陀螺仪和加速度计等惯性器件进行定位的导航技术,具有高精度、无需外部信号、适用于高速环境等特点。
悬臂式掘进机的惯性导航技术可以通过在掘进机上安装惯性测量单元实现,该技术对于保持掘进机的稳定性和精度有着重要的作用。
1、多模式导航系统的研究多模式导航系统是指将多种导航技术整合在一起形成的一种导航方案。
该方案集成了不同的位置传感器、导航算法和数据处理技术,使得导航精度更加精确和可靠。
悬臂式掘进机的多模式导航系统正在逐步发展,通过将不同的导航技术进行整合,从而提高掘进机在不同地质和地形环境下的导航精度和实时性。
2、机器学习技术的应用机器学习技术是一种能够通过数据训练和自主学习的算法,可以对数据进行分析和识别,从而实现预测、分类和控制等功能。
悬臂式掘进机的机器学习技术应用正在逐渐普及,通过对大量的掘进数据进行分析和建模,使得掘进机在处理数据、优化控制和避雷等方面更加智能化和高效率。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展悬臂式掘进机是煤矿井巷掘进的一种重要工具,在煤矿井巷的掘进工作中得到了广泛的应用。
近年来,随着技术的不断革新和更新,悬臂式掘进机的导航技术也逐渐被人们重视和普及。
本文将对悬臂式掘进机的导航技术现状及其发展进行分析和总结。
1.传统导航技术传统的悬臂式掘进机导航技术主要采用激光、光电、微波等技术进行定位,这些技术的原理是通过向电子设备发送特定信号,利用设备接收和处理信号来确定位置。
但是,这些技术存在以下不足:(1)定位精度较低,难以满足煤矿井巷掘进精度要求;(2)需要维护和更新设备,增加了运维成本;(3)电磁波容易受到环境干扰,导致设备误差增大。
2.基于导航仪的导航技术为了解决传统技术存在的问题,近年来悬臂式掘进机导航技术逐渐向基于导航仪的技术转变。
基于导航仪的技术主要是通过GPS等卫星定位方式来获取悬臂式掘进机实时位置。
具体实现方式是将定位设备安装在悬臂式掘进机上,并与计算机进行数据交换,计算机通过数据处理算法获得悬臂式掘进机的具体位置。
相比传统技术,基于导航仪的技术具有以下优点:(1)定位精度提高,数据精度可以达到厘米级;(2)定位设备精度高,容易维护和更新;(3)不受环境干扰影响。
随着我国煤炭行业向更高效、更智能化发展,悬臂式掘进机导航技术也在不断发展。
未来,悬臂式掘进机导航技术具有以下发展趋势:1.完善导航算法目前,基于导航仪的悬臂式掘进机导航技术在实现基本定位功能上已经取得了成功,但是完善导航算法是未来这一技术发展的重要目标。
完善导航算法不仅可以提高数据精度和减少误差,而且可以将其应用于更多领域中,如无人车等。
2.增强设备底座的稳定性目前基于导航仪的悬臂式掘进机导航技术的一个问题是设备底座的稳定性,采掘过程中设备容易受到颠簸,导致定位设备的离线和数据误差。
完善底座结构及稳定措施是扩大悬臂式掘进机应用范围和提升技术难度的重要任务。
3.引入无人机技术随着无人机技术的发展及成本的不断降低,无人机在煤炭行业中的应用前景越来越广阔。
悬臂式掘进机技术改进分析

悬臂式掘进机技术改进分析摘要目前,某煤层巷道掘进速度较慢,为提高单进速度,使得悬臂式掘进机充分适应煤层巷道掘进要求,应对该掘进机切割机构、装载机构及液压系统进行相应技术改进。
关键词掘进机;技术改进;单进速度现阶段,某矿采掘生产工作主要在9号煤层进行。
目前,9号煤综掘工作面巷道主要支护形式为锚杆支护,所使用掘进机型为悬臂式掘进机,月进尺平均为400m左右,难以满足实际采掘衔接要求。
除十分复杂的矿山地质条件是影响掘进速度的主要因素之外,掘进机配置是否合理也是影响掘进速度的直接原因。
由于工作面支护作业与截割不能平行作业,加之配置不合理,使得掘进机停机较频繁,割、装、运煤速度较慢,严重影响了综掘机械化的发挥。
要在确保支护质量前提下提高进尺生产速度,则须在掘进机上从如下几方面作出改进。
1 对截齿进行技术改进1)对截齿进行技术改进。
9号煤层主要特点为煤层厚度平均为1.4m左右,设计巷道毛高为2.2m,净高为2.1m,需切割0. 8m左右的底砰(岩),且在实际掘进施工过程中,每条掘进巷道都有不同程度的断层或无炭柱。
而目前掘进机切割系统切割效率较低,时间长,截齿损耗率高,目前其损耗率为2.5m/个。
经实际检验证明,现所使用的截齿硬度不能满足9号煤层的掘进工作需要,须提高其硬度。
目前,掘进机切割头上主要使用的是带合金头的镐形截齿。
尽管近年来研究人员对镐形截齿进行了深人研究,制造工艺也有了极大的改善,通过采用新的焊接技术、增大合金头直径和提高截齿头部抗磨性等新方法大大改善了镐形截齿的耐用性,但是仍然解决不了镐形截齿无法经济切割硬岩的问题。
现阶段,国外采矿科研部门研究开发出一种新型切割刀具—圆盘截割刀,并且在硬岩掘进中成功使用了该刀具,这就为硬岩截割提供了一种新的解决办法。
这种圆盘切割刀具采用滚压破岩原理,不仅可以提高掘进机的截割硬岩的能力,而且还可以增加截割头的寿命。
经过研究人员测试发现,小盘径圆盘截割刀具的切痕较小,达到相同切割深度所需的力比普通盘形截割刀具要小得多,而且小盘径圆盘截割刀具还具有体积小、重量轻、易操作等特点。
悬臂式硬岩掘进机的优化与应用

FORUM 论坛装备74 /矿业装备 MINING EQUIPMENT悬臂式硬岩掘进机的优化与应用□ 姚永晓 大同煤矿集团华盛虎峰煤业有限公司我国于1980年代,引入了硬岩式掘进机,早期主要应用方向为水工隧道工程施工。
郑煤集团裴沟煤矿在2007年购进了EBZ200H 硬岩掘进机,在投入使用后,显著提升了掘进进尺,带来了巨大的经济效益。
然而,我国当前大多数硬岩掘进机仍存有明显的问题,对矿山的生产和发展仍存在一定程度上的制约。
如何对悬臂式硬岩掘进机进行有针对性的优化,更大程度上提高设备的使用效率,减少故障发生次数,是所有全岩巷道工作者最关心的问题。
在此背景下,以某公司下属某矿中EBZ-300悬臂式硬岩掘进机为例,结合使用过程中出现的问题,提出优化方案。
1 掘进机概述EBZ-300悬臂式硬岩掘进机,根据功能部位来分,可分为截割部、装载部、运输部、本体部、行走部、后稳定装置六大部分。
工作原理为电机带动滚筒运转,截割头上的截齿直接作用于岩壁,将煤矿从岩层上切割下来。
掘进机主要技术参数如表1所示。
2 掘进机问题分析2.1 减速器问题掘进机电动机的转速一般为1 470 r/min 左右,而滚筒的转速根据直径大小而有所变化,一般为从50 ~100 r/min。
掘进机处于运行状态下时,其内部的齿轮、轴承都持续高速运转,一旦有泥巴、煤块或者水等杂物进入后,会被这些高速旋转的零件抛向设备内部的各个角落,对设备产生恶劣的后果。
第一,较大的石子或煤块受外力作用,会对部分轴承表面造成破坏,使得轴承表面的不平整,影响轴承的受力平衡,对损伤部位的磨损加重,缩短设备的使用寿命。
第二,外界液体进入减速器内部后,与设备内部润滑液混合,降低甚至消除润滑液的降温效果,导致减速器在较高温度下运转,长期下去造成某些零件失效,甚至减速器完全报废。
第三,部分细小杂物颗粒落入设备的连接处,腐蚀密封胶圈或加速其失效,导致液压油外渗,需要频繁添加掘进机工作油,带来经济损失。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展悬臂式掘进机是一种用于地下矿山和隧道等施工中的特种设备,具有高效、快速、安全的特点。
随着现代工程技术的快速发展,悬臂式掘进机导航技术不断更新和创新,以满足不同施工需求。
当前,悬臂式掘进机导航技术主要分为机械导航和电子导航两种形式。
机械导航是传统的导航方式,它通过机械仪器来完成导向工作。
常见的机械导航器包括水平仪、指南针等。
这些仪器通过测量地下隧道的坡度、水平度和方向等,来指导悬臂式掘进机的掘进方向。
机械导航技术简单可靠,适用于较为简单的施工场景。
由于机械导航的精度和灵活性相对较低,无法满足复杂工程的要求。
电子导航是一种基于现代电子技术的导航方式。
电子导航主要通过激光测距、地下物体探测和图像识别等技术来实现。
激光测距技术可以通过测量激光器发射和接收激光的时间差来计算出目标物体的距离,从而确定掘进机的位置。
地下物体探测技术可以通过电磁波的反射和互作用来识别地下通道的结构和障碍物,以及判断是否需要调整掘进机的路径。
图像识别技术可以通过处理激光扫描图像,提取图像特征来重建地下通道的三维模型,从而实现掘进机的精确导航。
目前,悬臂式掘进机导航技术仍然面临一些挑战和问题。
电子导航技术需要高精度的传感器和先进的信号处理算法,以应对地下环境的复杂性和多变性。
当前的技术水平对于灰尘、水汽和岩石碎屑等环境干扰相对敏感,导致掘进机的导航精度有限。
电子导航技术需要高效的数据处理和实时计算能力。
地下施工现场通常存在信号传输延迟和带宽受限的问题,限制了导航系统的实时性和稳定性。
悬臂式掘进机导航技术需要考虑人因工程和作业安全等因素。
在地下环境中,人员的工作室比较狭窄,导航系统需要能够进行精确定位,以避免碰撞和意外事故的发生。
未来,悬臂式掘进机导航技术还可以在以下几个方面进行改进和发展。
可以通过引入机器学习和人工智能等技术,提高导航系统的自主性和智能化水平。
机器学习可以通过对大量地下施工数据的学习和分析,提高导航系统的预测和决策能力,实现更精确和高效的导航。
悬臂式掘进机导航技术现状及其发展

悬臂式掘进机导航技术现状及其发展悬臂式掘进机是一种用于隧道和地下工程的掘进设备。
它通过设备本体的悬臂结构,将主要的掘进设备放置在悬臂部分,实现对隧道内部的掘进作业。
悬臂式掘进机在隧道施工中起到了重要的作用,提高了施工效率,减轻了工人的劳动强度。
随着科技的不断发展,导航技术在悬臂式掘进机中的应用也越来越广泛。
现状:目前,悬臂式掘进机导航技术主要有以下几种:1. 全站仪导航技术:全站仪是一种测量仪器,可以通过测量施工现场的坐标和角度,来判断掘进机的位置和朝向。
全站仪导航技术可以提供高精度的位置信息,但需要专业的人员进行操作,并且需要事先布置测量基准点和测量线,增加了施工的复杂性。
2. 激光导航技术:激光导航技术通过在隧道内部设置激光测量器,利用激光束来测量掘进机的位置和朝向。
激光导航技术可以实时监测掘进机相对于基准线的偏移量,并通过自动调整掘进机的位置和姿态,来保持施工的精度。
3. GPS导航技术:GPS导航技术利用全球卫星定位系统,通过卫星接收器和地面控制站的组合,来提供掘进机的位置和朝向信息。
GPS导航技术具有全天候、全球范围的定位能力,但在隧道内部信号受阻的情况下会受到影响。
发展趋势:随着导航技术的不断发展,悬臂式掘进机导航技术也呈现以下发展趋势:1. 多传感器融合:将多种不同类型的传感器结合起来,可以提高导航系统的精度和鲁棒性。
可以将激光测距仪、惯性测量单元和图像识别技术等多种传感器进行融合,实现对掘进机位置和姿态的准确判断。
2. 三维模型重建:利用激光扫描技术和图像处理技术,可以对隧道内部的三维模型进行重建。
通过与掘进机位置信息的融合,可以实现对施工进度和质量的实时监测和评估。
3. 自主导航技术:自主导航技术是指不依赖外部信号和人工干预,通过控制算法和传感器数据,实现掘进机自主完成导航和施工作业。
自主导航技术可以提高施工的灵活性和效率,减少对人工操作的依赖。
4. 人工智能技术:人工智能技术可以通过对大量数据的学习和分析,提高掘进机导航系统的智能化水平。
悬臂式掘进机回转机构的分析与建模

悬臂式掘进机回转机构的分析与建模发表时间:2014-12-01T16:09:03.560Z 来源:《价值工程》2014年第6月下旬供稿作者:冀俊伟[导读] 通过对截割升降油缸和回转油缸的控制可实现掘进机截割的自动控制。
操控方式的选择需要借助数学模型完成。
Analysis and Modeling of Cantilever Machine Slewing Mechanism冀俊伟JI Jun-wei(中国煤炭科工集团太原研究院,太原030006)(CCTEG Taiyuan Research Institute,Taiyuan 030006,China)摘要院基于悬臂式掘进机回转机构的结构特点,对其液压控制系统的运行原理展开分析,并结合假设条件建立液压元件的基本方程,通过机理建模最后得到了系统的传递函数,为实现掘进机自动控制提供了实用的简化模型。
Abstract: Based on the structure characteristics of slewing mechanism of the cantilever machine, this article analyzes the operationprinciple of its hydraulic control system, and combined with the hypothesis the basic equations of hydraulic components is established, andthe system transfer function is obtained by mechanism modeling finally, which provides a practical simplified model for realizing automaticmachine control.关键词院悬臂式掘进机;回转机构;液控系统;建模Key words: boom-type roadheader;slewing mechanism;hydraulic control system;modeling中图分类号院U455.3+1 文献标识码院A 文章编号院1006-4311(2014)18-0051-020 引言悬臂式掘进机在煤矿巷道掘进中得到了广泛的应用,使掘进效率大大提高,但是目前仍然是手动操作,巷道的成形很大程度上取决于人为因素,经常欠挖或超挖,影响巷道成形质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)
文献综述
学院:机械工程学院
专业:过程装备与控制工程
班级: 2010级108班
姓名:谭体成
学号: 109054393
2014年 3 月 02日
悬臂式掘进机回转台的优化设计文献综述
一选题背景
悬臂式掘进机被广泛应用于掘进铁路隧道、矿山巷道、水利涵洞和地下工程建设。
所以其工作环境复杂恶劣,载荷变化幅度很大,无论是掘进机的行走机构、截割机构、回转机构、装载机构等,都会因掘进机动载荷的加大而出现故障,影响掘进机的工作可靠性。
所以一些关键零部件的设计可靠性成为我们研究的重点。
本课题的研究对象是EBZ-135 型悬臂式掘进机回转台。
在对掘进机整体优化设计中,回转台是掘进机的重要组成部件,它连接机架,支撑截割臂,实现截割头的钻进掏槽、扫落煤岩、截割臂的升降、回转等各项运动,并承受来自截割头的复杂多变的冲击载荷,这些载荷的落脚点均设在回转台机构上,并通过它传递到机架上去。
本身重量很大的截割部件及回转台自重回转时,其轴承必须承受全部的轴向和径向负荷,特别是来自截割头在截割工况中所产生于水平平面方向对轴承的倾翻转矩。
同时在铸造生产时需要的凝固时间长,铸件组织晶粒粗大,易产生缩孔、缩松、裂纹、变形等铸造缺陷。
所以用有限元分析软件对回转台机构进行应力分析,对回转台的初步设计进行强度校核,针对强度薄弱的区域进行结构改进和优化设计是很有必要的。
二国内外目前研究水平
悬臂式掘进机今后发展方向是逐渐扩大其对煤、煤岩、岩石等不同硬度和各种地质条件的适应能力,提高掘进效率,最终实现掘进作业的完全机械化、自动化和无人控制。
掘进机回转机构(以下简称回转机构)是掘进机的关键部件,在它承担工作装置的重量和各种工况下煤岩切割工作过程中的载荷。
目前对它的分析研究较少,已有的研究就是对少数几种机型回转台进行了有限元分析。
目前,对回转台进行的研究较少,以下是国内研究的状况。
安徽理工大学的韩帮强对
EBH-120型掘进机回转台进行设计及用传统的方法[7]对其进行应力分析。
中国矿业大学的黄日恒以AM50型掘进机为例,对回转台的工作原理、受力分析和设计特点进行分析研究,提出回转台是悬臂式掘进机的一个重要部件,回转台设计的基本要求是:1.承载能力大,惯性小,能最损耗少;2.运转平稳,具有足够的强度和刚度;3.结构紧凑,回转角度小,重心降低;4.水平回转时,进给力较小。
三一重型装备有限公司的马月月利用有限元分析技术对回转台的设计结构进行计算,研究回转台受载最恶劣的工况[9],得到详细准确的应力分布,充分反映了回转台的受力特点。
在此基础上,对回转台的结构设计进行强度校核,并对回转台结构进行优化。
辽宁工程技术大学的程佳等人对EBZ-160 型掘进机的回转台进行了受力分析,并利用有限元分析软件(ANSYS)对其进行应力分析,得出最大应力值找出危险截面[10],从而为回转台的优化设计提供了理论依据。
安徽理工大学的张安宁等人以EBZ255掘进机回转台为研究对象,通过对EBZ255 掘机的运动情况分析,得出几种不同典型工况及危险工况,针对具有顶进和回转截割的危险工况下回转台整体和回转台零件进行了力学分析,在此基础上,对回转台进行了有限元分析,得出应力、应变和变形云图,找出了回转台危险点,为该机的改进及优化设计提供指导。
在对回转台的研究中,主要是对回转台进行力学分析,在此基础上,对回转台进行有限元分析,找出回转台危险点,为掘进机的改进及优化设计提供指导。
对回转台的研究尚不成熟,国外一些专家学者对其也有所研究,国外主要生产掘进机的单位[12]有:英国的Anderson公司,Dosco公司、奥地利的奥钢联、德国的保拉特(Paurat)有限公司,阿特拉斯科普柯-埃克霍夫掘进机技术公司(Atlas Copco-Eickhoff Roadheading Techbic Gmbh简称AC-E),威斯特法利亚吕恩公司、前苏联雅西诺瓦斯克机械制造厂、日本三井三池制作所。
这些厂家对回转台的研究基本上代表着国外悬臂式掘进机回转台的技术现状。
三课题研究的主要内容
本课题结合目前掘进机中存在的问题,利用虚拟样机技术为支持,以国内EBZ-135型号的掘进机回转机构为研究对象,应用UG、ADAMS及ANSYS工程应用软件为对其进行研究,主要研究内容如下:
1)回转台与相邻部件的静态干涉的检验。
用UG软件建立EBZ135掘进机回转机构含(回转台、截割机构、回转油缸和升降油缸)各个零部件的模型,然后进行整机装配,建立简化的三维模型,最后进行静态干涉检验。
2)回转机构的动态干涉的检验。
对回转机构进行简化,在UG中以Parasolid 文件格式导出,导入到ADAMS/View环境下,添加各种约束,建立虚拟样机进行运动学仿真及动态干涉检验。
3)将2中截割头的受力加到建立好的虚拟样机上,对回转机构横摆和钻进工况进行动力学仿真。
得出回转台的受力。
4)利用动力学分析结果,在ANSYS中对回转台进行有限元分析。
四参考文献
[1]陶永芹.浅谈悬臂式掘进机发展趋势[J].矿山机械,2005,33(11):13-14.
[2]刘家辉.履带起重机臂架系统动力学仿真[D].大连理工大学,2008.
[3]陈立平等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[4]韩帮强,张安宁.EBH-120型掘进机回转台的设计与应力分析[J].煤矿机械,2007,
[5]黄日恒.悬臂式掘进机[M].徐州:中国矿业大学出版社,1996.
[6]马月月,牛建强,常龙.悬臂式掘进机回转台有限元分析[J].煤矿机械,2008,29
[7]程佳,毛君,张凯等.基于ANSYS的EBZ-160型掘进机回转台力学特性研究[J]..2009,1(2):9-11.
[11]张安宁,彭树权,梁超等.基于Cosmos的EBZ255掘进机回转台力学特性及有限元分析[J].煤矿机械,2009,30(10):86-88.
[12]汪胜陆,孟国营,田劼,赵立新.悬臂式掘进机的发展状况及趋势[J].煤矿机械,2007,28(6):1-3.
[16]应华,熊晓萍,姜春晓等.UG4.0机械设计完全自学手册[M].北京:机械工业出版社,2007.
[18]黄翔,李迎光.UG 应用开发教程与实例精解[M].北京:清华大学出版社,2005.
[26]项阳,陈楠.悬臂式掘进机摆动机构分析与研究[J].煤矿机电,2001,1(3):4-7.
[27]郭迎福,张永忠,刘德顺.截割头横摆时的运动学分析及其仿真[J].煤炭学报,2002,
[29]李晓豁.掘进机截割的关键技术研究[M].北京:机械工业出版社,2007
[30]李晓豁,姜丽丽.掘进机截割硬岩的载荷模拟研究[J].中国工程机械学报,2008,6(4):415-417.。