kDCI a Multi-Strategy Algorithm for Mining Frequent Sets
Kernel SHAP 0.4.1 说明书
Package‘kernelshap’December3,2023Title Kernel SHAPVersion0.4.1Description Efficient implementation of Kernel SHAP,see Lundberg and Lee(2017),and Covert and Lee(2021)<http://proceedings.mlr.press/v130/covert21a>.Furthermore,for up to14features,exact permutation SHAP values can be calculated.Thepackage plays well together with meta-learning packages like'tidymodels','caret'or'mlr3'.Visualizations can be done using theR package'shapviz'.License GPL(>=2)Depends R(>=3.2.0)Encoding UTF-8RoxygenNote7.2.3Imports foreach,stats,utilsSuggests doFuture,testthat(>=3.0.0)Config/testthat/edition3URL https:///ModelOriented/kernelshapBugReports https:///ModelOriented/kernelshap/issuesNeedsCompilation noAuthor Michael Mayer[aut,cre],David Watson[aut],Przemyslaw Biecek[ctb](<https:///0000-0001-8423-1823>)Maintainer Michael Mayer<************************>Repository CRANDate/Publication2023-12-0314:20:02UTCR topics documented:is.kernelshap (2)is.permshap (3)12is.kernelshapkernelshap (3)permshap (9)print.kernelshap (11)print.permshap (12)summary.kernelshap (13)summary.permshap (14)Index15 is.kernelshap Check for kernelshapDescriptionIs object of class"kernelshap"?Usageis.kernelshap(object)Argumentsobject An R object.ValueTRUE if object is of class"kernelshap",and FALSE otherwise.See Alsokernelshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-kernelshap(fit,iris[1:2,-1],bg_X=iris[,-1])is.kernelshap(s)is.kernelshap("a")is.permshap3 is.permshap Check for permshapDescriptionIs object of class"permshap"?Usageis.permshap(object)Argumentsobject An R object.ValueTRUE if object is of class"permshap",and FALSE otherwise.See Alsokernelshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-permshap(fit,iris[1:2,-1],bg_X=iris[,-1])is.permshap(s)is.permshap("a")kernelshap Kernel SHAPDescriptionEfficient implementation of Kernel SHAP,see Lundberg and Lee(2017),and Covert and Lee (2021),abbreviated by CL21.For up to p=8features,the resulting Kernel SHAP values are exact regarding the selected background data.For larger p,an almost exact hybrid algorithm involving iterative sampling is used,see Details.Usagekernelshap(object,...)##Default S3method:kernelshap(object,X,bg_X,pred_fun=stats::predict,feature_names=colnames(X),bg_w=NULL,exact=length(feature_names)<=8L,hybrid_degree=1L+length(feature_names)%in%4:16,paired_sampling=TRUE,m=2L*length(feature_names)*(1L+3L*(hybrid_degree==0L)),tol=0.005,max_iter=100L,parallel=FALSE,parallel_args=NULL,verbose=TRUE,...)##S3method for class rangerkernelshap(object,X,bg_X,pred_fun=function(m,X,...)stats::predict(m,X,...)$predictions, feature_names=colnames(X),bg_w=NULL,exact=length(feature_names)<=8L,hybrid_degree=1L+length(feature_names)%in%4:16,paired_sampling=TRUE,m=2L*length(feature_names)*(1L+3L*(hybrid_degree==0L)),tol=0.005,max_iter=100L,parallel=FALSE,parallel_args=NULL,verbose=TRUE,...)##S3method for class Learnerkernelshap(object,X,bg_X,pred_fun =NULL,feature_names =colnames(X),bg_w =NULL,exact =length(feature_names)<=8L,hybrid_degree =1L +length(feature_names)%in%4:16,paired_sampling =TRUE,m =2L *length(feature_names)*(1L +3L *(hybrid_degree ==0L)),tol =0.005,max_iter =100L,parallel =FALSE,parallel_args =NULL,verbose =TRUE,...)Argumentsobject Fitted model object....Additional arguments passed to pred_fun(object,X,...).X(n ×p )matrix or data.frame with rows to be explained.The columns should only represent model features,not the response (but see feature_names on how to overrule this).bg_XBackground data used to integrate out "switched off"features,often a subset of the training data (typically 50to 500rows)It should contain the same columns as X .In cases with a natural "off"value (like MNIST digits),this can also be a single row with all values set to the off value.pred_funPrediction function of the form function(object,X,...),providing K ≥1predictions per row.Its first argument represents the model object ,its second argument a data structure like X .Additional (named)arguments are passed via ....The default,stats::predict(),will work in most cases.feature_names Optional vector of column names in X used to calculate SHAP values.By de-fault,this equals colnames(X).Not supported if X is a matrix.bg_w Optional vector of case weights for each row of bg_X .exactIf TRUE ,the algorithm will produce exact Kernel SHAP values with respect to the background data.In this case,the arguments hybrid_degree ,m ,paired_sampling ,tol ,and max_iter are ignored.The default is TRUE up to eight features,and FALSE otherwise.hybrid_degreeInteger controlling the exactness of the hybrid strategy.For 4≤p ≤16,the default is 2,otherwise it is 1.Ignored if exact =TRUE .•0:Pure sampling strategy not involving any exact part.It is strictly worse than the hybrid strategy and should therefore only be used for studying properties of the Kernel SHAP algorithm.•1:Uses all 2p on-off vectors z withz ∈{1,p −1}for the exact part,which covers at least 75%of the mass of the Kernel weight distribution.The remaining mass is covered by random sampling.•2:Uses all p (p +1)on-off vectors z withz ∈{1,2,p −2,p −1}.This covers at least 92%of the mass of the Kernel weight distribution.The remaining mass is covered by sampling.Convergence usually happens in the minimal possible number of iterations of two.•k>2:Uses all on-off vectors withz ∈{1,...,k,p −k,...,p −1}.paired_samplingLogical flag indicating whether to do the sampling in a paired manner.This means that with every on-off vector z ,also 1−z is considered.CL21shows its superiority compared to standard sampling,therefore the default (TRUE )should usually not be changed except for studying properties of Kernel SHAP algo-rithms.Ignored if exact =TRUE .m Even number of on-off vectors sampled during one iteration.The default is 2p ,except when hybrid_degree ==0.Then it is set to 8p .Ignored if exact =TRUE .tolTolerance determining when to stop.Following CL21,the algorithm keeps iter-ating until max (σn )/(max (βn )−min (βn ))<tol,where the βn are the SHAP values of a given observation,and σn their standard errors.For multidimen-sional predictions,the criterion must be satisfied for each dimension separately.The stopping criterion uses the fact that standard errors and SHAP values are all on the same scale.Ignored if exact =TRUE .max_iter If the stopping criterion (see tol )is not reached after max_iter iterations,the algorithm stops.Ignored if exact =TRUE .parallelIf TRUE ,use parallel foreach::foreach()to loop over rows to be explained.Must register backend beforehand,e.g.,via ’doFuture’package,see README for an example.Parallelization automatically disables the progress bar.parallel_argsNamed list of arguments passed to foreach::foreach().Ideally,this is NULL (default).Only relevant if parallel =TRUE .Example on Windows:if object is a GAM fitted with package ’mgcv’,then one might need to set parallel_args =list(.packages ="mgcv").verbose Set to FALSE to suppress messages and the progress bar.DetailsPure iterative Kernel SHAP sampling as in Covert and Lee (2021)works like this:1.A binary "on-off"vector z is drawn from {0,1}p such that its sum follows the SHAP Kernel weight distribution (normalized to the range {1,...,p −1}).2.For each j with z j =1,the j -th column of the original background data is replaced by the corresponding feature value x j of the observation to be explained.3.The average prediction v z on the data of Step 2is calculated,and the average prediction v 0on the background data is subtracted.4.Steps 1to 3are repeated m times.This produces a binary m ×p matrix Z (each row equals one of the z )and a vector v of shifted predictions.5.v is regressed onto Z under the constraint that the sum of the coefficients equals v 1−v 0,where v 1is the prediction of the observation to be explained.The resulting coefficients are the Kernel SHAP values.This is repeated multiple times until convergence,see CL21for details.A drawback of this strategy is that many (at least 75%)of the z vectors will havez ∈{1,p −1},producing many duplicates.Similarly,at least 92%of the mass will be used for the p (p +1)possible vectors withz ∈{1,2,p −2,p −1}.This inefficiency can be fixed by a hybrid strategy,combining exact calculations with sampling.The hybrid algorithm has two steps:1.Step 1(exact part):There are 2p different on-off vectors z withz ∈{1,p −1},covering a large proportion of the Kernel SHAP distribution.The degree 1hybrid will list those vectors and use them according to their weights in the upcoming calculations.Depending on p ,we can also go a step further to a degree 2hybrid by adding all p (p −1)vectors with z ∈{2,p −2}to the process etc.The necessary predictions are obtained along with other calculations similar to those described in CL21.2.Step 2(sampling part):The remaining weight is filled by sampling vectors z according to Kernel SHAP weights renormalized to the values not yet covered by Step 1.Together with the results from Step 1-correctly weighted -this now forms a complete iteration as in CL21.The difference is that most mass is covered by exact calculations.Afterwards,the algorithm iterates until convergence.The output of Step 1is reused in every iteration,leading to an extremely efficient strategy.If p is sufficiently small,all possible 2p −2on-off vectors z can be evaluated.In this case,no sampling is required and the algorithm returns exact Kernel SHAP values with respect to the given background data.Since kernelshap()calculates predictions on data with MN rows (N is the background data size and M the number of z vectors),p should not be much higher than 10for exact calculations.For similar reasons,degree 2hybrids should not use p much larger than 40.ValueAn object of class "kernelshap"with the following components:•S :(n ×p )matrix with SHAP values or,if the model output has dimension K >1,a list of K such matrices.•X :Same as input argument X .•baseline :Vector of length K representing the average prediction on the background data.•SE :Standard errors corresponding to S (and organized like S ).•n_iter :Integer vector of length n providing the number of iterations per row of X .•converged :Logical vector of length n indicating convergence per row of X .•m :Integer providing the effective number of sampled on-off vectors used per iteration.•m_exact :Integer providing the effective number of exact on-off vectors used per iteration.•prop_exact :Proportion of the Kernel SHAP weight distribution covered by exact calcula-tions.•exact :Logical flag indicating whether calculations are exact or not.•txt :Summary text.•predictions :(n ×K )matrix with predictions of X .Methods(by class)•kernelshap(default):Default Kernel SHAP method.•kernelshap(ranger):Kernel SHAP method for"ranger"models,see Readme for an exam-ple.•kernelshap(Learner):Kernel SHAP method for"mlr3"models,see Readme for an exam-ple.References1.Scott M.Lundberg and Su-In Lee.A unified approach to interpreting model predictions.Proceedings of the31st International Conference on Neural Information Processing Systems, 2017.2.Ian Covert and Su-In Lee.Improving KernelSHAP:Practical Shapley Value Estimation Us-ing Linear Regression.Proceedings of The24th International Conference on Artificial Intel-ligence and Statistics,PMLR130:3457-3465,2021.Examples#MODEL ONE:Linear regressionfit<-lm(Sepal.Length~.,data=iris)#Select rows to explain(only feature columns)X_explain<-iris[1:2,-1]#Select small background dataset(could use all rows here because iris is small)set.seed(1)bg_X<-iris[sample(nrow(iris),100),]#Calculate SHAP valuess<-kernelshap(fit,X_explain,bg_X=bg_X)s#MODEL TWO:Multi-response linear regressionfit<-lm(as.matrix(iris[,1:2])~Petal.Length+Petal.Width+Species,data=iris) s<-kernelshap(fit,iris[1:4,3:5],bg_X=bg_X)summary(s)#Non-feature columns can be dropped via feature_namess<-kernelshap(fit,iris[1:4,],bg_X=bg_X,feature_names=c("Petal.Length","Petal.Width","Species"))spermshap Permutation SHAPDescriptionExact permutation SHAP algorithm with respect to a background dataset,see Strumbelj and Kononenko.The function works for up to14features.Usagepermshap(object,...)##Default S3method:permshap(object,X,bg_X,pred_fun=stats::predict,feature_names=colnames(X),bg_w=NULL,parallel=FALSE,parallel_args=NULL,verbose=TRUE,...)##S3method for class rangerpermshap(object,X,bg_X,pred_fun=function(m,X,...)stats::predict(m,X,...)$predictions,feature_names=colnames(X),bg_w=NULL,parallel=FALSE,parallel_args=NULL,verbose=TRUE,...)##S3method for class Learnerpermshap(object,X,bg_X,pred_fun=NULL,feature_names=colnames(X),bg_w=NULL,parallel=FALSE,parallel_args=NULL,verbose=TRUE,...)Argumentsobject Fitted model object....Additional arguments passed to pred_fun(object,X,...).X(n×p)matrix or data.frame with rows to be explained.The columns should only represent model features,not the response(but see feature_names on howto overrule this).bg_X Background data used to integrate out"switched off"features,often a subset of the training data(typically50to500rows)It should contain the same columnsas X.In cases with a natural"off"value(like MNIST digits),this can also be asingle row with all values set to the off value.pred_fun Prediction function of the form function(object,X,...),providing K≥1 predictions per row.Itsfirst argument represents the model object,its secondargument a data structure like X.Additional(named)arguments are passed via....The default,stats::predict(),will work in most cases.feature_names Optional vector of column names in X used to calculate SHAP values.By de-fault,this equals colnames(X).Not supported if X is a matrix.bg_w Optional vector of case weights for each row of bg_X.parallel If TRUE,use parallel foreach::foreach()to loop over rows to be explained.Must register backend beforehand,e.g.,via’doFuture’package,see READMEfor an example.Parallelization automatically disables the progress bar.parallel_args Named list of arguments passed to foreach::foreach().Ideally,this is NULL (default).Only relevant if parallel=TRUE.Example on Windows:if object isa GAMfitted with package’mgcv’,then one might need to set parallel_args=list(.packages="mgcv").verbose Set to FALSE to suppress messages and the progress bar.ValueAn object of class"permshap"with the following components:•S:(n×p)matrix with SHAP values or,if the model output has dimension K>1,a list of K such matrices.•X:Same as input argument X.•baseline:Vector of length K representing the average prediction on the background data.•m_exact:Integer providing the effective number of exact on-off vectors used.•exact:Logicalflag indicating whether calculations are exact or not(currently TRUE).•txt:Summary text.•predictions:(n×K)matrix with predictions of X.print.kernelshap11Methods(by class)•permshap(default):Default permutation SHAP method.•permshap(ranger):Permutation SHAP method for"ranger"models,see Readme for an ex-ample.•permshap(Learner):Permutation SHAP method for"mlr3"models,see Readme for an ex-ample.References1.Erik Strumbelj and Igor Kononenko.Explaining prediction models and individual predictionswith feature contributions.Knowledge and Information Systems41,2014.Examples#MODEL ONE:Linear regressionfit<-lm(Sepal.Length~.,data=iris)#Select rows to explain(only feature columns)X_explain<-iris[1:2,-1]#Select small background dataset(could use all rows here because iris is small)set.seed(1)bg_X<-iris[sample(nrow(iris),100),]#Calculate SHAP valuess<-permshap(fit,X_explain,bg_X=bg_X)s#MODEL TWO:Multi-response linear regressionfit<-lm(as.matrix(iris[,1:2])~Petal.Length+Petal.Width+Species,data=iris) s<-permshap(fit,iris[1:4,3:5],bg_X=bg_X)s#Non-feature columns can be dropped via feature_namess<-permshap(fit,iris[1:4,],bg_X=bg_X,feature_names=c("Petal.Length","Petal.Width","Species"))sprint.kernelshap Prints"kernelshap"ObjectDescriptionPrints"kernelshap"Object12print.permshapUsage##S3method for class kernelshapprint(x,n=2L,...)Argumentsx An object of class"kernelshap".n Maximum number of rows of SHAP values to print....Further arguments passed from other methods.ValueInvisibly,the input is returned.See Alsokernelshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-kernelshap(fit,iris[1:3,-1],bg_X=iris[,-1])sprint.permshap Prints"permshap"ObjectDescriptionPrints"permshap"ObjectUsage##S3method for class permshapprint(x,n=2L,...)Argumentsx An object of class"permshap".n Maximum number of rows of SHAP values to print....Further arguments passed from other methods.ValueInvisibly,the input is returned.summary.kernelshap13See Alsopermshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-permshap(fit,iris[1:3,-1],bg_X=iris[,-1])ssummary.kernelshap Summarizes"kernelshap"ObjectDescriptionSummarizes"kernelshap"ObjectUsage##S3method for class kernelshapsummary(object,compact=FALSE,n=2L,...)Argumentsobject An object of class"kernelshap".compact Set to TRUE for a more compact summary.n Maximum number of rows of SHAP values etc.to print....Further arguments passed from other methods.ValueInvisibly,the input is returned.See Alsokernelshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-kernelshap(fit,iris[1:3,-1],bg_X=iris[,-1])summary(s)14summary.permshap summary.permshap Summarizes"permshap"ObjectDescriptionSummarizes"permshap"ObjectUsage##S3method for class permshapsummary(object,compact=FALSE,n=2L,...)Argumentsobject An object of class"permshap".compact Set to TRUE for a more compact summary.n Maximum number of rows of SHAP values etc.to print....Further arguments passed from other methods.ValueInvisibly,the input is returned.See Alsopermshap()Examplesfit<-lm(Sepal.Length~.,data=iris)s<-permshap(fit,iris[1:3,-1],bg_X=iris[,-1])summary(s)Indexforeach::foreach(),6,10is.kernelshap,2is.permshap,3kernelshap,3kernelshap(),2,3,7,12,13permshap,9permshap(),13,14print.kernelshap,11print.permshap,12stats::predict(),5,10summary.kernelshap,13summary.permshap,1415。
z--

GA (u; f ) =
M X i=1
ai kLi u ? fi k2;A 0
Abstract. We establish an a-posteriori error estimate, with corresponding bounds, that is valid for any FOSLS L2 -minimization problem. Such estimates follow almost immediately from the FOSLS formulation, but they are usually di cult to establish for other methodologies. We present some numerical examples to support our theoretical results. We also establish a local a-priori lower error bound that is useful for indicating when re nement is necessary and for determining the initial grid. Finally, we obtain a sharp theoretical error estimate under certain assumptions on the re nement region and show how this provides the basis for an e ective re nement strategy. The local a-priori lower error bound and the sharp theoretical error estimate both appear to be unique to the leastsquares approach.
5G术语大全

5G无线侧术语大全数字2G2nd Generation,第二代移动通信系统。
3G3rd Generation,第三代移动通信系统。
4G4th Generation,第四代移动通信系统。
5G5th Generation,第五代移动通信系统。
3DES Triple Data Encryption Standard,三重数据加密标准。
3DES(即Triple DES)是DES向AES过渡的加密算法(1999年,NIST将3DES指定为过渡的加密标准),是DES的一个更安全的变形。
3DES是DES加密算法的一种模式,它使用3条56位的密钥对数据进行三次加密。
3GPP Third Generation Partnership Project,第三代合作伙伴计划。
成立于1998年,由许多国家和地区的电信标准化组织共同组成,是一个具有广泛代表性的国际标准化组织,是3G技术的重要制定者。
它存在的意义,就是为了协调成员之间的矛盾,制定规则和契约。
5GC5G Core Network,5G 核心网。
5G NSA5G Non-Standalone,5G非独立组网。
5G不能直接连核心网,通过4G控制面接入,再通过双连接的方式使用户面在4G和5G分流。
5G SA5G Standalone,5G独立组网。
采用端到端的5G网络架构,从终端、无线新空口到核心网都采用5G相关标准,支持5G各类接口,实现5G各项功能,提供5G类服务。
5G RAN5G Radio Access Network,5G 接入网。
5QI5G QoS Identifier,5G QoS指示符。
802.1x基于客户端/服务器的访问控制和认证协议。
它可以限制未经授权的用户/设备通过接入端口访问LAN/WLAN。
当客户端与AP关联后,是否可以使用AP提供的无线服务要取决于802.1x的认证结果。
如果客户端能通过认证,就可以访问WLAN中的资源;如果不能通过认证,则无法访问WLAN中的资源。
清华大学算法讲义 A Multiple-Choice Secretary Algorithm with Applications to Online Auctions

1
Introduction
Consider the following game between two parties, Alice and Bob. Alice writes down a set S consisting of n non-negative real numbers. Bob knows the value of'rz but otherwise has no information about S. The elements of S are revealed to Bob one by one, in random order. After each element is revealed, he may decide whether to select it or discard it. Bob is allowed up to k selections, and seeks to maximize their sum. If k =- 1, then Bob may use the classical secretary algorithm: observe the first Ln/eJ elements and note their maximum, then select the next element which exceeds this value if such an element appears. As is well known, this algorithm succeeds in selecting the maximum element of S with probability tending to 1/e as ~z ~ oc; therefore, its competitive ratio tends to 1/e. For general k, what is the optimum competitive ratio? Does it approach ! as k ~ oc or remain bounded away from 1? Here, we answer this question by presenting an algorithm whose competitive ratio is 1 - O ( V / ~ ) . (In fact, we have also derived a matching lower bound demonstrating that the competitive ratio of any algorithm is 1 - f~(V/iT,). The lower bound is omitted from this paper for space reasons.) This algorithm contributes to a rich body of work on secretary problems and related topics, beginning in the 1960's [2, 4] with the determination of the optimal stopping rule for the best-choice or "secretary" problem, i.e. the problem of stopping at the maximum element of a randomlyordered sequence. In a long history of extensions and generalizations of this result, several "multiple choice secretary p r o b l e m s " - - in which the algorithm is allowed to select k > 1 items, as in this p a p e r - - have been studied. In many
基于多目标最优化方法的垂直切换判决

表示所有请 求
切 换 的 MN 的集 合 ; 表 示 所 有 与 AP或 B s保 持 连 接 的 MN ,分 别表 示 与 APB , S保
中图分类号: P9 T 33
基 于 多 目标 最优 化 方 法 的垂 直切 换 判 决
唐德军 ’ ,赵宜升 ,李 云
【 承庆广播 电}大学继续教 育学 院,重庆 4 03 ;2 l 见 0 0 9 .重庆邮 电火学无线信息 网络研究 中心,重 庆 4 0 6 ) 0 0 5
摘
要 :当多个移动 节点在 蜂窝网与无线 局域网共存的异构无线 网络环境 中移动 时,综合考虑移动节点的 电池寿命、基 站与接 入点 的负载
T G - n, HAO Y - e g, 1 u AN De u ‘Z j i h n L n s Y
f . niun u ainColg , o qn do& TV ie st, o g ig4 00 9; Co tn igEd c to l e Ch ng igRa i 1 e Unv ri Ch n qn 0 3 y
第3 6卷 第 l 期 6
正 36
・
计
算
机
工
程
21 0 0年 8月
Aug t2 0 us 01
No1 .6
A Discriminatively Trained, Multiscale, Deformable Part Model
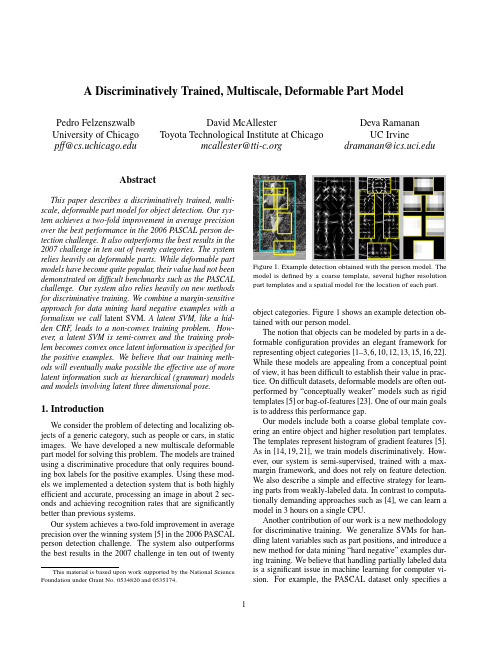
A Discriminatively Trained,Multiscale,Deformable Part ModelPedro Felzenszwalb University of Chicago pff@David McAllesterToyota Technological Institute at Chicagomcallester@Deva RamananUC Irvinedramanan@AbstractThis paper describes a discriminatively trained,multi-scale,deformable part model for object detection.Our sys-tem achieves a two-fold improvement in average precision over the best performance in the2006PASCAL person de-tection challenge.It also outperforms the best results in the 2007challenge in ten out of twenty categories.The system relies heavily on deformable parts.While deformable part models have become quite popular,their value had not been demonstrated on difficult benchmarks such as the PASCAL challenge.Our system also relies heavily on new methods for discriminative training.We combine a margin-sensitive approach for data mining hard negative examples with a formalism we call latent SVM.A latent SVM,like a hid-den CRF,leads to a non-convex training problem.How-ever,a latent SVM is semi-convex and the training prob-lem becomes convex once latent information is specified for the positive examples.We believe that our training meth-ods will eventually make possible the effective use of more latent information such as hierarchical(grammar)models and models involving latent three dimensional pose.1.IntroductionWe consider the problem of detecting and localizing ob-jects of a generic category,such as people or cars,in static images.We have developed a new multiscale deformable part model for solving this problem.The models are trained using a discriminative procedure that only requires bound-ing box labels for the positive ing these mod-els we implemented a detection system that is both highly efficient and accurate,processing an image in about2sec-onds and achieving recognition rates that are significantly better than previous systems.Our system achieves a two-fold improvement in average precision over the winning system[5]in the2006PASCAL person detection challenge.The system also outperforms the best results in the2007challenge in ten out of twenty This material is based upon work supported by the National Science Foundation under Grant No.0534820and0535174.Figure1.Example detection obtained with the person model.The model is defined by a coarse template,several higher resolution part templates and a spatial model for the location of each part. object categories.Figure1shows an example detection ob-tained with our person model.The notion that objects can be modeled by parts in a de-formable configuration provides an elegant framework for representing object categories[1–3,6,10,12,13,15,16,22]. While these models are appealing from a conceptual point of view,it has been difficult to establish their value in prac-tice.On difficult datasets,deformable models are often out-performed by“conceptually weaker”models such as rigid templates[5]or bag-of-features[23].One of our main goals is to address this performance gap.Our models include both a coarse global template cov-ering an entire object and higher resolution part templates. The templates represent histogram of gradient features[5]. As in[14,19,21],we train models discriminatively.How-ever,our system is semi-supervised,trained with a max-margin framework,and does not rely on feature detection. We also describe a simple and effective strategy for learn-ing parts from weakly-labeled data.In contrast to computa-tionally demanding approaches such as[4],we can learn a model in3hours on a single CPU.Another contribution of our work is a new methodology for discriminative training.We generalize SVMs for han-dling latent variables such as part positions,and introduce a new method for data mining“hard negative”examples dur-ing training.We believe that handling partially labeled data is a significant issue in machine learning for computer vi-sion.For example,the PASCAL dataset only specifies abounding box for each positive example of an object.We treat the position of each object part as a latent variable.We also treat the exact location of the object as a latent vari-able,requiring only that our classifier select a window that has large overlap with the labeled bounding box.A latent SVM,like a hidden CRF[19],leads to a non-convex training problem.However,unlike a hidden CRF, a latent SVM is semi-convex and the training problem be-comes convex once latent information is specified for thepositive training examples.This leads to a general coordi-nate descent algorithm for latent SVMs.System Overview Our system uses a scanning window approach.A model for an object consists of a global“root”filter and several part models.Each part model specifies a spatial model and a partfilter.The spatial model defines a set of allowed placements for a part relative to a detection window,and a deformation cost for each placement.The score of a detection window is the score of the root filter on the window plus the sum over parts,of the maxi-mum over placements of that part,of the partfilter score on the resulting subwindow minus the deformation cost.This is similar to classical part-based models[10,13].Both root and partfilters are scored by computing the dot product be-tween a set of weights and histogram of gradient(HOG) features within a window.The rootfilter is equivalent to a Dalal-Triggs model[5].The features for the partfilters are computed at twice the spatial resolution of the rootfilter. Our model is defined at afixed scale,and we detect objects by searching over an image pyramid.In training we are given a set of images annotated with bounding boxes around each instance of an object.We re-duce the detection problem to a binary classification prob-lem.Each example x is scored by a function of the form, fβ(x)=max zβ·Φ(x,z).Hereβis a vector of model pa-rameters and z are latent values(e.g.the part placements). To learn a model we define a generalization of SVMs that we call latent variable SVM(LSVM).An important prop-erty of LSVMs is that the training problem becomes convex if wefix the latent values for positive examples.This can be used in a coordinate descent algorithm.In practice we iteratively apply classical SVM training to triples( x1,z1,y1 ,..., x n,z n,y n )where z i is selected to be the best scoring latent label for x i under the model learned in the previous iteration.An initial rootfilter is generated from the bounding boxes in the PASCAL dataset. The parts are initialized from this rootfilter.2.ModelThe underlying building blocks for our models are the Histogram of Oriented Gradient(HOG)features from[5]. We represent HOG features at two different scales.Coarse features are captured by a rigid template covering anentireImage pyramidFigure2.The HOG feature pyramid and an object hypothesis de-fined in terms of a placement of the rootfilter(near the top of the pyramid)and the partfilters(near the bottom of the pyramid). detection window.Finer scale features are captured by part templates that can be moved with respect to the detection window.The spatial model for the part locations is equiv-alent to a star graph or1-fan[3]where the coarse template serves as a reference position.2.1.HOG RepresentationWe follow the construction in[5]to define a dense repre-sentation of an image at a particular resolution.The image isfirst divided into8x8non-overlapping pixel regions,or cells.For each cell we accumulate a1D histogram of gra-dient orientations over pixels in that cell.These histograms capture local shape properties but are also somewhat invari-ant to small deformations.The gradient at each pixel is discretized into one of nine orientation bins,and each pixel“votes”for the orientation of its gradient,with a strength that depends on the gradient magnitude.For color images,we compute the gradient of each color channel and pick the channel with highest gradi-ent magnitude at each pixel.Finally,the histogram of each cell is normalized with respect to the gradient energy in a neighborhood around it.We look at the four2×2blocks of cells that contain a particular cell and normalize the his-togram of the given cell with respect to the total energy in each of these blocks.This leads to a vector of length9×4 representing the local gradient information inside a cell.We define a HOG feature pyramid by computing HOG features of each level of a standard image pyramid(see Fig-ure2).Features at the top of this pyramid capture coarse gradients histogrammed over fairly large areas of the input image while features at the bottom of the pyramid capture finer gradients histogrammed over small areas.2.2.FiltersFilters are rectangular templates specifying weights for subwindows of a HOG pyramid.A w by hfilter F is a vector with w×h×9×4weights.The score of afilter is defined by taking the dot product of the weight vector and the features in a w×h subwindow of a HOG pyramid.The system in[5]uses a singlefilter to define an object model.That system detects objects from a particular class by scoring every w×h subwindow of a HOG pyramid and thresholding the scores.Let H be a HOG pyramid and p=(x,y,l)be a cell in the l-th level of the pyramid.Letφ(H,p,w,h)denote the vector obtained by concatenating the HOG features in the w×h subwindow of H with top-left corner at p.The score of F on this detection window is F·φ(H,p,w,h).Below we useφ(H,p)to denoteφ(H,p,w,h)when the dimensions are clear from context.2.3.Deformable PartsHere we consider models defined by a coarse rootfilter that covers the entire object and higher resolution partfilters covering smaller parts of the object.Figure2illustrates a placement of such a model in a HOG pyramid.The rootfil-ter location defines the detection window(the pixels inside the cells covered by thefilter).The partfilters are placed several levels down in the pyramid,so the HOG cells at that level have half the size of cells in the rootfilter level.We have found that using higher resolution features for defining partfilters is essential for obtaining high recogni-tion performance.With this approach the partfilters repre-sentfiner resolution edges that are localized to greater ac-curacy when compared to the edges represented in the root filter.For example,consider building a model for a face. The rootfilter could capture coarse resolution edges such as the face boundary while the partfilters could capture details such as eyes,nose and mouth.The model for an object with n parts is formally defined by a rootfilter F0and a set of part models(P1,...,P n) where P i=(F i,v i,s i,a i,b i).Here F i is afilter for the i-th part,v i is a two-dimensional vector specifying the center for a box of possible positions for part i relative to the root po-sition,s i gives the size of this box,while a i and b i are two-dimensional vectors specifying coefficients of a quadratic function measuring a score for each possible placement of the i-th part.Figure1illustrates a person model.A placement of a model in a HOG pyramid is given by z=(p0,...,p n),where p i=(x i,y i,l i)is the location of the rootfilter when i=0and the location of the i-th part when i>0.We assume the level of each part is such that a HOG cell at that level has half the size of a HOG cell at the root level.The score of a placement is given by the scores of eachfilter(the data term)plus a score of the placement of each part relative to the root(the spatial term), ni=0F i·φ(H,p i)+ni=1a i·(˜x i,˜y i)+b i·(˜x2i,˜y2i),(1)where(˜x i,˜y i)=((x i,y i)−2(x,y)+v i)/s i gives the lo-cation of the i-th part relative to the root location.Both˜x i and˜y i should be between−1and1.There is a large(exponential)number of placements for a model in a HOG pyramid.We use dynamic programming and distance transforms techniques[9,10]to compute the best location for the parts of a model as a function of the root location.This takes O(nk)time,where n is the number of parts in the model and k is the number of cells in the HOG pyramid.To detect objects in an image we score root locations according to the best possible placement of the parts and threshold this score.The score of a placement z can be expressed in terms of the dot product,β·ψ(H,z),between a vector of model parametersβand a vectorψ(H,z),β=(F0,...,F n,a1,b1...,a n,b n).ψ(H,z)=(φ(H,p0),φ(H,p1),...φ(H,p n),˜x1,˜y1,˜x21,˜y21,...,˜x n,˜y n,˜x2n,˜y2n,). We use this representation for learning the model parame-ters as it makes a connection between our deformable mod-els and linear classifiers.On interesting aspect of the spatial models defined here is that we allow for the coefficients(a i,b i)to be negative. This is more general than the quadratic“spring”cost that has been used in previous work.3.LearningThe PASCAL training data consists of a large set of im-ages with bounding boxes around each instance of an ob-ject.We reduce the problem of learning a deformable part model with this data to a binary classification problem.Let D=( x1,y1 ,..., x n,y n )be a set of labeled exam-ples where y i∈{−1,1}and x i specifies a HOG pyramid, H(x i),together with a range,Z(x i),of valid placements for the root and partfilters.We construct a positive exam-ple from each bounding box in the training set.For these ex-amples we define Z(x i)so the rootfilter must be placed to overlap the bounding box by at least50%.Negative exam-ples come from images that do not contain the target object. Each placement of the rootfilter in such an image yields a negative training example.Note that for the positive examples we treat both the part locations and the exact location of the rootfilter as latent variables.We have found that allowing uncertainty in the root location during training significantly improves the per-formance of the system(see Section4).tent SVMsA latent SVM is defined as follows.We assume that each example x is scored by a function of the form,fβ(x)=maxz∈Z(x)β·Φ(x,z),(2)whereβis a vector of model parameters and z is a set of latent values.For our deformable models we define Φ(x,z)=ψ(H(x),z)so thatβ·Φ(x,z)is the score of placing the model according to z.In analogy to classical SVMs we would like to trainβfrom labeled examples D=( x1,y1 ,..., x n,y n )by optimizing the following objective function,β∗(D)=argminβλ||β||2+ni=1max(0,1−y i fβ(x i)).(3)By restricting the latent domains Z(x i)to a single choice, fβbecomes linear inβ,and we obtain linear SVMs as a special case of latent tent SVMs are instances of the general class of energy-based models[18].3.2.Semi-ConvexityNote that fβ(x)as defined in(2)is a maximum of func-tions each of which is linear inβ.Hence fβ(x)is convex inβ.This implies that the hinge loss max(0,1−y i fβ(x i)) is convex inβwhen y i=−1.That is,the loss function is convex inβfor negative examples.We call this property of the loss function semi-convexity.Consider an LSVM where the latent domains Z(x i)for the positive examples are restricted to a single choice.The loss due to each positive example is now bined with the semi-convexity property,(3)becomes convex inβ.If the labels for the positive examples are notfixed we can compute a local optimum of(3)using a coordinate de-scent algorithm:1.Holdingβfixed,optimize the latent values for the pos-itive examples z i=argmax z∈Z(xi )β·Φ(x,z).2.Holding{z i}fixed for positive examples,optimizeβby solving the convex problem defined above.It can be shown that both steps always improve or maintain the value of the objective function in(3).If both steps main-tain the value we have a strong local optimum of(3),in the sense that Step1searches over an exponentially large space of latent labels for positive examples while Step2simulta-neously searches over weight vectors and an exponentially large space of latent labels for negative examples.3.3.Data Mining Hard NegativesIn object detection the vast majority of training exam-ples are negative.This makes it infeasible to consider all negative examples at a time.Instead,it is common to con-struct training data consisting of the positive instances and “hard negative”instances,where the hard negatives are data mined from the very large set of possible negative examples.Here we describe a general method for data mining ex-amples for SVMs and latent SVMs.The method iteratively solves subproblems using only hard instances.The innova-tion of our approach is a theoretical guarantee that it leads to the exact solution of the training problem defined using the complete training set.Our results require the use of a margin-sensitive definition of hard examples.The results described here apply both to classical SVMs and to the problem defined by Step2of the coordinate de-scent algorithm for latent SVMs.We omit the proofs of the theorems due to lack of space.These results are related to working set methods[17].We define the hard instances of D relative toβas,M(β,D)={ x,y ∈D|yfβ(x)≤1}.(4)That is,M(β,D)are training examples that are incorrectly classified or near the margin of the classifier defined byβ. We can show thatβ∗(D)only depends on hard instances. Theorem1.Let C be a subset of the examples in D.If M(β∗(D),D)⊆C thenβ∗(C)=β∗(D).This implies that in principle we could train a model us-ing a small set of examples.However,this set is defined in terms of the optimal modelβ∗(D).Given afixedβwe can use M(β,D)to approximate M(β∗(D),D).This suggests an iterative algorithm where we repeatedly compute a model from the hard instances de-fined by the model from the last iteration.This is further justified by the followingfixed-point theorem.Theorem2.Ifβ∗(M(β,D))=βthenβ=β∗(D).Let C be an initial“cache”of examples.In practice we can take the positive examples together with random nega-tive examples.Consider the following iterative algorithm: 1.Letβ:=β∗(C).2.Shrink C by letting C:=M(β,C).3.Grow C by adding examples from M(β,D)up to amemory limit L.Theorem3.If|C|<L after each iteration of Step2,the algorithm will converge toβ=β∗(D)infinite time.3.4.Implementation detailsMany of the ideas discussed here are only approximately implemented in our current system.In practice,when train-ing a latent SVM we iteratively apply classical SVM train-ing to triples x1,z1,y1 ,..., x n,z n,y n where z i is se-lected to be the best scoring latent label for x i under themodel trained in the previous iteration.Each of these triples leads to an example Φ(x i,z i),y i for training a linear clas-sifier.This allows us to use a highly optimized SVM pack-age(SVMLight[17]).On a single CPU,the entire training process takes3to4hours per object class in the PASCAL datasets,including initialization of the parts.Root Filter Initialization:For each category,we auto-matically select the dimensions of the rootfilter by looking at statistics of the bounding boxes in the training data.1We train an initial rootfilter F0using an SVM with no latent variables.The positive examples are constructed from the unoccluded training examples(as labeled in the PASCAL data).These examples are anisotropically scaled to the size and aspect ratio of thefilter.We use random subwindows from negative images to generate negative examples.Root Filter Update:Given the initial rootfilter trained as above,for each bounding box in the training set wefind the best-scoring placement for thefilter that significantly overlaps with the bounding box.We do this using the orig-inal,un-scaled images.We retrain F0with the new positive set and the original random negative set,iterating twice.Part Initialization:We employ a simple heuristic to ini-tialize six parts from the rootfilter trained above.First,we select an area a such that6a equals80%of the area of the rootfilter.We greedily select the rectangular region of area a from the rootfilter that has the most positive energy.We zero out the weights in this region and repeat until six parts are selected.The partfilters are initialized from the rootfil-ter values in the subwindow selected for the part,butfilled in to handle the higher spatial resolution of the part.The initial deformation costs measure the squared norm of a dis-placement with a i=(0,0)and b i=−(1,1).Model Update:To update a model we construct new training data triples.For each positive bounding box in the training data,we apply the existing detector at all positions and scales with at least a50%overlap with the given bound-ing box.Among these we select the highest scoring place-ment as the positive example corresponding to this training bounding box(Figure3).Negative examples are selected byfinding high scoring detections in images not containing the target object.We add negative examples to a cache un-til we encounterfile size limits.A new model is trained by running SVMLight on the positive and negative examples, each labeled with part placements.We update the model10 times using the cache scheme described above.In each it-eration we keep the hard instances from the previous cache and add as many new hard instances as possible within the memory limit.Toward thefinal iterations,we are able to include all hard instances,M(β,D),in the cache.1We picked a simple heuristic by cross-validating over5object classes. We set the model aspect to be the most common(mode)aspect in the data. We set the model size to be the largest size not larger than80%of thedata.Figure3.The image on the left shows the optimization of the la-tent variables for a positive example.The dotted box is the bound-ing box label provided in the PASCAL training set.The large solid box shows the placement of the detection window while the smaller solid boxes show the placements of the parts.The image on the right shows a hard-negative example.4.ResultsWe evaluated our system using the PASCAL VOC2006 and2007comp3challenge datasets and protocol.We refer to[7,8]for details,but emphasize that both challenges are widely acknowledged as difficult testbeds for object detec-tion.Each dataset contains several thousand images of real-world scenes.The datasets specify ground-truth bounding boxes for several object classes,and a detection is consid-ered correct when it overlaps more than50%with a ground-truth bounding box.One scores a system by the average precision(AP)of its precision-recall curve across a testset.Recent work in pedestrian detection has tended to report detection rates versus false positives per window,measured with cropped positive examples and negative images with-out objects of interest.These scores are tied to the reso-lution of the scanning window search and ignore effects of non-maximum suppression,making it difficult to compare different systems.We believe the PASCAL scoring method gives a more reliable measure of performance.The2007challenge has20object categories.We entered a preliminary version of our system in the official competi-tion,and obtained the best score in6categories.Our current system obtains the highest score in10categories,and the second highest score in6categories.Table1summarizes the results.Our system performs well on rigid objects such as cars and sofas as well as highly deformable objects such as per-sons and horses.We also note that our system is successful when given a large or small amount of training data.There are roughly4700positive training examples in the person category but only250in the sofa category.Figure4shows some of the models we learned.Figure5shows some ex-ample detections.We evaluated different components of our system on the longer-established2006person dataset.The top AP scoreaero bike bird boat bottle bus car cat chair cow table dog horse mbike person plant sheep sofa train tvOur rank 31211224111422112141Our score .180.411.092.098.249.349.396.110.155.165.110.062.301.337.267.140.141.156.206.336Darmstadt .301INRIA Normal .092.246.012.002.068.197.265.018.097.039.017.016.225.153.121.093.002.102.157.242INRIA Plus.136.287.041.025.077.279.294.132.106.127.067.071.335.249.092.072.011.092.242.275IRISA .281.318.026.097.119.289.227.221.175.253MPI Center .060.110.028.031.000.164.172.208.002.044.049.141.198.170.091.004.091.034.237.051MPI ESSOL.152.157.098.016.001.186.120.240.007.061.098.162.034.208.117.002.046.147.110.054Oxford .262.409.393.432.375.334TKK .186.078.043.072.002.116.184.050.028.100.086.126.186.135.061.019.036.058.067.090Table 1.PASCAL VOC 2007results.Average precision scores of our system and other systems that entered the competition [7].Empty boxes indicate that a method was not tested in the corresponding class.The best score in each class is shown in bold.Our current system ranks first in 10out of 20classes.A preliminary version of our system ranked first in 6classes in the official competition.BottleCarBicycleSofaFigure 4.Some models learned from the PASCAL VOC 2007dataset.We show the total energy in each orientation of the HOG cells in the root and part filters,with the part filters placed at the center of the allowable displacements.We also show the spatial model for each part,where bright values represent “cheap”placements,and dark values represent “expensive”placements.in the PASCAL competition was .16,obtained using a rigid template model of HOG features [5].The best previous re-sult of.19adds a segmentation-based verification step [20].Figure 6summarizes the performance of several models we trained.Our root-only model is equivalent to the model from [5]and it scores slightly higher at .18.Performance jumps to .24when the model is trained with a LSVM that selects a latent position and scale for each positive example.This suggests LSVMs are useful even for rigid templates because they allow for self-adjustment of the detection win-dow in the training examples.Adding deformable parts in-creases performance to .34AP —a factor of two above the best previous score.Finally,we trained a model with partsbut no root filter and obtained .29AP.This illustrates the advantage of using a multiscale representation.We also investigated the effect of the spatial model and allowable deformations on the 2006person dataset.Recall that s i is the allowable displacement of a part,measured in HOG cells.We trained a rigid model with high-resolution parts by setting s i to 0.This model outperforms the root-only system by .27to .24.If we increase the amount of allowable displacements without using a deformation cost,we start to approach a bag-of-features.Performance peaks at s i =1,suggesting it is useful to constrain the part dis-placements.The optimal strategy allows for larger displace-ments while using an explicit deformation cost.The follow-Figure 5.Some results from the PASCAL 2007dataset.Each row shows detections using a model for a specific class (Person,Bottle,Car,Sofa,Bicycle,Horse).The first three columns show correct detections while the last column shows false positives.Our system is able to detect objects over a wide range of scales (such as the cars)and poses (such as the horses).The system can also detect partially occluded objects such as a person behind a bush.Note how the false detections are often quite reasonable,for example detecting a bus with the car model,a bicycle sign with the bicycle model,or a dog with the horse model.In general the part filters represent meaningful object parts that are well localized in each detection such as the head in the person model.Figure6.Evaluation of our system on the PASCAL VOC2006 person dataset.Root uses only a rootfilter and no latent place-ment of the detection windows on positive examples.Root+Latent uses a rootfilter with latent placement of the detection windows. Parts+Latent is a part-based system with latent detection windows but no rootfilter.Root+Parts+Latent includes both root and part filters,and latent placement of the detection windows.ing table shows AP as a function of freely allowable defor-mation in thefirst three columns.The last column gives the performance when using a quadratic deformation cost and an allowable displacement of2HOG cells.s i01232+quadratic costAP.27.33.31.31.345.DiscussionWe introduced a general framework for training SVMs with latent structure.We used it to build a recognition sys-tem based on multiscale,deformable models.Experimental results on difficult benchmark data suggests our system is the current state-of-the-art in object detection.LSVMs allow for exploration of additional latent struc-ture for recognition.One can consider deeper part hierar-chies(parts with parts),mixture models(frontal vs.side cars),and three-dimensional pose.We would like to train and detect multiple classes together using a shared vocab-ulary of parts(perhaps visual words).We also plan to use A*search[11]to efficiently search over latent parameters during detection.References[1]Y.Amit and A.Trouve.POP:Patchwork of parts models forobject recognition.IJCV,75(2):267–282,November2007.[2]M.Burl,M.Weber,and P.Perona.A probabilistic approachto object recognition using local photometry and global ge-ometry.In ECCV,pages II:628–641,1998.[3] D.Crandall,P.Felzenszwalb,and D.Huttenlocher.Spatialpriors for part-based recognition using statistical models.In CVPR,pages10–17,2005.[4] D.Crandall and D.Huttenlocher.Weakly supervised learn-ing of part-based spatial models for visual object recognition.In ECCV,pages I:16–29,2006.[5]N.Dalal and B.Triggs.Histograms of oriented gradients forhuman detection.In CVPR,pages I:886–893,2005.[6] B.Epshtein and S.Ullman.Semantic hierarchies for recog-nizing objects and parts.In CVPR,2007.[7]M.Everingham,L.Van Gool,C.K.I.Williams,J.Winn,and A.Zisserman.The PASCAL Visual Object Classes Challenge2007(VOC2007)Results./challenges/VOC/voc2007/workshop.[8]M.Everingham, A.Zisserman, C.K.I.Williams,andL.Van Gool.The PASCAL Visual Object Classes Challenge2006(VOC2006)Results./challenges/VOC/voc2006/results.pdf.[9]P.Felzenszwalb and D.Huttenlocher.Distance transformsof sampled functions.Cornell Computing and Information Science Technical Report TR2004-1963,September2004.[10]P.Felzenszwalb and D.Huttenlocher.Pictorial structures forobject recognition.IJCV,61(1),2005.[11]P.Felzenszwalb and D.McAllester.The generalized A*ar-chitecture.JAIR,29:153–190,2007.[12]R.Fergus,P.Perona,and A.Zisserman.Object class recog-nition by unsupervised scale-invariant learning.In CVPR, 2003.[13]M.Fischler and R.Elschlager.The representation andmatching of pictorial structures.IEEE Transactions on Com-puter,22(1):67–92,January1973.[14] A.Holub and P.Perona.A discriminative framework formodelling object classes.In CVPR,pages I:664–671,2005.[15]S.Ioffe and D.Forsyth.Probabilistic methods forfindingpeople.IJCV,43(1):45–68,June2001.[16]Y.Jin and S.Geman.Context and hierarchy in a probabilisticimage model.In CVPR,pages II:2145–2152,2006.[17]T.Joachims.Making large-scale svm learning practical.InB.Sch¨o lkopf,C.Burges,and A.Smola,editors,Advances inKernel Methods-Support Vector Learning.MIT Press,1999.[18]Y.LeCun,S.Chopra,R.Hadsell,R.Marc’Aurelio,andF.Huang.A tutorial on energy-based learning.InG.Bakir,T.Hofman,B.Sch¨o lkopf,A.Smola,and B.Taskar,editors, Predicting Structured Data.MIT Press,2006.[19] A.Quattoni,S.Wang,L.Morency,M.Collins,and T.Dar-rell.Hidden conditional randomfields.PAMI,29(10):1848–1852,October2007.[20] ing segmentation to verify object hypothe-ses.In CVPR,pages1–8,2007.[21] D.Ramanan and C.Sminchisescu.Training deformablemodels for localization.In CVPR,pages I:206–213,2006.[22]H.Schneiderman and T.Kanade.Object detection using thestatistics of parts.IJCV,56(3):151–177,February2004. [23]J.Zhang,M.Marszalek,zebnik,and C.Schmid.Localfeatures and kernels for classification of texture and object categories:A comprehensive study.IJCV,73(2):213–238, June2007.。
带LMI约束的混合整数二次规划问题的全局最优性条件

F b e .,2 1 01 Vo _ O No I3 .1
第3 0卷
第 1 期
带 L 约 束 的 混 合 整 数 二 次 规 划 问 题 的 MI 全 局 最 优 性 条 件
秦 帅 , 云峰 , 祁 李
( 庆师范大学 重
倩, 祁艳 妮
4 04 ) 00 7
数 学 学 庆 文 理 学 院 学 报 (自然 科 学 版 ) Ju a o hnqn n esyo r n cecs( a rl c neE io ) or l fC o gigU i ri fA ta dS i e N t a Si c dt n n v t s n u e i
对 角元素 为 a 一, 的对 角矩 阵 , L 设 为所 有定 义在 R 上一 些实 值 函数 的集合 .
定义 1 ( 一次微 分 )
且P <q 对 于 任何 e∈ N 都 成 立.a , = ( a,
…
,
a ), ∈S , ∈S, =0 1 … , 且 S 是 A “F , , n.
[ 收稿 日期】 00一l 2 21 1— 1
[ 作者简介] 秦帅 (9 9一) 男 , 17 , 山东滕州人 , 硕士 , 主要从 事最优化理论与算法方面的研究
2 9
设 - R“ R且 0∈ R , ∈ , l )≥ 厂 一 : 若 厂 (
/ 。 )十Z ( )一£ 。 , ∈R , 4 f 厂 ( )V 贝 称 为I在 。 处 的 一次微 分.
其 中 Z ∈S 令 ,
: =
{ Q :=i } Q d( a g
对于( MMI , Q) 令
∈ R )
命 题 3 设 ∈ , 且 =A— ( z)+( A
频繁子图挖掘算法

经典算法
Apriori算法 "generation and test"思想: k-频繁子集用于生成 k+1-子集,根据downward closure property性质进行剪枝,生成 k+1候选集,通过 对数 据库进行扫描判断候选子集中哪些是频繁的。如此下去,直到不能找到频繁项集。 "downward closure propert"性质: 如果 k+1子集的任何一个k子集是非频繁的,则是k+1子集一定也是非频繁的。 a. AGM算法 每次添加一个顶点 b. FSG算法 每次添加一条边 FP-growth算法
(2)按照采用度量的不同进行分类:分为支持度(support)、支持度-置信度、MDL(minimumdescriPtionlength)三种。支持度型挖掘是以子图在输入图中出现的次数来作为度量的,大部分算法都是基于支持度 的;MDL型挖掘是以压缩输入数据的程度来度量,-般采用公式valuo(s,g)=dl(g)/(dl(g1)+dl(g2))来计算,其 中:是子图,g是输入的图集合,dl(g)表示图集合g的存储空间,dl(g2)表示把g中所有出现:的地方都用同-个顶 点替换后的图形所需的存储空间;支持度-置信度型挖掘是以既要满足最小支持度又要满足最小置信度来衡量的。 还有其它-些度量方法,这里就不再介绍了。
在剪枝的过程中,也需要很多时间来判断每个k+l候选子图的所有k子图是否都是频繁的。剪枝后的候选子图 仍然很多,因此需要大量的重复扫描输入图集合来计算候选子图的支持度。这就占用了大量的内存空间和CPU处 理时间,很难发现较大的模式子图,执行效率不高。而频繁子图挖掘算法是在挖掘算法算法的基础上提出来的。 区别在于频繁子图挖掘算法旨在发现连通的频繁子图,采用了一些特殊的技巧以提高性能。
基于多目标全局约束的任务分配和调度算法
基于多目标全局约束的任务分配和调度算法于琨;张正本;海本斋【摘要】针对嵌入式系统中大多数任务执行算法不考虑目标成本问题,提出了一种基于多目标全局约束的任务分配和调度算法.算法使用约束逻辑编程来对任务执行资源如处理单元、通信设备以及代码和数据存储量的使用进行多目标全局约束.算法假设ROM和RAM分别用于代码存储和数据存储,算法还考虑数据在数据存储器中的位置.实验结果表明,尽管在多个约束条件下,提出的任务分配和调度算法无论在代码存储和数据存储量使用方面,还是在对任务有效求解方面都能取得比普遍采用的贪婪调度算法更好的结果.%Aiming at the problem of target cost which is not cared about by most task execution algorithms in embedded systems,a task allocation and scheduling algorithm based on global constraints for multi-objective is proposed in this paper. The approach uses constraint logic programming to impose global constraints for multi-objective on the task execution resources such as processing units,communication devices and the usage of code and data memory.The proposed algo-rithm assumes that ROM and RAM are used for implementing code memory and data memory respectively,and also con-siders the actual placement of data in data memory.The experimental results show that,under the multiple constraints,the proposed task allocation and scheduling algorithm can perform both in terms of the usage of code and data memory as well as solving effectively the task better than the widely used greedy scheduling algorithms.【期刊名称】《计算机工程与应用》【年(卷),期】2018(054)008【总页数】6页(P55-60)【关键词】多目标;全局约束;分配和调度;存储量;成本【作者】于琨;张正本;海本斋【作者单位】河南工学院计算机科学与技术系,河南新乡453002;河南工学院计算机科学与技术系,河南新乡453002;河南师范大学计算机与信息工程学院,河南新乡453002【正文语种】中文【中图分类】TP3931 引言对于嵌入式系统应用来说,因为要处理大量的数据,所以其中的数据存储(Data Memory,DM)尤为重要,用合适数量的存储器件来实现低成本解决方案是人们最关心的问题。
A Theory for Multiresolution Signal Decomposition The Wavelet ...
I
Manuscript received July 30. 1987: revised December 23. 1988. This work was supported under the following Contracts and Grants: NSF grant IODCR-84 1077 1. Air Force Grant AFOSR F49620-85-K-0018. Army DAAG-29-84-K-0061. NSF-CERiDC82-19196 Ao2. and DARPAiONR ARPA N0014-85-K-0807. The author is with the Department of Computer Science Courant Institute of Mathematical Sciences. New York University. New York, NY 10012. IEEE Log Number 8928052.
674
IEEE TRANSACTIONS PATTERN ON ANALYSISAND MACHINE INTELLIGENCE.VOL. II, NO. 7. JULY 1%')
A Theory for Multiresolution Signal Decomposition: The Wavelet Representation
STEPHANE Gsolution representations are very effective for analyzing the information content of images. We study the properties of the operator which approximates a signal at a given resolution. We show that the difference of information between the approximation of a signal at the resolutions 2’ + ’ and 2jcan be extracted by decomposing this signal on a wavelet orthonormal basis of L*(R”). In LL(R ), a wavelet orthonormal basis is a family of functions ( @ w (2’ ~ n)) ,,,“jEZt, which is built by dilating and translating a unique function t+r(xl. This decomposition defines an orthogonal multiresolution representation called a wavelet representation. It is computed with a pyramidal algorithm based on convolutions with quadrature mirror lilters. For images, the wavelet representation differentiates several spatial orientations. We study the application of this representation to data compression in image coding, texture discrimination and fractal analysis. Index Terms-Coding, fractals, multiresolution pyramids, ture mirror filters, texture discrimination, wavelet transform. quadra-
MOEAD
1 The Performance of a New Version of MOEA/D on CEC09Unconstrained MOP Test InstancesQingfu Zhang,Wudong Liu and Hui LiAbstract—This paper describes the idea of MOEA/D and proposes a strategy for allocating the computational resource to different subproblems in MOEA/D.The new version of MOEA/D has been tested on all the CEC09unconstrained MOP test instances.Index Terms—MOEA/D,Test problems,Multiobjective opti-mization.I.I NTRODUCTIONA multiobjective optimization problem(MOP)can be stated as follows:minimize F(x)=(f1(x),...,f m(x))T(1)subject to x∈ΩwhereΩis the decision(variable)space,F:Ω→R m consists of m real-valued objective functions and R m is called the objective space.If x∈R n,all the objectives are continuous andΩis described byΩ={x∈R n|h j(x)≤0,j=1,...,k},where h j are continuous functions,we call(1)a continuous MOP.Very often,since the objectives in(1)contradict one another,no point inΩcan minimize all the objectives simul-taneously.One has to balance them.The best tradeoffs among the objectives can be defined by Pareto optimality.Let u,v∈R m,u is said to dominate v if and only if u i≤v i for every i∈{1,...,m}and u j<v j for at least one index j∈{1,...,m}.A point x∗∈Ωis Pareto optimal if there is no point x∈Ωsuch that F(x)dominates F(x∗).F(x∗)is then called a Pareto optimal(objective)vector.In other words, any improvement in a Pareto optimal point in one objective must lead to deterioration to at least one other objective.The set of all the Pareto optimal points is called the Pareto set(PS) and the set of all the Pareto optimal objective vectors is the Pareto front(PF)[1].Recent years have witnessed significant progress in the development of evolutionary algorithms(EAs)for dealing with MOPs.Multiobjective evolutionary algorithms(MOEAs)aim atfinding a set of representative Pareto optimal solutions in a single run.Most MOEAs are Pareto dominance based,they adopt single objective evolutionary algorithm frameworks and thefitness of each solution at each generation is mainly deter-mined by its Pareto dominance relations with other solutions Q.Zhang and W.Liu are with the School of Computer Science and Electronic Engineering,University of Essex,Colchester,CO43SQ,U.K {qzhang,wliui}@.H.Li is with Department of Computer Science,University of Nottingham, Nottingham,NG81BB,U.K in the population.NSGA-II[2],SPEA-II[3]and PAES[4]are among the most popular Pareto dominance based MOEAs.A Pareto optimal solution to an MOP could be an optimal solution of a single objective optimization problem in which the objective is a linear or nonlinear aggregation function of all the individual objectives.Therefore,approximation of the PF can be decomposed into a number of single objective optimization problems.some MOEAs such as MOGLS[5]–[7] and MSOPS[8]adopt this idea to some extent.MOEA/D[9] (MultiObjective Evolutionary Algorithm based on Decomposi-tion)is a very recent evolutionary algorithm for multiobjective optimization using the decomposition idea.It has been applied for solving a number of multiobjective optimization problems [10]–[14].The rest of this paper is organized as follows.Section II introduces a new version of MOEA/D.Section III presents experimental results of MOEA/D on the13unconstrained MOP test instances for CEC2009MOEA competition[15]. Section IV concludes the paper.II.MOEA/DMOEA/D requires a decomposition approach for converting the problem of approximation of the PF into a number of scalar optimization problems.In this paper,we use the Tchebycheff approach.A.Tchebycheff Approach[1]In this approach,the scalar optimization problems are in the formminimize g te(x|λ,z∗)=max1≤i≤m{λi|f i(x)−z∗i|}(2) subject to x∈Ωwhere z∗=(z∗1,...,z∗m)T is the reference point,i. e. z∗i=min{f i(x)|x∈Ω}for each i=1,...,m.Under some mild conditions[1],for each Pareto optimal point x∗,there exists a weight vectorλsuch that x∗is the optimal solution of (2)and each optimal solution of(2)is a Pareto optimal solution of(1).Therefore,one is able to obtain different Pareto optimal solutions by solving a set of single objective optimization problem defined by the Tchebycheff approach with different weight vectors.B.MOEA/D with Dynamical Resource AllocationLetλ1,...,λN be a set of even spread weight vectors and z∗be the reference point.As shown in Section II,the problem of approximation of the PF of(1)can be decomposed into Nscalar optimization subproblems and the objective function of the j-th subproblem is:g te(x|λj,z∗)=max1≤i≤m {λji|f i(x)−z∗i|}(3)whereλj=(λj1,...,λj m)T,and j=1,...,N.MOEA/D minimizes all these N objective functions si-multaneously in a single run.Neighborhood relations among these single objective subproblems are defined based on the distances among their weight vectors.Each subproblem is optimized by using information mainly from its neighboring subproblems.In the versions of MOEA/D proposed in[9]and [10],all the subproblems are treated equally,each of them receives about the same amount of computational effort.These subproblems,however,may have different computational dif-ficulties,therefore,it is very reasonable to assign different amounts of computational effort to different problems.In MOEA/D with Dynamical Resource Allocation(MOEA/D-DRA),the version of MOEA/D proposed in this paper,we define and compute a utilityπi for each subproblem -putational efforts are distributed to these subproblems based on their utilities.During the search,MOEA/D-DRA with the Tchebycheff approach maintains:•a population of N points x1,...,x N∈Ω,where x i is the current solution to the i-th subproblem;•F V1,...,F V N,where F V i is the F-value of x i,i.e.F V i=F(x i)for each i=1,...,N;•z=(z1,...,z m)T,where z i is the best(lowest)value found so far for objective f i;•π1,...,πN:whereπi utility of subproblem i.•gen:the current generation number.The algorithm works as follows:Input:•MOP(1);•a stopping criterion;•N:the number of the subproblems consideredin MOEA/D;•a uniform spread of N weight vectors:λ1,...,λN;•T:the number of the weight vectors in theneighborhood of each weight vector. Output:{x1,...,x N}and{F(x1),...,F(x N)}Step1InitializationStep1.1Compute the Euclidean distances betweenany two weight vectors and thenfind the T clos-est weight vectors to each weight vector.For eachi=1,...,N,set B(i)={i1,...,i T}whereλi1,...,λi T are the T closest weight vectors toλi.Step1.2Generate an initial population x1,...,x Nby uniformly randomly sampling from the searchspace.Step 1.3Initialize z=(z1,...,z m)T by settingz i=min{f i(x1),f i(x2),...,f i(x N)}.Step 1.4Set gen=0andπi=1for all i=1,...,N.Step2Selection of Subproblems for Search:the indexes of the subproblems whose objectives are MOPindividual objectives f i are selected to form initialI.By using10-tournament selection based onπi,select other[N5]−m indexes and add them to I.Step3For each i∈I,do:Step3.1Selection of Mating/Update Range:Uni-formly randomly generate a number rand from(0,1).Then setP=B(i)if rand<δ,{1,...,N}otherwise.Step3.2Reproduction:Set r1=i and randomlyselect two indexes r2and r3from P,and thengenerate a solution¯y from x r1,x r2and x r3by aDE operator,and then perform a mutation operatoron¯y with probability p m to produce a new solutiony.Step3.3Repair:If an element of y is out of theboundary ofΩ,its value is reset to be a randomlyselected value inside the boundary.Step3.4Update of z:For each j=1,...,m,ifz j>f j(y),then set z j=f j(y).Step3.5Update of Solutions:Set c=0and thendo the following:(1)If c=n r or P is empty,go to Step4.Otherwise,randomly pick an index j fromP.(2)If g(y|λj,z)≤g(x j|λj,z),then setx j=y,F V j=F(y)and c=c+1.(3)Delete j from P and go to(1).Step4Stopping Criteria If the stopping criteria is satisfied,then stop and output{x1,...,x N}and{F(x1),...,F(x N)}.Step5gen=gen+1.If gen is a multiplication of50,then compute∆i,the relative decrease of the objective for each sub-problem i during the last50generations,updateπi=1if∆i>0.001;(0.95+0.05∆i0.001)πi otherwise.endifGo to Step2.In10-tournament selection in Step2,the index with the highestπi value from10uniformly randomly selected indexes are chosen to enter I.We should do this selection[N5]−m times.In Step5,the relative decrease is defined asold function value-new function valueold function valueIf∆i is smaller than0.001,the value ofπi will be reduced. In the DE operator used in Step3.2,each element¯y k in ¯y=(¯y1,...,¯y n)T is generated as follows:¯y k=x r1k+F×(x r2k−x r3k)with probability CR,x r1k,with probability1−CR,(4) where CR and F are two control parameters.The mutation operator in Step 3.2generates y =(y 1,...,y n )T from ¯y in the following way:y k =¯y k +σk ×(b k −a k )with probability p m ,¯y k with probability 1−p m ,(5)withσk =(2×rand )1η+1−1if rand <0.5,1−(2−2×rand )1η+1otherwise,where rand is a uniformly random number from [0,1].The distribution index ηand the mutation rate p m are two control parameters.a k and b k are the lower upper bounds of the k -th decision variable,respectively.III.E XPERIMENTAL R ESULTSMOEA/D has been tested on all the 13unconstrained test instances in CEC 2009[15].The parameter settings are as follows:•N :600for two objectives,1000for three objectives,and 1500for five objectives;•T =0.1N and n r =0.01N ;•δ=0.9;•In DE and mutation operators:CR=1.0and F=0.5,η=20and p m =1/n .•Stopping condition:the algorithm stops after 300,000function evaluations for each test instance.A set of N weight vectors W are generated using as follows:1)Uniformly randomly generate 5,000weight vectors for forming the set W 1.W is initialize as the set containing all the weight vectors (1,0,...,0,0),(0,1,...,0,0),...,(0,0,...,0,1).2)Find the weight vector in W 1with the largest distance to W ,add it to W and delete it from W 1.3)If the size of W is N ,stop and return W .Otherwise,go to 2).In calculating the IGD values,100nondominated solutions selected from each final population were used in the case of two objectives,150in the case of three objectives and 800in the case of five objectives.The final solution set A is selected from the output O ={F (x 1),...,F (x N )}of the algorithm is as follows:•For the instances with two objectives,the set 100final solutions are the solution set consisting of the best solutions in O for the subproblems with weights (0,1),(1/99,98/99)...,(98/99,1/99),(1,0).•For the instances with more than two objectives:1)Randomly select an element e from O and set O 1=O \{e }and A ={e }.2)Find the element in O 1with the largest distance to A ,and delete it from O 1and add it to A .3)If the size of A is 150for three objectives and 800for five objectives,stop.Otherwise,go to 2).The experiments were performed on a 1.86GHz Intel PC with 2GB RAM.The programming languages are MATLAB and C++.The IGD values are listed in table I.The distributions of the final populations with the lowest IGD values among theTABLE IT HE IGD STATISTICS B ASED ON 30INDEPENDENT RUNS Test InstancesMean Std Best Worst UF010.004350.000290.003990.00519UF020.006790.001820.004810.01087UF030.007420.005890.003940.02433UF040.063850.005340.056870.08135UF050.180710.068110.080280.30621UF060.005870.001710.003420.01005UF070.004440.001170.004050.01058UF080.058400.003210.050710.06556UF090.078960.053160.035040.14985UF100.474150.073600.364050.64948R2DTLZ2M50.110320.002330.106920.11519R2DTLZ3M5146.781341.828166.1690214.2261WFG1M51.84890.01981.83461.899330runs for the first 10test instances are plotted in figures 1-10.For seven biobjective instances,MOEA/D found good ap-proximations to UF1,UF2,UF3,UF6and UF7but performed poorly on UF4and UF5.For three 3-objective instances,MOEA/D had better performance on UF8than the other two.For three 5-objective instances,the IGD value found by MOEA/D on R2-DTLZ3-M5was very large while those on R2-DTLZ2-M5and WFG1-M5were smaller.IV.C ONCLUSIONThis paper described the basic idea and framework of MOEA/D.A dynamic computational resource allocation strat-egy was proposed.It was tested on the 13unconstrained instances for CEC09algorithm competition.The source code of the algorithm can be obtained from its authors.Fig.1.The best approximation to UF1Fig.2.The best approximation to UF2Fig.3.The best approximation to UF3R EFERENCES[1]K.Miettinen,Nonlinear Multiobjective Optimization .Kluwer Aca-demic Publishers,1999.[2]K.Deb,S.Agrawal,A.Pratap,and T.Meyarivan,“A fast and elitistmultiobjective genetic algorithm:NSGA-II,”IEEE Trans.Evolutionary Computation ,vol.6,no.2,pp.182–197,2002.[3] E.Zitzler,umanns,and L.Thiele,“SPEA2:Improving thestrength pareto evolutionary algorithm for multiobjective optimization,”Fig.4.The best approximation to UF4Fig.5.The best approximation to UF5in Evolutionary Methods for Design Optimization and Control with Applications to Industrial Problems ,K.C.Giannakoglou,D.T.Tsahalis,J.P´e riaux,K.D.Papailiou,and T.Fogarty,Eds.,Athens,Greece,2001,pp.95–100.[4]J.D.Knowles and D.W.Corne,“The pareto archived evolution strategy:A new baseline algorithm for multiobjective optimisation,”in Proc.of Congress on Evolutionary Computation (CEC’99),Washington D.C.,1999,pp.98–105.[5]H.Ishibuchi and T.Murata,“Multiobjective genetic local search algo-Fig.7.The best approximation to UF7rithm and its application toflowshop scheduling,”IEEE Transactions on Systems,Man and Cybernetics,vol.28,no.3,pp.392–403,1998. [6] A.Jaszkiewicz,“On the performance of multiple-objective genetic localsearch on the0/1knapsack problem-a comparative experiment,”IEEE Trans.Evolutionary Computation,vol.6,no.4,pp.402–412,Aug.2002.[7]H.Ishibuchi,T.Yoshida,and T.Murata,“Balance between geneticsearch and local search in memetic algorithms for multiobjective per-mutationflowshop scheduling,”IEEE Trans.Evolutionary Computation, vol.7,no.2,pp.204–223,Apr.2003.2678–2684.[9]Q.Zhang and H.Li,“MOEA/D:A multiobjective evolutionary algorithmbased on decomposition,”IEEE Transactions on Evolutionary Compu-tation,vol.11,no.6,pp.712–731,2007.[10]H.Li and Q.Zhang,“Multiobjective optimization problems with com-plicated pareto set,MOEA/D and NSGA-II,”IEEE Transactions on Evolutionary Computation,2009,in press.[11]P.C.Chang,S.H.Chen,Q.Zhang,and J.L.Lin,“MOEA/D forflowshop scheduling problems,”in Proc.of Congress on Evolutionary Computation(CEC’08),Hong Kong,2008,pp.1433–1438.[12]W.Peng,Q.Zhang,and H.Li,“Comparision between MOEA/D andNSGA-II on the multi-objective travelling salesman problem,”in Multi-Objective Memetic Algorithms,ser.Studies in Computational Intelli-gence,C.-K.Goh,Y.-S.Ong,and K.C.Tan,Eds.Heidelberg,Berlin:Fig.10.The best approximation to UF10Springer,2009,vol.171.[13]Q.Zhang,W.Liu,E.Tsang,and B.Virginas,“Expensive multiobjectiveoptimization by MOEA/D with gaussian process model,”Technical Report CES-489,the School of Computer Science and Electronic Engineering,University of Essex,Tech.Rep.,2009.[14]H.Ishibuchi,Y.Sakane,N.Tsukamoto,and Y.Nojima,“Adaptationof scalarizing functions in MOEA/D:An adaptive scalarizing function-based multiobjective evolutionary algorithm,”in Proc.of the5th Interna-tional Conference devoted to Evolutionary Multi-Criterion Optimization (EMO’09),Nantes,France,Apr.2009.[15]Q.Zhang,A.Zhou,S.Zhao,P.N.Suganthan,W.Liu,and S.Tiwari,“Mmultiobjective optimization test instances for the CEC2009sepcial session and competition,”Technical Report CES-487,The Shool of Computer Science and Electronic Engineering,University of Essex, Tech.Rep.,2008.。
2013-Decomposition of a Multiobjective Optimization Problem into a Number of Simple Multiobjective

I. I NTRODUCTION This letter considers the following continuous multiobjective optimization problem (MOP): minimize F (x) = (f1 (x), . . . , fm (x)) n ∏ subject to x∈ [ai , bi ] ∏n
Abstract—This letter suggests an approach for decomposing a multiobjective optimization problem (MOP) into a set of simple multiobjective optimization subproblems. Using this approach, it proposes MOEA/D-M2M, a new version of multiobjective optimization evolutionary algorithm based decomposition. This proposed algorithm solves these subproblems in a collaborative way. Each subproblem has its own population and receives computational effort at each generation. In such a way, population diversity can be maintained, which is critical for solving some MOPs. Experimental studies have been conducted to compare MOEA/D-M2M with classic MOEA/D and NSGA-II. This letter argues that population diversity is more important than convergence in multiobjective evolutionary algorithms for dealing with some MOPs. It also explains why MOEA/D-M2M performs better. Keywords-Multiobjective optimization, decomposition, hybrid algorithms
Optimization Algorithms

Optimization AlgorithmsOptimization algorithms are a crucial tool in the field of mathematics, computer science, engineering, and various other disciplines. These algorithms are designed to find the best solution to a problem from a set of possible solutions, often within a specific set of constraints. The application of optimization algorithms is vast, ranging from solving complex mathematical problems to optimizing the performance of real-world systems. In this response, we will delve into the significance of optimization algorithms, their various types, real-world applications, challenges, and future prospects. One of the most prominent types of optimization algorithms is the evolutionary algorithm, which is inspired by the process of natural selection. These algorithms work by iteratively improving a population of candidate solutions through processes such as mutation, recombination, and selection. Evolutionary algorithms have been successfully applied in various domains, including engineering design, financial modeling, and data mining. Their ability to handle complex, multi-modal, and non-linear optimization problems makes them particularly valuable in scenarios where traditional algorithms may struggle to find optimal solutions. Another important type of optimization algorithm is the gradient-based algorithm, which operates by iteratively moving towards the direction of steepest descent in the search space. These algorithms are widely used in machine learning, optimization of neural networks, and various scientific and engineering applications. Gradient-based algorithms, such as the popular gradient descent algorithm, have proven to be highly effective in finding optimal solutions for differentiable and smooth objective functions. However, they may face challenges in dealing with non-convex and discontinuous functions, and can get stuck in local optima. Real-world applications of optimization algorithms are diverse and impactful. In the field of engineering, these algorithms are used for optimizing the design of complex systems, such as aircraft, automobiles, and industrial processes. They are also employed in logistics and supply chain management to optimize transportation routes, inventory management, and scheduling. In finance, optimization algorithms are utilized for portfolio optimization, risk management, and algorithmic trading. Furthermore, these algorithms play a crucial role in healthcare for treatmentplanning, resource allocation, and disease modeling. The wide-ranging applications of optimization algorithms underscore their significance in solving complex real-world problems. Despite their widespread use and effectiveness, optimization algorithms are not without challenges. One of the primary challenges is the need to balance exploration and exploitation in the search for optimal solutions. Many algorithms may struggle to strike the right balance, leading to premature convergence or excessive exploration, which can hinder their performance. Additionally, the scalability of optimization algorithms to handle high-dimensional and large-scale problems remains a significant challenge. As the complexity of problems increases, the computational resources required for optimization also grow, posing practical limitations in many applications. Looking ahead, the future of optimization algorithms holds great promise. With advancements in computational power, parallel processing, and algorithmic innovations, the capabilities of optimization algorithms are expected to expand significantly. The integration of optimization algorithms with artificial intelligence and machine learning techniques is likely to open new frontiers in autonomous optimization, adaptive algorithms, and self-learning systems. Moreover, the increasing emphasis on sustainability and resource efficiency is driving the development of optimization algorithms for eco-friendly designs, renewable energy management, and sustainable urban planning. In conclusion, optimization algorithms are indispensable tools for solving complex problems across diverse domains. Their ability to find optimal solutions within specified constraints makes them invaluable in engineering, finance, healthcare, and many other fields. While they face challenges such as balancing exploration and exploitation and scalability to high-dimensional problems, ongoing research and technological advancements are poised to enhance their capabilities. The future holds exciting prospects for optimization algorithms, as they continue to evolve and contribute to addressing the complex challenges of the modern world.。
5G无线侧术语释义

数字2G 2nd Generation ,第二代移动通信系统。
3G3rd Generation,第三代移动通信系统。
4G 4th Generation ,第四代移动通信系统。
5G5th Generation ,第五代移动通信系统。
3DES Triple Data Encryption Standard ,三重数据加密标准。
3DES (即Triple DES )是DES 向AES 过渡的加密算法(1999年,NIST将3DES 指定为过渡的加密标准),是DES 的一个更安全的变形。
3DES 是DES 加密算法的一种模式,它使用3条56位的密钥对数据进行三次加密。
3GPP Third Generation Partnership Project ,第三代合作伙伴计划。
成立于1998年,由许多国家和地区的电信标准化组织共同组成,是一个具有广泛代表性的国际标准化组织,是3G 技术的重要制定者。
它存在的意义,就是为了协调成员之间的矛盾,制定规则和契约。
5GC5G Core Network ,5G 核心网。
5G NSA 5G Non-Standalone ,5G 非独立组网。
5G 不能直接连核心网,通过4G 控制面接入,再通过双连接的方式使用户面在4G 和5G 分流。
5G SA 5G Standalone ,5G 独立组网。
采用端到端的5G 网络架构,从终端、无线新空口到核心网都采用5G相关标准,支持5G 各类接口,实现5G 各项功能,提供5G 类服务。
5G RAN5G Radio Access Network ,5G 接入网。
5QI 5G QoS Identifier ,5G QoS 指示符。
5G 无线侧术语大全本资料仅供学习交流,不作商业用途。
扫码关注5G新技术,获取更多5G学习资料802.1x基于客户端/服务器的访问控制和认证协议。
它可以限制未经授权的用户/设备通过接入端口访问LAN/WLAN。
当客户端与AP关联后,是否可以使用AP提供的无线服务要取决于802.1x的认证结果。
博弈论模型用到的算法

博弈论模型用到的算法Game theory is a mathematical tool used to study rational decision-making in competitive situations. It can be applied in various fields such as economics, political science, and biology. One of the most famous algorithms in game theory is the Nash equilibrium, named after mathematician John Nash. Nash equilibrium is a concept in which each player in a game makes the best possible decision given the decisions of the other players. It is a fundamental concept in game theory and has been widely used to analyze strategic interactions between rational individuals.博弈论是一种用于研究竞争情况下理性决策的数学工具。
它可以应用于经济学、政治科学和生物学等各个领域。
在博弈论中最著名的算法之一是纳什均衡,以数学家约翰·纳什命名。
纳什均衡是一个概念,在这个概念中,每个游戏参与者都在其他参与者的决策下做出最佳可能的决策。
这是博弈论的一个基本概念,被广泛用来分析理性个体之间的战略互动。
When analyzing a strategic game using the Nash equilibrium concept, players are assumed to be rational decision-makers who aim to maximize their own utility. The concept of Nash equilibriumprovides a way to analyze how a strategic game will play out when each player knows the strategies chosen by the others. It helps to predict the likely outcomes of a game and identify the strategies that players are likely to adopt.在使用纳什均衡概念分析战略游戏时,假定玩家是理性的决策者,目的是最大化自己的效用。
基于分组策略的多目标三维装箱算法

包装工程第44卷第21期·204·PACKAGING ENGINEERING2023年11月收稿日期:2023-02-07 基于分组策略的多目标三维装箱算法张长勇,吴刚鑫(中国民航大学电子信息与自动化学院,天津300300)摘要:目的针对现有三维装箱算法优化目标单一、优化效率低的问题,提出适用于求解大规模货物装载问题的多目标装箱算法,以提高装箱规划效率,确保货物运输安全。
方法考虑5种现实约束条件,以体积利用率和装载垛型重心偏移量为优化目标,建立多目标货物装载优化模型。
采用拟人式装箱对货物进行预分组,减小决策空间,然后结合分组信息与装箱算法生成初始解;引入数据驱动的装箱交叉算子提高算法收敛性;设计多策略变异算子提高算法结果的多样性。
结果以公共数据集和真实航空货物数据作为实验数据进行实验。
实验结果表明,在满足多种约束条件下,集装箱装载强异构货物平均体积利用率达到92.0%,重心位置空间偏移从20 cm减少到7.5 cm,并且算法运行时间减少了73.5%。
结论本文所提算法应用于求解大规模多目标三维装箱问题,提高了装箱质量和效率,可为三维装箱算法的工程应用提供参考。
关键词:三维装箱;多目标优化;组合优化;多变异策略中图分类号:TP301;TP311 文献标识码:A 文章编号:1001-3563(2023)21-0204-10DOI:10.19554/ki.1001-3563.2023.21.025Multi-objective 3D Packing Algorithm Based on Grouping StrategyZHANG Chang-yong, WU Gang-xin(School of Electronic Information and Automation, Civil Aviation University of China, Tianjin 300300, China)ABSTRACT:The work aims to propose a multi-objective packing algorithm suitable for large-scale cargo loading to solve the problems of single optimization objective and low optimization efficiency of existing 3D packing algorithms, so as to improve the efficiency of packing planning and ensure the safety of cargo transportation. Firstly, considering five realistic constraints, a multi-objective cargo loading optimization model was established with the volume utilization and the shift of the center of gravity of the loading layout as the optimization objectives. Then, the cargoes were pre-grouped by anthropomorphic packing to reduce the decision space, and the initial solutions were generated by combining the grouping information with the packing algorithm; A data-driven cross operator was introduced to packing to improve the convergence of the algorithm; Multi-strategy mutation operators were designed to improve the diversity of algorithm results. With the public data set and real air cargo data as the experimental data, the experimental results showed that the average volume utilization rate of strongly heterogeneous cargoes in container loading reached 92.0%. The space offset of the center of gravity position was reduced from 20 cm to 7.5 cm. And the running time of the algorithm was reduced by 73.5% under various constraints. Therefore, the algorithm proposed in this paper is applied to solve the large-scale multi-objective three-dimensional packing problem, which improves the packing quality and efficiency, and can provide reference for the engineering application of the three-dimensional packing algorithm.KEY WORDS: three-dimensional packing; multi-objective optimization; combinatorial optimization; multiple mutationstrategy第44卷 第21期 张长勇,等:基于分组策略的多目标三维装箱算法 ·205·近年来,随着我国的经济总量和对外贸易水平的逐步提升,货物运输量逐年增加。
基于博弈建模的地对空防御火力分配策略选择

第42卷第5期2023年10月沈㊀阳㊀理㊀工㊀大㊀学㊀学㊀报JournalofShenyangLigongUniversityVol 42No 5Oct 2023收稿日期:2022-09-08基金项目:辽宁省教育厅科学研究经费项目(LG202025ꎬLJKZ0260)ꎻ辽宁省 兴辽英才计划 项目(XLYC2006017)作者简介:孙文娟(1982 )ꎬ女ꎬ副教授ꎬ研究方向为智能优化算法㊁生产物流与优化ꎮ通信作者:宫华(1976 )ꎬ女ꎬ教授ꎬ博士ꎬ研究方向为智能防御㊁生产物流与优化ꎮ数理应用文章编号:1003-1251(2023)05-0082-06基于博弈建模的地对空防御火力分配策略选择孙文娟1ꎬ2ꎬ许㊀可1ꎬ2ꎬ宫㊀华1ꎬ2(1.沈阳理工大学理学院ꎬ沈阳110159ꎻ2.辽宁省兵器工业智能优化与控制重点实验室ꎬ沈阳110159)摘㊀要:战场环境复杂多变ꎬ如何根据当前态势及火力资源特点ꎬ及时有效地对来袭目标进行火力分配ꎬ是防空指挥中的关键环节ꎮ针对地对空防御问题ꎬ考虑对敌方来袭目标的毁伤程度和我方武器资源消耗因素ꎬ以最大化总体毁伤概率和最小化使用武器价值为目标建立多目标优化模型ꎮ由于优化目标之间存在对武器资源的竞争ꎬ以优化目标为博弈方ꎬ以决策武器如何攻打来袭目标为策略ꎬ建立非合作博弈模型ꎬ并结合禁忌搜索技术ꎬ设计基于纳什均衡搜索的改进遗传算法(NE ̄IGA)进行求解ꎮ实验结果表明ꎬ与求解优化模型的基于禁忌搜索的改进遗传算法(TSGA)及基本遗传算法(GA)相比ꎬ博弈模型及其求解算法NE ̄IGA能够得到更优的分配方案ꎮ关㊀键㊀词:地对空防御ꎻ火力分配ꎻ非合作博弈ꎻ纳什均衡ꎻ遗传算法中图分类号:O225ꎻE911文献标志码:ADOI:10.3969/j.issn.1003-1251.2023.05.013Ground ̄to ̄airDefenseFirepowerAssignmentDecisionBasedonGameModelingSUNWenjuan1ꎬ2ꎬXUKe1ꎬ2ꎬGONGHua1ꎬ2(1.ShenyangLigongUniversityꎬShenyang110159ꎬChinaꎻ2.LiaoningKeyLaboratoryofIntelligentOptimizationandControlforOrdnanceIndustryꎬShenyang110159ꎬChina)Abstract:Forthecomplexandchangeableenvironmentofthebattlefieldꎬtimelyandeffectivefirepowerassignmenttoincomingtargetsaccordingtothesituationandcharacteristicsofthefireresourcesiscrucialtotheairdefensecommand.Consideringthedegreeofdamagetotheincomingtargetsandtheconsumptionofweaponresourcesintheground ̄to ̄airdefenseꎬamulti ̄objectiveoptimizationmodelisproposedtomaximizethetotaldamageprobabilitywithminimizedconsumptionofweapons.Forthecompetitionbetweenthetwoobjectivesforweaponresourcesꎬanon ̄cooperativegamemodelisproposedforthefirepowerassignmentwithobjectivesasplayersꎬandthedecisiontoattacktargetswithweaponsasastrategy.Animprovedgeneticalgorithm(NE ̄IGA)basedontabusearchtechnologyisdesignedtosolvetheNashequilibrium.Theexperimentalresultsshowthatꎬcomparedwiththeimprovedgeneticalgorithmbasedontabusearch(TSGA)andthebasicgeneticalgorithm(GA)whichareusedforsolvingtheoptimizationmodelꎬthegamemodelandtheproposedalgorithmNE ̄IGAcanbringabetterassignmentscheme.Keywords:ground ̄to ̄airdefenseꎻfirepowerassignmentꎻnon ̄cooperativegameꎻNashequi ̄libriumꎻgeneticalgorithm㊀㊀火力分配是指根据作战目标㊁战场态势㊁武器性能等因素ꎬ将不同类型和一定数量的火力单元针对来袭目标以某种准则进行分配ꎬ以有效攻击敌方目标的过程ꎮ在地对空防御体系中ꎬ火力分配是决定作战效果的关键因素ꎬ其任务是针对多个来袭目标ꎬ防御方能及时有效地分配防御武器ꎬ消除敌方威胁ꎬ使防御方所遭受的损失减少到最小[1]ꎮ在火力分配问题的解决方案中ꎬ主要考虑的优化目标包括整体打击效能最大[2]㊁防御方资源损失最小[3]㊁来袭目标生存概率最小[4]以及被保护资产存留价值最大[5]等ꎮ采用的优化方法主要包括近似动态规划方法[6]ꎬ混合遗传算法[7]ꎬ蚁群算法[8]㊁蜂群算法[9]㊁布谷鸟搜索算法[10]㊁生物地理学优化[11]等智能优化算法ꎮ在火力分配问题中ꎬ攻击方和防御方之间往往存在着利益冲突ꎮ对于某一方来说ꎬ不同优化目标之间也存在着对武器资源的竞争ꎬ而优化模型很难考虑各竞争主体之间的冲突关系ꎮ非合作博弈理论主要用于解决有约束㊁多人多目标且目标函数相互矛盾的决策问题ꎬ是研究具有竞争现象的理论和方法ꎬ因此非合作博弈建模是解决多目标火力分配问题的有效工具ꎮ针对火力分配中的竞争问题ꎬ大多以攻防双方为博弈方ꎬ考虑不同的收益函数ꎬ基于博弈理论建立相应的火力分配模型ꎮ张毅等[12]㊁Galati[13]㊁马飞等[14]分别以作战效能㊁目标毁伤概率㊁目标生存价值为收益ꎬ建立火力分配非合作博弈模型ꎬ采用启发式遗传-蚁群优化算法及邻域搜索算法进行求解ꎮ曾松林等[15]㊁周兴旺等[16]针对火力资源分配问题ꎬ分别建立动态博弈模型及贝叶斯混合博弈模型ꎬ利用混合粒子群算法求解纳什均衡ꎮ针对多目标火力分配问题ꎬ赵玉亮等[17]㊁Leboucher等[18]分别建立了双矩阵博弈模型及演化博弈模型ꎬ采用粒子群算法求解ꎮ综上可知ꎬ在利用博弈理论研究火力分配问题时ꎬ考虑攻防双方之间竞争现象的较多ꎮ而在多目标火力分配问题中ꎬ各优化目标之间同样存在对武器资源的竞争ꎬ利用博弈理论研究多目标火力分配问题ꎬ通过纳什均衡分配方案ꎬ使目标之间的博弈策略实现最优ꎬ可以在保证作战效能的同时ꎬ得到满足多方利益的均衡火力分配方案ꎮ本文针对地对空防御中的火力分配问题ꎬ以最大化总体毁伤概率和最小化使用武器价值为优化目标ꎬ通过将优化目标映射为博弈方建立非合作博弈模型ꎬ结合禁忌搜索技术设计改进遗传算法NE ̄IGA寻求纳什均衡解ꎬ从而获得使优化目标间达到均衡的地对空防御火力分配决策方案ꎮ1㊀火力分配问题描述在地对空防御火力分配问题中ꎬ一般包含空中进攻和地面防御两种力量ꎬ分别记为敌方和我方ꎮ假设在某次作战中ꎬ敌方有n个空中来袭目标攻击我方阵地ꎬ我方防御阵地中有r种武器单元ꎬ第i(i=1ꎬ2ꎬ ꎬr)种武器单元中有mi个武器可用于防御ꎬ且不同性能的武器具有不同的作战效能ꎮ并进一步假设如下:1)每个武器只能攻打一个来袭目标ꎬ每个来袭目标可以被多个武器攻打ꎻ2)同种武器对同一来袭目标的毁伤概率相同ꎻ3)我方武器可以精准打击在攻击能力范围内的来袭目标ꎮ火力分配的任务是为各个来袭目标分配武器ꎬ达成在武器资源使用较少的基础上毁伤效果最好的结果ꎮ相关参数及变量说明见表1ꎮ本文利用毁伤概率衡量火力分配方案的毁伤效果ꎬ在满足作战要求的前提下ꎬ通过攻击空中来袭目标ꎬ使其毁伤概率达到最大ꎬ同时最小化我方38第5期㊀㊀㊀㊀㊀孙文娟等:基于博弈建模的地对空防御火力分配策略选择武器资源的价值ꎮ因此ꎬ目标函数描述为表1㊀参数及变量说明表符号名称及说明i武器单元索引ꎬi=1ꎬ2ꎬK?ꎬrj来袭目标索引ꎬj=1ꎬ2ꎬK?ꎬnTj第j个来袭目标qj来袭目标Tj的威胁度Wi第i种武器单元mi武器单元Wi中的武器总数k武器单元Wi中武器索引ꎬk=1ꎬ2ꎬK?ꎬmiWik武器单元Wi中的第k个武器vik武器Wik的价值pikꎬj武器Wik对目标Tj的毁伤概率p毁伤概率下限likꎬj描述Tj是否在Wik的攻击能力范围内ꎮ如果是ꎬlikꎬj=1ꎻ否则ꎬlikꎬj=0xikꎬj决策变量ꎬ描述武器Wik是否攻打目标Tjꎮ如果是ꎬxikꎬj=1ꎻ否则ꎬxikꎬj=0㊀maxf1=ðnj=1qj[1-ᵑri=1ᵑmik=1(1-likꎬjpikꎬj)xikꎬj](1)minf2=ðnj=1ðri=1ðmik=1vikxikꎬj(2)式中:f1为对所有来袭目标的总毁伤概率ꎻf2为使用武器的总价值ꎮ为保障攻击效果ꎬ在我方有一定数量武器的前提下ꎬ要求总毁伤概率不低于pꎬ因此模型应满足以下约束ꎬ其中i=1ꎬ2ꎬ ꎬrꎮðnj=1xikꎬjɤ1(3)ðnj=1ðmik=1xikꎬjɤmi(4)f1ȡp(5)2㊀火力分配问题博弈模型考虑到来袭目标的总体毁伤概率和使用武器的总价值两个目标函数之间存在着对武器资源的竞争ꎬ本文利用非合作博弈建模方法求解多目标优化问题ꎮ以两个目标函数作为博弈方ꎬ分别表示为毁伤概率P和武器价值Vꎬ建立非合作博弈模型G={PꎬVꎻS1ꎬS2ꎻU1ꎬU2}ꎬ其中S1㊁S2分别表示博弈方P和V的策略集ꎬU1㊁U2分别表示博弈方P和V的收益ꎮ1)策略及策略组合ꎮ令s1表示博弈方P对部分武器单元的决策ꎬs2表示博弈方V对剩余部分武器单元的决策ꎬ构成策略组合sꎬs=(s1ꎬs2)ꎬ其中s1ɪS1ꎬs2ɪS2ꎮ策略组合s对应一个火力分配方案{X1ꎬX2ꎬ ꎬXr}ꎬ其中Xi(i=1ꎬ2ꎬK?ꎬr)表示博弈方对第i种武器单元的决策ꎬ用miˑn阶矩阵表示为Xi=xi1ꎬ1xi1ꎬ2 xi1ꎬnxi2ꎬ1xi2ꎬ2 xi2ꎬnximiꎬ1ximiꎬ2 ximiꎬnæèçççççöø÷÷÷÷÷miˑn(6)满足式(3)~(5)的策略组合为可行策略组合ꎬ所有可行策略组合s的集合等价于多目标优化问题的可行域ꎮ2)收益函数ꎮ为了统一博弈方收益的优化方向ꎬ令U1=f1ꎬU2=-f2ꎮ3)纳什均衡ꎮ在博弈G={PꎬVꎻS1ꎬS2ꎻU1ꎬU2}中ꎬ如果对任一博弈方K(K=1ꎬ2)ꎬ策略组合(s∗Kꎬs∗-K)满足UK(s∗Kꎬs∗-K)ȡUK(sKꎬs∗-K)ꎬ∀sKɪSK(7)那么s∗=(s∗Kꎬs∗-K)为博弈G的一个纳什均衡ꎬ其中s∗K为博弈方K的策略ꎬs∗-K为另一博弈方策略ꎮ基于地对空防御火力分配问题非合作博弈模型ꎬ将多目标优化问题转化为满足式(7)的纳什均衡的求解ꎮ3㊀改进遗传算法求解纳什均衡当来袭目标和防御武器数量较多时ꎬ由于解空间较大ꎬ根据式(7)利用定义求解纳什均衡比较困难ꎮ遗传算法(GA)以其全局寻优㊁鲁棒性强等特点ꎬ被广泛应用于各个领域ꎬ但在进化后期ꎬ收敛速度较慢ꎬ容易陷入局部最优ꎮ而禁忌搜索的核心思想是标记对应已搜索的局部最优解的对象ꎬ并在以后的迭代搜索中尽量避开ꎬ从而保证多样化的有效搜索[19]ꎮ因此ꎬ本文结合禁忌搜索技术设计基于纳什均衡的改进遗传算法NE ̄IGA求解火力分配问题的博弈模型ꎬ从而避免算法早熟收敛ꎬ优化算法性能ꎮ3.1㊀编码与解码针对地对空防御火力分配问题ꎬ采用实数编码表示待优化问题的解ꎮ将各武器按照武器单元48沈㊀阳㊀理㊀工㊀大㊀学㊀学㊀报㊀㊀第42卷顺序编号ꎬ设武器总数为mꎬ来袭目标总数为nꎬ用(c1ꎬc2ꎬ ꎬcm)表示火力分配问题的一个方案ꎮ其中ck(k=1ꎬ2ꎬ ꎬm)为0~n的整数ꎬck=0表示第k个武器不攻打ꎬck=j(j=1ꎬ2ꎬ ꎬn)表示第k个武器攻打第j个来袭目标ꎮ如有两个武器单元ꎬ共有6个武器ꎬ武器数量分别为2和4ꎬ则个体编码(2ꎬ3ꎬ0ꎬ1ꎬ4ꎬ3)中的基因 2 表示武器单元1中的第1个武器攻打第2个来袭目标ꎻ基因 0 表示武器单元2中的第1个武器不攻打任何来袭目标ꎮ3.2㊀适应度函数多目标博弈中的纳什均衡ꎬ每一个优化目标的决策都是给出其他优化目标策略后的最佳策略ꎮ纳什均衡求解算法的主要目的是使各优化目标尽可能地逼近自己的最优解ꎬ并且不损害其他优化目标的利益ꎮ为求解博弈模型的纳什均衡ꎬ定义NJ为NJ=maxf1-fJ1maxf1+fJ2-minf2minf2(8)式中:NJ为判断第J个个体是否为纳什均衡的指标ꎻfJ1和fJ2分别为当前种群中个体J的毁伤概率和武器价值ꎻmaxf1和minf2分别为各单目标下的最优毁伤概率及最优武器价值ꎮ当fJ1越接近maxf1ꎬfJ2越接近minf2时ꎬ第J个个体对应的NJ就会越小ꎮ此时ꎬ每一个目标函数都在试图逼近其最优值ꎬ并且任一目标函数都不能单独决定多目标问题的解ꎮ寻求NJ的最小值ꎬ就等价于寻求纳什均衡ꎮ令Nbest=minJNJꎬ在遗传算法每一次迭代时ꎬ寻找每一代的近似纳什均衡Nbest及满足NJ-Nbest<ε的NJ(其中ε是反映接近程度的纳什均衡因子)ꎮ由于NJ越小越接近纳什均衡值ꎬ因此令f=-NJꎬ将其作为遗传算法中的适应度函数ꎮ3.3㊀NE ̄IGA基本流程3.3.1㊀初始化参数初始化问题及算法参数ꎬ其中火力分配问题参数:武器个数mꎬ来袭目标数nꎬ优化目标f1和f2ꎻ遗传算法参数:种群大小Posꎬ最大迭代次数MIꎬ交叉概率Pcꎬ相似度tꎬ纳什均衡因子εꎮ按照编码规则随机生成Pos个初始个体ꎮ3.3.2㊀选择算子采用二元锦标赛选择操作ꎬ在当前种群中随机选择两个个体ꎬ将适应度值大的个体放入下一代种群ꎬ较小的放回原种群ꎬ以参加下一次选择ꎮ3.3.3㊀交叉算子为避免基本遗传算法容易早熟的缺点ꎬ采用两点交叉方式ꎬ并利用禁忌搜索技术改进交叉操作ꎬ产生子代个体ꎮ1)在0和1之间生成随机数rand(0ꎬ1)ꎬ若rand(0ꎬ1)小于交叉概率Pcꎬ进行两点交叉ꎬ即随机选择两个交叉点ꎬ交换两个父代个体中位于交叉点之间的部分基因ꎬ生成两个子代个体ꎻ否则不进行ꎮ2)禁忌搜索获取子代个体ꎮ以父代个体的平均适应度值作为期望水平ꎬ将父代个体的适应度值作为禁忌对象存在禁忌表中ꎮ若子代个体的适应度值大于期望水平ꎬ则保留该子代个体ꎻ若小于期望水平ꎬ查看禁忌表中是否有此适应度值ꎬ如没有ꎬ保留该子代个体ꎬ否则选择适应度值高的父代个体替代该子代个体ꎮ3.3.4㊀变异算子采用均匀变异方式ꎮ应用相似度在个体长度中的占比判断是否进行变异操作ꎮ相似度是指两个个体相同位置处编码相同的个数ꎬ若相似度在整个编码中占比大于tꎬ则随机生成需变异的个体位置进行变异操作ꎮNE ̄IGA流程如图1所示ꎬ其中I为当前迭代次数ꎮ4㊀实验仿真4.1㊀实验环境及参数设置本节通过实例验证求解火力分配问题的博弈建模方法及NE ̄IGA的可行性和有效性ꎮ实验采用Windows10操作系统㊁PyCharmCommunityE ̄dition2020.3x64编译环境㊁Python3.8语言编程实现ꎮ假设我方有5种武器单元ꎬ包括:GPS/毫米波W1ꎬ诱饵弹/箔条W2ꎬ烟雾弹W3ꎬ防空导弹W4以及高炮W5ꎬ各武器单元的武器价值和数量如表2所示ꎮ有10个敌方来袭目标ꎬ包括两枚BGM ̄109C 战斧 式巡航导弹T1㊁T2ꎬ两台F ̄16C战斗机T3㊁T4ꎬ1枚AGM ̄86巡航导弹T5ꎬ1架MQ ̄9 死神 无人机T6ꎬ两架AH ̄64A 阿帕奇 直升机T7㊁T8ꎬ1架F ̄22隐形战斗机T9和1架B ̄52H战略轰58第5期㊀㊀㊀㊀㊀孙文娟等:基于博弈建模的地对空防御火力分配策略选择炸机T10ꎬ敌方来袭目标的威胁度如表3所示ꎬ各武器对不同来袭目标的毁伤概率如表4所示ꎮ图1㊀NE ̄IGA流程图表2㊀我方武器价值及数量武器单元W1W2W3W4W5单位价值0.40.30.210.7数量8561514表3㊀敌方来袭目标的威胁度表4㊀各武器对各来袭目标的毁伤概率来袭目标武器单元W1W2W3W4W5T1㊁T20.0000.1000.1570.9560.821T3㊁T40.0000.0800.1020.9270.742T50.8610.5200.4230.9000.814T60.0000.1100.1230.9130.800T7㊁T80.0000.0700.2100.9230.780T90.8520.8570.8040.8740.730T100.0000.1200.1150.9100.798㊀㊀本例中ꎬ设置参数Pos=30㊁MI=60㊁Pc=0.9㊁t=0.94㊁ε=0.01ꎻ结合武器单元种类及数量ꎬ设置毁伤概率下限p=0.9ꎮ4.2㊀实验结果及分析为验证本文提出算法NE ̄IGA的有效性ꎬ将多目标优化模型中目标函数f1和f2采用线性加权方式变为单目标ꎬ由于两个目标优化方向不同ꎬ将其权重分别取相反数ꎬ并将加权后的单目标作为适应度函数ꎬ比较基于禁忌搜索改进的遗传算法(TSGA)及基本遗传算法(GA)求解结果ꎮ其中TSGA是在GA的基础上ꎬ利用禁忌搜索技术改进交叉算子ꎬ改进方法同NE ̄IGAꎮTSGA及GA的选择算子及变异算子以及算法其他参数设置同NE ̄IGAꎮ得到的火力分配方案如表5所示ꎮ三种算法得到的火力分配方案的目标函数值及武器总数如表6所示ꎮ由表6可知ꎬ与TSGA及GA求解多目标优化模型相比ꎬ本文提出的NE ̄IGA求解博弈模型得到的分配方案效果较好ꎬ总体毁伤概率较高ꎬ武器价值和使用武器数量均最低ꎮ与TSGA相比ꎬ虽然NE ̄IGA毁伤概率优势较小ꎬ但武器价值降低了13.2%ꎻ与GA相比ꎬNE ̄IGA毁伤概率提高0.6%ꎬ武器价值降低了17.7%ꎮ此外ꎬ由TSGA得到的分配方案中各目标函数值均优于GAꎮ68沈㊀阳㊀理㊀工㊀大㊀学㊀学㊀报㊀㊀第42卷表5㊀三种算法获得的火力分配方案来袭目标火力分配方案NE ̄IGATSGAGAT1W4ꎬ10W4ꎬ12W5ꎬ4W5ꎬ13W45W56W5ꎬ14W14W31W4ꎬ15T2W4ꎬ11W4ꎬ13W15W51W57W5ꎬ10W15W36W43T3W24W51W52W5ꎬ12W14W23W44W32W33W42W48W4ꎬ10W56T4W32W45W57W36W46W5ꎬ11W35W44W4ꎬ14W54T5W15W33W46W13W47W49W4ꎬ14W12W41W5ꎬ13T6W13W43W48W21W22W31W35W48W4ꎬ10W4ꎬ11W55W16W21W23W34W49W4ꎬ11W5ꎬ2W55W58T7W21W4ꎬ15W42W4ꎬ12W24W5ꎬ12W5ꎬ14T8W31W42W5ꎬ11W33W34W53W59W46W4ꎬ12W4ꎬ13T9W44W4ꎬ14W11W17W18W41W47W5ꎬ11T10W36W55W58W59W5ꎬ10W12W4ꎬ13W4ꎬ15W58W13W22W25W45W57表6㊀三种算法获得方案的目标函数值及武器总数NE ̄IGATSGAGA毁伤概率f10.9900.9890.984武器价值f222.325.727.1使用武器数3139415㊀结论本文利用非合作博弈理论研究地对空防御的火力分配问题ꎮ针对以最大化毁伤概率和最小化武器价值作为优化目标的多目标优化问题ꎬ通过将目标函数映射为博弈方ꎬ以对各武器的决策作为策略建立非合作博弈模型ꎮ在遗传算法的基础上ꎬ为提高遗传算法的寻优能力ꎬ加入禁忌搜索技术ꎬ设计了算法NE ̄IGA以寻求博弈模型的纳什均衡ꎮ实验结果验证了本文模型及算法的可行性和有效性ꎮ未来将应用博弈理论对来袭目标动态到达㊁威胁度动态变化等更为复杂的战场环境进行研究ꎬ设计更加高效的纳什均衡求解算法ꎮ参考文献:[1]于连飞ꎬ刘进ꎬ张维明ꎬ等.武器-目标分配问题算法研究综述[J].数学的实践与认识ꎬ2016ꎬ46(2):26-32. [2]程远增ꎬ张佩超ꎬ梅卫ꎬ等.要地防空协同射击打击效能辅助决策研究[J].测控技术ꎬ2015ꎬ34(6):129-131ꎬ135.[3]于博文ꎬ吕明.基于改进NSGA ̄Ⅲ算法的动态武器协同火力分配方法[J].火力与指挥控制ꎬ2021ꎬ46(8):71-77ꎬ82.[4]杨荣军ꎬ李长军.粒子群算法在激光武器反无人机火力分配中的应用[J].指挥信息系统与技术ꎬ2021ꎬ12(5):70-75ꎬ81.[5]方卫国ꎬ石小艳.多层防御模式下武器目标分配决策的群体智能优化算法[J].数学的实践与认识ꎬ2013ꎬ43(7):76-84.[6]DAVISMTꎬROBBINSMJꎬLUNDAYBJ.Approxi ̄matedynamicprogrammingformissiledefenseinter ̄ceptorfirecontrol[J].EuropeanJournalofOperationalResearchꎬ2016ꎬ259(3):873-886.[7]于博文ꎬ吕明.基于D ̄NSGA ̄GKM算法的多阶段武器协同火力分配方法[J].控制与决策ꎬ2022ꎬ37(3):605-615.[8]黄钦龙ꎬ刘忠ꎬ童继进.改进的蚁群算法求解无人艇编队火力分配问题[J].电光与控制ꎬ2020ꎬ27(8):58-63ꎬ74.[9]褚凯轩ꎬ常天庆ꎬ孔德鹏ꎬ等.基于蜂群算法的坦克阵地部署与火力分配模型[J].系统工程与电子技术ꎬ2022ꎬ44(2):546-556.[10]孙海文ꎬ谢晓芳ꎬ庞威ꎬ等.基于改进火力分配模型的综合防空火力智能优化分配[J].控制与决策ꎬ2020ꎬ35(5):1102-1112.[11]罗锐涵ꎬ李顺民.基于改进BBO算法的火力分配方案优化[J].南京航空航天大学学报ꎬ2020ꎬ52(6):897-902.[12]张毅ꎬ姜青山ꎬ陈国生.基于模糊-灰色非合作Nash博弈的多组动态武器-目标分配方法[J].云南大学学报(自然科学版)ꎬ2012ꎬ34(1):26-32ꎬ38. [13]GALATIDG.Gametheoretictargetassignmentstrate ̄giesincompetitivemulti ̄teamsystems[D].Pitts ̄burgh:UniversityofPittsburghꎬ2004.(下转第94页)78第5期㊀㊀㊀㊀㊀孙文娟等:基于博弈建模的地对空防御火力分配策略选择。
协同极大熵聚类算法
协同极大熵聚类算法江森林【摘要】Maximum entropy clustering algorithm (MEC)is a new clustering algorithm based on information theory.In this paper, considering the collaboration relation between different subsets as the starting point and combining the MEC principle in information theory, we change the mechanism of clustering directly on entire data set in traditional clustering algorithm by constructing a novel maximum entropy objective function.We propose a collaboration-based maximum entropy clustering (CMEC).It has the characteristics of higher clustering accuracy and better generalisation than MEC algorithm,and has better physical sense compared with collaborative fuzzy clustering algorithm. Experimental results show that the proposed CMEC algorithm has the above advantages,it has significant improvement in clustering effect than the traditional clustering algorithm.%极大熵聚类算法(MEC)是基于信息论的新型聚类算法。
最大不全k满足问题的局部搜索近似算法

最大不全k满足问题的局部搜索近似算法咸爱勇;朱大铭【期刊名称】《计算机学报》【年(卷),期】2015(000)008【摘要】合取范式可满足与最大可满足问题是理论计算机科学的核心问题.最大不全满足问题是最大可满足问题的一般化.限制每个子句均含有 k(2)个字母的最大不全满足问题又称为最大不全k 满足问题.最大不全满足问题的算法进展,以解答该类问题的半定规划松弛法最具代表性.关于最大不全2满足、3满足和4满足问题,目前性能最好的近似算法分别由Goemans 与 Williamson、Zwick、Karloff 与 Zwick 给出,近似性能比分别为1.139(1/0.878)、1.10047(1/0.9087)和8/7.当 k5时,最大不全 k 满足问题的近似算法则未曾见到.文中给出了一个解答最大不全k 满足问题的局部搜索算法,近似性能比可达到2k -1/(2k -1-1),k 2;进一步将该方法推广到解答由不少于 k 个字母的子句构成的最大不全k 满足问题,近似性能比亦可达到2k -1/(2k -1-1).利用解答最大不全 k 满足问题的近似算法,给出了解答最大 k 可满足问题的新近似算法,近似性能比可达到2k/(2k -1).文中最后证明了若P≠NP,则k4的最大不全 k 满足问题不能近似到小于2k -1/(2k -1-1),从而说明文中解答最大不全 k 满足问题的算法近似性能比是最优的.%The satisfiability problem as well as the maximum satisfiability problem of conjunctive norm forms are the central problems in theoretical computer science.The maximum not-all-equal satisfiability problem is a generalization of the maximum satisfiability problem.The maximum not-all-equal satisfiabilityproblem is named maximum not-all-equal k satisfiability problem,if each clause of its instance contains k (2)literals.Semi-definite programming relaxation is the frequently-used also the most typical method for solving the maximum not-all-equal satisfiability problems.To our knowledge at present,the best algorithms for the maximum not-all-equal 2,3 and 4 satisfiability problems come from the semi-definite programming relaxation methods given by Goemans and Williamson,Zwick,Karloff and Zwick,with performances 1.139 (1/0.878 ), 1.100 47 (1/0.9087 )and 8/7 respectively.When k 5,we have not seen any approximation algorithm for the maximum not-all-equal k satisfiability problems.In this paper,we propose a local search algorithm to solve the maximum not-all-equal k satisfiability problem.This algorithm can achieve the performance ratio 2k -1/(2k -1 -1)for k 2.We extend the method to propose a local search algorithm to solve the more generalized version of the maximum not-all-equal k satisfiability problem,with each clause containing at least k literals.This algorithm can still achieve the performance ratio 2k -1/(2k -1 -1).Using the method for the generalized version of the maximum not-all-equal k satisfiability problem,we propose a new 2k/(2k -1)-approximation algorithm for generalized version of the maximum k satisfiability problem.Finall y,we prove that if P≠NP, then the maximum not-all-equal k satisfiability problem cannot be approximated within 2k -1/(2k -1 -1)for k 4.This implies the performance ratio of our algorithm for the maximum not-all-equal k satisfiability problem is optimal.【总页数】13页(P1561-1573)【作者】咸爱勇;朱大铭【作者单位】山东大学计算机科学技术学院济南 250101;山东大学计算机科学技术学院济南 250101【正文语种】中文【中图分类】TP301【相关文献】1.求解设施定位问题的局部搜索近似算法及其性能保证 [J], 梁国宏;黄辉;张生;何尚录2.合取范式3可满足问题的局部搜索近似算法 [J], 朱大铭;马绍汉;张平平3.k-Median近似计算复杂度与局部搜索近似算法分析 [J], 潘锐;朱大铭;马绍汉;肖进杰4.最大割问题和最大平分割问题基于半定规划松弛的近似算法 [J], 孙婷;李改弟;徐文青5.一种求解最大团问题的自适应过滤局部搜索算法 [J], 张雁;黄永宣;魏明海因版权原因,仅展示原文概要,查看原文内容请购买。
多目标优化算法与求解策略
多目标优化算法与求解策略2多目标优化综述2.1多目标优化的基本概念多目标优化问题(Multi-objective Optimization Problem,MOP)起源于许多实际复杂系统的设计、建模和规划问题,这些系统所在的领域包括工业制造、城市运输、资本预算、森林管理、水库管理、新城市的布局和美化、能量分配等等。
几乎每个重要的现实生活中的决策问题都要在考虑不同的约束的同时处理若干相互冲突的目标,这些问题都涉及多个目标的优化,这些目标并不是独立存在的,它们往往是祸合在一起的互相竞争的目标,每个目标具有不同的物理意义和量纲。
它们的竞争性和复杂性使得对其优化变得困难。
多目标最优化是近20多年来迅速发展起来的应用数学的一门新兴学科。
它研究向量目标函数满足一定约束条件时在某种意义下的最优化问题。
由于现实世界的大量问题,都可归结为含有多个目标的最优化问题,自70年代以来,对于多目标最优化的研究,在国内和国际上都引起了人们极大的关注和重视。
特别是近10多年来,理论探索不断深入,应用范围日益广泛,研究队伍迅速壮大,显示出勃勃生机。
同时,随着对社会经济和工程设计中大型复杂系统研究的深入,多目标最优化的理论和方法也不断地受到严峻挑战并得到快速发展。
近几年来,将遗传算法(Genetic Algorithm,GA)应用于多目标优化问题成为研究热点,这种算法通常称作多目标优化进化算法或多目标优化遗传算法。
由于遗传算法的基本特点是多方向和全局搜索,这使得带有潜在解的种群能够一代一代地维持下来。
从种群到种群的方法对于搜索Pareto解来说是十分有益的。
一般说来,科学研究与工程实践中许多优化问题大都是多目标优化问题。
多目标优化问题中各目标之间通过决策变量相互制约,对其中一个目标优化必须以其它目标作为代价,而且各目标的单位又往往不一致,因此很难客观地评价多目标问题解的优劣性。
与单目标优化问题的本质区别在于,多目标优化问题的解不是唯一的,而是存在一个最优解集合,集合中元素称为Pareto最优或非劣最优。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Despite the considerable amount of algorithms proposed in the last decade for solving the problem of finding frequent patterns in transactional databases (among the many we mention [1] [11] [6] [13] [14] [4] [3] [7]), a single best approach still has to be found.
The Frequent Set Counting (FSC) problem consists in finding all the set of items (itemsets) which occur in at least s% (s is called support) of the transactions of a database D, where each transaction is a variable length collection of items from a set I. Itemsets which verify
The main contribution of kDCI resides on a novel counting inference strategy, inspired by previously known results by Basted et al. [3]. Moreover, multiple heuristics and efficient data structures are used in order to adapt the algorithm behavior to the features of the specific dataset mined and of the computing platform used.
the minimum support threshold are said to be frequent.
The complexity of the FSC problem relies mainly
in the potentially explosive growth of its full search
Starting from the previous DCI (Direct Count & Intersect) algorithm [10] we propose here kDCI, an enhanced version of DCI that extends its adaptability to the dataset specific features and the hardware characteristics of the computing platform used for running the FSC algorithm. Moreover, in kDCI we introduce a novel counting inference strategy, based on a new result inspired by the work of Bastide et al. in [3].
kDCI turns out to be effective in mining both short and long patterns from a variety of datasets. We conducted a wide range of experiments on synthetic and real-world datasets, both in-core and out-of-core. The results obtained allow us to state that kDCI performances are not over-fitted to a special case, and its high performance is maintained on datasets with different characteristics.
threshold, it is possible to reduce the search space, using
the well known downward closure relation, which states
that an itemset can only be frequent if all its subsets
2 The kDCI m
Several considerations concerning the features of real datasets, the characteristics of modern hw/sw system, as well as scalability issues of FSC algorithms have motivated the design of kDCI. As already pointed out, transactional databases may have different characteristics in terms of correlations among the items inside transactions and of transactions among themselves [9]. A desirable feature of an FSC algorithm should be the ability to adapt its behavior to these characteristics.
Pisa, Italy
3Dipartimento di Informatica Universita` di Pisa Pisa, Italy
silvestri@di.unipi.it
{r.perego,p.palmerini}@r.it
Abstract
This paper presents the implementation of kDCI, an enhancement of DCI [10], a scalable algorithm for discovering frequent sets in large databases.
Several important results have been achieved for specific cases. Dense datasets are effectively mined with compressed data structure [14], explosion in the candidates can be avoided using effective projections of the dataset [7], the support of itemsets in compact datasets
kDCI is a multiple heuristics hybrid algorithm, able to adapt its behavior during the execution. Since it origins from the already published DCI algorithm, we only outline in this paper how kDCI differs from DCI. A detailed description of the DCI algorithm can be found in [10].
are frequent as well. The exploitation of this property,
originally introduced in the Apriori algorithm [1], has
transformed a potentially exponentially complex prob-
kDCI: a Multi-Strategy Algorithm for Mining Frequent Sets
Claudio Lucchese1, Salvatore Orlando1, Paolo Palmerini1,2, Raffaele Perego2, Fabrizio Silvestri2,3
can be inferred, without counting, using an equivalence class based partition of the dataset [3].
In order to take advantage of all these, and more specific results, hybrid approaches have been proposed [5]. Critical to this point is when and how to adopt a given solution instead of another. In lack of a complete theoretical understanding of the FSC problem, the only solution is to adopt a heuristic approach, where theoretical reasoning is supported by direct experience leading to a strategy that tries to cover a variety of cases as wide as possible.
space, whose dimension d is, in the worst case, d =