Indradrive常见故障及处理方法
INDRA二次雷达编码器故障案例分析
INDRA二次雷达编码器故障案例分析作者:刘军来源:《电脑知识与技术》2018年第04期摘要:目前全国投产的INDRA雷达有30多套,其中湛江空管站INDRA雷达于2013年10月30日投入使用,湛江INDRA雷达除了作为航路雷达外还对湛江机场低空进行了覆盖,对空中管制提供有效的保障。
而该设备从2017年3月份以来,编码器频繁出现故障,对运行保障造成压力,该文就最近INDRA雷达编码器频繁出现故障进行排查分析,且就更换编码器的步骤进行详细说明。
关键词:INDRA雷达;编码器;频繁故障中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2018)04-0210-021 概述INDRA S模式单脉冲二次雷达为西班牙INDRA公司设计生产的具有S模式功能的单脉冲二次雷达,双通道配置,全固态设计。
单脉冲测角引入一个用于接收的差通道,通过比较和、差通道信号,得到和差比(SDR),通过此值可得到对应的角度OBA(off boresightAngle)信息。
天线视轴角度加上OBA值就可得出目标与正北间的方位角度,理论上一个应答脉冲就可以得出目标方位。
录取器根据编码器给出的ACP、ARP脉冲及ARP延时得出天线视轴角,编码器的好坏直接影响雷达的测角。
INDRA雷达天线系统有2个编码器,每个编码器的信号均送至两个通道,编码器信号源可选择Automatic,1#编码器的信号1A或1B,2#编码器的信号2A或2B。
平时默认选择Automatic,录取器将自动选择性能较好的编码器信号。
2 编码器的原理和结构航管INDRA雷达编码器属于增量式光电编码器,其结构如图1所示。
编码器由光源、码盘、检测光栅、光电检测器件、转换电路等组成。
码盘由透光材料制成,上面有很多不透光的黑色刻线,编码器工作时码盘随着天线转动,光源在码盘的一端发生光信号,光电检测器件在码盘另外一端通过检测光信号的通断产生两个相差90°的ACP信号,如图1的A相、B相,利用A相和B相的相位关系可以判断编码器正转与反转(当A相超前B相90度认为正转,B相超前A相90度认为反转),Z相产生的脉冲为基准脉冲,它是码盘转一周在固定位置上产生的一个脉冲,又称ARP脉冲。
PPC控制器主要故障代码及排除方法
PPC控制器主要故障代码及排除方法目前市面上的无轴传动印刷机(如高宝、高斯、桑拿、宝南等品牌的印刷机)的控制和传动系统基本上采用的是德国博世力士乐(Bosch Rexroth)公司的SYNAX200系统,该系统由硬件PPC控制器和IndraDrive驱动器组成,前者是这套系统的核心部件,控制着几十个电机的同步运转,后者是这套系统的传动部分,主要由电源、伺服驱动器、伺服电机等组成,接收来自PPC控制器的指令,按要求同步运转。
PPC 控制器和IndraDrive驱动器之间采用Sercos II通讯方式,物理介质是光纤。
如果印刷单元在2个塔以下,通常配置1个PPC控制器,4个塔一般配置2个PPC控制器,PPC控制器之间也同样采用Sercos II通讯方式,不过是交叉通讯方式(硬件是博世力士乐DAQ光缆通讯卡)。
印刷机厂家自己开发的印刷工艺软件系统,加上博世力士乐PPC控制器之间的通讯,就构成了一套完整的无轴印刷机驱动系统。
各个印刷机厂家和力士乐PPC控制器之间的通讯方式是多种多样的,有RS232、Ethernet、Profibus、Arcnet等。
这里,笔者将结合我公司高斯印刷设备的使用情况,介绍印刷过程中遇到的各种博世力士乐PPC控制器的常见故障报警情况以及解决方法。
PPC控制器如图1所示,在PPC控制器的左上方有7段数码状态显示窗,正常情况下,其会显示bb,而当驱动系统出现故障时,PPC数码状态显示窗就会提示报错代码。
PPC控制器的硬件故障代码并不多,大部分故障是参数设置问题,也就是我们常说的“软故障”,软故障一般只是在调试的时候出现,对于厂家交付客户调试好的设备来说,一般是不会遇到的。
代码-01到-2X,显示PPC控制器上电后的一些状态过程,处理时间很快,用户通常看不到。
若PPC控制器上电后,代码停顿在某一个状态,不往下运行,如停留在-08,则很可能是由于PPC控制器主板上的CPU坏了。
代码P0、P1、P2、P3、bb多是PPC正常的通讯状态,停在任何一个状态都是正常现象,大部分是由外部的指令或者是外部的某些故障引起PPC状态的自动切换。
德立达——智能停车场系统常见故障以及排除方法
德立达——智能停车场系统常见故障以及排除方法智能停车场系统的应用不仅给我们的生活带来了很多方便,而且也使我们得到了安全保证。
在智能化时代的脚步前进下,智能停车场系统的市场需求日益剧增,其作用效果明显。
但目前由于技术的问题,智能停车场有时会出现一些故障现象,那么,这时候要如何解决?小德为大家整理了智能停车场系统常见故障及排除方法,供大家参考。
智能停车场系统常见故障现象一:将卡片靠近读卡机,蜂鸣器鸣叫,中文显示屏没有反应,在软件监控界面中看不到读到的卡号(读卡机跟电脑通讯异常)。
可能原因:①控制器与电脑之间的连线不正确;②软件中所设串口跟实际使用串口不相符。
智能停车场系统常见故障现象二:将卡片靠近读卡机,可以听到“嘀嘀”的叫声,但不能开启道闸,中文显示屏显示“无效卡”。
可能原因:①所持卡为无效卡(没有发行、授权的卡);②道闸与读卡机之间的起闸控制线联接不正确或没有联接。
③读卡机已处于电脑控制状态(控制开关已经短接),停车场监控没打开。
智能停车场系统常见故障现象三:车过不下闸。
可能原因:①地感线圈埋设不正确或线圈损坏、折断;②车辆检测器电源功率不足(Max250mA)或感应灵敏度调节不当(过高或太低);③地感检测器的“COM”端与道闸控制器的“GND”公共地端断开或接触不良。
智能停车场系统常见故障现象四:点击监控界面中〖开闸〗按钮,道闸不开启,但用手动按钮可以开闸。
可能原因:①读卡机内“控制开关”没有短接(出厂时均为断开的,处于脱机工作状态,与电脑联网控制时,须短接处于联机状态);②电脑与读卡机不能正常通讯,控制器接收不到开闸命令。
(检查电脑串口的联接是否正常,参数设置是否正确)智能停车场系统常见故障现象五:带图像对比功能,但进入停车场监控界面看不到像。
可能原因:①视频卡安装不正确(如驱动程序安装不正确);②摄像机没有上电或摄像机与视频卡的联线不正确;③停车场软件参数设置不正确(如出入口先择了不摄像)。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
Indradrive常见故障及处理方法

1 Indradrive 与 Ecodrive的一些显著区别 2 Indradrive 常见故障及处理技巧
功率部分和控制部分
DKC驱动器是一种经济型、高集成化的驱动模块,功率部分和控 制部分集成在一块主板上
Indradrive驱动器的功率部分和控制部分是独立的,可以独立替换 和维修
Electric Drives and Controls
Firmware
DKC的Firmware是外置式的金属模块,可以通过更换硬件来改变Firmware
Indradrive的Firmware是内置式的存储单元存在于驱动器内部,通过软件改变Firmware
Electric Drives and Controls DCCN/SVC22; Teddy Ying
3
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
驱动器地址的设置
vorundnachname功率部分和控制部分dkc驱动器是一种经济型高集成化的驱动模块功率部分和控制部分集成在一块主板上indradrive驱动器的功率部分和控制部分是独立的可以独立替换和维修firmwaredkc的firmware是外置式的金属模块可以通过更换硬件来改变firmware驱动器地址的设置dkc驱动器的地址是通过固化软件上的旋钮开关来选择的indradrive是通过p04025参数来选择的1可通过上位控制器修改p04025参数2可通过面板的21command来实现sercos通讯波特率dkc驱动器的sercos波特率默认是2m可以通过光缆通讯卡上的开关来选择的indradrive可以通过p04087参数来设定默认是4m并且当indradrive与sercos主站相连后其波特率是自动扫描出的可以与mlc同步digitalandanalogiosdkc驱动器的输入输出端口配置是固定不可配的digitalandanalogiosindradrive驱动器的输入输出端口配置是可配的通过indraworks软件组态软件dkc的组态软件是drivetopindradrive的组态软件是indraworks2indradrive常见故障及处理方法显示的优先权warningindradrive错误的分类indradrive常见故障及处理方法f8060过流报警驱动器内部电流超出最大的允许电流对策
INDRAS模式二次雷达变频器接地告警故障实例分析

INDRA S模式二次雷达变频器接地告警故障实例分析摘要:目的:对INDRA二次雷达变频器出现“接地告警”故障排查有较好的参考借鉴作用。
方法:通过测试雷达天馈系统避雷器指标、PCB中避雷器指标、马达电缆绝缘、马达三相绝缘测试等一系列方式进行故障排查。
结果:有效的解决了INDRA二次雷达变频器“接地告警”故障。
结论:以上方法为雷达变频器出现“接地告警”提供了解决思路,有较强实际运用效果。
关键词:INDRA雷达;变频器;接地告警;解决思路0 引言铜仁INDRA二次雷达于2022年7月14日出现双变频器“接地告警”故障。
表现为:INDRA二次雷达天线停转,信号中断。
通过测试雷达天馈系统避雷器指标、天线控制箱中避雷器指标、马达电缆绝缘、马达三相绝缘测试等方式进行故障排查,故障于8月30日排除,现运行正常。
1 故障概述铜仁INDRA二次雷达天馈系统共使用两个施耐德Altivar 71变频器,两个变频器互为热备份。
变频器在运行过程中常会出现过压、欠压、过流、接地等故障,这些故障的发生严重影响了雷达正常运行。
2故障检测及处理2.1 天馈系统避雷器检测铜仁二次雷达天馈系统共有两组3P电源避雷器、三组2P电源避雷器、两组电源避雷器以上避雷器均为德国原装盾牌公司生产。
① 测试依据:遵循国际电工委员会(IEC)建议的一般情况下应达到1MΩ的最低限度的要求”;GB-T 21431 建筑物防雷装置检测技术规范》“5.8.5 电源SPD的测试”避雷器压敏电压和漏电流指标。
② 测试结果:1号马达电源避雷器内阻: L1:0.21mΩ;L2:0.25mΩ;L3:0.33mΩ;2号马达电源避雷器内阻:L1:0.23mΩ;L2:0.24mΩ;L3:0.21mΩ;④ 测试结论:根据兄弟单位类似故障报告中提示:避雷器电阻应不低于1MΩ(报告原文第五页“4 测试评估依据(2)对于一般电气设施绝缘程度的标准,遵循国际电工委员会(IEC)建议的一般情况下应达到1MΩ的最低限度的要求”),测试数据均低于1MΩ,认为天馈系统避雷器性能下降是导致变频器出现“接地告警”的主要原因。
Indradrive常见故障及处理方法

设备应用场景
工业自动化
IndrDrive设备广泛应用于工业自动化 领域,如生产线上的物料搬运、装配、 检测等环节,提高生产效率和产品质 量。
物流运输
服务行业
IndrDrive设备在服务行业也有广泛应 用,如餐厅送餐、酒店客房服务、机 场行李搬运等场景,提高服务质量和 客户满意度。
IndrDrive设备在物流运输领域可用于 自动化分拣、装卸、运输等环节,降 低人工成本,提高物流效率。
定期对驱动器进行维 护和保养,确保其正 常运转。
设备保养建议
根据实际情况,制定合理的保养 计划,对驱动器进行全面检查和
维护。
对于长时间未使用的驱动器,应 定期通电检查,确保其正常工作。
对于出现故障的驱动器,应及时 进行处理和修复,避免影响生产
和生活。
THANKS
感谢观看
停机故障
总结词
停机故障表现为驱动器在运行过程中 突然停机,无法再次启动。
详细描述
这类故障可能是由于过热、过流、欠 压等保护机制触发所导致。
03
indrdrive故障处理方法
启动故障处理
总结词
检查电源连接、控制器 设置和电机状态
检查电源连接
确保电源插头和插座接 触良好,没有损坏或松
动。
检查控制器设置
定期检查驱检查连接线路是 否松动或破损。
定期清理驱动器表面灰尘和杂 物,保持清洁。
定期检查驱动器的散热风扇是 否正常工作,确保散热良好。
故障预防措施
严格按照驱动器的使 用说明书进行操作, 避免超载或过载。
在使用过程中,注意 避免突然断电或电压 波动,以免对驱动器 造成损坏。
检查控制器参数设置, 确保与驱动器匹配。
常见的伺服驱动器故障及处理方法

常见的伺服驱动器故障及处理方法伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
以下为伺服驱动器维修的几种方法。
1、LED灯是绿的,但是电机不动(1) 故障原因:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT 和–INHIBIT 端口。
(2) 故障原因:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
2、上电后,驱动器的LED灯不亮故障原因:供电电压太低,小于最小电压值要求。
处理方法:检查并提高供电电压。
3、当电机转动时, LED灯闪烁(1) 故障原因:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
(2) 故障原因:HALL传感器故障。
处理方法:当电机转动时检测Hall A, Hall B, Hall C的电压。
电压值应该在5VDC和0之间。
4、LED灯始终保持红色故障原因:存在故障。
处理方法:原因: 过压、欠压、短路、过热、驱动器禁止、HALL无效。
5、电机失速(1) 故障原因:速度反馈的极性搞错。
处理方法:a、如果可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b、如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c、如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d、如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
(2) 故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能提供足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
6、电机在一个方向上比另一个方向跑得快(1) 故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
浅谈INDRAS模式雷达常见故障处理
浅谈INDRA S模式雷达常见故障处理摘要:近年来,随着全球飞行流量的快速增长,常规二次雷达(简称为SSR)所使用的传统A/C模式询问方式已不能满足空中交通管制工作的需求,而由此在A/C模式基础上研发的S模式二次雷达应运而生。
INDRA IRS 20-MP/L MODE S雷达是民航山西空管分局于2012年10月投产使用的S模式二次雷达。
本文就INDRA S模式二次雷达故障案例作一简要介绍。
关键词:INDRA S模式、故障常规单脉冲二次雷达(Monopulse Secondary Surveillance Radar)可以获得飞机的识别代码、方位距离、气压高度等信息,在飞行流量不大的情况下,完全可以满足空中交通管制工作的需求。
但是,近年来,随着全球空域飞行流量的快速增长,空管自动化系统的快速发展,常规A/C模式雷达缺点日益凸显,S模式二次雷达应运而生。
一、INDRA雷达介绍1、INDRA雷达概述INDRA IRS-20MP/L MODE S二次雷达是西班牙INDRA公司生产的一部S模式单脉冲二次雷达,它由主备双通道的收发机, UTS(supervision and test systerm)系统,天线及伺服系统,SLR(Local management systerm)本地和SRG(Remote management ststerm)遥控工作站、VR3000视频显示系统及GPS时钟系统组成(如图所示)。
INDRA IRS-20MP/L MODE S二次雷达组成框图2、INDRA雷达特点1)询问机INDRA雷达询问机为双通道热备份工作方式,通过SLG可以对和通道及控制通道进行7级功率编程,调整发射功率大小,并可以通过SLG对询问模式和策略进行选择,可以选择S模式询问、常规A/C模式询问、S模式和A/C模式交替询问等询问方式。
2)接收机和录取器INDRA接收机和录取器也为主备双通道热备份工作方式,可以对S模式和SSR模式雷达回答信号进行接收处理以生成航迹报告,并可以对信号进行接收旁瓣抑制,其硬件包括MRU接收机板块、MCPU板、MICA02板、MICA03板共四块组件,结构简单,集成化程度高。
Rexroth IndraDrive Cs ACS01 伺服驱动器 产品手册说明书

Rexroth IndraDrive Cs ACS01伺服驱动器版本03产品手册R912008283Rexroth IndraDrive Cs ACS01伺服驱动器产品手册DOK-INDRV*-ACS01******-PR03-ZH-PRS-6d0559b3a9217a2a0a347e8600d30991-3-zh-CN-7●Rexroth IndraDrive Cs 系统概述●Rexroth IndraDrive Cs 系统组件组合方式说明●Rexroth IndraDrive Cs 系统组件选择●操作规范●系统特性应用说明出版颁发日期备注012020-01第一版022020-04功能新增032020-06参数更新版权© 博世力士乐(西安)电子传动与控制有限公司 2020保留所有权利, 也保留包括任何使用、利用、翻印、编辑、转让以及申请知识产权的权利。
责任规格数据仅用于产品说明,如果未在合同中明确规定,不得视为对特性的保证。
本公司保留关于该文档内容和产品可用性的所有权利。
题目文件类型文件类型代号内部存档附注文件用途更改过程Rexroth IndraDrive Cs ACS01伺服驱动器Rexroth IndraDrive Cs ACS01伺服驱动器 I目录目录页数1 系统介绍 (1)1.1 Rexroth IndraDrive Cs 系列 (1)1.1.1 概述–Rexroth IndraDrive Cs (1)1.1.2 行业应用 (2)1.1.3 特性 (3)1.2 系统配置 (5)1.2.1 系统结构 (5)1.2.2 驱动器组件 (6)2 安全使用说明 (9)2.1 合理使用 (9)2.1.1 使用须知 (9)2.1.2 应用场合 (9)2.2 不当使用 (10)2.3 使用安全说明 (10)2.3.1 安全使用要求 (10)2.3.2 使用不当引发的危险 (10)2.3.3 与电气元件和外壳接触的防护 (10)2.3.4 危险动作的防护 (11)2.3.5 与高温部件接触的防护 (12)2.3.6 电池安全 (12)2.4 警示词和安全提示符号 (13)3 组件组合 (15)3.1 各组件简介 (15)3.1.1 ACS01---简要说明及设计构成 (15)3.2 配置驱动系统 (15)3.2.1 伺服驱动器 (15)3.2.2 设备功能 (16)3.2.3 电机 (16)3.2.4 电机电缆 (21)3.3 安装条件 (21)3.3.1 安装条件与操作环境 (21)3.3.2 控制柜设计结构与散热 (24)3.4 机械项目规划 (25)3.4.1 驱动器 (25)3.5 电气项目规划 (31)3.5.1 连接图 (31)3.5.2 控制电压项目规划 (32)3.5.3 电源连接电源电压 (36)3.5.4 直流母线耦合 (60)3.6 验收测试及认证 (67)R912008283_版本03 Bosch Rexroth AG页数4供货、标签、运输及存放 (69)4.1 供货................................................................................... 694.1.1 出厂测试.............................................................................. 694.1.2 用户测试.............................................................................. 694.2 标签................................................................................... 704.2.1 铭牌.................................................................................. 704.2.2 包装清单.............................................................................. 714.3 组件运输............................................................................... 724.4组件存放 (72)5安装 (73)5.1 控制柜内安装ACS01...................................................................... 735.2 电气连接............................................................................... 745.2.1 连接图................................................................................ 745.2.2 连接点................................................................................ 755.2.3 板载连接点............................................................................ 765.2.4设计与安装过程中的电磁兼容措施 (96)6组件参数 (105)6.1 控制单元.............................................................................. 1056.1.1 EC-多类型编码器接口.................................................................. 1056.1.2 ET-多协议实时以太网网口.............................................................. 1296.1.3 数字量输入/输出...................................................................... 1356.1.4 电压型模拟量输入..................................................................... 1406.1.5 电流型模拟量输入..................................................................... 1416.1.6 模拟量输出........................................................................... 1416.1.7 继电器触点........................................................................... 1426.2 控制面板.............................................................................. 1436.2.1 设计................................................................................. 1436.3 电源.................................................................................. 1446.3.1 控制电压............................................................................. 1446.3.2 电源电压............................................................................. 1456.3.3 直流母线............................................................................. 1496.3.4 集成制动电阻......................................................................... 1516.3.5逆变器 (151)7电缆、配件及附加组件 (155)7.1 概述.................................................................................. 1557.1.1 电缆................................................................................. 1557.1.2 配件................................................................................. 1557.1.3 附加组件............................................................................. 1567.2 配件.................................................................................. 1577.2.1 安装及配件连接(HAS09).............................................................. 1577.2.2 直流母线连接器(RLS0778/K06)........................................................ 1637.2.3RKB0013,以太网通讯 (164)II 目录Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 III目录页数7.3 附加组件 (165)7.3.1 电源滤波器NFD / NFE (165)7.3.2 电源电抗器 (168)7.3.3 HLR外部制动电阻 (172)7.3.4 直流侧电容单元HLC (179)8 环境保护及废弃处置 (183)8.1 环境保护 (183)8.2 废弃处置 (183)9 服务与支持 (185)10 附录 (187)10.1 电缆横截面及保险丝尺寸选型 (187)10.2 测量泄露电容 (194)10.3 电容泄露 (195)10.3.1 电机电容泄露 (195)10.3.2 电力电缆电容泄露 (196)索引 (199)R912008283_版本03 Bosch Rexroth AGIV Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本03Rexroth IndraDrive Cs ACS01伺服驱动器 1/201系统介绍1 系统介绍1.1 Rexroth IndraDrive Cs 系列1.1.1 概述–Rexroth IndraDrive Cs表格1-1:Rexroth IndraDrive Cs 系列组件R912008283_版本03 Bosch Rexroth AG1.1.2行业应用通用自动化、搬运、组装自动化组装及搬运系统码垛系统、取放系统、物流......机床小型机(例如木材加工)、辅机......食品及包装行业灌装及密封、码垛、装箱、封箱、贴标......印刷机械标签打印、贴标、数字印刷、定位......半导体行业半导体/晶圆生产、处理、金属化、清洗、太阳能电池生产......表格1-2:目标应用2/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.1.3 特性功能特性●结构紧凑●防护等级IP20●具有存储和控制功能的操作面板●多类型编码器接口支持多种主流编码器(ACUROlink、HIPERFACE®、EnDat2.1、EnDat2.2、SSI、TTL、 sin/cos 、旋转变压器、MS2N 编码器、MSC编码器 )●直流母线连接●1个模拟量输入 (14位, ±10 V)●8个数字量输入–2个探针输入–1个组合式数字量端口,可配置为数字量输入或输出●可调节的风扇控制●集成制动电流测量和监控●电机输出端绕组短路触发停机保护机制●支持MSC永磁同步伺服电机●霍尔传感器适配盒SHL03.1,用于操作带有数字霍尔传感器的MCL直线电机性能特征规格(宽:50 mm;高:215 mm)规格(宽:70 mm;高:268 mm)规格(宽:130 mm;高:268 mm)ACS1-W00...→0818283654主电源V 3 AC 200 … 500 V最大输出电流(4kHz)A rms818283654表格1-3:ACS01伺服驱动器规格参数Rexroth IndraDrive Cs ACS01伺服驱动器 3/201系统介绍R912008283_版本03 Bosch Rexroth AG接口概述●兼容IndraDrive 平台●支持以下协议的实时以太网通讯:–sercos III –EtherCAT(SoE)–EtherCAT(CoE)–PROFINET IO –EtherNet/IP●多类型编码器接口●模拟量输入●可自由配置的数字量输入/输出可用编码器可用编码器供电电压为5 V 和12 V 的编码器:●MSC 电机编码器●MSK 电机编码器●MS2N 电机编码器●ACUROlink 编码器●1V pp 正弦编码器,HIPERFACE®●1V pp 正弦编码器,EnDat 2.1、EnDat 2.2●1V pp 正弦编码器(配置参考信道)●省线式TTL 编码器●SSI●组合式编码器SSI(SSI 及1V pp 正弦编码器)●旋转变压器●SHL02.1霍尔传感器适配盒●数字霍尔传感器与SHL03.1霍尔传感器适配盒可配合使用4/201系统介绍Rexroth IndraDrive Cs ACS01伺服驱动器Bosch Rexroth AG R912008283_版本031.2系统配置1.2.1系统结构*可选项24V 控制电压COM 通讯DST 自耦变压器F 保险丝ACS01伺服驱动器HLC 直流母线电容单元(用于连接直流母线的设备)HLR 外部制动电阻HNL 电源电抗器NF 电源滤波器K1外部电源接触器M 电机RB内部制动电阻(位于驱动器后方)插图1-1:Rexroth IndraDrive Cs 驱动系统系统介绍系统介绍1.2.2 驱动器组件ACS01 伺服驱动型号系统介绍表格1-4:ACS01型号说明HAP01 键盘图示插图1-2:HAP01 键盘型号表格1-5:HAP01型号说明系统介绍2安全使用说明2.1合理使用2.1.1使用须知Bosch Rexroth 产品代表着先进的开发和制造水平。
德立达——智能停车场系统常见故障以及排除方法
德立达——智能停车场系统常见故障以及排除方法智能停车场系统的应用不仅给我们的生活带来了很多方便,而且也使我们得到了安全保证。
在智能化时代的脚步前进下,智能停车场系统的市场需求日益剧增,其作用效果明显。
但目前由于技术的问题,智能停车场有时会出现一些故障现象,那么,这时候要如何解决?小德为大家整理了智能停车场系统常见故障及排除方法,供大家参考。
智能停车场系统常见故障现象一:将卡片靠近读卡机,蜂鸣器鸣叫,中文显示屏没有反应,在软件监控界面中看不到读到的卡号(读卡机跟电脑通讯异常)。
可能原因:①控制器与电脑之间的连线不正确;②软件中所设串口跟实际使用串口不相符。
智能停车场系统常见故障现象二:将卡片靠近读卡机,可以听到“嘀嘀”的叫声,但不能开启道闸,中文显示屏显示“无效卡”。
可能原因:①所持卡为无效卡(没有发行、授权的卡);②道闸与读卡机之间的起闸控制线联接不正确或没有联接。
③读卡机已处于电脑控制状态(控制开关已经短接),停车场监控没打开。
智能停车场系统常见故障现象三:车过不下闸。
可能原因:①地感线圈埋设不正确或线圈损坏、折断;②车辆检测器电源功率不足(Max250mA)或感应灵敏度调节不当(过高或太低);③地感检测器的“”端与道闸控制器的“GND”公共地端断开或接触不良。
智能停车场系统常见故障现象四:点击监控界面中〖开闸〗按钮,道闸不开启,但用手动按钮可以开闸。
可能原因:①读卡机内“控制开关”没有短接(出厂时均为断开的,处于脱机工作状态,与电脑联网控制时,须短接处于联机状态);②电脑与读卡机不能正常通讯,控制器接收不到开闸命令。
(检查电脑串口的联接是否正常,参数设置是否正确)智能停车场系统常见故障现象五:带图像对比功能,但进入停车场监控界面看不到像。
可能原因:①视频卡安装不正确(如驱动程序安装不正确);②摄像机没有上电或摄像机与视频卡的联线不正确;③停车场软件参数设置不正确(如出入口先择了不摄像)。
智能停车场系统常见故障现象六:中文显示屏不显示。
低速离心机常见故障分析 低速离心机如何操作

低速离心机常见故障分析低速离心机如何操作1、通电源开机后,掌控面板显示正常,降温风扇工作正常,按下启动键时,中心继电器工作,离心机不工作。
依据故障现象分析,电源部分和掌控部分应当正常,故障应当在掌控板到电机的线路、碳刷和电机处。
打开离心机,用万用表测量掌控板到碳刷处线路导通,再测量碳刷到电机转子时不导通,认真察看碳刷与电机转子接触不良,拆下碳刷发觉由于使用时间过长,太短造成。
更换新的碳刷,故障排出。
这种故障为离心机常见故障,要定期更换碳刷,以免发生以上故障。
2、通电源开机后,掌控面板显示正常,降温风扇工作正常,按下启动键时,中心继电器不工作,离心机不工作。
依据故障现象分析,电源部分应当正常,故障应当在掌控板和到电机的线路、碳刷和电机处。
打开离心机,用万用表测量掌控板到碳刷处线路导通,再测量碳刷到电机转子也导通,测量电机线圈正常。
开机后,用万用表测量掌控板到电机的导线无电压输出,可判定故障应在掌控板上,其中中心继电器不工作,故障应在掌控中心继电器的掌控电路上,逐一排出,发觉掌控板上C9013三极管击穿,更坏新的C9013三极管,故障排出。
3、通电源开机后,掌控面板显示正常,按下启动键时,离心机工作正常。
但按停止开关时,离心机无反映,不能停止工作。
依据故障现象分析,故障应当在掌控电路部分中的停止掌控部分,其包括停止开关、电源掌控板及计时器掌控板。
打开离心机,用万用表检测停止开关,为正常;开机后测量电源掌控板输出到计时器掌控板信号为交流16V正常,故障应在计时器掌控板上,计时器掌控板得到停止信号不能执行停止任务。
逐一排出,发觉计时器掌控板上C9013三极管和型号为16V,470F的电容击穿,更坏新的三极管和电容,故障排出。
4、通电源开机后,掌控面板显示正常,按下启动键时,离心机工作正常。
但按停止开关时,离心机不能立刻停止工作,而是旋转好长时间才渐渐停下来。
依据故障现象分析,故障应当在掌控电路部分中的停止制动掌控部分,其制动掌控部分包括型号为:WJ176—12V中心继电器、刹车电阻R:20-30、型号为:KBPC50A10M硅堆和导线。
endurant变速箱故障诊断手册

endurant变速箱故障诊断手册1. 引言1.1 概述本文旨在提供一份完整的endurant变速箱故障诊断手册,以帮助读者更好地理解并解决与该型号变速箱相关的故障。
在现代汽车工业中,变速箱作为重要的动力传递装置之一,扮演着关键角色。
因此,快速准确地诊断和修复变速箱故障对于确保车辆正常运行至关重要。
1.2 文章结构本手册主要包含以下几个部分:引言、正文、变速箱故障诊断手册、结论和参考文献。
在正文部分中将介绍endurant变速箱的基本原理和工作方式,以增强读者对其内部机制的理解。
紧接着,在变速箱故障诊断手册中将详细介绍常见的故障类型分类、故障现象及原因分析,并提供相应的诊断方法和步骤。
1.3 目的本手册的目标是为读者提供一份实用而全面的endurant变速箱故障诊断指南,以支持他们在面对类似问题时能够迅速判断出问题所在,并采取有效措施进行修复。
此外,本手册还旨在加深读者对endurant变速箱的了解,为他们提供更好的保养和维护建议,以延长变速箱的使用寿命并保证行驶安全。
通过本文所提供的内容,读者将能够获得有关endurant变速箱故障诊断方面的详细信息,并掌握相关知识和技能来处理各种可能出现的故障情况。
最终目标是使读者成为一名经验丰富且高效解决变速箱问题的专业人士。
请注意:如需进一步了解相关内容,请仔细阅读正文部分。
2. 正文在汽车行业,变速箱是一种关键的传动装置,其作用是将发动机输出的转矩传递给车辆的驱动轮。
而endurant变速箱是一种应用广泛且可靠性高的变速箱型号。
然而,在长时间的使用过程中,endurant变速箱有可能会出现故障,影响汽车的正常运行。
因此,为了帮助维修人员准确快速地诊断endurant变速箱故障,并排除故障原因,本手册旨在提供详细的故障诊断方法与步骤。
为了使读者更好地理解和掌握故障诊断内容,本手册将按照以下结构进行阐述:首先,在第三章中将对endurant变速箱的故障类型进行分类描述。
INDRA二次雷达典型故障分析与维修

• 194•本文结合INDRA 二次雷达天线控制及驱动系统的实际情况,将维修中遇到的典型故障作详细的分析,并针对INDRA 二次雷达天线马达出现不定时停机的故障进行了简述,以供同行参考。
1 故障现象INDRA 二次雷达天线马达出现不定时停机,停机后天线控制箱PCB 面板上的“drive1 failure ”、“drive2 failure ”故障红色指示灯亮起,“startup warning ”橙色指示灯亮起,雷达天线停止转动(如图1所示)。
本地重启马达,马达无法开启,将PCB 断电重启,马达正常启动,雷达恢复正常。
检查本地监控告警信息为马达停止和开启告警,PCB 中告警信息显示为“电网欠压254.9V ”(如图2所示)。
图1 PCB面板显示 图2 变频器故障显示2 故障分析(1)针对面板显示的“欠压故障”故障,检查UPS 系统历史记录和PCB 供电线路;目的是排除供电欠压故障及PCB 供电线路接触不良问题。
(2)根据PCB 内部24V 供电线路流程得知,天线控制箱PCB 内部24V 直流供电模块故障将会导致PLC 和继电器均无供电,从而导致变频器输入继电器跳开。
由于变频器前端的滤波器中有LC 电路,滤波器中的电压不能突变,变频器输入电压监控模块检测到突变电压而造成“欠压故障”。
(3)可编程控制器PLC 与相应设备连接的CAN 总线接触不良而导致出现欠压故障。
(4)天线控制箱PCB 中的安全继电器控制链路出现故障,马达温度检测系统(PTC )告警,紧急按钮出现漏电而拉低继电器供电电平导致马达关断,天线控制箱PCB 内可编程控制器PLC 出现程序死机或者给出错误的指令(或电平),安全继电器出现故障;从而出现上述故障。
(5)由于变频器输入电压检测灵敏度过高,电网有轻微的跳变而出现“欠压故障”告警,从而关断变频器。
3 故障检修过程(1)检查UPS 供电,查看台站UPS 历史告警信息,未能发现UPS 输出有欠压等故障现象出现。
英格索兰问题及维修Word版
Ingersoll-Rand(英格索兰)空压机操作说明2009-03-19 20:39Ingersoll-Rand(英格索兰)空压机操作说明一、ntellisvs控制器1 EMERGENCY STOP紧急停机开关按此开关便使空压机立即停机。
此开关手动复位后,空压机才能重新启动。
顺时针转动,使紧急停机开关复位,控制器显示屏会亮,指出线路电压和控制电压已具备。
2 START启动如果显示屏显示“Ready To Start”,按下此按钮使空压机启动。
如有足够用气量要求,空压机启动便自动加载。
3 STOP停机按此按钮将激活卸载停机顺序。
如空压机正在加载运行,则先卸载,维持卸载运行10到30秒(可调节),然后停机。
如空压机已在卸载运行,则立即停机。
4 UNLOAD卸载按此按钮将使空压机卸载并维持卸载状态。
显示屏显示机器在“Running Unloaded”(卸载运行)及“Mode:UNLOAD”(模式:卸载)。
5 LOAD加载如空压机已在运行且“Discharge Pressure”(排气压力)小于“Online Pressure”(回跳压力),则按此按钮将使空压机加载。
同时也会使空压机回到由“Mode of Operation”(运行模式)设定点规定的运行模式。
利用其它五个按钮可供操作者选择多种不同功能,令机器进入各种运行状态。
每个按钮的作用由当时的屏幕显示及正在执行的那个功能所决定。
6 ARROWS箭头按钮这些上下箭头按钮具有与显示屏有半相关的多种功能,当屏幕上出现功能表时,箭头按钮用来上下选点表上的项目。
7 DISPLAY BUTTONS 显示按钮显示屏幕下面三个按钮的功能是改变紧接在它们上面的屏幕最下一行的显示字符,并由这些字符定义。
二、CURRENT STATUS 当前状态CURRENT STATUS屏幕是控制器的“正常”显示状态。
CURRENT STATUS参数项Package Discharge Temperature 机组排气温度Airend Discharge Temperature 主机排气温度Injected Temperature 喷油温度Sump Pressure 分离前压力Separator Pressure Drop 油分离器压降Coolant Filter 油过滤器Invet Vacuum 进气负压Inlet Filter 进气过滤器Total Hour 总运行小时Loaded Hour 加载小时%Load Modulation 加载调节百分比Software Title and Version 软件名称及版本如30秒内不按任何按钮,控制器便自动从其它屏幕回到CURRENT STATUS屏幕。
英威腾高压变频器故障处理措施
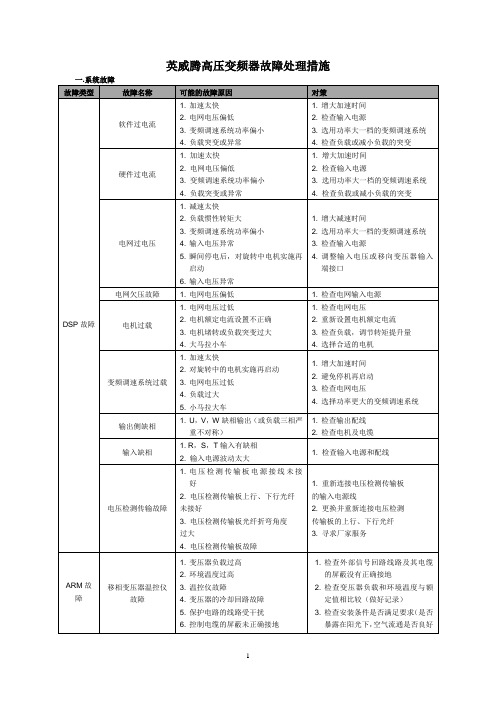
英威腾高压变频器故障处理措施
二.单元故障
三.变频调速系统告警后的动作
1. 系统级告警介绍
2. 单元级告警介绍
其中,发生告警的单元的编号1~36,1~12表示A相单元,13~24表示B相单元,25~36表示C相
单元。
变频调速系统发生告警后,系统会给予提示,不影响系统的正常工作,用户也应当引起注意,否则有些告警长时间存在可能转换成故障,从而导致系统停机。
四. 变频调速系统故障后的动作
GD5000系列高压变频器调速系统在发生故障后,系统会锁存该故障信息,显示故障信息,同时报警器开始报警。
对于系统故障,变频调速系统立即自由停车(封脉冲)。
对于严重的系统故障,比如移相变压器的温度超过了150℃,系统会在自由停机的基础上,切断高压输入。
对于单元故障,可以根据需要选择旁路故障单元降额运行,此时系统不处理单元的故障;或者处理单元的故障,此时会停车,并切断高压电。
如果选择旁路故障单元的方式,最多处理二路单元发生的故障,如果多于二路的单元发生故障,并且发生故障的单元不在旁路位置上,则系统仍然会上报故障,并切断高压电。
为了可以锁存住发生的故障,GD5000系列高压变频器调速系统会一直锁存所发生的故障,直到用户排除所有故障后按下故障复位按钮,才可以恢复正常的状态。
其触摸屏可以锁存最近发生的几百个故障信息以及其对应的环境。
常见的伺服驱动器故障及处理方法
常见的伺服驱动器故障及处理方法伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
以下为伺服驱动器维修的几种方法。
1、LED灯是绿的,但是电机不动(1) 故障原因:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT 和–INHIBIT 端口。
(2) 故障原因:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
2、上电后,驱动器的LED灯不亮故障原因:供电电压太低,小于最小电压值要求。
处理方法:检查并提高供电电压。
3、当电机转动时, LED灯闪烁(1) 故障原因:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
(2) 故障原因:HALL传感器故障。
处理方法:当电机转动时检测Hall A, Hall B, Hall C的电压。
电压值应该在5VDC和0之间。
4、LED灯始终保持红色故障原因:存在故障。
处理方法:原因: 过压、欠压、短路、过热、驱动器禁止、HALL无效。
5、电机失速(1) 故障原因:速度反馈的极性搞错。
处理方法:a、如果可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b、如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c、如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d、如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
(2) 故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能提供足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
6、电机在一个方向上比另一个方向跑得快(1) 故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
曳引机常见故障分析及排除方法
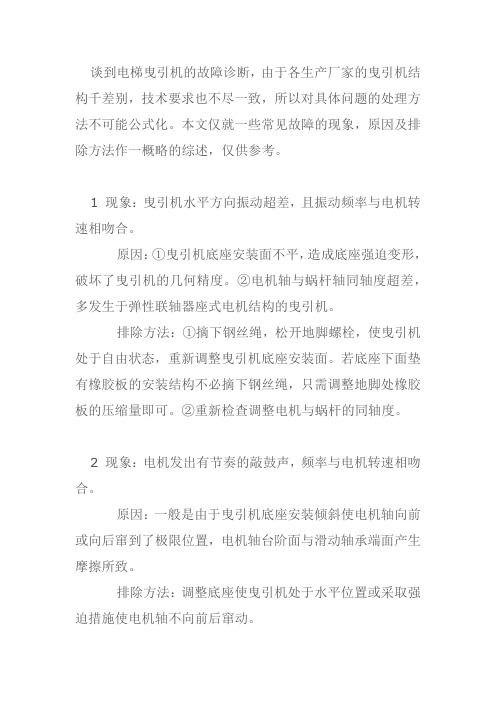
谈到电梯曳引机的故障诊断,由于各生产厂家的曳引机结构千差别,技术要求也不尽一致,所以对具体问题的处理方法不可能公式化。
本文仅就一些常见故障的现象,原因及排除方法作一概略的综述,仅供参考。
1 现象:曳引机水平方向振动超差,且振动频率与电机转速相吻合。
原因:①曳引机底座安装面不平,造成底座强迫变形,破坏了曳引机的几何精度。
②电机轴与蜗杆轴同轴度超差,多发生于弹性联轴器座式电机结构的曳引机。
排除方法:①摘下钢丝绳,松开地脚螺栓,使曳引机处于自由状态,重新调整曳引机底座安装面。
若底座下面垫有橡胶板的安装结构不必摘下钢丝绳,只需调整地脚处橡胶板的压缩量即可。
②重新检查调整电机与蜗杆的同轴度。
2 现象:电机发出有节奏的敲鼓声,频率与电机转速相吻合。
原因:一般是由于曳引机底座安装倾斜使电机轴向前或向后窜到了极限位置,电机轴台阶面与滑动轴承端面产生摩擦所致。
排除方法:调整底座使曳引机处于水平位置或采取强迫措施使电机轴不向前后窜动。
3 现象:曳引机制动器制动时轿厢内有明显的冲击感,即顿一下。
原因:①制动器闸瓦与制动轮的间隙过大,国际规定小于0.7mm。
②蜗杆轴轴向游隙过大。
③蜗轮副啮合侧隙过大,这种情况易发生在已使用多年的曳引机。
排除方法:①调整松闸间隙至标准要求。
②检查蜗杆推力轴承锁紧螺母是否松动,如无松动应减薄垫片,使游隙达到出厂标准要求。
③蜗轮副中心距调整方式有多种如:支架式、斜块式和偏心式,但均可使侧隙调整至出厂要求。
4 现象:整机噪声大,机房噪声超过80dB(A)。
原因:①电机绕组发生故障,产生高频交流声,多发生在低速绕组运行时,有时也发生在高速运行时,属电机制造问题。
②蜗轮副接触斑点位置偏向旋入端或蜗轮齿面光洁度差(易发生在铲刮的齿面)。
③蜗杆轴上推力轴承滚道质量差。
④蜗杆滑动轴承及推力轴承油路阻塞,使轴承润滑不良。
⑤推力轴承的定位端面与蜗杆轴线垂直度差,使轴承滚道偏移。
排除方法:①应由电机专业人员检修。
英特列装置故障指导

Vacuum band filter StUFVacuum band filter StUFIf the fault is not listed, or the fault cannot be found contact theInter lit Joistgen GmbH Service-Department (see Appendix A-2 , Service address and contact)!如果错误没有在以上列出,或者错误无法发现,请联系Interlit 德国服务部门。
(详见附录A-2,服务地址及联系信息)! Troubleshooting pumps 泵的故障处理If faults should occur during operation of the sys- tem, normally a corresponding message is dis- played at the touch panel at the control cabinet. Follow first the notes at the touch panel.如果在系统操作过程中出现错误,通常会有相应的信息显示在控制箱的触摸面板上。
首先遵循触摸面板上的提示。
If not error message is displayed, use the following table to find the fault.如果没有显示错误信息,使用以下的表格找到错误。
In the event of a fault, switch off the system at the range selector.If necessary, switch off the complete system using the master switch.当发生错误时,用该区域电源开关关闭系统。
必要时,用主开关关闭整个系统。
Vacuum band filter StUFFault 错误Cause 原因Correction 修正方法Filter pump / supply pump does not deliver过滤泵/供油泵不工作了Wrong direction of rotation旋转方向错误Spindle set/impellers worn轴/叶轮磨损Level in dirty/clean tank too low, pump sucks air.脏液箱/净液箱的液位太低,泵进空气。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Digital and analog I/Os
DKC驱动器的输入输出端口配置是固定不可配的
.**
6
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
Digital and analog I/Os
Indradrive驱动器的输入输出端口配置是可配的,通过Indraworks软件
.**
7
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
内容
1 Indradrive 与 Ecodrive的一些显著区别 2 Indradrive 常见故障及处理技巧
功率部分和控制部分
DKC驱动器是一种经济型、高集成化的驱动模块,功率部分和控 制部分集成在一块主板上
Indradrive驱动器的功率部分和控制部分是独立的,可以独立替换 和维修
.**
2
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
组态软件
DKC的组态软件是Drivetop
Indradrive的组态软件是Indraworks
.**
8
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
Firmware
DKC的Firmware是外置式的金属模块,可以通过更换硬件来改变Firmware
Indradrive的Firmware是内置式的存储单元存在于驱动器内部,通过软件改变Firmware
.**
3
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
Velocity command to zero Velocity command to zero
更换硬件 如Watchdog,更换源自件.**11© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
2,Indradrive 常见故障及处理方法
.**
9
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
驱动器地址的设置
DKC驱动器的地址是通过固化软件上的旋钮开关来选择的
Indradrive是通过P-0-4025参数来选择的 1, 可通过上位控制器修改P-0-4025参数 2, 可通过面板的2.1command来实现
.**
4
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
SERCOS通讯波特率
▪ DKC驱动器的SERCOS波特率默认是2M,可以通过光缆通讯卡上的开关
来选择的
▪ Indradrive可以通过P-0-4087参数来设定,默认是4M,并且当Indradrive
与SERCOS主站相连后,其波特率是自动扫描出的,可以与MLC同步
.**
5
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
显示的优先权
优先级别
01 F4002
Error Message
01 E2025
Warning
01 C0901
Command errors
01 AF
Status diagnostics
.**
10
© All rights reserved by Bosch Rexroth AG, as well in cases of trade mark rights applications. All rights of disposal as copy of passing by us.
Indradrive 错误的分类
错误代码的分类
错误代码号 F2XXX F3XXX
F4XXX F6XXX F7XXX
F8XXX F9XXX
错误的分类 不是致命的错误
不是致命的错误 相关安全功能的 通讯错误 行程范围错误 行程范围错误 相关安全功能的 致命的错误 致命的系统错误
处理
Like set in P-0-119,best possible deceleration Like set in P-0-119,best possible deceleration 查找通讯故障