焊装机器人仿真
全方位移动焊接机器人设计与仿真

摘要摘要本文是在先进的工业自动化发展的背景下,结合了目前自动化技术的发展现状,尤其是工业机器人的发展历史和过程,运用了轮式机器人的特点,研制出一种全方位的移动焊接机器人。
其主要是运用在船舶等具有大型钢结构件的自动化焊接作业中,极大的改善了焊接作业环境。
首先我们结合实际生产焊接作业中的复杂环境分析了机器人的作业对象,以能够在复杂的环境下进行灵活的自动化焊接为目的,主要针对在各种矩形状焊缝中的各个直角的焊接,对机器人的机构进行了选型和设计。
采用新型的小型化高速旋转电弧传感器来进行焊缝的跟踪,超声波等传感器对机器人姿态进行检测。
然后运用机器人运动学理论对所设计的机器人进行了运动学理论分析,验证了其可行性,从理论上说明了机器人设计的合理性。
之后运用ADAMS软件建立机器人的虚拟样机系统,验证了机器人的重量等参数并进行了运动学仿真分析,尤其是对直角运动过程以及模拟实际环境下的运动过程,进一步证实机器人的可行性。
最后将机器人各个零部件进行了加工、安装和调试,并进行了实验的验证。
其初始位姿定位良好,整个运动过程平稳,在原地转向过程中的位置保持非常优秀,基本维持不变,能够完成直角焊接运动,焊接结果良好。
关键词:焊接机器人;全轮转向;嵌入式轮组;旋转电弧传感器ABSTRACTABSTRACTThis paper introduces a wheeled robot based on modern automation technology, In the context of modern industry,especially the development of industrial robots history and process. Use the characteristics of wheeled robots, developed a full range of mobile welding robot. Which is mainly used in ships and other large steel structure with a large number of automatic welding operations, greatly improved the welding operation environment. First of all,we know that the actual production environment of the robot is quite complicated,our aim is to be able to carry out flexible automated welding in this complex environment,we have chosen and designed the robot body by mainly studies the movement of the robot at right angles to the welding process. A new miniature high-speed rotary arc sensor is used to track the weld, ultrasonic and other sensors to detect the attitude of the robot. Then we use the theory to analyze the kinematics of the robot to prove the feasibility of the robot. We use the ADAMS software to build the robot virtual prototype system, simulate and analyze the robot in the kinematics especially for the right-angle motion process and the simulation of the actual environment of the movement process. Finally, the various parts of the robot were processed, installed and debugged, and the experiment was verified. The whole process of movement is very smooth; the performance of the turning in situ is very well, welding results fulfill the requirements.Keywords: welding robot; full-wheel steering; embedded wheelset; rotational arc sensor目录目录第1章绪论 (1)1.1 课题来源 (1)1.2 课题研究背景及意义 (1)1.3 机器人焊接研究现状 (4)1.4 焊缝跟踪传感器 (9)1.5 虚拟样机技术的应用 (12)1.6 本课题目标及研究内容 (13)1.7 本章小结 (14)第2章全方位移动焊接机器人结构设计 (15)2.1 引言 (15)2.2 焊接机器人移动平台选型与设计 (15)2.2.1 移动平台选型 (15)2.2.2 驱动方案确定 (17)2.2.3 嵌入式驱动轮方案 (18)2.2.4 全方位移动焊接机器人平台转向装置设计 (20)2.2.5 移动平台与转向功率估算 (21)2.2.6 吸附模块设计 (23)2.3 末端执行机构设计 (28)2.3.1 全方位机器人焊枪执行机构选型 (28)2.3.2 全方位机器人转动机构选型 (32)2.3.3 全方位机器人水平运动机构设计 (32)2.3.4 垂直运动机构设计 (34)2.3.5 三维精确定位平台建模 (36)2.4 全方位移动焊接机器人硬件系统 (37)2.5 全方位移动焊接机器人建模 (40)2.5.1 嵌入式轮组设计 (40)2.5.2 全方位移动机器人底盘建模 (40)目录2.5.3 全方位移动焊接机器人整体建模 (41)2.6 本章小结 (42)第3章全方位移动焊接机器人运动学分析与轨迹规划 (43)3.1 引言 (43)3.2 机器人运动学简介 (43)3.2.1 机器人运动学运用理论基础 (44)3.2.2 机器人D-H运动学分析 (48)3.3 全方位移动焊接机器人运动学建模 (50)3.3.1 全方位移动焊接机器人平台运动学模型建立 (50)3.3.2 基于Simulink/SimMechanics的运动学模型 (54)3.3.3 全方位移动焊接机器人直角转弯规划 (57)3.4 本章小结 (64)第4章全方位移动焊接机器人仿真分析与实验 (65)4.1 引言 (65)4.2 全方位移动焊接机器人ADAMS仿真分析 (66)4.2.1 全方位移动焊接机器人虚拟样机 (66)4.2.2 全方位移动焊接机器人运动学仿真分析 (68)4.3 全方位移动焊接机器人实验分析 (71)4.3.1 超声传感器定位实验 (71)4.3.2 全方位移动焊接机器人底盘运动实验 (73)4.3.3 全方位移动焊接机器人焊接运动实验 (75)4.4 本章小结 (78)第5章结论与展望 (79)5.1 结论 (79)5.2 展望 (79)致谢 (81)参考文献 (82)攻读学位期间的研究成果 (86)第1章绪论第1章绪论1.1 课题来源本课题来源于面向复杂船舱焊接的自主移动机器人开发与集成应用(2013AA041003),属国家“863”高新技术发展计划先进制造领域项目。
基于UG的弧焊机器人模型装配与运动仿真
第42卷 第6期 2009年6月 天 津 大 学 学 报 Journal of Tianjin University V ol.42 No.6 Jun. 2009收稿日期:2008-07-15;修回日期:2008-10-29.作者简介:冯胜强(1979— ),男,博士研究生,fsq7980@.通讯作者:胡绳荪,huss@.基于UG 的弧焊机器人模型装配与运动仿真冯胜强,胡绳荪,申俊琦(天津大学材料科学与工程学院天津市现代连接技术重点实验室,天津 300072)摘 要:采用UGNX4.0系统对日本安川电机株式会社生产的MOTOMAN-HP6型弧焊机器人进行了整体的模型装配,并建立了三维运动仿真模型.运用UG/OPEN API 提供的二次开发函数,采用VC++6.0进行编程的方法,建立了连杆坐标系下的弧焊机器人运动学模型.阐述了弧焊机器人模型的建立方法、装配方式以及运动仿真,从而为Unigraphics (UG )环境下的离线编程技术打下了良好的基础. 关键词:弧焊机器人;离线编程;Unigraphics ;装配;运动仿真中图分类号:TP242 文献标志码:A 文章编号:0493-2137(2009)06-0518-05Model Assembly and Motion Simulation of ArcWelding Robot Based on UGFENG Sheng-qiang ,HU Sheng-sun ,SHEN Jun-qi(Tianjin Key Laboratory of Advanced Joining Technology ,School of Materials Science and Technology ,Tianjin University ,Tianjin 300072,China )Abstract :With UGNX4.0,the assembly of solid model was taken and then 3D motion simulating model of MOTOMAN-HP6 arc welding robot made by YASKAWA Electric Corporation in Japan was established. The kinematics model of arc welding robot under link-pole coordinate system was established by the second development function offered by UG/OPEN API and by the method of programming using VC++6.0. The model founding method and assembly types and motion simu-lation were introduced ,which provides a good basis for off-line programming technique under UG condition. Keywords :arc welding robot ;off-line programming ;Unigraphics ;assembly ;motion simulation弧焊机器人的建模以及实体模型的装配和三维运动仿真是弧焊机器人离线编程系统中重要的组成环节,这几项工作的成功与否直接影响到后续工作的进行,因此是国内外科研机构研究离线编程系统的重点.当前,对于系统建模、运动仿真的研究比较常用的开发工具有Solid Edge 、AutoCAD 、VBA 、OpenGL 、SolidWorks 和Pro\E 等,它们在三维实体造型、动画仿真和系统的二次开发等方面具有各自特点[1-5]. 在国外,弧焊机器人的运动仿真技术已经比较成熟,并且已经形成了一些机器人仿真系统,如GRASP 、SAMMIE 和CGSROB 等.但是,这些仿真系统的差别都不是很大.从发展方向上来看,都是朝 着智能化的方向发展,编程方法越来越简单,对操作人员的要求也会随之降低;从功能上来看,这些仿真系统都提供了几何建模功能、运动学建模功能、单元布局功能、路径规划功能、自动编程功能以及仿真功能.除此之外,国外所研究的仿真系统中比较突出的一个功能就是多机协调编程与仿真功能,这项功能是一般仿真系统所不具备的[6-9] . 在国内,华南理工大学、清华大学、哈尔滨工业大学以及北京工业大学都对这方面进行了研究,并且取得了一定的成果[10].其中,哈尔滨工业大学在此方面的研究具有一定的连续性和系统性,并且也是国内对此项研究进行最早的单位.最初阶段,哈尔滨工业大 学开发了机器人弧焊CAD/CAM 系统,但是该系统的功能比较简单.最近两年,该校选择了SolidWorks2009年6月冯胜强等:基于UG的弧焊机器人模型装配与运动仿真 ·519·作为开发平台,采用COM和ATL等编程技术,从实用角度出发,研制了功能比较全面的机器人弧焊离线编程系统[11].但是,该系统还未真正应用于实际工作,目前正在对其实际应用进行研究[12].综上所述,笔者选择Unigraphics(UG)作为开发平台,利用其强大的功能实现弧焊机器人的模型装配以及运动仿真,为后续工作打下良好的基础.1 仿真系统介绍采用日本安川电机株式会社生产的MOTO-MAN-HP6型弧焊机器人作为研究对象,在UG平台上对机器人主体、变位机以及被焊工件进行实体建模,用VC++6.0进行二次开发,实现了弧焊机器人的运动仿真.其过程如图1所示.图1弧焊机器人运动仿真系统Fig.1Motion simulation system of arc welding robot选择UG作为系统的开发平台,主要是因为UG 有着其他CAD软件无法比拟的优点:①它基于完全的实体复合建模、特征建模和装配建模技术,已经成为航空航天、汽车、机械、计算机及外设、家用电器等领域的首选软件,是目前应用最为广泛的软件之一;②UG软件提供了CAD/CAE/CAM业界最先进的被称为UG/Open的开发工具,它以开放性架构面向不同的软件平台提供灵活的开发支持;③利用UG/Open 提供的应用程序和开发工具,用户可以在其提供的平台上开发出适合自己需要的CAD产品;④UG/Open 封装了近2000个函数,可以完全满足用户二次开发的需要.本研究采用的MOTOMAN-HP6型弧焊机器人具有6个自由度,并且6个关节均为旋转关节.如图2所示,其中S轴、L轴和U轴在运动中决定了焊枪的位置,而R轴、B轴和T轴则决定了焊枪的姿态.为了分析机器人在运动过程中的正、逆解问题,在每个连杆上固定一个坐标系,并且运用denavit-hartenberg (D-H参数)方法来保证各个连杆空间的正确位置.在弧焊机器人建模过程当中,必须保证各连杆的D-H参数.各个连杆的仿真运动参数如表1所示.图2具有6自由度的MOTOMAN-HP6型弧焊机器人模型Fig.2Model of MOTOMAN-HP6 arc welding robot with six degree of freedom表1各个连杆的运动仿真参数Tab.1Parameters of motion simulation of each link-pole 轴速度范围/(°)最大速度/(rad·s-1) S(旋转轴)±170 2.62L(下臂) +155~-90 2.79U(上臂) +250~-1752.97R(滚动轴)±180 5.93B(倾斜轴) +225~-45 5.93T(扭转轴)±360 9.082 弧焊机器人各模块三维模型的建立及其装配2.1 弧焊机器人各模块三维模型的建立在进行弧焊机器人的装配之前,必须建立弧焊机器人的三维模型.所谓弧焊机器人设备建模,就是要在计算机上首先“绘制”出机器人的3D模型,然后分别定义模型的各个关节的属性,通过定义这些属性,可以控制机器人的模型,使之成为离线编程所需要的实体.在本研究中,“绘制”并不是传统意义上所认为的在UG平台下进行绘制,而是在了解弧焊机器人各轴的实体尺寸的前提下,首先在VC下利用UG/Open API提供的大量函数进行编程,生成一∗.dll 文件,然后在UG下运行这个文件,便可以生成一个弧焊机器人的整体或者是某一个轴的模型.以焊枪为例,给出了其程序,如下所示:static void do_ugopen_api_gunADD(void)·520·天津大学学报第42卷 第6期{UF_FEATURE_SIGN GA = UF_NULLSIGN; //挂钩中部连接长方体UF_FEATURE_SIGN GA1 = UF_POSITIVE; //挂钩上部长方体UF_FEATURE_SIGN GA2 = UF_POSITIVE; //挂钩回转体double blockGA1_orig[3] = {-40.0,-545.0-y,z-815.0};//挂钩长方体的中心char ∗blockGA1_len[3] = {"80","15","80"}; //挂钩长方体的三边长度tag_t blkGA1_obj;UF_CALL(UF_MODL_create_block1(GA1,blockGA1_orig,blockGA1_len,&blkGA1_obj));.........UF_CALL(UF_MODL_create_revolution1(generatorsS,7,trim_dataS,body_limitS,offsetsS,originS,false,true,originS,directionS,gun1,cylT_obj_id,&objectsS,&obj_countS));}将以上程序在VC中进行编译,编译后生成一∗.dll文件,在UG中执行这个文件,可以生成焊枪的模型,如图3所示.图3焊枪的模型Fig.3Model of blowtorch运用同样的方法,可完成MOTOMAN-HP6型弧焊机器人各个模块的实体模型.由于篇幅所限,在此不再对各个模块程序的编写过程进行赘述.2.2 弧焊机器人各模块三维模型的装配当把弧焊机器人所有的模块通过程序“绘制”出以后,需要对这些零件模块进行装配.装配过程是在装配中建立部件之间的引用关系的过程[13].在UG NX4.0系统中,常用的装配方式有两种:①自底向上的装配,即预先设计好部件几何模型,再将模型添加到装配中,这种装配方法应用较为广泛;②自顶向下的装配,即先创建一个新的组件,再在此组件中建立几何对象.然而,在实际操作中,两者可以组合使用.因为各个零件的复杂程度不一样,所以装配关系也不尽相同,用户可以选择任意一种情况.一般来讲,通常选用比较复杂的一个零件作为父部件,通过这个父部件连接多个子部件.一旦各个零件之间建立了装配关系,随动关系也同时建立,即父部件运动时,可以带动其他的子部件一起运动.此系统可以使任何复杂的零件之间实现装配,并且如果用户指定了一个错误的父部件时,部件的正确运动方式就会自动进行调解,以保证模型能够正确的运动.机器人的装配模型如图4所示.图4机器人的装配模型Fig.4Assembly model of robot3 弧焊机器人的运动仿真当把机器人的各个模块进行装配,形成一个完整的弧焊机器人实体模型以后,便可以进行三维图形的运动仿真.但是在进行运动仿真以前,首先定义大地为刚体,作为其他运动连杆的参照.文献[14]认为,机构是一组连接在一起运动的连杆的集合.就本研究而言,弧焊机器人就是由若干个连杆组成的机构.首先,对MOTOMAN-HP6型弧焊机器人主体运动特点及其自由度进行分析.由于机器人主体部分的运动较为复杂,按其运动属性将机器人主体分为7个部分(基座以及6个轴),并应用简单的几何实体体素(回转体以及长方体)进行模拟,7个独立部分的组装配合完成机器人主体6个运动轨迹的组合,即6个自由度的组合.各部分具体名称及其运动分析如表2所示.2009年6月冯胜强等:基于UG的弧焊机器人模型装配与运动仿真 ·521·表2机器人主体建模各部分及其运动分析Tab.2Parts of robot solid model and motion analysis建模名称运动方式函数名称基座基座相对于大地在水平面内静止do_ugopen_api_base()S轴S轴相对于基座中心线在水平面内旋转do_ugopen_api_robot1()L轴L轴一端与S轴装配并可相对S轴在竖直面内摆动do_ugopen_api_robot2()U轴U轴与L轴另一端装配并可相对于L轴在竖直面内摆动do_ugopen_api_robot3()R轴R轴可绕U轴的水平轴线旋转do_ugopen_api_robot4()B轴B轴一端与R轴装配并可相对于R轴在竖直面内摆动do_ugopen_api_robot5()T轴T轴相对于B轴下端面中心轴线旋转do_ugopen_api_robot6()其次,创建连杆,选择弧焊机器人的各个刚体为连杆.根据弧焊机器人的实际运动情况,选择各个刚体为不同的连杆.再次,当连杆创建完以后,就需要在各个连杆之间创建运动付(joint)来约束相邻连杆的运动情况,每增加一个运动付,便会增加一次运动的约束.相比之下,创建运动付要比创建连杆复杂得多.因为,在创建运动付时要同时确定运动付的驱动类型,如无驱动(none)、恒定驱动(constant)、简谐运动驱动(harmonic)、通用运动函数驱动(general)和关节运动驱动(articulation)等.除此之外,还要定义运动付的类型,一般情况下,弧焊机器人模型基座(base)与大地(ground)之间的运动付类型是固定付(fixed);弧焊机器人基座(base)与连杆之间以及各连杆之间均为旋转付(revolute joint).最后,可以对模型进行多种仿真分析操作,用来直接观察弧焊机器人模型的运动情况.在UG中,如果把创建运动仿真(创建连杆、运动付和定义运动驱动)叫整个分析过程的前处理(pre-processing)阶段,那么运动模块解释ADAMS(嵌入式解算器)的输出数据文件,并转换成三维动画,这一过程就叫做后处理(post-processing)阶段[14].本研究所采用的MOTOMAN-HP6型弧焊机器人的运动仿真图形如图5所示.图5中反映了整个弧焊机器人离线编程系统的主要设备,左下部位为变位机的模型.图5弧焊机器人运动仿真图形Fig.5Graphics of motion simulation of arc welding robot 4 结 语运用UGNX4.0作为开发平台,VC++6.0为开发工具,建立了MOTOMAN-HP6型弧焊机器人的三维仿真模型.在建立模型的基础上,进行了弧焊机器人各个连杆的装配与运动仿真分析,从而提高了模型的精度,达到了提高工作效率的目的.对弧焊机器人进行装配与运动仿真的分析,为离线编程系统后续工作奠定了基础.参考文献:[1]唐新华,Paul Drews. 机器人三维可视化离线编程和仿真系统[J]. 焊接学报,2005,26(2):64-68.Tang Xinhua,Paul Drews. 3D-visualized off-line pro-gramming and simulation system for industrial robots[J].Transactions of the China Welding Institution,2005,26(2):64-68(in Chinese).[2]王志江,何广忠,高洪明,等. 基于SolidWorks的焊接特征建模系统[J]. 焊接学报,2006,27(4):57-60.Wang Zhijiang,He Guangzhong,Gao Hongming,et al.Feature-based modeling system for welding on Solid-Works platform[J]. Transactions of the China Welding In-stitute,2006,27(4):57-60(in Chinese).[3]刘 彤,吴 林,田劲松,等. 基于AutoCAD的焊接结构特征建模[J]. 哈尔滨工业大学学报,2000,32(9):25-28.Liu Tong,Wu Lin,Tian Jinsong,et al. Feature-basedmodeling for welding structure on AutoCAD plat-form[J]. Journal of Harbin Institute of Technology,2000,32(9):25-28(in Chinese).[4]熊震宇,陈焕明,葛 杨. 基于ADAMS的弧焊机器人运动仿真[J]. 计算机工程与应用,2005,41(11):166-167.·522·天津大学学报第42卷 第6期Xiong Zhenyu,Chen Huanming,Ge Yang. Simulation ofarc welding robot motion based on ADAMS[J]. Com-puter Engineering and Applications,2005,41(11):166-167(in Chinese).[5]邓 宇,梁飞华,岑 健,等. VBA及MATLAB环境下焊接机器人计算机图形仿真系统的开发[J]. 机电工程技术,2005,34(1):89-91.Deng Yu,Liang Feihua,Cen Jian,et al. The computersimulation of robot under the environment of VBA andMATLAB[J].Mechanical and Electrical EngineeringTechnology,2005,34(1):89-91(in Chinese).[6]Owens John. Task planning in robot simulation [J]. In-dustrial Robot:An international Journal,1996,23(5):21-24.[7]Owens John. Microcomputer-based industrial robot simu-lation and off-line programming system [J]. RoboticToday,1995,18(7):1-3.[8]Harrison J P,Mahajan Rakesh. The IGRIP approach to off-line programming and workcell design [J]. RoboticToday,1986,8(4):25-26.[9]Breat J L,Clemcnt F,Jadeau P,et al. ACT WELD—An unique off-line programming software tailored for roboticwelding applications [J]. Welding in the World,1994,34(3):267-274.[10]林 君,殷树言,陈志翔,等. 弧焊机器人图形仿真系统的研究[J]. 制造业自动化,2003,25(3):49-51.Lin Jun,Yin Shuyan,Chen Zhixiang,et al. Study ongraphics simulation system of arc welding robot [J].Manufacturing Automation,2003,25(3):49-51(in Chi-nese).[11]何广忠. 机器人弧焊离线编程系统及其自动编程技术的研究[D]. 哈尔滨:哈尔滨工业大学材料学院,2006.He Guangzhong. Robot Arc Welding Off-Line Program-ming System and Automatic Programming Technique[D]. Harbin:School of Material Science andEngineering,Harbin Institute of Technology,2006(inChinese).[12]刘圣祥. 弧焊机器人离线编程实用化研究[D]. 哈尔滨:哈尔滨工业大学材料学院,2007.Liu Shengxiang. Study on the Utilization of Robotic ArcWelding Off-Line Programming Technology [D].Harbin:School of Material Science and Engineering,Harbin Institute of Technology,2007(in Chinese). [13]侯永涛,丁向阳. UG/Open API 二次开发与实例精解[M]. 北京:化学工业出版社,2007.Hou Yongtao,Ding Xiangyang. UG/Open API SecondaryDevelopment and Examples Interpretation [M]. Beijing:Chemical Industry Press,2007(in Chinese).[14]胡小康. UGNX4运动分析培训教程[M]. 北京:清华大学出版社,2006.Hu Xiaokang. UGNX4 Motion Analysis Training Tuto-rial[M]. Beijing:Tsinghua University Press,2006(inChinese).。
利用SOLIDWORKS实现焊接机器人设计和仿真

2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
点焊机器人仿真模拟分析讲解

主题:以统计分析的方法,对机器人仿真的结果进行优化。
机器人仿真模拟是概念设计阶段,对机器人工作站进行工艺方案设计时,所采用的一种手段或者表达方法。
仿真软件能够做到的是:通过对机器人各轴运动范围的限制,定义工具的可达范围,通过干涉检查功能避免干涉产生。
通过补间方式及速度参数的设置核查动作时间乃至输出离线编程所需要的代码文件。
三维动画的视觉效果给人以直观的感觉。
然而这些仅能说明可达,并不能说明合理或者最优。
机器人工作站方案设计的目的是针对产品的工艺需求,将机器人、工具、工装这三个设备形成最佳的组合与布置。
仅能够说明可达的手段不足以实现要达到的目的。
连续播放三维动画的任一瞬时,所展现的只是运动过程中的某一姿态。
满足所有姿态的最佳组合与布置,在缺少必要的数据统计或者表达方法的情况下,仅能凭记忆中的想象结合经验作出判断,这说明了手段上的欠缺。
所以有必要通过统计分析的方法,对机器人仿真的结果进行优化。
如果对机器人的每一个姿态,进行综合描述,所呈现出的是离散性的分布。
离散度的减小以及将分布中值点调整至最佳点是对于分布的优化。
也就是达到形成最佳组合与布置目的手段。
一、方案设计时需要重点考虑的问题:1)明确工艺操作内容:对于由多台机器人组成的生产线或者工作站而言,存在着工艺操作分工的问题。
在全部工艺操作要求中,重点关注不易于达到的焊点分布与实现方式。
将难点分解到每个工位的每个机器人(或操作人),行成初步方案构想。
结合装件、搬运、工装等动作时间因素。
以各工位动作周期时间均衡为目的,测算出计划分配给每个机器人焊接的数量。
在初步方案的基础上,再将其它焊点予以分配。
2)机器人选型:a、采用普通型还是下探型机器人;b、机器人的运动范围,必要时采用行走外部轴或者夹具运动。
c、机器人的搬运能力。
是指如果工具重心在以六轴中心为圆心,以一定数值为半径,在工具安装侧行程的半球范围内,机器人仍能够在其可达范围内达到额定速度时,所能承受的最大重量。
机器人焊接工作站的设计与仿真选题理由及主要内容

机器人焊接工作站的设计与仿真选题理由及主要内容机器人焊接工作站的设计与仿真选题理由及主要内容选题理由:随着技术的发展和人们对生产的要求,越来越多的工厂将焊接过程自动化,机器人焊接工作站将成为未来工业生产中必不可少的设备。
相比传统的焊接工艺,机器人焊接具有更高的精度、更低的耗能和更优良的焊接效果,是当今各种工业生产中不可或缺的一种新型设备。
本次选题,我们将研究机器人焊接工作站的设计与仿真,具体内容如下:一、机器人焊接工作站的设计:1.焊接机器人的类型选择:根据焊接工作的具体条件,选择合适的机器人,考虑其精度、运动能力及安全性等因素,确定最佳的设计方案;2.焊接机器人的结构设计:设计合理的机器人结构,避免变形,保证机器人焊接时能够达到预期的效果;3.焊接机器人的控制系统设计:定义机器人的动作模式,设计合理的控制系统,使机器人能够实现意图控制;4.焊接机器人的安全性设计:分析可能出现的危险因素,设计安全保护措施,以避免出现意外意外。
二、机器人焊接工作站的仿真:1.建立机器人的动力学模型:基于机器人结构和控制系统的设计,利用动力学原理构建机器人的动力学模型;2.建立机器人的仿真模型:利用虚拟仿真技术,利用机器人的动力学模型构建机器人的仿真模型;3.进行机器人焊接仿真:针对不同的焊接工况,进行机器人焊接仿真,对比实验,调试机器人的控制参数,调整机器人结构以及安全措施等;4.进行机器人可靠性仿真:利用虚拟仿真技术,利用机器人的动力学模型,考虑不同的外部环境条件,进行可靠性仿真,确定机器人的安全和可靠性。
以上就是机器人焊接工作站的设计与仿真选题理由及主要内容。
本选题的目的是在利用虚拟仿真技术研究机器人焊接工作站的可行性,进而确保机器人焊接工作站的安全性、精准性和可靠性。
工业机器人虚拟仿真技术第9章 工业机器人焊接应用仿真案例
二、知识储备-Program程序调用
步骤2:“主程序”中添加指令,选择“Program Call Instruction”,输入“程序1” 或通过“Select Program”选择程序1。
二、知识储备-Program程序调用
步骤3:重复上述步骤,完成主程序调用程序2。
二、知识储备-G代码生成机器人程序
本案例将采用焊接轨迹G代码生成机器人焊接程序,RoboDK中G代码生成机器人程序的 步骤如下:
步骤1:构建一个简单的机器人应用工作站,如下图所示。
二、知识储备-G代码生成机器人程序
步骤2:菜单栏→实用程序→Robot Machining Project,创建机器人加工项目
Robot Machining Project
构建工作站的步骤5:导入焊接工件,并安放在工件坐标系“weld_frame”下,焊接工 件的位置采用初始零位。
焊接工件安放在weld_frame下
焊接工件的位置
三、机器人焊接应用仿真案例-仿真编程
本案例机器人焊接应用仿真程序主要包括机器人焊接程序和机器人清枪程序 机器人焊接程序分为两部分:焊接程序1和焊接程序2,完成机器人焊接轨迹 本案例最后用一个主程序调用机器人焊接程序和机器人清枪程序,完成焊接应用仿真 本案例中机器人焊接轨迹分为两部分:焊接轨迹1和焊接轨迹2
三、机器人焊接应用仿真案例-仿真编程
步骤7:机器人清枪程序的创建。本案例中清枪流程:机器人移动到起始点→机器人 移动到预清枪位置→机器人移动到清枪位置→机器人发送清枪信号→等待清枪结束信号→ 机器人返回起始点
目标点 起始点
目标点类型 坐标系值(X, Y, Z, RZ, RY, RX) 参考坐标系
关节变量 [0,-45,0,0,90,0]
利用SOLIDWORKS实现焊接机器人设计和仿真_何杏兴
2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
焊接机器人的建模与仿真
XI’A N TECHNOLOGICAL UNIVERSITY考核科目:机电系统仿真技术学生所在院(系):机电工程学院学生所在学科:机械制造及其自动化考核题目:焊接机器人的建模与仿真学生姓名:贾川学生学号:1402210034学生班级:S14020012015年1月3日焊接机器人的建模与仿真以焊接机器人为例,介绍在ADAMS环境中进行模型建模和约束的添加,以及对建立好的模型进行仿真分析,对模型进行优化。
1 模型分析焊接机器人(如图1所示)由底座、躯干、肩构件、手臂、手腕、机械手六部分构成,各个构件由旋转副联接。
本焊接机器人有5个自由度,可以完成对复杂空间位置的工件的焊接工作。
图1 焊接机器人模型如图所示,机械手的位置由这些构建间旋转副旋转角度决定,每个旋转副将添加旋转驱动,并由电脑程序控制它们的远动。
在本章的实例中将介绍怎么在ADAMS 2013中模拟焊接机器人的工作,进行运动学仿真,并测量机械手焊接点的位置变化曲线。
2 创建模型2.1 启动ADAMS并设置工作环境(1)启动双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“新建模型”,在模型名称栏中输入:welding_robot ;在重力名称栏中选择“正常重力(-全局Y轴)”;在单位名称栏中选择“MMKS –mm,kg,N,s,deg”。
如图3所示。
图3 adams 启动设置界面图图4 网格参数设置对话框(2)设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置下拉菜单中的工作格栅命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成1000mm和1000mm,间距中的X和Y都设置成25mm。
然后点击“确定”确定。
如图4所表示。
用鼠标左键点击选择(Select)图标,控制面板出现在工具箱中。
用鼠标左键点击动态放大(Dynamic Zoom)图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
【论文】焊接机器人运动学仿真及上机运算
第一章 绪论1.1 选题背景科学技术是第一生产力,各国之间综合国力的竞争,很大程度上取决于高技术之间的竞争,作为机电一体化的最高成就——机器人技术作为高技术的一个重要分支普遍受到了各国政府的重视。
上世纪80年代中期以来,机器人技术在新技术革命中起着先锋作用,工业机器人总数每年以30%以上的速度在增长。
在智能机器人的研究与开发方面,美国国防部提出了自主路行车计划,仅花在无人机上的费用就达25亿美元,欧洲尤里卡计划提出了自主机器人计划,而日本继“极限作业机器人”和“微机械技术”开发计划之后,正在实施“人型机器人计划”,强调从广泛意义上去理解机器人,把有关机器人的技术总称“机器人技术(RT)”,构筑RT产业战略。
我国政府也非常重视机器人的研究,国家七五科技攻关计划及“863”计划把工业及智能机器人列入高技术发展计划,取得了令人瞩目的成就。
在20世纪70年代后机器人的研究得到迅速而广泛的普及,机器人进入实用化时代,这主要得益于计算机与人工智能的发展。
1979年Unimation公司推出了PUMA系列工业机器人。
是技术较为先进的的机器人,同年日本研制成具有平面关节的SCARA 型机器人,80年代,机器人发展成为具有各种移动机构、通过传感器控制的机器。
工业机器人进入普及时代,开始在汽车、电子等行业的到大量使用,推动了机器人产业的发展。
为满足人们个性化的要求,工业机器人的生产趋于小批量、多品种。
90年代初期,工业机器人的生产与需求进入了高潮期,1990年全世界机器人使用总台数已有30万台左右,1991年在世界上已有53太工业机器人,其中高性能的机器人所占比例不断增加,特别是各种装配机器人的产量增加较快,出现了具有感知、决策动作能力的智能机器人,和机器人配套使用的机器视觉技术和装备也得到了迅速发展。
机器人技术是21世纪具有创新活力、可持续发展的、对国民经济和国家安全具有战略地位的高技术。
机器人的应用越来越广泛,特别是工业机器人的应用呈现出一种普及化趋势,其他机器人的从研制到开发,也已逐步走向实用化[1]。
汽车焊装中机器人焊接仿真技术的应用进展

1 汽车焊装 机器 人仿真技术概述
1 . 1 汽 车焊装机器人结构简介 焊接机 器人 一般是 六轴 式结构 ,具体包 括 以下 部分 :1 )机 座。 运作 时可 能遇到的干扰 因素 ,对焊接方案 的可 靠性做 出客观 、真 实的 机 座是焊接机器 人的基础部 分 ,具有支撑作 用。其中 ,固定型机 器人 评估 。然后 ,在此基础上 ,不断调整方案设置 ,对其进行反 复优 化 , 直接 安放在地面上 , 而 移动型机器人需要安设在移动结构 上; 2 ) 臂部 。 最终使该方案具有足 够高的稳定性与可靠性 。
案 ,否则会 增加焊机操作 的失误率 ,使企业 蒙受巨大的经济 损失。可 通过 D T P S 软件对机器人 的焊接动作进 行模拟 ,在计 算机 上完成焊 枪 角度 的调整 ,并熟悉机器人 的焊接动作路线及 活动范围 ,分析机器 人
臂 部起 到连接机 身与手腕 的作用 ,它可 以调整 手部的空 间位置 ,辅助 ( 2 )机器 人 节拍计算 及协调模 拟。为 了妥善处 理成本 与效率 两 机 器人进 行作 业 ,同时将各类 载荷 转移至 机座 ;3 )手腕 。手腕起 到 者的关 系 ,提高焊接 系统 的工作效率与水平 ,可令 多 台机器人 同步开 连 接手部与手臂 的作用 ,它可以调整手部 的空间方 向,同时将手 部荷 展作业 , 但 机器人数量并 非越多越好 ,在确定 机器人 的具体数量 时 , 载 传递 至手臂 ;4 )手部 。手 部是装 载操 作机构 的部分 ,机器人 的各 必须对 多方面 因素 加以统筹考虑 。可利用 D T P S 软 件 ,在系统终 端完 类 焊接作业都要通过手部来 完成。 1 . 2 汽车焊装机器 人焊 接仿真的工作流程 以 日本松 下的焊接机器人 为例 ,该系列机器 人大多是示教再 现式 机器人 , 示教 即通过人 工导引、示教盒等方式使机器人 完成某种动作 , 该 动作可 以被 示教程序 自动编程并保存在控 制系统之 中,当运行该程 序 时 ,便可使 机器人反复再 现这一动作 。对 机器人进行焊接 操作的示 教 以后 ,机器 人可按预先设 计好的动作顺序 来执行焊接任 务。松下企 成相 关示教编程 ,并借 助软件的实时监 控和 播放功能 ,分析各 机器人 之 间操作的协调性 ,确认 其是否存在 冲突 ,然后将焊接速率 、焊接效 率等一 一记录下来 。值得 注意的是 ,顾客对 于节拍、效率等参数 通常 有较严格 的要求 ,因此在进 行焊接模拟仿真 之前 ,要事先咨 询客 户对 节拍 方面的要求 ,以防因意见分歧而产 生矛盾 。此外 ,有关 技术部 门 应将程 序的播放过程 录制下来 ,并保存 相关视频资料 ,从而 为后期的 模拟仿真研 究提供 参考。
焊接机器人导轨的动力学建模与仿真分析

焊接机器人导轨的动力学建模与仿真分析焊接机器人在现代制造业中扮演着重要的角色,它的高效率和高精度帮助企业提升了生产效率。
而焊接机器人导轨作为机器人运动的基础,对其动力学建模和仿真分析具有重要意义。
本文将从动力学建模和仿真分析两个方面探讨焊接机器人导轨的特点和方法。
一、焊接机器人导轨的动力学建模焊接机器人导轨的动力学建模是研究该系统运动特性的基础。
首先,我们需要了解焊接机器人导轨的结构和工作原理。
焊接机器人导轨主要由导轨、导轨车、焊接枪等组成,其运动是通过电动机驱动,并受到各种力和力矩的作用。
为了建立动力学模型,我们需要考虑以下几个方面:1. 运动学模型:根据导轨的几何形状和焊接机器人导轨的运动自由度,建立运动学模型,描述焊接机器人导轨的位置和姿态。
2. 动力学模型:考虑电动机和摩擦力的作用,建立动力学模型,描述焊接机器人导轨的加速度和速度。
3. 控制系统:考虑到焊接机器人导轨要完成各种任务,需要设计相应的控制系统,包括轨迹规划和控制算法等。
二、焊接机器人导轨的仿真分析仿真分析是验证动力学模型的有效手段,通过仿真可以观察焊接机器人导轨在各种工况下的运行情况,对系统性能进行评估和改进。
在进行仿真分析时,我们可以考虑以下几个方面:1. 运动轨迹分析:通过仿真分析,观察焊接机器人导轨在不同的运动轨迹下的运动情况,包括速度、加速度和位移等,以及对应的电机功率和摩擦力。
2. 系统响应分析:仿真分析可以模拟焊接机器人导轨在不同外部力和力矩作用下的响应情况,观察系统的稳定性和鲁棒性,并做出相应的改进。
3. 能耗分析:通过仿真分析,可以评估焊接机器人导轨的能源消耗情况,为节能和性能优化提供参考。
通过动力学建模和仿真分析,我们可以更好地理解焊接机器人导轨的运动特性,并对系统进行优化改进。
这不仅可以提高焊接机器人导轨的运动精度和稳定性,还可以降低能源消耗,提高生产效率。
综上所述,焊接机器人导轨的动力学建模和仿真分析对于提高焊接机器人导轨的运动性能和系统可靠性具有重要意义。
钢轨焊接机器人运动过程仿真与实现的开题报告

钢轨焊接机器人运动过程仿真与实现的开题报告1. 研究背景和意义钢轨焊接机器人是一种能够自主运动、携带电焊设备,对钢轨进行实时焊接的智能机器人。
随着高速铁路的建设,钢轨焊接机器人的自动化程度和作业效率成为了很多研究者关注的焦点。
运动仿真是机器人研发的一个重要环节,可以在运动规划、轨迹优化和控制器设计等方面起到优化作用,提高机器人的工作精度和效率。
因此,研究钢轨焊接机器人的运动仿真,对于钢轨焊接机器人的研发和应用具有重要意义。
2. 研究内容和目标本课题将对钢轨焊接机器人的运动过程进行仿真和实现。
具体来说,将从以下几个方面进行研究:1)建立钢轨焊接机器人运动模型:针对钢轨焊接机器人的运动特点,建立运动学模型和动力学模型,为后续仿真研究提供基础。
2)实现钢轨焊接机器人的运动控制器:根据建立的运动模型,设计和实现钢轨焊接机器人的运动控制器。
3)开发钢轨焊接机器人的运动仿真软件:使用仿真软件对钢轨焊接机器人的运动过程进行仿真,并进行分析评估,优化机器人的运动性能。
3. 研究方法和技术路线针对本课题的研究目标,将采取以下研究方法和技术路线:1)研究文献资料:对钢轨焊接机器人的运动特点、运动模型和仿真技术进行综述研究,为后续研究提供支持和参考。
2)分析机器人运动特点:分析钢轨焊接机器人的运动特点,建立机器人的运动学模型和动力学模型。
3)设计机器人运动控制器:根据运动模型和控制需求,设计并实现钢轨焊接机器人的运动控制器。
4)开发运动仿真软件:使用机器人仿真软件对钢轨焊接机器人的运动过程进行仿真,并对仿真结果进行分析优化。
4. 预期结果和意义通过对钢轨焊接机器人运动过程的仿真和实现,可以实现如下目标:1)建立钢轨焊接机器人运动模型,为后续控制器设计和仿真研究提供基础。
2)实现钢轨焊接机器人的运动控制器,使机器人能够实现自主运动和焊接操作。
3)开发钢轨焊接机器人的运动仿真软件,对机器人的运动性能和控制策略进行评估和优化。
5焊接仿真及调试
5.5仿真及调试
完成路径创建后,即可进行仿真及调试。
通过仿真演示,用户可以直观地看到机器人的运动情况,为后续的项目实施或者优化提供依据。
RobotStudio仿真软件还提供了仿真录像、视图录制和打包等功能,以方便用户之间进行交流讨论。
5.5.1 工作站仿真演示
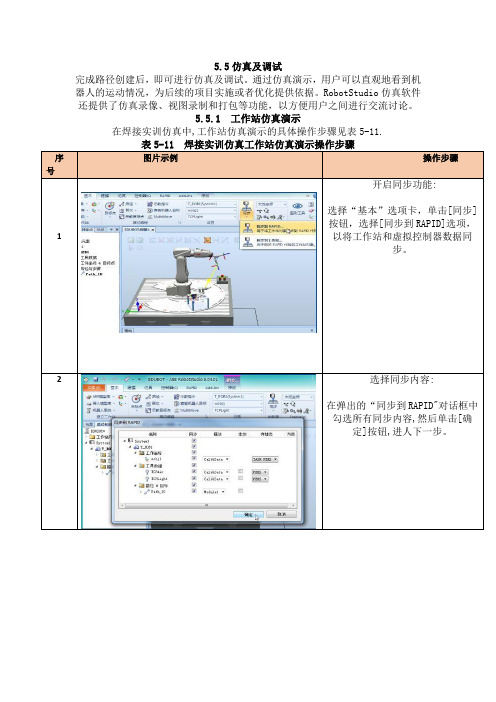
在焊接实训仿真中,工作站仿真演示的具体操作步骤见表5-11.
5.5.2 仿真录像
在焊接实训仿真中进行仿真录像的具体操作步骤见表5-12。
表5-12焊接实训仿真中仿真录像操作步骤
5.5.3录制视图
5.5.4打包工作站
工作站打包文件可以在不同计算机上的RobotStudio软件中打开,以方便用户间的交流。
在焊接实训仿真中打包工作站的具体操作步骤见表5-14。
PDPS机器人虚拟调试 弧焊仿真 第六课 机器人弧焊仿真示教

PDPS机器人虚拟调试弧焊仿真第六课机器人弧焊仿真示教接着上一讲,弧焊焊道创建完成后,开始机器人焊接仿真示教。
1、创建弧焊操作:将上一课创建的焊道重新命名,以便于区分。
选择OP10工位新建连续特征操作(用于弧焊、激光焊接、涂胶等操作),然后输入操作名称、选择机器人和对应的焊道后确定,完成弧焊操作创建,如下图所示;2、焊道投影命令:选择刚刚创建的弧焊操作,然后点击工具栏工艺一栏下面的投影弧焊焊缝命令,如下图所示;3、焊道投影平面选择:在投影弧焊焊缝对话框中,直接双击或者先选择底面/侧面图标(图中1),然后点击编辑按钮(图中2),弹出编辑制造特征数据对话框,选择投影到面,然后按下图所示的顺序选择焊道的底面和侧面,确定;4、焊道投影:焊道投影平面全部选择完成后如下图所示,在投影弧焊焊缝对话框中,可以进行一些参数的设定,设定完成后点击项目开始投影,弹出对话框选择是;5、投影完成后R列出现一个对号,若出现红X则表示投影失败,在视图中可以看到出现坐标点,同时机器人焊接操作下面出现三条焊道,每条焊道两个点位;6、焊点姿态调整:将RB1焊接操作添加到路径编辑器窗口,添加机器人当前位置作为Home点,然后选择焊道起始点,点击鼠标右键选择焊炬对齐命令,调整焊道姿态;7、添加过度点:参照PS篇章节添加机器人焊接路径过度点,完成后设置焊接速度为10mm/s,然后选择所有的点位设置其外部轴数值;8、重复上述步骤,完成其他焊道投影,机器人焊接操作创建、仿真示教,完成后将OP10工位设置为当前操作,在序列编辑器窗口中按工艺顺序链接各操作,最后点击播放按钮查看完整仿真动作,如下图所示;9、如下图所示,双击两操作之间的连接线打开连杆属性对话框,可以设置一个延迟时间,即等待时间;以上即为机器人弧焊仿真示教,有些步骤未详细叙述,可参见PS篇章节内容。