C2000 CANOPEN 应用范例
伺服电机的canopen协议例程
伺服电机的CANopen协议例程一、什么是CANopen协议1.1 CAN总线介绍CAN(Controller Area Network)总线是一种串行通信协议,最初由德国Bosch公司开发,用于汽车电子系统之间的通信。
CAN总线具有高可靠性、实时性和抗干扰能力强的特点,因此在工业控制、航空航天、机器人等领域得到了广泛应用。
1.2 CANopen协议概述CANopen是基于CAN总线的一种高层通信协议,它定义了在CAN总线上进行设备之间通信的规范。
CANopen协议提供了一套标准的通信对象和服务,使得不同厂家的设备能够方便地进行通信和集成。
CANopen协议广泛应用于工业自动化领域,特别是伺服电机控制系统中。
二、伺服电机的CANopen协议应用2.1 伺服电机控制系统简介伺服电机是一种能够精确控制位置、速度和力矩的电机。
伺服电机控制系统通常由伺服电机、驱动器和控制器组成。
控制器通过发送控制指令给驱动器,驱动器再将指令转换为电机的运动控制信号,从而实现对电机的精确控制。
2.2 CANopen在伺服电机控制系统中的应用CANopen协议在伺服电机控制系统中扮演着重要的角色。
它定义了伺服电机控制系统中各个设备之间的通信方式和数据格式,使得不同厂家的伺服电机、驱动器和控制器能够进行互联互通。
通过CANopen协议,控制器可以向驱动器发送位置、速度、力矩等控制指令,驱动器则将实际的运动状态反馈给控制器,实现闭环控制。
三、CANopen协议的基本原理3.1 CANopen通信对象CANopen协议定义了一系列通信对象,用于描述设备之间的数据交换。
这些通信对象包括字典对象、PDO(Process Data Object)和SDO(Service Data Object)等。
字典对象用于存储设备的配置参数和状态信息,而PDO和SDO则用于实时数据的传输。
3.2 字典对象字典对象是CANopen协议中最基本的通信对象,它用于存储设备的配置参数和状态信息。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
台达新推出内建CANOpen主站的C2000变频器

梯起重等行业 。
在 工控 领 域 里 ,两 台机 器 以 上 的 变 频器 应 用 ,必须 以 P C 系统 控 制 核 心 , L为 来 满 足逻 辑 演 算 、过 程 控 制 、 计 数 、 计 时 等 复杂 控 制 。 台达 C 0 0系 列 一 改 变 20
随着低 压变频器 市场 的竞争加 剧 , 机械行业用户不仅要求产品具有速度 同
应对 。
机床操作和编程提供更多便利。该纵切
机 还 有各 种 有 用 的 选 项 , 角度 动力 头 、 如 高速 钻 铣 主 轴 和 有 德 马 吉 专 利 的 直 驱 式 旋 风 铣头 。 驱 式 旋风 铣 是 D G 发 的最 直 M开 新 技 术 。 若在 S r n 2 ln a p i t 0 8 i e r纵 切 机 使 用 直 驱 式 旋 风 铣 头 加 工螺 纹 ,表 面 粗 糙度 可 以 达 到 O 1 u m .2 。 S r n 0 8 1 na 可 以提 高 生产 p i t 2— e r i 效率 ,降低 单件 成 本 ,尤 其适 用 于 汽 车 、 液 压 、气 动 元 件 、 电子 和 医 疗 行 业 。
步 的 功 能 , 同 时 也 要 达 到位 置 同 步 的控 制 。 为 满 足用 户对 变频 器 同 步控 制 的 需 求 , 台达 C 0 0系 列 变 频 器 上 搭 载 了 同 20
频器 仅为 纯粹 驱动 的传 统角 色 , 内建 PC L 程序容量达 1 t p 0 K s e ,程序扫描时 问大幅缩短 ,新增多种 高阶应用指 令,
搭配 网络 系 统 可 达 成 分 布 式控 制 与独 立 操 作 等 系 统 功 能 , 并 符 合 CAN0 e P n
D 4 2 范 ,让 C 0 0 动器 整 合 P C S0 规 20 驱 L 可
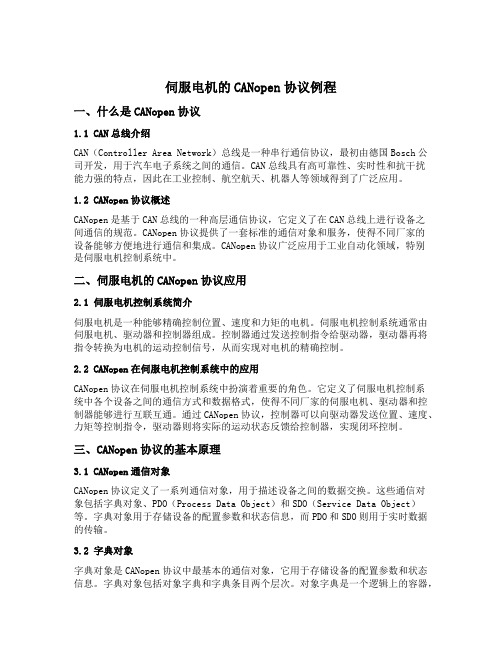
C2000变频器CAN总线操作流程
软件操作第5步: 暂存取映射: 6282->控制字 6283->目标频率 6032->状态字 6033->实际频率 编写PLC软件控制 变频器运行
C2000变频器CAN总线操作步骤
中达电通变频器产品处整理
开始
硬件配置: DVP28SV11R:PLC主机 DVPCOMP-SL台达CAN主站模块 TAP-CB10:1米CAN分支线 TAP-CB01:CAN总电缆 TAP-CN03:CAN总线电缆分接盒 VFD007C23A: 台达 C2000变频器 EMC-COP01:CAN总线接口卡 C2000变频器CAN总线框图
C2000
TAP-CB10
软件操作第3步: 网络上的装置扫描
硬件设置:
软件操作第4步: 对扫描到的变频器图 标双击,进行PDO设 置;RxPDO=6040,6042; TxPDO=6041,6043
参数设置: 00-20=6:频率指令来源 00-21=3:运转指令来源 09-36=2:CANopen从站地址 09-37=0:CANopen速率 09-30=1:变频器通讯解码方式 09-40=1:CANopen解码方式
DVPCOMP-SL DVP28SV
CANopen网络配置:
请下载最新版本delta CANopenBuilder软件
软件操作第1步: 打开CANbuilder操作第2步: 通讯端口设定
EMC-COP01 EMC-COP01
TAP-CN03
C2000
TAP-CB10
CANopen绝对值编码器的实际应用

1).可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其 他节点发送信息,而不分主从,通信方式灵活。
2).网络上的节点可分成不同的优先级,可以满足不同的实时要求。
3).采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优 先级低的 节点主动停止数据发送,而优先级高的节点可不受影响地继续传送数据。
图3-1 预定义连接集ID
Node-ID由系统集成商定义。Node-ID范围是1~127(0不允许被使用)。 如下表格CANopen预定义主/从连接集CAN标识符分配表。Байду номын сангаас
我们读取到一组编码器数据是《0x181 0x30 0x1F 0x00 0x00》,我们应该如何 理解呢?首先,“0x”只是一个符号,它代表了紧跟着的数据是十六进制的(等同于 在数据后面直接标“H”,上述表达式也可以表述为 《181H 30H 1FH 00H 00H》),“181”我们查看上表后发现,它包含在PDO1 (发送)里面,它代表了是由编码器发出的过程数据对象,表上显示是“181H~1FFH”, 这是因为COB-ID包含了节点号信息,地址1对应着181H,地址2对应了182H,以此类 推,最大127个节点。“0x30 0x1F 0x00 0x00”就代表了数据内容,在CAN协议内, 帧数据是低位在前,高位在后的。所以上述数据直接读取后得出编码器送出1F30H, 这就代表了编码器的当前位置值。
功能:主要用于主节点对从节点的参数配置。用来在设备之间传输大 的低优先级数据,典型的是来配置CANopen网络上的设备。
通讯方式:客户机/服务器 它用于访问对象字典的入口。对CANopen对象进行读写。 读/写操作一般由客户端初始化,由服务器服务。
C2000使用手册

TMS320C2000系列DSP寄存器及初始化TMS320LF240X系列DSP使用时,在掌握了其工作原理和过程之后,就要熟练使用DSP自带的一些资源如:IO口、DSRM、SRAM、EVA、,EVB、SCI、SPI、ADC和WD等等;对这些资源的使用很重要的一点就是对其合理配置和初始化,初始化的关键就是对其相关寄存器的设置,设置寄存器必须了解各位的含义,记住每位的含义是不大现实的;为此,我们专门设计了DSP初始化子程序,注明每个模块所用到的寄存器以及每位的含义,以方便设计。
=================================================DSP系统初始化=================================================ARB---辅助寄存器指针缓冲器:当ARP被加载到ST0,除了使用LST指令外,原有的ARP值被复制到ARB中当通过LST#1指令加载ARB时,也把相同的ARB值复制到ARPARP---辅助寄存器指针:ARP选择间接寻址时当前的辅助寄存器AR当ARP被加载时,原有的ARP值被复制到ARB 寄存器中在间接寻址时,ARP可由存储器相关指令改变,也可由LARP,MAR,和LST指令改变当执行LST#1指令时,ARP也可加载每ARB相同的值C---- 进位位:此位在加法结果产生进位时被置为1,或在减法结果产生借位时被清0否则,除了执行带有16 位移位的ADD或SUB指令外,C在加法后被清除或在减法后被设置在ADD或USB指令时,ADD仅可对进位位进行置位而SUB仅可对进位位进行清除,而不会对进位位产生其他影响移1位和循环指令也可影响进位位C,以及SETC、CLRC和LST指令也可影响C条件转移、调用和返回指令可以根据C的状态进行执行复位时C 被置1CNF---片内DARAM配置位:若CNF=0,可配置的双口RAM区被映射到数据存储空间若CNF=I,可配置的双口RAM 区被映射到程序存储空间CNF位可通过SETC CNF,CLRC CNF和LST指令修改R/S/复位时CNF置为0 DP----数据存储器页指针:9位的DP寄存器与一个指令字的低七位一起形成一个16位的直接寻址地址INTM---中断模式位:当INTM被置为0时,所有的未屏蔽中断使能当它被置1,所有可屏蔽中断禁止OV----溢出标志位:该位保存一个被锁存的值,用以指示CALU中是否有溢出发生一旦发生溢出,OV位保持为1直到下列条件中的一个发生时才能被清除OVM---溢出方式位:当OVM=0时,累加器中结果正常溢出当OVM=1时,根据遇到溢出的情况,累加器被设置为它的最大正值或负值SETC指令和CLRC指令分别对该位进行置位和复位PM----乘积移位方式:若PM=00,乘法器的32位乘积结果不移位直接装入CALU若PM=01,PREG输出左移1位后装入CALU,最低位LSB以0填充若PM=10,PREG输出左移4位后装入CALU,最低位LSB以0填充若PM=11,时PREG输出进行符号扩展右移六位SXM----符号扩展方式位:当SXM=1时,数据通过定标移位器传送到累加器时将产生符号扩展SXM=0将抑制符号扩展SXM位对某些指令没有影响TC---- 测试/控制标志位:在下述情况之一,TC位被置1:由BIT或BITT指令测试的位为1当利用NORM指令测试时,累加器的两个最高有效位"异或"功能为真条件转移、调用和返回指令可根据TC位的条件来执行BIT、BITT、CMPR、LST和NORM指令影响TC位XF---- XF引脚状态位:该位决定XF引脚的状态SETCXF指令可对位XF进行置位,而CLRCXF指令可对其进行清0复位时XF置1SCSR1--系统控制和状态寄存器1---地址7018HD15---保留位D14---CLKSRC。
canopen应用案例

canopen应用案例
CanOpen是CAN总线上的一种高级通信协议,广泛应用于工业自动化领域。
下面我们将介绍几个CanOpen应用案例:
1. 焊接设备控制系统
该控制系统使用CanOpen协议实现了所有焊接设备的自动化控制。
每个焊接设备都通过CAN总线连接到一个CanOpen节点,节点之间可以实现实时数据交换。
通过CanOpen协议规定的数据类型、对象字典和服务,可以实现远程节点的配置、控制和诊断。
2. 电动汽车电池管理系统
电动汽车电池管理系统需要对车载电池进行实时监测和控制,以保证电池的安全和性能。
该系统使用CanOpen协议实现了电池管理单元和控制器之间的通信,可以实时获取电池的电压、温度、电量等参数,并根据控制器的指令进行充放电控制。
3. 工业机器人控制系统
工业机器人控制系统需要对机器人的运动轨迹、速度、力度等参数进行实时控制。
该控制系统使用CanOpen协议实现了机器人控制器和各个关节的通信。
通过CanOpen协议规定的PDO和SDO数据传输方式,可以实现高速、实时的数据传输。
4. 液压系统控制
液压系统控制需要对液压泵、电磁阀、油温传感器等设备进行精确控制。
该控制系统使用CanOpen协议实现了液压控制器和各个液压设备的通信。
通过CanOpen协议规定的服务和PDO数据传输方式,可
以实现实时的控制和反馈。
canopen eds 例子

canopen eds 例子
CANopen是一种基于CAN总线的高级通信协议,用于工业控制
系统中的设备之间的通信。
EDS(Electronic Data Sheet)是CANopen设备描述文件的一种格式,它描述了CANopen设备的通信
参数、对象字典、功能码等信息。
下面我会举一个简单的CANopen EDS的例子来帮助你理解。
假设我们有一个简单的CANopen设备,比如一个温度传感器。
它的EDS文件可能包含以下信息:
1. 设备的标识信息,比如制造商、设备类型等。
2. 通信参数,比如设备的节点ID、波特率等。
3. 对象字典,描述了设备支持的各种数据对象,比如温度数值、设备状态等。
4. PDO(Process Data Object)映射,描述了设备支持的PDO
通信方式,即实时数据的传输方式。
举个简单的例子,假设温度传感器的EDS文件中包含了一个温
度数据对象,它的索引是0x6200,数据类型是16位整数,表示温
度值。
这个EDS文件还会定义这个对象的访问权限、单位等信息。
另外,EDS文件还包含了设备支持的各种功能码,比如NMT(网
络管理)、SDO(服务数据对象)等,以及它们的参数和使用方法。
总的来说,一个CANopen EDS文件包含了设备的详细描述信息,使得CANopen主站可以准确地与设备进行通信和控制。
希望这个例
子能帮助你更好地理解CANopen EDS文件的作用和内容。
合信技术CANopen用户手册V1.50

CTSC-200CANopen系列产品用户手册深圳市合信自动化技术有限公司发布日期:02/2013手册版本:V1.50版权声明Copyright©2012深圳市合信自动化技术有限公司版权所有,保留一切权利。
非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文件内容的部分或全部,并不得以任何形式传播。
、TrustPLC、CoPanel均为合信自动化技术有限公司的商标。
对于本文件中出现的其它商标,由各自的所有人拥有。
为了便于说明,本文中使用部分软件截图,对于这些软件版权,由各自的所有人拥有。
由于产品版本升级或其它原因,本文件内容会不定期进行更新。
除非另有约定,本文件仅作为使用参考,本文件中的所有陈述、信息和建议不构成任何明示或暗示的担保。
免责声明CTSC-200CANopen系列产品的安装、操作、维护工作仅限于合格人员执行。
对于使用本资料所引发的任何后果,合信概不负责。
安全注意事项在开始使用之前,请认真阅读用户手册的注意事项,以避免意外事故的发生。
所负责产品安装、操作的人员必须经过严格培训,遵守相关行业的安全规范,严格遵守该手册提供的相关设备注意事项和特殊安全指示,按正确的操作方法进行设备的各项操作。
本手册中,将安全注意事项分为“警告”、“注意”与“提示”三个等级:警告该标记表示“由于没有按要求操作造成的危险,可能导致人身伤亡”。
注意该标记表示“由于没有按要求操作造成的危险,可能会导致人身轻度或中度伤害和设备损坏”。
提示该标记表示“对操作的描述进行必要的补充或说明”。
※使用中的注意事项使用中必须有安全电路,保证当外部电源掉电或可编程控制器故障时,可编程控制器的应用系统能安全工作。
在使用的设计中应考虑的方面包括:必须在可编程控制器的外部电路中加设紧急制动电路、保护电路、正反转操作互锁电路和防止机器损坏的位置上限、下限互锁开关。
为确保使设备能安全运行,对重大事故相关的输出信号,请务必设计外部保护电路和安全机构。
台达C2000变频器调试数据

C2000-1VFD-C2000P R C 350116975032013-04黄承刚专用C2000-2123用2U00-04 3A00-040A1c2H.3DC-BUS v4U, V, WE5n6kWP7rpmr8%,100%t9PG G(10-0010-01)10PID%b11AVI% 1.12ACI% 2.13AUI% 3.14IGBTi.15c.16ON/OFF i17ON/OFF o18S19CPUd.20CPU0.21(PG PG 1)P.22(PG PG 2)S.23(PG PG 2)q.24E.25(0.00~100.00%)(h.)26GFF(:%)(G.)27Dcbus(:Vdc) (r.)28PLC D1043C29(EMC-PG01U)(4.)30(U)3100-05(K)32:3黄承刚专用C2000-3(PG Z) (Z.)33:(PG)(q)34:(%) (F.)35:0:(SPD); 1:(TQR) (t.)36:(Hz) (J.)37:38:(6.)39:Nt-mt 0.0- 0.0C.40:%(h.)41: KWH KWH(J)42: PID%(L)43: PID%(o.)44: PID,Hz(b.)00-050~160.00 1 00-06#.#00-070655350~200-08065535000-07100-0900-10012300-11 0: VF V/F1: VFPG V/F+2: SVC3: FOCPG+4: FOCPG+5: FOC Sensorless()6: PM Sensorless ()00-120100-130: TQCPG+1: TQCPG (+)2: TQC Sensorless ()00-14 00-1500-1601黄承刚专用C2000-400-17230V [460V]1-15HP [1-20HP] 2~15KHz20-50HP [25-75HP] 2~10KHz60-125HP [100-475HP] 2~09KHz 230V [460V]1-15HP [1-20HP] 2~15KHz20-50HP [25-75HP] 2~10KHz60-125HP [100-475HP] 2~09KHz864200-1800-19 PLC Bit 0: PLCBit 1: PLCBit 2: PLCBit 3: PLC00-1900-20AUTO 01RS485203-003up/down4(Pulse)(10-16)5(Pulse)(10-16)6CANopen78(CANopen)00-21AUTO 012RS-4853CANopen45(CANopen)00-220100-2301200-2400-25Bit 0~3:0000b:0001b: 10010b: 20011b: 3Bit 4~15:000xh: Hz001xh: rpm002xh: %003xh: kg004xh: M/S005xh: kW006xh: HP007xh: PPM008xh: l / m009xh: kg/s00Axh: kg/m00Bxh: kg/h00Cxh: lb/s00Dxh: lb/m00Exh: lb/h00Fxh: ft/s010xh: ft/m黄承刚专用C2000-5C2000-6011xh: M 012xh: ft 013xh: degC 014xh: degF 015xh: mbar 016xh: bar 017xh: Pa 018xh: kPa 019xh: mWG 01Axh: inWG 01Bxh: ftWG 01Cxh: Psi 01Dxh: Atm 01Exh: L/s 01Fxh: L/m 020xh: L/h 021xh: m3/s 022xh: m3/h 023xh: GPM 024xh: CFM 00-260~65535 (00-25)0.0~6553.5 (00-251)0.0~655.35 (00-252)0.0~65.535 (00-253)00-2700-2800-29LOCAL/REMOTE0HOA 1Local/Remote 2Local/Remote ,Remote3Local/Remote ,Local4Local/Remote ,00-30HAND01RS485203-003up/down 4(Pulse)(10-16)5(Pulse)(10-16) 6CANopen78(CANopen)000-31HAND012RS-485 3CANopen45(CANopen )000-32STOP0:STOP 1:STOP00-33~00-39黄承刚专用C2000-7黄用台达C2000变频器.pdf调试数据Array用C2000-801-45=10.0~250.00.201-27S201-45=00.00~25.0001-45=10.0~250.00.200.201-2810.00~600.00Hz 0.00 01-2910.00~600.00Hz 0.00 01-3020.00~600.00Hz 0.00 01-3120.00~600.00Hz 0.00 01-3230.00~600.00Hz 0.00 01-3330.00~600.00Hz 0.0001-34012Fmin (01-0701-41)01-3520.00~600.00Hz 60.00/ 50.0001-362230V0.0V~255.0V460V0.0V~510.0V200.0400.001-37210.00~600.00Hz 3.0001-3821230V0.0V~240.0V460V0.0V~480.0V11.022.001-39220.00~600.00Hz 0.5001-4022230V0.0V~240.0V460V0.0V~480.0V2.04.001-4120.00~600.00Hz 0.0001-422230V0.0V~240.0V460V0.0V~480.0V0.00.001-43 V/F 001-00~01-081 1.52201-440123401-12~01-2101-45S00.0110.101-46CANopen01-45=0: 0.00~600.0001-45=1: 0.0~6000.01.00黄承刚专用C2000-9用C2000-103738EEPROM394041HAND42AUTO4302-4844NL45PL46ORG47484950dEb51PLC bit 0 52PLC bit 1 53CANopen54~5556: Local/Remote57~70:02-09UP/DOWN 0up/down1up/down(02-10)02-10UP/DOWN0.01~1.00Hz/ms 0.0102-11 0.000~30.0000.005 02-120000h~FFFFh0N.O.1N.C.0000 02-13 1 RY1 011 02-14 2 RY2 1 1 02-16 3 (MO1)20 02-17 4 (MO2)3 1 (02-22)002-36(MO10)4 2 (02-24)002-37(MO11)5()002-38(MO12)6STOP()002-39(MO13)71(06-06~06-08)002-40(MO14)82(06-09~06-11)002-41(MO15)9002-42(MO16)10LV(06-00)002-43(MO17)11002-44(MO18)12(02-32)002-45(MO19)13(06-15)002-46(MO20)14(07-00)0 15PID16(oSL)17002-20黄承刚专用C2000-11C2000-1218002-1919 B. B.(BaseBlock) 20 21 22 23 24 25262702-33(>= 02-33) 2802-33,(<=02-33) 2902-34 (>= 02-34) 3002-34 (<= 02-34)31Y 32 33()34Stop ()35 1 (06-23) 36 2 (06-24) 37 3 (06-25) 38 4 (06-26) 39 (10-19)40 41424302-4744(06-71~06-73)45UVW 46dEb 47 484950CANopen51RS485 5253~6202-180000h~FFFFh 0N.O.1N.C.000002-19(0)0~65500 0 02-20(0)0~65500 0 02-21(DFM)11661 02-22 1 0.00600.00Hz 60.00/50.0002-2310.00600.00Hz 2.0002-242 0.00600.00Hz 60.00/50.0002-2520.00600.00Hz 2.0002-320.000~65.000 0.00002-330~100%黄承刚专用02-340.00~600.00Hz PG3.0002-3501002-470~65535 rpm 0 02-480.01~600.00Hz 60.00 02-490.000~65.0000.000 02-5002-5102-52PLCPLC02-53PLCPLC02-5402-5502-5602-57420~150%0 02-58420.00~655.35Hz0.00黄承刚专用C2000-13用C2000-14C2000-155DC Bus6789AVI10ACI 11AUI 12Iq 13Iq 14Id 15Id 16Vq 17Vd 1819PG220CANopen 21RS485222303-21AFM 10~500.0% 100.003-22AFM 1010V0-10V25-0V5-10V 003-24AFM 20~500.0% 100.003-25AFM 2010V0-10V25-0V5-10V003-2603-27AFM2-100.00~100.00% 0.0003-28AVI 0: 0-10V 1: 0-20mA 2: 4-20mA 003-29ACI 0: 4-20mA 1: 0-10V 2: 0-20mA003-30PLCPLC03-31AFM2 0-20mA 0: 0-20mA 1: 4-20mA 003-32AFM10.00~100.00% 0.0003-33AFM20.00~100.00% 0.0003-3403-35AFM10.00 ~ 20.00 0.0103-36AFM20.00 ~ 20.00 0,0103-37~03-4903-500:1: AVI 2: ACI3: AVI & ACI 4: AUI5: AVI & AUI 6: ACI & AUI黄承刚专用7: AVI & ACI & AUI03-51 AVI 03-28=0, 0.00~10.00V03-280, 0.00~20.00mA0.0003-52AVI0.00~100.00% 0.0003-53 AVI 03-28=0, 0.00~10.00V03-280, 0.00~20.00mA5.0003-54AVI0.00~100.00% 50.0003-55 AVI 03-28=0, 0.00~10.00V03-280, 0.00~20.00mA10.0003-56AVI0.00~100.00% 100.0003-57 ACI 03-29=1, 0.00~10.00V03-291, 0.00~20.00mA4.0003-58ACI0.00~100.00% 0.0003-59 ACI 03-29=1, 0.00~10.00V03-291, 0.00~20.00mA12.0003-60ACI0.00~100.00% 50.0003-61 ACI 03-29=1, 0.00~10.00V03-291, 0.00~20.00mA20.0003-62ACI0.00~100.00% 100.0003-63AUI0.00~10.00V 0.0003-64AUI0.00~100.00% 0.0003-65AUI0.00~10.00V 5.0003-66AUI0.00~100.00% 50.0003-67AUI0.00~10.00V 10.0003-68AUI0.00~100.00% 100.0003-69AUI0.00~10.00V 0.0003-70AUI0.00~100.00% 0.0003-71AUI0.00~-10.00V -5.0003-72AUI0.00~-100.00% -50.0003-73AUI0.00~-10.00V -10.0003-74AUI0.00~-100.00% -100.00黄承刚专用C2000-16用C2000-1704-55PLC60~65535 0 04-56PLC70~65535 0 04-57PLC80~65535 0 04-58PLC90~65535 0 04-59PLC100~65535 0黄承刚专用C2000-18用C2000-19W-Hour05-29KW-Hour#.#05-30KW-Hour#.#05-31()00~143905-32()00~6553505-330:1:05-340.00~655.35Amps 0.00 05-350.00~655.35kW 0.00 05-360~65535rpm2000 05-370~6553510 05-380.0~6553.5kg.m20.0 05-390.000~65.5350.000 05-40Ld0.00~655.35mH 0.000 05-41Lq0.00~655.35mH 0.000 05-420.0~360.00.0 05-43Ke0~65535 (: V/1000rpm) 0黄承刚专用C2000-20用C2000-21C2000-22 06-15OH 0.0~110.085.006-160100% (06-0306-04)5006-170 0 06-181ocA 0 06-192ocd 0 06-203ocn 0 06-214GFF 0 06-225occ IGBT 0 6ocS 7ovA 8ovd 9ovn 10ovS 11LvA 12Lvd 13Lvn 14LvS 15OrP 16oH1 (IGBT )17oH2 (40HP )18tH1o (TH1 open IGBT )19tH2o (TH2 open )2021oL (150%)22EoL1 (1)23EoL2 (2)24oH3 (PTC) 2526ot1 1 27ot2 2 28uC 29LMIT 30cF131cF23233cd1 U34cd2 V35cd3 W36Hd0 cc37Hd1 oc38Hd2 ov39Hd3 occ IGBT40AUE41AFE PID42PGF1 PG43PGF2 PG44PGF3 PG45PGF4 PG黄承刚专用C2000-23 46PGr1 PG ref 47PGr2 PG ref 48ACE 49EF 50EF151bb 52Pcod 5354CE155CE256CE357CE458CE10 Time Out 59CP10 PU Time out 60bF 61ydc Y-62dEb63oSL64ryF65 : PGF5 PG Card66~6768Sensorless69Sensorless70Sensorless 71~72:73S174~78:79: Uoc U80: Voc V81: Woc W82: OPHL U83: OPHL V84: OPHL W 85:86:87~89:90PLC100:101CGdE CANopen1102CHbE CANopen2103CSYE CANopen104CbFE CANopen105CIdE CANopen106CAdE CANopen107CFrE CANopen111InrCOM06-23 1 0~65535(bit )0 06-24 2 0~65535(bit )0 06-25 3 0~65535(bit )0黄承刚专用C2000-24 06-26 4 0~65535(bit )0 06-27 2 ( 2) 012206-28 2( 2) 30.0~600.060.006-29 PTC 012306-30 PTC 0.0100.0% 50.006-31 0.00~655.35 Hz06-32 0.00~655.35 Hz06-330.0~6553.5 V06-340.0~6553.5 V06-350.00~655.35 Amp06-36IGBT 0.0~6553.506-37Heat Sink 0.0~6553.506-38rpm 0~6553506-39 0~6553506-400000h~FFFFh06-410000h~FFFFh06-420000h~FFFFh 06-4306-4406-45(OPL) 012306-460.000~65.5350.50006-47 0.00~655.35%1.0006-480.000~65.5350.10006-4906-50 06-5106-52 06-53OrP 01006-5406-55012(0)06-56 PT10010.000~10.000V 5.00006-57 PT10020.000~10.000V 7.00006-58PT10010.00~600.00Hz 0.0006-5906-60GFF 0.0~6553.5 % 60.0黄承刚专用C2000-25 06-61GFF 0.0~6553.5 % 0.1006-62dEb 230V : 0.0~220.0 Vdc 460V : 0.0~440.0 Vdc 180.0/360.006-6306-6406-6506-6606-6706-6806-6906-7006-71 0.0 ~ 6553.5 % 0.0 06-72 0.00 ~ 655.35 0.0006-730 :1 :2 :3 : 0黄承刚专用C2000-26C2000-27 07-26V/FSVC 0~100 07-27V/FSVC 0.00~10.000.0007-2807-290.0~100.0%007-300.0~10.01.007-310123007-32 0~10000100007-330.0~6000.060.0黄承刚专用黄C2000-28C2000-29C2000-30 -11:-12:PLC 09-32~09-3409-35 PLC 1~254 2 09-36CANopen 0: Disable 1~127009-37CANopen 01M 1500k 2: 250k 3: 125k 4: 100k ()5: 50k 009-38 CANopen 1.00 ~ 2.00 1.0009-39 CANopen bit 0CANopen Guarding Time out bit 1CANopen Heartbeat Time out bit 2CANopen SYNC Time out bit 3CANopen SDO Time out bit 4CANopen SDO buffer overflow bit 5Can Bus Off bit 6Error protocol of CANopen 009-40CANopen 01CANopen DS402109-41 CANopen 0Node Reset State 1Com Reset State 2Boot up State 3Pre Operation State 4Operation State 5Stop State 09-42CANopen 0Not Ready For UseState 1Inhibit Start State 2Ready T o Switch On State 3Switched On State 4Enable Operation State 7Quick Stop Active State 13Err Reaction Active State 14Error State 09-43CANopenbit0: CANopen 20XX 0bit1: CANopen 264X 0bit2: CANopen26AX 0bit3: CANopen60XX 06553509-4409-45CANopen 0: Disable 1:Enable 009-46 CANopen 1~127 100 黄承刚专用C2000-31 09-47~09-5909-6001DeviceNet Slave2Profibus-DP Slave3CANopen Slave/Master 4Modbus-TCP Slave5EtherNet/IP Slave6~8##09-61 ## 09-62 ## 09-63 ## 09-64~09-6909-70DeviceNet: 0-63Profibus-DP: 1-125 109-71Standard DeviceNet:0: 125Kbps1: 250Kbps2: 500Kbps3: 1Mbps ()Non standard DeviceNet: ()0: 10Kbps 1: 20Kbps2: 50Kbps3: 100Kbps 4: 125Kbps5: 250Kbps6: 500Kbps7: 800Kbps8: 1Mbps209-720:0123DeviceNet1:DeviceNetCANopen(0-8)09-7309-7409-75IP Configuration0IP1IP (DHCP) 009-76IP 1 0~255 0 09-77IP 2 0~255 0 09-78IP 3 0~255 0 09-79IP 4 0~255 0 09-80 1 0~255 0 09-81 2 0~255 0 09-82 3 0~255 0 09-83 4 0~255 0 09-84Getway10~255 0 09-85Getway 20~255 0 09-86Getway 30~255 0 09-87Getway 40~255 0 09-88(Lowword) 0~255 0黄承刚专用C2000-32 09-89(Highword) 0~255 0 09-9001009-91Bit 0: Enable IP Filter :Bit 1: Internet parametersenable(1bit)EnablebitDisable Bit 2: Login passwordenable(1bit)EnablebitDisable09-92Bit 0: password enableEnablebit EnablebitDisable黄承刚专用C2000-33C2000-34 10-21PG20.000~65.5350.10010-22PG20:1: ()010-23 10-24 FOC&TQC 0~65535 0 10-25 FOC 20.0~100.0Hz 40.010-26FOC 0.0~10.0%fN 2.0 10-27FOC 1~1000ms 50 10-28FOC 33~100%Tr 100 10-29 0.00~100.00Hz 20.0010-30 Resolver 1~50 1 10-31I/F 0~150%Irated ()4010-32PM FOC Sensorless 0.00~600.00Hz 5.0010-33 10-34PM Sensorless 0.00~655.35 Hz 1.0010-35 10-36 10-37PM Sensorless 0000~FFFFh 000010-3810-39I/F PMSensorless 0.00~600.00Hz 20.0010-40PM SensorlessV/F 0.00~600.00Hz20.0010-41I/F Id 0.0~6.0sec0.2 10-42 0~20ms510-43PG 0~655.35黄承刚专用C2000-35C2000-36 11-38 1(00-20)11-37/11-382(00-20)11-37 0~120% 10 11-38 0~120% 10 11-39 01011-40 0:1:2: RS4853: CAN 4: PLC5:11-41 11-42 0000~FFFFh 000011-43 0.00~327.67Hz 10.0011-44 0.00~655.35 1.0011-45 0.00~655.35 3.00黄承刚专用。
台达工控产品CANopen解决方案

台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Delta industrial products is presented, which displays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络(Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
A.DVPCOPM-SL具备特性为:●CANopen通讯主站,可连接127个站点;●最快通讯速率达到1M bps;●最长的网络长度可支持1000m(配合合适的通讯速率和物理线材);●具有同步和异步的通讯能力;B.C2000具备的特性为:●支持CANopen主站连接(仍在测试中);●CANopen通讯直接连接无需转换;●最快通讯速率达到1M bps;●By Pass连接功能(搭配外部扩展卡);C.A2具备的特性为:●最快通讯速率达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;●By pass 连接功能;D.E-C具备的特性为:●最快通讯速度达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;可以看出,台达工控产品中,真正能实现CANopen直接通讯的非控制类产品目前为C2000变频器、A2伺服驱动器以及E-C变频器,之所以称为直接通讯是因为其无需通讯模式的转换,而直接采用CANopen物理连接。
canopen运动控制在plc中的实际应用案例
canopen运动控制在plc中的实际应用案例
实际应用案例:
1. 木工机械:在木工机械设备中,可以使用CANopen运动控制实现对木工机械操作的精准控制,如木板的切割、锯切和镶嵌等。
2. 包装机械:在包装机械设备中,可以使用CANopen运动控制实现对包装过程中的各个步骤的精确控制,如输送带、封口机、卷帘门等的协同工作。
3. 机械手臂:在机械工业中,机械手臂扮演着重要角色,CANopen运动控制可以实现机械手臂的自动化控制,用于工厂生产线上的装配、搬运和处理等工作。
4. 流水线:在生产流水线上,使用CANopen运动控制可以实现对多个设备的协同运行,如输送带、旋转装置和机器人等设备的同步操作。
5. 灌装设备:在液体灌装设备中,使用CANopen运动控制可以精确控制液体的流量和灌装速度,确保产品灌装过程的均匀性和准确性。
这些案例只是CANopen运动控制在PLC中的实际应用中的一小部分,其它领域如纺织、电子、物流等也可以应用CANopen运动控制技术,实现精准控制和自动化生产。
canopen报文控制电机旋转实例

canopen报文控制电机旋转实例CanOpen是一种用于工业控制领域的通信协议,它广泛应用于各种自动化设备中,包括电机控制系统。
本文将以一个实例来说明如何使用CanOpen报文控制电机旋转。
我们需要了解CanOpen协议的基本概念。
CanOpen协议是基于CAN总线的通信协议,它定义了一系列的报文格式和通信规则,用于实现设备之间的数据交换和控制命令传输。
在CanOpen协议中,每个设备都有唯一的节点ID,用于区分不同的设备。
设备之间通过发送和接收CanOpen报文来进行通信。
在控制电机旋转的实例中,我们假设有一个主控制器和一个电机驱动器。
主控制器通过CanOpen报文向电机驱动器发送控制命令,电机驱动器接收到命令后,通过控制电机的转速和方向来实现旋转。
主控制器需要向电机驱动器发送初始化报文,以建立通信连接。
在CanOpen协议中,这个过程称为节点配置。
主控制器发送的初始化报文中包含了节点ID和一些其他的参数,用于告诉电机驱动器如何进行配置。
电机驱动器接收到初始化报文后,根据报文中的参数进行配置,并发送配置完成的报文给主控制器,表示已经准备好接收控制命令了。
接下来,主控制器可以向电机驱动器发送控制命令。
在CanOpen 协议中,控制命令通过发送PDO(Process Data Object)报文来实现。
PDO报文中包含了控制命令的具体信息,比如转速和方向。
主控制器发送PDO报文给电机驱动器后,电机驱动器会根据报文中的信息来控制电机的旋转。
除了控制命令,CanOpen协议还支持一些其他的功能,比如查询设备状态和获取设备参数。
主控制器可以通过发送SDO(Service Data Object)报文来实现这些功能。
SDO报文中包含了具体的查询或获取参数的指令,电机驱动器收到SDO报文后,会根据指令来返回相应的数据或者状态信息。
需要注意的是,在使用CanOpen协议控制电机旋转时,需要严格按照报文格式和通信规则来进行操作,以确保通信的可靠性和稳定性。
can报文实例解析和canopen报文实例解析

can报文实例解析和canopen报文实例解析CAN报文实例解析:CAN(Controller Area Network)是一种常用的实时网络通信协议,常用于汽车、工业控制等领域。
CAN总线上的通信消息被称为CAN帧,它由CAN标识符、数据长度码、数据域和CRC校验等部分组成。
下面我们通过一个简单的CAN报文实例来解析CAN帧的结构。
假设我们有一个CAN帧,CAN标识符为0x123,数据长度码为8,数据域为0x12 0x34 0x56 0x78。
根据CAN帧的结构,我们可以将这个CAN帧拆分为以下几个部分:1. CAN标识符:0x123,占11位。
CAN标识符用于标识CAN总线上的消息发送者和接收者,以及消息的优先级。
不同的CAN设备可以根据CAN标识符识别消息的类型和发送者。
2. 数据长度码:8,占4位。
数据长度码指示了CAN帧数据域中的字节数量,最大可传输的数据长度为8个字节。
3. 数据域:0x12 0x34 0x56 0x78,共32位。
数据域是CAN帧中实际传输数据的部分,这里包含了4个字节的数据,分别为0x12、0x34、0x56、0x78。
4. CRC校验:CRC校验用于检测CAN帧数据的完整性,保证数据的传输正确性。
通过以上分析,我们可以看到一个CAN帧的结构非常清晰,每个部分都有特定的作用,确保数据的可靠传输。
CAN总线的高效性和实时性使得它在许多领域得到广泛应用,带来了许多便利和效益。
CANopen报文实例解析:CANopen是建立在CAN总线上的高层协议,用于实现设备之间的通信和控制。
CANopen报文是CANopen协议中的基本通信单元,包括了多个字段,用于描述消息的类型、数据内容和发送者等信息。
下面我们通过一个简单的CANopen报文实例来解析CANopen报文的结构。
假设我们有一个CANopen报文,包含了一个NMT(网络管理)帧,其CAN标识符为0x700,数据长度码为2,数据域为0x01 0x05。
can报文实例解析和canopen报文实例解析

can报文实例解析和canopen报文实例解析CAN(Controller Area Network)是一种用于汽车和其他工业应用的通讯协议。
它使用多主站结构,允许多个节点同时通讯。
而CANopen是CAN协议的一个应用层协议,用于扩展CAN通讯的应用范围。
对于CAN报文实例解析,它涉及到对实际接收到的CAN报文的解析过程。
这通常包括以下几个步骤:1.帧接收:当CAN控制器接收到一个帧时,它会将其存储在缓冲区中。
2.错误检查:CAN控制器会对接收到的帧进行错误检查,包括检查位错误、填充错误等。
3.帧处理:如果帧通过了错误检查,控制器会将其发送到应用层进行处理。
4.应用层解析:在应用层,根据CANopen协议或其他相关协议,解析出帧中的数据,并将其转换为有意义的信息。
对于CANopen报文实例解析,它是在CANopen协议的基础上进行的。
CANopen 定义了设备如何通过CAN总线进行通讯,包括设备如何发送和接收数据,以及如何处理错误等。
在CANopen报文实例解析中,通常需要遵循以下步骤:1.设备识别:首先确定接收到的CAN帧是哪个设备的消息。
2.节点通讯管理:根据CANopen协议,处理节点之间的通讯,包括数据请求和响应等。
3.数据解析:根据设备的对象字典(Object Dictionary)解析出实际的数据。
对象字典定义了设备中各种参数的地址和类型。
4.应用处理:将解析出的数据应用到实际的应用中,例如控制设备的动作等。
总的来说,无论是普通的CAN报文实例解析还是CANopen报文实例解析,关键在于正确地解析出帧中的数据,并根据相关协议进行相应的处理。
在实际应用中,解析过程可能会根据具体的设备和需求有所不同。
C2000CANOPEN应用范例
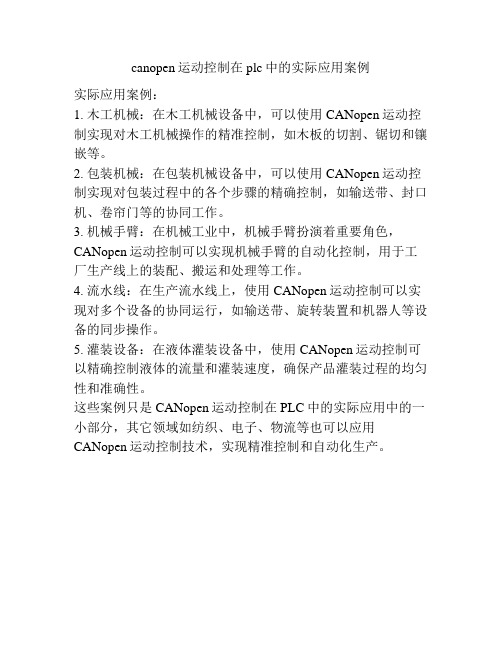
应用范例:通过DVPCOPM-SL(CANOPEN主站)控制C2000变频器¢控制要求当X0=ON 时,启动变频器,使其以40Hz 的频率正方向运转;当X1=ON 时,变频器停止输出,并设置目标频率为0Hz。
¢DVPCOPM-SL和C2000变频器硬件连接示意图产品名称产品说明DVPCOPM-SL 台达CANOPEN主站模块VFD-C 台达C2000变频器EMC-COP01 C2000变频器CANOPEN通讯卡TAP-CB01 标准CANOPEN总线主干线电缆TAP-CB03 标准CANOPEN总线分支线电缆TAP-CN03 CANOPEN总线电缆分接盒¢C2000 变频器参数设置参数设置值说明00-20 6 频率指令来源由CANOPEN通讯卡控制。
00-21 3 运转指令来源由CANOPEN通讯卡控制09-36 2 C2000变频器CANOPEN地址。
09-37 0 C2000变频器CANOPEN通讯速率选择。
0:1Mbps1: 500Kbps2: 250Kbps3: 125Kbps4: 100 Kbps5: 50Kbps09-30 0 变频器通讯解码方式选择。
0:20XX区域的地址有效。
1: 60XX区域的地址有效。
09-40 0 CANOPEN解码方式选择。
0:由C2000自己定义。
1:CANOPEN标准DS402规范。
09-45 0 C2000主从站模式选择。
0:C2000做CANOPEN从站。
1:C2000做CANOPEN主站。
¢此范例中按照下表分别对DVPCOPM-SL 主站模块、C2000变频器进行设置模块名称节点地址通讯速率DVPCOPM-SL 主站模块01 1M bpsC2000变频器02 1M bps备注:DVPCOPM-SL通讯速率、节点地址及接线可参考DVPCOPM-SL手册。
¢使用CANopenBuilder网络配置工具配置CANOPEN网络Ø EDS文件的添加EDS文件为文字档,用以描述设备的参数信息。
CANOPEN协议应用

PDO 能做什么?
CAN总线 CANopen协议 应用
12
Internal usage only
CANopen协议
PDO 能做什么?
CAN总线 CANopen协议 应用
13
Internal usage only
CANopen协议
PDO 怎么用?
- PDO通信参数 - PDO映射参数
总线长度
25 m 50 m 100 m 250 m 500 m 1000 m 2500 m 5000 m
CAN总线 CANopen协议 应用
CAN具有完善的错误检测机制;采用“多重访问冲突仲裁” 机制的帧传输方式,可保证不丢失信息;每一帧中最多可以 传输8个字节数据,可提供很的实时性。
CANopen通信
- Process Data Objects (PDO) 过程数据对象 - Service Data Object (SDO) 服务数据对象 - Special Object Protocols 预定义报文或者特殊功能对象
CANOPEN协议详解【范本模板】

一、CAN—BUS介绍1.CAN的基本概念、特点CAN 是Controller Area Network的缩写(以下称为CAN),是ISO*1国际标准化的串行通信协议。
CAN 协议如表3 所示涵盖了ISO 规定的OSI 基本参照模型中的传输层、数据链路层及物理层.CAN 协议中关于ISO/OSI 基本参照模型中的传输层、数据链路层及物理层,具体有哪些定义如图所示。
ISO/OSI 基本参照模型【注】*1 OSI:Open Systems Interconnection (开放式系统间互联)CAN的特点CAN 协议具有以下特点。
(1) 多主控制在总线空闲时,所有的单元都可开始发送消息(多主控制)。
最先访问总线的单元可获得发送权。
(2) 消息的发送在CAN 协议中,所有的消息都以固定的格式发送。
总线空闲时,所有与总线相连的单元都可以开始发送新消息。
两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为ID)决定优先级。
ID 并不是表示发送的目的地址,而是表示访问总线的消息的优先级。
两个以上的单元同时开始发送消息时,对各消息ID 的每个位进行逐个仲裁比较。
仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
(3) 系统的柔软性与总线相连的单元没有类似于“地址"的信息。
因此在总线上增加单元时,连接在总线上的其它单元的软硬件及应用层都不需要改变。
(4)通信速度根据整个网络的规模,可设定适合的通信速度。
在同一网络中,所有单元必须设定成统一的通信速度。
即使有一个单元的通信速度与其它的不一样,此单元也会输出错误信号,妨碍整个网络的通信.不同网络间则可以有不同的通信速度。
(5) 远程数据请求可通过发送“遥控帧" 请求其他单元发送数据.(6) 错误检测功能·错误通知功能·错误恢复功能所有的单元都可以检测错误(错误检测功能)。
台达工控产品canopen解决方案

台达工控产品canopen解决方案台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Deltaindustrial products is presented, whichdisplays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络 (Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
应用范例:通过DVPCOPM-SL(CANOPEN主站)控制C2000变频器¢控制要求当X0=ON 时,启动变频器,使其以40Hz 的频率正方向运转;当X1=ON 时,变频器停止输出,并设置目标频率为0Hz。
¢DVPCOPM-SL和C2000变频器硬件连接示意图产品名称产品说明DVPCOPM-SL 台达CANOPEN主站模块VFD-C 台达C2000变频器EMC-COP01 C2000变频器CANOPEN通讯卡TAP-CB01 标准CANOPEN总线主干线电缆TAP-CB03 标准CANOPEN总线分支线电缆TAP-CN03 CANOPEN总线电缆分接盒¢C2000 变频器参数设置参数设置值说明00-20 6 频率指令来源由CANOPEN通讯卡控制。
00-21 3 运转指令来源由CANOPEN通讯卡控制09-36 2 C2000变频器CANOPEN地址。
09-37 0 C2000变频器CANOPEN通讯速率选择。
0:1Mbps1: 500Kbps2: 250Kbps3: 125Kbps4: 100 Kbps5: 50Kbps09-30 0 变频器通讯解码方式选择。
0:20XX区域的地址有效。
1: 60XX区域的地址有效。
09-40 0 CANOPEN解码方式选择。
0:由C2000自己定义。
1:CANOPEN标准DS402规范。
09-45 0 C2000主从站模式选择。
0:C2000做CANOPEN从站。
1:C2000做CANOPEN主站。
¢此范例中按照下表分别对DVPCOPM-SL 主站模块、C2000变频器进行设置模块名称节点地址通讯速率DVPCOPM-SL 主站模块01 1M bpsC2000变频器02 1M bps备注:DVPCOPM-SL通讯速率、节点地址及接线可参考DVPCOPM-SL手册。
¢使用CANopenBuilder网络配置工具配置CANOPEN网络Ø EDS文件的添加EDS文件为文字档,用以描述设备的参数信息。
CANopenBuilder软件中导入C2000变频器的EDS后,软件才可以识别及配置C2000变频器。
1. 打开Delta CANopenBuilder 软件,软件界面如下图所示。
2. 在弹出EDS操作对选择『工具(T)』菜单,点选『EDS操作』会弹出EDS操作对话框。
3. 如下图所示,在弹出EDS操作对话框中,点击“下一步”按钮。
4. 如下图所示,点击“浏览”按钮选择EDS的存放路径。
5. 点击上图所示的“浏览”按钮后,选择C2000变频器的EDS后,点击“打开”按钮。
6. 如下图所示,为C2000变频器选择图标。
7. 如下图所示,点击“完成”按钮,完成C2000变频器EDS在CANopenBuilder软件中的导入。
Ø 主从站参数配置1. 打开Delta CANopenBuilder 软件,软件界面如下图所示。
2.选择『设置(S )』菜单,点选『通讯设置』,再选择『系统通道』,弹出“串口设定”界面。
串口设定说明:项目 说明默认值 通讯端口 设置与SV PLC 通讯的计算机串口COM1 通讯地址 设置SV PLC 的通讯地址 01 通讯速度 设置计算机与 SV PLC 的通讯速率 9600 bps数据位 7 校验位设置计算机与 SV PLC 的通讯协议偶校验停止位 1模式设置计算机与SV PLC 的通讯模式ASCII ModeCANopenBuilder组态软件中的通信速度,数据位,校验位,停止位以及模式的选择须与PLC主机设置一致。
设置正确后,点击『确定』按钮,返回主界面。
4. 选择『网络(N)』菜单,点击『在线』指令。
如果与SV 主机的连接正常,则会出现如下图所示画面。
5.按“确定”按钮对CANopen网络进行扫描,正常情况下弹出扫描进度条,如下图所示。
当扫描出需要配置的主站和从站后,点击“OK”按钮。
6. 点击上图所示的“OK”按钮后,CANopen网络中主站和从站的图标都会显示在软件界面上,如下图所示。
Ø 主站参数设置选择『网络(N)』菜单,点击『主站参数』选项,弹出下图所示对话框。
工作模式:选择DVPCOPM-SL模块的工作模式,可选择Master Mode或Slave Mode,本例中为MasterMode 。
同步周期:当从站PDO传输类型为同步传输时,须在此设置同步周期。
本例PDO传输采用异步传输,故可不考虑此参数。
主站heartbeat时间:设定DVPCOPM-SL主站发送心跳报文的周期。
本例中设为200 ms。
设定参数值后,点击“确定”按钮。
Ø 从站设备参数设置1. 双击C2000变频器从站图标,跳出如下图所示对话框。
2. 配置PDO:添加PDO:在“EDS文件提供的PDO”一栏中选择某一PDO,双击该PDO或点击右侧的“添加”按钮,可将选择的PDO添加到“已配置的PDO”中。
删除PDO:在“已配置的PDO”一栏中,选择某一PDO,点击右侧的“删除”按钮,可将选择的PDO从“已配置的PDO”中删除。
PDO映射:在“已配置的PDO”一栏中,选择某一PDO,双击该PDO或点击右侧的“PDO映射”按钮,会弹出“PDO映射…”对话框。
如下图所示,从站设备的所有参数都显示在“EDS提供的参数”一栏内。
选择“EDS提供的参数”一栏中的某一参数,点击按钮可将该参数从“已映射的参数”一栏内删除。
“已映射的参数”一栏中最多可以添加8个字节长度的参数。
备注:C2000变频器只有20XX和21XX区域的地址可以进行PDO映射,其他参数不可以通过PDO映射,但可以通过SDO读写。
C2000变频器20XX区域的地址对应的索引为2020,21XX区域的地址对应的索引为2021。
PDO属性:在“已配置的PDO”一栏中,选择某一PDO,点击右侧的“属性”按钮,会弹出如下所示界面。
在此界面中可设置PDO的COB-ID以及传输类型,及采用异步传输时TxPDO的Event timer。
PDO COB-ID设置规则如下表所示:RXPDO编号COB-ID(HEX) TXPDO编号COB-ID(HEX) RXPDO1 200+从站站号TXPDO1 180+从站站号RXPDO2 300+从站站号TXPDO2 280+从站站号RXPDO3 400+从站站号TXPDO3 380+从站站号RXPDO4 500+从站站号TXPDO4 480+从站站号PDO传输模式说明如下表所示传输类型传输模式说明255 异步模式当RxPDO或TxPDO的数据发生变化时立即上传至总线,主站收到TxPDO的数据或从站收到RxPDO的数据后立即生效。
0 同步非周期对于RxPDO,数据发生变化时立即上传至总线,从站收到RXPDO的数据要等到收到下一个同步消息后有效。
对于TxPDO,数据发生变化时立即上传至总线,主站收到TxPDO数据后立即生效。
PDO传输模式为同步模式时,同步消息有CANOPEN主站周期发送。
1~240 同步周期以同步5为例,每5个同步消息后(同步1则是1个同步消息后),将RxPDO或TxPDO数据传输至总线。
对于RxPDO,从站收到RXPDO的数据要等到收到下一个同步消息后有效。
对于TxPDO,主站收到TxPDO数据后立即生效。
PDO传输模式为同步模式时,同步消息有CANOPEN主站周期发送。
3. 设置“错误控制协议”:在“节点配置”界面中点击“错误控制协议”,进入如下界面。
此范例中,选择Heartbeat 协议,“主站监控超时时间”设为200 ms ,“从站Heartbeat 产生时间”设为100ms 。
设定参数后,点击『确认』按钮后返回“节点配置…”对话框。
错误控制设定对话框中的参数含义见下表。
4. 此范例参数配置RxPDO1的映射参数如下图所示项目 说明备注Guard 时间主站按Guard Time 设定的时间间隔去轮询从站, Node GuardingLife Time Factor Life Time 因子,Life time= Guard time x LifeTime factor 。
如果从站在Life Time 时间内没有被主站轮询到,主站就认为该从站掉线。
当选择“Heartbeat ”后,就不能再选择“Node Guarding ”。
从站Heartbeat 产生时间从站按“从站Heartbeat 产生时间”周期发送Heartbeat 报文给主站。
Heartbeat主站监控超时时间如果主站在“主站监控超时时间”没有收到从站的Heartbeat 报文,主站就认为该从站掉线。
主站监控超时时间要大于从站Heartbeat 产生时间。
节点列表 CANOPEN 网络中配置的所有节点都显示在节点列表内。
无Heartbeat 监控配置此“错误控制设定”的节点可以监控“Heartbeat 监控”栏内配置的节点是否掉线。
“Heartbeat 监控”栏内只能配置一个节点。
'b3将选择的节点添加到“Heartbeat 监控”一栏内;无'b3将选择的节点从“Heartbeat 监控”一栏内删除。
无编辑按钮 选择“Heartbeat 监控”一栏内的某一节点,点击“编辑”按钮可以更改监控时间。
无确认按钮 点击“确认”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数被保存。
无 取消按钮点击“取消”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数无效。
无TxPDO1的映射参数如下图所示如下图所示,RxPDO1和TXPDO1的传输类型选择255(异步模式)。
5. 所有参数设置完成后,在“节点配置…”界面中点击“确定”。
Ø 节点列表配置1. 双击“DVPCOPM Master”图标,弹出如图所示的“节点列表配置”对话框。
可以看到左边的列表中有当前可用节点VFD-C Drives,右边有一个空的“节点列表”。
2. 选中VFD-C Drives 从站,点击“>”按钮将该从站加入节点列表。
在下方的输入输出映射表中看到从站的IO 数据对应到SV 主机内的D 寄存器地址。
如下图所示。
3. 确认无误后,点击『确定』按钮,然后将配置下载到DVPCOPM-SL 主站模块内。
下载时,如果 SV 主机处于RUN 模式,会弹出“警告”对话框,如下图所示。
4. 点击『是』按钮,将配置下载至主站模块,确认PLC 处于RUN 模式。
¢ 保存配置数据选择『文件(F )』菜单中『保存(S)』命令,将当前的网络配置保存。
¢ DVPCOPM-SL 主站模块和从站设备的 IO 数据映射 DVPCOPM-SL 主站模块 → C2000变频器DVPCOPM-SL 主站模块寄存器 CANOPEN 总线数据传输从站设备元件装置D6282H C2000变频器命令字高字节D6282LC2000变频器 C2000变频器命令字低字节D6283H C2000变频器频率字高字节D6283L C2000变频器频率字低字节C2000变频器→DVPCOPM-SL 主站模块DVPCOPM-SL主站模块寄存器CANOPEN总线数据传输从站设备元件装置D6032H C2000变频器状态字高字节D6032L C2000变频器状态字低字节D6033H C2000变频器输出频率字高字节D6033L。