HIGH-RESOLUTION DEM GENERATION USING SELF-CONSISTENCY
陆地观测卫星ALOS介绍
先进的陆地观测卫星ALOS(PALSAR)介绍姚思奇201428013726035摘要2006 年, 亚太地区两颗对地观测卫星的相继升空引起了业内人士的关注。
其中一颗便是 1 月24 日发射升空的日本先进陆地观测卫星ALOS( Advance Land Observing Satellite) , 另一颗是7 月28 日发射的韩国多用途卫星KOMPSAT-2(Korean Multipurpose Satellite)。
本文着重介绍了ALOS 卫星的技术参数, 性能指标以及产品体系, 旨在为进一步研究和开发这类影像产品提供一点参考PALSAR是ALOS卫星携带的一个L波段的合成孔径雷达传感器,不受云层、天气和昼夜影响,可全天候对地观测,获取高分辨率、扫描式合成孔径雷达、极化三种观测模式的数据。
拥有穿透力更强的L 波段,且全球存档丰富,拥有多期数据,可以用来监测更广范围的细微的地表形变,更好的应用在灾害领域和地质监测领域中。
关键词:ALOS;测绘卫星;技术参数;产品体系;PALSARAbstractIn 2006, the Asia Pacific region two earth observation satellites have been launched has aroused the concern of the industry. One is Japan's Advanced Land Observing Satellite ALOS launched on January 24th (Advance Land Observing Satellite), the other is a South Korea multipurpose satellite launch in July 28th, the KOMPSAT-2 (Korean Multipurpose Satellite). This paper introduces the technical parameters of ALOS satellite, the performance index and product system, for the purpose of further research and development of this kind of imaging products to provide a reference pointPALSAR is a synthetic aperture radar sensor of a L band ALOS satellite to carry, not affected by cloud cover, weather and circadian effects, all-weather observation of earth, to obtain high resolution, scanning synthetic aperture radar, polarization three observation mode data. L band has stronger penetrating power, and global archive is rich, has the multi period data, can be used to monitor a wider range of subtle surface deformation, a better application in the field of geological disasters and monitoring in the field.Keywords:ALOS;Cartographic satellite;Technical parameters;The product system;PALSAR目录摘要 (1)Abstract (2)一.引言 (4)二.ALOS卫星的遥感测绘与其他同类卫星的比较 (6)三.ALOS影像的产品系列 (7)3.1 PALSAR利用案例 (8)3.1.1森林、湿地、植被 (8)3.1.2 地质、地形 (9)3.1.3 水文、水资源、冰山 (11)3.1.4 灾害监控、灾害管理 (11)3.1.5 土地利用、土地覆盖、农业 (15)3.1.6 海洋学领域的应用 (15)四.小结 (17)五.参考文献 (18)一.引言自从1999 年9 月, 空间成像公司将世界上第一颗商用1m 级分辨率卫星IKONO;;S- 2 成功送入预定轨道之后, 许多国家都加大了开发高分辨率卫星的力度。
地理信息科学专业英语书后单词

Spatial interpolation 空间插值 standard query language(SQL)标准化查询语言
Polygon 多边形 proximity analysis 邻近域分析
Data structures 数据结构 information retrieval 信息检索
Topological modeling 拓扑建模 network analysis网络分析
Overlay 叠置 data output 数据输出
7、remote sensing 遥感 பைடு நூலகம் sensor 传感器
Electromagnetic radiation 电磁辐射 radiometer 辐射计
Electro-optical scanner 光学扫描仪 radar system 雷达系统
high resolution visible(HRV)sensors 高分辨可视成像传感器
Charge-coupled devices (CCDs)电荷耦合器件
panchromatic(PLA)全色 multispectral(MLA)多波段
WFI(Wide Field Imager)广角成像仪 earth observing system(EOS)地球观测系统
CBERS(China-Brazil Erath Resources Satellite)中巴地球资源卫星
IRMSS(Infrared Multispectral Scanner) 红外多光谱扫描仪
Disaster management 灾害管理 public health 公共卫生
航天飞机雷达地形任务(处理中文版)
SRTM Data Processing Methodology 介绍第一个版本的航天飞机雷达地形任务(SRTM)数据是由从美国地质勘探局ftp服务器(ftp:///srtm/) 2003年所提供的1-degree 数字高程模型(DEM)拼接而成。
这些数据一个一个的大陆组成,并且数据由美国航太总署和美国地质勘探局所处理。
对于美国地区,可用数据的分辨率为1-arc(在赤道处大约30米),但对于世界上的其他地区的1-arc产品被降为3-arc (在赤道处大约90m)。
高程数据SRTM现在已发布了覆盖整个地面的产品,并且“成品”已经发布。
(ftp:///srtm/version2/SRTM3/).在这个网站,由国际农业研究咨询集团和空间信息(联盟)的 CGIAR-CSI为全球提供了post-processed 3-arc 的DEM数据。
原始SRTM数据经过多步的处理,提供了全球的无缝和完整的海拔表面。
在初始版本中, SRTM数据包含空数据的区域,特别是在有河流和湖泊水体的(地区),和那些由在原来的雷达图像中未能提供详细的纹理信息的数据产生的三维elevational数据区。
在796,217平方公里的土地中总共有3,436,585个空白点,在极端的情况下,如尼泊尔,在13,740平方公里的面积中有32,688个空白点,占地面积达到它们国家的9.6%。
无数据地区分布于因得不到足够的详尽的细节的地区,特别是(例如,喜玛拉雅山和安第斯山脉),或沙漠区域(如撒哈拉)。
这些无数据地区的存在成为了使用SRTM的DEM的一大问题,特别是在需要连续流的表面作水文模型应用时的一大问题。
因此,我们就应用一个hole-filling算法提供连续高程表面制成了CGIAR-CSI SRTM的数据产品。
数据投影: Geographic (Lat/Long) projection水平椭球体:WGS84 horizontal datum垂直椭球体:EGM96 vertical datum方法我们遵循由路透社提出的描述的方法 (2007)。
基于深度学习的高分辨率遥感图像海陆分割方法
基于深度学习的高分辨率遥感图像海陆分割方法作者:崔昊来源:《软件导刊》2020年第03期摘要:将高分辨率遥感图像进行像素级海陆分割是遥感应用领域的一项基础性工作,对海岸线提取和海洋近岸目标检测具有重要意义,但传统阈值方法往往由于高分辨率遥感图像覆盖范围广、地物纹理复杂等特点而难以取得预期效果。
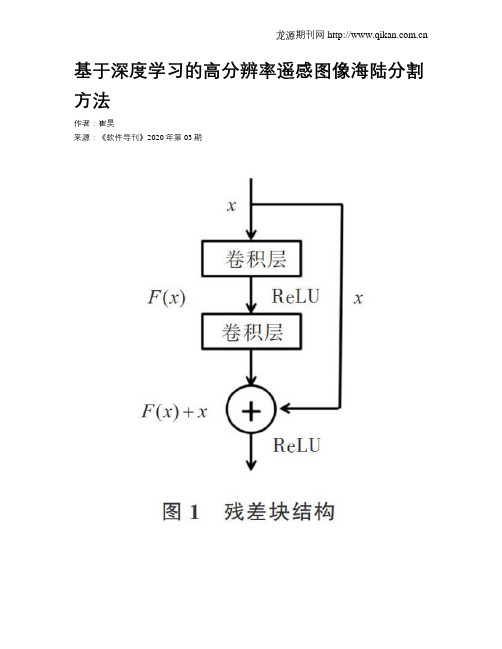
为了提升高分辨率遥感影像海陆分割精度,改善传统阈值方法的不足,基于深度神经网络模型利用编码器—解码器架构,并在编码层中引入残差块,以更好地对特征图进行高级语义信息提取,通过解码层将编码层生成的特征图还原成与输入尺寸相同的特征图,最后通过Sigmoid层对图像进行像素级海陆分割。
在高分辨率遥感图像数据集上的实验结果表明,该网络模型取得良好了分割效果,准确率和Kappa系数分别达到了94.3%和93.7%。
与传统方法相比,海陆分割精确度得到了有效提升。
关键词:深度学习;高分辨率遥感图像;海陆分割;深度神经网络;编码—解码架构DOI:10. 11907/rjdk. 192771中图分类号:TP301 ; 文献标识码:A ;;;;;;;;;;;;;;; 文章编号:1672-7800(2020)003-0095-04Land and Sea Segmentation Method of High-Resolution Remote Sensing Image Based on Deep LearningCUI Hao(School of Computer Science & Engineering,Shandong University of Science & Technology,Qingdao 266590,China)Abstract: Pixel-level sea-land segmentation of high-resolution remote-sensing images is a basic work in remote sensing applications. It is of great significance for coastline extraction and marine near-shore target detection. However, However, the traditional threshold method is often difficult to obtain the expected results due to the wide coverage of high-resolution remote sensing images and the complex texture of the ground features. In order to improve the accuracy of sea land segmentation of high-resolution remote sensing image and improve the shortcomings of traditional threshold methods, based on the depth neural network model, the encoder decoder architecture is used, and residual blocks are introduced into the coding layer to better extract the high-level semantic information of the feature map. Through the decoding layer, the feature map generated by the coding layer is restored to the feature map with the same size as the input. Finally through the Sigmoid layer, the sea land segmentation of images is made at the pixel level. The experimental results on the high-resolution remote sensing image dataset show that the network model achieves good segmentation results, and the accuracy rate and Kappa coefficient reach 94.3% and 93.7%,respectively. Compared with the existing traditional methods, this method improves the accuracy of land and sea segmentation.Key Words: deep learning;high-resolution remote sensing image;sea and land segmentation;deep neural network; encoding-decoding architecture0 引言近年来,随着我国遥感卫星技术的快速发展,高分辨率遥感图像在海洋开发应用与权益保护监督等方面获得广泛应用。
IsoPlane SCT 320 --世界上首款零象差光谱仪
IsoPlane SCT 320--世界上首款零象差光谱仪IsoPlane SCT 320是世界上首款同时具备了超高的成像质量和超高的效率以及完美的灵活性的科研用光谱仪。
先进的光学设计将象差降低到0,与普通光谱仪相比,大幅度的提高了空间分辨和光谱分辨率。
大口径的光学设计以及可以更换的三光栅塔轮,满足了客户从紫外到近红外的或高或低分辨率的光谱探测需求。
通过与PI的CCD, EMCCD, ICCD、InGaAs 阵列探测器以及LightField、 IntelliCal 、 WinSpec等数据采集软件的无缝连接,IsoPlane 短时间内在消除了像面模糊的前提下给我们提供了尽可能多的数据。
特征介绍:特点优点Astigmatism-free design 零象差设计Spectra are free of astigmatic distortion across the focal plane; The number of spectral channels from multifber arrays that can be completely resolved without crosstalk is increased by 4x or more; CCD cameras with heights of up to 1” can be used with good resolutionComa-corrected design 彗差矫正设计Spectral linewidths of 1.5 20 µm pixels lead to spectral resolution as high as 0.04 nm, better than twice as good as other 300 mm instrumentsUltrasharp imaging performance完美的成像质量Reduction or elimination of all major aberrations mean that photons are concentrated in the peaks ofspectral lines, rather than in the wings;Typical peak heights are 2x or better than those in competing instruments;High resolution is maintained when binning over just a single row or over the whole height of the sensorFixed-position camera mount with micrometer focus adjustment带微米聚焦调节功能的固定相机接口Split-clamp camera mount improves ease and stability of mounting while internal mirror focus adjustment, accessible through a convenient port, increases the sensitivity and reproducibility of the focusing procedureKinematic torque-limiting turret mount动力学塔轮Improves reproducibility when changing grating turrets;Up to three turrets with nine gratings are supported; Oversized grating substrates ensure sharp focus over all three gratings on a turretHigh effciency optical coatings高效率光学镀膜Acton #1900 protected Al & MgF2 mirror coatings delivers the highest refectivity from the UV to the NIR. For restricted spectral regions, optional silver, gold and dielectric coatings are available, with refectivities of 98% per surface or better.Wide range of accessories 各种附件Includes fber bundles and adapters, shutters, flter wheels, and light sources including the IntelliCal™ wavelength and intensity calibration sourcesSupported by LightField and WinSpec software 支持各种数据采集软件Cutting-edge 64-bit LightField software with IntelliCal is intuitive, customizable andperfect for multiuser labs具体性能指标:IsoPlaneSCT320 Focal length 焦长 320mmAperture ratio 数值孔径 f/4.6Scan range(with 1200 g/mm gratingat 435 nm) 扫描范围0 - 1400 nmLinear dispersion 线色散倒数 2.38nm/mmCCD resolution(20 mm pixel, 10 mmslit width) CCD分辨率0.08 nmPMT resolution (10 mm slit, 4 mmhigh, 1200 g/mm grating at 435 nm)PMT分辨率0.05 nmWavelength coverage覆盖范围 64nmGrating size 光栅尺寸68 x 68 mmGrating mount 光栅塔轮Interchangeable triple grating turretFocal plane size 焦面尺寸27 mm wide x 14 mm high *Astigmatism 象差Zero ( 0 )Coma 彗差Corrected at 500 nm with 1200 g/mm gratingSlits 狭缝Manual (10 µm to 3 mm) or optional motorized orkinematic entrance slits; Optional manual or motorizedexit slitsWavelength accuracy 波长精度± 0.2 nmRepeatability 复位精度 ±0.05nmDrive step size 步长 0.005nmSize 光谱仪尺寸20.4 in (518 mm) long 17.7 in (450 mm) wide8.5 in (216 mm) highOptical axis height 光心高度 4.875 in (124 mm) with rubber feet4.313 in (110 mm) without rubber feetWeight 重量~ 60 lbs [27 kg]Computer interface 电脑接口 USBandRS232通过可选的导光板兼容高度为1’’的阵列探测器。
高分辨率遥感影像滑坡纹理特征提取方法
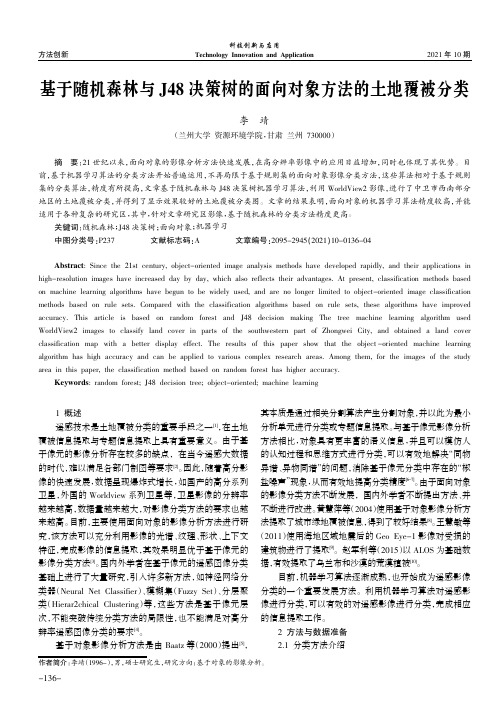
图 1 实 验 区 遥 感 影 像 Fig.1 Remotesensingimageoftheexperimentalarea
!"#$%&'
(%)*+
图 2 滑 坡 体 上 的 波 浪 状 起 伏[11] Fig.2 Wavyupsanddownsonthelandslide
2 滑坡纹理特征分析
感影像上滑坡多尺度多方向的纹理提取。
1 研究区及数据
黑方 台 位 于 甘 肃 省 永 靖 县,地 处 湟 水 河 与 黄 河 交 汇 口 上 游 ,台 塬 分 布 广 泛 ,其 独 特 的 地 形 地 貌 地 质 环 境 及 人 类 耕 地 灌 溉 活 动 ,使 得 区 域 滑 坡 灾 害 频 发 。 实 验 选 用 从 谷 歌 地 球 上 获 取 的 2015 年 9 月 14 日 黑 方台党川段滑坡 数 据,空 间 分 辨 率 为 0.29 m,面 积 为1.05km2,如图 1 所 示。1# 滑 坡 和 2# 滑 坡 均 由 北向南滑动,分布 在 台 塬 边 缘,滑 动 距 离 较 远,滑 坡 区域较亮与周围的 农 田 有 较 大 的 光 谱 差 异;形 态 上 看呈两 头 大 中 间 长 的 哑 铃 状,滑 坡 后 缘 呈 圈 椅 状 ; 滑 坡 体 上 的 溯 流 状 明 显 ,有 明 显 的 波 纹 状 起 伏 ,如 图2所示。
第 52 卷 第 4 期 2021 年 7 月
太原理工大学学报
JOURNAL OFTAIYUAN UNIVERSITY OFTECHNOLOGY
Vol.52 No.4 Jul.2021
Байду номын сангаас 章 编 号 :10079432(2021)04054710
利用DEM_制作数字正射影像(DOM)精度分析

Geomatics Science and Technology 测绘科学技术, 2023, 11(4), 396-402Published Online October 2023 in Hans. https:///journal/gsthttps:///10.12677/gst.2023.114046利用DEM制作数字正射影像(DOM)精度分析万阿芳,潘紫阳湖南省第一测绘院,湖南长沙收稿日期:2023年7月10日;录用日期:2023年10月10日;发布日期:2023年10月16日摘要传统的数字正射影像(DOM)是在数字高程模型(DEM)基础上进行生产的,DOM制作中其数字微分纠正通常要用到DEM实现地形的纠正,DEM的精度会在一定程度上影响DOM精度和效果。
随着无人机摄影测量技术的快速发展和DEM成果逐渐丰富,本文探讨并验证了利用不同精度DEM成果制作DOM成果的不同效果,为DOM制作中合理有效选择数据源提供了帮助。
关键词DEM,DOM,数字微分纠正,精度Accuracy Analysis of Digital Orthophoto(DOM) Made by DEMAfang Wan, Ziyang PanThe First Surveying and Mapping Institute of Hunan Province, Changsha HunanReceived: Jul. 10th, 2023; accepted: Oct. 10th, 2023; published: Oct. 16th, 2023AbstractThe traditional digital orthophoto (DOM) is produced on the basis of the digital elevation model (DEM). In the production of DOM, digital differential correction usually requires the use of DEM to achieve terrain correction, and the accuracy of DEM will to some extent affect the accuracy of DOM.With the rapid development of UAV photogrammetric technology and the gradual enrichment of DEM achievements, this paper discusses and verifies the impact of using different precision DEM achievements on DOM achievements, providing assistance for selecting data sources reasonably and effectively in DOM production.万阿芳,潘紫阳KeywordsDEM, DOM, Digital Differential Correction, PrecisionCopyright © 2023 by author(s) and Hans Publishers Inc.This work is licensed under the Creative Commons Attribution International License (CC BY 4.0)./licenses/by/4.0/1. 引言数字正射影像(DOM, Digital Orthophoto Map)是将地表航天影像经垂直投影而生成的影像数据集。
城市轨道交通三维城市景观快速建模方法研究

城市轨道交通三维城市景观快速建模方法研究吕希奎;王明生;李鸣;贾晓秋【摘要】城市景观是轨道交通三维地理环境的重要组成部分.基于Google Earth 软件批量获取城市空间坐标数据和数字正射影像图,实现城市三维地形重建.利用CityPlan建模软件快速建立多种样式建筑物模型,通过数据库实现对建筑物模型空间信息的有效管理.采用skyline软件的二次开发技术,将城市三维地形和各种建筑物三维模型统一集成,实现了用于城市轨道交通线路设计的三维城市景观的快速建立.【期刊名称】《城市轨道交通研究》【年(卷),期】2013(016)009【总页数】4页(P43-46)【关键词】城市轨道交通;三维城市景观;快速建模;可视化设计【作者】吕希奎;王明生;李鸣;贾晓秋【作者单位】石家庄铁道大学交通运输学院,050043,石家庄;“交通安全与控制”河北省重点实验室,050043,石家庄;石家庄铁道大学交通运输学院,050043,石家庄;石家庄铁道大学交通运输学院,050043,石家庄;石家庄铁道大学交通运输学院,050043,石家庄【正文语种】中文【中图分类】TU984.18线路设计是城市轨道交通整个工程设计的“龙头”,若设计不合理,将造成大量的拆迁、改移和环境影响,产生巨大的浪费。
而当前设计手段是在二维环境下的平、纵、横交互设计,需要内外业反复验证,其效率低、遗留问题多。
随着三维地理信息系统技术、三维造型技术及虚拟现实技术的发展,实现三维GIS(地理信息系统)环境下的可视化轨道交通线路设计,有利于从可视角度直观观察、评价设计效果,及时进行冲突分析、拆迁估计及环境影响分析。
而要实现三维可视化设计,就必须先建立三维地理环境,包括地下三维空间环境和地面三维城市景观环境两部分。
本文将主要研究基于Google Earth软件的城市轨道交通三维城市景观环境的快速建模方法。
1 城市空间数据的批量获取空间地形数据和影像数据是建立三维城市景观的基础数据,也是实现三维可视化轨道交通线路设计的基础数据之一。
不同分辨率DEM对提取坡度精度的影响研究

Research on the Influence of DEM Resolution on the Pre-cision of Extracted SlopesHao WANG , Shuzheng WANGSpatial Information Research Center of Fujian, Key Lab of Spatial Data Mining & Information Sharing, Ministry of Education ,FuzhouUniversity, FuZhou, ChinaAbstract: Based on the DEMs of different resolution extracted from 1:1 million terrain maps, 6 typical land-scape area was chosen as the test plots to study the effects of different resolution on the accuracy of the slope extracted from the selected DEMs. To quantitatively explore the relationship between DEM resolution and the error of the slope, 19 different evaluation indicator of the error was selected for the domain of information theory and statistics, and then those indicators were used to find a corresponding empirical formula and the most appropriate table of resolution. From the table, the most appropriate resolution can be easily identified by the error already known. Our study demonstrates that when the information of slope accuracy was given, the criteria to select the most appropriate resolution can be obtained. This result can be used to provide a basis for selecting the appropriate horizontal resolution in practice.Keywords:Digital Elevation Model, Resolution, Slope不同分辨率DEM对提取坡度精度的影响研究王昊, 王书征福州大学福建省空间信息工程研究中心空间数据挖掘与信息共享教育部重点实验室, 福州, 中国, 350002【摘要】研究选择黄土高原6个典型地貌类型区为试验样区,以1:1万地形图建立的不同分辨率DEM 为研究对象,研究分辨率对DEM所提取坡度精度的影响。
遥感数据网站
遥感知识网站和全球数据资源遥感知识网站:表1 卫星图像与数据网址各种卫星数据/ CEOS遥感数据存档/hypertex/home.htm 英国丹迪大学TBUS/SST :8080/EBb/ml/ NOAAGMS .hk 香港Meteosat http://www.crs4.it/~luigi/METEO/meteo.html 意大利CSPERS-1/SAR http://tracy.esrin.esa.it:8001/www/ 欧空局Radarsat http://www.on.doe.ca/ice/picmonth/radarsat.html 加拿大空间JERS/ERS等http://www.restec.or.jp/restec-e.html 日本遥感技术中心浮式资料 太平洋海洋环境实验室Geosat /SAT/gdrs/geosat.html NODCAVISO-T/P es.fr 法国空间局高度计资料/SAT/SAT.html NOAA散射计资料/oceanwindsl.html NOAA表2 遥感应用及相关内容网址合成孔径雷达图像模拟与应用/SSUG.html加拿大海洋服务中心http://www.on.doc.ca/ica/home.ice.html卫星海洋监测http://www.nrsc.no:801/bilder/JRC/project.html国家环境预报中心/seaice全球变暖模拟http://mri-jma.go.up/Proj/goin/GOIN.html全球变化文献/pub/info/html/bibliogrphy/遥感技术监测评估自然灾害http:// www.elsevier.nl:80/inca.Publications/store/灾害监测http://www.belspo.be/telsat/sumtab/ap_disol.html减灾的遥感需求/ndrd/res2.html灾害管理中航天遥感应用示例/ndrd/ex2.html自然减灾中遥感用途http://www.vtt.fi/aut/ava/rs/docs/annual92/亚洲灾害管理V2,N4,94.12 gopher://emailhost.ait.ac.th:70/00/AsiaInfo/jnl/AsiaDM 风暴遥感监测/mrs/storm94/storm94.html网上台风、洪水与全球数据/IESDIS/NCDC_Apr96.html热带气旋(GMS-5等风场)/tropic/tropic.html台风跟踪与制图实习指南/~paradisc/hurr3.html最佳的客观分析系统/otis-info.html自动云动风向量系统性能ftp:///www/cgms/wincgms.html由GEOS-8/9推出的风场产品:8080/windinfo.html海洋物理过程/海表风场(RRS-2,NSCAT)/oceanwindsl.html散射计风场数据/wind/nscat-data/index.html海岸带资源遥感/crs/pages/coastal-resources.html海岸带管理及连结.au/~kays/subjects.html海岸带管理/risegrant/links-crc.html海洋水色/scripts/SEAWIFS.htmlNOAA卫星应用http://www.itc.nl/-bakker/noaa.htmlCEOS定标/calceos/calceos.html最新的AVHRR定标公式/ora//calib全球海平面/SAT/SAT.html卫星高度计海洋环流应用研究/revgeophyaics/fu01/fu01.html海军GFO数据校正/表3 常见问题网址航天常见问题/hypertext/faq/usenet/space/top.html NASA常见问题http://www.nasa.hqpao/top10.html空间飞行/basics/新盛世计划/About/Faq/地球科学资源网络.au/users/pingram/v_earth.htmlNSAS教学资源/Spacelink.FAQ/FAQ-Spacelink气象卫星业务运行ftp:///pub/wxsat/docs/FAQGIS /geo/gis/faq-index.htmlscigeo.eos ftp:///EosDis/sci.geo.eos地球科学资源网络Gopher:///00/intetdirsstacks/earthsci%3athoen 气象常见问题/hypertext/faq/usenet/wether/top.html热带气旋常见问题/tropic.html/FAQ.htmlTopex/Poseidon Gopher:///11/interactive-project/topex/QA区域制图学软件ftp:///pub/bd.projections.FAQ数据格式/traffic.scidataformats/faq.html数字高程数据/home/ded.html卫星图像/remote/satfaq.htmlSAR /user_serv/sar_faq.html植被指数遥感ftp:///pub/terrill/ravegfaq.txt地球物理与GIS /gis/ores/gis/faqs.html海洋学/~tesmith/ores/ocean/faqs.html地质/~tscmith/ores/geology/volcano/faqs.html火山/~tcscmith/ores/geology/volcano/faqs.html地球物理/~tcscmith/ores/geology/geophx/faqs.html表4 各国航天、遥感机构与相关组织美国国家航空航天局(NASA)http://www.gsfc.nasa/gov/NASA_omepage.html 美国国家海洋大气局(NOAA)/NASA航天器系统部/CRS_page/SCHP.html俄罗斯空间研究所(IKI)http://www.iki.rssi.ru/日本宇宙事业开发团http://hdsn.eoc.nasda.go.jp/(NASDA)日本遥感技术中心http://www.restec.or.jp/restec_e.html法国国家空间研究中心es.fr/(CNES)意大利空间局(ASI)http://hp835.mt.asi.it/加拿大空间局(CSA)http://www.space.gc.ca:7100/加拿大遥感中心(CCRS)rs.nrcan.gc.ca/ccrs/homepge.html德国航天研究所(DLR)http://pid.da.op.dlr.de/welcome/html德国遥感数据中心http://www.difd.dlr.de/welcome/html欧盟地球观测中心(CE)http://ceo-www.jrc.it/欧空局http://www.esrin.esa.it/英国空间中心/bnsc/nain001.html英国国家遥感中心/(NRSC)丹麦遥感电磁研究所http://megasat.emi.dtu.dk/瑞典空间合作(SSC)http://www.ssc.se/瑞典空间物理研究所http://aurora.irf.se/挪威空间与遥感中心http://www.nrsc.no:8001/荷兰国家航天实验室http://www.nlr.nl/巴西国家空间局(INPE)http://www.inpe.br/泰国遥感中心http://www.nrct.go.th/htmlpages/TRSC/re-e-1.html澳大利亚遥感中心.au/acres.html新加坡遥感图象处理中心http://www.crisp.nus.sg/(CRISP)韩国航天研究所http://150.197.50.63/kari.html韩国遥感中心http://sat.kaisat.ac.kr/印度国家遥感局:80/nrsa/中国科学院遥感应用研究所/~china/ins/IRSA/irsa.html 中国卫星气象中心/china/china.htm$gt联合国外层空间事务局ftp:///pub/un/un-homepage.html国际空间站/马里兰大学ftp://表5 协会刊物网址美国航空航天协会/group/aiaa国家空间协会/home.htmlIEEE地球与遥感学报/pub-preview/grs-toc.html欧洲遥感实验协会(EARSeL)http://gds.esrin.esa.it/Cearsel_root国际光学工程联合会(SPIE)/以上转自:栀竹的空间---------------------------------------------------------------------------------------------全球数据资源:∙Online Global Satellite Image andAtlas:/resources/sci/Geog579.htm∙可以下载Aster,QuickBird,IKonos,OrbView,LandSat, SRTM,MODIS数据的网站:∙/data/∙/data/ NASA数据站...推荐∙National Geophysical Data Center GSHHS - A Global Self-consistent, Hierarchical, High-resolution Shoreline Database v1.3 (13 Oct 2005)∙National Geophysical Data Center Coastline Extractor∙U.S. Geological Survey GTOPO30 is a global digital elevation model (DEM) with a horizontal grid spacing of 30 arc seconds (approximately 1 kilometer)HYDRO1k Elevation Derivative Database | Australasia∙National Geophysical Data Center GLOBE Project∙Scripps Institution of Oceanography Global Topography | FTP site∙/ *国家MODIS数据共享平台/ * 美国国家海洋和大气局/ *GIS公园-很多GIS知识和信息 *可以下很多的免费数据http://www.vgt.vito.be/ *用法国SPOT卫星生产的植被数据分辨率1Km / *国家基础地理信息系统网站/ *中国卫星遥感数据服务网-可订购多种遥感数据/ *中国自然资源数据库/ *地理信息系统论坛-学习交流好去处/ *提供很多有用的GIS扩展模块和工具/ *中国气象科学数据共享服务网以下部分转贴自数据的天空综合资料、降水、SST、地面覆盖资料、风场/OLR/指数资料综合资料库:/cgi-bin/forum/topic.cgi?forum=2&topic=484&start=0Noaa资料库:NCEP资料介绍:/cgi-bin/forum/topic.cgi?forum=13&topic=3/ncep_data/欧洲气象中心资料(grib和NC格式的):http://www.ecmwf.int/http://data.ecmwf.int/data/d/era40_daily/Levitus资料:/SOURCES/.LEVITUS94/.MONTHLY/Ucar资料/cas/guide/Atmos/Surface/data.htmlNASA资料:ftp:///seasurfaceheight/以前某天全国的天气情况/feature/hi301100.shtml1度×1度资料/datasets/ds083.2/ARGO资料/web/NCEP 系统资料:NCEP real-analyses and forecasts /data/NCEP/NCAR REANALYSIS /pub/reanalysis/NCEP Eta /mmb/research/meso.products.html NCEP AVN /modelinfo/ftp:///pub/data/nccf/com/gfs/prod/grib格式的ncep资料下载/cgi-bin/forum/topic.cgi?forum=13&topic=561netCDF formatNNRP1: 6 hourly, 2.5 degrees, from 1948 to presentftp:///pub/Datasets/ncep.reanalysis/NNRP2: 6 hourly, 2.5 degrees, from 1979 to 2002ftp:///pub/Datasets/ncep.reanalysis2/降水资料CMAP资料:/data_sets/cmap_precip/NCEP资料: /cgi-bin/forum/topic.cgi?forum=2&topic=484地面资料: /cgi-bin/forum/topic.cgi?forum=2&topic=445细分辨率的全球径流指标场:/cgi-bin/forum/topic.cgi?forum=2&topic=365全球土壤资料:/CAMPAIGN_DOCS/FTP_SITE/INT_DIS/readmes全国160个站的降水资料/cgi-bin/forum/topic.cgi?forum=13&topic=426&start=0/Website/index.php?ChannelID=43&WCHID=5风场资料:/cdc/data.ncep.reanalysis.derived.html#surface_gaussNCEP-QSCAT混合风场资料/海洋再分析资料:/SOURCES/.UMD/.Carton/.goa/.beta7/海表高度:ftp:///seasurfaceheight/ftp:///pub/sea_surface_height/topex_poseidon/mgdrb/data/MGB_423/MGB423.129. Z海面风场:/海浪要素/cgi-bin/forum/topic.cgi?forum=2&topic=3736中国常规气象观测资料:国气象局气象中心资料室就能拿到,只要一张资料50元的光盘刻录费而已。
AZ MIF开发者的中文名字:高对比度、超高纯度TMAH基础开发者,适用于各种先进IC和厚层照相应用

APPLICATIONAZ MIF developers are high contrast, ultra-high purity tetramethyl-ammonium hydroxide (TMAH) based photoresist developers formulated for a wide range of advanced IC and thick photoresist applications. •Surfactant enhanced and surfactant free options •Industry leading normality control •Wide range of normality available•High purity, low particulate formulations•Multiple bulk and non-bulk packaging optionsPROCESSINGGENERAL PROCESSING GUIDELINESAZ MIF developers should be used at room temperature in puddle, spray, or batch immersion processing mode. Variations in develop time, developer temperature, and substrate temperature will result in inconsistent develop uniformity and will affect process repeatability/reproducibility. It is important to monitor and control these variables.When processed in batch immersion mode, MIF developer bath life will be limited by the volume of dissolved photoresist in solution and by carbonate uptake from the fab environment. Bath change out frequency should be specified by thenumber of substrates processed and by elapsed time since the last bath change. The maximum number of substrates that may be processed through a given bath will depend upon the photoresist thickness, the % of substrate surface covered, and the volume of the developer tank.MerckPeRFoRmaNce MaTeRIaLstechnical datasheet AZ® Organic DevelopersMetal Ion Free (TMAH) Photoresist DevelopersWhen not in use, developer tanks should be covered to minimize evaporation and the rate of carbonate uptake. Inert gas blankets (dry N2 for example) may also be used to isolate developer tanks from the fab environment. In general, immersion tanks should be changed at least every 24 hours (or sooner if the maximum number of substrates processed is reached).BATH AGITATIONMild agitation of immersion developer tanks may improve wafer-to-wafer develop uniformity and photo speed when batch processing substrates.PUDDLE DEVELOPINGDue to their lower surface tension, surfactant enhanced developers improve substrate wetting and facilitate puddle formation using lower dispense volumes than typical surfactant free developers. Complete development of patterns in thick photoresist films (> 3.0µm) may require multiple developer puddles. Increased normality developers and/or aggressive surfactants can improve dissolution rates and reduce develop time for thick photoresist films (see application guide section of this publication).RINSINGUse de-ionized water only to rinse wafers post develop and to “quench” the developer activity. Spray pressure or bath agitation during rinsing may reduce post develop defect density by minimizing redeposited surface particles.DEVELOPER APPLICATIONS GUIDE0.26N (2.38%) TMAH DEVELOPERS0.26N TMAH developers are the industry standard for advanced integrated circuit (IC) production and general lithography.AZ 300MIF DeveloperAZ 300MIF is an ultra-high purity, general purpose, surfactant free 0.26N TMAH developer featuring class leading normality control and ppb level metals content. Recommended for puddle, spray, and immersion applications.AZ 726MIF DeveloperAZ 726MIF is a surfactant enhanced 0.26N TMAH developer optimized for puddle develop processes.AZ 917MIF DeveloperAZ 917 MIF is a surfactant enhanced 0.26N developer formulated to improve photo speed in puddle or immersion develop processes with no loss of contrast or selectivity. Improves photo speed by 10-20% vs. AZ 726MIF.AZ 2026 MIF DeveloperAZ 2026 MIF developer contains different surfactants which also have an impact on dissolution rate of photoresist. Dark erosion is higher than with AZ 726 MIF, however this helps to avoid scrumming, which mainly is observed when the photoresist is processed on steppers without applying a post-exposure-bake (PEB).CUSTOM NORMALITY TMAH DEVELOPERSCustom normality developers may be desirable in cases where the develop rate or selectivity provided by 0.26N materials is inadequate. Reduced normality developers can improve selectivity to unexposed resist and increased normality developers will reduce the required exposure dose and/or develop time for thick resist processing.AZ 422 MIF DeveloperAZ 422 MIF developer is a reduced normality (0.215N) surfactant free developer engineered to maximize dissolution selectivity and process control.AZ 435MIF DeveloperAZ 435 MIF developer is a surfactant free, increased normality (0.35N) TMAH developer optimized to improve photo speed for medium thick photoresist processing (5-10µm thick) while maintaining good process control. Recommended for use with AZ 9200 and AZ P4000 series photoresists.AZ® Organic DevelopersAZ 405 MIF DeveloperAZ 405 MIF developer is an aggressive, surfactant enhanced, high normality developer (0.405N) designed for thick photoresist processing (>15µm thick). This developer provides a metal ion free alternative to the sodium or potassium based developers typically employed in thick resist processing. Recommended for use with AZ 9260, AZ 50XT, and AZ P4620 photoresists.AZ 2033 MIF developerAZ 2033 MIF developer contains high TMAH (3.0% TMAH), which is specially designed for improved compatibility with the AZ 8100 Series Photoresist.Developer Normality SurfactantAZ 300 MIF developer0.26N NoAZ 726 MIF developer0.26N YesAZ 927 MIF developer0.26N YesAZ 2026 MIF developer0.26N YesAZ 2033 MIF developer0.33N YesAZ 422 MIF developer0.215N NoAZ 435 MIF developer0.35N NoAZ 405 MIF developer 0.405N YesAZ 732c MIF developer0.30N YesProducts are warranted to meet the specifications set forth on their label/packaging and/or certificate of analysis at the time of shipment or for the expressly stated duration. EMD MAKES NO REPRESENTATION OR WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING MERCHANTABILITY OR FITNESS FOR A PARTICULAR USE REGARDING OUR PRODUCTS OR ANY INFORMATION PROVIDED IN CONNECTION THEREWITH. Customer is responsible for and must independently determine suitability of EMD´s products for customer’s products, intended use and processes, including the non -infringement of any third parties´intellectual property rights. EMD shall not in any event be liable for incidental, consequential, indirect, exemplary or special damages of any kind resulting from any use or failure of the products: All sales are subject to EMD’s complete Terms and Conditions o f Sale. Prices are subject to change without notice. EMD reserves the right to discontinue products without prior notice.EMD, EMD Performance Materials, AZ, the AZ logo, and the vibrant M are trademarks of Merck KGaA, Darmstadt, Germany.North America:EMD Performance Materials 70 Meister AvenueSomerville, NJ USA 08876(908) 429-3500Germany:Merck Performance Materials (Germany) GmbH Wiesbaden, Germany +49 611 962 4031Korea:Merck Performance Materials (Korea) Ltd.Seoul, Korea+82 2 2056 1316Singapore:Merck Performance Materials Pte. Ltd.Jurong East, Singapore +65 68900629Taiwan:Merck Performance Materials Co. Ltd.Hsinchu, Taiwan+886 3 5970885#375Japan:Merck Performance Materials G. K.Tokyo, Japan+81 3 5453 5062China:Merck Electronic Materials Shanghai, China+86 (21) 2083 2362AZ® Organic DevelopersMATERIALS COMPATIBILITY and HANDLINGTMAH containing developers are compatible with all standard semiconductor processing equipment designed to handle high pH aqueous solutions.Note: Contaminating inorganic developer baths or lines withtetramethylammonium hydroxide (TMAH) based metal-ion-free developers, even at the parts-per-million level, will neutralize the dissolution activity of the inorganic developer process. Use extreme caution when changing developing equipment from a metal-ion-free to an inorganic process.TMAH containing developers should be avoided in cases where slight etching of an aluminum layer cannot be tolerated. 0.26N TMAH developers will etch typical deposited aluminum substrate layers at ~100Å/min.Recommended personal protective gear during handling includes eye protection, apron, caustic resistant gloves. Refer to the current version of the SDS for information on exposure hazards. STORAGEStore AZ MIF Developers in a cool, dry location in sealed original containersaway from sunlight and incompatibles. Do not expose to excessive temperatures or moisture. Recommended storage temperature is >0C. Do not freeze. Empty containers may contain harmful residue. DISPOSALAZ MIF Developers are compatible with typical facility acid/base drain lines and materials. For disposal other than via facility solvent drains, refer to the current product SDS and to local regulations.。
面雨量论文:面雨量降尺度地形因子GIS

【关键词】面雨量降尺度地形因子 GIS【英文关键词】Areal precipitation downscaling geographic factors GIS面雨量论文:地形因子及GIS技术在面雨量降尺度研究中的应用【中文摘要】降水是陆上水资源的直接来源和水循环的首要环节,面雨量作为整个区域内单位面积上的平均降水量,能较客观地反映整个区域的降水情况。
但是由于降水空间分布的复杂性,传统的基于有限的气象站点观测数据的面雨量估算方法往往只能获得大尺度的降水状况,GCM输出数据得到的格网降水数据同样面临空间分辨率较低的问题,只能用于宏观趋势分析,无法应用到降水的精细化,定量化分析中去。
近年来基于GCM的面雨量降尺度研究得到越来越多的关注。
但以往的研究往往没有考虑地形因子和海拔高度对降水的影响,没有解释发生在次格网中的地形降水,因而物理意义不明确。
本文详细回顾了各种统计学降尺度方法,使用NCEP/NCAR提供的2011年4-9月的6小时一次的再分析资料,以及江苏省气象台提供的全省20多个常规站降水实况观测资料,结合高分辨率DEM数据,设计了一套考虑地形因子动力作用的面雨量降尺度方案。
研究结果表明:(1)按照大尺度气象要素数据格网进行研究区域划分,在每个子区域中合理的选取代表站首先建立降尺度模型,子区域内其它次格网通过其与代表站的地形因子差异代入模型计算,获得更高分辨率的面雨量数据,进而完成面雨量降尺度的研究方案是可行的。
(2)通过对降尺度结果的检验表明,地形因子的动力效应对降水的空间分布与强度模拟有较大影响,如位于西南部高于全省平均海拔的丘陵地带的58238等站,考虑地形因子的降尺度模型能够很好的表征海拔高度、坡度和坡向对降水的增幅作用;而东部沿海平原地区的58150、58154等站,由于地势缓和,下垫面较为均一,降尺度模型输出结果与实测数据的拟合精度较高。
(3)综观整个实验过程,通过合理选择大尺度预报因子,并对其重新组合和变换以获得与降水量相关程度更高的预报因子,地形因子动力作用参数化,采用回归分析和空间插值相结合的降尺度技术,对获得更为精细的面雨量时空分布具有较高的实际应用价值和参考价值。
利用实景三维模型构建城市洪涝预警平台
第43卷增刊2020年6月测绘与空间地理信息GEOMATICS&SPATIALINFORMATIONTECHNOLOGYVol.43ꎬSupp.Jun.ꎬ2020收稿日期:2019-10-28基金项目:黑龙江省2017年度省院科技合作专项资金支持项目(YS17C18)资助作者简介:田梦然(1991-)ꎬ女ꎬ黑龙江哈尔滨人ꎬ工程师ꎬ硕士ꎬ2016年毕业于武汉大学测绘工程专业ꎬ主要从事3S技术研究工作ꎮ利用实景三维模型构建城市洪涝预警平台田梦然ꎬ储㊀鼎ꎬ赵晓伟(黑龙江省测绘科学研究所ꎬ黑龙江哈尔滨150081)摘要:由强降水或连续性降水导致的城市洪涝会造成人民生命财产的巨大损失ꎬ利用实景三维模型进行淹没分析ꎬ可以有效地反演洪涝灾害危险区域ꎬ为城市防洪提供科学依据ꎮ本文选择牡丹江宁安市为试点ꎬ利用倾斜摄影测量技术构建了实景三维模型ꎬ并以此为基础生成高分辨率DSMꎻ同时ꎬ收集了宁安市高分辨率DEMꎬ进行50年一遇和100年一遇的设计洪水过程ꎻ在此基础上ꎬ对市内牡丹江两侧堤岸的抗洪能力进行分析ꎬ并利用ArcGIS水文分析模块计算洪水过程中城市淹没区域ꎻ最后ꎬ基于Cesium开发三维洪涝预警平台ꎬ将反演结果进行展示ꎮ关键词:实景三维模型ꎻDSMꎻ设计洪水ꎻ淹没分析ꎻCesium中图分类号:P228㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-5867(2020)S0-0021-04UsingRealScene3DModeltoConstructUrbanFloodandWaterloggingEarlyWarningPlatformTIANMengranꎬCHUDingꎬZHAOXiaowei(HeilongjiangProvincialResearchInstituteofSurveyingandMappingꎬHarbin150081ꎬChina)Abstract:Theurbanfloodcausedbyheavyrainfallorcontinuousrainfallwillcausehugelossofpeopleᶄslivesandproperty.Usingthereal3Dmodelforinundationanalysiscaneffectivelyretrievetheflooddisasterriskareaandprovidescientificbasisforurbanfloodcontrol.InthispaperꎬNinganCityofMudanjiangisselectedasthepilotcityꎬandathree-dimensionalmodelofrealsceneiscon ̄structedbyusingtiltphotogrammetrytechnologyꎬandahigh-resolutionDSMisgeneratedbasedonit.Atthesametimeꎬthehigh-res ̄olutionDEMofNinganCityiscollectedforthedesignfloodprocessof50-yearreturnperiodand100-yearreturnperiod.Onthisba ̄sisꎬthefloodresistancecapacityofbothbanksofMudanjiangRiverinthecityisanalyzedꎬandusetheArcGIShydrologicalanalysismoduletocalculatetheurbaninundationareaduringthefloodprocess.FinallyꎬbasedonCesiumᶄsdevelopmentofathree-dimension ̄alfloodwarningplatformꎬtheinversionresultswillbedisplayed.Keywords:real-world3DmodelꎻDSMꎻdesignfloodꎻinundationanalysisꎻCesium0㊀引㊀言宁安市是黑龙江省牡丹江市下辖市ꎬ位于黑龙江省东南部ꎮ宁安内江河均属牡丹江水系ꎬ牡丹江从西往东穿过宁安城区ꎮ每年由强降水或连续性降水导致的道路边坡崩塌ꎬ土地㊁房屋渍水㊁受淹都会造成工㊁农业生产和人民生命㊁财产的损失ꎮ牡丹江上游建有石头水文站ꎬ其水文资料显示ꎬ宁安降水和径流年内分配不均ꎬ4 6月降水只占全年的28%ꎬ径流量也只占全年的20.5%ꎻ7 9月降水却占全年的57.1%ꎬ径流占全年的55.3%ꎮ春季气温正常ꎬ降水略多ꎻ夏季气温㊁降水正常ꎬ但时空分布不均ꎬ多局地短时暴雨ꎬ易发生局地洪涝㊁城市内涝以及因强降水导致的各种地质灾害ꎮ宁安市洪涝灾害隐患点较多ꎬ汛期的出现给防洪㊁抗洪带来巨大挑战ꎬ每年宁安市洪涝灾害防治部门都会投入大量人力ꎬ对所有可能出现洪涝的区域进行排查ꎮ本文通过综合利用宁安市实景三维模型以及宁安市提供的高分辨率DEM㊁城区DSM以及石头水文站提供的多年水文观测数据ꎬ科学模拟反演50年一遇和100年一遇洪水的淹没过程ꎬ并利用Cesium开发实景三维城市洪涝预警平台客观㊁清晰地展现河道防洪能力ꎬ为城市防洪抗洪能力提供了科学的依据ꎬ更有针对性地防治洪涝重点区域ꎬ为宁安市的洪涝灾害防治工作节约大量的人力资源ꎮ1㊀总体建设方案本项目建设方案主要分为3个部分(如图1所示):一是预处理部分ꎬ包括从实景三维提取DSMꎬ从高精度DEM提取湿周㊁流域ꎬ从历史水文数据提取降水㊁流量㊁水位等信息ꎻ二是洪涝灾害监测分析ꎬ主要是模拟了50年一遇㊁100年一遇洪水的分时段形成过程ꎬ进行降雨净流分析㊁河堤淹没分析ꎻ三是三维洪涝预警平台建设ꎬ基于Ce ̄sium开源三维引擎ꎬ整合实景三维模型㊁影像㊁地形㊁水文数据等将反演成果进行展示ꎮ[1]图1㊀总体建设方案Fig.1㊀Overallconstructionplan2㊀数据预处理2.1㊀设计洪水推求根据水文资料ꎬ进行水文序列的频率分析ꎬ从而得到50年一遇与100年一遇的设计洪水过程ꎮ本项目水文资料经过审查㊁插补延长和一致性改正后ꎬ得到代表性较好的60年样本系列ꎬ由大到小排队确定经验点据的频率ꎬ采用矩法对均值㊁离势系数Cv和偏态系数Cs的初值进行估计ꎬ最后假定水文变量服从某一总体分布ꎮ经频率分析计算后得到样本系列的统计参数ꎬ进而确定水文变量的总体分布ꎮ应用适线法得到理论频率曲线ꎬ找到一个最不利的洪水过程ꎬ并用同频率放大方法ꎬ即可求得相应频率的设计洪水过程线ꎮ计算结果如下:最大3日洪量配线结果:X-=1.58ˑ108m3/sꎬCv=1.07ꎬCs=2.62ꎮ最大7日洪量配线结果:X-=3.18ˑ108m3/sꎬCv=1.02ꎬCs=2.61ꎮ最大15日洪量配线结果:X-=5.33ˑ108m3/sꎬCv=0.93ꎬCs=2.19ꎮ根据推求出的最大洪峰流量㊁最大3日洪量㊁最大7日洪量㊁最大15日洪量频率曲线ꎬ按照不同的防洪标准计算相应的设计洪峰㊁设计最大3日洪量㊁设计最大7日洪量㊁设计最大15日流量值ꎬ见表1ꎮ表1㊀石头站不同标准下设计洪峰洪量值表Tab.1㊀DesignpeakfloodvolumeunderdifferentstandardsofShitoustation洪水频率洪峰流量(m3/s)最大3日洪量(亿m3)最大7日洪量(亿m3)最大15日洪量(亿m3)百年一遇(1%)3217.28.215.8123.69五十年一遇(2%)2681.26.813.1520.05㊀㊀采用同频率放大法设计洪水过程线[2-3]ꎬ由于已知资料为每日平均径流量ꎬ因此ꎬ将15日中最大日平均径流量当做洪峰流量ꎬ一日洪量则为该日平均径流量对应的洪量ꎮ按照峰现时间早陡涨缓落的规则ꎬ选取最不利的一场洪水为典型洪水ꎬ即1960年8月23日到9月6日ꎬ按照同频率放大的倍比ꎬ将洪水过程线放大ꎬ如图2所示ꎮ2.2㊀河堤淹没分析为了有效监控河堤淹没情况ꎬ本文在石头站及其下游选择了9个断面进行分析ꎮ首先进行流域提取ꎬ由指定断面与石头站控制的产流面积比进行折算ꎬ将石头站的流量序列过程折算到上游9个指定断面ꎬ并对每个断面进行水文频率分析[4]ꎬ得到100年一遇ꎬ50年一遇的洪水过程ꎮ结合遥感的高分影像测量出的河道地形数据ꎬ计算得到洪水的流量过程转化为水位过程ꎮ根据10个断面的图2㊀石头站1%与2%频率的设计洪水过程Fig.2㊀Designfloodprocessat1%and2%㊀㊀㊀㊀frequencyofShitoustation水位流量关系ꎬ采用线性差值法ꎬ即可得到10个断面100年一遇和50年一遇设计洪水的水位过程ꎬ结果数据见表2㊁表3ꎮ22㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2020年表2㊀百年一遇洪水的水位过程(m)Tab.2㊀Waterlevelprocessof100-yearflood(m)㊀㊀㊀㊀断面编号日期㊀㊀㊀㊀㊀123456789101960/8/23266.79258.80255.58255.34254.47250.18249.50248.72247.99248.451960/8/24266.88258.95255.69255.58254.71250.37249.65248.86248.11248.741960/8/25268.33261.62257.61260.38258.13253.65252.26251.02250.26254.391960/8/26268.86262.68258.34262.50259.22254.90253.22251.81251.09256.761960/8/27269.40263.84259.13264.89260.32256.23254.23252.64251.99259.401960/8/28269.40263.83259.12264.87260.31256.22254.22252.64251.99259.381960/8/29269.25263.51258.91264.22260.02255.86253.95252.41251.74258.651960/8/30268.80262.56258.26262.24259.10254.75253.11251.72251.00256.481960/8/31268.56262.08257.92261.28258.61254.19252.68251.36250.62255.391960/9/1268.29261.54257.55260.21258.03253.55252.18250.95250.19254.201960/9/2268.24261.44257.48260.02257.92253.44252.09250.88250.12253.981960/9/3268.06261.09257.23259.35257.53253.01251.76250.60249.84253.211960/9/4267.74260.46256.79258.17256.78252.25251.16250.11249.33251.861960/9/5267.56260.13256.55257.58256.37251.85250.84249.84249.07251.161960/9/6267.33259.71256.25256.84255.81251.33250.43249.50248.74250.28表3㊀五十年一遇洪水的水位过程(m)Tab.3㊀Waterlevelprocessof50-yearflood(m)㊀㊀㊀㊀断面编号日期㊀㊀㊀㊀㊀123456789101960/8/23266.70258.66255.48255.13254.26250.01249.35248.61247.89248.181960/8/24266.79258.80255.59255.35254.48250.19249.50248.73248.00248.451960/8/25268.13261.22257.33259.61257.68253.18251.89250.71249.94253.511960/8/26268.52262.00257.87261.12258.53254.10252.61251.30250.56255.221960/8/27268.99262.96258.53263.07259.50255.22253.47252.02251.31257.401960/8/28269.00262.98258.55263.12259.52255.25253.49252.03251.33257.441960/8/29268.86262.69258.34262.51259.23254.90253.22251.81251.10256.771960/8/30268.47261.89257.80260.91258.42253.97252.51251.22250.47254.991960/8/31268.26261.48257.51260.10257.97253.48252.13250.91250.15254.071960/9/1268.02261.01257.18259.20257.44252.92251.69250.55249.78253.051960/9/2268.04261.06257.21259.29257.49252.98251.73250.58249.81253.151960/9/3267.88260.74256.99258.69257.12252.59251.43250.33249.56252.461960/9/4267.59260.17256.58257.65256.42251.90250.88249.88249.11251.251960/9/5267.42259.87256.37257.13256.04251.54250.59249.64248.87250.631960/9/6267.21259.49256.09256.47255.51251.06250.21249.32248.56249.84㊀㊀最后ꎬ在已知100年一遇和50年一遇洪水过程水位的情况下ꎬ结合河堤沿岸的DSM数据ꎬ即可科学地判断河堤是否淹没㊁是否能够抵挡100年一遇㊁50年一遇的洪水ꎮ3㊀预警平台开发3.1㊀系统开发总体框架系统具备精细化大场景渲染㊁真实美观的可视化效果㊁海量空间数据高效管理等特性ꎬ为洪涝灾害预警监测提供地形影像处理工具㊁高精度地形生成工具㊁模型数据处理工具㊁矢量数据处理工具㊁应急预案制作等一系列工具来辅助模型数据处理ꎻ同时提供共享数据服务访问服务和专业的淹没区域计算服务[5]ꎬ如图3所示ꎮ图3㊀系统总体开发框架Fig.3㊀Systemoveralldevelopmentframework32增刊田梦然等:利用实景三维模型构建城市洪涝预警平台㊀㊀数据层:为系统提供基本的数据服务ꎬ数据来源于不同系统的数据服务器ꎬ包含了基本地形图数据㊁实景三维数据㊁DOM㊁传感器监测数据㊁应急预案等ꎮ矢量数据㊁栅格数据采用二维GIS空间数据引擎进行存储ꎬ如MongoDB或Postgis等ꎬ实景三维数据㊁专题数据等以文件方式存储ꎮ平台层:主要包括三维地理信息服务平台和数据处理工具ꎬ其中三维地理信息服务平台提供基础平台支撑ꎬ平台工具对所获取的不同来源的各种数据预先进行自动化建模㊁编译处理ꎬ然后再发布为系统可显示㊁搜索和分析的数据ꎻ同时ꎬ该工具提供监测数据㊁应急预案的发布与更新机制ꎬ对变化的数据进行更新ꎬ以实现数据库的实时更新ꎬ提高数据的现势性ꎮ服务层:将基础层中获取到的数据进行处理及存储ꎬ该层是整个平台的核心ꎬ是连接底层数据与上层应用之间的桥梁ꎻ同时该层可以为应用层提供服务支撑ꎬ包括共享数据访问和淹没区域计算ꎮ应用层:提供具体跟业务相关的操作ꎬ如查询㊁检索㊁量算㊁分析等ꎬ为防洪㊁抗洪提供专家级的领导决策辅助依据ꎮ3.2㊀功能介绍系统采用LayerUI作为前端功能展示框架ꎬCesium作为三维展示平台框架ꎬCesiumlab转化的实景三维模型以及石头水文站提供的数据作为关键数据ꎬ实现了宁安市实景三维城市洪涝预警平台的搭建ꎬ具体内容包括3个部分:三维监测场景搭建㊁基本功能开发㊁淹没水位模拟及淹没分析ꎮ3.2.1㊀三维监测场景搭建利用实景三维模型及其衍生产品(DSM㊁TDOM)ꎬ通过Cesium三维引擎搭建三维场景ꎬ加载全球影像地图㊁宁安市地形数据以及宁安市实景三维模型ꎬ调整宁安市实景三维模型ꎬ使其与地形贴合ꎬ真实地展现了宁安市实际概况ꎮ3.2.2㊀基本功能开发基于Cesium系统ꎬ开发实景三维模型的基本量测功能ꎬ如面积㊁长度㊁高度等ꎻ同时也配备了可以同步显示带有地图注记的矢量图层的鹰眼功能ꎮ方便使用者对房屋高度㊁占地面积㊁具体位置等信息进行更为详细的查看ꎬ为洪涝灾害提供精确的地理服务ꎮ3.2.3㊀淹没水位模拟水位的计算通过第二节所述基于水文资料分析获得ꎬ在三维场景中进行模拟ꎮ为了快速获取到水位和淹没区域的关系ꎬ利用ArcGIS的ArcHydro模块[6]ꎬ以2 3mm为水位变化步长ꎬ计算汛期各水位对应的淹没区域覆盖及面积㊁体积等参数ꎬ为科学防洪提供技术支撑ꎮ结合DSM数据ꎬ在河堤两岸的重点监控区域设置关键点ꎬ当水文高度达到临界点时自动进行预警ꎮ4㊀结束语本文结合宁安市洪涝灾害的实际需求ꎬ根据宁安市地质灾害防治部门提出的对洪水及早预防及时掌握的基本要求ꎬ以实现洪水实时预警为主要任务ꎬ以宁安市实景三维数据以及水文资料数据为基础ꎬ分析河堤淹没条件ꎬ模拟水位上涨情况ꎬ构建了基于cesium实景三维的城市洪涝预警平台ꎮ平台充分利用了宁安市牡丹江流域的历史水位数据ꎬ深度挖掘实景三维数据和高精度DEM数据在洪涝预警方面的应用ꎬ可以辅助宁安市地质灾害防治工作ꎬ大量节约灾害巡查的人力物力ꎬ更有针对性地对重点区域重点监控ꎬ为抗洪㊁防洪相关部门提供更为科学㊁快速的服务ꎮ参考文献:[1]㊀杨李东.基于Cesium的三维GIS网络服务与BIM集成研究[D].武汉:武汉大学ꎬ2018.[2]㊀李志元ꎬ黄晓家ꎬ何媛媛.设计暴雨雨型推求方法研究[J].市政技术ꎬ2018ꎬ36(1):141-143ꎬ150. [3]㊀张彦洪.同频率直接放大法推求设计洪水过程线[J].人民黄河ꎬ2016ꎬ38(2):48-50ꎬ62.[4]㊀曾举.GIS水文模型及降雨径流数值模拟研究[D].昆明:昆明理工大学ꎬ2012.[5]㊀储鼎ꎬ田梦然ꎬ崔静.基于B/S的宁安市河长制系统设计与实现[J].测绘与空间地理信息ꎬ2019ꎬ42(7):82-84. [6]㊀甘郝新ꎬ吕能辉ꎬ罗惠红ꎬ等.ArcHydro水文地理数据模型及其应用[J].人民珠江ꎬ2011ꎬ32(2):32-36ꎬ62.[编辑:刘莉鑫](上接第20页)化研究与可持续发展规划等提供资料储备ꎬ并对国家实施 一带一路 国家战略ꎬ实现全球基础测绘产品生产进行了必要探索ꎮ参考文献:[1]㊀袁昆筱佳ꎬ陈曦ꎬ郑福海.基于资源三号三线阵影像快速制作DSM生产应用研究[J].测绘与空间地理信息ꎬ2015ꎬ38(6):111-113.[2]㊀张静ꎬ刘小强ꎬ解修平.DSM生产与应用概述[J].测绘标准化ꎬ2013ꎬ29(4):19-22.[3]㊀汪建峰ꎬ王林建ꎬ宋起.卫星影像在基础测绘中的无控定位精度及测图能力分析[J].测绘技术装备ꎬ2014ꎬ16(3):5-8.[4]㊀刘艳彩.低空大比例尺地形图航测生产关键技术[J].科技创新导报ꎬ2017ꎬ14(35):111-113.[5]㊀王志明ꎬ贾永强.利用正射影像更新1ʒ10000地形图的生产实践 以呼和浩特市为例[J].西部资源ꎬ2017(2):34-36.[6]㊀吴博义ꎬ苏国中.低空大比例尺地形图航测生产关键技术[J].测绘科学ꎬ2016ꎬ41(8):138-143.[编辑:张㊀曦]42㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2020年。
基于随机森林与J48决策树的面向对象方法的土地覆被分类
基于随机森林与J48决策树的面向对象方法的土地覆被分类李靖(兰州大学资源环境学院,甘肃兰州730000)1概述遥感技术是土地覆被分类的重要手段之一[1],在土地覆被信息提取与专题信息提取上具有重要意义。
由于基于像元的影像分析存在较多的缺点,在当今遥感大数据的时代,难以满足各部门制图等要求[2]。
因此,随着高分影像的快速发展,数据呈现爆炸式增长,如国产的高分系列卫星,外国的Worldview系列卫星等,卫星影像的分辨率越来越高,数据量越来越大,对影像分类方法的要求也越来越高。
目前,主要使用面向对象的影像分析方法进行研究,该方法可以充分利用影像的光谱、纹理、形状、上下文特征,完成影像的信息提取,其效果明显优于基于像元的影像分类方法[3]。
国内外学者在基于像元的遥感图像分类基础上进行了大量研究,引入许多新方法,如神经网络分类器(Neural Net Classifier)、模糊集(Fuzzy Set)、分层聚类(Hierar2chical Clustering)等,这些方法是基于像元层次,不能突破传统分类方法的局限性,也不能满足对高分辨率遥感图像分类的要求[4]。
基于对象影像分析方法是由Baatz等(2000)提出[5],其本质是通过相关分割算法产生分割对象,并以此为最小分析单元进行分类或专题信息提取。
与基于像元影像分析方法相比,对象具有更丰富的语义信息,并且可以模仿人的认知过程和思维方式进行分类,可以有效地解决“同物异谱、异物同谱”的问题,消除基于像元分类中存在的“椒盐噪声”现象,从而有效地提高分类精度[6-7]。
由于面向对象的影像分类方法不断发展,国内外学者不断提出方法、并不断进行改进。
黄慧萍等(2004)使用基于对象影像分析方法提取了城市绿地覆被信息,得到了较好结果[8]。
王慧敏等(2011)使用海地区域地震后的Geo Eye-1影像对受损的建筑物进行了提取[9]。
赵军利等(2015)以ALOS为基础数据,有效提取了乌兰布和沙漠的荒漠植被[10]。
arcgis河流提取步骤英文版
arcgis河流提取步骤英文版The process of extracting rivers in ArcGIS involves several steps:1. Data Preparation: The first step is to gather the necessary data for the area of interest, including digital elevation models (DEMs), hydrographic data, and any other relevant spatial data.2. DEM Processing: The next step is to process the DEM to derive the flow direction and flow accumulation rasters using tools such as the Fill tool, Flow Direction tool, and Flow Accumulation tool.3. River Network Extraction: Once the flow direction and accumulation rasters are derived, the next step is to use the Stream Link and Stream to Feature tools to extract the river network from the flow accumulation raster.4. Refinement and Validation: After extracting theriver network, it is important to refine the results by applying filters to remove artificial features and validate the extracted rivers using high-resolution imagery or field surveys.5. Analysis and Visualization: Finally, the extracted river network can be used for further spatial analysis and visualization within ArcGIS, such as watershed delineation, river network connectivity analysis, or creating maps for presentation.These steps provide a general overview of the process of extracting rivers in ArcGIS. Depending on the specific data and analysis requirements, additional steps or tools may be necessary.。
梯田对侵蚀地形指标的影响——以黄土丘2副区为例
第30卷第4期2023年8月水土保持研究R e s e a r c ho f S o i l a n d W a t e rC o n s e r v a t i o nV o l .30,N o .4A u g.,2023收稿日期:2022-05-10 修回日期:2022-06-16资助项目:国家重点研发计划 土壤修复决策支持系统研发 (2022Y F E 011530006) 第一作者:乔冰洁(1998 ),女,河南焦作人,硕士研究生,研究方向为区域土壤侵蚀调查与定量评价㊂E -m a i l :q i a o b i n g j i e @s t u m a i l .n w u .e d u .c n 通信作者:杨勤科(1962 ),男,陕西陇县人,博士,教授,主要从事区域土壤侵蚀评价与侵蚀地形分析㊂E -m a i l :q k y a n g@n w u .e d u .c n h t t p :ʊs t b c y j .p a p e r o n c e .o r gD O I :10.13869/j.c n k i .r s w c .2023.04.018.乔冰洁,杨勤科,王春梅,等.梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例[J ].水土保持研究,2023,30(4):184-193.Q I A OB i n g j i e ,Y A N G Q i n k e ,WA N GC h u n m e i ,e t a l .I n f l u e n c e o fT e r r a c e o nE r o s i o n a lT o p o g r a ph i c I n d e x [J ].R e s e a r c ho f S o i l a n dW a t e rC o n -s e r v a t i o n ,2023,30(4):184-193.梯田对侵蚀地形指标的影响以黄土丘陵第2副区为例乔冰洁1,杨勤科1,2,王春梅1,3,庞国伟1,2,黎恩丹1(1.西北大学城市与环境学院,西安710127;2.旱区生态水文与灾害防治国家林业和草原局重点实验室,西安710127;3.西北大学陕西省地表系统与环境承载力重点实验室,西安701027)摘 要:[目的]探究人工地形(梯田)对地形指标的影响,分析修建梯田对土壤侵蚀过程的影响,为土壤侵蚀评价中梯田措施因子的确定提供科学依据㊂[方法]通过无人机航空摄影测量,获取纸坊沟流域高精度D E M 数据,通过模拟原始坡面数据和构建水平梯田数据,并对这些数据提取坡度㊁坡长㊁坡度坡长因子㊁单位汇水面积和地形湿度指数,分析了这些因子的变化情况,认识梯田对侵蚀地形的影响㊂[结果](1)梯田的修建使得坡度减缓㊁坡长截断㊁L S 因子变小,随着梯田面积占比的增加,坡度㊁坡长㊁L S 因子均呈减小趋势;梯田区,坡度㊁坡长㊁L S 因子大致沿等高线呈条带状分布,非梯田区,坡度㊁坡长㊁L S 因子从分水线向下逐渐增加,到沟底又逐渐变缓㊂(2)梯田的修建使得单位汇水面积减小㊁地形湿度指数变大;单位汇水面积的空间格局与坡长比较类似,较高部位单位汇水面积较小㊁低洼部位较大;梯田区地形湿度指数与坡度有相反的空间分布格局,非梯田区地形湿度指数与单位汇水面积类似㊂(3)微观尺度上,坡长㊁L S 因子㊁单位汇水面积以及地形湿度指数均沿田面坡降方向呈增加趋势,在修建梯田或维护梯田时,应尽量保持田面水平或有微小反坡㊂(4)根据梯田对L S 因子的影响,研究区梯田的工程措施因子值可取0.26~0.37㊂[结论]修建梯田对黄土高原丘陵地区水土保持有较大贡献,可为黄土高原丘陵区修建梯田和土壤侵蚀评价提供参考㊂关键词:梯田;高分辨率D E M ;地形因子;单位汇水面积;地形湿度指数中图分类号:S 157 文献标识码:A 文章编号:1005-3409(2023)04-0184-10I n f l u e n c e o fT e r r a c e o nE r o s i o n a l T o p o g r a ph i c I n d e x -T a k i n g t h e S e c o n dS u b -r e g i o no fL o e s sH i l l a s a nE x a m pl e Q I A OB i n g ji e 1,Y A N G Q i n k e 1,2,WA N GC h u n m e i 1,3,P A N G G u o w e i 1,2,L IE n d a n 1(1.C o l l e g e o f U r b a na n dE n v i r o n m e n t ,N o r t h w e s tU n i v e r s i t y ,X i 'a n 710127,C h i n a ;2.K e y L a b o r a t o r y o f E c o -h y d r o l o g ya n dD i s a s t e rP r e v e n t i o n i nA r i dA r e a s ,S t a t eF o r e s t r y a n dG r a s s l a n dA d m i n i s t r a t i o n ,X i 'a n 710127,C h i n a ;3.S h a a n x iK e y L ab o r a t o r y o f E a r t hS u r f ac eS y s t e ma n dE n v i r o n m e n t a lC a r r y i n g C a p a c i t y ,N o r t h w e s tU n i v e r s i t y ,X i 'a n 710127,C h i n a )A b s t r a c t :[O b j e c t i v e ]T h e a i m s o f t h i s s t u d y a r e t o e x p l o r e t h e i m p a c t o f a r t i f i c i a l t e r r a i n (t e r r a c e s )o n t o po -g r a p h i c i n d i c a t o r s ,a n a l y z e t h e i m p a c t o f b u i l d i n gt e r r a c e s o n s o i l e r o s i o n p r o c e s s ,a n d p r o v i d e s c i e n t i f i c b a s i s f o r t h e d e t e r m i n a t i o no f t e r r a c e sm e a s u r e s i ns o i l e r o s i o na s s e s s m e n t .[M e t h o d s ]T h eh i g h -r e s o l u t i o nD E M d a t a o f Z h i f a n g g o uw a t e r s h e dw e r eo b t a i n e d t h r o u g h U A Va e r i a l p h o t o g r a mm e t r y .T h r o u g hs i m u l a t i n g th e o r i g i n a l s l o p e s u r f a c ea n dc o n s t r u c t i n g h o r i z o n t a l t e r r a c e s ,s l o p e ,s l o p e l e n g t h ,s l o p e l e n g t ha n ds t e e pn e s s f a c t o r (L S ),s p e c i f i cc a t c h m e n ta r e a (S C A )a n dt o p o g r a p h i cw e t n e s s i n d e x (TW I )f r o mt h e s ed a t aw e r e e x t r a c t e d ,a n d t h e c h a n g e s o f t h e s e f a c t o r sw e r ea n a l y z e d t ou n d e r s t a n d t h e i m pa c to f t e r r a c e so ne r o s i o n a l t e r r a i n .[R e s u l t s ](1)T h e c o n s t r u c t i o no f t e r r a c e s r e d u c e d t h e s l o p e ,c u t o f f t h e s l o p e l e n gt ha n dd e c r e a s e d t h e L S f a c t o r .W i t h t h e i n c r e a s e o f t e r r a c e a r e a r a t i o ,s l o p e ,s l o p e l e n gt h a n d L S f a c t o r a l l s h o w e d a d e c r e a -Copyright ©博看网. All Rights Reserved.s i n g t r e n d.I n t h e t e r r a c e da r e a,t h e s l o p e,s l o p e l e n g t ha n d L S f a c t o r sw e r e r o u g h l y d i s t r i b u t e da l o n g t h e c o n t o u r l i n e i na s t r i p;i n t h en o n-t e r r a c e da r e a,t h e s l o p e,s l o p e l e n g t ha n d L S f a c t o r s g r a d u a l l y i n c r e a s e d f r o mt h e w a t e rd i v i d i n g l i n ed o w n w a r d,a n dt h e n g r a d u a l l y s l o w e dd o w nt ot h ev a l l e y b o t t o m.(2)T h e c o n s t r u c t i o no f t e r r a c e s r e d u c e d t h eS C Aa n d i n c r e a s e d t h eTW I.T h e s p a t i a l p a t t e r no f S C A w a s s i m i l a r t o t h a t o f s l o p e l e n g t h,t h e v a l u ew a s s m a l l e r i n t h eh i g h e r p a r t,a n dw a s l a r g e r i n t h e l o w e r p a r t.T h e s p a t i a l d i s t r i b u t i o n p a t t e r no fTW I i n t e r r a c e sw a so p p o s i t e t o t h a t o f s l o p e,a n d t h e s p a t i a l d i s t r i b u t i o n p a t t e r no f TW I i nn o n-t e r r a c e sw a s s i m i l a r t o t h a t o f S C A.(3)A t t h em i c r os c a l e,t h e s l o p e l e n g t h,L S f a c t o r,S C A a n dTW Ia l l t e n d e dt oi n c r e a s ei nt h ed i r e c t i o no fs l o p ed e c l i n eo ft h ef i e l ds u r f a c e.W h e nc o n s t r u c t i n g o rm a i n t a i n i n g t h e t e r r a c e s,t h e f i e l d s u r f a c e s h o u l db ek e p t a sh o r i z o na s p o s s i b l eo r a s l i g h t r e v e r s e s l o p e.(4)A c c o r d i n g t o t h e i n f l u e n c e o f t e r r a c e s o n t h e L S f a c t o r,t h e e n g i n e e r i n g m e a s u r e f a c t o r v a l u e o f t e r r a c e si n t h e s t u d y a r e a s h o u l d b e t a k e n a s0.26~0.37.[C o n c l u s i o n]T h e c o n s t r u c t i o n o f t e r r a c e s h a s a g r e a t c o n t r i-b u t i o n t o s o i l a n dw a t e r c o n s e r v a t i o n i n t h eh i l l y a r e a s o f t h eL o e s sP l a t e a u,a n dc a n p r o v i d e a r e f e r e n c e f o r t h e c o n s t r u c t i o no f t e r r a c e s a n d s o i l e r o s i o na s s e s s m e n t i n t h eh i l l y a r e a s o f t h eL o e s sP l a t e a u.K e y w o r d s:t e r r a c e;h i g h-r e s o l u t i o nD E M;t e r r a i n f a c t o r;s p e c i f i c c a t c h m e n t a r e a;t o p o g r a p h i cw e t n e s s i n d e x人类活动对自然环境要素和过程具有长期的㊁多方面的影响和作用,其中最为明显的形式之一是对地形的改变[1]㊂修建梯田㊁淤地坝和治沟造地,是人为活动改造地形㊁造成人工地形的最主要形式[2]㊂梯田改变了原始坡地的坡度㊁截断了坡面径流,进而减轻了坡地的土壤流失[3],是黄河泥沙减少的重要因素之一[4]㊂梯田被认为是最为重要的水土保持措施之一,也是最古老的水土保持措施之一[5],并且在全球范围内有广泛的分布[6]㊂作为一种人工地形,可以借助数字地形分析方法,分析认识梯田对地形和地表过程的影响[7]㊂据调查,梯田的宽度从几米到几十米不等,现有的较高分辨率数字高程模型(D i g i t a lE l e v a t i o n M o d e l,D E M)大多数是基于地形图建立的,其上表达的是光滑㊁连续的地形表面,通常不能完整地表达梯田等人工地形信息[8]㊂为此,土壤侵蚀和数字地形分析研究领域对梯田的表达及其影响展开了一系列研究,以期改进对地表的表达效果㊂前人的研究集中在如何表达梯田地形,罗仪宁[9]通过野外测量得到梯田坎等信息并将其纳入插值运算中,实现了对梯田地形的数字表达;祝士杰等[10]提出了参数构建法和简易构建法两种构建梯田D E M 的方法;李慧[11]实现了快速构建㊁基于真实田坎信息以及G P SR T K技术3种构建梯田D E M的方法㊂在中低分辨率土壤侵蚀评价中,大多是将梯田作为水土保持措施因子[12],较少考虑梯田对地形的影响[13]㊂刘芬[14]基于田坎特征线和R T K实测数据构建梯田D E M,提取土壤侵蚀地形因子及对比原始D E M与梯田D E M下各因子的变化;王翊人[15]㊁冯园[16]等基于真实田坎的梯田D E M构建方法,将原始D E M与梯田D E M分别提取的坡度㊁坡长㊁坡度坡长因子进行对比分析;此外,王翊人等[17]还从梯田作为地形因子的角度出发,计算土壤侵蚀量并分析其结果与将梯田作为工程措施的土壤侵蚀量的差异;张宏鸣等[18]基于无人机数据建立D E M,分析梯田区侵蚀地形因子随分辨率的变化㊂P i j l等[7]通过对比遥感方法和基于实地调查的方法,以解释梯田损毁发生的位置㊂已有对梯田地形分析的研究,较多采用了提取田坎线构建模拟梯田D E M的方法,对田坎位置表达比较准确,但对田面的表达不够真实,是一种比较理想化的梯田地形模型㊂基于这种模拟的梯田D E M提取的地形属性指标较难完整地反映梯田对侵蚀地形属性指标的影响及其在微观上的变化,同时现有研究对地形指标的考虑不够全面,梯田对土壤侵蚀和土壤水分的潜在影响多大㊁局地尺度上如何分异,依然有待研究㊂本文基于低空无人机测量生产的高分辨率D E M,从人为地形角度,全面分析梯田对坡度㊁坡长㊁坡度坡长因子㊁单位汇水面积和地形湿度指数等土壤侵蚀和水文地貌属性指标的影响,以期降低坡面径流和土壤侵蚀模拟计算中因梯田信息不足而产生的不确定性,促进人为地貌的研究㊂1研究方法1.1研究区概况研究区选择在陕西省安塞县纸坊沟流域的一个支沟(36ʎ42'42ᵡ 36ʎ46'28ᵡN,109ʎ13'46ᵡ 109ʎ16' 03ᵡE,图1),位于黄土丘陵第2副区㊂退耕还林前,土壤侵蚀十分严重㊂研究区流域面积2.6k m2,梯田总面积0.44k m2,占研究区面积的16.9%,梯田主要分布在流域下游右岸的塌地和梁峁缓坡㊂为了研究梯田对地形的影响,根据研究区地形特征,将河网阈581第4期乔冰洁等:梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例Copyright©博看网. All Rights Reserved.值设置为5000m2进行水系提取和流域提取,结合数字正射影像图(d i g i t a l o r t h o p h o t om a p,D OM),选择基本无梯田的(梯田占5%,以下简称样区1)㊁沟间地梯田占一半的(梯田占35%,以下简称样区2)和沟间地几乎全为梯田(梯田占76%,以下简称样区3)的典型小流域各1个(图1 2)㊂图1研究区位置1.2基础数据本研究所用数据包括真实数据和模拟数据两部分(表1)㊂1.2.1真实数据本研究的基础数据为无人机获取的梯田区D E M影像㊁D OM影像(图2A F),分辨率为1m㊂无人机航摄和处理由专业机构制作,满足1ʒ500地形图航空摄影测量内业规范[19]要求㊂数据采用高斯-克吕格投影,按3ʎ分带㊂中央子午线为东经108ʎ,坐标纵轴向西平移500k m,不加带号;平面坐标系统采用2000国家大地坐标系;高程基准采用1985国家高程基准,坐标单位为m㊂其中,样区2上的梯田田面约有3ʎ的正向坡,样区3上的梯田田面约有6ʎ的反向坡㊂1.2.2模拟数据为了模拟修建梯田前后各地形指标的变化,需要对真实数据做出相应处理㊂包括:(1)对含梯田信息的真实数据D E M2和D E M3(图2E,F)滤掉梯田信息,模拟其原始自然坡面㊂在模拟原始自然坡面时,参考T a r o l l i等[20]对试验样区的D E M进行移动窗口的低通滤波处理,从15m的窗口大小依次递增,结合剖面图及山体阴影图,选择窗口为21m的滤波结果作为样区2和样区3的模拟原始自然坡面D E M2f和D E M3f(图2G,H),该窗口下能滤掉大部分的梯田信息;(2)对D E M1(图2D),D E M3f(图2H)数据在沟沿线以上区域构建含水平梯田信息的模拟理想梯田D E M1t,D E M3t(图2I,J)㊂依据‘水土保持工程设计规范“[21],利用祝士杰等[10]提出的梯田简易构建法,实现D E M1t和D E M3t 的构建,具体方式为:(1)以E为起始高程,H(即田坎高度)为等高距提取等高线,获得梯田区的田面外沿约束线㊂(2)以(E+h)为起始高程(h为高程偏移值,且h<H),H为等高距提取等高线,获得梯田区的田面内沿约束线㊂(3)对田面内沿约束线进行等高线高程值修正,将所有等高线高程值降低修正值h,当高程修正值Δh=h时,构建的梯田类型为水平梯田㊂(4)以高程为内插属性,对两种约束线构建T I N,并转化为规则格网D E M,生成梯田田块D E M㊂通过调整参数值,使得田面坡度为0ʎ㊂1.3地形指标及其计算1.3.1地形指标地形对地表过程有多种影响,考虑到地形对坡地水文㊁土壤侵蚀的影响,本研究主要采用坡度(θ)㊁坡长(λ)㊁L S因子(s l o p e l e n g t ha n ds t e e p n e s s f a c t o r,L S)㊁单位汇水面积(s p e c i f i cc a t c h m e n ta r e a, S C A)以及地形湿度指数(t o p o g r a p h i cw e t n e s s i n d e x, T W I)等指标㊂各指标简介如下:(1)坡度㊂坡度是坡地相对于水平地面的倾斜程度,数字地形分析中,坡度通过对高程表面的求导来计算㊂本研究对坡度的计算采样精度较高㊁稳定性较好的E v a n s算法[22]㊂坡度计算公式为:(p,q)=(∂z∂x,∂z∂y)(1)θ=180πˑa r c t a n2p2+q2(2)式中:θ为坡度(ʎ);z为高程(m);x和y为东西方向和南北方向的距离(m);p和q为高程在坐标轴x和y方向的变化率(无量纲);π为圆周率;180π为弧度转换为度的转换系数㊂(2)坡长㊂坡长是指地表径流源点到坡度减小直至有沉积出现地方之间,或到可以辨识的沟道之间的水平距离[23],单位为m㊂坡长计算公式可表示为:λx i,y j=ʏx i,y j x0,y0λc d x(3)式中:λx i,y j为点(x i,y j)处的坡长;积分下限(x0,y0)和上限(x i,y j)分别为径流源点和终点;λc为单元坡长㊂(3)L S因子㊂L S因子是地表裸露条件下,地形对土壤侵蚀影响的无量纲指标[23]㊂本文用C S L E模型的算法[12]计算L S因子㊂(4)单位汇水面积㊂单位汇水面积是单位长度等高线上游的汇水面积[23],单位为m2/m㊂681水土保持研究第30卷Copyright©博看网. All Rights Reserved.图2试验研究样区D O M和山体阴影表1D E M数据数据类别数据简要说明真实数据D EM1样区1的航测D EM原始数据D EM2样区2的航测D EM原始数据D EM3样区3的航测D EM原始数据模拟数据D EM f基于D EM22,经滤波恢复的自然坡面数据D EM3f基于D EM3,经滤波恢复的自然坡面数据D EM1t基于D EM1构建的模拟梯田D EM数据D EM3t基于D EM3f构建的模拟梯田D EM数据(5)地形湿度指数㊂地形湿度指数是由B e v e n 等[24]提出的用于反映土壤水分空间分布特征的无量纲参数㊂TW I的计算公式为:TW I=l n(S C At a nβ)(4)式中:TW I为地形湿度指数;S C A为地表i点的单位等高线长度上的汇流面积;β为该点处的坡度㊂1.3.2指标计算本研究利用P y t h o n编程计算坡度,用前期开发的地形因子提取工具软件(L S_T o o l)[25]提取坡长和L S因子,利用S A G A G I S软件[26]提取单位汇水面积㊁地形湿度指数㊂对于坡长㊁L S因子㊁单位汇水面积以及地形湿度指数而言,流向是决定其分布的主要因素,对因子的计算至关重要㊂梯田地形坡度较为平缓,水流特征主要以漫流为主,适合采用多流向算法来模拟其流向特征,因此对坡长㊁L S因子㊁单位汇水面积以及地形湿度指数的计算均选取多流向算法D-I n f i n i t y算法[27]㊂1.4分析方法从微小流域(无梯田㊁一半梯田和几乎全部梯田)㊁景观(梯田区,差不多是正地形)和田块(带状断面)尺度上,从统计特征和空间格局两个方面,分析梯田建设对侵蚀和水文地形指标的影响㊂从基本无梯田到基本全部为梯田,地形指标变化量(ΔT a-w)㊁某单元修建梯田前后地形指标变化量(ΔT a-s)分别用下式计算:ΔT a-w=T a-o w-T a-t wT a-o wˑ100%(5)ΔT a-s=T a-o s-T a-t sT a-o sˑ100%(6)式中:T a为前述计算的指标,如坡度㊁坡长㊁L S㊁S C A㊁TW I中的任意一个;T a-w和T a-s为微小流域尺度和景观尺度;T a-o w和T a-t w分别为微小流域尺度下原始坡面和梯田坡面的地形指标;T a-o s和T a-t s分别为景观尺度下原始坡面和梯田坡面的地形指标㊂在3个样区的梯田区,以20m的宽度,垂直于等高线的方向确定一条带状区域范围,以2m的步长生成若干个采样区域,按采样区域统计各指标均值,生成高程与各指标对应的带状剖面图,分析坡长等指781第4期乔冰洁等:梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例Copyright©博看网. All Rights Reserved.标与高程的局地关系,其带状剖面位置见图2A中黑色方框区域所示㊂2结果与分析2.1梯田对侵蚀地形因子影响2.1.1梯田对坡度的影响研究区典型小流域坡度计算结果(图3)表明,样区1从分水线向下逐渐变陡,然后到沟底又逐渐变缓,其统计分布基本呈单峰近正态分布(图4A)㊂样区2,3,坡度呈田面-田坎组合形式大致沿等高线呈条带状分布,田面坡度较小㊁田坎坡度较大㊂样区坡度的统计分布呈双峰分布,在5ʎ和43ʎ有两个峰,分别表示缓坡和梯田田面组合㊁陡坡和田坎组合这两种地形(图4B C)㊂在流域尺度上,3类流域的坡度均值分别为32.4ʎ,28.9ʎ,17.5ʎ㊂由无梯田到基本全部为梯田,随着梯田面积占比的增加,总体呈减小趋势㊂据公式(5)计算结果,平均坡度减小46.0%㊂图3坡度空间格局(黑色区域为梯田区边界)图4坡度统计分布3个样区的梯田区的统计表明,修建梯田后坡度通常会降低,3个样区的坡度分别由自然坡面下的27.6ʎ,14.7ʎ,14.3ʎ变为修建梯田后的15.8ʎ,12.5ʎ, 14.6ʎ㊂据公式(6)计算,坡度平均减小18.7%㊂从田面 田坎看,3个样区的田面坡度分别为0.6ʎ,3.5ʎ, 6.3ʎ,田坎坡度分别为51.7ʎ,36.6ʎ,28.0ʎ㊂梯田的修建,较大地减缓局部地形,但是田坎坡度明显增加,如果不经常维护则有垮塌的危险[7]㊂至于样区3在梯田修建前后坡度有些许增加,原因有两个方面,首先是该样区坡度整体比较小,其次是该样区的田面坡度偏大并且有横向坡㊂基于模拟数据(D E M3t)计算坡度并统计的结果表明,修建梯田后的坡度为11.9ʎ,小于自然坡面的坡度(14.3ʎ)㊂2.1.2梯田对坡长的影响研究区典型小流域坡长计算结果(图5)表明,样区1坡长从分水岭向下其值逐渐增加㊂样区2和样区3坡长大致沿等高线呈条带状分布㊂在流域尺度上,3个样区的坡长均呈正偏态单峰分布(图6),但低值比例逐渐增加㊂均值分别为35.4,21.9,16.3m,据公式(5)计算结果,由无梯田到基本全部为梯田,平均坡长减小54.0%㊂图5坡长空间格局(经过对数变换)881水土保持研究第30卷Copyright©博看网. All Rights Reserved.图6坡长统计分布梯田区统计表明,修建梯田后坡长明显减小,3个样区的坡长分别由自然坡面下的30.46,23.03,43.61m,变为修建梯田后的1.34,8.65,9.04m㊂据公式(6)计算,平均减小79.09%㊂基于模拟数据(D E M3t)计算坡长为1.61m,远小于自然坡面(43.61m)和坡式梯田的坡长(9.04m)㊂由此可见,在修建梯田或梯田维护时,使田面呈水平或微小的反坡效果较好㊂从田面和田坎组合看,坡长的微观变化是:田面上,水平梯田保持一个比较低的定值(图7A),坡式梯田从田面内沿向田面外沿增加(图7B),反坡梯田从田面外沿向田面内沿增加(图7C);田坎上坡长自田坎上沿向田坎下沿增加㊂图7坡长-高程关系2.1.3梯田对L S因子的影响如图8所示,样区1的L S因子图与坡度和坡长一样显得自然光滑;在梁峁顶部㊁沟谷地等地形平缓处,L S值较小,在沟壑等坡度较陡处,L S值较大㊂而样区2和样区3的L S因子也大致沿等高线呈条带状分布㊂在流域尺度上,3个样区的L S因子统计分布(图9)与坡度类似(图4),均值分别为9.96,7.47,3.67,据公式(5)计算结果,由无梯田到基本全部为梯田,L S因子均值减小63.2%㊂图8L S空间格局(经过l n变换)梯田区统计表明,修建梯田后L S因子明显减小,3个样区的L S因子分别由自然坡面下的8.55,4.42,5.00,变为修建梯田后的1.40,2.24,2.60,据公式(6)计算,平均减小59.6%㊂基于模拟数据(D E M3t)计算L S因子值为1.24,小于自然坡面(5.00)和坡式梯田的L S因子值(2.60)㊂可见,梯田的修建,使L S因子减小,较大的降低了地形对土壤的潜力㊂着眼田面和田坎序列,L S因子的微观变化是:水平田面上,L S因子保持一个比较低的定值(图10A);田面有正向坡时,L S因子从田面内沿向田面外沿增加(图10B);田面有反向坡时,L S因子从田面外沿向田面内沿增加(图10C);田坎上,坡长自田坎上沿向田坎下沿增加㊂981第4期乔冰洁等:梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例Copyright©博看网. All Rights Reserved.图9L S 统计分布图10L S-高程关系2.2梯田对水文地形因子影响2.2.1梯田对单位汇水面积的影响研究区典型小流域单位汇水面积(S C A)计算结果(图11)表明,单位汇水面积的空间格局与坡长(图5)比较类似㊂较高部位单位汇水面积较小㊁低洼部位较大㊂3个样区流域的单位汇水面积统计分布(图12)均呈正偏态单峰分布㊂由无基本梯田到基本全部梯田,单位汇水面积对数值的均值分别为2.83,2.46,2.36m2/m,呈减小趋势㊂图11单位汇水面积空间格局(经过l n变换)图12单位汇水面积统计分布图(经过l n变换)从微观结构看,与坡长不同的是,由于局地凹地的影响,潜在的地表径流路径(单位汇水面积的高值)会切穿田面(图13)㊂就梯田区看,修建梯田后单位汇水面积有所增加,3个样区的单位汇水面积均值分别由自然坡面下的36.17,22.91,83.25m2/m变为修建梯田后的39.06,23.30,107.18m2/m㊂据公式(6)091水土保持研究第30卷Copyright©博看网. All Rights Reserved.计算,平均增加13.1%㊂这表明修建梯田后,有较好蓄水保墒效益㊂着眼田面和田坎序列(图14),单位汇水面积大致沿坡降方向增加,在局地低洼处汇流增加,单位汇水面积出现较大值,有可能发生切沟并导致梯田损毁[28]㊂2.2.2梯田对地形湿度指数的影响研究区典型小流域地形湿度指数(TW I)计算结果(图15)表明,样区1地形湿度指数从分水岭向下其值逐渐增加(图15A)㊂而样区2和样区3地形湿度指数呈不明显的条带状分布,田面处地形湿度指数值较大,田坎处地形湿度指数值较小(图15B C)㊂对于梯田区,其空间分布格局与坡度有相反的空间分布特征,田面坡度较小,地形湿度指数较大,田坎坡度较大,地形湿度指数较小;非梯田区,其空间分布格局与单位汇水面积类似,沟谷地等低洼地形处,单位汇水面积较大,地形湿度指数也较大㊂统计分布也呈正偏态单峰(图16),均值分别为4.00,4.15,4.51,呈递增趋势㊂在流域尺度上,据公式(5)计算结果,从无梯田到基本上全为梯田,地形湿度指数增大12.8%㊂图13样区3局地凹地单位汇水面积图14单位汇水面积-高程关系图15地形湿度指数空间格局图16地形湿度指数统计分布191第4期乔冰洁等:梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例Copyright©博看网. All Rights Reserved.就梯田区看,3个样区的地形湿度指数分别由自然坡面下的4.05,4.27,5.10变为修建梯田后的6.65, 5.53,4.72㊂从田面-田坎看,3个样区的田面地形湿度指数分别为8.78,6.45,5.73,田坎地形湿度指数分别为1.88,3.02,3.07,梯田的修建,较大程度上增加了局部土壤水分㊂理论上修建梯田后地形湿度指数会增加,但样区3修建梯田前后地形湿度指数有所减小,这可能是由于梯田田面坡度较大,导致样区3修建梯田后地形湿度指数值偏小㊂从田坎-田面组合特征看(图17),无论是坡式梯田㊁反坡梯田还是水平梯田,田面的地形湿度指数均大于田坎,基本上沿坡降方向增加㊂图17地形湿度指数(T W I)-高程关系2.3梯田水土保持效益的讨论作为一种最为传统的㊁效益最为明显的水土保持措施,梯田修建的目的是截断径流㊁减缓径流流速㊁拦蓄上坡来沙,从而减轻土壤侵蚀及其向河流的输沙[4]㊂梯田的修建,使得连续并且相对光滑的自然的表面变为阶梯状,由较长的自然坡变为若干个较短的坡段,使得平均坡度逐渐变缓㊁坡长变短㊁L S因子变小㊂本研究在微流域(或集水区)尺度上,从基本无梯田到基本均为梯田,在梯田质量一般情况下,坡度㊁坡长和L S因子减少的幅度分别为46.0%,54.0%,63.2%,假如修成水平梯田,则减少的幅度分别为50.6%,75.60%,74.4%(表2)㊂由此推算,梯田的工程措施因子(E)的值约为0.26~0.37(1减去L S因子的减幅就是E 因子),这与现有基于小区观测的研究结论基本吻合,如Z h a o等[29]在全国范围内对梯田水保效益的分析(0.32~ 0.33),全国水土保持监测技术规程[30]对坡式和隔坡梯田的E因子的规定(0.2418),这可为土壤侵蚀评价中梯田措施因子的确定提供科学依据㊂表2有梯田流域与无梯田流域侵蚀地形指标值及其变化量样区坡度/(ʎ)坡长/m L S样区132.435.409.96样区228.921.907.47样区317.516.303.67样区3t16.08.642.55变化量1/%46.054.0063.20变化量2/%50.675.6074.40注:变化量1为真实梯田下坡度㊁坡长和L S减少的量(即样区1到样区3的变化量);变化量2为基于理想数据(D E M3t)(即假设修建成水平梯田的情形)下坡度㊁坡长和L S减少的量(即样区1到样区3t的变化量)㊂地形是影响土壤剥蚀㊁搬运和沉积的重要因素㊂田面的横向和纵向坡度,都对水沙运移有较大的影响㊂就纵向坡度看,无纵向坡度的水平梯田对水沙物质阻滞效果较好㊂坡地使水沙物质向下坡方向汇集,如果坡度偏大有可能会使田面径流冲毁田坎㊂反坡梯田使水沙物质由外向内汇集,梯田内侧水分的集中,同样对田坎的稳定性构成威胁㊂就横向坡度来看,局部低洼处形成水分汇集,进而成为侵蚀沟产沙的源头,对田面安全也会构成威胁㊂因此,梯田修建时,避免坡式梯田,修成水平梯田或较小坡度的反坡梯田,以便发挥更好的水保效益㊂3结论与展望(1)梯田的修建使坡度减缓㊁坡长截断㊁L S因子变小㊂在流域尺度上,随着流域内梯田面积占比的增加,坡度减小46.0%㊁坡长减小54.0%㊁L S因子减小63.2%㊂梯田区,坡度㊁坡长㊁L S因子呈田面-田坎组合形式大致沿等高线呈条带状分布,非梯田区,坡度㊁坡长㊁L S因子从分水线向下逐渐增加,到沟底又逐渐变缓㊂微观尺度上,坡长和L S因子均沿田面坡降方向,整体呈增加趋势,田坎处的值大于田面上的值㊂如修建成水平梯田,坡度㊁坡长和L S因子减少分别为50.6%,75.6%,74.4%㊂根据L S减少,梯田的工程措施因子值为0.26~0.37㊂(2)梯田的修建使得单位汇水面积减小㊁地形湿度指数变大㊂单位汇水面积的空间格局与坡长比较类似,较高部位单位汇水面积较小㊁低洼部位较大;对于地形湿度指数,其梯田区与坡度有相反的空间分布特征,非梯田区与单位汇水面积类似㊂在流域尺度上,随着流域内梯田面积占比的增加,单位汇水面积对数值呈减小趋势,地形湿度指数增大12.8%㊂微观291水土保持研究第30卷Copyright©博看网. All Rights Reserved.尺度上,整体沿田面坡降方向呈增加趋势,田面上的横向坡导致田面局部低洼处单位汇水面积出现较大值,有发生切沟的潜在危险㊂在修建梯田或维护梯田时,应尽量保持田面水平或有微小反坡㊂(3)基于滤波的模拟数据和模拟梯田数据可能会与真实数据计算的结果有所不同,但我们认为不会改变梯田对地形指标影响的性质㊂后续研究中,将选取近期修建梯田和前期无梯田的同一小流域数据进行对比分析,并尝试在黄土丘陵区选择更多的小流域样本进行分析,以便得到更具普适意义的科学认识㊂致谢:南京师范大学汤国安教授提供了本研究所用的D OM和D E M数据,特此致谢㊂参考文献:[1] T a r o l l i P.H i g h-r e s o l u t i o n t o p o g r a p h y f o r u n d e r s t a n d i n gE a r t hs u r f a c e p r o c e s s e s:O p p o r t u n i t i e sa n dC h a l l e n g e s[J].G e o m o r p h o l o g y,2014,216:295-312.[2] P a n g G,Y a n g Q,W a n g C,e t a l.Q u a n t i t a t i v ea s s e s s-m e n t o f t h e i n f l u e n c e o f t e r r a c e a n d c h e c k d a mc o n s t r u c-t i o no n w a t e r s h e dt o p o g r a p h y[J].F r o n t i e r so fE a r t hS c i e n c e,2020,14(2):360-375.[3] C h e nD,W e iW,C h e nL.E f f e c t so f t e r r a c i n gp r a c t i c e so nw a t e r e r o s i o nc o n t r o l i nC h i n a:A m e t a-a n a l y s i s[J].E a r t h-S c i e n c eR e v i e w s,2017,173:109-121.[4]刘晓燕,王富贵,杨胜天,等.黄土丘陵沟壑区水平梯田减沙作用研究[J].水利学报,2014,45(7):793-800.[5] D o t t e r w e i c h M.T h eh i s t o r y o f h u m a n-i n d u c e ds o i l e r o s i o n:G e o m o r p h i cl e g a c i e s,e a r l y d e s c r i p t i o n sa n dr e s e a r c h,a n dt h e d e v e l o p m e n t o fs o i lc o n s e r v a t i o n:A g l ob a ls y n o p s i s[J].G e o m o r p h o l o g y,2013,201:1-34. [6] W e iW,C h e nD,W a n g L,e t a l.G l o b a l s y n t h e s i s o f t h e c l a s-s i f i c a t i o n s,d i s t r i b u t i o n s,b e n e f i t s a n d i s s u e s o f t e r r a c i n g[J].E a r t h-S c i e n c eR e v i e w s,2016,159:388-403.[7] P i j lA,Q u a r e l l aE,V o g e lT A,e t a l.R e m o t es e n s i n gv s.f i e l d-b a s e d m o n i t o r i n g o f a g r i c u l t u r a l t e r r a c ed e g r a-d a t i o n[J].I n te r n a t i o n a lS o i la n d W a t e r C o n s e r v a t i o nR e s e a r c h,2021,9(1):1-10.[8]杨勤科,赵牡丹,刘咏梅,等.D E M与区域土壤侵蚀地形因子研究[J].地理信息世界,2009,2(1):25-31,45. [9]罗仪宁.D E M表面地形突变特征表达方法研究[D].西安:西北大学,2011.[10]祝士杰,汤国安,张维,等.梯田D E M快速构建方法研究[J].测绘通报,2011(4):68-70,82.[11]李慧.梯田D E M构建方法研究[D].西安:西北大学,2014.[12] L i uBY,Z h a n g K L,X i eY.A nE m p i r i c a lS o i lL o s sE q u a t i o n[C]ʊP r o c e e d i n g s12t h I n t e r n a t i o n a l S o i l C o n-s e r v a t i o nO r g a n i z a t i o nC o n f e r e n c e,V o l.Ⅱ:P r o c e s so fS o i l E r o s i o n a n d I t sE n v i r o n m e n t E f f e c t.B e i j i n g:T s i n-g h u aU n i v e r s i t y P r e s s,2002.[13]杨昕,汤国安,刘学军,等.数字地形分析的理论㊁方法与应用[J].地理学报,2009,64(9):1058-1070. [14]刘芬.黄土高原梯田D E M地形特征研究[D].西安:西北大学,2015.[15]王翊人,赵牡丹,冯园,等.梯田对土壤侵蚀地形因子扰动特征研究[J].山东农业大学学报:自然科学版,2017,48(1):46-51.[16]冯园,赵牡丹,张鹏,等.顾及梯田的D E M地形特征研究[J].水土保持研究,2017,27(4):32-45. [17]王翊人,赵牡丹,张倩,等.梯田作为地形因子和工程措施对土壤侵蚀定量评价影响的对比研究[J].水土保持通报,2017,37(2):148-152,157.[18]张宏鸣,杨勤科,王猛,等.梯田区侵蚀地形因子随D E M分辨率变化的特征分析[J].农业机械学报,2017,48(10):172-179.[19]国家测绘局测绘标准化研究所.1ʒ5001ʒ10001ʒ2000地形图航空摄影测量内业规范G B/T79302008[S].北京:中国标准出版社,2008. [20] T a r o l l i P,C a l l i g a r oS,C a z o r z i F,e t a l.R e c o g n i t i o no fs u r f a c e f l o w p r o c e s s e s i n f l u e n c e db y r o a d s a n d t r a i l s i nm o u n t a i na r e a su s i n g h i g h-r e s o l u t i o nt o p o g r a p h y[J].E u r o p e a nJ o u r n a lo f R e m o t eS e n s i n g,2013,46(1):176-197.[21]水利部水利水电规划设计总院,黄河勘测规划设计有限公司.水土保持工程设计规范G B51018 2014[S].北京:中国计划出版社,2014.[22] E v a n s I S.A n i n t e g r a t e d s y s t e mo f t e r r a i n a n a l y s i s a n ds l o p e m a p p i n g[J].Z e i t s c h r i f t F u r G e o m o r p h o l o g i e,1980,36:274-295.[23] W i s c h m e i e rW H,S m i t hD D.P r e d i c t i n g r a i n f a l l e r o-s i o n l o s s e s:a g u i d e t o c o n s e r v a t i o n p l a n n i n g(N o.537)[M].W a s h i n g t o n D C:U S D e p a r t m e n to f A g r i c u l-t u r e,S c i e n c e a n dE d u c a t i o nA d m i n i s t r a t i o n,1978.[24] B e v e nKJ,K i r k b y M J.A p h y s i c a l l y b a s e d,v a r i a b l ec o n t r i b u t i n g a r e am ode l of b a s i nh y d r o l og y[J].H y d r o-l o g i c a l S c i e n c e sB u l l e t i n,1979,24(1):43-69. [26] C o n r a dO,B e c h t e l B,B o c k M,e t a l.S y s t e mf o r a u t o-m a t e d g e o s c i e n t i f i ca n a l y s e s(S A G A)v.2.1.4[J].G e o-s c i e n t i f i cM o d e lD e v e l o p m e n t,2015,8(7):1991-2007.[27] T a r b o t o nD G.An e w m e t h o d f o r t h e d e t e r m i n a t i o no ff l o wd i r e c t i o n s a n du p s l o p ea r e a s i ng r i dd i g i t a l e l e v a-t i o nm o d e l s[J].W a t e rR e s o u r c e sR e s e a r c h,1997,33(2):309-319.[28]林祚顶,刘宝元,丛佩娟,等.山东临朐2019年 8㊃10特大暴雨水土保持调查[J].水土保持学报,2021,35(1):149-153.[29] Z h a oJ,Y a n g Z,G o v e r sG.S o i l a n dw a t e rc o n s e r v a-t i o nm e a s u r e s r e d u c e s o i l a n dw a t e r l o s s e s i nC h i n a b u tn o t d o w nt ob a c k g r o u n dl e v e l s:E v i d e n c e f r o m e r o s i o np l o t d a t a[J].G e o d e r m a,2019,337:729-741. [30]中华人民共和国水利部.水土保持监测技术规程S L277 2002[S].北京:中国水利水电出版社,2002.391第4期乔冰洁等:梯田对侵蚀地形指标的影响 以黄土丘陵第2副区为例Copyright©博看网. All Rights Reserved.。
TerrainData
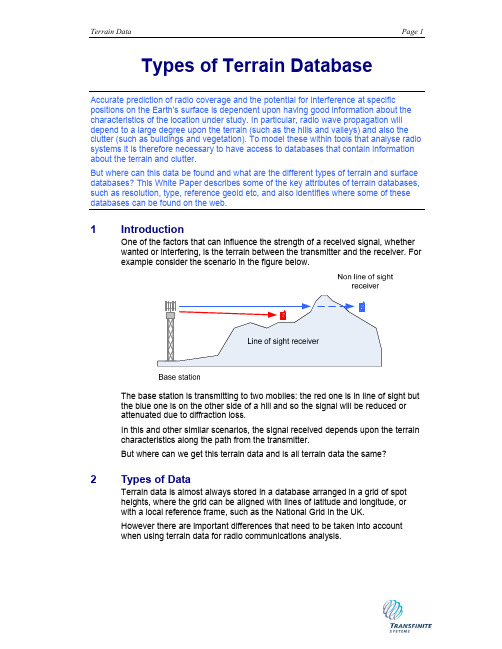
Types of Terrain DatabaseAccurate prediction of radio coverage and the potential for interference at specific positions on the Earth’s surface is dependent upon having good information about the characteristics of the location under study. In particular, radio wave propagation will depend to a large degree upon the terrain (such as the hills and valleys) and also the clutter (such as buildings and vegetation). To model these within tools that analyse radio systems it is therefore necessary to have access to databases that contain information about the terrain and clutter.But where can this data be found and what are the different types of terrain and surface databases? This White Paper describes some of the key attributes of terrain databases, such as resolution, type, reference geoid etc, and also identifies where some of these databases can be found on the web.1 IntroductionOne of the factors that can influence the strength of a received signal, whetherwanted or interfering, is the terrain between the transmitter and the receiver. For example consider the scenario in the figure below.The base station is transmitting to two mobiles: the red one is in line of sight but the blue one is on the other side of a hill and so the signal will be reduced orattenuated due to diffraction loss.In this and other similar scenarios, the signal received depends upon the terrain characteristics along the path from the transmitter.But where can we get this terrain data and is all terrain data the same?Data2 TypesofTerrain data is almost always stored in a database arranged in a grid of spotheights, where the grid can be aligned with lines of latitude and longitude, orwith a local reference frame, such as the National Grid in the UK.However there are important differences that need to be taken into accountwhen using terrain data for radio communications analysis.2.1 ResolutionThe first and most important characteristic is the resolution of the terrain data.This is the spacing between the spot heights and the higher the resolution (i.e.the smaller the distance between samples) the better.For example consider the following two figures made using VisualyseProfessional which show the topography around London using differentresolution terrain databases.To help with comparison with later figures, the circle shows the location ofLondon’s Docklands and the grid lines are spaced every 10 km. In addition alluse the same colour scheme.GTOPO30: a 30 arc second i.e. 900m terrain database:Ordnance Survey terrain data, sampled every 50m:It can be seen that the latter is significantly higher resolution and would givemuch more accurate predictions.However the higher resolution data also requires significantly greater memoryand so for analysis over large areas it can be better to use the lower resolutiondata, or to use high resolution data only for around the transmit and receivesites.Surfacevs.2.2 TerrainAnother difference to be aware of is between terrain and surface data. Terraindata excludes objects like buildings and vegetation that sits upon the terrainwhile surface database includes it, as in the figure below.The figure below uses a surface database taken by radar from a Space Shuttlemission. It contains measurements of where the radar waves are reflected,which could be terrain but also be from structures like buildings sitting on theterrain. This data is freely available and can be downloaded from the USGS web site.SRTM Surface Database, sampled every 3 arc seconds i.e. 90m:Additional features can be seen which include roads, railways, and buildings.The circled feature is the Docklands development to the east of London. It canbe seen that there are structures in white, which are the large office towers,which are not shown in the previous OS database, which excludes surfaceobjects like buildings.Using surface data can improve the accuracy of predictions as the radio waveswill actually propagate over the surface rather than the terrain. However tosignificantly improve accuracy this can require much higher resolution – such asuse of LIDAR whereby surface data with resolutions of under 5m can begenerated.Note that use of a clutter database should be combined with a terrain but not asurface database. This is to avoid the double counting that can come frommodelling the additional loss due to buildings twice.Data2.3 QualityofNoise and resolution can be a problem, in particular for surface databases. Forexample the ASTER dataset, which is currently in beta release, should be“better” than SRTM as it is provided in 30 m resolution rather than 90 m outsidethe US. However noise means the actual quality of the data is probably lower as can be seen in the figure below.The SRTM is to the right and the Thames can be picked out. However on theASTER data to the left while the pixels are small it is much harder to pick outthis significant geographic feature due to the greater noise or variation in heightat each pixel.Indeed the validation report on the ASTER web page1 noted that “ASTERGDEM is not as sharp as the SRTM DTED2 and appears to contain less spatial detail.” It concluded “the spatial detail resolvable by the ASTER GDEM, at leastof the data tested, is slightly better than 120m.”1/gdem.asp2.4 Database Coverage RestrictionsSome database can be restricted in range. For example the UK OrdnanceSurvey 50m database only covers mainland Britain, and so wouldn’t be helpfulelsewhere.The SRTM database has wider coverage, though there are two knownlimitations. Firstly it is only available between 60°S and 60°N in latitude.Secondly due to gaps between Space Shuttle ground tracks and processingerrors, there are a number of holes in the data.For example in the SRTM graphic of London below there is circled one of anumber of black spots to the north of the centre. If you take a path profilethrough these areas it can be seen that within them the height drops to zero: this does not occur in reality!Data hole in SRTM Surface database:Geoids2.5 ReferenceA final point to be aware of is that different terrain databases can use differentEarth geoids and the locations of stations entered should be consistent with thereference frame used for terrain data.For example consider the figure below which compares the SRTM terrain datawith the RadDEM for part of the Australian south coast along the Great OceanRoad2:2 See /wiki/Great_ocean_roadSRTM vs. RadDEM terrain databases:The two databases are using different reference geoids, namely:•SRTM: WGS84 / GPS coordinate system•RadDEM: Australian Geodetic Datum 66 (AGD66)These result in a slight offset of the coastline. Marked on the figure is thelocation of the structure called the Twelve Apostles using the GPS coordinatesfrom Wikipedia which in reality is just offshore: it can be seen to align well withSRTM rather than RadDEM.Note also that different geoids can also have different reference zero heightpoints.More information about WGS84 and reference geoids can be found online inarticles such as this one:/wiki/WGS84Dataof3 SourcesThis section describes some of the most popular terrain databases: contact usfor more information or if you have any suggestions of additional data sources.We have split this section into two sub-sections that give examples firstly ofglobal databases and then some national databases.Databases3.1 Global3.1.1 USGS GTOPO 30The United States Geological Survey (USGS) Global Topographic database is a relatively old database that give world-wide coverage but at low resolution. Its 30arc second grid corresponds to about 900 m, which too low for mostapplications.It does have some advantages in that it can be used to model large areaswithout excessive memory requirements. It can therefore be feasible to combine fine resolution terrain data immediately around specific sites and then user lower resolution data over larger distances. This approach is described in more detailbelow.The USGS web site for downloading GTOPO30 data is:/#/Find_Data/Products_and_Data_Available/gtopo30_info3.1.2 USGS SRTM Level 1USGS SRTM Level 1 is a 3 arc second (about 90m) global land masses terraindatabase covering locations below 60 degrees in latitude. The world is split intotiles of size 1° by 1°. Sea and land masses are not given in the main databasebut a separate 900 MB sea and water body database (SWBD). The referencegeoid is WGS 84 and the data is described further at this web site:/#/Find_Data/Products_and_Data_Available/SRTMBoth the terrain database and SWBD can be downloaded from the USGSseamless web site (see NED data below) or at:/NewEarthExplorer/Note that we at Transfinite have a version of SRTM processed together withSWBD to take account of land / sea boundaries and hence can be loaded faster into our Visualyse Professional study tool.3.1.3 ASTERThe Advanced Spaceborne Thermal Emission and Reflection Radiometer(ASTER) data is available from the NASA Warehouse Inventory Search Tool(WIST) site at:https:///wist-bin/api/ims.cgi?mode=MAINSRCH&JS=1It is a 30m global surface database in GeoTIFF format using WGS84 referenceframe. A validation report gives the estimated accuracies as 20 meters at 95 %confidence for vertical data and 30 meters at 95 % confidence for horizontaldata.As noted above, it has less resolution and greater noise than the SRTM dataset.However it is available for latitudes greater than 60° which is the limit of SRTM.3.2 NationalDatabases3.2.1 National Elevation Dataset (NED)This is a terrain database for the United States and at most locations in a rangeof resolutions including 30m, 10m and in some locations 3m while for Alaska the resolution is 60m. The reference geoid is the North American Datum of 1983(NAD 83).NED data can be downloaded from in a number of formats including GeoTIFFfrom:/3.2.2 USGS SRTM Level 2USGS SRTM Level 3 – 1 arc second (about 30m) for the United States ofAmerica for latitudes below 60° North. It can be downloaded from the samesource as the USGS SRTM Level 1 and uses the WGS84 reference frame.3.2.3 UK Ordnance SurveyThis dataset is available for free download from this web address:https:///opendatadownload/products.htmlThe “Land-form Panorama” dataset is relatively old, dating from 1980 butrelatively good quality (low noise) and 50 m terrain resolution.A range of download options are available such as DTM grid format which usethe UK’s National Grid to define the locations of tile corners.3.2.4 RAD DEMThis database covers Australia and is available for a small charge in CDROMformat from the Australian Communications and Media Authority (ACMA) at: .au/WEB/STANDARD/pc=PC_1613Contact Transfinite for more information about using this dataset withinVisualyse Professional.Databases4 CombiningYou needn’t be restricted to a single terrain database. For example you mightwant very high resolution terrain data in the vicinity of the transmitter / receiver,but it would require excessive memory to continue with the same resolution allalong the path.An example can be seen in the figure below where a high resolution terrainregion is overlaid on top of a larger low resolution terrain region. The path profile can be seen to be highly detailed at the start and be less detailed when itcrosses into the lower resolution area.This feature can be used to model locations in high detail to specify objects such as buildings. A surface (i.e. terrain plus buildings) database can be created andread into simulation tools overlaid upon a terrain database (i.e. excludingbuildings). This high resolution surface data could be generated by using LIDAR measurements or generated from building databases.An example of this is shown below using Visualyse Professional where 50 mterrain data of London is combined with a user generated tile defining buildingsto a resolution of 5 mTransfinite5 ContactIf you have any questions about terrain and surface databases, please contactus at:LtdAddress TransfiniteSystems6C Rathbone SquareRoadTanfield24Croydon CR0 1BTKingdomUnitedPhone+44 (0) 20 8240 6648Fax+44 (0) 20 8240 4440Email info@Web Transfinite Systems Ltd 2011。
海洋测绘-第7章 水深测量及水下地形测量-PPT精选文档
监控器
外部监 测和显 示系统
后处理 GPS 导航监控器
操作和检 测单元
实时数据处理工作站 数据存储
声速断面 Transceiver
数据存储 数据存储 和处理
绘图仪
罗经
声纳影像记录 姿态传感器 换能器 图2.1SimradEM950/1000多波束声纳系统组成单元 打印机
波束的发射、接收流程及其工作模式 多波束换能器基元的物理结构是压电陶瓷,其作 用在于实现声能和电能之间的相互转化。换能器也正 是利用这点实现波束的发射和接收。 多波束发射的不至一个波束,而是形成一个具有一定 扇面开角的多个波束,发射角由发射模式参数决定。
多波束波束的几何构成
波束在海底投射点位置的计算需要船位、潮位、船 姿、声速剖面、波束到达角和往返程时间等参数。计 算过程包括如下四个步骤: 姿态改正。 船体坐标系下波束投射点位置的计算。 波束投射点地理坐标的计算。 波束投射点高程的计算。
为便于波束投射点船体坐标的计算,现作如下假设: 换能器处于一个平均深度,静、动吃水仅对深度有 影响,而对平面坐标没有影响。 波束的往、返程声线重合。 对于高频发射系统,换能器航向变化影响可以忽略。
高分辨率测深侧扫声纳
高分辨率测深侧扫声纳简称为HRBSSS声纳 (High Resolution Bathymetric Sidescan Sonar)。 HRBSSS声纳分辨率高、体积小、重量轻、功耗低以 及声纳阵沿载体的长轴安装,特别适用于AUV、 HUV、ROV、拖体和船上,在离海底比较近的高度 上航行,获得高分辨率的地形地貌图。 声纳阵包括左舷和右舷两个声纳阵,自主开发的 声纳软件包括水上数字信号处理软件、水上服务器软 件、声纳驱动软件和水下主控软件,以及用于调试测 试的终端调试测试软件、终端调试测试软件和声纳仿 真软件。
桑干河阳原—涿鹿段地貌演化
桑干河阳原—涿鹿段地貌演化张文朋;申旭辉;曹忠权;陈立泽【期刊名称】《地震》【年(卷),期】2011(031)004【摘要】桑干河发源于山西宁武县,向NE方向流经大同—阳原盆地和王家湾山地流人怀涿盆地.桑干河阳原涿鹿段河流阶地发育较好,对其阶地的研究有助于更好地理解桑干河的演化及其流经区域的构造活动特征.而桑干河阳原—涿鹿段地貌演化对了解阳原古湖和怀涿古湖的演变有重要意义.本文通过遥感影像解译及对高分辨率DEM数据分析,结合实地测量,综合研究了阳原—涿鹿段桑干河阶地的发育特征.结果表明,该区的构造活动强烈,经历了断块差异性升降运动;受差异运动的影响,该段桑干河经历了被分为东西两支河流,最终又重新贯通的演化过程.%The Sanggan River originates from Ningwu county of Shanxi, flows over Datong-Yangyuan basin and Wangjiawan Mountains, and continues into Huaizhuo basin. The terraces are well developed in the Yangyuan-Zhuolu section of the Sanggan River, and it is helpful to understand the evolution of the Sanggan River and the neotectonic characteristics of the area. And it is significant for learning the evolution of the ancient Yangyuan lake and Zhuolu Lake to study the geomorphic evolution of Yangyuan-zhuolu section of the Sanggan River. Authors of this paper studied the terraces of YangYuanzhuolu section of the Sanggan River comprehensively by field measurement, interpretation of remote sensing images and processing of high-resolution DEM data. The results show that the faults betweenmountain and basin activated intensely, and the area experienced block difference lifting movement. Under the influence of the differences of movement, the Sanggan River has experienced an evolution process that divided it into two rivers and eventually ran through again.【总页数】10页(P108-117)【作者】张文朋;申旭辉;曹忠权;陈立泽【作者单位】中国地震局地震预测研究所,北京100036;中国地震局地震预测研究所,北京100036;西藏自治区地震局,西藏拉萨850000;中国地震局地震预测研究所,北京100036【正文语种】中文【中图分类】P315【相关文献】1.涿鹿县桑干河流域玉米优质高产栽培技术要点分析 [J], 梁旭忠;2.现代土壤磁化率空间分布特征及成壤影响因素分析——以桑干河阳原段为例 [J], 焦天; 董进; 汤文坤; 迟振卿; 王永; 庞健锋; 孙楠3.河北阳原“泥河湾组”地层对比及其地貌演化 [J], 王宪瑜4.地貌面、地文期与地貌演化——从华北地貌演化研究看地貌学的一些基本理论[J], 吴忱5.从晋北地区地貌演化看桑干河的古流向 [J], 吴忱;马永红;张秀清因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HIGH-RESOLUTION DEMGENERATION USING SELF-CONSISTENCYFrank Stolle a, Howard Schultz a, Dong-Min Woo ba Department of Computer Science, University of Massachusetts, Amherst, MA, USA -{stolle, hschultz}@b School of Electrical Engineering, Myongji University, Yongin, Korea -dmwoo@wh.myongji.ac.krCommission I, WG I/5KEY WORDS: DEM Extraction, Matching, Satellite ImageryABSTRACT:We present a practical method for producing a high-resolution digital elevation map (DEM) from a set of spatially overlapping images. We start with the principle that multiple low-resolution DEMs can be combined to form a high-resolution DEM provided that (i) the sample DEMs are registered to the same coordinate system; (ii) the elevation estimates at each posting are partially independent; and (iii) the elevation errors between postings within a DEM are partially independent. Under these conditions, each sample DEM contributes an incremental amount of new information to the composite DEM. As a result, increasing the number of sample DEMs will increase the spatial resolution as well as decrease its vertical error bounds of the composite DEM. The key to an effective implementation of this algorithm is the ability to produce sample DEMs which are free from large blunders.We are able to separate valid elevation estimates from blunders by exploiting their uniquely statistical properties. In general elevation estimates (computed by image matching algorithms) are members of one of two populations: Valid estimates in which the image matching algorithm identified a pair of corresponding pixels (one in the reference image and one in the target image) that are projections of the same surface point; and blunders in which the image matching algorithm identified corresponding pixels that are not projections of the same surface point. Since blunders are not related to the surface, corresponding pixels can occur anywhere in the search range. As a result, valid elevation estimates have an error distribution characterized by an unbiased normal distribution with a small standard deviation, and (ii) blunders have an error distribution characterized by a uniform distribution spread out over a much larger range. The standard deviation of the valid error distribution corresponds to the elevation range seen by a single pixel; whereas, the width of the blunder distribution corresponds to the full search range.1.INTRODUCTIONThis paper is concerned with the process of fusing repeated samples of motion parallax captured by a moving camera to recover the 3D structure of a scene. In particular, we describe a DEM tiling approach that produces an accurate 3D representation by fusing a sequence of DEMs made from repeated samples of the motion parallax. The method generates a sequence of partially overlapping DEM tiles, which are averaged together to reduce noise and form a continuous model of the underlying terrain. For this method to be successful, a normally distributed, unbiased process must characterize the error distribution of the elevation data in individual tiles. Unfortunately, computed DEMs often are contaminated by large errors (blunders) that result from errors during the image matching process. These errors produce spikes in the disparity and elevation maps. Although averaging reduces their magnitude, the spikes are not eliminated from the data. As a result, combining multiple DEMs has the undesirable effect of increasing the frequency of error spikes. Thus, identifying and removing large errors from the individual DEM tiles is key to fusing a collection of DEM tiles.We use the principle of self-consistency developed by Leclerc, Luong and Fua (Leclerc et al.,1998a) to identify unreliable points in a distribution. The main focus of their work was to obtain a quality measure for correspondence algorithms without relying on ground truth. Their algorithm obtained a probability distribution by counting the number of corresponding image points for each object point that is consistent with the viewing geometry within a specified error limit. Consistency checking in stereo algorithms has previously been used (Chang et al.,1991; Faugeras et al.,1993; Fua,1993; Konolige,1997; Matthies et al.,1995). In a closely related application (Fua and Leclerc,1996; Leclerc et al.,1998b), extend their work to detect changes in terrain by applying the concept of self-consistency to elevations. We improve on consistency checking by first detecting unreliable elements in DEMs generated from two images and then excluding unreliable estimates from an information fusion process across more than two stereo pairs.2.METHODOLOGYOur algorithm uses the self-consistency difference to separate valid elevation estimates from blunders. The self-consistency difference is defined as the elevation difference arising from changing roles of the reference and target images. From a pair of spatially overlapping images A and B, two DEMs can be produced Z AB and Z BA with a self-consistency difference (Z AB - Z BA). We show through an analysis using simulated and real data that the self-consistency difference (Z AB - Z BA) in conjunction with the match scores can be used to separate valid elevation estimates from blunders.This model predicts that the blunders will have a disproportionate influence on the tails of the distribution ofelevation errors. Thus, to accurately represent the elevation error distribution, the histogram of (Z AB - Z BA ) is fit to a model that includes a Gaussian distribution plus a constant,()min 220max 2exp h s z h h i +⎦⎤⎢⎣⎡−− (1)where h i are the histogram entries from (Z AB - Z BA ) , z 0 and sare the mean and standard deviation of the distribution,respectively, h min is the asymptotic value of the tails and h maxis the value at the peak of the distribution. The parameters (z 0, s , h min , h max ) are found by fitting the model expressed in Equation 1 to the histogram of (Z AB - Z BA ).Based on this noise model, three methods for detecting blundersare explored:1. Set a blunder threshold to a multiple of s (the width the distribution in Equation 1). The elevation estimates Z AB (x,y) and Z BA (x,y) are considered reliable if ⏐Z AB (x,y) - Z BA (x,y)⏐ < n ⋅s , (where n is a user definedparameter).2. Set a blunder threshold to a user defined absolute value.Since the self-consistency difference can be interpreted asan uncertainty, the operator can reject elevation estimates where the self-consistency difference is above a desired value. For example, the operator may wish to reject any posting where the uncertainty is greater that 1 meter.3. Set a blunder threshold to accept a percentage of thepostings.If there are N overlapping images, each from a unique viewpoint, then there are a total of N (N -1) ordered image pairs. Thus, there are a maximum of N (N -1) samples at every posting in the DEM. Applying one of the blunder detection criteria may reduce the number of elevation estimates. However, as long as there are at least two elevation estimates at a posting, an improved mean and estimated error bounds can be found.3. EXPERIMENTS The method is tested using two data sets, a synthetic data set consisting of a dense array of elevation postings and a set of photorealistic images of a desert scene, and a set of nine Ikonos images of central Boston. The synthetic data set was used to evaluate the spatial error characteristics of the DEM fusion method. For example, to examine the spatial decorrelation characteristics requires ground truth that is denser than the decorrelation length scale of the data. The use of synthetic data is based on the assumption that a previously acquired DEM and ortho-image can serve as pseudo ground truth over an extended area, and that a photo-realistic synthetic image can act as an image source. Starting with a high resolution DEM and ortho-image, the method generates synthetic images from arbitrary viewpoints using a ray-tracing algorithm. The quality of the DEM fusion algorithm can be tested by re-computing a DEM from the synthetic images and comparing it to the pseudo ground truth.3.1 Constructing synthetic pseudo ground truth We have constructed a pseudo ground truth DEM and ortho-images from a set of four overlapping aerial images. We thenused a ray tracing program to create synthetic aerial images. These synthetic images were used as input to reconstruct a DEM. The degree of similarity between the true andreconstructed DEM was analyzed using error variograms. The following is a summary of the procedures used to create the pseudo ground truth. We started with a set of four 9 x 9 inch aerial images (digitized to 7800 x 7800 pixels) of a high desert,taken from an altitude of about 5000 feet. To make the testsmore tractable, we selected four 2000 × 2000 pixel sub-imagesthat were almost completely mutually overlapping. Figure 1 and Figure 2 show two of these sub-images.From these four sub-images (labelled A, B, C, and D) we constructed the pseudo ground truth as follows: First, each image pair (A-B, A-C, A-D, B-C, B-D, C-D) was converted to a pair of epipolar aligned images. Then the disparity maps between the epipolar aligned image pairs were found using theimage matching algorithm developed in (Schultz,1995). For each epipolar pair (for example, A and B), two disparity mapsd AB and d BA were computed. The first subscript denotes the reference image and the second subscript denotes the targetimage. The reference and target images are defined such thatthe pixels (i,j) in the reference image and (i+d (i,j), j) in thetarget image are projections of the same surface facet.Figure 1: Sub-image A of the high desert imagery (2000x2000 pixels).Figure 2: Sub-image B of the high desert imagery (2000x2000 pixels).From an image processing point of view, the disparity maps define a function that warps the target image into the reference image. The function d (i,j) defines a displacement for the pixels in the target image that brings it into alignment with the reference image. From a pair of images, two warping functions (disparity maps) can be defined – d AB which warps B into A, and d BA which warps A into B.In the absence of image matching errors the DEMs (Z AB and Z BA ) derived from the disparity maps (d AB and d BA ) would be similar. Matching algorithms, however, are notorious for finding false matches which produce large errors in the recovered DEMs. Our system was specifically designed to reduce the occurrence of false matches and to detect and remove false matches (or the elevation errors resulting from false matches). After image matching, the next step was ortho-rectification which converted each disparity map into a DEM. In this case, the four test images yielded 12 disparity maps (d AB , d BA , d AC , d CA , etc.) and twelve sample DEMs (Z AB , Z BA , Z AC , Z CA , etc.).The final step in creating a pseudo ground truth data set was to fuse the 12 sample DEMs into the single high quality DEM and ortho-image. This was done by computing six self-consistency errors maps by taking the difference between the DEMs created from a pair of epipolar aligned images, δAB = (Z AB - Z BA ), δAC = (Z AC - Z CA ), etc. The self-consistency errors are compared to a threshold (e.g., 1.0 meter). If the self-consistency difference exceeds this threshold, the elevations estimates are labelled unreliable. Next, the fused DEM was formed by taking a weighted average of the reliable elevation estimates. The weights are the inverse of the self-consistency differences (i.e., 1/δ). This maximum likelihood approach assigns a higher value to elevation estimates where self-consistency difference is small. The fused DEM is shown inFigure 3. Further details of the fusing process are described in(Schultz et al.,2002).Figure 3 The fused pseudo ground truth DEM.Figure 4: The DEM recovered by fusing the individual DEMs generated from the synthetic images.3.2 Recovering the DEM from synthetic imagesWe then created a set of four synthetic images from the pseudo ground truth DEM using a photo-realistic ray tracing program. This allowed us to generate images of the pseudo ground truth from an arbitrary position. As an initial test we decided to place the synthetic cameras in the same position as the positions from which the original images were taken. This allowed us to double-check our viewpoint synthesis procedure by making sure that image features corresponded across the original and the synthesized images. Synthetic images were created at the same resolution as the ground truth DEM (2000 x 2000 pixels) so that we could test the ability to capture fine spatial detail.Figure 5: Distribution of differences of elevation estimates between Figure 3 and Figure 4.Figure 6: A map of the number of reliable elevation estimates contributing to the final result.From the four synthetic images (A,B,C,D) a total of twelve DEMs (Z AB, Z BA, …, Z CD, Z DC) and six self-consistency difference arrays (Z AB,- Z BA, …, Z CD - Z DC) were generated. Using the first method described above for selecting reliably postings, a threshold of 2s was selected, which corresponded to ±0.4m. The resulting DEMs were fused according to the above described procedure and the result is shown in Figure 4. Figure 5 shows the distribution of the differences between this DEM and the pseudo ground truth; Figure 6 shows a map of the number of reliable elevation estimates. About 98% of the fused DEM elements had 10 or more reliable values, 215 out of the 4 million had 3 or less reliable estimates, and only 157 had no reliable elevations estimates. In addition, there were no apparent blunders or spikes in the fused DEM, and the rendered surface appeared realistic.3.3Experiments with Ikonos dataIn the second set of experiments, we constructed a fused DEM of central Boston from nine Ikonos images, collected from three orbital passes. From each of these 10K × 10K Ikonos images, a 2048 × 2048 sub-image that viewed the same area of Boston were extracted. Image 46, one of the 2048 × 2048 sub-images is shown in Figure 7 (each image was labelled by two unique digits taken from its original Space Imaging label).To avoid possible epipolar alignment problems with cross-track image pairs, we generated DEMs only from image pairs taken along the same orbital track. The nine images resulted in eighteen pairs. We applied epipolar alignment to this set of images and created nine 3072 × 3072 epipolar aligned (rectified) image pairs (three image pairs from each of the three orbital passes). A larger output size was chosen to compensate for geometric distortions introduced by epipolar alignment.Figure 7: Ikonos image 46 of central Boston.Figure 8: A 400x400 sub-image of image 46, resampled in epipolar geometry, generated from image pair 46-48.A sample of one epipolar aligned image pair (orbit 2 image pair 46-48) is shown in Figure 8 and Figure 9. Notice the large amount of perspective distortion associated with the tall buildings, the presence of confusing shadow patterns, and the large number of occluded surfaces. Also notice that all stereo parallax is horizontal. The epipolar-aligned pairs were examined manually to test for any vertical stereo disparity. Less than one pixel of vertical stereo disparity was detected. These results verified the quality of the RPC-epipolar alignment algorithm for images taken along a single orbit.Figure 9: A 400x400 sub-image of image 48, resampled in epipolar geometry, generated from image pair 46-48.For each epipolar-aligned image pair, two disparity maps were generated using the image matching procedure, resulting in eighteen disparity maps. Then a DEM was computed for each disparity map using ortho-rectification. We also ortho-rectified the match scores for each disparity estimate. Elevation estimates were labelled reliable if the self-consistency difference fell below a preset threshold and the match scores were above a preset threshold (in this case the thresholds were 3.0 meters and 0.8 respectively). The size of each DEM was 2454 postings in latitude by 3308 postings in longitude. The latitude range was from 42.3444° to 42.3632° North, and the longitude range was from -71.0736° to -71.0482° East, with a grid spacing in latitude and longitude of 7.66e-6°. The distribution of the elevations is shown in Figure 13. The elevation range was (-50m, 184m) relative to the WGS84.The eighteen sample DEMs were fused to form (1) a single high quality DEM, (2) a map of the standard deviation of reliable elevation estimates, (3) map of the number of reliable elevation estimates used to compute each elevation estimate, and (4) a 9-bit code giving the image pairs that produced the elevation estimates (e.g., if bit-0 is set then the image pair 43-44 contributed to the elevation estimate, if bit-1 is set then image pair 43-45 contributed, etc.).A typical sample DEM (from image pair 46-47) and it elevation distribution are shown in Figure 10 and Figure 11. Notice the apparent lack of detail in the DEM. The fused DEM and its elevation distribution are shown in Figure 12 and Figure 13. The fused DEM shows considerably more detail. Also note that small peaks can be seen in the tails of the elevation distribution which may correspond to tall buildings. To illustrate the relationship between the fused DEM and buildings, the fused DEM was projected back into one of the original Ikonos images. Figure 14 shows a 2k × 2k section from one of the original Ikonos images and the corresponding fused elevations. The power of the fusion method can be seen by comparing thesample DEM (Figure 10) with the fused DEM (Figure 12).Figure 10: A DEM generated from a single pair (46-47) of Boston images.Figure 11: The elevation distribution for the sample DEM shown in Figure 10.4. ACKNOWLEDGEMENTS This research has been supported by the Army Research Office under grant number DAAD19-99-1-0016, the National Science Foundation under grants EIA-9726401, EIA-9726401 (KOSEF), EIA-0105272 (SGER), and IIS-0430742, and the Korean Agency for Defense Development (ADD), Seoul, South Korea.Figure 12: The final DEM computed by fusing all DEMs generated from the set of nine Ikonos images. The elevations are encoded in greyscale such that lower elevations are dark and higher elevations are light. Unreliable elevations are encoded in black.Figure 13: The elevation distribution for the fused DEM shown in Figure 12.5.REFERENCESChang, C., Chatterjee, S. and Kube, P.R., 1991. On an Analysis of Static Occlusion in Stereo Vision, Computer Vision and Pattern Recognition, pp. 722-723.Faugeras, O.D., Hotz, B., Matthieu, H., Vieville, T., Zhang, Z., Fua, P., Theron, E., Moll, L., Berry, G., Vuillemin, J., Bertin, P. and Proy, C., 1993. Real Time Correlation-Based Stereo: Algorithm, Implementations and Applications. INRIA Technical Report 2013.Fua, P., 1993. A Parallel Stereo Algorithm that Produces Dense Depth Maps and Preserves Image Features. Machine Vision and Applications, 6: 35-49. Fua, P. and Leclerc, Y., 1996. Taking Advantage of Image-Based and Geometry-Based Constraints to Revover 3-D Surfaces. Computer Vision and Image Understanding, 64(1): 111-127.Konolige, K., 1997. Small Vision Systems: Hardware and Implementation, Eighth International Symposium on Robotics Research.Leclerc, Y., Luong, Q.-T. and al., e., 1998a. Self-consistency: A novel approach to characterizing the accuracy and reliability of point correspondence algorithms, DARPA Image Understanding Workshop. Morgan Kauffman, Monterey, CA.Leclerc, Y., Luong, Q.-T. and Fua, P., 1998b. A Framework for Detecting Changes in Terrain. IEEE Transactions on Pattern Analysis and Machine Intelligence, 20(11): 1143-1160.Matthies, L., Kelly, A., Litwin, T. and Tharp, G., 1995. Obstacle Detection for Unmanned Ground Vehicles: A Progress Report, Intelligent Vehicles '95 Symposium, pp. 66-71.Schultz, H., 1995. Terrain Reconstruction from Widely Separated Images., SPIE, Orlando, Florida, pp. 113-123. Schultz, H., Hanson, A., Riseman, E., Stolle, F., Woo, D.-M. and Zhu, Z., 2002. A Self-consistency Technique for Fusing 3D Information, IEEE Fifth International Conference on Information Fusion, Annapolis Maryland.Figure 14: A composite color image of Boston with the original image (Figure 7) encoded in value, elevations (Figure 12) encoded in hue, and the standard deviation of the elevation errors encoded in saturation.。