基于FFT变换的酉空时码设计
MIMO原理理解空时编码
MIMO原理理解空时编码MIMO(多输入多输出)是无线通信系统中的一种技术,它可以通过利用多个天线来提高信号的传输速率和可靠性。
空时编码是一种应用于MIMO系统中的编码技术,通过在发射时将信号分配到不同的天线上,并在接收时将接收到的信号进行联合处理,从而提高信号的传输效果。
在MIMO系统中,空时编码通过将信息在空间和时间上进行编码,可以在不增加信号带宽和传输功率的情况下提高信号的传输速率和可靠性。
空时编码有多种方式,其中最常用的是空时均匀编码(STBC)和空时分层编码(STLC)。
空时均匀编码是一种简单但有效的空时编码方式。
在空时均匀编码中,信息位被分成若干个块,每个块中的信息位被分配到多个天线上进行传输。
具体说来,在发送端,多个天线上的信号进行线性组合,并通过信号映射函数将信息位编码成多个矢量。
接收端则通过接收到的信号进行解码,并使用最大似然准则来恢复原始信息。
空时分层编码是一种比空时均匀编码更高效的编码方式。
在空时分层编码中,不同的信息位被分配到不同的天线上进行传输。
具体说来,在发送端,信息位被分为不同的层次,每个层次对应一个天线。
接收端则通过解码和检测算法来恢复原始信息。
空时编码的优点在于可以提高信号的传输速率和可靠性。
由于利用了多个天线进行传输,MIMO系统可以在相同的频带宽度内同时传输多个数据流,从而提高信号的传输速率。
此外,通过在接收端对多个天线接收到的信号进行联合处理,MIMO系统还可以减小多径干扰和提高信号的抗干扰能力,从而提高信号的可靠性。
然而,空时编码也存在一些限制。
首先,空时编码需要在发送端和接收端之间进行信号传输与处理,这会增加系统的复杂性和功耗。
其次,空时编码的性能受到信号的通道状况和天线配置的影响,需要进行精确建模和优化设计。
最后,由于空时编码需要多个天线进行传输和接收,它对设备尺寸和功耗有一定的要求,限制了其在一些应用场景中的使用。
总的来说,空时编码是MIMO系统中的一种重要技术,可以通过利用多个天线来提高信号的传输速率和可靠性。
时间抽取的基2快速傅里叶变换FFT分析与算法实现

离散时间信号的基2快速傅里叶变换FFT (时间抽取)蝶形算法实现一、一维连续信号的傅里叶变换连续函数f(x)满足Dirichlet (狄利克雷)条件下,存在积分变换:正变换:2()()()()j ux F u f x e dx R u jI u π+∞--∞==+⎰ 反变换:2()()j ux f x F u e du π+∞-∞=⎰其中()()cos(2)R u f t ut dt π+∞-∞=⎰,()()sin(2)I u f t ut dt π+∞-∞=-⎰定义幅值、相位和能量如下:幅度:1222()()()F u R u I u ⎡⎤⎡⎤=+⎣⎦⎣⎦ 相位:()arctan(()/())u I u R u ϕ= 能量:22()()(E u R u I u =+)二、一维离散信号的傅里叶变换将连续信号对自变量进行抽样得到离散信号(理想冲击抽样脉冲),利用连续信号的傅里叶变换公式得到离散时间傅里叶变换DTFT ;再利用周期性进行频域抽样,得离散傅里叶变换DFT (详情参考任何一本《数字信号处理》教材)。
DFT 变换如下:正变换:12/0()(),0,1,2,1N j ux Nx F u f x eu N π--===-∑。
反变换:12/01()(),0,1,2,1N j ux Nu f x F u ex N Nπ-===-∑。
DFT 是信号分析与处理中的一种重要变换,因为计算机等数字设备只能存储和处理离散数据(时域、频域)。
因直接计算DFT 的计算量大(与变换区间长度N 的平方成正比,当N 较大时,计算量太大),所以在快速傅里叶变换(简称FFT)出现以前,直接用DFT 算法进行谱分析和信号的实时处理是不切实际的。
直到1965年发现了DFT 的一种快速算法(快速傅里叶变换,即FFT )以后,情况才发生了根本的变化。
FFT 有时间抽取和频率抽取两种,下面介绍时间抽取FFT 。
三、时间抽取的基2快速傅里叶变换FFT令2j NN W eπ-=,则2jkm km NNWeπ-=称为旋转因子,把DFT 正变换改写为:1[][],0,1,1N km N k F m f k W m N -===-∑将函数记作x ,变换后为X ,则为:10[][],0,1,1N kmN k X m x k W m N -===-∑时间抽取的FFT 算法利用了旋转因子的三个性质:周期性、对称性和可约性。
FFT算法详解
FFT算法详解FFT (Fast Fourier Transform) 是一种高效的离散傅里叶变换算法,用于将时域信号转换为频域信号。
它在信号处理、图像处理、通信领域等具有广泛的应用。
本文将详细介绍FFT算法的原理和实现。
一、傅里叶变换的基本原理傅里叶变换是一种将信号从时域转换到频域的方法。
它将时域信号分解成多个不同频率的正弦和余弦函数的叠加。
傅里叶变换的基本公式为:F(k) = Σ_{n=0}^{N-1} f(n)e^{-2πikn/N}其中,F(k)是频域信号的复数表示,f(n)是时域信号的复数表示,N是信号长度,k是频率。
二、傅里叶变换的问题传统的傅里叶变换算法的时间复杂度为O(N^2),计算量较大,不适用于实时处理大型信号。
FFT算法通过分治的思想,将DFT(Digital Fourier Transform)问题转化为多个子问题,从而降低了计算复杂度。
三、蝶形运算蝶形运算的公式为:y_0=x_0+W_N^k*x_1y_1=x_0-W_N^k*x_1其中,x_0、x_1是输入,y_0、y_1是输出,W_N^k是旋转因子,N是信号长度,k是频率。
四、FFT算法的步骤1.将输入信号分成偶数下标和奇数下标的两个子序列。
2.对两个子序列分别进行FFT变换,得到两个子序列的频域表示。
3.将两个子序列的频域表示合并成完整的频域信号。
4.重复上述步骤,直到得到最终的频域信号。
五、FFT算法的实现1.初始化输入信号和旋转因子。
2.将输入信号按照偶数下标和奇数下标分成两个子序列。
3.对两个子序列分别进行FFT变换,递归调用FFT函数。
4.将两个子序列的频域表示合并成完整的频域信号。
5.返回最终的频域信号。
总结:FFT算法是一种高效的离散傅里叶变换算法,通过分治的思想将DFT问题分解为多个子问题,从而降低了计算复杂度。
它在信号处理、图像处理、通信领域等有着广泛的应用。
掌握FFT算法的原理和实现对于理解信号处理技术和提高算法效率具有重要意义。
fft的C语言实现
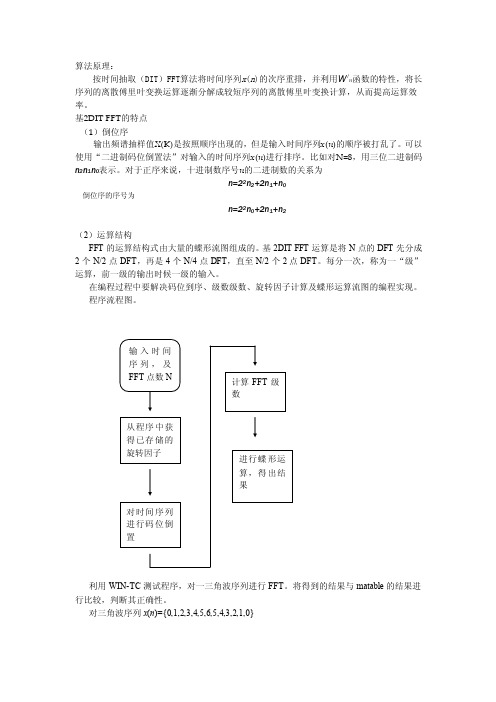
算法原理:按时间抽取(DIT)FFT算法将时间序列x(n)的次序重排,并利用W i n函数的特性,将长序列的离散傅里叶变换运算逐渐分解成较短序列的离散傅里叶变换计算,从而提高运算效率。
基2DIT FFT的特点(1)倒位序输出频谱抽样值X(K)是按照顺序出现的,但是输入时间序列x(n)的顺序被打乱了。
可以使用“二进制码位倒置法”对输入的时间序列x(n)进行排序。
比如对N=8,用三位二进制码n2n1n0表示。
对于正序来说,十进制数序号n的二进制数的关系为n=22n2+2n1+n0倒位序的序号为n=22n0+2n1+n2(2)运算结构FFT的运算结构式由大量的蝶形流图组成的。
基2DIT FFT运算是将N点的DFT先分成2个N/2点DFT,再是4个N/4点DFT,直至N/2个2点DFT。
每分一次,称为一“级”运算,前一级的输出时候一级的输入。
在编程过程中要解决码位到序、级数级数、旋转因子计算及蝶形运算流图的编程实现。
程序流程图。
利用WIN-TC测试程序,对一三角波序列进行FFT。
将得到的结果与matable的结果进行比较,判断其正确性。
对三角波序列x(n)={0,1,2,3,4,5,6,5,4,3,2,1,0}在WIN-TC进行128点FFT,得到前6个结果Matable仿真的前6个结果是XKN2 =Columns 1 through 636.0000 34.2084 -10.3770i 29.1007 -19.4445i 21.4292 -26.1115i 12.2946 -29.6817i 2.9501 -29.9525i前半段波形对比显示WIN-TC结果能保证小数点后2位的精度。
对方波序列x(n),长度为64,前32为1,幅值为1的序列在WIN-TC进行128点FFT,得到前6个结果Matable仿真的前6个结果是Columns 1 through 632.0000 20.8677 -19.8677i 1.0000 -20.3555i -6.2783 - 7.2783i 04.5539 - 3.5539i仿真波形对比显示WIN-TC结果能保证小数点后2位的精度。
c语言fft函数库 嵌入式

C语言FFT函数库与嵌入式傅里叶变换(FFT)是一种重要的信号分析工具,广泛应用于声音处理、图像处理、无线通信等领域。
C语言作为一种比较底层的编程语言,常常用于嵌入式系统中的信号处理任务。
因此,编写一个适用于嵌入式系统的C语言FFT函数库,成为CPU资源有限的嵌入式系统开发中的一个重要需求。
C语言FFT函数库的基本原理C语言FFT函数库的基本原理是将时域信号转换到频域,实现的方法是通过DFT(离散傅里叶变换)算法进行计算。
DFT算法本质上是通过FFT算法实现离散序列的频域计算,因此FFT算法也成为嵌入式应用中最常用的FFT计算方法。
FFT算法通过分治算法将DFT的时间复杂度从O(n^2)优化为O(nlogn),因此FFT算法也成为实现高效计算的核心算法。
在C语言FFT函数库的实现中,主要包括以下几个模块:•输入模块:将离散时间域信号输入到程序中,其中包括时间和幅值。
•映射模块:通过快速傅里叶变换(FFT)算法,将时间域信号映射到频域中。
•输出模块:将映射结果进行输出,其中包括频率和相应的幅值。
•控制模块:整合以上三个模块,控制FFT计算的流程和计算过程中内存资源的分配和释放。
C语言FFT函数库的性能优化C语言FFT函数库的性能优化是嵌入式系统应用中最重要的考虑因素之一。
常见的性能优化策略如下:算法选型在C语言FFT函数库的实现中,对DFT算法进行优化是实现高效计算的基础。
其中,FFT算法采用减少运算次数、提高计算精度、改进算法结构等方式进行优化,常见的FFT算法有蝶形运算法、位逆序置换法等。
位运算优化C语言编译器支持位运算指令,通过对数据进行位操作可以提高运算速度。
在C语言FFT函数库的计算过程中,可以通过位逆序置换法减少运算次数,提高运算速度。
缓存优化在嵌入式系统中,内存资源是十分有限的,因此,合理利用缓存空间是一个重要的考虑因素。
在C语言FFT函数库中,可以通过预先分配缓存空间,减少内存分配和释放的次数。
FFT的算法原理应用

FFT的算法原理应用FFT(Fast Fourier Transform)是一种高效计算离散傅里叶变换(Discrete Fourier Transform,DFT)的算法。
通过使用FFT算法,可以将DFT的计算时间从O(N^2)降低到O(NlogN),其中N是离散序列的长度。
FFT的算法原理基于Radix-2分治策略,将一个长序列分解为两个较短序列,并重复此过程,直到仅剩两个元素相乘为止。
FFT的算法主要应用于信号处理和频谱分析等领域。
其在频谱分析中的应用可以帮助我们了解信号的频率内容以及频率分量的强度。
在信号处理中,FFT可以用于将时域数据转换为频域数据,使得信号处理更加简化和高效。
下面将详细介绍FFT的算法原理和主要应用。
1.FFT算法原理:具体步骤如下:1)通过对输入序列进行重新排列,将序列按照奇偶位进行分组,分为两个长度为N/2的子序列。
2)对这两个子序列分别进行DFT计算,得到两个长度为N/2的频域序列。
3)将这两个序列分别与旋转因子进行乘积,得到两个长度为N/2的频域子序列。
4)将这两个频域子序列连接起来,得到长度为N的频域序列。
5)递归地将这个过程应用于每个子序列,直到序列长度为2,此时不需要再进行分解。
6)将分解后的频域序列进行合并和重排,得到最终的频域序列。
通过这种分治策略,FFT能够将DFT的复杂度从O(N^2)降低到O(NlogN),大大提高了计算效率。
2.FFT的应用:(1)频谱分析:FFT算法可以将时域信号转换为频域信号,分析信号的频率成分和强度。
通过FFT,可以得到信号的频谱信息,帮助我们了解信号的频率特点和分布情况。
常见的应用包括音频分析、图像处理、通信信号分析等。
(2)信号处理:FFT在信号处理中广泛应用,例如滤波、模式识别、降噪等。
通过将信号转换为频域,在频域进行处理后再进行逆变换,可以实现对信号的特定频率的增强或者抑制。
(3)图像处理:FFT在图像处理中的应用主要是基于频率域滤波。
matlab实现傅里叶变换
(1)原理正交级数的展开是其理论基础!将一个在时域收敛的函数展开成一系列不同频率谐波的叠加,从而达到解决周期函数问题的目的。
在此基础上进行推广,从而可以对一个非周期函数进行时频变换。
从分析的角度看,他是用简单的函数去逼近(或代替)复杂函数,从几何的角度看,它是以一族正交函数为基向量,将函数空间进行正交分解,相应的系数即为坐标。
从变幻的角度的看,他建立了周期函数与序列之间的对应关系;而从物理意义上看,他将信号分解为一些列的简谐波的复合,从而建立了频谱理论。
当然Fourier积分建立在傅氏积分基础上,一个函数除了要满足狄氏条件外,一般来说还要在积分域上绝对可积,才有古典意义下的傅氏变换。
引入衰减因子e^(-st),从而有了Laplace变换。
(好像走远了)。
(2)计算方法连续傅里叶变换将平方可积的函数f(t)表示成复指数函数的积分或级数形式。
这是将频率域的函数F(ω)表示为时间域的函数f(t)的积分形式。
连续傅里叶变换的逆变换 (inverse Fourier transform)为即将时间域的函数f(t)表示为频率域的函数F(ω)的积分。
一般可称函数f(t)为原函数,而称函数F(ω)为傅里叶变换的像函数,原函数和像函数构成一个傅里叶变换对(transform pair)。
二、傅立叶变换的应用;DFT在诸多多领域中有着重要应用,下面仅是颉取的几个例子。
需要指出的是,所有DFT的实际应用都依赖于计算离散傅里叶变换及其逆变换的快速算法,即快速傅里叶变换(快速傅里叶变换(即FFT)是计算离散傅里叶变换及其逆变换的快速算法。
)。
(1)、频谱分析DFT是连续傅里叶变换的近似。
因此可以对连续信号x(t)均匀采样并截断以得到有限长的离散序列,对这一序列作离散傅里叶变换,可以分析连续信号x(t)频谱的性质。
前面还提到DFT应用于频谱分析需要注意的两个问题:即采样可能导致信号混叠和截断信号引起的频谱泄漏。
可以通过选择适当的采样频率(见奈奎斯特频率)消减混叠。
按时间抽选的基2FFT算法
按时间抽选的基2FFT算法基2FFT算法(Fast Fourier Transform,快速傅里叶变换)是一种高效的算法,用于在计算机上计算离散傅里叶变换(Discrete Fourier Transform,DFT)。
它的核心思想是利用分治策略和递归操作,在O(nlogn)的时间复杂度下完成离散傅里叶变换。
基2FFT算法的关键步骤如下:1. 将输入的序列划分为两个子序列:偶数位置和奇数位置上的元素分别组成两个子序列。
2. 对这两个子序列分别进行离散傅里叶变换,得到两个新的子序列。
3. 将两个新子序列的元素按照原始顺序交替排列,得到最终的结果。
基于以上步骤,可以利用递归操作来实现基2FFT算法。
具体的实现过程如下:1. 如果输入序列的长度为1,则不需要进行任何操作,直接返回该序列作为结果。
2. 如果输入序列的长度大于1,则按照上述步骤进行分割和计算。
3. 首先将输入序列分为偶数位置和奇数位置上的元素组成的两个子序列。
4. 对这两个子序列分别递归调用基2FFT算法,得到两个新的子序列。
5. 将两个新子序列的元素按照原始顺序交替排列,得到最终的结果。
基2FFT算法的时间复杂度分析如下:假设输入序列的长度为n,则每一层递归的时间复杂度为O(n),总共有logn层递归。
因此,基2FFT算法的总时间复杂度为O(nlogn)。
基2FFT算法在信号处理、图像处理等领域具有广泛的应用。
它可以高效地计算离散傅里叶变换,将时域信号转换为频域信号,从而实现信号分析、频谱分析和频域滤波等操作。
同时,基于基2FFT算法的快速傅里叶变换还能够应用于多项式乘法、高效计算卷积等问题的求解。
总之,基2FFT算法是一种高效的离散傅里叶变换算法,通过利用分治策略和递归操作,能够在O(nlogn)的时间复杂度下完成计算。
它在信号处理和图像处理等领域有着重要的应用价值。
基2FFT算法(Fast Fourier Transform,快速傅里叶变换)是离散傅里叶变换(Discrete Fourier Transform,DFT)的一种高效计算方法。
c++的fft算法计算幅值与相位

C++的快速傅里叶变换(FFT)算法是一种高效的算法,用于计算信号的频域表示。
FFT算法可以帮助我们计算信号的幅值和相位,从而更好地理解信号的性质和特征。
在本文中,我们将深入探讨C++中的FFT算法,包括其原理、实现和应用。
希望通过本文的介绍,读者能够对C++中的FFT算法有更深入的了解,并且能够应用于实际工程中。
一、FFT算法的原理FFT算法是一种基于分治策略的算法,通过将信号分解成多个子信号进行频域分析。
其原理主要涉及到信号的离散傅里叶变换(DFT),DFT算法可以将时域信号转换为频域表示,从而得到信号的幅值和相位信息。
在C++中,我们可以使用现成的库函数或者手动实现FFT算法。
无论是哪种方式,我们都需要了解DFT和FFT算法的原理,从而更好地理解算法的实现细节。
二、C++中的FFT算法实现在C++中,我们可以使用现成的库函数如FFTW或者Boost库来实现FFT算法。
这些库函数提供了高效的FFT算法实现,并且具有良好的性能和稳定性。
另外,我们也可以手动实现FFT算法,这需要对DFT和FFT算法原理有深入的理解,并且需要具备一定的数学功底和编程技巧。
手动实现FFT算法可以帮助我们更好地理解算法的细节,并且可以根据实际需求进行定制化的优化。
无论是使用现成的库函数还是手动实现FFT算法,我们都需要注意算法的正确性和性能,尤其是在实际工程中需要处理大量数据时。
在选择实现方式时需要综合考虑算法的复杂度、性能和稳定性。
三、计算信号的幅值与相位通过FFT算法,我们可以得到信号的频域表示,从而可以计算信号的幅值和相位。
计算信号的幅值和相位可以帮助我们更好地理解信号的特征和属性,从而进行进一步的分析和处理。
在C++中,我们可以通过FFT算法得到信号的频谱数据,然后根据频谱数据计算信号的幅值和相位。
这涉及到一些数学知识和算法实现细节,需要仔细处理每一步的计算过程,确保结果的正确性和可靠性。
四、FFT算法的应用FFT算法在实际工程中有广泛的应用,包括音频信号处理、图像处理、通信系统等领域。
MIMO原理理解空时编码

MIMO原理理解空时编码MIMO(Multiple-Input Multiple-Output)是一种通信技术,利用多个发射天线和多个接收天线来提高传输速率和信号质量。
MIMO技术的一个重要应用是空时编码(Space-Time Coding),它通过在时间和空间上对数据进行编码和传输来提高通信系统的可靠性和效率。
空时编码的关键概念是空时块编码(Space-Time Block Coding,简称STBC),它将数据块分为多个时间步长,并使用多个天线同时发送这些时间步长的数据。
通过利用多个天线可同时传输多个数据流,空时编码可以提高信道容量和系统可靠性。
一个STBC系统通常有多个发射天线和多个接收天线。
在发送端,数据被分成多个时间步长,并以特定顺序通过发射天线发送。
每个时间步长的数据通过编码矩阵进行处理,编码矩阵是一个由特定规则生成的矩阵。
编码矩阵的每一行代表发送天线的输出,每一列代表时间步长的信号。
编码矩阵的作用是将时间步长数据分配到各个发送天线,并进行合适的编码处理。
在接收端,通过接收到的信号进行处理还原出信号的原始数据。
这里的处理涉及到两个关键概念:空间分集(Spatial Diversity)和空时编码解码(Space-Time Decoding)。
空间分集是指通过多个接收天线接收并处理信号,从而减少信号在传输过程中的失真和干扰。
多个接收天线可以接收到不同的信号路径,并通过对接收信号进行处理,可以提高信号的可靠性和防止丢失。
空时编码解码是指通过对接收到的信号进行解码处理,从中还原出原始数据。
解码的过程涉及到信号处理算法,包括线性等式求解和最小均方误差等方法。
总的来说,空时编码通过将数据块分成多个时间步长,并在多个发射天线上同时发送这些时间步长的数据,从而提高传输速率和系统可靠性。
通过空间分集和空时编码解码的技术,接收端可以测量和估计信号的失真和干扰,并通过信号处理算法还原出原始数据。
空时编码在无线通信系统中得到了广泛应用,可以显著提高系统的性能和可靠性。
傅里叶变换(FFT)详解

关于傅立叶变换,无论是书本还是在网上可以很容易找到关于傅立叶变换的描述,但是大都是些故弄玄虚的文章,太过抽象,尽是一些让人看了就望而生畏的公式的罗列,让人很难能够从感性上得到理解,最近,我偶尔从网上看到一个关于数字信号处理的电子书籍,是一个叫Steven W. Smith, Ph.D.外国人写的,写得非常浅显,里面有七章由浅入深地专门讲述关于离散信号的傅立叶变换,虽然是英文文档,我还是硬着头皮看完了有关傅立叶变换的有关内容,看了有茅塞顿开的感觉,在此把我从中得到的理解拿出来跟大家分享,希望很多被傅立叶变换迷惑的朋友能够得到一点启发,这电子书籍是免费的,有兴趣的朋友也可以从网上下载下来看一下,URL地址是:/pdfbook.htm要理解傅立叶变换,确实需要一定的耐心,别一下子想着傅立叶变换是怎么变换的,当然,也需要一定的高等数学基础,最基本的是级数变换,其中傅立叶级数变换是傅立叶变换的基础公式。
二、傅立叶变换的提出让我们先看看为什么会有傅立叶变换?傅立叶是一位法国数学家和物理学家的名字,英语原名是Jean Baptiste Joseph Fourier(1768-1830), Fourier对热传递很感兴趣,于1807年在法国科学学会上发表了一篇论文,运用正弦曲线来描述温度分布,论文里有个在当时具有争议性的决断:任何连续周期信号可以由一组适当的正弦曲线组合而成。
当时审查这个论文的人,其中有两位是历史上著名的数学家拉格朗日(Joseph Louis Lagrange, 1736-1813)和拉普拉斯(Pierre Simon de Laplace, 1749-1827),当拉普拉斯和其它审查者投票通过并要发表这个论文时,拉格朗日坚决反对,在近50年的时间里,拉格朗日坚持认为傅立叶的方法无法表示带有棱角的信号,如在方波中出现非连续变化斜率。
法国科学学会屈服于拉格朗日的威望,拒绝了傅立叶的工作,幸运的是,傅立叶还有其它事情可忙,他参加了政治运动,随拿破仑远征埃及,法国大革命后因会被推上断头台而一直在逃避。
FFT算法详解
FFT算法详解快速傅里叶变换(Fast Fourier Transform, FFT)算法是一种高效的计算离散傅里叶变换(Discrete Fourier Transform, DFT)的方法,广泛应用于信号处理、图像处理、通信等领域。
本文以详细的解释为主,全面讲解FFT算法。
傅里叶变换将一个信号从时域转换到频域,即将信号表示为不同频率分量的叠加。
如果信号为离散的,则称为离散傅里叶变换(DFT)。
DFT 的计算复杂度为O(N^2),其中N是信号的长度。
然而,通过观察DFT的计算过程,我们可以发现其中存在着很多重复计算。
FFT算法就是通过减少这些重复计算的方式,降低了DFT的计算复杂度到O(NlogN)。
FFT算法的核心思想是DFT分治思想,将DFT递归地分解为更小的DFT,最终合并得到原始信号的DFT结果。
具体来说,FFT算法将长度为N 的信号分为两半,分别计算这两部分信号的DFT,然后再将它们合并成N/2个长度为2的DFT,重复这个过程直到计算得到最小粒度的DFT。
假设N为2的整数次幂,一个长度为N的信号X可以表示为X=x[0],x[1],...,x[N-1]。
FFT的计算可以分为两个步骤:分解和合并。
分解步骤:1.如果N=1,直接返回x;2.将长度为N的信号X分为两半,分别记作X0和X1,其中X0=x[0],x[2],...,x[N-2],X1=x[1],x[3],...,x[N-1];3.对X0和X1分别递归地执行FFT计算,得到长度为N/2的结果Y0和Y1;4.构造长度为N的结果Y,其中Y[k]=Y0[k]+W_N^k*Y1[k],其中W_N=e^(-2πi/N),0<=k<N/2;5.返回Y。
合并步骤:将长度为N/2的结果Y0和Y1合并为长度为N的结果Y,其中Y[k]=Y0[k]+W_N^k*Y1[k],其中W_N=e^(-2πi/N),0<=k<N/2通过分解和合并的操作,FFT算法可以高效地计算DFT。
FFT算法详解
FFT算法详解快速傅里叶变换(Fast Fourier Transform,FFT)是一种高效的计算傅里叶变换的算法。
傅里叶变换是一种将信号从时域转换到频域的方法,它能够将一个时域上的信号表示为一系列不同频率的正弦和余弦函数。
FFT算法的基本思想是将一个N点的离散傅里叶变换分解为多个较小规模的离散傅里叶变换,并利用这些较小规模的变换的结果快速计算出原始信号的傅里叶变换。
这种分治的思想使得FFT算法的时间复杂度为O(NlogN),远远优于朴素的傅里叶变换算法的时间复杂度O(N^2)。
下面详细介绍FFT算法的过程:1.假设有一个长度为N的输入序列x[n],其中n从0到N-1、首先将序列x[n]划分为偶数下标序列x_e[n]和奇数下标序列x_o[n],即x_e[n]=x[2n]和x_o[n]=x[2n+1]。
2.分别对序列x_e[n]和x_o[n]进行FFT变换。
对于每个序列,可以继续进行递归的分解,将其划分为更小规模的序列,直到序列长度为1为止。
3.利用蝴蝶运算的方法,将两个较小规模的FFT变换的结果合并为一个较大规模的FFT变换的结果。
蝴蝶运算是指将两个复数相乘后加到另一个复数上的运算。
4.重复第3步,直到所有序列都合并为一个长度为N的FFT变换。
上述步骤可以通过递归的方式实现,也可以通过迭代的方式实现。
下面介绍一种迭代的方式:1.初始化一个长度为N的输入序列x[n],将其按照倒位序重新排列,得到一个新的序列X[n]。
具体的排列方式为,将x[n]的二进制位反转后所得到的二进制数转换为十进制数。
2.设置一个变量m,初始值为2(即每两个元素合并为一个的步长),进行迭代。
3. 对于每个步长m,分别计算W_m^0, W_m^1, ..., W_m^{m-1}的值,其中W_m^k = e^{-2 \pi i k/m}。
这些值可以预先计算并保存,以减少重复计算。
4.对于每个步长m,将序列X[n]划分为m个长度为N/m的子序列,分别为X_0[n],X_1[n],...,X_{m-1}[n]。
c语言实现离散傅里叶变换 -回复
c语言实现离散傅里叶变换-回复C语言是一门强大而受欢迎的编程语言,它被广泛应用于各种领域,包括信号处理。
在信号处理中,离散傅里叶变换(Discrete Fourier Transform,简称DFT)是一个重要的数学工具,用于将一个离散的时间域信号转换为其频域表示。
本文将一步一步介绍如何使用C语言实现离散傅里叶变换。
第一步:理解离散傅里叶变换的原理和数学公式离散傅里叶变换是将一个N个采样点的离散信号x(n)转换为复数形式的频域表示X(k),其中n表示时间索引,k表示频率索引。
数学公式如下所示:\[X(k) = \sum_{n=0}^{N-1}x(n)e^{-j2\pi kn/N}\]其中,j是虚数单位。
该公式可以用于将一个离散信号从时间域转换到频域,并且可以通过逆离散傅里叶变换将其重新转换回时间域。
第二步:确定实现离散傅里叶变换的方法在C语言中,我们可以使用迭代方法或递归方法来实现离散傅里叶变换。
在本文中,我们将使用迭代方法进行实现。
迭代方法的主要思想是通过循环计算每一个频率索引的频域值。
第三步:创建C语言函数进行离散傅里叶变换现在,我们将创建一个名为dft的C语言函数,用于实现离散傅里叶变换。
该函数将接收一个输入信号的数组和其长度作为参数,并返回一个复数形式的频域表示的数组。
代码如下所示:c#include <stdio.h>#include <stdlib.h>#include <math.h>typedef struct {double real;double imag;} Complex;Complex* dft(double* input, int length) {Complex* output = (Complex*)malloc(length *sizeof(Complex));for (int k = 0; k < length; k++) {output[k].real = 0;output[k].imag = 0;for (int n = 0; n < length; n++) {double angle = 2 * M_PI * k * n / length;output[k].real += input[n] * cos(angle);output[k].imag += -1 * input[n] * sin(angle);}}return output;}在上述代码中,我们首先创建了一个复数数据类型Complex,用于存储每一个频域值的实部和虚部。
时域傅里叶变换和空域傅里叶变换
时域傅里叶变换和空域傅里叶变换嘿,伙计们!今天我们来聊聊时域傅里叶变换和空域傅里叶变换,这可是信号处理里的重要知识哦!咱们先来简单了解一下吧。
咱们说说时域傅里叶变换。
你知道吗,时域就像是一个时间的场地,而傅里叶变换就像是在这个场地上举办一场盛大的舞会。
这场舞会的名字叫作“傅里叶变换”,它的任务是把一个信号从时域转换到频域。
换句话说,就是把信号在时间上的表现变成在频率上的表现。
这样一来,我们就可以更好地了解信号的特点了。
那么,空域傅里叶变换又是什么呢?空域就像是一个空间的场地,而傅里叶变换就像是在这个场地上举办一场盛大的舞会。
这场舞会的任务同样是把一个信号从空域转换到频域。
这样一来,我们就可以更好地了解信号在空间上的特点了。
现在,让我们用一个简单的例子来说明一下时域傅里叶变换和空域傅里叶变换的区别。
假设我们有一个信号,它是一个正弦波形。
在时域中,这个信号看起来就像一个上下摆动的波浪。
但是,如果我们把它放到空域中,它就变成了一个波峰和波谷交替出现的图形。
这就是空域傅里叶变换的作用。
通过空域傅里叶变换,我们可以把信号在空间上的特点展现出来。
那么,为什么我们需要时域傅里叶变换和空域傅里叶变换呢?原因很简单,因为它们可以帮助我们更好地了解信号的特点。
比如说,在无线电通信中,我们经常需要对信号进行调制和解调。
这时候,时域傅里叶变换和空域傅里叶变换就派上用场了。
通过它们,我们可以把信号从时域和空域转换到频域,从而实现信号的调制和解调。
时域傅里叶变换和空域傅里叶变换是信号处理中的两个重要概念。
它们可以帮助我们更好地了解信号的特点,从而实现信号的调制和解调。
希望这篇文章能让你对这两个概念有更深入的了解!下次再见啦!。
fft算法 离散频谱校正
fft算法离散频谱校正FFT(Fast Fourier Transform)算法是一种快速计算离散傅里叶变换(Discrete Fourier Transform)的算法。
它的主要思想是通过对称性将N点的DFT分解为两个N/2点的DFT,再通过重组得到最终结果。
该算法的时间复杂度为O(NlogN),相较于传统的DFT算法,其计算速度更快,因此广泛应用在信号处理、图像处理、通信等领域中。
离散频谱校正是指在频域中对信号进行处理,以消除或校正频谱中的不良效应。
在进行频域处理时,可能会出现混叠效应(频谱重叠)或频率偏移等问题,这会导致信号的失真或干扰。
离散频谱校正的目的就是通过一系列算法和技术,对频谱进行调整和修正,以恢复信号的原始特性。
离散频谱校正的方法有很多种,下面将简要介绍几种常见的方法。
1. 频谱外插频谱外插是一种常见的频谱校正方法,它通过在频谱中插入一定数量的零值来改变信号的频谱特性。
这样可以使频谱变得更加平滑,并且减小混叠效应。
频谱外插在FFT算法中很容易实现,只需要将原始信号补零到2的幂次方长度即可。
2. 频谱滤波频谱滤波是指通过滤波器对频谱进行处理,以去除或衰减不需要的频率分量。
常见的滤波器包括低通滤波器、高通滤波器、带通滤波器等。
滤波器可以选择不同的截止频率、通带宽度和阻带宽度,以满足不同的要求。
3. 频谱修正频谱修正是一种校正频谱幅度和相位的方法。
通常在进行频域分析时,频率响应对于不同频率的信号可能有不同的增益和相位差,这就需要进行补偿和修正。
频谱修正的方法包括经验修正和数学模型修正等,可以根据信号的特性进行选择。
4. 非线性变换非线性变换是一种通过对频谱进行非线性操作,以改变频谱特性的方法。
常见的非线性变换包括幂律变换、对数变换、绝对值变换等。
非线性变换可以改变频谱的动态范围和分辨率,从而提取出信号的细节或增强信号的特征。
5. 频率域插值频率域插值是指通过对频谱进行插值,以增加频率的分辨率或减小频率的间隔。
c语言dft算法 -回复

c语言dft算法-回复c语言dft算法是一种基于数字信号处理的算法,用于将时域信号转换为频域信号。
DFT全称为离散傅里叶变换(Discrete Fourier Transform),它是连续傅里叶变换(FT)在离散时域信号上的推广。
首先,我们需要了解时域信号和频域信号的概念。
时域信号是指信号的幅度随时间变化的情况,例如音频信号的波形图就是一个典型的时域信号。
而频域信号则是指信号在不同频率上的成分,是将时域信号分解到各个频率的结果。
然后,我们需要明确DFT算法的数学表达式。
DFT的数学表达式如下:表示时域信号的采样值,ω是旋转因子(可以将其理解为复数平面上的旋转角度),y(k)则表示在频域上的采样值。
接下来,我们通过代码实现DFT算法。
以下是一个简单的C语言代码实现:c#include <stdio.h>#include <math.h>#define N 8void dft(double x_real[N], double x_imag[N], double X_real[N], double X_imag[N]) {for(int k = 0; k < N; k++) {for(int n = 0; n < N; n++) {X_real[k] += x_real[n] * cos(2 * M_PI * k * n / N);X_imag[k] -= x_real[n] * sin(2 * M_PI * k * n / N);}}}int main() {double x_real[N] = {1, 2, 3, 4, 5, 6, 7, 8};double x_imag[N] = {0};double X_real[N] = {0};double X_imag[N] = {0};dft(x_real, x_imag, X_real, X_imag);printf("DFT result:\n");for(int k = 0; k < N; k++) {printf("f + fi\n", X_real[k], X_imag[k]);}return 0;}这段代码展示了一个长度为8的时域信号x(n)的DFT变换过程。
基于Fourier矩阵的酉空时码设计
基于Fourier矩阵的酉空时码设计
秦传歌
【期刊名称】《现代电子技术》
【年(卷),期】2007(30)19
【摘要】基于Fourier矩阵提出了一种新的酉空时码设计技术,依据满分集增益的定义证明了该码能获得满分集增益.在此基础上推导了该空时码成对错误概率的闭式上界,充分利用了该码的结构特点设计了一种快速极大似然解码算法,最后给出了误码性能的仿真结果.
【总页数】3页(P23-25)
【作者】秦传歌
【作者单位】中国联通有限公司,济宁分公司,山东,济宁,272000
【正文语种】中文
【中图分类】TN911.22
【相关文献】
1.基于正交空时分组码的酉空时码设计 [J], 郭永亮;朱世华;张国梅
2.基于FFT变换的酉空时码设计 [J], 刘毓;方伟鉴
3.基于准正交空时码的最优线性预编码矩阵设计 [J], 刘雪芳;傅丰林
4.基于酉差分空时码的信道估计性能研究 [J], 陈雪松;韩明宇
5.基于酉空时码的盲信道均衡新算法 [J], 乔登宇;韦岗;陈芳炯
因版权原因,仅展示原文概要,查看原文内容请购买。
用C++实现FFT运算

用C++实现FFT运算姓名:学号:专业:通信工程用C++实现FFT 运算摘要:介绍用C++实现FFT 运算的原理算法、硬件框图、软件流程图,以及调试过程、步骤和结果。
并对结果进行了分析。
引言:(FFT 的用处及应用 为什么要用C++编写,C++和matlab 相比优势和不足,C++能够实现的算法单一,调用的函数简单都有哪些,本例是通用程序) 原理: 1.算法● DFT :离散傅里叶变换是连续傅里叶变换字时域和频域上都离散的形式,将时域信号的采样变换为在离散时间傅里叶变换。
有限长序列x(n)的N 点DFT 为∑-==1)()(N n kn NWn x k X● 基2FFT 基本原理设序列x(n)的长度为N,且满足MN 2=,M 为自然数。
按n 的奇偶把x(n)分解为两个N/2点的子序列)2()(1r x r x = 12/,...,1,0-=N r)12()(2+=r x r x 12/,...,1,0==N r因此X(k)又可表示为)()()(21k X W k X k X kN += 12/,...,1,0-=N k (1.1) )()()2/(21k X W k X N k X kN -=+ 12/,...,1,0-=N k (1.2) 这样,就将N 点DFT 分解为两个N/2点DFT 和(1.1),(1.2)的运算。
● 原位计算:蝶形运算的两个输出值仍可放回蝶形运算的两个输入所在的存储器中,这种利用同一存储单元存储蝶形计算输入、输出的方法即为原位运算。
每一级(列)有N/2个蝶形运算,所以只需N 个存储单元,可以节省存储单元。
● 蝶形运算式(1.1),(1.2)的运算可用下图所示的流图符号表示,成为蝶形运算符号。
● 倒位序 顺序 倒序 十进制数I 二进制数 二进制数 十进制数J 0 1 2 3 4 5000 001 010 011 100 101 000 100 010 110 001 1010 4 2 6 1 5CB A-BCA+CBA6 7110 111 011 111 3 7软件流程图:开始读入MN 2=倒序L=1,M12-=L BJ=0,B-1J P L M -=2L N J K 2,1,-=Tk A W B k A k A B k A W B k A k A T p N pN ⇐+-⇐+++⇐)()()()()()(输出结束调试过程和步骤:1.程序代码:#include <stdio.h>#include <math.h>#include <stdlib.h>#define N 1000 //struct complex{double real;double img;};complex x[N], *W; /*输入序列,变换核*/int size_x=0; //初始化x的点数double PI; //pi的值void fft(); /*快速傅里叶变换*/void initW(); /*初始化变换核*/void change(); /*变址*/void add(complex ,complex ,complex *); /*复数加法*/ void mul(complex ,complex ,complex *); /*复数乘法*/ void sub(complex ,complex ,complex *); /*复数减法*/ void output();int main(){int i; /*输出结果*/ system("cls");PI=atan(1)*4; //求出pi的值printf("请输入x的点数:\n");scanf("%d",&size_x);printf("请输入x的数据:\n");for(i=0;i<size_x;i++)scanf("%lf%lf",&x[i].real,&x[i].img);//lf:长浮点initW();fft();output();return 0;}/*快速傅里叶变换*/void fft(){int i=0,j=0,k=0,l=0;complex up,down,product;change();for(i=0;i< log(size_x)/log(2) ;i++){ /*一级蝶形运算*/ l=1<<i;for(j=0;j<size_x;j+= 2*l ){ /*一组蝶形运算*/for(k=0;k<l;k++){ /*一个蝶形运算*/mul(x[j+k+l],W[size_x*k/2/l],&product);add(x[j+k],product,&up);sub(x[j+k],product,&down);x[j+k]=up;x[j+k+l]=down;}}}}/*初始化变换核*/void initW(){int i;W=(complex *)malloc(sizeof(complex) * size_x);for(i=0;i<size_x;i++){W[i].real=cos(2*PI/size_x*i);W[i].img=-1*sin(2*PI/size_x*i);}}void change(){ //x倒位序complex temp; //temp是复数unsigned short i=0,j=0,k=0;double t;for(i=0;i<size_x;i++){k=i;j=0;t=(log(size_x)/log(2));while( (t--)>0 ){j=j<<1; //j左移一位j|=(k & 1);//j=j|(k & 1),|表示位或k=k>>1;}if(j>i){temp=x[i];x[i]=x[j];x[j]=temp;}}}/*输出傅里叶变换的结果*/void output(){int i;printf("The result are as follows\n");for(i=0;i<size_x;i++){printf("%.4f",x[i].real);if(x[i].img>=0.0001)printf("+%.4fj\n",x[i].img);else if(fabs(x[i].img)<0.0001)printf("\n");else printf("%.4fj\n",x[i].img);}}void add(complex a,complex b,complex *c){c->real=a.real+b.real; c->img=a.img+b.img;}void mul(complex a,complex b,complex *c){c->real=a.real*b.real - a.img*b.img;c->img=a.real*b.img + a.img*b.real;}void sub(complex a,complex b,complex *c){c->real=a.real-b.real; c->img=a.img-b.img;}2.调试过程:实验结果:结果分析:用C++实现了FFT结束语:通过这个题目,让我学会了结构体,同时对DFT,FFt有加深了印象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( ) 1
s为 T ×M发射信号矩阵;x 为 T ×N接收信号 矩阵; H为 M 信道衰落系数矩 阵; 为 T ×N w ×N噪
声矩阵.
√ zz1 (= ……厶L 2r, 为 = )
TXM 酉矩阵 ( 1 l H =… … L L =,,H
3 酉空时编码原理
空 时信 号 集 性 能 优 劣 .
W 。 W 。 …
A
=
W。
通过增加信号发送功率 P和减 小 d 都 可 以使 C e f界降低 . hmo 由于前种方法在实际通信中较少采
用 , 因此 只 能 通 过 降低 d 来 改善 C e o 界 . hr f n
1
— —一
非频率选择 性衰落信道 .假设系统有 M 个发射天线,N个接收天线 ,则其空时信道模型如图 l [ 2 1 所示 :
图 1 空时信 道模 型 收稿 日期:20— 21 080— 5 作者简介:刘 毓 ( 98 ) 17- ,男,四川资中人,重庆三峡学院物理与电子工程学院讲师,硕士. 基金 项 目:本 文系重庆 三峡 学院院级课题 资助 项 目
基 于 F T变换 的酉空 时码设计 F
刘 毓 方伟鉴
( 重庆三峡 学院物理与 电子工程 学院 ,重庆 万州 440 ) 000
摘
要:酉空时码 ( S C U T )是 一种 可以在发送端和接 收端都 不需要知道信道状态信 息时使数
据 能够可靠传 输的一种 空时编码方案 , 一种适合未来 3/G快衰落信 道的空时编码技术. 文提 是 G4 本
由可/ 中为, 鱼 上知√ √常因 面s 数而 [ = 而
式 中 d , 2 … d 是互 相关 矩 阵 ld … … .
。 上 夼 力 :
1 ( 4 )
f 的
n
奇异值 , 1 d … … d 0, 且 可得其 C e f hmo
程 中,对每 一个信号 我们很难估表示把 转输成 t 的错误概率,反
从 ( )中可知:当 d =… … d =0时, 5 1 M
∥=P c o s ̄f fa s t d {h o e . t nmie ) / r t
=
取最 小值 , d =… … d =1 取得最大值 当 l 时,
根据矩阵定理在 L> 时, d , 2 … d ld … M不 时, z 与 ,
率 ,因此只能根据 信号对之 间传输错误 概率得 出
。 ,
C mf :J h o界 [ e 3
=
I
l
( ) 3
厶 /1 f ‘ = ≠f ,
I
( ) 5
厶
∑P , , ) ∑∑ {. . , / . D
/ =1
1 T/ )(-d 2 + p M 1 i ) n 41 T/ ) (+p M
可能出现无法估计的情况. 因此不需信道估计 的盲空时编码方案便应运 而生 , 包括:酉空时码和差 分空时码. 本文主要给出两种基于傅立 叶变换 的酉空时码设计 方案并对其进行仿真分析.
2 空时信道模型
移动信 道是研究移动通信系统首先要解决 的问题, 目前 空时编码系统主要都是针对平坦衰落信道 ,即
P c o s ̄f f a s t d {h o e / . nmie ) t r t
一
×
可能全 为零,从而可得在 L>
中的所有列不可能完全正交,因此可以通过信号集
中不同信号之间相关系数 d 的大小来判别 一个 酉
维普资讯
重 庆 三 峡 学院 掌 报
维普资讯
20 0 8牟
3期
重庆三 峡学 院学报
No 32 . .DD
第2 4卷 ( l 10期 )
J UR LOFC N O G T E OR E O NA HO G HR EG G SI
E Sr R rY
V_.4No1 0 0 2 .l 1
系统把经过信道编码后的信号 分成长度 为豫
表示复共轭转置) 因此调制信号 S 也为 TxM 酉 , t 矩阵, 接收端再对调制信 号 S 进行酉空时解调恢复 t
的信号块 ( 为信道衰落持续不变符号时间,R 为 T
原始信号 ,其过程如下图所示 :
b 1 b 2
●
b :
●
b R
瑞 利平坦衰 落信 逆 ( N
- r
一 网
一
一 ~ b ●
6
<一
H × ( Ⅳ) ×Ⅳ:
图 2 酉 空时调 制解 调 系统框 图
1 — 2
对酉空时信 号 , 设计变 向为对 , 设计,取 L个 酉
空时信 号 … … S 组成 酉空 时信 号集. , 在传 输过
维普资讯
刘
毓
方 伟 鉴 : 基 于 F T变 换 的 酉 空 时 码 设 计 F
收 发 信 号 关 系 可 以 下 矩 阵 表 示 : 用
x = SH ÷ w
信号转输速率 ) ,然后把 每个信 号块进 行酉空时调 制,得到调制信号:
出 基于傅立叶变换的酉空时码设计方案并对其性能仿真分析. 关键词:酉空时码;信道状态信 息;傅 立叶变换 ;3/G G4 中图分类号:T 9 文献标识码 :A N2 文章编 号:1 0- 15( 0 8 3 02 — 5 9 8 2 0 )0- 07 0 0 3
1 引言
空时码是在 MI MO ( lpeIp t lpeO tu)天线系统基础上发展而来 的一种基于多天线 阵发 Mu il n u t l u t t Mu i p 送技术的编码方案 ,它可 以同时获得 空间分集和时间分集 ,从而 获得较高的信道容量和较低 的信号误 比特 率.在发射天线数 目过多或收发天线之 间衰落系数变化很快 的情况下 ,系统对信道估计将十分困难 ,甚至 Ⅲ
√ W。 W … ~