水下环境分析系统
列举四项影响自由潜的因素

影响自由潜的因素自由潜是指在水下进行的潜水活动,它给人们带来了探索海洋世界的机会和乐趣。
然而,自由潜并非完全没有限制,有许多因素会对自由潜的进行产生影响。
本文将列举并分析四个主要影响自由潜的因素。
1. 水下环境条件水下环境条件是影响自由潜的重要因素之一。
首先是水温,水温过低或过高都会对人体产生不利影响,如导致体温过低或过高、血管收缩或扩张等问题。
其次是水质和能见度,如果水质较差或能见度很低,会给自由潜带来安全隐患和观赏体验受限的问题。
此外,还有水流、海浪等自然现象也会对自由潜造成一定程度上的影响。
2. 身体条件和健康状况身体条件和健康状况是决定一个人是否适合进行自由潜的重要因素之一。
首先需要考虑的是个人身体状况,包括心血管系统、呼吸系统、耳鼻喉等方面的健康情况。
如果存在严重的心脏病、呼吸道疾病或耳鼻喉问题,都会增加潜水中发生意外的风险。
其次是个人的体能状况,自由潜需要一定的体力和耐力,如果身体素质较差,可能无法适应长时间在水下活动。
3. 技术水平和经验技术水平和经验是影响自由潜安全性和乐趣的重要因素之一。
首先是潜水技术的掌握程度,包括呼吸控制、下潜和上浮技巧、平衡技术等。
只有掌握了这些基本技能,才能更好地进行自由潜。
其次是对于不同环境和条件下的反应能力和处理能力,只有通过实践积累经验,才能更好地应对突发状况并保证自身安全。
4. 心理因素心理因素也是影响自由潜一个重要因素。
首先是对风险的认识和接受程度,不同人对于风险的认知和接受程度不同,这会影响他们在潜水中的行为和决策。
其次是心理素质和情绪状态,自由潜需要保持冷静、放松的心态,如果存在焦虑、恐惧或压力等问题,可能会影响潜水体验和安全性。
总结起来,影响自由潜的因素主要包括水下环境条件、身体条件和健康状况、技术水平和经验以及心理因素。
了解并充分考虑这些因素,可以帮助人们更好地进行自由潜活动,并确保其安全与乐趣。
bluerov硬件方案
bluerov硬件方案Bluerov是一种先进的水下机器人系统,具备广泛的应用潜力。
本文将详细介绍Bluerov的硬件方案,包括其主要组成部分和技术特点。
一、硬件组成1. 船体结构Bluerov的船体采用高强度材料制造,保证了其在水下环境下的稳定性和耐用性。
船体内部配置了重要的电子设备和传感器,以实现多功能操作。
2. 推进系统Bluerov配备了先进的推进系统,包括多个水下推进器和螺旋桨,以确保机器人在水下的灵活性和高效性。
推进系统能够根据需要自由调节方向和速度,并具备良好的防水性能。
3. 电力系统Bluerov使用可靠的电力系统供应,包括高性能的电池和充电管理控制器。
电池容量足够支持长时间的工作任务,并且可以通过外部电源进行快速充电。
4. 摄像装备Bluerov配备了高清摄像装备,包括多个摄像头和视频传输系统。
这些装备可以提供清晰的图像和视频数据,帮助操作人员进行实时监控和分析。
5. 传感器系统Bluerov装备了多种传感器,包括深度传感器、温度传感器、压力传感器等。
这些传感器可以实时采集和传输水下环境的相关数据,为后续分析和决策提供支持。
二、技术特点1. 高可靠性Bluerov的硬件方案经过精心设计和测试,确保其在水下环境下的高可靠性和稳定性。
各个组件采用优质材料制造,具备良好的防水性能和耐用性,可以适应各种复杂的水下任务。
2. 多功能性Bluerov具备多种功能,包括水下勘探、水下作业、科学研究等。
其强大的硬件系统可以满足各种不同任务的需求,并支持灵活的操作和控制。
3. 可扩展性Bluerov的硬件方案具有良好的可扩展性,可以根据具体需求进行定制和升级。
用户可以根据自身的实际情况,选择适合的传感器和装备进行配置,以满足不同任务的需求。
4. 先进的控制系统Bluerov的硬件方案配备了先进的控制系统,包括多轴控制器和稳定传感器。
这些系统可以实现精确的运动控制和稳定性控制,提高机器人在水下的操作性能和工作效率。
水下定位系统(USBL)

THANKS
感谢观看
和应用。
数据传输
通过有线或无线方式将定位数据 实时传输到上位机或控制中心,
实现远程监控和管理。
数据接口
提供标准的数据接口,方便与其 他系统进行集成和数据共享。
04
USBL系统性能指标评价方法
定位精度指标分析
均方根误差(RMSE)
衡量定位精度的常用指标,计算预测位置与实际位置之间的欧氏距离的平均值。
USBL定位算法
到达时间差(TDOA)定位算法
通过测量声波到达不同接收阵元的时间差,结合阵列的几何关系和声速信息,解算出目标 的位置。
到达角度(AOA)定位算法
利用阵列信号处理技术估计出声波到达阵列的方位角和俯仰角,进而确定目标的位置。
联合TDOA和AOA定位算法
同时利用TDOA和AOA信息,构建联合定位方程组,提高定位精度和稳定性。
深度学习算法应用
通过深度学习算法对传感器数据进行处理和分析 ,提高水下定位系统的智能化水平。
新型水声通信技术
采用高速、高效的水声通信技术,实现水下定位 系统与水面支持设备之间的实时数据传输。
智能化、自主化发展趋势
自主导航技术
结合惯性导航、地形匹配等自主导航技术,提高水下定位系统的 自主性和适应性。
最大正负差(Max/Min Error)
表示定位结果中最大正偏差和最大负偏差,用于评估系统的极端误差情况。
圆概率误差(CEP)
以50%的概率落在以真实位置为圆心、半径为CEP的圆内的定位误差。
稳定性指标评估
01
重复定位精度
在相同条件下,多次定位结果的 一致性程度,反映系统的稳定性 。
漂移误差
02
03
水下定位系统(USBL)
水下声纳探测和识别系统的设计与性能优化
水下声纳探测和识别系统的设计与性能优化水下声纳探测和识别系统的设计与性能优化概述水下声纳探测和识别系统是一种利用声波在水中传播的特性,对水下目标进行探测和识别的技术手段。
由于水下环境的特殊性,声波在水中的传播具有很强的穿透力和远距离传输能力。
因此,水下声纳系统被广泛应用于海洋科学研究、海洋资源开发利用、水下声学监测、军事侦察等领域。
本文将对水下声纳探测和识别系统的设计与性能优化进行详细介绍。
一、水下声纳系统的组成和原理水下声纳系统由发射器、接收器和信号处理系统三部分构成。
发射器通过产生特定频率的声波信号,将其发送到水中;接收器将从水中接收到的声波信号转化为电信号;信号处理系统对电信号进行处理和分析,实现水下目标的探测和识别。
水下声纳系统的原理在于声波在水中的传播和相互作用。
声波在水中传播的速度和路径受到水的温度、盐度、压力等环境因素的影响。
并且,不同频率的声波信号在水中的传播特性也有所不同。
利用这些特性,可以通过对水中的声波信号进行分析,获取关于水下目标的信息。
二、水下声纳系统的设计要点1.频率选择:频率的选择对水下声纳系统的性能具有重要影响。
低频声波能够在水中传播较远,但分辨率较低;高频声波能够提高分辨率,但传播距离较短。
因此,根据实际需求选择合适的频率范围。
2.发射器和接收器的布置:发射器和接收器的布置是影响水下声纳系统性能的关键因素。
合理布置发射器和接收器,能够提高声纳系统的方向性和抗干扰能力。
常用的布置方式包括单向发射单向接收、扇形发射扇形接收、相控阵等。
3.背景噪声的处理:水下环境中存在着各种背景噪声,如水流噪声、海洋生物噪声等。
这些背景噪声会干扰到声纳系统的探测和识别能力。
因此,需要采取合理的方法对背景噪声进行处理,如滤波、降噪算法等。
4.信号处理算法:信号处理算法是水下声纳系统性能优化的关键。
常用的信号处理算法包括自相关法、互相关法、最小二乘法、最大似然法等。
有效的信号处理算法能够提高系统的探测和识别能力。
大数据技术在水生态环境工程分析中的应用
大数据技术在水生态环境工程分析中的应用摘要:全面融合大数据技术的水生态环境保护工作是城市生态环境生态文明建设的重要方向,在现代社会不断发展过程中,人们对于环保越来越重视,而且科学技术不断地突破,通过大数据技术的应用,能够对运行过程中所存在的漏洞进行研究,提高环境保护整体质量。
关键词:大数据技术;水生态环境;应用引言国家的经济的快速发展为生态环境留下极为严重的隐患。
国家发展过程中每个阶段的目标都不同,在经济复苏阶段,为提高国民经济适当做出放弃是不得已而为之,但随着我国经济的快速发展、生态环境的岌岌可危,对生态环境的保护已经迫在眉睫。
在水生态环境分析工作中应用大数据技术能够极大的提升工作效率,较传统的水生态数据收集和分析工作流程,大数据技术能够节省工作中人力、物力的投入,确保数据收集和分析的准确性,达到提质增效的目的。
1大数据技术在水生态环境工程的概述大数据技术是继物联网和云计算之后信息技术产业又一次重要的技术变革,该技术对于处理多源海量数据集群,具有很大的技术优势。
利用大数据分析工具对水环境数据进行处理和分析,可以有效发现水环境污染来源,预测污染物扩散发展情况,通过地图展示、报表呈现等方式将数据进行可视化,有利于帮助环境监管部门及时了解水环境状况,实现精准监管和快速响应。
大数据分析的核心是数据挖掘,基于不同的数据类型和格式,各种数据挖掘算法可以更加科学地呈现出数据本身客观规律的特点,大数据分析的基本思路是通过分析每一条数据,进而从大量数据中寻找其规律。
基于大数据技术,结合生态环境监管的需求,水环境保护监管系统需要实现水环境状况综合研判、水环境风险预测预警、水环境污染追因溯源、水质改善政策成效评估4大核心功能,这就要求数据挖掘应具有多模型的整合能力和快速响应能力,支持图形化界面、菜单驱动、拖拉式操作,挖掘结果能够转化为专题图表。
在分析方法上,数据挖掘工具可以分为预测型和描述型,其中,预测型主要包含回归分析、时间序列分析、决策树等方法,描述型主要包含聚类分析、关联分析等方法。
水下设备自测环境参数实时分析软件

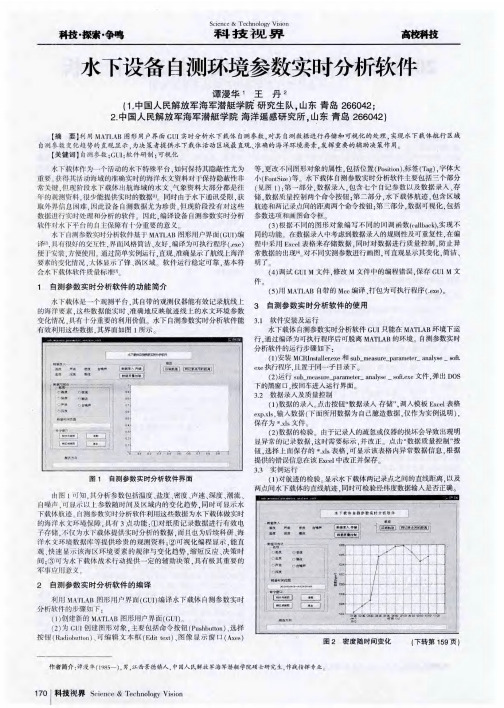
水下设备自测环境参数实时分析软件【摘要】利用MATLAB图形用户界面GUI实时分析水下载体自测参数,对其自测数据进行存储和可视化的处理,实现水下载体航行区域自测参数变化趋势的直观显示,为决策者提供水下载体活动区域最直观、准确的海洋环境要素,发挥重要的辅助决策作用。
【关键词】自测参数;GUI;软件研制;可视化水下载体作为一个活动的水下特殊平台,如何保持其隐蔽性尤为重要。
获得其活动海域的准确实时的海洋水文资料对于保持隐蔽性非常关键,但现阶段水下载体出航海域的水文、气象资料大部分都是往年的观测资料,很少能提供实时的数据[1]。
同时由于水下通讯受限,获取外界信息困难,因此设备自测数据尤为珍贵,但现阶段没有对这些数据进行实时处理和分析的软件。
因此,编译设备自测参数实时分析软件对水下平台的自主保障有十分重要的意义。
水下自测参数实时分析软件基于MATLAB 图形用户界面(GUI)编译[2],具有很好的交互性,界面风格简洁、友好,编译为可执行程序(.exe)便于安装,方便使用。
通过简单实例运行,直观、准确显示了航线上海洋要素的变化情况,大体显示了锋、涡区域。
软件运行稳定可靠,基本符合水下载体软件质量标准[3]。
1 自测参数实时分析软件的功能简介水下载体是一个观测平台,其自带的观测仪器能有效记录航线上的海洋要素,这些数据能实时、准确地反映航迹线上的水文环境参数变化情况,具有十分重要的利用价值。
水下自测参数实时分析软件能有效利用这些数据,其界面如图1所示。
图1 自测参数实时分析软件界面由图1可知,其分析参数包括温度、盐度、密度、声速、深度、潮流、自噪声,可显示以上参数随时间及区域内的变化趋势,同时可显示水下载体航迹。
自测参数实时分析软件利用这些数据为水下载体做实时的海洋水文环境保障,具有3点功能:①对纸质记录数据进行有效电子存储,不仅为水下载体提供实时分析的数据,而且也为后续科研、海洋水文环境数据库等提供珍贵的观测资料;②可视化编程显示,能直观、快速显示该海区环境要素的规律与变化趋势,缩短反应、决策时间;③可为水下载体战术行动提供一定的辅助决策,具有极其重要的军事应用意义。
海洋环境调查报告

海洋环境调查报告一、引言海洋环境是地球上极为重要的生态系统之一,对人类和地球生态平衡具有重要作用。
本报告旨在对某海域的环境情况进行调查和分析,为保护海洋环境提供科学依据。
二、调查地点本次调查地点为某某海域,该海域位于XX度北纬,XX度东经,属于某某国家的领海范围。
三、调查内容及方法1. 海水质量调查:对水质进行采样并进行化验分析,包括水体的PH值、COD、氨氮、硝态氮等关键指标;2. 海底底质调查:采集海底沉积物样品,进行颗粒度分析和微生物含量检测;3. 海洋生物调查:通过水下摄像机和捕捞工具对海洋生物进行观察和记录,对鱼类、贝类、海草等进行种类和数量统计;4. 海洋垃圾调查:对海域内的垃圾进行清点和分类,了解海洋垃圾来源和分布情况。
四、调查结果1. 海水质量:调查结果显示,该海域水质总体较好,PH值在7.8-8.2之间,COD、氨氮、硝态氮等指标均处于国家限定标准范围内;2. 海底底质:海底底质颗粒度均匀,微生物含量适中,生态环境相对稳定;3. 海洋生物:该海域生物种类繁多,包括适应海水环境的各类鱼类和贝类,以及一定数量的海草,表明海洋生物多样性丰富;4. 海洋垃圾:海域内发现大量塑料垃圾和金属垃圾,尤其是塑料垃圾对海洋生物造成潜在威胁。
五、调查结论1. 该海域海水质量较好,生物多样性丰富,但存在海洋垃圾污染问题;2. 建议加强海洋环境保护力度,限制塑料制品的使用和排放,加强海洋垃圾清理工作,保护海洋生态系统的健康。
六、致谢在本次调查过程中,感谢相关部门和同事的大力支持和协助,使得调查工作得以顺利完成。
七、参考文献1. XX. XXXX. 海洋环境调查技术指南. 海洋出版社, 20XX;2. XXXX, XXXX. 海洋生态学导论. 科学出版社, 20XX.(以上为海洋环境调查报告的内容,仅供参考)。
基于物联网技术的水产养殖环境监控系统

基于物联网技术的水产养殖环境监控系统针对人手不足,饲养控制模糊等突出的问题,最大限度的提高水产品的质量存活率,和养殖户的收益,在水产养殖加入更多的科技元素,我们开发一种基于物联网技术的智能水产养殖环境监测系统,该系统由传感器节点、协调器节点、WIFI、服务器以及监测后台组成,具有良好的使用价值与推广价值。
标签:水产养殖;zigbee;物联网;传感器网络智能水产养殖最终是希望能够为一线的渔户提供一个简单、直观、高效的监测和管理系统,系统核心目标在于对鱼塘中与鱼类生长密切相关的环境参数进行实时监测,当终端设备监测到鱼塘的环境参数偏离了鱼类的最佳生长要素时,可以通过终端设备可下达控制命令,自动打开或关闭相应的环境调节,从而使水产养殖环境参数恢复正常,达到增加产量和提高经济效益的目的,从而实现水产养殖的信息化。
1 水产养殖终端的设计与实现基于模块化的设计思想,水产养殖监控终端的设计分为五个部分,第一模块是传感器节点,使用温度、浑浊度、PH、水位等传感器来采集鱼塘环境中的数据;第二部分是协调器节点,使用Arduino UNO单片机作为监测终端的处理器,接收并处理数据;第三部分是WIFI,使用WIFI模块与服务器进行数据的发送和接收;第四部分是服务器部分,负责执行管理者的调节指令。
第五部分是监测后台,负责对主控cpu采集到的数据进行处理并显示在移动端[1]。
2 水产养殖设备的特点水产养殖环境的关键参数中有水中的温度、水位的高度、水中的PH值、水中的浊度大小等,而这些信息我们用手也摸不到,眼睛也看不到,只有通过无线传感器技术,将这些数据进行收集,所以需要通过物联网和人工智能技术应用到养殖的环境中去是很有必要的。
本系统的设计主要是监测水产养殖的环境的变化状态,同时控制环境的变化,使其适合水产品的生长。
而水产养殖的养殖环境的面积是很大的。
所以采用了无线传输网络的方式,在传感器节点采集环境的参数时通过ZigBee无线传感器网络自动组网进行传递到这个网络的“协调器”中,在通过串口WI-FI技术将数据传输到云服务器,在远程使用监测中心时就可以通过云服务器读取到数据,養殖人员便可以及时的实时的对养殖环境进行监控、调节水产养殖的各个环境的参数变量,可以大大的减少了养殖者的人力精力的投入,并可以对采集的历史数据进行分析,有效的预防可能会发生的各种病情,从而实现了成本低廉,收入高的优点[2]。
海洋环境监测技术及其应用
海洋环境监测技术及其应用海洋是人类重要的生存资源之一,随着科技的发展,人们对海洋环境监测的需求越来越大。
海洋环境监测技术逐渐成熟,广泛应用于海洋发展、资源利用和保护等领域。
本文将介绍海洋环境监测技术的现状和应用。
一、海洋环境监测技术的发展随着海洋开发和利用的程度日益加深,海洋环境监测技术的研究也日渐成熟。
海洋环境中包括海水、海底、海陆交界面等多个方面,针对不同的环境,需要采用不同的监测技术。
1、海洋生物监测技术海洋生物是海洋生态系统的重要组成部分,其生命活动有助于维护海洋环境的平衡和稳定。
海洋生物监测技术包括生物多样性监测,海洋生态系统监测和海洋污染监测等多个方面。
例如,通过水下无人机、声纳图像和潜水器等技术可以对海底生物进行监测,对海洋生态系统的稳定性和演化趋势进行预测。
2、海洋化学监测技术海洋化学是海洋环境的核心参数之一,包括水温、盐度、水中营养物、氧化还原电位等。
海洋化学监测技术通过采集海水、沉积物、生物组织等样品,对这些核心参数进行分析和检测。
通过实时监测海洋化学参数的变化,可以预测海洋的发生变化,并对其进行有效管理和治理。
3、海洋物理监测技术海洋物理监测技术主要用于监测水流、波浪、海洋温度和海平面等参数。
例如,全球定位系统(GPS)、气象卫星、海洋浮标等技术能够实时监测海洋水流和海洋漂浮物的运动轨迹,在海上进行救援、油气勘察、海上气象预报等方面起到重要作用。
二、海洋环境监测技术的应用随着海洋环境监测技术的不断发展和应用,其在海洋资源开发和环境保护方面也发挥着重要的作用。
1、海洋资源开发海洋资源是人类生存和发展不可或缺的资源之一,包括油气、盐、渔业、海洋药物等。
海洋环境监测技术可以选择开发海洋资源的区域和时间,确保资源利用的可持续性,同时也可以监测海洋污染情况,预防环境污染。
2、海洋环境保护海洋环境的污染问题已经引发国际社会广泛的关注。
海洋环境监测技术可以对海洋环境中的污染物进行实时监测,同时也能够对污染物进行分析和处理。
海洋环境监测与评估
海洋环境监测与评估海洋环境是地球上最为广阔的生态系统之一,对维护全球生态平衡和人类社会发展具有重要作用。
为了保护海洋环境,海洋环境监测与评估显得尤为重要。
本文将介绍海洋环境监测与评估的意义、方法和技术,以及未来发展的趋势。
一、海洋环境监测的意义海洋环境监测是指对海洋环境中的水体、生物、岩石和沉积物等要素进行定量观测和数据收集的工作。
海洋环境监测的意义主要体现在以下几个方面:1. 保护生态环境:通过对海洋环境的监测,可以及时了解海洋生态系统的状态,发现并预防各种潜在的环境问题,从而保护和恢复生态环境的稳定。
2. 保护生物多样性:海洋生物多样性对于维持海洋生态平衡至关重要。
通过监测海洋环境,可以及时采取措施保护重要的物种和生态系统,减少生物多样性的丧失。
3. 资源管理和利用:海洋是重要的经济资源领域,监测海洋环境可以为合理管理和利用海洋资源提供科学依据,避免资源过度开发和污染。
二、海洋环境监测的方法和技术海洋环境监测需要综合运用多种方法和技术,包括传统观测方法和现代化技术手段。
1. 传统观测方法:传统观测方法包括采样、实地观察和数据记录等。
例如,通过收集水体和沉积物样品,可以分析其中的物理、化学和生物指标,评估海洋环境的污染程度和生态状况。
2. 现代化技术手段:随着科技的进步,现代化技术手段在海洋环境监测中得到广泛应用。
例如,遥感技术可以通过卫星观测获取大范围的海洋环境数据,包括海洋表面温度、叶绿素浓度和海洋水文特征等。
同时,无人船、潜水器和遥控水下机器人等设备的使用也为深海环境的监测提供了便利。
三、海洋环境评估的方法和技术海洋环境评估是指对海洋环境质量和生态系统健康状态的全面评价。
根据评估目的和需要,可以采用不同的方法和技术。
1. 生物指标评估:通过确定特定生物群体的结构和功能状态,可以评估海洋环境对生物的适宜性和影响程度。
例如,通过对浮游生物种类和数量的监测,可以评估水域的富营养化程度。
2. 化学指标评估:通过对水体和沉积物中的化学成分进行分析,可以评估海洋环境中的污染程度和污染物的来源。
水下设备自测环境参数实时分析软件
科 技 视 界
动量较小的技巧性体育 项 目 但是 羽毛球 和走跑运动都纳入 了男生和 女生喜爱 的项 目之一 . 因为羽毛球运动近年来在学校掀起 了一 阵运 动 高潮 . 以其独特 的魅 力受到 了众 多学 生的青睐 : 而跑步则能增 强心肺 功能 . 是各项体育运动 的基本素质 . 并且简便易行 . 所 以也成 为了大家 的常选项 目 之一 男生喜欢项 目 基本都是球类 . 可能是 因为球 类是一
习 惯, 丰富校园体育文化生活, 建立 健康的 生活方式。 ●
,
【 参考文献 】
[ 1 ] 陈济川 . 浅 论学校 实施 闲暇体育教 育的价值 与策略 l J I - 沈 阳体 育学 院学 报
2 0 0 4 ( 4 ) : 5 4 2 - 5 4 3 . [ 2 ] 冯守玲, 杨 学 良. 关 于普 通 高校课 余 体育 的 思考 [ J J _ 河北 体 育学 院 学报 2 0 0 2 , 6 ( 1 6 ) : 4 1 — 4 2 .
表 5 余 暇 体 育 活 动 的 主 要 影 响 因素
排序 1 2
3
学更趋于实效性 3 . 2 . 4 加强余暇体育活动的组 织与管理 , 培养学 生锻炼的兴趣与习惯 学校应采取一系列措施 . 充分发挥学生各种体育组织 的作用 , 有 目的、 有计划 、 有组织地开展余暇体 育活动 。尤其要面 向全校学 生开展丰富 多彩 、 小 型多样 的体育活动 和比赛 . 培养学生参 加体育锻炼 的兴趣 与
科技・ 探索・ 争鸣
3 结 论 与 建 议
3 . 1 结 论
3 . 1 . 1 吉首大学 . 对余暇体育 的认识 有一定 的了解 . 学生参加体育锻 炼 的意识还是 比较乐 观的. 这与场地和生活环境也有一定的关 系。 3 . 1 . 2 女生 的参 与程度与男生存在 一定差异 , 同时 . 在体育项 目上男 项竞技性项目, 能提高神经中枢和灵活性, 适合青少年特点。 随着女生 生选择的项 目多为对抗性较强 的项 目等 . 而女生选择 的项 目多为运动 审美观念 的提高 , 大部分女生都喜欢去健身房去跳健美操。 量较小的项 目. 且具有很高审美价值的技巧性项 目。 表 4 学生余暇体育活动项 目的选择 3 . 1 . 3 场地设施 以及 个人对体育 的兴趣 爱好成为学生参 与余暇体育 项目 男生 百分率 女 生 百分率 活动的主要因素之一 。 所 以, 在体育课教学 中, 要注重培养学生 的体育 走跑运动 5 3 1 9 . 9 2 % 4 7 4 1 . 2 3 % 兴趣和能力 . 并加 强体育场地设施 的建设与开发。 篮球 l 6 3 6 1 . 2 8 % 2 7 2 3 . 6 8 % 3 . 2 建 议 3 . 2 . 1 创建体育教学与余暇体育一体 化教学模式 。 为实 现体育课程 目 足球 4 3 1 6 . 1 7 % O O % 标. 学校应树立课 内外一 体化的观念 . 在 高校体育课程设 置上要符合 排球 2 2 8 . 2 7 % ‘ 1 7 1 4 . 9 1 % 学生的兴趣 . 采取切 实措 施 . 为学生课余 体育活动营造 良好的体育环 健美操 1 1 4 . 1 4 % 4 7 4 1 . 2 3 % 境; 使学生能够在上课过程中掌握体育锻炼 的方法 、 手段 , 在余暇体育 武术 2 2 8 . 2 7 % 3 2 . 6 3 % 活动中得 到充分 的练习与运用 3 . 2 . 2 加大投入 . 创造 良好的体育锻炼环境 。充 分利用学生参与余暇 轮滑 l 7 6 - 3 9 % 5 4 - 3 8 % 体 育的正确动机 . 建立各项体育协会 f 如篮球 协会 、 羽 毛球协会 、 舞蹈 乒乓球 3 1 l 1 . 6 5 % 1 0 8 . 7 7 % 协 会等) . 积极扶持和指导学生体育活动 和学 生社团的工作 , 以 由学生 羽毛球 1 2 2 4 5 . 8 6 % 4 3 3 7 . 7 2 % 组织、 教师辅助的形式开 展各种体育活动 与竞 赛 . 丰富校 园体 育锻炼 跳绳 O O 1 3 1 1 ・ 4 0 % 环境 。 3 . 2 . 3 建立人性化的体育教学模 式. 提高学 生的体 育兴趣借鉴先进的 爬山 4 l 1 5 . 4 1 % 3 0 2 6 - 3 2 % 教 学模 式 . 推动学校体育教 学内容和形式改革 的步伐 , 使学校 体育教
机器人水下作业监测系统设计及实现

机器人水下作业监测系统设计及实现一、引言机器人技术的发展已经深入到各个领域,其中水下机器人因其适应各种水面条件和水下深度而用于海底勘探、污水处理、水下修复和水下探索等领域。
随着水下机器人应用范围的拓展,水下机器人水下作业监测系统的设计和实现变得尤为重要。
本文以一款水下机器人为例,阐述机器人水下作业监测系统在设计和实现过程中需要注意的问题和解决方案。
二、机器人水下作业的要求水下机器人的水下作业主要分为两类,一种是接收指令直接控制,另一种是预设方案后自主作业。
无论是那种类型,水下作业的要求都是一致的。
水下机器人要能够承受高压、软泥、强流和高深度等水下作业的复杂环境。
在完成水下作业时,需要机器人对环境进行探测和监控,以确保机器人和作业的安全。
此外,机器人在水下作业时还应有良好的续航能力和灵活的动作控制。
三、水下机器人监测系统的设计机器人水下作业监测系统设计必须結合实际情况,包括监测系统的传感器、数据收集和数据分析处理等方面。
传感器方面,监测系统首先应选择适合水下作业的传感器。
当前市场上的水下传感器主要包括距离传感器、摄像头、水温传感器、水压传感器和加速度传感器。
数据收集和分析方面,监测系统应使用高度可靠的数据收集设备,包括水下信号搜集、数据传输和数据存储,以确保水下数据的实时性、准确性和完整性。
数据分析要素包括:数值分析、模型分析、波振谐分析及预测分析。
四、实现方案机器人水下作业监测系统实现在硬件和软件两个方面。
硬件方面,可选用气密的的机器人结构,防止海水进入到机器人内部并损害内部电路。
在传感器方面要选择高压、低温、深海适用的设备,以保证水下数据的准确性和有效性。
软件方面,机器人水下作业监测系统主要应用于数据分析和控制系统两方面。
免费公开的数据分析工具和计算机软件可以用以进行数据分析和处理。
而控制软件应该是自主研发,具有反计算能力、实时控制等功能。
为了确保甚至恢复遗失机器人的数据、避免重复次数,机器人控制软件应并装备於带存储空间的内部设备当中。
水环境保护与治理措施系统性分析

水环境保护与治理措施系统性分析摘要:近年来,国家和地方大力推进生态文明建设,加大水资源和水环境保护力度,水环境状况总体趋好。
随着经济社会快速发展,水资源的开发与保护的矛盾仍然突出,水环境问题亟待解决。
采用科学合理的水环境保护和治理对策和措施,确保水环境治理工作取得成效。
关键词:水环境、水污染防治、水生态修复、保护与治理措施水作为人类赖以生存的重要资源,人类的生活及农业、工业生产都离不开水资源的支持。
水环境受到破坏和污染,会导致人类正常生活、生产陷于困境。
积极推进水环境保护和治理工作,可以有效提高水环境整体质量。
通过识别水环境污染的主要问题,对水环境质量的影响因素进行深入探究,结合水环境保护技术措施现状,提出具体解决策略,明确科学合理的保护治理措施,保证水环境质量得到全面提升。
本文主要从系统性角度出发,从水资源保护、水污染防治、水生态修复三个方面分析水环境保护治理措施。
1 水资源保护措施1.1确定保护范围对水资源的实际分布情况进行仔细调查,明确水资源具体保护区,有效减少人为因素对水生态环境造成的干扰。
保障水系形态完整,禁止违法违规侵占水体等建设和生产活动,有效保障水系安全。
特别是对饮用水源地加强保护,划定水源保护区地理界线,并在水源保护区设置标志牌、警示牌、界碑、界桩等。
1.2建立水源地监测预警系统及应急能力建设由具有水质监测资质的单位负责实时监控水源地水质变化,并对其进行长期水质动态观测,对饮用水水源实施监控是进行饮用水水源动态管理的重要手段。
要实现水质监测预警系统在水源地的应用,就必须要完善水源地的水质监测体系,建立合理的水质监测网。
首先,要合理设置监控项目。
依据《地表水和污水监测技术规范》、《地表水环境质量标准》等标准和规范要求,同时结合饮用水水源地的自然条件以及人为污染状况,选定相关指标作为重点监控项目。
其次,要根据监控项目的不同科学设置监控频次。
对于地表水型水源地,一般每月监测一次。
在对水源地地表水水质实时监控的同时,还应加强水源地水质监测实验室的检测能力。
声纳技术海底探测的原理

声纳技术海底探测的原理声纳技术是一种利用声波在水中传播的特性进行海底探测的技术。
通过声纳技术,可以实现对海底地形、海底生物、海底沉积物等信息的获取,为海洋资源开发、海洋科学研究以及海洋环境监测提供重要支持。
本文将介绍声纳技术海底探测的原理及其应用。
一、声纳技术的基本原理声纳技术是利用声波在水中传播的原理进行海底探测的一种技术。
声波是一种机械波,它在水中传播时会受到水的密度、压力、温度等因素的影响,从而形成声速的变化。
声速随水温、盐度、压力等因素的变化而变化,这种变化对声波的传播具有重要影响。
声纳系统通常由发射器和接收器组成。
发射器会发出声波信号,这些声波信号在水中传播并与海底或水下目标相互作用后,一部分被接收器接收。
通过分析接收到的声波信号,可以获取海底地形、水下目标等信息。
二、声纳技术海底探测的原理1. 声波的传播声纳技术利用声波在水中传播的原理进行海底探测。
声波在水中传播时,会受到水的密度、压力、温度等因素的影响,从而形成声速的变化。
声速的变化会导致声波的传播路径发生弯曲,这种弯曲会受到海底地形等因素的影响而发生变化。
2. 声波与海底的相互作用当声波遇到海底时,会发生反射、折射、散射等现象。
这些现象会导致声波的传播路径发生变化,从而可以获取海底地形、水下目标等信息。
通过分析声波的反射、折射、散射等特性,可以确定海底的硬度、形状、结构等信息。
3. 声纳系统的工作原理声纳系统通常由发射器和接收器组成。
发射器会发出声波信号,这些声波信号在水中传播并与海底或水下目标相互作用后,一部分被接收器接收。
接收器会将接收到的声波信号转化为电信号,并传输给处理系统进行分析。
处理系统会对接收到的声波信号进行处理,提取其中包含的海底地形、水下目标等信息。
通过分析声波信号的强度、频率、相位等特性,可以获取海底地形的高程、水下目标的位置、形状等信息。
三、声纳技术海底探测的应用声纳技术在海底探测领域有着广泛的应用。
以下是声纳技术在海底探测中的一些应用:1. 海底地形测绘:声纳技术可以用于获取海底地形的高程、坡度、形状等信息,为海洋地质勘探、海底管道铺设等提供重要数据支持。
基于声呐技术的海洋生态环境监测系统研究

基于声呐技术的海洋生态环境监测系统研究海洋是地球上最神秘、最浩瀚、最深邃的领域之一,而海洋生态环境的监测是保障海洋生态系统健康和生物多样性的重要措施之一。
近年来,基于声呐技术的海洋生态环境监测系统得到了越来越多的关注和应用。
声呐技术主要是利用声波的特性,在水下进行环境探测和水下目标监测。
下面就让我们一起来了解声呐技术在海洋生态环境监测中的应用及其研究进展。
一、声呐技术在海洋生态环境监测中的应用声呐技术在海洋生态环境监测中被广泛应用,主要体现在以下几个方面。
1. 海洋生态系统的物理监测声呐技术可以测量水下物理量,如水温、盐度等,帮助了解海水的运动、混合以及生态系统内部环境的变化,从而了解生态系统运行的动态特征。
2. 海洋生态系统的生物监测声呐技术可以探测海洋生物的移动、分布和生态活动,如鱼群、鲸群、海豚、海龟等,通过探测物种的分布、密度和行为习性,了解生境变化影响的程度,进而评估和预测生命周期和生物多样性动态。
3. 海洋研究和探索声呐技术可以提供海底地形的图像或三维模型,帮助进行海洋地质和地形的研究和探索。
二、基于声呐技术的海洋生态环境监测系统研究基于声呐技术的海洋生态环境监测系统主要包括硬件设备和数据处理两个部分。
1. 硬件设备硬件设备是基于声呐技术的海洋生态环境监测系统的核心组成部分。
根据监测目标和环境的不同,硬件设备的类型和设置方式会有所不同。
如何选择合适的硬件设备和布设方式,将直接影响到监测结果的准确性和监测成本的高低。
2. 数据处理声呐监测得到的数据一般是声呐信号,需要经过预处理和分析,才能得到有用的生物和环境信息,所以数据处理也是基于声呐技术的海洋生态环境监测系统中重要的组成部分。
基于声呐技术的海洋生态环境监测系统有很大的发展空间,这在很大程度上得益于技术的不断进步。
目前,随着计算机计算能力的不断提升以及机器学习技术的发展,大量的数据可以通过人工智能技术来分析和挖掘,从而更好地了解海洋中生态系统的运行规律。
基于水声通信的智能水下信息采集系统设计

基于水声通信的智能水下信息采集系统设计智能水下信息采集系统是一种利用现代科技手段,通过水声通信技术实现的智能化水下数据采集及传输系统。
它通过水声信号传输数据、控制设备等,实现对水下环境中各种物理、化学、生物等信息的采集、监测和分析。
在海洋资源开发、环境监测、海底地质勘探等领域具有广阔的应用前景。
智能水下信息采集系统的设计涉及到硬件设计和软件设计两个方面。
硬件设计方面,系统需组成一个完整的水下信息采集设备。
首先,传感器是系统的核心之一。
传感器的选择应根据采集数据的类型和深度需求来确定,例如温度传感器、压力传感器、光电传感器等。
其次,需要设计一个能耐受水下环境的机械结构,确保设备能在水下长时间稳定工作。
此外,电源系统也是设计过程中需要考虑的重要因素,可以选择使用太阳能电池板、蓄电池、氢燃料电池等供电方式。
最后,在硬件设计中,还需要考虑通信模块的设计,以便与地面的控制中心进行数据传输与通信。
软件设计方面,系统需要开发一套完整的数据采集、传输和处理的软件平台。
首先,需要开发相应的水声通信协议,确保数据能够可靠地通过水声信号进行传输。
其次,需要设计一个用户友好的界面,使得用户能够方便地对系统进行控制和监测。
同时,还需要设计数据采集与处理算法,以满足对各种水下信息的精确采集与分析需求。
此外,还需要设计数据存储与管理系统,确保采集到的数据能够被及时地存储和管理。
最后,在软件设计中也需要考虑系统的安全性,例如数据加密、用户认证等。
综合来看,基于水声通信的智能水下信息采集系统设计需要考虑航行能力、数据采集能力、通信能力和能源管理四个方面。
航行能力包括系统的机械结构设计和水动力学性能优化;数据采集能力包括各种传感器的选择与布置;通信能力包括水声通信协议的设计和优化;能源管理包括系统的电源供应和能耗管理。
此外,设计这样一个智能水下信息采集系统还需要关注以下问题:首先,系统的稳定性与可靠性是保证系统长时间工作的关键。
水下环境复杂且恶劣,系统设计需要考虑各种不确定因素和突发情况,确保系统的稳定工作;其次,系统的可扩展性和升级性也需要考虑到。
水下环境调查工作计划

水下环境调查工作计划一、背景介绍水下环境调查是一项重要的工作,它可以帮助我们了解水下生态系统的状况、水质污染程度以及水下资源的分布情况。
本文档旨在制定水下环境调查工作计划,以保障调查工作的高效运作,确保数据的准确性和可靠性。
二、调查目的1.了解水下生态系统的健康状况;2.评估水质污染程度及其对生态环境的影响;3.调查水下资源的分布情况,为资源开发提供科学依据;4.搜集水下环境相关数据,为环境保护和管理决策提供支持。
三、调查内容和方法1.水下生态系统调查–确定调查样地:选择具有代表性的水域区域作为调查样地;–采集样本:使用水下摄像设备、潜水员等工具采集水下生态样本;–测量生态参数:记录水下生态样本的种类、数量、分布等参数;–数据分析:对采集的数据进行统计和分析,评估水下生态系统的健康状况。
2.水质调查–确定调查断面:选择具有代表性的水域断面进行水质调查;–采集水样:在不同深度和位置采集水样,包括表层水和底层水;–测量水质参数:测量水样中的温度、溶解氧、pH值、浊度等参数;–检测污染物:对水样中的重金属、有机物等污染物进行分析;–数据分析:对采集的数据进行统计和分析,评估水质污染程度及其对生态环境的影响。
3.水下资源调查–确定调查区域:选择具有潜在水下资源的区域进行调查;–采集样本:使用水下摄像设备、声纳等工具采集水下资源样本;–系统调查:记录水下资源的种类、分布范围、数量等信息;–数据分析:对采集的数据进行统计和分析,评估水下资源的分布情况。
四、调查计划1.队伍组建–组织调查团队,包括生态学家、水质专家、潜水员等;–分工合作,明确各成员的职责和任务。
2.调查准备–准备必要的调查设备和工具,包括水下摄像设备、声纳、水质监测仪器等;–制定调查路线和调查方案,确保覆盖调查区域的所有重要点位。
3.调查实施–按照预定的调查路线和方案,对目标区域进行水下生态系统、水质和水下资源的调查;–注意安全事项,确保潜水员的生命安全。
海洋环境监测体系与方法

海洋环境监测体系与方法海洋环境监测体系和方法是指用于对海洋环境进行实时、连续和定量监测的技术和方法。
海洋环境监测对于保护海洋生态环境、维护海洋资源的可持续利用以及预测和应对海洋灾害具有重要意义。
本文将介绍海洋环境监测体系和常用的监测方法。
一、海洋环境监测体系海洋环境监测体系是由监测设备、观测站点、数据传输和处理系统以及各种监测项目组成的系统。
海洋环境监测设备主要包括各种传感器和仪器,用于测量海洋水体的温度、盐度、溶解氧、浊度、光强等参数,以及海洋底质的颗粒物、有机物含量等。
观测站点是指分布在不同海域的固定观测点,通过布设在这些点上的传感器和仪器来进行实时监测。
连续、定量、实时的海洋环境监测数据通过数据传输和处理系统传输到监测中心或相关机构,进行数据处理和分析,并提供给用户。
海洋环境监测体系的合理布局对于监测海洋环境的全面与准确至关重要。
根据不同的目的和需要,可以布设观测站点在海洋中不同的位置,如近海、中海和远海区域。
观测站点的布置应该兼顾空间分布均匀性和监测点密度。
同时,观测站点的建设与运维工作也需要具备高度的可持续性。
二、常用的海洋环境监测方法1.传统采样分析法:传统采样分析法是海洋环境监测的基本方法,通过采集海洋水样或底质样品,进行实验室分析来获得环境数据。
传统采样分析法适用于对特定物质或参数进行分析的场景,如水质监测中的pH值、盐度、营养盐等参数的测定,以及海洋底质中的有机质含量等。
2.海洋遥感监测法:海洋遥感监测法利用卫星、飞机等载荷携带的遥感仪器,通过接收和处理遥感数据来获取海洋环境信息。
常用的海洋遥感监测方法包括可见光遥感、红外遥感、微波遥感等。
海洋遥感技术具有广覆盖、高时空分辨率等优势,可用于监测大范围海域的水温、叶绿素浓度、海浪高度、水色等参数的变化。
3.海洋传感网络监测法:海洋传感网络监测法是利用分布在海洋中的传感器和仪器通过互联网进行数据传输和处理,实现对海洋环境的实时监测。
饱和潜水系统中的水下贝类和有孔虫分析

饱和潜水系统中的水下贝类和有孔虫分析潜水技术在海洋科学研究和工程勘探中扮演着重要的角色。
饱和潜水系统是一种先进的技术,将潜水员置于高压环境中进行深海勘探和研究。
在这样的环境中,水下生物的存在和相互作用对于了解海洋生态系统和地质活动至关重要。
其中,贝类和有孔虫作为海洋底栖生物中的重要代表,提供了许多重要的信息和见解。
本文将分析饱和潜水系统中的水下贝类和有孔虫,并探讨它们在海洋生态学和地质学方面的应用。
首先,水下贝类在饱和潜水系统中的分析对于海洋生态学研究具有重要意义。
贝类是海洋生物多样性的重要组成部分,它们广泛分布在海洋底部的沉积物上。
通过对水下贝类的研究,我们可以了解它们的分布、生态位和生活史,以及它们与其他生物和环境之间的相互作用。
在饱和潜水系统中,观察和采集水下贝类样本可以提供重要的生物地理学和生态学数据。
例如,通过分析贝类的种类和数量,我们可以评估海洋底部生物多样性的变化和生态系统健康状况,从而为海洋保护和管理提供科学依据。
此外,从贝类的壳化物质中提取的氧同位素和碳同位素等化学标记,可以为古气候研究和环境变化研究提供重要线索。
其次,有孔虫是饱和潜水系统中另一个重要的水下生物类群。
有孔虫是一类微小的、单细胞的海洋底栖生物,生活在海洋沉积物中,并广泛分布于全球各大洋。
有孔虫具有非常高的物种多样性,且对环境变化和海洋演化相当敏感。
通过对饱和潜水系统中的有孔虫进行分析,我们可以了解它们的多样性、种群结构和地理分布。
此外,有孔虫壳体记录了海洋环境的信息,包括海洋温度、盐度和氧含量等。
通过分析有孔虫壳体中的氧同位素和碳同位素,我们可以重建过去的海洋环境变化和气候变化。
这对于了解过去数百万年来地球上的气候演化,以及预测未来气候变化的趋势具有重要的意义。
饱和潜水系统中的水下贝类和有孔虫分析在地质学研究中也起着重要作用。
贝类和有孔虫是地层沉积物中常见的化石群体,它们的存在可以帮助地质学家确定不同地层的形成时期和环境条件。
ROV水下探测系统在水利工程中的应用初探

ROV水下探测系统在水利工程中的应用初探王祥;宋子龙【摘要】水下检查是水利工程日常管理、应急抢险、大坝安全鉴定等不可或缺的技术手段. 针对水利工程中水下检查存在的困难,结合ROV系统技术优势与特点,通过ROV系统在水库大坝、水闸等水利工程中的应用实例,总结了ROV系统在水库(水闸)集中渗漏点查找、水下金属构件锈蚀检查、混凝土面板裂缝检查、消力池冲坑检查、水下构筑物声纳扫描成像等方面的应用方法和技术成果,同时对ROV的关键技术、应用难题与适用范围作了简单探讨. 为科学、高效地查明水利工程水下安全隐患提供了新的思路.%The underwater inspection is a necessary technique in daily management, emergency rescue and dam safety assess-ment of water conservancy projects. Aiming at the difficulties in the underwater detect and by combining with ROV's advantages and characteristics, through the application cases of ROV system in dams, sluices and other water conservancy projects, the ap-plication approaches and achievements of ROV in the centralized leakage detection of reservoir ( sluice) , underwater metal com-ponent corrosion detection, concrete slab crack inspection, scouring pit detection of energy dissipation pool, underwater sonar scanning and imaging for structures were summarized, and the key technique, the application difficulties and applicability range of ROV were briefly discussed. The ROV technique provides a new scientific and efficient approach for identifying underwater hidden danger of water conservancy projects.【期刊名称】《人民长江》【年(卷),期】2016(047)002【总页数】5页(P101-105)【关键词】ROV;水下检查;声纳扫描成像;水下安全隐患【作者】王祥;宋子龙【作者单位】湖南省水利水电科学研究所,湖南长沙410007;湖南省水利水电科学研究所,湖南长沙410007【正文语种】中文【中图分类】TV698我国现有水库9.8万余座,其中绝大部分为上世纪50~60年代修建的中小型水库。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、系统简介
GF588水下环境分析系统以海洋环境主要特征参数和水声模型为基础,实现对海洋地理环境、水文环境以及水声环境的综合仿真和可视化分析,从而对水下环境进行分析,为作战指挥员发现和理解战场环境规律提供有力的依据。
二、系统功能
1.系统工具栏
系统自动启动AutoCAD,并自动加载软件功能菜单,连接数据库,完成初始化工作及添加系统的工具条。
2.功能使用
2.1 数据标准化工具
基准面转换
单基准修正
单基准修正指所有水深数据水深值按照同一个修正值修正。
单基准修正设定基准面修正量后按[确定],系统自动提示选择水深数据点存储文件,选择完成后系统提示选择结果保存文件,完成修正计算后自动保存在结果文件中。
水深数据点存储在文件文件中,格式定义如下:
X Y Z
X Y Z
多基准修正
多基准修正指需要根据范围设定对水深数据点进行插值计算修正,范围设定存储在文本文件中,格式定义如下:
#修正量
X Y X Y
#修正量
其中[X Y]设定范围,为一线段,“#”后跟的数值为该线段处的修正量,因此实际操作时至少需要设定两条线段才能真正确定一个图形范围,并且线段设定时需要保证两线段所确定的范围能把范围内的所有水深点包入。
选择原始水深数据文件和结果存储文件后,系统根据设定对水深数据水深值进行插值计算修正并保存在结果文件中。
数据规范化
数据规范化针对水深数据点水深值的测量单位进行规范化处理,统一处理成米制单位。
处理时针对数据文件进行操作。
坐标转换
坐标转换提供大地坐标和平面坐标互相转换功能。
包括单点转换
和文件转换,文件转换针对文件进行操作。
单点转换在编辑框中输入对应坐标值进行相应转换,其中X坐标方向竖直向上,Y坐标方向水平向右。
数据格式转换
数据格式转换功能把各种电子水深数据转换为标准的xyz数据,处理结果可以在水下地形分析系统中使用。
目前数据格式支持五类:
第一类
第二类
第三类
第四类水深值在插入点上
第五类水深值以图块标注
具体操作步骤如下:
1)确定水深数据格式类型
2)指定水深数据所在的图层
3)如果水深数据以高程标注,则选择“高程方式标注”转换
成水深
4)设置完成后,按[确定]即可。
3.DEM分析功能
DEM分析功能包括三角网生成和修正,格网内插以及边界搜索功能。
三角网(TIN)是软件分析功能的基础,生成过程中采用了GIS 的空间索引功能,用户只需要设置三角形连接的最大边长和三角形的最小角度,如图示,用户可以根据实际地形进行修改。
系统中通常会根据数据属性给出参考值,如果没有特殊要求用户可以依照参考值建立三角网即可。
三角网删除用于删除多余连接的三角形。
此功能适用于比较复杂的地形状况。
建立的模型与实际情况出入较大的情况下,由用户根据实际地形手工操作实现。
操作时只需按照CAD命令行的提示用鼠标左键选择要删除的边即可。
三角网增加用于根据参数设定没有被连接而实际又需要三角网连接进行计算的情况。
操作时依次选择构成三角网的三个水深点,选择完成后自动建立新三角网并连接显示。
格网生成用于内插生成格网,需要设置纵向和横向的格网间距。
边界搜索根据三角网的连接结果生成区域边界。
4.等深线功能
初始生成等深线时根据默认设置文件生成,如果没有默认设置文件,则程序自动进行初始化设置。
等深线生成后程序提供窗口进行等深线显示及方式控制和重新设置功能。
点击,可以控制等深线的显示与关闭。
鼠标双击列表框中的任一行
可以控制对应深度的等深线的显示与关闭。
点击和可以分别控制等深线是否进行曲线拟合(等深线光滑)和显示及是否进行等深线标注。
5.水文分析
点击,进入水文分析界面。