打靶系统程序清单
电脑打靶作业指引
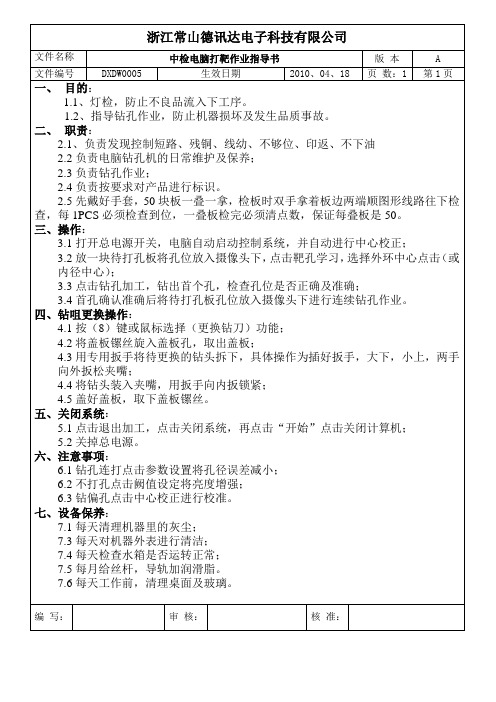
3.4首孔确认准确后将待打孔板孔位放入摄像头下进行连续钻孔作业。
四、钻咀更换操作:
4.1按(8)键或鼠标选择(更换钻刀)功能;
4.2将盖板镙丝旋入盖板孔,取出盖板;
4.3用专用扳手将待更换的钻头拆下,具体操作为插好扳手,大下,小上,两手向外扳松夹嘴;
4.4将钻头装入夹嘴,用扳手向内扳锁紧;
4.5盖好盖板,取下盖板镙丝。
五、关闭系统:
5.1点击退出加工,点击关闭系统,再点击“开始”点击关闭计算机;
5.2关掉总电源。
六、注意事项:
6.1钻孔连打点击参数设置将孔径误差减小;
6.2不打孔点击阙值设定将亮度增强;
6.3钻偏孔点击中心校正进行校准。
七、设备保养:
浙江常山德讯达电子科技有限公司
文件名称
中检电脑打靶作业指导书
版本
A
文件编号
DXDW0005
生效日期
2010、04、18
页数:1
第1页
一、目的:
1.1、灯检,防止不良品流入下工序。
1.2、指导钻孔作业,防止机器损坏及发生品质事故。
二、职责:
2.1、负责发现控制短路、残铜、线幼、不够位、印返、不下油
2.2负责电脑钻孔机的日常维护及保养;
2.3负责钻孔作业;
2.4负责按要求对产品进行标识。
2.5先戴好手套,50块板一叠一拿,检板时双手拿着板边两端顺图形线路往下检查,每1PCS必须检查到位,一叠板检完必须清点数,保证每叠板是50。
三、操作:
3.1打开总电源开关,电脑自动启动控制系统,并自动进行中心校正;
3.2放一块待打孔板将孔位放入摄像头下,点击靶孔学习,选择外环中心点击(或内径中心);
打靶参考资料

1.0MPa蒸汽管线吹扫打靶方案一、 1.0MPa蒸汽管线吹扫打靶简述1.0MPa蒸汽管线吹扫打靶分三步进行:1、从1. 0MPa蒸汽管网界区阀至蒸汽分水器D-406前进行吹扫。
2、从蒸汽分水器D-406处至汽轮机管线进行吹扫打靶。
3、从蒸汽分水器D-406至汽包D-501过热蒸汽出口管线进行吹扫打靶。
二、吹扫打靶的总体要求:1.吹扫要求①吹扫打靶前所有蒸汽管线的施工动改要完成,吹扫打靶后蒸汽管线不得进行动改施工。
②吹扫打靶前应将流量孔板拆除,调节阀走旁路,并将不需吹扫的支线盲死。
③吹扫前先进行暖管排水,检查管道热位移及管托、支吊架情况。
④吹扫时采取每次吹扫一根轮流吹扫的方法。
⑤吹扫需用大流量进行,流速不低于30m/s。
⑥吹扫时应按升温----降温----升温的顺序循环进行,并组织人员对管线焊口、弯头等用木棒进行敲击。
⑦吹扫时要通知周围人员离开防止烫伤,有专人监护。
⑧在大流量吹扫12小时后,该管线可装靶板检查,视靶板情况决定是否继续吹扫。
2、打靶要求①打靶要在规定位置安装靶板,引蒸汽进行打靶,每次打靶要求至少持续15min后检查靶板。
②靶板合格标准项目质量标准靶片痕迹(大小)φ0.6mm痕深<0.5mm粒数1个/Cm2③打靶合格以连续两次合格为准。
④靶板制作可参考下图:L≥管径30mm 靶板支架靶片δ=5mm的铝板三、1.0MPa蒸汽管线吹扫打靶步骤1、从蒸汽管网界区阀至蒸汽分水器D406进行吹扫1.1吹扫前准备:1.1.1全面检查从蒸汽管网界区阀至蒸汽分水器D406流程。
1.1.2拆掉D406,接好放空临时线。
1.1.3要求临时线开口450向上,离地面3米以上。
1.1.4分水罐D406平移到一边,开口处用塑料布包好,防止进入杂物。
1.1.5在管线支吊架、管托处做好初始位置划线工作。
1.2暖管1.2.1打开此段蒸汽管线的疏水阀。
1.2.2缓慢打开蒸汽界区隔断阀,对此段管线进行暖管。
1.2.3检查管线热位移情况及管线支吊架、管托情况。
打靶法的一个c程序
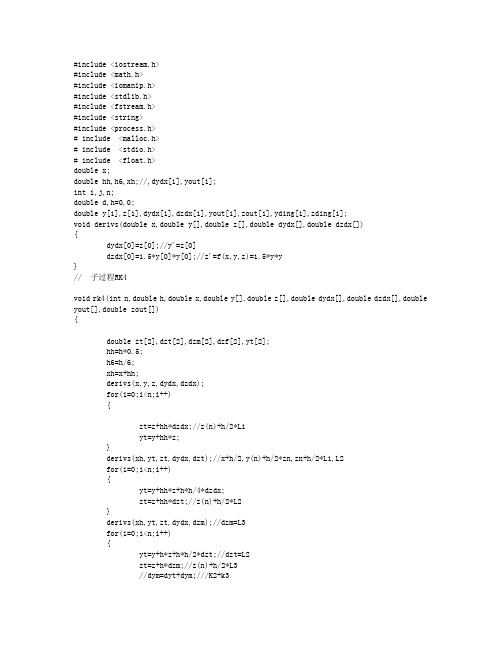
zjia[0]=zding[0]+dlts;//zjia[0]=s(i)+dlts(i)
dydx[0]=zjia[0];//y'=z[0]
dzdx[0]=1.5*yding[0]*yding[0];//z'=f(x,y,z)=1.5*y*y
for(j=0;j<5;j++)
{
h=0.2+0.2*j;
//
cout<<zout<<endl;//yout从这里输出,切记!!!//
z=zout;
cout<<h6;
} for(i=0;i<n;i++)
{
dzm=0.0;
dzt=0.0;
yt=0.0;
zt=0.0;
dzf=0.0;
}
}
void main()
{
double F[1],Fs[1],zjia[1],dlts=0.00001;
dydx[0]=z[0];//y'=z[0] dzdx[0]=1.5*y[0]*y[0];//z'=f(x,y,z)=1.5*y*y } // 子过程RK4
void rk4(int n,double h,double x,double y[],double z[],double dydx[],double dzdx[],double yout[],double zout[]) {
rk4(n,h,x,yding,zjia,dydx,dzdx,yout,zout);
//
cout<<"yout["<<h<<"]="<<yout[0]<<endl;
智慧靶场训练系统在哪设计方案
智慧靶场训练系统在哪设计方案智慧靶场训练系统的设计方案主要涉及硬件设备、软件系统、训练模块和数据分析等方面的内容。
以下是一个大致的设计方案,共计约1200字。
1. 硬件设备:智慧靶场训练系统的硬件设备包括靶场设备、感应设备、监控设备和计算设备。
靶场设备:根据不同训练需求,靶场设备可以分为靶板、移动式靶子和仿真敌军装备等。
靶场设备需要具备可调节的难度和复杂度,可以根据训练要求进行自动调节。
感应设备:利用现代感应技术,为训练系统提供准确的数据反馈。
如摄像头、红外传感器等,用于捕捉训练者的动作、姿势等。
监控设备:用于实时监控和记录训练过程。
如监控摄像头和麦克风等,可以用于捕捉训练者的表情、声音等。
计算设备:用于实时处理和分析训练数据。
可以选择高性能的计算机服务器。
2. 软件系统:智慧靶场训练系统的软件系统主要分为训练控制系统和数据分析系统两个部分。
训练控制系统:提供训练任务的设置和控制,包括难度设置、训练时间控制、训练模式选择等功能。
可以根据训练者的水平和需求进行定制化设置。
数据分析系统:用于对训练数据进行分析和统计,提供训练者的成绩评估和训练效果分析,以及训练数据的可视化展示。
可以通过机器学习算法,对训练者的表现进行评估和预测,提供个性化的训练建议。
3. 训练模块:智慧靶场训练系统的训练模块根据不同训练需求,可以包括射击训练、战术演练和心理训练等内容。
具体训练内容可以根据不同用户的需求进行定制。
射击训练模块:通过靶场设备、感应设备和监控设备,模拟真实的射击场景,进行射击技能训练。
可以提供靶场调节、子弹轨迹模拟、射击姿势评估等功能。
战术演练模块:通过靶场设备和感应设备,模拟真实的战术环境,进行战术技能训练。
可以提供多人协同演练、战术选择评估、战术实施模拟等功能。
心理训练模块:通过监控设备和感应设备,对训练者的心理状态进行监测和训练。
可以提供心理压力评估、应激反应训练等功能。
4. 数据分析:智慧靶场训练系统的数据分析功能可以对训练数据进行分析和统计,提供训练效果评估和个性化训练建议。
第一人称射击类系统设计项目书
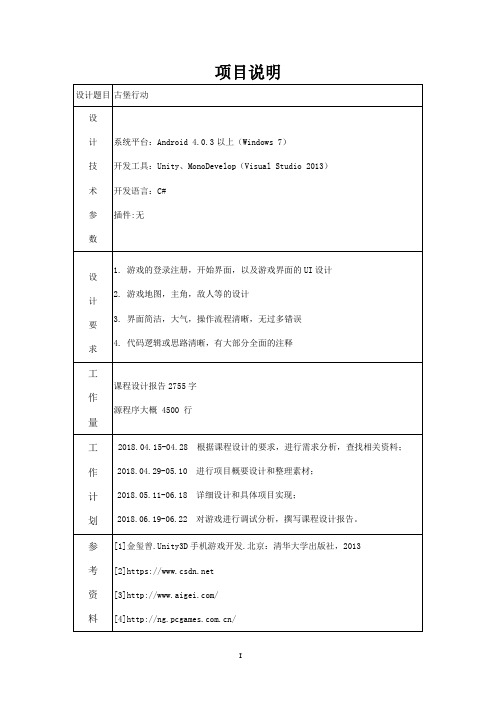
项目说明目录1 需求分析 (1)2 概要设计 (1)2.1 设计思路 (1)2.2 存储结构设计 (1)2.3 功能模块设计 (2)3 详细设计 (3)3.1 游戏工程视图 (3)3.2 游戏界面布局 (4)3.3 功能模块设计实现 (5)3.4 其他设计实现 (11)3.4.1 摄像机的跟随 (11)3.4.2 游戏音效的添加 (12)3.4.3 游戏开始界面的设计 (12)4 运行与测试 (14)5 总结.............................................. 错误!未定义书签。
小组成员分工表...................................... 错误!未定义书签。
1 需求分析1.1技术需求此游戏是在Unity2018上开发出来的,Unity2018可以支持2D、3D场景的编辑,本游戏是基于3D场景开发的。
游戏中的脚本语言使用的是C#,Unity2018中的microsoft visual 2017为脚本编辑提供了平台。
1.2功能需求1.2.1古堡行动游戏玩法介绍:玩家通过注册登录帐号进入游戏,游戏中设有三个敌人出生点,并且会自动寻路并攻击玩家,玩家通过持枪射击对抗敌人,每击杀一个敌人玩家为加一分,玩家有血条,地图会随机生成血包,供玩家增加血量,当玩家血量值为0时,游戏失败;当玩家击杀敌人个数达到200个后,游戏即为胜1.2.2古堡行动游戏制作功能的需求:登录注册、玩家和敌人AI、游戏特效(子弹设计特效,敌人死亡特效)、敌人生成、敌人自动寻路、碰撞检测、UI界面设计.2 概要设计2.1 设计思路我们选择第一人称射击游戏的设计来源来自经典的cf游戏,但由于能力和时间原因,我们做出来的很简单。
设计思路是要保证游戏拥有最基本的第一人称射击游戏的功能。
2.2 存储结构设计游戏中出现的所有类:例如:Player类:玩家类Enemy类:敌人类AppearEnemy类:敌人出生点AddBlood类:血包Bullet类:子弹ShootAudio类:射击音效GameManager类:游戏状态设计Xml文档<Root><User user_name="Admin" user_password="123" qq="123456" /> <User user_name="ylb" user_password="123" /></Root>2.3 功能模块设计游戏具有六大功能模块,分别为:游戏开始模块(1)战斗模块(2)生存模块(3)场景切换模块:包括场景触发器的设计;(4)分数统计模块:包括对玩家分数的显示;(5)游戏结束模块:包括游戏结束菜单的设计;其功能模块图如图2-1所示:图2-1功能模块图3 详细设计3.1 游戏工程视图“Audios”文件夹如图3-1所示:图3-1 “Audios”文件夹“Textures”文件夹如图3-2所示:图3-2 “Textures”文件夹然后我们需要新建“Materials”:材质文件夹;“Prefabs”:预制文件夹;“Scenes”:游戏场景文件夹;“Scripts”:脚本文件夹。
X-ray自动钻靶机操作指导书

X-ray自动钻靶机操作指导书1.0 目的:建立生产操作规范,使X-RAY钻靶机得以顺利进行生产2.0 范围:适用于我司ADT-900XP2 X-RAY自动钻靶机。
3.0 职责:3.1.生产部负责具体操作及工艺纪律、工艺卫生的执行。
3.2.工艺部负责提供工艺参数。
3.3.品质部IPQC负责相关相关物理性能测试及流程稽查。
3.4.设备部负责生产设备的保养维修。
4.0 定义:(无)在压合后的外层或次外层的铜表面钻出内层定位孔,达到内层或次外层对准之目的;X-Ray 打靶机就是利用X-Ray 在不同介质中不同的穿透能力,以CCD 摄像头接收经板子吸收后之不同能量,再经图像形成装置与信号放大装置将信号与图像传递至计算机系统,后经图像解晰,发现于内层中之目标点,再经一定定位程序后,依据程序设定在预定之位置钻出有与外层对准之功能之定位孔。
5.0 内容:5.1.作业前准备5.1.1.物料工具:防静电手套,钻咀,自主检查记录表,笔,卷尺,千分尺,斜板车。
5.1.2.生产前须依MI要求的孔径更换钻咀,钻咀直径须经千分尺检测5.2.操作步骤:5.2.1.开机:将主电源开关由OFF转向ON位置。
5.2.2.将紧急停止按钮ECG依箭头指示方向松开。
5.2.3.按电脑指示完成开机程序,当完成电脑开机步骤程序后屏幕将显示JDQTech操作的捷径,用鼠标点击,便可进入操作界面。
注意事项:开机前先要把稳压器及高压气打开。
5.3.基本资料设定即操作:5.3.1.点击基本资料菜单,可选择已作好的资料和新增料号(上图为操作界面主菜单)。
5.3.2.输入新增料号的基本数据,(板长,板宽,长边管位A1A2距离,宽边管位A1B1距离,A1A2至前缘。
注意制板尺寸,最大700MM*620MM 最小300MM*100MM,最后保存资料。
A1A2距离不可低于300MM,A1B1最小距离不可低于100MM。
)5.3.3.注意新增料号时要选择钻孔方式:可分两种钻孔方式,重心基准钻孔与中央基准钻孔,在这两种钻孔方式中又可分钻两个孔,三个孔及四个孔,同时钻四个孔时不能设定为中央基准。
靶标系统设备实施方案
靶标系统设备实施方案一、引言。
靶标系统设备是一种用于精确测量和监测目标的装置,广泛应用于军事训练、射击比赛、武器测试等领域。
本文将介绍靶标系统设备的实施方案,包括设备选型、布置方案、操作流程等内容,旨在帮助用户更好地使用靶标系统设备。
二、设备选型。
在选择靶标系统设备时,需考虑以下几个方面:1. 测量精度,靶标系统设备的测量精度直接影响到训练或测试的效果,因此需要选择具有较高测量精度的设备。
2. 适用范围,不同的靶标系统设备适用于不同的场景,如室内射击训练、野外射击演习等,需根据实际需求选择适用范围广泛的设备。
3. 稳定性,设备的稳定性直接关系到使用过程中的可靠性,选择稳定性较高的设备可以减少故障发生的可能性。
三、布置方案。
靶标系统设备的布置方案应根据实际训练或测试场地的情况进行调整,一般包括以下几个步骤:1. 场地勘察,在进行布置之前,需要对训练或测试场地进行勘察,了解场地的地形、地貌、环境等情况,以便确定最佳的设备布置方案。
2. 设备摆放,根据勘察结果,合理摆放靶标系统设备,确保设备之间的距离和角度符合训练或测试的要求。
3. 联网设置,对于多台靶标系统设备,需要进行联网设置,确保设备之间的数据同步和互动。
四、操作流程。
靶标系统设备的操作流程一般包括以下几个步骤:1. 设备启动,按照设备说明书的要求,正确启动靶标系统设备,并进行系统自检。
2. 参数设置,根据训练或测试的要求,设置靶标系统设备的参数,包括靶标距离、运动速度、靶面大小等。
3. 监控操作,在训练或测试过程中,需要对靶标系统设备进行监控操作,确保设备运行正常。
4. 数据记录,靶标系统设备通常会记录训练或测试过程中的数据,包括命中率、射击时间等,用户可以通过数据分析来评估训练或测试的效果。
五、总结。
靶标系统设备的实施方案对于训练或测试的效果具有重要影响,正确选择设备、合理布置和规范操作流程是保证设备正常运行和提高训练或测试效果的关键。
希望本文介绍的内容能够帮助用户更好地使用靶标系统设备,提高训练或测试的效果。
军用训练靶数字系统设计
第I页共Ⅱ页目录1课题的研究 (1)1.1课题背景 (1)1.2课题研究的内容 (1)1.3课题研究的目的及意义 (1)2军用训练靶数字系统的方案设计 (2)2.1设计任务 (2)2.2方案确定 (2)2.2.1系统功能研究 (3)2.2.2决定方案因素 (4)2.2.3数据传输方案 (4)2.2.4信号采集方案 (5)2.2.5系统方案确定 (6)2.3军用训练靶数字系统的组成 (6)2.3.1军用训练靶数字系统结构 (6)2.3.2系统各个模块功能描述 (7)3军用训练靶数字系统硬件电路设计 (9)3.1设计该系统硬件需要具备的知识 (9)3.2相关功能模块设计 (9)3.2.1采样模块设计 (9)3.2.2电源电路设计 (10)3.2.3复位电路设计 (11)3.2.4显示电路设计 (12)3.2.5通信接口设计 (12)3.3相关设计原理介绍 (13)3.3.1主控电路原理 (13)3.3.2显示电路原理 (13)3.3.3计算机串口接口说明 (15)3.4无线传输模块介绍 (16)3.5相关参数的设定 (17)3.5.1XL01-232AP2模块的设置 (17)3.5.2波特率的设置 (17)3.6串口数据传输技术 (18)桂林电子科技大学毕业设计(论文)专用纸第II页共Ⅱ页3.6.1单片机与模块之间的通信 (18)3.6.2单片机与电脑之间的通信 (18)4军用训练靶数字系统软件部分 (19)4.1单片机编程 (19)4.1.1软件功能分析 (19)4.1.2主要程序设计 (20)4.2PC机V C++编程 (21)4.2.1Vc++下串行编程的方法 (21)4.2.2串行通信控件MSComm (22)4.2.3Vc++下界面制作技术 (23)5军用训练靶数字系统制作及调试 (24)5.1系统PCB板的设计 (24)5.1.1布局 (24)5.1.2布线 (24)5.2硬件调试 (25)5.2.1元器件测试 (25)5.2.2芯片管脚信号测试 (26)5.3软件调试 (27)5.3.1系统主控软件调试 (27)5.3.2Vc++界面绘图程序段调试 (28)5.3.3界面图像重叠错误调试 (30)5.3.4界面控件覆盖错误调试 (31)6总结 (32)谢辞 (33)参考文献 (34)附录 (35)附录1发送端控制程序 (35)附录2接收端控制程序 (44)附录3界面V C++程序 (48)附录4系统原理图 (62)附录5系统PCB图 (63)1课题的研究1.1课题背景目前部队在每次射击训练完后,大都采用人工现场报靶的方式来报告成绩。
课程设计激光打靶系统
摘要本毕业设计主要设计自主研发的激光打靶系统的信号处理过程,继而实现整个打靶系统。
激光打靶系统主要包括半导体激光枪、光电探测器和信号处理电路,信号处理过程是整个系统的关键。
激光打靶的打靶过程,由激光枪发射激光脉冲信号,光电靶接收激光脉冲信号,经过系列信号处理过程最终得到打靶的结果。
光电靶由许多块的光电探测器组成,每块不同位置的光电探测器对应不同编号,从打靶的实际情况出发,确定了相应的编号规则。
打靶的成绩由激光所击中的光电探测器的编号来判定。
激光打靶系统的主要信号处理过程包括:信号的放大、编码和数据传输。
信号由光电探测器检测后传送到相应的放大电路,放大电路采用集成运算放大器。
按原先对光电探测器的编码规则采用多路优先编码器对信号进行编码。
最后把编码值以串口的形式传送到计算机,利用计算机的强大功能对打靶结果进行各种处理。
与计算机之间的串行数据传输由89C2051单片机实现。
89C2051单片机的程序,使用keil编译器进行设计和调试完成,其主要功能是控制数据的串行传送,实现与计算机的串口通信。
该信号处理系统实现了对信号的良好检测。
与计算机之间的串口通信可以实现数据在计算机上的显示、统计、储存等功能,为打靶者提供非常直接、准确的打靶结果,有利于提高打靶效果。
关键词:激光打靶;信号处理;信号编码;串行传输ABSTRACTThe main aim of this thesis is to design and realize signal processing of a self-developed laser target shooting system and then realize the whole laser target shooting system. The laser target shooting system consists of semiconductor laser gun, photoelectric detector, and signal processing circuit, which is the key part of the whole system. Laser target shooting process go though following steps: laser gun emitted a pulse of laser, which would be received by the laser target and the results of shooting will be shown on screen of computer by series signal processing. The laser target consists of some silicon photoelectric units that were encoded with different numbers according to certain rule. The result of the shooting will be got when detecting the number of the photoelectric unit that receives the laser pulse.The signal processing of the laser target shooting system mainly consists of signal amplification, signal encoding and data transmission. The inspected photoelectric signal was then amplified by operator amplifiers, coded by multiplex priority encoder according to the prearranged rule, and then transferred to computer by 89C2051 MCU through its serial port. And then computer can process the signal. The program of 89C2051 MCU is designed in keil and debugged using keil compiler. It is designed to control the data transmission with computer.The designed signal processing system can detect signal effectively. Through the serial data transmission, computer can process the shooting result, such as display, statistics and storage etc. It provide direct and exact shooting result for trainer, so it can increase the efficiency of the shooting training.Key words:laser target shooting;signal amplification;signal encode;serial data transmission目录1 引言 (1)2 概述 (2)2.1 激光打靶系统概述 (2)2.2 本设计方案思路 (3)2.3 研发方向和技术关键 (3)2.4 主要技术指标 (3)3 总体设计 (4)3.1 激光的检测 (4)3.2 靶位的划分 (4)3.3 编码标准 (5)3.4 成绩的传送和处理 (5)3.5 其他说明 (5)4 硬件设计 (6)4.1 信号放大电路 (6)4.2 整形电路 (8)4.3 编码电路 (9)4.4 串行传送 (11)4.5 电平转换 (13)5 软件设计 (14)5.1 总体方案 (14)5.2 程序流图 (14)5.3 模块说明 (15)6 制作与调试 (18)6.1 硬件电路的布线与焊接 (18)6.2 调试 (18)7 结论 (20)致谢 (21)参考文献 (22)附录 (23)1 引言目前的射击打靶训练,基本以实弹训练为主,国防开支大,危险系数高。
飞机射击游戏程序设计
《程序设计基础》课程设计——飞机射击游戏程序设计一、课程设计目的和要求课程设计是课程教学中的一项重要内容,是完成教学计划达到教学目标的重要环节,是教学计划中综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义,开设课程设计的目的:1、深化已学的知识,完成从理论到实践的转化通过此次课程设计,进一步加深对C++语言和运用的了解,将理论知识运用于开发的实践,并在实践中逐步掌握软件工具的使用。
2、提高分析和解决实际问题的能力课程设计不仅是软件工程实践的一次模拟训练,同时通过此次实践,积累经验,提高分析和解决问题的能力。
3、熟悉VC集成开发环境。
4、了解简单的数据结构和算法。
5、提高学生在实际操作中收集信息、对信息进行价值判断、进行信息整理、信息加工的能力;6、培养“开拓创新“的能力课程设计的要求体现于整个工作的各个阶段中,可根据所选课题的特点而有所侧重,但应达到如下的基本要求:1、根据课题任务制定合理、可行的工作计划任务;2、制定适当的技术方案;3、学生在老师的指导下独立完成设计过程;4、撰写课程设计说明书;5、通过课程设计检查评定。
二、课程设计任务内容设计一个飞机射击小型游戏。
1.学生根据自己的兴趣爱好或专长,确定一个课程设计主题;2.根据确定的主题,通过各种途径收集、整理、加工所需要的信息;3.利用C++语言和其它制作软件设计制作各个模块;4.将各个模块联系起来;5.调试和运行完成的程序;6.将整个制作过程用书面形式写出来。
三、详细设计说明(1)需求说明我所设计的这个飞机游戏,是由两部分组成。
我方飞机在下面,向上发射子弹射击敌方飞机。
敌方飞机从上方下来,向下发射子弹。
我方飞机每接到一个我方子弹后便会增加火力,敌方火力也会增强且敌方飞机熟增多。
我方飞机共五次生命,被敌方射中五次,则游戏结束。
此时可以按esc退出,也可以继续游戏。
openmv激光打靶代码
openmv激光打靶代码OpenMV是一款基于Python的开源机器视觉平台,它可以用于各种应用,包括激光打靶。
在这篇文章中,我将介绍如何使用OpenMV编写激光打靶的代码。
首先,我们需要准备一些硬件设备。
除了OpenMV摄像头外,我们还需要一个激光模块和一个靶标。
激光模块用于发射激光束,而靶标用于接收激光束并显示击中位置。
接下来,我们需要编写代码来控制OpenMV摄像头和激光模块。
首先,我们需要导入一些必要的库,包括`sensor`、`image`和`time`。
然后,我们需要初始化摄像头和激光模块。
```pythonimport sensorimport imageimport time# 初始化摄像头sensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QVGA)sensor.skip_frames(time = 2000)# 初始化激光模块laser = pyb.LED(3)laser.off()```接下来,我们需要编写一个函数来检测靶标的位置。
我们可以使用OpenMV的图像处理功能来实现这一点。
首先,我们需要捕获一帧图像,并将其转换为灰度图像。
然后,我们可以使用`find_blobs`函数来查找靶标的位置。
```pythondef detect_target():# 捕获一帧图像img = sensor.snapshot()# 将图像转换为灰度图像img = img.to_grayscale()# 查找靶标的位置blobs = img.find_blobs([thresholds], pixels_threshold=200,area_threshold=200)# 如果找到了靶标if blobs:# 获取靶标的中心位置x = blobs[0].cx()y = blobs[0].cy()# 返回靶标的位置return (x, y)# 如果没有找到靶标else:# 返回Nonereturn None```现在,我们可以编写一个主循环来控制激光打靶的过程。
打靶机作业指导书(1)
4.4.1.3旋开压板上之固定螺丝, 并将其置于压板下方使压板向上。
4.4.1.4移开圆形铁片。
4.4.1.5用开口较小之板手置于 Collector 之底部并向上施力使 Collector 向上移动
4.4.1.6利用开口较大之板手置于Collector 上并与开口较小之板手作反方向施力而将 Collector 之头旋开
4.4.2.4在钻 10 个孔之过程中都会显示每次钻孔之中心位置, 每次数值误差要 2.0内, 否
则按“A”结束此次功能, 再回到(第2项) 重做, 每次钻孔只需按“2”即可。
4.4.2.5如所钻 10 个孔都在误差 2.0 内则按“2”将新的中心点设定入电脑内结束设定。
4.4.3辩认黑白底: 功能“19”
4.4.4辩认靶型: 功能“20”
选择所钻靶型的大小,以免误钻到板上其它的圆形。按“选择键”, 再按数字键“20”,而当屏幕出现“辩认靶型”与一中心十字线, 将靶型的中心部分置于十字线下并按数字键“2”,此时注意红色区域是否为均匀的圆形, 否则完成靶型的确认再按“2”而结束此功能, 调整光圈使靶型能黑白分明, 再用功能“19”辩认黑白底之后现执行辩认靶型工作。
向左后方移动至归零点后再移出至摄影机下。
4.4.6手动钻靶: 功能“03”
如果靶型有缺陷的时候, 因难以确认靶型而无法使用自动钻孔, 这种靶型可用手动钻靶
4.4.6.1按“选择键”, 再按数字键“03”,而屏幕会出现红色的三圆形与一十字线。
4.4.6.2 将有缺陷之靶型置于上述红线之下, 使靶型之各圆与红色的圆等距之位置, 并且此靶型之中心点与十字线相重叠。
4.4.1.10打开气压开关 , 再按 "选择键" 而使系统进入工作状态。
枪械系统 - 枪械时间分析程序 v6.0 发布单说明书
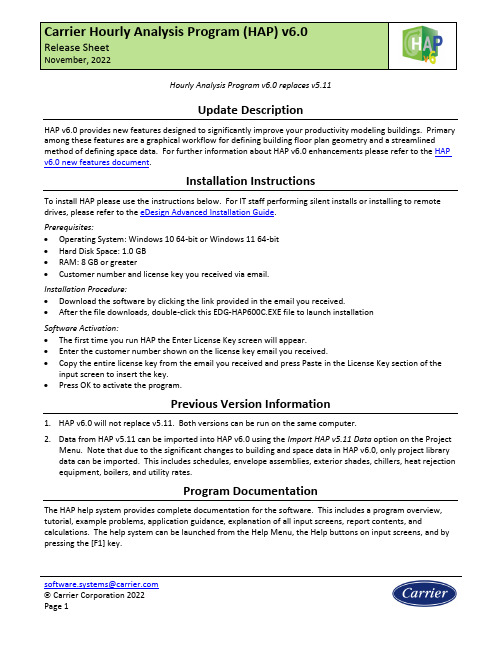
Carrier Hourly Analysis Program (HAP) v6.0 Release SheetNovember, 2022****************************© Carrier Corporation 2022 Page 1 Hourly Analysis Program v6.0 replaces v5.11Update DescriptionHAP v6.0 provides new features designed to significantly improve your productivity modeling buildings. Primary among these features are a graphical workflow for defining building floor plan geometry and a streamlined method of defining space data. For further information about HAP v6.0 enhancements please refer to the HAP v6.0 new features document .Installation InstructionsTo install HAP please use the instructions below. For IT staff performing silent installs or installing to remote drives, please refer to the eDesign Advanced Installation Guide .Prerequisites:∙Operating System: Windows 10 64-bit or Windows 11 64-bit∙Hard Disk Space: 1.0 GB ∙RAM: 8 GB or greater∙Customer number and license key you received via email.Installation Procedure:∙Download the software by clicking the link provided in the email you received.∙After the file downloads, double-click this EDG-HAP600C.EXE file to launch installationSoftware Activation:∙The first time you run HAP the Enter License Key screen will appear.∙Enter the customer number shown on the license key email you received.∙Copy the entire license key from the email you received and press Paste in the License Key section of theinput screen to insert the key.∙Press OK to activate the program.Previous Version Information1. HAP v6.0 will not replace v5.11. Both versions can be run on the same computer.2. Data from HAP v5.11 can be imported into HAP v6.0 using the Import HAP v5.11 Data option on the Project Menu. Note that due to the significant changes to building and space data in HAP v6.0, only project library data can be imported. This includes schedules, envelope assemblies, exterior shades, chillers, heat rejection equipment, boilers, and utility rates.Program DocumentationThe HAP help system provides complete documentation for the software. This includes a program overview, tutorial, example problems, application guidance, explanation of all input screens, report contents, and calculations. The help system can be launched from the Help Menu, the Help buttons on input screens, and by pressing the [F1] key.。
指挥中心设备软件介绍 - 西安立靶科工贸有限公司
指挥中心设备软件介绍
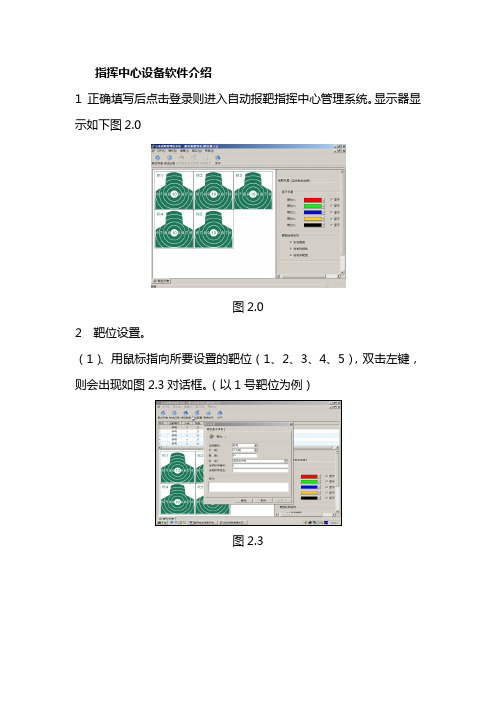
1 正确填写后点击登录则进入自动报靶指挥中心管理系统。
显示器显示如下图2.0
图2.0
2 靶位设置。
(1)、用鼠标指向所要设置的靶位(1、2、3、4、5),双击左键,则会出现如图2.3对话框。
(以1号靶位为例)
图2.3
3 界面功能设置。
本套系统采用新型的星星式网络管理,界面功能新颖全面,且操作简单。
(1)、当前界面呈现多画面显示(五个靶位同时都显示),使指挥中心可以直观的看见各个射手的射击情况。
如图2.9
图2.9
(2)、如要换为单画面显示(在一个靶位上同时显示五个靶位的射击成绩),操作员可在界面右侧报靶设置中绘制靶图选项取消多靶位显示,则显示器显示如图3.0单画面。
图3.0。
带有语音系统的运动场打靶报靶系统设计_闫辰奇
有通用性, 可在支持程序存储器在系统编程特性的类似芯片中 扩展应用。
参考文献 [1]李刚,林凌.与 8051 兼容的高性能、高速单片机— ——C8051Fxxx[M].
北 京 :北 京 航 空 航 天 大 学 出 版 社 ,2002 [2]潘 琢 金 , 施 国 君 .C8051Fxxx 高 速 SOC 单 片 机 原 理 及 应 用 [M]. 北
业 出 版 社 ,2002 [收 稿 日 期 :2012.6.28 ]
Abstract The wireless shooting automatic report target system based on microcontroller has the characteristic of high precision, fast calculation,small product size, portable software,easy upgrade system,etc.While reducing the cost not only to improve the efficiency of shooting,but also to avoid the misjudgment of Байду номын сангаасhe reported target for the subjective causes.To some extent,protect the personal safety of the shooting range,satisfy the requirements of safe and efficient in shooting practice. Keywords:targeting system,SCM,wireless transmission,phonetic technology
常见的靶场操作方法
常见的靶场操作方法
常见的靶场操作方法包括:
1. 搭建和部署靶场:根据攻击漏洞类型或训练需要,搭建不同类型的靶场环境,包括服务器、应用程序、数据库等,并配置相应的网络设置和安全策略。
2. 启动和控制攻击:使用各种工具和技术模拟攻击,包括扫描、漏洞利用、恶意代码注入等,并监控攻击效果和行为。
3. 收集和分析攻击数据:收集和记录攻击数据,包括攻击来源、攻击方式、攻击目标等,并进行数据分析和挖掘,为安全决策提供支持。
4. 隔离和修复漏洞:及时发现和隔离漏洞,修复和升级相关系统和应用程序,并规范化操作流程和安全管理机制,提高安全防御能力和响应能力。
5. 维护和更新环境:定期维护和更新靶场环境,包括修复漏洞、升级应用程序、检查配置文件等,确保环境的安全性和稳定性。
6. 培训和分享经验:组织培训和分享经验,提高人员的安全意识和技能水平,促进安全文化的形成和推广。
层压打靶作业指引
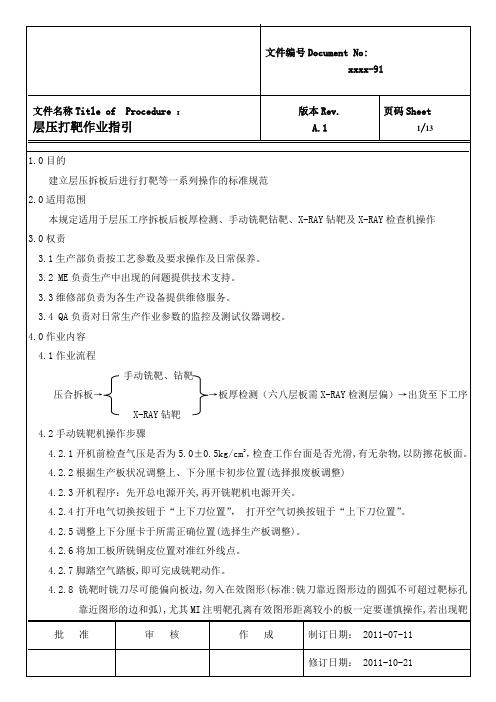
定“前二后一“的靶孔模式,然后点击靶标设定X-RAY图案清晰度;4.4.6按鼠标右键进行圆心设定,选择白-黑模式,然后存挡确认,设置完前2个靶标后,移位至D靶,设置另外一个靶标,进行存挡后返回主控页面,即可进行打靶作业;4.5 MMX-888双轴X-RAY打靶机操作步骤4.5.1检查气压在5.0±0.5kg/cm2,打开主电源开关,再按操作盘左上的POWER ON键打开X-RAY机电源开关。
4.5.2设备启动后windows之后,MMX-888软体会自动启动,约15sec后进入“原点复归”画面。
按[开始]进行原点复归,勿按[OPTION];若按[OPTION],原点复归则不能进行。
4.5.3原点复归完了后,自动进入[set mode]状态:4.5.4若使用前次的轴间距离,直接按画面中的[OK].4.5.5如果用已登陆的其它DATA时,按画面中的[取消],之后按Set mode基本画面中的[读取],再按画面中的[OK],从所保存的file list中选择欲读出的file.按中间的[ ],即可读出file,此后按画面右下的[终了].4.5.6如果对基板DATA进行新的设定时,按画面中央的[取消],之后按set mode基本画面中[ASMPLE选择]显示如下:4.5.7如果基板内的MARK只有左右2个进行补偿钻孔时,最初的2个位置进行[补偿]:4.5.8如果基板内的MAR分布为左右2个十方向孔,对2孔作补偿钻孔,对方向孔进行MARK中孔时, 最初的2个位置设定为[补偿],第3个设定为[中心]:4.5.9如果基板内的MARK分布为前后左右4孔,对纵横进行补偿钻孔时,最初4个位置全部设定为[补偿]:4.3.4轴间距离变更时,按画面中央的[OK],改变轴间距离,移动左右调芯TABLE,有必要进行补正板登陆,按画面中央的[OK],输入生产LOT NO.则加工记录用COG FILE各称保存下来.4.4补正板登录完了后,有必要进行ZERO SET, 按画面中央的[OK],移到zero Set mode.4.5.10.将左右侧X线打开,按[Spindle]键,使SPINDLE LAMP处于点灯状态.放入空的PC板,进行左右侧X线zero set 设定.调整基板位置,在计测领域内显示出基板的无MARK,线路的空白部分. 按[ZERO SET]在画面中央附近自动进行钻孔.4.5.11看屏幕显示数据,若误差大于5mil以上,按[prill Pos reset]系统重新钻孔.略移动基板位置,如此钻3次,确认显示的孔位置的偏差已小于2mil,按[钻头位置RESET].4.5.12若钻孔位置有2行时,最初一行的ZERO SET终了后,会显示出是否要往下一行移动的MESSAGE,按[OK].4.5.13最终行的ZERO SET终了后,TABIE返回初期位置时,会显示出完了的MESSAGE,按[OK].4.5.14进行钻孔.4.5.14.1按操作盘的[钻头],打出钻孔MODE.4.5.14.2按SPINDLE的ON键,使SPINDLE的LAMP点灯4.5.14.3进行2轴钻孔时使左右两侧的X线ON4.5.14.3.1只进行左侧1轴钻孔时,仅使左侧的X线ON4.5.14.3.2只进行右侧1轴钻孔时,仅使右侧X线ON4.5.14.4显示出须进行背景登陆,按[现在进行]4.5.14.5显示出钻孔的MARK,在TV MONITOR上显示出欲钻孔的MARK,调节X线电压,电流的VOLUME,使MARK的对比度处最佳状态.注意:电流大小不要超过0.3A.4.5.14.6进行背景登陆,选择基板的无MARK部分,其辉度须与MARK的背景部分有相近程度,显示出此无MARK部分,按MONITOR下部的背景登陆[左背景记忆][右背景记忆],进行左右2轴钻孔时,左右两边的背景登陆都进行.4.5.14.7进行钻孔:显示出欲钻孔的MARK,踏脚踏开关4.5.15关机:将左右X线灯和spindle灯关掉,然后将设备电源POWER开关和“LOCK”开关关掉即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序清单计算机0206班陈召学号:012002013805 试验台:87、88 整个系统包含两大块程序:下行机的client.cpp和主控机的host.cpp一、下行机程序:client.cpp1、程序功能:负责读取靶数,并进行相关的显示,同时负责与主控机进行通信;2、开发环境:TC2.0;3、开发人:陈召,左明,许诺,刘树伟4、开发日期:2005年9月7日源代码:#include <conio.h>#include <stdio.h>#include <stdlib.h>#include <math.h>#include <dos.h>#include <graphics.h>#define data51 0x308 /*8251数据口*/#define ctrl51 0x309 /*8251命令/状态口*/#define dataa55 0x300 /*8255数据A口*/#define datab55 0x301 /*8255数据B口*/#define datac55 0x302 /*8255数据C口*/#define ctrl55 0x303 /*8255命令口*/void int51();void int55();int send(int,int);void main(){int temp,temp2,total,count=0;int data,x0,y0,c=0;double ab,r,x,y;float e;int graphdriver=VGA,graphmode=VGAHI;int flag=0x00;int51();int55();/*struct fillsettingstype save;*/initgraph(&graphdriver,&graphmode," ");/*getfillsettings(&save);*/ /*得到初始化时填充模式*/setbkcolor(EGA_BLUE);cleardevice();setcolor(12);circle(320,220,30); /*在显示器上显示靶图*/circle(320,220,45);circle(320,220,60);circle(320,220,75);circle(320,220,90);circle(320,220,105);circle(320,220,120);circle(320,220,135);circle(320,220,150);circle(320,220,165);while(1){dotemp=inportb(datab55);while(flag==(temp&0x80)); /*当从8255b口读出的数据最高位改变时,跳出循环*/if(flag==0) { /*将标志flag改变*/flag=0x80;}else flag=0x00;data=temp&0x7f; /*将数据的最高位置0*/if(data>10) data=0;count++; /**/c=c+19;e=c%100;e=e/100;if(data==0){;}else{r=(10-data)*15+22;x=r*e;ab=r*r-x*x;y=sqrt(ab);if(e>0.5){ /*随机决定点x0坐标的区间*/x0=320+x;}else x0=320-x;if(e>0.5){ /*随机决定点y0坐标的区间*/y0=220+y;}else y0=220-y;setcolor(15);circle(x0,y0,6);}/*转入发送程序*/total=send(data,count);if(count==10){/*getch();*/closegraph();count=0;flag=0x00;printf("\n**********************************************************");printf("\n ***************Welcome to our shooting game!********************");printf("\n**********************************************************");printf("\n************************************************************* ************");printf("\nyou have shot %d",total);printf("\npress anykey to restart");printf("\npress 2 to exit\n");scanf("%d",&temp2);if(temp2==2){count=send(0xff,0);break;}clrscr();/*struct fillsettingstype save;*/initgraph(&graphdriver,&graphmode," ");/*getfillsettings(&save);*/ /*得到初始化时填充模式*/setbkcolor(EGA_BLUE);cleardevice();setcolor(EGA_GREEN);circle(320,220,30); /*重新在显示器上显示靶图*/setcolor(12);circle(320,220,45);circle(320,220,60);circle(320,220,75);circle(320,220,90);circle(320,220,105);circle(320,220,120);circle(320,220,135);circle(320,220,150);circle(320,220,165);}}}int send(int data,int count){ /*串行通信程序*/int status,rletter;dostatus=inportb(ctrl51); /*获取8251 TXRDY 状态*/while((status&0x01)==0); /*已准备好,则将数据发送出去*/outportb(data51,data);if(count==10){dostatus=inportb(ctrl51);/*已准备好,即有数据传送过来,则接收1个字符*/while((status&0x02)==0);rletter=inportb(data51);return rletter;}else return 0;}void int51() /*8251的初始化程序*/{outportb(ctrl51,0x00);delay(100);outportb(ctrl51,0x40);/*8251复位*/delay(100);outportb(ctrl51,0x4e);/*8251A方式命令*/delay(100);outportb(ctrl51,0x27);/*8251A工作命令*/}void int55(){ /*8255的初始化程序*/outportb(ctrl55,0x92);}二、主控机程序:host.cpp1、程序功能:从下行机获取数据并储存,当达到一定的数目时计算总成绩返回到下行机;还包括其他一些显示功能;2、开发环境:TC2.0;3、开发人:左明,陈召,许诺,刘树伟4、开发日期:2005年9月7日源程序:#include<stdio.h>#include<conio.h>#include<dos.h>#define data51 0x308 /*8251数据口*/#define ctrl51 0x309 /*8251命令/状态口*/#define dataa55 0x300 /*8255数据A口*/#define datab55 0x301 /*8255数据B口*/#define datac55 0x302 /*8255数据C口*/#define ctrl55 0x303 /*8255命令口*/#define COUNT 10 /*每局打靶的次数*/void int51()/*初始化函数*/{outportb(ctrl51,0x00);/*空操作*/delay(100);outportb(ctrl51,0x40);/*8251复位*/delay(100);outportb(ctrl51,0x4e);/*8251A方式命令*/delay(100);outportb(ctrl51,0x27);/*8251A工作命令*/}void main(void){int a[COUNT];int j;int b=0;int e;int i=0;int status;int temp;int51();printf(" **************************************\n\r ");printf(" * THE SHOOTING SYSTEM *\n\r ");printf(" * ver1.0 cz xn zm lsw *\n\r ");printf(" ********************************\n\r ");for(;;)/*总循环*/{if(i==COUNT){ /*如果一局打完输出此局各次的成绩和总成绩*/for(j=0;j<COUNT;j++){b+=a[j];}printf("\n***************************************");printf("\nYour total score is :%d",b);i=0;dostatus=inportb(ctrl51);/*获取8251 TXRDY 状态*/while((status&0x01)==0);/*已准备好,则将键入的字符发送出去*/outportb(0x308,b);b=0;for(j=0;j<COUNT;j++) /*将各元素的值清零*/a[j]=0;}dostatus=inportb(0x309);/*检测8251状态,若有数据传送过来,则接收1个字符*/while((status&0x02)==0);a[i++]=inportb(0x308);printf("\nThe score of your %dth %d",i,a[i-1]);if(a[i-1]==255){clrscr();printf("\nIf you want to EXIT:press Esc!\nCONTINUE:press any key!");if((e=getche())==0x1b)/*是ESC?是,则退出,并返回DOS*/break;}}}。