凸轮机构大作业___西工大机械原理要点
机械原理大作业凸轮
机械原理大作业二题目:凸轮机构设计19班号: 1408301学号: 1140830118姓名:高奎教师:焦映厚完成时间: 2016.6.11.从动件位移,速度,加速度图syms fai1fai2fai3=pi/3:0.01:8/9*pi;fai4=4/3*pi:0.01:2*pi;omiga=1;h=25;fai1=0:0.01:pi/3;fai2=160/180*pi:0.01:240/180*pi;s1=h*(fai1*3/pi-1/(2*pi)*sin(360/60*fai1));s2=h/2*(1+cos(180/80*(fai2-160/180*pi)));figure(1);subplot(3,1,1);subs(s1,'fai1',fai1);subs(s2,'fai2',fai2);plot(fai1,s1);hold on;plot(fai2,s2);plot(fai3,25);plot(fai4,0);xlabel('凸轮转角(rad)');ylabel('位移(mm)');title('位移图');v1=h*omiga*3/pi*(1-cos(360/60*fai1));v2=-h*omiga*180/160*sin(180/80*(fai2-160/180*pi));subplot(3,1,2);plot(fai1,v1,'g');hold on;plot(fai2,v2,'g');plot(fai3,0,'g');plot(fai4,0,'g');xlabel('凸轮转角(rad)');ylabel('速度(mm/s)');title('速度图');a1=2*pi*h*omiga^2/((60/180*pi)^2)*sin(360/60*fai1);a2=-(180/80)^2/2*h*omiga^2*cos(180/80*(fai2-160/180*pi)); subplot(3,1,3);plot(fai1,a1,'r');hold on;plot(fai2,a2,'r');plot(fai3,0,'r');plot(fai4,0,'r');xlabel('凸轮转角(rad)');ylabel('加速度(mm/s^2)');title('加速度图');2.类速度-位移图x1=60;t1=100;x2=80;t2=120;h=25;x1=x1*pi/180;x2=x2*pi/180;t1=t1*pi/180;t2=t2*pi/180; x= 0:0.001:60*pi/180;%升程s = h*(x/x1-sin(2*pi*x/x1)/(2*pi));k =-h*(1-cos(2*pi*x/x1))/x1;plot(k,s,'r'),hold on;x=160*pi/180:0.001:240*pi/180;%回程s = h*(1+cos(pi*(x-(x1+t1))/x2))/2;k = pi*h*sin(pi*(x-(x1+t1))/x2)/(2*x2);plot(k,s,'r'),hold on;%回程切线for i=-3.9:1:-3.9;f=@(k)k*tan(20/180*pi)+i;k =-50:0.1:50;s=f(k);plot(k,s),hold on;end%升程切线for i=-57:0.2:-57;f=@(k)-k*tan(55*pi/180)+i;k =-50:0.1:50;s=f(k);plot(k,s),hold on;endgrid onf=@(k)k*tan(55*pi/180);k=-50:0.1:0;s=f(k);plot(k,s);hold on;xlabel('ds/dψ');ylabel('s');title('类位移-速度图');3.压力角和曲率半径图figure(3);e=20;r0=102;s0=sqrt(r0.^2-e.^2);rs1=s0+s1;rs2=s0+s2;ang1=abs(atan((v1/omiga-e)./rs1))*180/pi; ang2=abs(atan((v2/omiga-e)./rs2))*180/pi; plot(fai1,ang1);hold on;plot(fai2,ang2);hold on;plot(fai3,9.0789);hold on;plot(fai4,11.5257);title('压力角图');h=25;t0=pi*60/180;t01=pi*80/180;ts=pi*100/180;ts1=pi*120/180;e=20;s0=100;t=0:0.001:60*pi/180;s=h*(t/t0-sin(2*pi*t/t0)/(2*pi));dx1 =(h/t0-h*cos(2*pi*t/t0)).*cos(t)-(s0+s).*sin(t)- e*cos(t); dy1=(h/t0-h*cos(2*pi*t/t0)).*sin(t)+(s0+s).*cos(t)- e*sin(t); p=sqrt(dx1.^2+dy1.^2);hold onplot(t,p);t=60*pi/180:pi/200:160*pi/180;s=h;dx2 =- sin(t).*(s + s0) - e*cos(t);dy2 =cos(t).*(s + s0) - e*sin(t);p=sqrt(dx2.^2+dy2.^2);hold onplot(t,p);t=160*pi/180:pi/200:240*pi/180;s=0.5*h*(1+cos(pi*(t-(t0+ts))/t01));dx3 =-0.5*h*pi/(2*t01)*sin((pi/t01)*(t-(t0+ts))).*cos(t)-sin(t).*(s + s0) - e*cos(t);dy3 =-0.5*h*pi/(2*t01)*sin((pi/t01)*(t-(t0+ts))).*sin(t)+ cos(t).*(s + s0) - e*sin(t);p=sqrt(dx3.^2+dy3.^2);hold onplot(t,p);t=240*pi/180:pi/200:2*pi;s=0;dx4 =- sin(t).*(s + s0) - e*cos(t);dy4 =cos(t).*(s + s0) - e*sin(t);p=sqrt(dx4.^2+dy4.^2);hold on;plot(t,p);hold off;title('曲率半径');grid on;4.凸轮理论轮廓和实际轮廓的绘制fai=0:0.01:2*pi;x1=60;t1=100;x2=80;t2=120;h=25;x1=x1.*pi./180;x2=x2.*pi./180;t1=t1.*pi./180;t2=t2.*pi./180; e=20;r0=102;s0=100;rr=20;%滚子半径x=0:pi/200:60.*pi/180;s = h.*(x./x1-sin(2.*pi.*x./x1)./(2.*pi));X1=(s0+s).*cos(x)-e.*sin(x);Y1=(s0+s).*sin(x)+e.*cos(x);X11=X1-(rr.*(cos(x).*(s + s0) - e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);Y11=Y1-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);plot(X1,Y1,'r',X11,Y11,'k'),hold on;plot(e*cos(fai),e*sin(fai));plot(r0*cos(fai),r0*sin(fai),'--g');x=60.*pi/180:pi/200:160.*pi/180;s=25;X2=(s0+s).*cos(x)-e.*sin(x);Y2=(s0+s).*sin(x)+e.*cos(x);X22=X2-(rr.*(cos(x).*(s + s0) - e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);Y22=Y2-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);plot(X2,Y2,'r',X22,Y22,'k'),hold on;x=160.*pi/180:pi/200:240.*pi/180;s=h.*(1+cos(pi.*(x-(x1+t1))./x2))./2;X3=(s0+s).*cos(x)-e.*sin(x);Y3=(s0+s).*sin(x)+e.*cos(x);X33=X3-(rr.*(cos(x).*(s + s0) - e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);Y33=Y3-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);plot(X3,Y3,'r',X33,Y33,'k'),hold on;x=240*pi/180:pi/200:2*pi;s=0;X4=(s0+s).*cos(x)-e.*sin(x);Y4=(s0+s).*sin(x)+e.*cos(x);X44=X4-(rr.*(cos(x).*(s + s0) - e.*sin(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);Y44=Y4-(rr.*(sin(x).*(s + s0) + e.*cos(x)))./((sin(x).*(s + s0) + e.*cos(x)).^2 + (cos(x).*(s + s0) - e.*sin(x)).^2).^(1./2);plot(X4,Y4,'r',X44,Y44,'k'),hold on;x=240:pi/200:2*pi;X4=(s0+s).*cos(x)-e.*sin(x);Y4=(s0+s).*sin(x)+e.*cos(x);plot(X4,Y4,'b');legend('凸轮实际轮廓','凸轮理论轮廓','偏距圆','基圆');grid on;axis equal;。
机械原理大作业-凸轮结构20

凸轮机构设计 题目要求:试用计算机辅助设计完成下列偏置直动推杆盘形凸轮机构的设计,已知数据如下各表所示。
凸轮沿逆时针方向作匀速转动。
表一 偏置直动滚子推杆盘形凸轮机构的已知参数升程/mm 升程运动角/。
升程运动规律 升程许用压力角/。
回程运动角/。
回程运动规律 回程许用压力角/。
远休止角/。
近休止角/。
70 120 余弦加速度 35 90 正弦加速度65 60 90要求:1)确定凸轮推杆的升程、回程运动方程,并绘制推杆位移、速度、加速度线图。
2)绘制凸轮机构的sd ds -ϕ线图;3)确定凸轮基圆半径和偏距;4)确定滚子半径;5)绘制凸轮理论廓线和实际廓线。
推杆运动规律:(取32w π=) 1)推程运动规律:由余弦加速度运动公式可得⎥⎦⎤⎢⎣⎡-=)cos(1211θπψh s)sin(2hw v111θπϕθπ=)cos(2h 112122θπϕθπw a = 2)回程运动规律:正弦加速度运动公式可得⎥⎦⎤⎢⎣⎡+-=)2sin(211322T h s Tθππθ ⎥⎦⎤⎢⎣⎡--=)2cos(1v322T hw θπθ )2sin(2a32222T hw θπθπ-=试中:T=)(s θθϕ+1- 经带入计算可得:s1 = 0.035*(1 - cos(1.5*x));v1=0.105/2 * w * sin(1.5 * x);a1 = 0.1575/2 * w^2 .* cos(1.5*x);s3 = 0.070*(3 - 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi));v3 = -0.140/pi * w .* (1 - cos(4*z - 4* pi));a3 = 0.56 * w^2/pi .*sin(4*z - 4* pi);三 计算程序(matlab )(1)推杆位移、速度、加速度线图编程;a.位移与转角曲线w = 2*pi/3x = 0:(pi/100):(2*pi/3);s1 = 0.035*(1 - cos(1.5*x));v1=0.105/2 * w * sin(1.5 * x);a1 = 0.1575/2 * w^2 .* cos(1.5*x);y = (2*pi/3):(pi/100):(pi);s2 = 0.070;v2=0;a2 = 0;z = (pi ):(pi/100):(3*pi/2);s3 = 0.070*(3 - 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi)); v3 = -0.140/pi * w .* (1 - cos(4*z - 4* pi));a3 = 0.56 * w^2/pi .*sin(4*z - 4* pi);c = (3*pi/2):(pi/100):( 2*pi);s4 = 0;v4 = 0;a4 = 0;plot(x,s1,'b',y,s2,'b',z,s3,'b',c,s4,'b')xlabel('转角/rad')ylabel('位移/m/')title('位移与转角曲线')b.速度与转角曲线w = 2*pi/3x = 0:(pi/100):(2*pi/3);s1 = 0.035*(1 - cos(1.5*x));v1=0.105/2 * w * sin(1.5 * x);a1 = 0.1575/2 * w^2 .* cos(1.5*x);y = (2*pi/3):(pi/100):(pi);s2 = 0.070;v2=0;a2 = 0;z = (pi ):(pi/100):(3*pi/2);s3 = 0.07*(3 - 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi)); v3 = -0.140/pi * w .* (1 - cos(4*z - 4* pi));a3 = 0.56 * w^2/pi .*sin(4*z - 4* pi);c = (3*pi/2):(pi/100):( 2*pi);s4 = 0;v4 = 0;a4 = 0;plot(x,v1,'g',y,v2,'g',z,v3,'g ',c,v4,'g')xlabel('转角/rad')ylabel('速度/(m/s)')title('速度与转角曲线')c.加速度与位移转角曲线w = 2*pi/3x = 0:(pi/100):(2*pi/3);s1 = 0.035*(1 - cos(1.5*x));v1=0.105/2 * w * sin(1.5 * x);a1 = 0.1575/2 * w^2 .* cos(1.5*x);y = (2*pi/3):(pi/100):(pi);s2 = 0.070;v2=0;a2 = 0;z = (pi):(pi/100):(3*pi/2);s3 = 0.070*(3 - 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi)); v3 = -0.140/pi * w .* (1 - cos(4*z - 4* pi));a3 = 0.56 * w^2/pi .*sin(4*z - 4* pi);c = (3*pi/2):(pi/100):( 2*pi);s4 = 0;v4 = 0;a4 = 0;plot(x,a1,'r',y,a2,'r',z,a3,'r ',c,a4,'r')xlabel('转角/rad')ylabel('加速度/(m^2/s)')title('加速度与转角曲线')(2)凸轮机构的s d -ϕds 线图编程; w = 2*pi/3x = 0:(pi/100):(2*pi/3);s1 = 35*(1 - cos(1.5*x));news1 = 35*1.5*sin(1.5*x);y = (2*pi/3):(pi/100):(pi);s2 = 70;news2 = 0;z = (pi ):(pi/100):(3*pi/2);s3=70*(3 - 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi));news3 =-140/pi * w .* (1 - cos(4*z - 4* pi));c = (3*pi/2):(pi/100):( 2*pi);s4 = 0;news4 = 0;plot(news1,s1,'b',news2,s2,'b',news3,s3,'b',news4,s4,'b')xlabel('ds/dp');ylabel('(位移s/mm)')title('ds/dp 与位移s 曲线') grid(3)确定基圆半径和偏距;(4)经过对凸轮机构的s d -ϕds 线图分析确定其偏距e=17,s=70,基圆半径r0=32,,得s0=50; a.先求凸轮理论轮廓曲线,程序如下:w = 2*pi/3;s0 = 50;s = 70;e = 17;x = 0:(pi/100):(2*pi/3);x1 = (s + s0)*cos(x)-e*sin(x);y1 = (s0 + s)*sin(x) - e*cos(x);y = (2*pi/3):(pi/100):(pi);x2 = (s + s0)*cos(y)-e*sin(y);y2 = (s0 + s)*sin(y) - e*cos(y);z = (pi):(pi/100):(3*pi/2);x3 = (s + s0)*cos(z)-e*sin(z);y3 = (s0 + s)*sin(z) - e*cos(z);c = (3*pi/2):(pi/100):( 2*pi);x4 = (s + s0)*cos(c)-e*sin(c);y4 = (s0 + s)*sin(c) - e*cos(c);plot(x1,y1,'b',x2,y2,'b',x3,y3,'b',x4,y4,'b');xlabel('x/mm')ylabel('y/mm')title('理轮轮曲线')b.再通过该廓线求其最小曲率半径,程序如下:v=[];syms x1 x2 x3 x4 x5s0 = 50;e = 20;s1 = 35*(1 - cos(1.5*x1));t1 = (s1 + s0)*cos(x1)-e*sin(x1);y1 = (s0 + s1)*sin(x1) - e*cos(x1);tx1=diff(t1,x1);txx1=diff(t1,x1,2);yx1=diff(y1,x1);yxx1=diff(y1,x1,2);for xx1= 0:(pi/100):(2*pi/3);k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1}); v=[v,1/k1];ends2 = 70;t2 = (s2 + s0)*cos(x2)-e*sin(x2);y2 = (s0 + s2)*sin(x2) - e*cos(x2);tx2=diff(t2,x2);txx2=diff(t2,x2,2);yx2=diff(y2,x2);yxx2=diff(y2,x2,2);for xx2=(2*pi/3):(pi/100):(pi);k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2}); v=[v,1/k2];ends3 = 110*(10/3- 2*x3/pi + 1/(2*pi).*sin (4*x3 - 14* pi/3));t3 = (s3 + s0)*cos(x3)-e*sin(x3);y3 = (s0 + s3)*sin(x3) - e*cos(x3);tx3=diff(t3,x3);txx3=diff(t3,x3,2);yx3=diff(y3,x3);yxx3=diff(y3,x3,2);for xx3=(pi):(pi/100):(3*pi/2);k3=subs(abs((tx3*yxx3-txx3*yx3)/(tx3^2+yx3^2)^1.5),{x3},{xx3}); v=[v,1/k3];ends4 = 0;t4 = (s4 + s0)*cos(x4)-e*sin(x4);y4 = (s0 + s4)*sin(x4) - e*cos(x4);tx4=diff(t4,x4);txx4=diff(t4,x4,2);yx4=diff(y4,x4);yxx4=diff(y4,x4,2);for xx4=(3*pi/2):(pi/100):( 2*pi);k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4}); v=[v,1/k4];endmin(v)(3)凸轮的理论廓线和其包络线;由基圆半径确定其滚子的半径为r=8mm,其他参数保持不变;a.凸轮的理论廓线w = 2*pi/3;s0 = 50;s = 70;e = 17;x = 0:(pi/100):(2*pi/3);x1 = (s + s0)*cos(x)-e*sin(x);y1 = (s0 + s)*sin(x) - e*cos(x);y = (2*pi/3):(pi/100):(pi);x2 = (s + s0)*cos(y)-e*sin(y);y2 = (s0 + s)*sin(y) - e*cos(y);z = (pi ):(pi/100):(3*pi/2);x3 = (s + s0)*cos(z)-e*sin(z);y3 = (s0 + s)*sin(z) - e*cos(z);c = (3*pi/2):(pi/100):( 2*pi);x4 = (s + s0)*cos(c)-e*sin(c);y4 = (s0 + s)*sin(c) - e*cos(c);plot(x1,y1,'b',x2,y2,'b',x3,y3,'b',x4,y4,'b');xlabel('x/mm')ylabel('y/mm')title('理轮轮曲线')b.凸轮的包络线w = 2*pi/3;s0 = 50;e = 17;r = 8;x = 0:(pi/100):(2*pi/3);s1 = 35*(1 - cos(1.5*x));x1 = (s1 + s0).*cos(x) - e*sin(x);y1 = (s0 + s1).*sin(x) - e*cos(x);n1 = -(35*1.5*sin(x) + s0).*sin(x) -e*cos(x);m1 = (s0 + 35*1.5*sin(x) ).*cos(x) + e*sin(x);xt1 = x1+(r*m1)./(sqrt(n1.^2+m1.^2));yt1 = y1 - (r*n1)./sqrt(m1.^2 +n1.^2);xw1 = x1 - (r*m1)./sqrt(m1.^2 +n1.^2);yw1 = y1 + (r*n1)./sqrt(m1.^2 +n1.^2);y = (2*pi/3):(pi/100):(pi);s2 = 70;x2 = (s2 + s0).*cos(y)-e*sin(y);y2 = (s0 + s2).*sin(y) - e*cos(y);n2 = -s0.*sin(y)-e*cos(y);m2 = s0 .*cos(y) + e*sin(y);xt2 = x2 + (r*m2)./sqrt(m2.^2+n2.^2);yt2 = y2 - (r*n2)./sqrt(m2.^2+n2.^2);xw2 = x2 - (r*m2)./sqrt(m2.^2+n2.^2);yw2 = y2 + (r*n2)./sqrt(m2.^2+n2.^2);z = (pi ):(pi/100):(3*pi/2);s3 = 70*(3- 2*z/pi + 1/(2*pi).*sin (4*z - 4* pi));x3 = (s3 + s0).*cos(z)-e*sin(z);y3 = (s0 + s3).*sin(z) - e*cos(z);n3 = -(140/pi *cos(4*z - 4*pi) + s0).*sin(z)-e*cos(z); m3 = (s0 + 140/pi *cos(4*z - 4*pi)).*cos(z) + e*sin(z);xt3= x3 + (r*m3)./sqrt(m3.^2+n3.^2);yt3 = y3 - (r*n3)./sqrt(m3.^2+n3.^2);xw3 = x3 -(r* m3)./sqrt(n3.^2+m3.^2);yw3 = y3 + (r*n3)./sqrt(n3.^2+m3.^2);c = (3*pi/2):(pi/100):( 2*pi);s4 = 0;x4 = (s4 + s0).*cos(c)-e*sin(c);y4 = s0 .*sin(c) - e*cos(c);n4 = - s0.*sin(c)-e*cos(c);m4 = s0 .*cos(c) + e*sin(c);xt4= x4 + (r*m4)./sqrt(m4.^2+n4.^2);yt4 = y4 - (r*n4)./sqrt(m4.^2+n4.^2);xw4 = x4 - (r*m4)./sqrt(n4.^2+m4.^2);yw4 = y4 + (r*n4)./sqrt(n4.^2+m4.^2);plot(xw1,yw1,'b',xw2,yw2,'b',xw3,yw3,'b',xw4,yw4,'b') xlabel('x/mm')ylabel('y/mm')title('凸轮的包络线')grid。
机械原理大作业凸轮结构设计
机械原理大作业(二) 作业名称:机械原理设计题目:凸轮机构设计院系: 机电工程学院班级:设计者:学号:指导教师:丁刚陈明设计时间:哈尔滨工业大学机械设计1、设计题目如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。
表一:凸轮机构原始参数序号升程(mm) 升程运动角(º)升程运动规律升程许用压力角(º)回程运动角(º)回程运动规律回程许用压力角(º)远休止角(º)近休止角(º)12 80 150正弦加速度30 100 正弦加速度60 60 502、凸轮推杆运动规律(1)推杆升程运动方程S=h[φ/Φ0-sin(2πφ/Φ0)]V=hω1/Φ0[1-cos(2πφ/Φ0)]a=2πhω12sin(2πφ/Φ0)/Φ02式中:h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算)(2)推杆回程运动方程S=h[1-T/Φ1+sin(2πT/Φ1)/2π]V= -hω1/Φ1[1-cos(2πT/Φ1)]a=-2πhω12sin(2πT/Φ1)/Φ12式中:h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/63、运动线图及凸轮线图运动线图:用Matlab编程所得源程序如下:t=0:pi/500:2*pi;w1=1;h=150;leng=length(t);for m=1:leng;if t(m)<=5*pi/6S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi));v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6);a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6));% 求退程位移,速度,加速度elseift(m)<=7*pi/6S(m)=h;v(m)=0;a(m)=0;% 求远休止位移,速度,加速度elseif t(m)<=31*pi/18T(m)=t(m)-21*pi/18;S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi));v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9)));a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9));%求回程位移,速度,加速度elseS(m)=0;v(m)=0;a(m)=0;% 求近休止位移,速度,加速度endend推杆位移图推杆速度图推杆加速度图4、确定凸轮基圆半径与偏距在凸轮机构得ds/dφ-s线图里再作斜直线Dt dt与升程得[ds/dφ-s(φ)]曲线相切并使与纵坐标夹角为升程许用压力角[α],则D t d t线得右下方为选择凸轮轴心得许用区。
西工大机械原理大作业2凸轮机构作业

西工大机械原理大作业2凸轮机构作业摘要:凸轮机构是机械传动中十分重要的一种机构,它通过凸轮的回转运动将直线运动或其他运动转化为需要的曲线运动。
本文将对凸轮机构的结构和工作原理进行详细介绍,并以汽车发动机中凸轮机构为例进行分析。
通过本次作业的学习,可以更好地理解和应用凸轮机构的原理。
关键词:凸轮机构、结构、工作原理、汽车发动机一、引言凸轮机构是一种将直线运动或其他运动转化为需要的曲线运动的机构。
它广泛应用于各种机械传动中,尤其在汽车发动机中扮演着重要的角色。
凸轮机构能够将发动机的气缸活塞的直线往复运动转化为曲轴的回转运动,从而实现汽缸进、排气门的开闭。
凸轮机构还广泛应用于各种机械设备中,如机床、印刷机等。
因此,对凸轮机构的学习和掌握是十分重要的。
二、凸轮机构的结构和工作原理凸轮机构主要由凸轮、凸轮轴和从动件等组成。
凸轮是一个平面上的旋转曲线,它通过与凸轮轴的配合将转动运动转化为需要的曲线运动。
从动件则是根据需要进行曲线运动的机构组成部分,如气缸活塞、机床刀架等。
凸轮的工作原理是通过其凸轮轴的旋转将自身上的凸点或凹槽与从动件相配合,从而实现曲线运动。
当凸轮轴旋转时,凸轮上的凸点或凹槽与从动件相接触,从而驱动从动件做曲线运动。
凸轮机构的运动规律可以通过凸轮的轮廓形状来确定,因此,在设计凸轮机构时,需要根据所需要的运动曲线来确定凸轮的形状和参数。
三、汽车发动机中的凸轮机构汽车发动机中的凸轮机构是一个非常典型的凸轮机构应用案例。
它通过凸轮的回转运动来驱动气缸活塞做往复运动,并控制气缸进、排气门的开闭。
凸轮机构通过凸轮轴上的凸点和凹槽与气门机构相连接,从而实现曲线运动。
汽车发动机中的凸轮机构一般由凸轮轴、凸轮、气门弹簧、气门和凸轮轴链条组成。
凸轮轴位于汽车发动机的上部,凸轮装在凸轮轴上,通过气门弹簧与气门相连接。
当凸轮轴旋转时,凸轮上的凸点或凹槽与气门弹簧相接触,从而控制气门的开闭,进而控制气缸的进、排气。
《机械原理》第四章凸轮机构与其设计
标准传动函数介绍
刚性机构的输入参数x转变为输出参数y仅 与机构几何学有关。此关系在数学上理解 为机构的传动函数y=y(x)
标准传动函数f(z)的单位为1,满足定义域 z∈[0,1],值域f(z) ∈[0,1],且满足边界条 件f(0)=0, f(1)=1。
当满足f(z)=1-f(1-z)时为对称标准传动函 数。
基本概念
行程
从动件往复运动的最大 位移,用h表示。
10/16/2020
第四章 凸轮机构及其设计
基本概念
推程
从动件背离凸轮轴心运 动的行程。
推程运动角
与推程对应的凸轮转角。
10/16/2020
第四章 凸轮机构及其设计
基本概念
回程
从动件向着凸轮轴心运 动的行程。
回程运动角
与回程对应的凸轮转角。
Knowledge Points
凸轮机构的组成 凸轮机构的分类 凸轮机构的优点、缺点
10/16/2020
第四章 凸轮机构及其设计
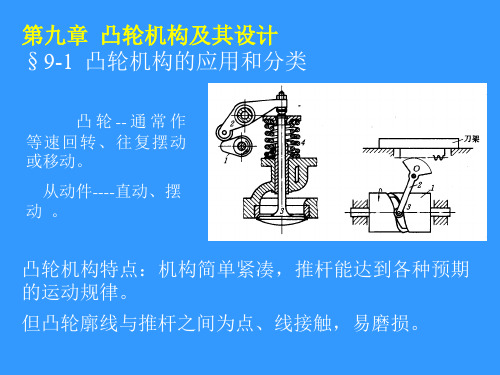
凸轮机构的组成
凸轮是具有曲线轮廓 或凹槽的构件
凸轮机构一般由凸轮、 从动件和机架三个构 件组成。
10/16/2020
第四章 凸轮机构及其设计
凸轮机构的分类
按照凸轮的形状分类 按照从动件的型式分
形锁合
所谓形锁合型,是指 利用高副元素本身的 几何形状使从动件与 凸轮轮廓始终保持接 触。
10/16/2020
第四章 凸轮机构及其设计
凸轮机构的优点
结构简单、紧凑,占据空间较小;具有多 用性和灵活性,从动件的运动规律取决于 凸轮轮廓曲线的形状。对于几乎任意要求 的从动件的运动规律,都可以毫无困难地 设计出凸轮廓线来实现。
10/16/2020
机械原理考试要点
思考题1.什么是运动副?什么是低副?什么是高副?其优缺点? 常用平面运动副有哪几种?2.构件与零件有何区别和联系?举出日常生活中只有一个零件的构件和由多个零件组成一个构件的例子(各一个,画出其结构草图)。
实验一: 机构认知实验1.何谓开式运动链? 何谓闭式运动链? 运动链与机构有何区别?2.机构具有确定运动的条件?实验二: 机构运动简图的测绘与分析作业:2-1、2-2、2-3、2-51.既然虚约束对机构的运动实际上不起约束作用,那么在实际机构中为什么又常常存在虚约束?——为了改善机构的受力情况,增加机构刚度或保证机械运动能顺利通过转折点(如机构的死点)等2.何谓机构的组成原理?何谓基本杆组?如何确定基本杆组的级别和机构的级别?3.为何要进行高副低代?高副低代应满足何条件?大作业1: 实际机械运动简图的测绘与分析大作业2:简单机构或机构创意设计与模型制作作业:2-6、2-8、2-101.什么是速度瞬心?速度瞬心有几种?各有何不同?如何应用速度瞬心作机构的速度分析?2.何谓三心定理?什么样的瞬心需要用三心定理求?作业: 3-1、3-2、3-31.何谓矢量方程图解法?如何应用矢量方程图解法作机构的速度和加速度分析?以理论力学中的刚体平面运动和点的复合运动为理论基础,按照相对运动的矢量方程式,用一定的比例尺画出相应的矢量多边形,由此确定机构上各点的速度和加速度以及构件的角速度和角加速度。
2.速度多边形和加速度多边形有何特征?3.同一构件上已知两点运动求第三点的简便方法?实验三: 机构运动参数的测定与分析(选做)1.如何用杆矢量表示构件?2.用解析法进行平面机构的运动分析的关键是什么?——建立机构位置矢量封闭方程式大作业3:用矢量方程图解法作六杆机构一个位置的运动分析教材P54 例3-1 当主动件1位于30°或60°时的机构运动分析。
(用8K复印纸或3#图纸)大作业4:用解析法作P54 例3-1六杆机构一个运动循环的运动分析 (选做)1.何为机构的动态静力分析?2.惯性力(矩)的方向如何确定?作业: 4-1、4-5、4-61.何谓当量摩擦系数?引入当量摩擦系数的目的?——是将移动副元素为其他几何形状的摩擦转化为平面摩擦时与平面摩擦相当的摩擦因数(系数),引入当量摩擦系数的概念是为了使问题简化。
机械原理大作业凸轮机构题DOC

Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:连杆机构运动分析院系:机械设计制造及其自动化班级:设计者:学号:指导教师:设计时间:一.设计题目设计直动从动件盘形凸轮机构,凸轮机构原始参数 序号 升程(mm) 升程运动角(º) 升程运 动规律升程许用压力角(º) 回程运动角(º)回程运 动规律回程许用压力角(º)远休止角 (º)近休止角 (º) 22 120 90等加等减速 4080等减等加速 70 70120二. 凸轮推杆运动规律1.运动规律(等加速等减速运动) 推程 0450≤≤ϕ2229602ϕπϕ=⎪⎪⎭⎫ ⎝⎛Φ=h s ϕπωϕω2219204=Φ=h v2220219204πωω=Φ=h a 推程 009045≤≤ϕ()222020)2(9601202ϕππϕ--=-ΦΦ-=hh s())2(1920422ϕπωπϕω-=-ΦΦ=h v222219204ωπω-=Φ-=h a2.运动规律(等加速等减速运动) 回程 00200160≤≤ϕ ()[]2222)98(9601202πϕπϕ--=Φ+Φ-Φ-=S h h s ()[])98(1920-4-22πϕωπϕω-=Φ+Φ-Φ=S h v 222219204ωπω-=Φ-=h a回程 00240200≤≤ϕ ()[]222'002)34(9602ϕππϕ-=-Φ+Φ+ΦΦ=S h s ()[])34(1920-4-2'002ϕπωπϕω-=-Φ+Φ+ΦΦ=S h v222219204ωπω=Φ=h a三.推杆位移、速度、加速度线图及凸轮s d ds-φ线图采用VB 编程,其源程序及图像如下: 1.位移:Private Sub Command1_Click()Timer1.Enabled = True '开启计时器 End SubPrivate Sub Timer1_Timer() Static i As SingleDim s As Single, q As Single 'i 作为静态变量,控制流程;s 代表位移;q 代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = is = 240 * (q / 90) ^ 2Picture1.PSet Step(q, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = is = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2)Picture1.PSet Step(q, -s), vbGreenElseIf i >= 90 And i <= 150 Thenq = is = 120Picture1.PSet Step(q, -s), vbBlackElseIf i >= 150 And i <= 190 Thenq = is = 120 - 240 * (q - 150) ^ 2 / 6400Picture1.PSet Step(q, -s), vbBlueElseIf i >= 190 And i <= 230 Thenq = is = 240 * (230 - q) ^ 2 / 6400Picture1.PSet Step(q, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = is = 0Picture1.PSet Step(q, -s), vbBlackElseEnd IfEnd Sub2.速度Private Sub Command2_Click()Timer2.Enabled = True '开启计时器End SubPrivate Sub Timer2_Timer()Static i As SingleDim v As Single, q As Single, w As Single 'i为静态变量,控制流程;q代表角度;w代表角速度,此处被赋予50Picture1.CurrentX = 0Picture1.CurrentY = 0w = 50i = i + 0.1If i <= 45 Thenq = iv = 480 * w * q / 8100Picture1.PSet Step(q, -v), vbRedElseIf i >= 45 And i <= 90 Thenq = iv = 480 * w * (90 - q) / 8100Picture1.PSet Step(q, -v), vbBlack ElseIf i >= 90 And i <= 150 Thenq = iv = 0Picture1.PSet Step(q, -v), vbGreen ElseIf i >= 150 And i <= 190 Then q = iv = -480 * w * (q - 150) / 6400Picture1.PSet Step(q, -v), vbBlue ElseIf i >= 190 And i <= 230 Thenq = iv = -480 * w * (230 - q) / 6400Picture1.PSet Step(q, -v), vbRedElseIf i >= 230 And i <= 360 Then q = iv = 0Picture1.PSet Step(q, -v), vbBlack ElseEnd IfEnd Sub3.加速度Private Sub Command3_Click()Timer3.Enabled = True '开启计时器End SubPrivate Sub Timer3_Timer()Static i As SingleDim a As Single, w As Single, q As Single 'i为静态变量,控制流程;a代表加速度;q代表角度;w代表角速度w = 50Picture1.CurrentX = 0Picture1.CurrentY = 0i = i + 0.1If i <= 45 Thenq = ia = 480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbRedElseIf i >= 45 And i <= 90 Thenq = ia = -480 * w ^ 2 / 8100Picture1.PSet Step(q, -a), vbBlackElseIf i >= 90 And i <= 150 Thenq = ia = 0Picture1.PSet Step(q, -a), vbGreenElseIf i >= 150 And i <= 190 Thenq = ia = -480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbBlueElseIf i >= 190 And i <= 230 Thenq = ia = 480 * w ^ 2 / 6400Picture1.PSet Step(q, -a), vbRedElseIf i >= 230 And i <= 360 Thenq = ia = 0Picture1.PSet Step(q, -a), vbBlackElseEnd IfEnd Sub4.ds/dq---dsPrivate Sub Command4_Click()Timer4.Enabled = True '开启计时器;建立坐标系Picture1.Scale (-400, -400)-(400, 400)End SubPrivate Sub Timer4_Timer()Static i As SingleDim x As Single, s As Single, q As Single, scaley As Single, t As Single 'i为静态变量,控制流程;x代表位移;s代表纵坐标ds/dq;q代表角度Picture1.CurrentX = 0Picture1.CurrentY = 0scaley = 1t = 3.14 / 180i = i + 0.1If i <= 45 Thenq = i * tx = 194.734 * qs = 240 * (2 * q / 3.14) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 45 And i <= 90 Thenq = i * tx = 194.734 * (3.14 / 2 - q)s = 120 - 97.367 * (3.14 / 2 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 90 And i <= 150 Thenq = i * tx = 0s = 120 * scaleyPicture1.PSet Step(x, -s), vbRedElseIf i >= 150 And i <= 190 Thenq = i * tx = -246.46 * (q - 5 * 3.14 / 6)s = 120 - 123.23 * (q - 5 * 3.14 / 6) ^ 2 Picture1.PSet Step(x, -s), vbRedElseIf i >= 190 And i <= 230 Thenq = i * tx = -246.46 * (23 * 3.14 / 18 - q)s = 123.23 * (23 * 3.14 / 18 - q) ^ 2Picture1.PSet Step(x, -s), vbRedElseIf i >= 230 And i <= 360 Thenq = i * tx = 0s = 0Picture1.PSet Step(x, -s), vbRedElseEnd IfEnd Sub四.确定凸轮基圆半径和偏距1. 求切点转角在图中,右侧曲线为升程阶段的类速度-位移图,作直线Dt dt与其相切,且位移轴正方向呈夹角[ 1]=300,则切点处的斜率与直线D t d t的斜率相等,因为kDtdt=tan600,右侧曲线斜率可以表示为:q;q=tan600继而求出切点坐标(337.272,292.084)。
机械原理大作业-凸轮机构
二、凸轮机构一、运动分析凸轮的运动分为4个阶段:推程运动、远休程、回程运动、近休程。
该凸轮机构4个阶段的运动角分别为推程运动角90˚、远休止角100 ˚、回程运动角50 ˚、近休止角120 ˚。
推程运动阶段的运动规律为正弦加速度运动,回程运动的运动规律为4-5-6-7多项式运动。
凸轮的简图如图1所示。
图1对该机构进行简单的运动分析:1.升程阶段采用正弦加速度的运动规律,从动件的位移、速度、加速度、压力角的计算公式如下:计算时将相应的量带入公式即可得到。
类速度可以直接将位移方程对凸轮转角ϕ求导得到。
2.远休程阶段的位移不变,与凸轮升程阶段最后的位移相等,速度、加速度则变为0。
3.回程阶段位移、速度、加速度可通过代入4-5-6-7多项式的方程求得。
4.近休程阶段的位移与回程阶段最后的位移相等,且为0,速度、加速度均变为0.二、流程框图图2三、运用VC编程#include<stdio.h>#include<math.h>#define pi 3.141592654 //定义全局变量int main() //主函数{int i,j,k,l;double s; //定义位移量double v; //定义速度量double a; //定义加速度量double r; //定义弧度制角度量double d,o,m,t=40,x1,x2,y1,y2,d1,d2; //定义中间变量double p; //定义角度制角度量double w=1; //定义并角速度量赋值double R=50; //定义基圆半径double e=30; //定义偏距double n; //定义压力角double u; //定义曲率半径double Rr=17; //定义滚子半径并赋值double x,y,X,Y; //定义实际与理论廓线上点的坐标r=0;for(i=0;i<20;i++){s=20/pi*(4*r-sin(4*r));x=-(t+s)*sin(r)-e*cos(r);y=(t+s)*cos(r)-e*sin(r);d1=-(s+t)*cos(r)+e*sin(r);d2=-(s+t)*sin(r)-e*cos(r);X=x-Rr*d2/pow(d1*d1+d2*d2,0.5);Y=y+Rr*d1/pow(d1*d1+d2*d2,0.5);d=80/pi*(1-cos(4*r));v=80/pi*(1-cos(4*r));a=320/pi*sin(4*r);m=atan(fabs(d-e)/(s+t));n=180*m/pi;x1=(t+s)*cos(r)+v/w*sin(r)-e*sin(r);y1=-(t+s)*sin(r)+v/w*cos(r)-e*cos(r);x2=-(t+s)*sin(r)+v/w*cos(r)+a/(w*w)*sin(r)+v/w*cos(r)-e*cos(r);y2=-(t+s)*cos(r)-v/w*sin(r)+a/(w*w)*cos(r)-v/w*sin(r)+e*sin(r);u=pow(x1*x1+y1*y1,1.5)/fabs(x1*y2-y1*x2);r=r+pi/40;p=180/pi*r;printf("%lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf\n", p,s,v,a,d,n,u,x,y,X,Y);}r=pi/2;for(j=0;j<5;j++){s=s;x=-(t+s)*sin(r)-e*cos(r);y=(t+s)*cos(r)-e*sin(r);d1=-(s+t)*cos(r)+e*sin(r);d2=-(s+t)*sin(r)-e*cos(r);X=x-Rr*d2/pow(d1*d1+d2*d2,0.5);Y=y+Rr*d1/pow(d1*d1+d2*d2,0.5);d=0;v=0;a=0;m=atan(fabs(d-e)/(s+t));n=180*m/pi;x1=(t+s)*cos(r)+v/w*sin(r)-e*sin(r);y1=-(t+s)*sin(r)+v/w*cos(r)-e*cos(r);x2=-(t+s)*sin(r)+v/w*cos(r)+a/(w*w)*sin(r)+v/w*cos(r)-e*cos(r);y2=-(t+s)*cos(r)-v/w*sin(r)+a/(w*w)*cos(r)-v/w*sin(r)+e*sin(r);u=pow(x1*x1+y1*y1,1.5)/fabs(x1*y2-y1*x2);r=r+pi/9;p=180/pi*r;printf("%lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf\n", p,s,v,a,d,n,u,x,y,X,Y);}r=(19*pi)/18;for(k=0;k<20;k++){o=(18*r-19*pi)/(5*pi);s=40*(1-35*pow(o,4)+84*pow(o,5)-70*pow(o,6)+20*pow(o,7));x=-(t+s)*sin(r)-e*cos(r);y=(t+s)*cos(r)-e*sin(r);d1=-(s+t)*cos(r)+e*sin(r);d2=-(s+t)*sin(r)-e*cos(r);X=x-Rr*d2/pow(d1*d1+d2*d2,0.5);Y=y+Rr*d1/pow(d1*d1+d2*d2,0.5);d=18*40/5/pi*(-35*4*pow(o,3)+84*5*pow(o,4)-70*6*pow(o,5)+20*7*pow(o,6));v=-80/pi*(140*pow(o,3)-420*pow(o,4)+420*pow(o,5)-140*pow(o,6));a=-160/pi*(420*pow(o,2)-1680*pow(o,3)+2100*pow(o,4)-840*pow(o,5));m=atan(fabs(d-e)/(s+t));n=180*m/pi;x1=(t+s)*cos(r)+v/w*sin(r)-e*sin(r);y1=-(t+s)*sin(r)+v/w*cos(r)-e*cos(r);x2=-(t+s)*sin(r)+v/w*cos(r)+a/(w*w)*sin(r)+v/w*cos(r)-e*cos(r);y2=-(t+s)*cos(r)-v/w*sin(r)+a/(w*w)*cos(r)-v/w*sin(r)+e*sin(r);u=pow(x1*x1+y1*y1,1.5)/fabs(x1*y2-y1*x2);r=r+pi/72;p=180/pi*r;printf("%lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf\n", p,s,v,a,d,n,u,x,y,X,Y);}r=(4*pi)/3;for(l=0;l<5;l++){s=s;x=-(t+s)*sin(r)-e*cos(r);y=(t+s)*cos(r)-e*sin(r);d1=-(s+t)*cos(r)+e*sin(r);d2=-(s+t)*sin(r)-e*cos(r);X=x-Rr*d2/pow(d1*d1+d2*d2,0.5);Y=y+Rr*d1/pow(d1*d1+d2*d2,0.5);d=0;v=0;a=0;m=atan(fabs(d-e)/(s+t));n=180*m/pi;x1=(t+s)*cos(r)+v/w*sin(r)-e*sin(r);y1=-(t+s)*sin(r)+v/w*cos(r)-e*cos(r);x2=-(t+s)*sin(r)+v/w*cos(r)+a/(w*w)*sin(r)+v/w*cos(r)-e*cos(r);y2=-(t+s)*cos(r)-v/w*sin(r)+a/(w*w)*cos(r)-v/w*sin(r)+e*sin(r);u=pow(x1*x1+y1*y1,1.5)/fabs(x1*y2-y1*x2);r=r+2*pi/15;p=180/pi*r;printf("%lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf\n", p,s,v,a,d,n,u,x,y,X,Y);}return 0;}四、计算结果处理1.输出数据位移s、速度v、加速度a、类速度ds/dϕ、压力角α、曲率半径ρ(其中曲率半径缺失的数据为太大而不合题意的数据,已将其舍去):表1凸轮轮廓:理论廓线坐标、实际廓线坐标:表22.根据输出数据做出图像:图2图3图4图5图6图7图8。
机械原理_孙恒_西北工业大学版第9章凸轮机构及其设计
3. 推杆滚子半径的选择和推杆平底尺寸的确定 (1) 滚子推杆滚子半径确定
内凹凸轮:
rr 外凸凸轮: a rr
a
当 , rr , a 0 变尖
rr , a 0 失真
应使: 一般
rr min
min 1 ~ 5mm
rr (0.1 ~ 0.5)r0
1、常用运动规律
1.1 多项式运动规律
S C0 C1 C 2 C n
2
n
δ----凸轮转角 ; S----推杆位移 ; C0、C1、C2…待定系数(常数),由边界条件确定。
(1)一次多项式运动规律 凸轮以ω 等角速转动,推程时,凸轮运动角δ 0,行程 h S C 0 C1 确定边界条件: 起始点: δ=0 ,h=0 v ds / dt C1 终点: δ=δ0 , S=h 则有:C0=0 ,C1=h/δ 0 a dv / dt 0
“-”用于内等距曲线;“+”用 于外等距曲线。
式(9-15)中e为代数值,其正、负的规定:
若凸轮逆时针转,推杆处于右侧,e为正,反之为负; 若凸轮顺时针转,情况则相反。
② 对心平底推杆盘形凸轮机构解析法设计 (图9-21)(略) ③ 摆动滚子推杆盘形凸轮机构解析法设计 (图9-22)(略)
§9-4 凸轮机构基本尺寸的确定 1. 压力角问题 ---凸轮机构的压力角(为 推杆所受正压力的方向与推 杆上点B的速度方向之间所 夹的锐角)
5 0
1.2 三角函数运动规律 (1)余弦加速度运动规律(简谐运动规律) 其推程时的运动方程:
v h sin( / 0 ) /( 2 0 ) 2 2 2 a h cos( / 0 ) /( 2 0 ) S h[1 cos( / 0 )] / 2
哈工大机械原理大作业二凸轮机构
void main()
{
float fi=0,fi0=90,h=100,S=0,v=0,a=0,fis=110,fi01=80,fis1=80,T2=0,w1=10,A=0,B=0,v0=0,v01=0,v02=0,f11=30,f31=70,A11=0,A12=0,B11=0,B12=0,A21=0,A22=0,B21=0,C11=0,C21=0,W=0;
{
W=fi*2*PI/360.0;
if(fi<=90)
{
S=h*(W/fi0-(1/(2*PI))*sin((2*PI/fi0)*W));
v=(h*w1/fi0)*(1-cos((2*PI/fi0)*W));
a=(2*PI*h*w1*w1/(fi0*fi0))*sin(2*PI*W/fi0);
}
elseif(fi>=90&&fi<200)
{
A=90;
A=A*2*PI/360.0;
S=h*(A/fi0-(1/(2*PI))*sin((2*PI/fi0)*A));
v=(h*w1/fi0)*(1-cos((2*PI/fi0)*A));
a=(2*PI*h*w1*w1/(fi0*fi0))*sin(2*PI*A/fi0);
}
elseif(fi>=200&&fi<=280)
}
printf("%f\n",a);
}
}
此程序计算推杆位移,速度,加速度线图。
程序二:
#include "stdio.h"
#include "math.h"
机械原理凸轮机构
机械原理—凸轮机构 机械原理 凸轮机构
第19章 凸轮机构 19章
凸轮机构的组成和类型 从动件常用的运动规律 凸轮廓线设计 凸轮机构基本尺寸设计
机械原理—凸轮机构 机械原理 凸轮机构 19.2 从动件常用的运动规律 19.2.1 凸轮机构的工作循环
机械原理—凸轮机构 机械原理 凸轮机构
滚子移动 平底移动 滚子摆动 方法、 方法、步骤与上述的滚子移动从动件盘形凸轮 廓线的设计基本相同。 廓线的设计基本相同。
机械原理—凸轮机构 机械原理 凸轮机构
小结
1. 基本原理——反转法 2. 图解法设计凸轮廓线
(1)尖底 (2)滚子 (3)平底 (4)摆动
3. 解析法设计凸轮廓线(理论、实际廓线方程)
机械原理—凸轮机构 机械原理 凸轮机构 19.3.3 解析法设计凸轮轮廓
滚子移动 平底移动 滚子摆动 理论廓线方程:
① 画出基圆、偏距圆和从动件的 初始位置; ② 选择直角坐标系Oxy; ③ 将从动件连同导路沿(-ω) 方向转过任意角φ;
机械原理—凸轮机构 机械原理 凸轮机构 19.3.3 解析法设计凸轮轮廓
机械原理—凸轮机构 机械原理 凸轮机构 第19章 凸轮机构 章
凸轮机构的组成和类型 从动件常用的运动规律 凸轮廓线设计 凸轮机构基本尺寸设计
机械原理—凸轮机构 机械原理 凸轮机构 19.1 凸轮机构的组成与类型 19.1.1 凸轮机构的组成
基本构件
{
凸轮(cam) 从动件(follower) follower 机架(frame)
机械原理—凸轮机构 机械原理 凸轮机构 压力角与许用值
推 : ] = 30°(移 ), 程 [α 动 [α] = 45°(摆 ) 动 回 : ] = 80° 程 [α =80
机械原理课程设计凸轮机构

Part Three
机械原理课程设计 凸轮机构方案
设计目的和要求
设计目的:掌握凸轮机构的基本原 理和设计方法
设计内容:包括凸轮机构的设计、 制造、装配和调试
添加标题
添加标题
添加标题
添加标题
设计要求:满足凸轮机构的运动要 求,如速度、加速度、行程等
设计步骤:明确设计任务、选择设 计方案、进行设计计算、绘制设计 图纸、制作模型、进行实验验证等
凸轮轮廓曲线的设计方法包括解析法、图 解法和计算机辅助设计等。
凸轮轮廓曲线的设计需要满足凸轮机构 的运动规律、负载、速度、加速度等要 求,同时需要考虑到凸轮的制造工艺和 成本等因素。
凸轮机构压力角计算
压力角定义:凸轮与从动件接触点 处法线与凸轮轮廓线之间的夹角
压力角影响因素:凸轮轮廓线形状、 从动件形状、凸轮半径、从动件半 径
凸轮机构工作原理
凸轮机构通过凸轮与从动件 的接触,实现从动件的位移 和运动
凸轮机构由凸轮、从动件和 机架组成
凸轮机构的工作原理是利用 凸轮的轮廓曲线,使从动件
产生预定的运动
凸轮机构的应用广泛,如汽 车、机床、机器人等领域
凸轮机构分类
按照凸轮运动规律分类:等 速运动凸轮、等加速运动凸 轮、等减速运动凸轮等
Part Six
凸轮机构运动仿真 与优化
运动仿真模型的建立
确定凸轮机构的类型和参数 建立凸轮机构的三维模型 设定运动仿真的初始条件和边界条件 设定运动仿真的时间步长和仿真时间 设定运动仿真的输出变量和观察点 运行运动仿真,观察仿真结果,并进行优化
运动仿真结果分析
凸轮机构运动仿 真结果:包括位 移、速度、加速 度等参数
凸轮从动件的类 型:滚子从动件、 滑块从动件、圆 柱从动件等
机械设计基础凸轮机构

机械设计基础凸轮机构在机械设计中,凸轮机构是一种常见且重要的机械传动机构,它利用凸轮的凸缘与从动件(如滚子或柱塞)的凹槽相互作用,将旋转运动转换为直线运动或者其他特定的运动形式,广泛应用于各种机器和设备中。
下面将介绍凸轮机构的基本原理和常见类型,并探讨其在机械设计中的应用。
凸轮机构是一种基于凸轮运动的机械传动机构,其工作原理是通过凸轮的不规则形状使凹槽中的从动件产生预期的运动。
凸轮可以是一个圆柱体的一部分,也可以是一个分离的轴螺栓,并且可以具有各种形状的凸缘。
凹槽中的从动件可以是滚子、柱塞、针杆等。
凸轮机构常见的基本动作包括推动、提升、转动、倾斜、抛射等。
凸轮机构的工作过程中,凸轮的凸缘和从动件的凹槽在运动过程中不断接触和分离,从而实现所需的运动形式。
凸轮的凹槽形状和凸度的大小直接影响从动件的运动形态和速度。
在凸轮机构的设计中,需要考虑凸轮的基本形状、凹槽的形状和尺寸以及凸轮和从动件之间的相对位置等因素。
同时,还需要对从动件的负载、速度和运动惯量等进行估算和计算,以确保凸轮机构可以正常工作并满足设计要求。
凸轮机构在机械设计中有广泛的应用。
最常见的应用是在内燃机中,凸轮机构用于驱动气门的开启和关闭,控制燃气的进出,实现正常的运转。
此外,凸轮机构还可以用于机床上的工件夹持、印刷机上的纸张送纸、纺织机上的细纱传动等。
另外,凸轮机构还可以用于高精度和高速度的机械系统中。
例如,在印刷机上,凸轮机构被用来实现纸张进给、定位和印刷等动作,凸轮的凹槽形状和凸度的大小非常关键,以确保纸张的正确进给和精确的印刷位置。
此外,凸轮机构还可以通过改变凸轮的形状和凹槽的设计,实现多种复杂的运动形式。
例如,通过使用多个凸轮和从动件,可以实现复杂的步进运动、循环运动和连续运动。
这种应用在自动化生产线、工业机器人和动画制作等领域非常常见。
总而言之,凸轮机构作为一种常见的机械传动机构,通过凸轮的运动将旋转运动转换为直线运动或其他特定的运动形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大作业(二)凸轮机构设计(题号:4-A)(一)题目及原始数据···············(二)推杆运动规律及凸轮廓线方程·········(三)程序框图·········(四)计算程序·················(五)程序计算结果及分析·············(六)凸轮机构图·················(七)心得体会··················(八)参考书···················一题目及原始数据试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计(1)推程运动规律为五次多项式运动规律,回程运动规律为余弦加速度运动规律;(2)打印出原始数据;(3)打印出理论轮廓和实际轮廓的坐标值;(4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角;(5)打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角;(6)打印最后所确定的凸轮的基圆半径。
表一偏置直动滚子推杆盘形凸轮机构的已知参数题号初选的基圆半径R0/mm 偏距E/mm滚子半径Rr/mm推杆行程h/mm许用压力角许用最小曲率半径[ρamin][α1] [α2]4-A 15 5 10 28 30°70˚0.3Rr计算点数:N=90q1=60; 近休止角δ1q2=180; 推程运动角δ2q3=90; 远休止角δ3q4=90; 回程运动角δ4二推杆运动规律及凸轮廓线方程推杆运动规律:(1)近休阶段:0o≤δ<60 os=0;ds/dδ=0;2/δd2d=0;s(2)推程阶段:60o≤δ<180 o五次多项式运动规律:Q1=Q-60;s=10*h*Q1*Q1*Q1/(q2*q2*q2)-15*h*Q1*Q1*Q1*Q1/(q2*q2*q2*q2)+6*h*Q1*Q1*Q 1*Q1*Q1/(q2*q2*q2*q2*q2);ds/dδ=30*h*Q1*Q1*QQ/(q2*q2*q2)-60*h*Q1*Q1*Q1*QQ/(q2*q2*q2*q2)+30*h*Q1*Q1*Q 1*Q1*QQ/(q2*q2*q2*q2*q2);2/δd2d=60*h*Q1*QQ*QQ/(q2*q2*q2)-180*h*Q1*Q1*QQ*QQ/((q2*q2*q2*q2))+1 s20*h*Q1*Q1*Q1*QQ*QQ/((q2*q2*q2*q2*q2));(3)远休阶段:180o≤δ<270 os=h=24;ds/dδ=0;2/δd2d=0;s(4)回程阶段:270≤δ<360Q2=Q-270;s=h*(1+cos(2*Q2/QQ))/2;ds/dδ=-h*sin(2*Q2/QQ);2/δd2d=-2*h*cos(2*Q2/QQ);s凸轮廓线方程:(1)理论廓线方程:s0=sqrt(r02-e2)x=(s0+s)sinδ+ecosδy=(s0+s)cosδ-esinδ(2)实际廓线方程先求x,y的一、二阶导数dx=(ds/dδ-e)*sin(δ)+(s0+s)*cos(δ);dy=(ds/dδ-e)*cos(δ)-(s0+s)*sin(δ);dxx=dss*sin(δ)+(ds/dδ-e)*cos(δ)+ds/dδ*cos(δ)-(s0+s)*sin(δ); dyy=dss*cos(δ)-(ds/dδ-e)*sin(δ)-ds/dδ*sin(δ)-(s0+s)*cos(δ); x1=x-rr*coso;y1=y-rr*sino;再求sinθ,cosθsinθ=x’/sqrt((x’)2+(y’)2)cosθ=-y’/sqrt((x’)2+(y’)2)最后求实际廓线方程x1=x-rr*cosθ;y1=y-rr*sinθ;三程序框图四 计算程序1. #include<stdio.h>#include<math.h> |α|>[α1]开始 读入:r 0,Δr 0,r t ,h 或(φ),e 或(l AB 、l OA ) δ,δ,δ,δ,[α],[α], [ρ],N 计算:s 0 I =1 计算:s ,x ,y ,ds/dδ,dx/dδ,dy/dδ,x′,计算:α r 0=r 0= 是回程? |α|>[α2]? 选出α1max 及相应的凸轮转选出α2max 及相应的凸轮转计算:ρ ρ<0? |ρ|-r t ≥[ρamin ]计算ρa 选出|ρamin |及相应的凸轮转角I =I +1 I ≤N ?打印:x ,y ,x′,y′,ρamin ,δamin ,α1max ,δ1max ,α2max ,δ2max , r 0,δ, svoid main(){doubler0,or,rr,h,e,q1,q2,q3,q4,a,a11,a22,Q,pi,pa,paa,QQ,A1,A2,B1,B2,C1,C2; /*定义变量*/double xz[90],yz[90],sz[90],x1z[90],y1z[90],Q1,Q2;double s0,s,x,y,y1,x1,dx,dxx,dy,dyy,ds,dss,sino,coso,p;int N,i,j;r0=19;e=5;h=28;rr=10;q1=60;q2=120;q3=90;q4=90;a11=30;a22=70;or=1;pi=3.141592653;pa=3; /*给已知量赋值*/N=90;A1=0;B1=0;C1=1000;for(; ;){Q=0;C1=1000;QQ=180/pi;r0=r0+or;s0=sqrt(r0*r0-e*e);for(i=1,j=0;i<=N;i++,j++){if(Q<60){ /*近休阶段*/s=0;ds=0;dss=0;a=atan(e/sqrt(r0*r0-e*e)); /*求压力角*/if(a>a11/QQ){break;}else{if(a>A1)A1=a;A2=Q;}}else if(Q>=60&&Q<180){ /*五次多项式运动*/Q1=Q-60;s=10*h*Q1*Q1*Q1/(q2*q2*q2)-15*h*Q1*Q1*Q1*Q1/(q2*q2*q2*q2)+6*h*Q1*Q1*Q 1*Q1*Q1/(q2*q2*q2*q2*q2);ds=30*h*Q1*Q1*QQ/(q2*q2*q2)-60*h*Q1*Q1*Q1*QQ/(q2*q2*q2*q2)+30*h*Q1*Q1 *Q1*Q1*QQ/(q2*q2*q2*q2*q2);dss=60*h*Q1*QQ*QQ/(q2*q2*q2)-180*h*Q1*Q1*QQ*QQ/((q2*q2*q2*q2))+120*h* Q1*Q1*Q1*QQ*QQ/((q2*q2*q2*q2*q2));a=atan(fabs(ds-e)/(sqrt(r0*r0-e*e)+s));if(a>a11/QQ){break;}else{ /*远休阶段*/if(a>A1)A1=a;A2=Q;}}else if(Q>=180&&Q<270){s=28;ds=0;dss=0;a=atan(fabs(ds-e)/(sqrt(r0*r0-e*e)+s));if(a>a22/QQ){break;}else{if(a>B1)B1=a;B2=Q;}}else if(Q>=270&&Q<360){ /*余弦加速度运动*/Q2=Q-270;s=h*(1+cos(2*Q2/QQ))/2;ds=-h*sin(2*Q2/QQ);dss=-2*h*cos(2*Q2/QQ);a=atan(fabs(ds-e)/(sqrt(r0*r0-e*e)+s));if(a>a22/QQ){break;}else{if(a>B1)B1=a;B2=Q;}}dx=(ds-e)*sin(Q/QQ)+(s0+s)*cos(Q/QQ);dy=(ds-e)*cos(Q/QQ)-(s0+s)*sin(Q/QQ);dxx=dss*sin(Q/QQ)+(ds-e)*cos(Q/QQ)+ds*cos(Q/QQ)-(s0+s)*sin(Q/QQ); dyy=dss*cos(Q/QQ)-(ds-e)*sin(Q/QQ)-ds*sin(Q/QQ)-(s0+s)*cos(Q/QQ);sino=dx/(sqrt(dx*dx+dy*dy));coso=-dy/(sqrt(dx*dx+dy*dy));x=(s0+s)*sin(Q/QQ)+e*cos(Q/QQ);y=(s0+s)*cos(Q/QQ)-e*sin(Q/QQ);x1=x-rr*coso;y1=y-rr*sino;sz[j]=s;yz[j]=y;xz[j]=x;x1z[j]=x1;y1z[j]=y1;p=pow(dx*dx+dy*dy,1.5)/(dx*dyy-dy*dxx); /*求理论轮廓曲率半径*/if(p<0){paa=(fabs(p)-rr);if(paa<pa){break;}else{if(paa<C1)C1=paa;C2=Q;}}Q=Q+4;}if(i==91){break;}}for(j=0;j<90;j++){printf("第%d组数据 ",j+1); /*输出数据*/ printf("s=%f ",sz[j]);printf("x=%f,y=%f;",xz[j],yz[j]);printf("x1=%f,y1=%f\n",x1z[j],y1z[j]);}printf("r0=%f\n",r0);printf("推程最大压力角(弧度)=%f,相应凸轮转角=%f\n",A1,A2-4);printf("回程最大压力角(弧度)=%f,相应凸轮转角=%f\n",B1,B2-4);printf("最小曲率半径=%f,相应凸轮转角=%f\n",C1,C2-4);}2.matalab绘图x=[5.000000 6.625241 8.218205 9.771130 11.276451 12.726835 14.115215 15.434827 16.679242 17.842397 18.918626 19.902685 20.789781 21.575590 22.256286 22.828551 23.298459 23.706615 24.097554 24.507799 24.963745 25.480318 26.060379 26.694836 27.363383 28.035800 28.673715 29.232729 29.664801 29.920768 29.952907 29.717406 29.176650 28.301221 27.071507 25.478865 23.526246 21.228245 18.610551 15.708757 12.566564 9.233376 5.761349 2.201948 -1.397906 -5.000000 -8.578422 -12.115052 -15.592657 -18.994297 -22.303399 -25.503841 -28.580030 -31.516981 -34.300384-36.916679 -39.353120 -41.597836 -43.639892 -45.469338 -47.077263-48.455831 -49.598328 -50.499187 -51.154019 -51.559634 -51.714055-51.616530 -51.233453 -50.364513 -48.991675 -47.144744 -44.866118-42.209132 -39.235944 -36.015085 -32.618764 -29.120045 -25.590019-22.095099 -18.694544 -15.438322 -12.365412 -9.502600 -6.863834-4.450154 -2.250205 -0.241303 1.608997 3.340895 5.000000];y=[23.473389 23.067427 22.549082 21.920881 21.185883 20.347670 19.410325 18.378415 17.256967 16.051445 14.767721 13.412051 11.991039 10.511608 8.980965 7.406568 5.800408 4.185421 2.572459 0.957412 -0.675351-2.349452 -4.092999 -5.935252 -7.903549 -10.020601 -12.302228 -14.755601 -17.378031 -20.156343 -23.066822 -26.075733 -29.140389 -32.210697-35.231149 -38.143149 -40.887607 -43.407693 -45.651627 -47.575413-49.145373 -50.340385 -51.153688 -51.594160 -51.686950 -51.473389-50.999220 -50.276588 -49.309014 -48.101211 -46.659063 -44.989598-43.100947 -41.002313 -38.703920 -36.216966 -33.553566 -30.726696-27.750129 -24.638366 -21.406568 -18.070478 -14.646352 -11.150869-7.601061 -4.014222 -0.407825 3.200559 6.792159 10.321065 13.715687 16.907573 19.835197 22.446270 24.699658 26.566822 28.032724 29.096164 29.769520 30.077928 30.057908 29.755535 29.224195 28.522064 27.709391 26.845720 25.987174 25.183912 24.477872 23.900907 23.473389];x1=[2.916667 3.864724 4.793953 5.699826 6.577930 7.423987 8.233875 9.003649 9.729558 10.408065 11.035865 11.609900 12.127372 12.585761 12.982834 13.316655 13.637197 13.989954 14.385216 14.841722 15.369724 15.961917 16.595549 17.241474 17.871626 18.461055 18.986391 19.423879 19.748587 19.934923 19.958013 19.795395 19.428612 18.844393 18.035244 16.999369 15.739987 14.264216 12.581802 10.703984 8.642680 6.409975 4.017612 1.476005 -1.207747 -4.033175 -6.919656 -9.772424 -12.577583 -15.321465 -17.990702 -20.572290 -23.053652 -25.422699 -27.667890-29.778285 -31.743603 -33.554270 -35.201463 -36.677159 -37.974167-39.086169 -40.007747 -40.734411 -41.262621 -41.589804 -41.714366-41.635699 -41.376364 -40.850805 -40.008452 -38.855049 -37.403903-35.676949 -33.704972 -31.526827 -29.187728 -26.736824 -24.224319-21.698402 -19.202199 -16.770908 -14.429195 -12.188866 -10.046784-7.982989 -5.959305 -3.919615 -1.795463 0.475989 2.916667];y1=[13.692810 13.455999 13.153631 12.787181 12.358432 11.86947411.322689 10.720742 10.066564 9.363343 8.614504 7.823697 6.9947736.131771 5.238896 4.320498 3.219708 1.821843 0.191177 -1.605194-3.495769 -5.415401 -7.320538 -9.196225 -11.051016 -12.905780 -14.783306 -16.701480 -18.669812 -20.688233 -22.747295 -24.829259 -26.909752-28.959788 -30.947932 -32.842380 -34.612723 -36.231183 -37.673270-38.917916 -39.947376 -40.747241 -41.306893 -41.620545 -41.688758-41.520236 -41.137755 -40.554855 -39.774375 -38.800119 -37.636833-36.290183 -34.766732 -33.073900 -31.219936 -29.213872 -27.065480-24.785228 -22.384225 -19.874168 -17.267286 -14.576280 -11.814260-8.994681 -6.131282 -3.238012 -0.328966 2.581683 5.107582 7.2405829.322318 11.314634 13.178220 14.874574 16.368490 17.630629 18.63974919.384302 19.863216 20.085799 20.070803 19.844722 19.439472 18.88962018.229473 17.490557 16.700486 15.884986 15.075231 14.320076 13.692810];plot(x1,y1,x,y,'r'):五程序计算结果及分析基圆半径r0=24.000000推程最大压力角(弧度)=0.513512,相应凸轮转角=172.000000回程最大压力角(弧度)=0.766377,相应凸轮转角=352.000000最小曲率半径=14.000000,相应凸轮转角=340.000000序号δS X Y X1 Y11 0 0.000000 5.00000023.473389 2.91666713.6928102 40.000000 6.62524123.067427 3.86472413.4559993 80.0000008.21820522.549082 4.79395313.1536314 120.0000009.77113021.920881 5.69982612.7871815 160.00000011.27645121.185883 6.57793012.3584326 200.00000012.72683520.3476707.42398711.8694747 240.00000014.11521519.4103258.23387511.3226898 280.00000015.43482718.3784159.00364910.7207429 320.00000016.67924217.2569679.72955810.06656410 360.00000017.84239716.05144510.4080659.36334311 40 0.00000018.91862614.76772111.0358658.61450412 440.00000019.90268513.41205111.6099007.82369713 480.00000020.78978111.99103912.127372 6.99477314 520.00000021.57559010.51160812.585761 6.13177115 560.00000022.2562868.98096512.982834 5.23889616 600.00000022.8285517.40656813.316655 4.32049817 640.00985923.298459 5.80040813.637197 3.21970818 680.074888 23.706615 4.18542113.989954 1.82184319 720.239680 24.097554 2.57245914.3852160.19117720 760.53804224.5077990.95741214.841722-1.60519421 800.99382724.963745-0.67535115.369724-3.49576922 84 1.62176025.480318-2.34945215.961917-5.41540123 88 2.428271 26.060379-4.09299916.595549-7.32053824 92 3.412322 26.694836-5.93525217.241474-9.19622525 96 4.566240 27.363383-7.90354917.871626-11.05101626 100 5.87654328.035800-10.02060118.461055-12.90578027 1047.32477228.673715-12.30222818.986391-14.78330628 1088.88832029.232729-14.75560119.423879-16.70148029 11210.54126029.664801-17.37803119.748587-18.66981230 11612.25517829.920768-20.15634319.934923-20.68863331 12014.00000029.952907-23.06682219.958013-22.74729532 12415.744822 29.717406-26.07573319.795395-24.82925933 12817.45874029.176650-29.14038919.428612-26.90975234 13219.11168028.301221-32.21069718.844393-28.95978835 13620.67522827.071507-35.231149 18.035244-30.94793236 14022.12345725.478865-38.143149 16.999369-32.84238037 14423.43376023.526246-40.88760715.739987-34.61272338 148 24.58767821.228245-43.40769314.264216-36.23118339 152 25.57172918.610551-45.65162712.581802-37.67327040 156 26.378240 15.708757-47.57541310.703984-38.91791641 160 27.00617312.566564-49.1453738.642680-39.94737642 164 27.4619589.233376-50.340385 6.409975-40.74724143 168 27.760320 5.761349-51.153688 4.017612-41.30689344 172 27.925112 2.201948-51.594160 1.476005-41.62054545 176 27.990141-1.397906-51.686950-1.207747-41.68875846 180 28.000000-5.000000-51.473389-4.033175-41.52023647 184 28.000000-8.578422-50.999220-6.919656-41.13775548 188 28.000000-12.115052-50.276588-9.772424-40.55485549 192 28.000000-15.592657-49.309014-12.577583-39.77437550 196 28.000000-18.994297-48.101211-15.321465-38.80011951 200 28.000000-22.303399-46.659063-17.990702-37.63683352 204 28.000000-25.503841-44.989598-20.572290-36.29018353 208 28.000000-28.580030-43.100947 -23.053652-34.76673254 212 28.000000-31.516981-41.002313-25.422699-33.07390055 216 28.000000-34.300384-38.703920-27.667890-31.21993656 220 28.000000-36.916679-36.216966-29.778285-29.21387257 224 28.000000-39.353120-33.553566-31.743603-27.06548058 228 28.000000-41.597836-30.726696 -33.554270-24.78522859 232 28.000000-43.639892-27.750129-35.201463-22.38422560 236 28.000000-45.469338-24.638366-36.677159-19.87416861 240 28.000000-47.077263-21.406568-37.974167-17.26728662 244 28.000000-48.455831-18.070478-39.086169-14.57628063 248 28.000000-49.598328-14.646352-40.007747-11.81426064 252 28.000000-50.499187-11.150869-40.734411-8.99468165 256 28.000000-51.154019-7.601061-41.262621-6.13128266 260 28.000000-51.559634-4.014222-41.589804 -3.23801267 264 28.000000-51.714055-0.407825-41.714366-0.32896668 268 28.000000-51.616530 3.200559-41.635699 2.58168369 272 27.965897-51.233453 6.792159-41.376364 5.10758270 276 27.694066-50.36451310.321065-40.8508057.24058271 280 27.155697-48.991675 13.715687-40.0084529.32231872 284 26.361266-47.14474416.907573-38.85504911.31463473 288 25.326238-44.86611819.835197-37.40390313.17822074 292 24.070757-42.20913222.446270-35.67694914.87457475 296 22.619261 -39.23594424.699658-33.70497216.36849076 300 21.000000-36.01508526.566822-31.52682717.63062977 304 19.244492-32.61876428.032724-29.18772818.63974978 308 17.386907-29.12004529.096164-26.73682419.38430279 312 15.463398-25.59001929.769520-24.22431919.86321680 316 13.511407-22.09509930.077928-21.698402 20.08579981 320 11.568926-18.69454430.057908-19.20219920.07080382 324 9.673762-15.43832229.755535-16.770908 19.84472283 328 7.862804-12.36541229.224195-14.42919519.43947284 332 6.171299-9.50260028.522064-12.18886618.8896285 336 4.632172-6.86383427.709391-10.04678418.2294786 340 3.275378-4.45015426.845720-7.98298917.49055787 344 2.127327-2.25020525.987174-5.95930516.70048688 348 1.210364 -0.24130325.183912-3.91961515.88498689 352 0.542336 1.60899724.477872-1.79546315.07523190 356 0.136247 3.34089523.9009070.47598914.320076运行结果截图:六凸轮机构图(廓线)七心得体会通过对凸轮机构的编程设计:(1)熟悉了推杆的运动规律特别是余弦加速度运动规律和五次多项式运动规律;(2)掌握了已知推杆运动规律用解析法对凸轮轮廓曲线的进行设计的方法以及设计时应该注意的各个性能要求;(3)加深了C语言的熟悉与应用。