ABB机器人外部启动配置说明
ABB机器人基本操作说明

ABB机器人基本操作说明一、ABB机器人的启动与关闭1.启动ABB机器人:首先确认机器人电源线和控制器电源线正常连接,然后按下控制器的电源开关启动机器人。
2.关闭ABB机器人:在终端上按下机器人控制器上的电源按钮,然后按照显示屏上的提示操作,直到机器人完全关闭。
二、ABB机器人的坐标系选择与校准1.选择坐标系:ABB机器人可以使用基座坐标系、工具坐标系和用户定义的坐标系。
根据具体任务的需要,选择合适的坐标系进行操作。
2.坐标系校准:在使用机器人前,需要进行坐标系校准以确保机器人的运动准确性和精度。
校准过程中需要使用专门的校准工具和仪器,按照校准操作指导进行校准。
三、ABB机器人的编程1. 打开编程界面:在FlexPendant终端上选择编程模式,并输入密码登录编程界面。
2.创建程序:在编程界面上创建一个新程序,设置程序的名称和编号。
3. 编写程序:使用ABB的编程语言RAPID(Robotics Programming Integrated Development Environment)进行程序编写。
RAPID是一种结构化编程语言,类似于传统的编程语言,可以使用变量、条件语句、循环语句等进行程序设计。
4.保存程序:在编程过程中,需要定期保存程序,以防止程序的意外丢失。
5.载入程序:将编写好的程序载入到机器人控制器中,并选择运行模式。
6.运行程序:在机器人控制器上选择程序,并选择运行方式,可以选择单步运行、连续运行等。
四、ABB机器人的示教示教是ABB机器人的一种操作方式,可以通过操作机器人的手臂进行示范,机器人会根据示教的运动轨迹执行任务。
以下是示教的基本操作步骤:1. 选择示教模式:在FlexPendant终端上选择示教模式,并输入密码登录示教界面。
2.示教类型选择:根据具体任务需要选择示教的类型,包括点到点示教、路径示教和力控示教等。
3.示教开始:点击示教按钮,开始示教。
根据终端上的指示,手动移动机器人的手臂,示教机器人运动的轨迹。
ABB机器人基本操作说明

ABB机器人基本操作说明
一、ABB机器人基本操作
1、启动:
(1)打开机器人控制盒上的开关;
(2)插入机器人辅助电源,在“电源”按钮上按下“ON”开机按钮;
(3)根据机器人控制盒上的指示灯,确认机器人启动成功。
2、初始化:
(1)调整机器人安装贴附在机器人内部的角度传感器,保持机器人
传感器绝对水平;
(2)检查机器人的机械接口,确保接口的安全可靠;
(3)将机器人绝对位置,特殊地,两臂末端的高度保持在一定范围,其中安装精度为±0.01mm,水平安装精度为±0.02mm,垂直安装精度为
±0.03mm;
(4)调整机器人安装贴附在机器人外部的机械接口,保持机器人外
部配件的紧固程度;
(5)连接机器人的主电源线,确保电源线的安全可靠;
(6)在机器人控制盒上按下“ON”按钮,启动机器人;
(7)运行机器人的自检程序,确定机器人的功能正常;
(8)根据机器人控制盒上的指示灯,确定机器人初始化成功。
3、编程:
(1)调出机器人控制软件的编程环境,连接好机器人和计算机;
(2)选择机器人所需要的编程语言,比如RobotWare,RAPID,甚至是统一机器人语言;
(3)输入机器人程序。
ABB工业机器人系统基本操作

ABB工业机器人系统基本操作一、启动机器人系统:1.按下机器人后面的电源按钮,机器人控制器将开始启动。
2.控制器启动后,显示器上将显示控制器的初始屏幕,输入密码并按下确认键。
3.控制器连接上时,按下“启动/停止”按钮,激活机器人。
二、设置工具:1.在机器人控制器的菜单中,找到“工具”选项。
2.进入“工具”选项后,可以选择现有的工具或添加新的工具。
3.设置完工具后,保存设置。
三、设置工件:1.在机器人控制器的菜单中,找到“工件”选项。
2.进入“工件”选项后,可以选择现有的工件或添加新的工件。
3.设置完工件后,保存设置。
四、创建程序:1.在机器人控制器的菜单中,找到“程序”选项。
2.进入“程序”选项后,选择“新建程序”。
3.在程序中添加所需的任务和指令,并保存程序。
五、运行程序:1.在机器人控制器的菜单中,找到“运行”选项。
2.进入“运行”选项后,选择要运行的程序。
3.根据需要选择执行方式,可以选择单步、连续、循环等执行模式。
4.按下“开始”按钮,机器人将开始执行程序。
六、监控机器人运行:1.在机器人控制器的菜单中,找到“监控”选项。
2.进入“监控”选项后,可以查看机器人的运行状态和参数。
3.可以通过监控界面对机器人的运行进行控制和调整。
七、停止机器人:1.在机器人控制器的菜单中,找到“停止”选项。
2.进入“停止”选项后,选择停止所有程序或停止当前程序。
3.按下“停止”按钮,机器人将停止运行。
八、关机机器人系统:1.在机器人控制器的菜单中,找到“关机”选项。
2.进入“关机”选项后,选择关机方式。
3.按下“确认”按钮,机器人控制器将开始关机。
本文中提到的是ABB工业机器人系统的基本操作方法,操作的具体步骤可能会因机器人型号和系统版本的不同而略有差异。
建议初次操作时,参考机器人操作手册或向ABB工作人员寻求帮助。
同时,注意在操作机器人时要遵守相关的安全规定,确保操作的安全性。
ABB机器人操作手册 中文版
ABB机器人操作手册中文版ABB机器人操作手册一、引言机器人操作手册是为了帮助操作员正确使用ABB机器人并充分发挥其功能而编写的。
本手册详细介绍了ABB机器人的基本操作流程、安全注意事项以及常见故障排查方法。
通过仔细阅读和理解本手册,您将能够熟练操作ABB机器人,确保工作的高效性和安全性。
二、机器人基本操作流程1. 启动机器人1.1 检查电源和电气连接是否正常1.2 打开机器人控制器电源开关1.3 按下启动按钮,等待机器人系统启动完成2. 安全操作2.1 穿戴正确的个人防护装备2.2 确保工作区域清洁整洁,无杂物和障碍物2.3 确保操作环境良好,并避免机器人在危险区域工作3. 机器人操作3.1 了解机器人的基本结构和组件3.2 使用机器人控制器进行精确的运动控制3.3 学习编程语言和指令,以实现各种自动化任务3.4 掌握机器人的手动操作和远程控制方法4. 故障排查和维护4.1 快速识别和解决常见的机器人故障问题4.2 定期检查机器人的机械结构和电气系统4.3 做好机器人的日常维护工作,保持其正常运行状态三、安全注意事项1. 操作员必须接受专业的培训和认证,熟悉机器人的工作原理和操作流程。
2. 操作员必须遵守机器人的操作规范和相关法律法规,确保自身安全和设备安全。
3. 在机器人工作期间,任何人员都不得进入工作区域,以免发生意外。
4. 在机器人操作过程中,严禁随意更改或调整机器人的参数和程序,以免引发故障或事故。
5. 在机器人运行前,必须对机器人及其周围的工作区域进行安全检查,确保无隐患。
四、常见故障排查方法1. 机器人无法启动1.1 检查机器人控制器的电源连接是否正常1.2 检查机器人控制器的开关和按钮是否正确设置和操作2. 机器人无法动作2.1 检查机器人的运动控制面板是否处于正确的模式和状态2.2 检查机器人周围是否有障碍物或阻碍其运动的物体3. 机器人运动异常3.1 检查机器人的传感器和执行器是否正常工作3.2 检查机器人的运动路径和轨迹是否正确五、结语本操作手册旨在帮助操作员更好地理解和使用ABB机器人,并在工作中提高效率和安全性。
ABB机器人外部启动配置说明书

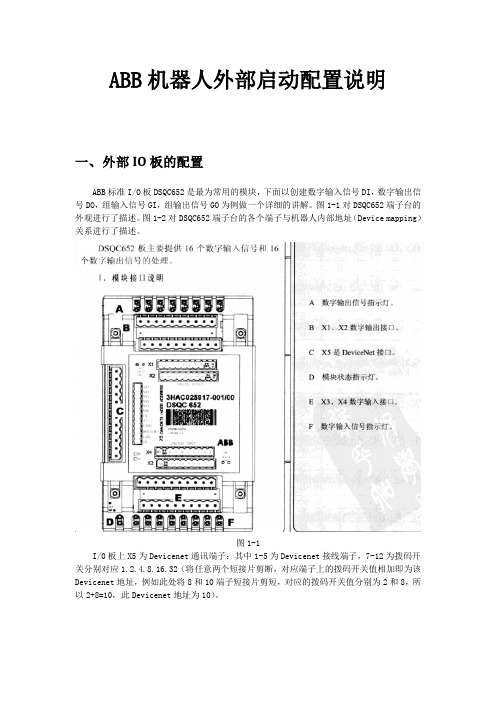
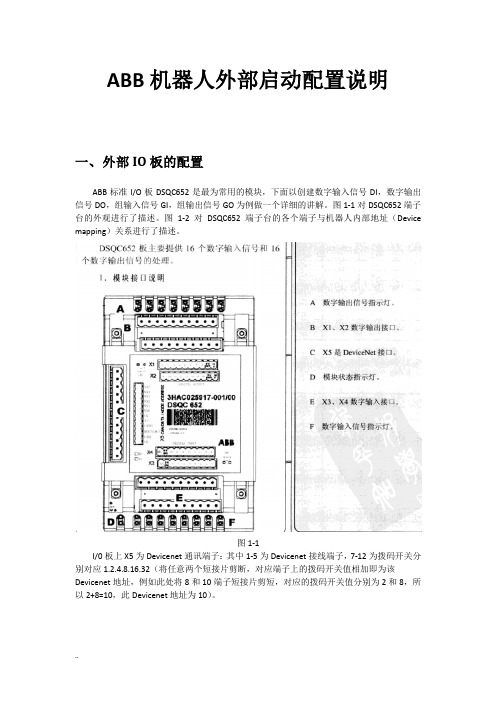
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人外部启动配置说明

Digital Input
设定信号的类型
Assigned to Device
DSQC 652 24 VDC I/O Device 设定信号所在的 IO 模块
Device Mapping
1
设定信号所占用的地址
Invert Physical Value
NO
如果想将信号取反,可选 Yes
图 1-2-1 按照表 1-2-1 设定,设定完毕后如图 1-2-2 所示,单击【确定】,提示“重启”选择【就 是】,完成数字输入信号 DI1 的创建。
Digital Output
设定信号的类型
Assigned to Device
DSQC 652 24 VDC I/O Device 设定信号所在的 IO 模块
Device Mapping
1
设定信号所占用的地址
Invert Physical Value
NO
如果想将信号取反,可选 Yes
按照表 1-3-1 设定,设定完毕后如图 1-3-1 所示,单击【确定】,提示“重启”选择【就
ABB 机器人外部启动配置说明
图 1-2-2
3、创建数字输出信号 DO1
单击【ABB 菜单】【控制面板】【配置】【Signal】【添加】显示图 1-2-1 所示 的界面,数字输出信号 DO1 相关参数说明见表 1-3-1
表 1-3-1
参数名称
设定值
说明
Name
DO1
设定数字输出信号的名字
Type of Signal
表 1-1-1
参数名称
设定值
说明
Name
d652
设定 IO 板在系统中的名字
Address
10
ABB机器人操作手册

ABB机器人操作手册ABB机器人是一款高精度、高效率、高灵活性的工业机器人,它在汽车、电子、铝化、机械制造等领域广泛应用,为工厂带来了巨大的效益。
然而,对于初次接触ABB机器人的人来说,熟悉机器人的操作方法往往是一个难点。
因此,本文将介绍ABB机器人的基本操作手册,帮助用户能够轻松掌握ABB机器人的使用方法。
一. 基本配置介绍1. Robot Studio软件Robot Studio是ABB机器人的专业化编程软件,主要用于机器人程序的编制、仿真和优化。
用户可以通过它来设置机器人参数、选择运动轨迹、设定逻辑控制等等。
2. FlexPendant控制器FlexPendant控制器是ABB机器人的控制终端,它采用人机交互的界面,方便用户操作并显示机器人运行状态。
在使用机器人时,用户将程序上传到控制器,并通过它来控制机器人的运动。
3. RobotWare系统RobotWare是ABB机器人的操作系统,它可以管理机器人的各种硬件设备、控制运动和实现安全保护等功能。
同时,RobotWare 还包含了许多应用程序,为用户提供了丰富的功能和定制化的工具。
二. 机器人操作流程1. 机器人的启动启动机器人前,需要检查机器人的电源、外部硬件设备是否正常工作。
接着按下FlexPendant控制器上的用户开关,并选择机器人的操作模式,等待机器人启动。
启动时,机器人需要进行自检和安全检测,如果机器人出现故障或者不满足条件,会提示用户相应的错误信息,让用户进行处理。
2. 机器人程序的上传机器人程序是机器人进行动作的指令集,通常通过Robot Studio进行编写。
在机器人启动后,需要将编写好的机器人程序上传到FlexPendant控制器中。
上传时需要注意上传方式和文件格式,确保机器人程序能够在控制器中顺利运行。
3. 机器人操作方式的选择机器人有多种操作方式,包括手动模式、编程模式和自动模式等。
在进行机器人操作之前,需要根据实际需求选择相应的操作方式。
实用文档之ABB机器人外部启动配置说明

实用文档之"ABB机器人外部启动配置说明"一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1参数名称设定值说明Name d652 设定IO板在系统中的名字Address 10 设定IO板在总线中的地址选择DeviceNet设备来自模板的值DSQC 652 24 VDC I/ODevice单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1参数名称设定值说明Name DI1 设定数字输入信号的名字Type of Signal Digital Input 设定信号的类型Assigned to Device DSQC 652 24 VDC I/O设定信号所在的IO模块DeviceDevice Mapping 1 设定信号所占用的地址Invert Physical Value NO 如果想将信号取反,可选Yes图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人外部启动配置说明
ABB外部启动配置说明ABB外部启动配置说明1:引言本文档旨在提供ABB外部启动的详细配置说明,帮助用户正确配置系统以实现的成功启动。
本文档适用于以下型号:[型号/系列]。
2:系统要求在开始配置外部启动之前,请确保满足以下系统要求:2.1 硬件要求- ABB [型号]。
- 适配的控制器 [控制器型号]。
- 外部输入设备(如按钮、开关等)。
2.2 程序要求- 安装ABB程序 [程序名称]。
- 设定程序的启动方式为外部启动。
3:外部启动配置步骤按照以下步骤配置ABB的外部启动:3.1 连接外部输入设备将外部输入设备(如按钮、开关等)与控制器进行连接。
确保连接正确,且信号可靠传输。
3.2 配置输入信号在控制器的设置界面中,进入输入信号配置界面。
根据外部输入设备的类型和数量,逐一配置输入信号,并为每个输入信号分配一个唯一的名称。
3.3 配置启动逻辑在程序中,设置启动逻辑以响应外部输入信号。
根据实际需求,配置何时启动、何时停止、何时切换运行模式等。
3.4 测试启动配置在配置完成后,进行测试以确保配置正确。
按下外部输入设备触发启动信号,观察的响应。
如果按照预期进行启动、停止或模式切换,则配置成功。
4:附件本文档不涉及具体附件。
5:法律名词及注释5.1 外部启动外部启动是指通过外部输入设备触发的启动、停止或模式切换等动作的一种方式。
5.2 ABBABB指瑞士ABB公司生产的工业产品。
5.3 控制器控制器是指用于控制动作和运行的设备,通常由软件和硬件组成。
6:结束语本文档提供了ABB外部启动的详细配置说明。
通过按照文档中的步骤进行配置,用户可以成功启动并控制。
如有任何疑问,请联系ABB技术支持。
ABB机器人的设置
ABB机器人的设置一、机器人配电柜需要接线。
紧凑型配电柜需要我们短接IO板的电源。
短接方法为:XS10的1号端子和4号端子短接,XS10的2号端子和3号端子和5号端子短接。
其中1号端子为24V+,2号端子为0V。
外面我们需要用机器人电源时,直接接到XS10的1号和2号端子上。
二、更新转数计数器。
顺序为4-5-6-1-2-3 选择校准,单击”ROB_1”,选择校准参数,选择编辑电动机校准偏移,将机器人本体上电动机校准偏移记录下来,单击确定更改校准偏移值,在编辑电动机校准偏移中输入机器人本体上的电动机校准偏移数据,然后确认,输入新的校准偏移值后重新启动示教器(如果示教器中显示的数值与机器人本体上的数值一致则无需修改,直接单击取消)。
重启后在校准中选择更新转数计数器,单击确认,单击全选并更新。
三、机器人IO输入输出。
ABB机器人的输入和输出全部为高电平(即24V+)。
四、机器人示教器的基本操作。
(一)手动操作更改模式为:1,点击左上角ABB图标。
2,手动操纵。
3,动作模式。
4,选中某个轴。
(二)如果是按照自己建立的工件坐标运行则有三个参数需要更改:1动作模式更改为:线性。
2,坐标系更改为:工件坐标。
3,工件坐标更改为:您自己所建立的坐标。
这样就可以按照自己建立的工件坐标。
五、IO点的建立。
(一)机器人内部IO点的建立。
一般情况,ABB机器人到货之后,ABB公司会帮甲方建立好系统,包括内部IO点的建立。
所以在这里我粗略的讲讲怎么建立。
1.单击左上角ABB图标,进入控制面板,选择配置。
2.双击UNIT,进入之后点击“添加”。
名字设置为BOARD10。
Type of Unit的值更改为D652-Lean。
Connected to bus的值更改DeviceNet--Lean。
最后面一行的DeviceNe Lean ADDress设置为10,单击确定,目前不用重启,再单击后退。
这个是设置我们所要用的IO板的参数。
ABB机器人【配置设定】大全,人手一份,建议永久收藏!

ABB机器人【配置设定】大全,人手一份,建议永久收藏!1、机器人需要有888-2或者888-3选项(使用控制器网口),或者840-3选项(使用Anybus网口)2、此处举例888选项3、机器人控制器有如下网口,其中:X2 是服务端口,ip固定192.168.125.1X3连接了示教器X7连接了安全板X9连接了轴计算机4、Profinet可以连接WAN口或者LAN3口,根据设置连接5、此处举例连接WAN口6、控制面板,配置,主题选择communication7、进入IPSETTING8、点击ProfinetNetwork9、修改ip并选择对应网口10、重启11、控制面板,配置,主题I/O ,PROFINET InternalDevice12、配置输入输出字节数。
和PLC那边设置一致13、配置界面下,进入Industry Network,PROFINET14、设置station名字,这个名字要和PLC端对机器人的station 设置一样15、添加signal,device选择profinetInternal device2二、ABB机器人IO接线与配置1、以DSQC652为例(16进16出)2、上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来3、下部区域为16个输入点,9号针脚的0v需要从XT31引过来4、左侧区域短接片为地址位,默认为10,如下图(剪掉的为1,留下的是0,高电平有效)。
如果要修改板卡地址,在这里修改,机器人里也要做对应配置5、6、控制面板,配置,找到devicenetdevice,添加(如果已经显示添加,则不需要再添加)7、模板选择652,地址根据前面短接片设置,默认为108、确定后,暂时不重启,全部配置完再一起重启9、进入Signal,点击添加10、举例,一个输出设置如下设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。
ABB 机器人系统重启说明

ABB 系统重启说明ABB 系统重启说明1:系统重启前准备1.1 确保所有处于安全状态,停止运行并断开电源。
1.2 确保所有外部设备与系统已断开连接。
1.3 检查系统的所有电源和电缆连接是否牢固。
2:系统重启步骤2.1 开启主机电源,等待系统启动。
2.2 登录ABB 系统的控制界面。
2.3 检查主机和附属设备的连接状态,确保所有设备均正常连接。
2.4 检查所有的电源和电缆连接,确保正常。
2.5 启动系统,并等待系统完全启动。
3:系统初始化和校准3.1 进入控制界面的初始化设置。
3.2 运行系统初始化程序,校准各个的坐标系和动作能力。
3.3 检查校准结果,并进行必要的调整。
4:外部设备连接4.1 逐个连接外部设备,确保每个设备的连接正常。
4.2 进行外部设备的初始化设置,并确保外部设备能够正常与系统通信。
5:系统功能测试5.1 运行简单的程序,测试的基本功能。
5.2 运行复杂的程序,测试的高级功能和性能。
5.3 检查的运行结果,确保其与预期一致。
6:文档和备份6.1 编写系统重启过程的详细文档,包括步骤、配置和设置。
6.2 备份系统的配置文件和程序,以防数据丢失或系统故障。
7:系统重启完成7.1 测试所有和外部设备的联动工作。
7.2 确认系统能够正常运行,并满足设定的要求。
7.3 完成系统重启后,将文档和备份文件妥善保存。
附件:1:系统重启说明附件1:系统连接图。
2:系统重启说明附件2:外部设备连接标识表。
法律名词及注释:1:系统:包括设备、控制系统和附属设备的组合。
2:初始化:对系统进行初始设置,使其能够正常运行。
3:校准:调整的坐标系和动作能力,以保证其准确性和稳定性。
4:外部设备:指与系统进行联动的其他设备。
5:功能测试:通过运行程序,测试系统的功能和性能。
A机器人外部启动配置说明
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1参数名称设定值说明Name d652 设定IO板在系统中的名字Address 10 设定IO板在总线中的地址来自模板的值DSQC 652 24 VDC I/O Device 选择DeviceNet设备单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1参数名称设定值说明Name DI1 设定数字输入信号的名字Type of Signal Digital Input 设定信号的类型Assigned to Device DSQC 652 24 VDC I/O Device 设定信号所在的IO模块Device Mapping 1 设定信号所占用的地址Invert Physical Value NO 如果想将信号取反,可选Yes图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人外部启动配置说明

ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人外部启动配置说明

A B B机器人外部启动配置说明IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】A B B机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Devicemapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1表1-1-1单击【ABB菜单】【控制面板】【配置】【DeviceNetDevice】【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC65224VDCI/ODevice”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】【控制面板】【配置】【Signal】【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
图1-2-23、创建数字输出信号DO1单击【ABB菜单】【控制面板】【配置】【Signal】【添加】显示图1-2-1所示的界面,数字输出信号DO1相关参数说明见表1-3-1表1-3-1按照表1-3-1设定,设定完毕后如图1-3-1所示,单击【确定】,提示“重启”选择【是】,完成数字输出信号DO1的创建。
ABB机器人外部启动配置说明
Invert Physical Value
NO
如果想将信号取反,可选 Yes
按照表 1-5-1 设定,设定完毕后如图 1-5-1 所示,单击【确定】,提示“重启”选择【是】,
完成组输出信号 GO1 的创建。
..
图 1-5-1 组输入与组输出遵循以下格式:
注意:组输入和组输出可以定义起始位,可以隔位,各个位的顺序和设置的一致,如 1,5-3,7 和 1,3-5,7 是不一样的。
Action
Motor on
设定输入信号 IN1 有效时的动作
图 1-6-1 按照表 1-6-1 设定,设定完毕后如图 1-6-2 所示,单击【确定】,提示“重启”选择【是】,
完成输入信号与系统变量的关联。
..
图 1-6-2 依照此方法将 IN2 信号关联到“START”。“Motor on” 、“START”配置完成,机器人 便可外部启动。
表 1-3-1
参数名称
设定值
说明
Name
DO1
设定数字输出信号的名字
Type of Signal
Digital Output
设定信号的类型
Assigned to Device
DSQC 652 24 VDC I/O Device 设定信号所在的 IO 模块
Device Mapping
1
设定信号所占用的地址
Invert Physical Value
NO
如果想将信号取反,可选 Yes
按照表 1-3-1 设定,设定完毕后如图 1-3-1 所示,单击【确定】,提示“重启”选择
【是】,完成数字输出信号 DO1 的创建。
..
图 1-3-1
4、创建组输入信号 GI1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB机器人外部启动配置说明
一、外部IO板的配置
ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1
I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-2
1、定义DSQC652板的总线连接
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1
单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面
图1-1-1
单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示
图1-1-2
点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示
图1-1-3
2、创建数字输入信号DI1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1
表1-2-1
图1-2-1
按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
图1-2-2
3、创建数字输出信号DO1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输出信号DO1相关参数说明见表1-3-1
表1-3-1
按照表1-3-1设定,设定完毕后如图1-3-1所示,单击【确定】,提示“重启”选择【是】,完成数字输出信号DO1的创建。
图1-3-1
4、创建组输入信号GI1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,组输入信号GI1相关参数说明见表1-4-1
表1-4-1
按照表1-4-1设定,设定完毕后如图1-4-1所示,单击【确定】,提示“重启”选择【是】,完成组输入信号GI1的创建。
图1-4-1
5、创建组输出信号GO1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,组输入信号GO1相关参数说明见表1-5-1
表1-5-1
按照表1-5-1设定,设定完毕后如图1-5-1所示,单击【确定】,提示“重启”选择【是】,完成组输出信号GO1的创建。
图1-5-1
组输入与组输出遵循以下格式:
注意:组输入和组输出可以定义起始位,可以隔位,各个位的顺序和设置的一致,如1,5-3,7和1,3-5,7是不一样的。
6、关联外部IO信号与系统变量
此处以输入信号为例,将IN1信号关联到“Motor on”,单击【ABB菜单】→【控制面板】→【配置】→【System Input】→【添加】显示图1-6-1所示的界面,相关参数说明见表1-6-1
图1-6-1
按照表1-6-1设定,设定完毕后如图1-6-2所示,单击【确定】,提示“重启”选择【是】,
完成输入信号与系统变量的关联。
图1-6-2
依照此方法将IN2信号关联到“START”。
“Motor on”、“START”配置完成,机器人便可外部启动。
二、利用608-1 world zone软件包设置待机位置和干涉区
待机位置的输出端必须设置成只读模式(ReadOnly)。
world zone监控的是当前TCP的坐标值。
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】,其他参数名称设置参照“创建数字输出信号DO1”,Access Level设置参照如图2-1-1所示
图2-1-1
创建如图2-1-2所示的程序,程序名为POWER_UP(此程序要在Event Route中调用)。
单击【ABB菜单】→【控制面板】→【配置】→【主题】→【Controller】,显示如图2-1-3所示的界面,单击Event Route,按图2-1-4所示要求填写,单击【确定】,提示“重启”选择【是】。
设置完毕后。
机器人在开机后都会调用一次POWER_UP程序,告诉机器人干涉区或者机器人的待机位置,如果在设定的范围内,便会输出。
图2-1-2
图2-1-3
图2-1-4 三、M AIN程序的编辑
详见附件
四、程序和IO配置的导出与导入
程序文件和IO配置可以导出到USB设备,需要指出的是:路径中不能包含中文
程序文件的导出与导入见下图:
IO 配置的导出与导入见下图:
导入
导出
导入导出。