中级课程03 海龟机器人
什么是“仿生学”,它如何利用自然界的设计原理改进技术?

什么是“仿生学”,它如何利用自然界的设计原理改进技术?随着现代科学技术的不断发展,人们越来越关注从自然界中寻找灵感来改进技术。
仿生学就是一种借鉴自然界中生物体的设计原理,将其用于工业、医学等领域的学科。
那么,什么是“仿生学”,它如何利用自然界的设计原理改进技术?下面我们来一探究竟。
一、什么是“仿生学”“仿生学”这个词汇来源于希腊语,意为“类似生命体的学问”。
作为一门新兴的跨学科研究领域,它结合了生物学、科学、工程学、计算机学等多个领域的知识,旨在学习生物体的结构和生命活动的方式,并在工程领域中应用这些原理。
在仿生学的研究中,科学家们会通过模仿自然界生物的骨架、肌肉、纤维、纹路等结构,探究它们发挥功能的原理,并将这些原理应用于机器人、医学、交通运输等领域。
二、仿生学应用案例1.仿生机器人仿生机器人是仿生学研究中的一个重要分支,它致力于在机器人设计中应用仿生学原理,模仿自然界中的生物运动、感觉和认知系统,使机器人的操作更加精细和适应环境。
比如,海龟机器人就是一种典型的仿生机器人,它的设计灵感来源于海龟的骨骼结构和游泳方式。
这种机器人可以在水下进行探索,具有较高的灵活性和稳定性。
2.仿生材料仿生材料是将仿生学原理应用到材料科学领域的一种技术,旨在研究和开发具有自愈性、可生长性、智能功能等特点的新型材料,以应对复杂的环境变化。
比如,仿生胶水就是一种仿生材料,其灵感来源于蚂蚁粘合物,可以在水下黏合物体,并具有较高的可靠性和耐久性。
3.仿生交通运输仿生交通运输就是将自然界中的有机体运动方式应用到交通工具设计中,以减少能量消耗和环境污染。
比如,高速列车的头部设计就是仿生交通技术的典型之一,其外形呈锥形,仿照了雄鹰的翅膀和鼻部特征,可以减少风阻和能耗。
三、总结仿生学在现代科技领域中占据着越来越重要的地位,它不仅能促进技术的升级和发展,更可以促进人与自然的和谐相处。
尽管仿生学的研究还有许多待探究的领域,但相信在未来,仿生学将会在各行各业中发挥越来越重要的作用。
影响世界的编程小海龟
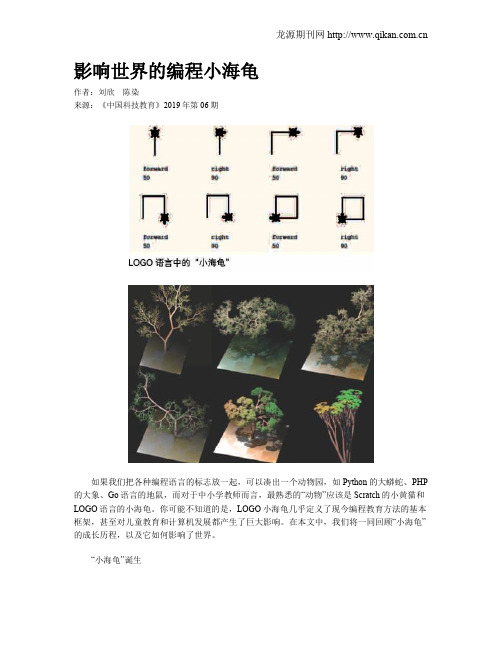
影响世界的编程小海龟作者:刘欣陈染来源:《中国科技教育》2019年第06期如果我们把各种编程语言的标志放一起,可以凑出一个动物园,如Python的大蟒蛇、PHP 的大象、Go语言的地鼠,而对于中小学教师而言,最熟悉的“动物”应该是Scratch的小黄猫和LOGO语言的小海龟。
你可能不知道的是,LOGO小海龟几乎定义了现今编程教育方法的基本框架,甚至对儿童教育和计算机发展都产生了巨大影响。
在本文中,我们将一同回顾“小海龟”的成长历程,以及它如何影响了世界。
“小海龟”诞生我们今天提到的“小海龟”,是指美国麻省理工学院教授西摩尔·派普特的LOGO语言和其中的绘图小海龟。
派普特在威特沃特斯兰德大学和剑桥大学获得了2个数学博士学位。
在攻读第2个数学博士期间,派普特结识了影响他一生的人物让·皮亚杰。
皮亚杰被公认为是仅次于弗洛伊德的心理学“巨人”,他创建的认知发展理论颠覆了人们原本对儿童发展的理解。
在此之前,儿童的玩耍一直被认为是无关紧要的行为,皮亚杰则认为玩耍对儿童的知识建构起到了重要的作用。
在皮亚杰的影响下,派普特来到日内瓦大学,花了4年时间,与皮亚杰共同开展数学与儿童教育的砑究工作。
派普特认为:“当代文化中常见的数学恐惧症让很多人看不到数学知识的真面。
一方面,他们对自己所认为的‘数学’敬而远之;另一方面,尽管他们在數学知识上没有什么困难,但却不认为那就是数学。
”[1]吸收了皮亚杰的认知发展理论,派普特希望找到一种学习方法,既能与数学知识相关联,又能让儿童以他们的认知方式理解。
海龟型机器人是派普特最先找到的一个人手点。
1963年,派普特加入麻省理工学院,与著名人工智能科学家马文·明斯基共同研究人工智能。
同时,派普特也在研究如何借助计算机辅助儿童学习。
在派普特的带领下,LOGO语言和绘图小海龟机器人先后诞生。
在20世纪40年代,神经生理学家沃尔特设计了一批机器人,以《爱丽丝漫游仙境》中的海龟老师命名,通过让这些机器人模拟动物行为进行大脑运行模式的研究。
爬行乌龟机器人基础教学PPT课件

能够爬行的爪子,用两个马达控制 结构:身体 + 头部 + 爬行的爪子 身体:马达连接、与控制器连接要牢固
头部:主要是超声波传感器,用连杆以及 其他零件将其头伸出身体。
爬行的爪子:能够有阻力使其往前爬行, 可以用小轮胎作为爪子。
程序编写
乌龟能够爬行,两个马达控制爪子。运行 时交替进行,才能像乌龟一样爬行。遇到 “鱼”时,加速前进。没遇到“鱼”时, 缓慢爬行
爬行乌龟
教学目标 1、超声波传感器的编程与使用。 2、声音传感器的编程与编写。 3、多任务程序的编写。 难点 1、设计搭建,使乌龟更形象逼真的爬行。 2、超声波距离探测,避开障碍物。 时间安排 本次项目为两个课时,时长90分钟。
都见过乌龟吧?乌龟是怎样爬行的?
设计搭建一个乌龟机器人,能够像真的乌龟一样爬 行,并且能够避开障碍物。
在程序中添加什么模块可以让乌龟在执 行不同的爬行动作时输出不同的图像
Байду номын сангаас
1.乌龟看到不喜欢吃的鱼会怎样? 2.乌龟可不可以自己找鱼吃?
向爸爸妈妈做个展示吧!他们或许 有更好的主意喔!
人教版信息技术六上第课《让海龟画图》ppt课件

抬笔命令
格式:PU 功能:命令小海龟抬起龟笔,小海龟 再移动时就不会留下痕迹(画线)了。
落笔命令
格式:PD 功能:命令小海龟落下龟笔,这样 小Байду номын сангаас龟移动时又可以画图了。
任务二
请同学们指挥小海龟画出一大 一小两个正方形,并且让小正方形 处在大正方形中,也就要画出一个 “回”字形图形 。
回家命令格式
人教新课标五年级信息技术
让海龟画图
教学目标
1. 熟悉PU、PD、HT、ST、HOME 等基本绘图命令,运用这些基本绘图 命令绘制出简单图形。
2. 熟悉SS、FS、TS命令的功能和用 法。
3. 感受信息技术对生活与学习的作 用,产生学习的兴趣和积极性。
复习
任务一:
请同学们启动Logo系统,指挥 小海龟走出一大一小两个正方形。
格式:HOME 功能:使小海龟回到母位,并且头 朝上。
任务三
不管你们电脑上的小海龟在什么 位置,现在让可爱的小海龟画出当前 所处位置与母位之间的直线,并观察 一下现在图形如何了。
笔擦命令格式
格式:PE 功能:命令小海龟变成笔擦,擦除 它经过的线。
任务四
画出以下图形后,将小海龟隐藏起来。
小结
本节课我们主要学习了抬笔、 落笔、笔擦以及回家等基本绘图命 令。如果能灵活运用这些基本绘图 命令可以绘制出很多简单图形。
小学《人工智能编程》第23讲 会画画的海龟

1.2 画布
画布的默认大小
➢ 不对画布作初始设置,表示采用默认的画布大小和位置。 ➢ 设置画布是,相应参数为空,也表示采用默认的画布设置。
例如:画布的默认大小为(400,300),默认位于屏幕中心。
1.3 绘图坐标系
画布坐标系
海龟作图的坐标系和数学中的平面直角坐标系一样, 初始点为(0, 0),处于画布正中间。画布上的画 图过程中,运动中画笔的坐标参考图中以x轴与y轴 为指向的平面直角坐标系。
Python编程时,通过import turtle方法导入turtle库,就可以在程序 中使用海龟作图功能。
1.2 画布
画布是turtle中用于绘图的工作区域,绘图前需要设置画布初始位置和区域大小。
使用turtle.screensize(canvwidth=None,canvheight=None,bg=None)方法设置画布大 小,参数canvwidth表示画布的宽(单位为像素),参数canvheight表示画布的高, 参数bg表示画布的背景颜色。 例:turtle.screensize(800,600,"green")#表示设置画布大小为 ( 800,600)像素区域,背景为绿色。
Python程序示例
程序运行结果如图
1.6 海龟绘图初步
绘制一个长方形
海龟绘图就是指挥海龟前进、转向,海龟移动的轨迹就是绘制的线条。绘制一个长方形, 只需海龟前进、右转90度,反复4次。
调用width()函数可以设置笔刷宽度,调用pencolor()函数可以设置颜色。绘图完成后, 调用done()函数,让窗口进入消息循环,等待被关闭。否则,由于Python进程会立刻 结束,将导致窗口被立刻关闭。
3. 思维拓展
让海龟动起来说课

动让LOGO的小海龟起来说课宁夏吴忠市盛元小学马力LOGO基础知识说课流程2.学情分析3.教学目标4.教学重难点5.教学策略21.教材分析6.教学过程初识LOGO小海龟作图的新方法多才多艺的小海龟小海龟大智慧本节内容是该单元的起始课,起到一个引领作用让LOGO 的小海龟动起来让小海龟画的画有色彩命令格式作用前进(forword)FD 步长(前进的距离)小海龟按当前的方向前进指定的距离,并画出线段后退(back)BK 步长(后退的距离)小海龟按当前的方向前进指定的距离,并画出线段左转(left)LT 度数(转过的角度)小海龟向左旋转指定的度数右转(right)RT 度数(转过的角度)小海龟向右旋转指定的度数知识与技能情感态度与价值观过程与方法了解、掌握•熟悉LOGO语言的命令格式。
•掌握“前进、后退、右转、左转,清屏”命令写法并能正确运用;理解运动参数“步长”的含义,知道“步长”可以用算式表示。
任务驱动、分析操作•经历LOGO语言命令格式及基本动作命令学习和运用,在编程控制小海龟完成实际任务的过程中,初步掌握LOGO语言编写简单程序的方法。
习惯、态度养成•体验编写程序解决问题的便捷,初步感受计算机语言与自然语言不同表达特点,激发学习计算机程序的兴趣三维目标封面评价交流问题解决协作学习分析操作让LOGO的小海龟动起来封面神奇的心理测试,导入课题12345看图猜成语程序,自主探究问题购书赠券问题,综合实践锤子剪刀布游戏,训练思维价格竞猜,知识拓展7小结归纳,加深理解情景导入讲解命令合作学习小组交流拓展提高知识探究价格竞猜,知识拓展8评价交流6巩固练习视频游戏分析体验真人游戏一学生扮演机器人,另一学生用命令指挥他完成任务。
以被指挥的同学正面为基准,进行运动,引出本节内容。
初步体验程序控制的过程。
机器人视频•讲解LOGO语言的命令格式及FD,BK,LT,RT四个动作命令。
运动轨迹,执行的结果命令FD100•先让学生一起分析小海龟行动方向和轨迹从而知道要让我们干什么,然后尝试完成,掌握程序控制过程及步骤。
爱普生机器人中级培训资料

汇报人: 202X-01-04
目 录
• 爱普生机器人简介 • 机器人编程与控制 • 机器人应用案例分析 • 机器人维护与保养 • 安全操作规范
01 爱普生机器人简介
产品特点
01
02
03
04
高精度
爱普生机器人的重复定位精度 高,能够满足高精度作业需求
。
高速度
爱普生机器人的最大速度高, 能够快速完成作业,提高生产
控制器与通讯
控制器
了解爱普生机器人的控制器类型和性 能参数,如CPU、内存、存储等。
通讯协议
掌握爱普生机器人支持的通讯协议, 如EtherCAT、Modbus等,以及如何 配置和使用这些协议进行机器人控制 。
运动控制与轨迹规划
运动控制算法
了解并掌握基本的运动控制算法,如PID控制、轨迹规划等。
轨迹规划
装配作业
通过高精度的定位和抓取系统,爱普生机器人能够快速、 准确地完成各种零部件的装配作业,降低了人工操作误差 和生产成本。
焊接作业
爱普生机器人配备有专业的焊接工具和设备,能够进行各 种形状和规格的焊接作业,如直线焊、圆弧焊等,提高了 焊接质量和效率。
案例分析
某航空制造企业采用爱普生机器人进行飞机零部件的焊接 和装配作业,提高了生产效率和产品质量,减少了人工干 预和成本。
润滑与紧固
对机器人关节和运动部件 进行润滑,并检查紧固件 是否松动。
故障诊断与排除
故障识别
通过机器人异常声音、震 动或错误代码等迹象,判 断故障类型。
故障定位
使用诊断工具和程序,确 定故障发生的位置和原因 。
故障排除
根据故障定位结果,采取 相应的措施进行修复或更 换部件。
四年级信息技术下册《指定小海龟的移动位置练习》教案
四年级信息技术下册《指定小海龟的移动位置练习》教案一、教学目标1. 让学生掌握小海龟的基本移动命令,如前进、后退、左转、右转等。
2. 培养学生运用编程思维解决问题的能力,提高学生的编程兴趣。
3. 培养学生团队合作意识,提高学生沟通与协作能力。
二、教学内容1. 小海龟的基本移动命令。
2. 编程实践:设计小海龟的移动路线。
三、教学重点与难点1. 重点:掌握小海龟的基本移动命令。
2. 难点:设计复杂的小海龟移动路线。
四、教学方法1. 任务驱动法:通过设计小海龟的移动路线,引导学生掌握基本移动命令。
2. 合作学习法:分组进行编程实践,培养团队合作意识。
3. 情境教学法:以小海龟探险为主题,激发学生学习兴趣。
五、教学过程1. 导入:讲解小海龟的基本移动命令,如前进、后退、左转、右转等。
2. 新课:讲解小海龟的基本移动命令的用法,并进行示范。
3. 实践:学生分组进行编程实践,设计小海龟的移动路线。
4. 展示:每组展示自己的编程成果,分享设计思路。
5. 总结:讲解编程过程中的重点与难点,对学生进行点评和鼓励。
6. 拓展:引导学生思考如何优化小海龟的移动路线,提高编程技巧。
7. 作业:布置课后编程作业,巩固所学知识。
8. 课后反思:总结课堂教学,针对学生掌握情况调整教学策略。
六、教学评价1. 课堂表现:观察学生在课堂上的参与程度、提问回答情况以及团队合作表现,评价学生的学习态度和积极性。
2. 编程实践:评估学生在编程实践中的作品,包括路线设计的创意性、编程逻辑的合理性以及代码的可读性。
3. 自我评价:鼓励学生进行自我评价,反思在学习过程中的优点和不足,制定改进措施。
七、教学资源1. 小海龟编程软件:为学生提供操作平台,方便进行编程实践。
2. 教学PPT:展示小海龟的基本移动命令及其用法。
3. 编程指导手册:为学生提供参考,帮助他们理解和掌握编程方法。
4. 网络资源:提供相关的学习网站和教程,帮助学生进行课后自主学习。
四年级信息技术下册 聪明的小海龟教案 华中师大版
四年级信息技术下册聪明的小海龟教案华中师大版1、了解“海龟”画正多边形时转角的一般规律。
2、了解“重复”命令的格式。
3、能使用“重复”命令作图,初步认识使用“重复”命令的一般条件。
教学重点:引导学生通过“探”这个过程,“悟”出重复命令REPEAT的功能和格式。
教学难点:引导学生“悟”出简单对称图形的基本部件与重复命令中的重复内容,以及重复命令的重复次数和重复内容之间的关系。
教学过程:一、任务驱动,导入新课首先提出问题:(课件展示)FD80 RT90 FD80 RT90FD80 RT90 FD80 RT90上节课我们已经学习了上面这组命令,请同学们回忆一下,这组命令画出的是什么图形?引导学生观察上面每行命令有什么相同的地方?通过观察发现,上面命令每行都相同,也就是说每行相同的命令重复四次就完成了画正方形的操作。
教师:如果一个图形是靠一部分命令重复几次、几次、上百次、甚至上千次画成的,我们有没有更好更方便的命令一次完成这些操作呢?请学生自学教材。
二、探索,获取新知1、在学生自学完教材并回答出用重复命令(REPEAT)解决上面问题后,教师揭示本节课的课题并板书课题:聪明的小海龟教师:请同学们在自己的计算机上输入REPEAT4[FD80 RT90]命令并运行:(学生动手验证 REPEAT4[FD80 RT90]这条命令具有上面命令组同样功能。
)2、出示问题:(课件展示)(1) FD80 RT90 (2)REPEAT4[FD80 RT90]FD80 RT90FD80 RT90FD80 RT90教师:请同学们将(1)组命令和(2)条命令进行比较,说一说它们之间的共同点和不同点。
学生概括:[FD80 RT90 ]表示(重复的内容)4 表示(重复的次数)重复命令的格式:REPEAT 重复的次数[重复内容]3、试一试:请同学们在自己的计算机上输入下面命令并运行:REPEAT4[FD80 RT90]说一说自己计算机屏幕上的结果。
机器人学高一年级第三节课编程与机器人的优质课
机器人学高一年级第三节课编程与机器人的优质课机器人技术作为一门前沿的学科,正在逐渐融入我们的日常生活。
机器人学已经成为了高中课程的一部分,为学生提供了宝贵的机会去了解和探索这个领域。
在高一年级的第三节机器人学课程中,编程与机器人是重要的内容,这不仅有助于培养学生的创造力和解决问题的能力,还能激发他们对科技的兴趣。
本文将讨论机器人学高一年级第三节课编程与机器人的优质教学。
一、引言机器人学是一门综合性学科,通过在机器人中应用计算机科学、控制工程和机械工程等领域的知识和技术,旨在探索并开发能够代替人类进行各种任务的机器人。
编程是机器人学中至关重要的一部分。
通过编程,学生可以通过指令和算法来控制机器人的行动和行为。
因此,编程与机器人的结合能够帮助学生培养逻辑思维、问题解决和团队合作等技能。
二、编程与机器人的优质教学方法为了创造一节优质的编程与机器人课程,教师需要选择合适的教学方法和工具。
以下是几种优质的教学方法:1.项目驱动学习:通过实际的项目来引导学生学习编程和机器人技术。
教师可以选择一些简单但有挑战性的项目,让学生利用已学知识和技能来完成。
例如,设计一个能够自动清扫房间的机器人程序。
通过这样的项目,学生可以将所学的编程知识应用于实际情境中。
2.探究式学习:让学生自己探索和发现编程和机器人技术的原理和应用。
教师可以提供一些资源和指导,引导学生进行自主学习和实践。
例如,给学生一个机器人模型和一些编程软件,让他们自己尝试编写程序来控制机器人的动作。
3.合作学习:鼓励学生进行小组合作学习,通过互相讨论和合作解决问题,提高学生的团队合作和沟通能力。
在编程与机器人的学习中,学生可以分工合作,每个小组成员负责不同的编程任务,最后将各个部分整合到一起,完成一个共同的目标。
4.启发式评价:通过给予学生实时的反馈和鼓励,激发他们的学习动力。
教师可以使用一些在线编程平台或软件,让学生能够立即看到编程结果,并根据反馈进行调整和改进。
中级课程03 海龟机器人
线路追踪者的结构一般由8位的CPU、直流马达或步进 马达、红外线传感器等构成。为了让机器人更准确的寻线 ,一般使用2组以上的红外线传感器(每组分为-发射管 和接收管)。 线路追踪者按照线路行驶的过程如下: 利用红外线传感器感应线路 → 驱动上有用的信号 → CP U处理信号 → 马达旋转。
TurtleBot
12 눈을 CPU보드에 조립하기 Assemble the eye to the CPU
TurtleBot
13 Assemble the eye to the main body
TurtleBot
14 Assemble the foot
TurtleBot
15 Assemble the front foot to the main body
13
3 Assemble the DC motor to the main body
TurtleBot
4 Assemble the IR sensor
TurtleBot
5 Assemble the wheel and cap nut
TurtleBot
6 Assemble the support
TurtleBot
7 Assemble the support
TurtleBot
8 Assemble the battery case
TurtleBot
9 Assemble the support
TurtleBot
10 Assemble the eye 1
TurtleBot
11 Assemble the eye 2
TurtleBot
小海龟工程师 (2)
小海龟工程师教学目标:知识技能目标:1.学习“LOGO”软件里定义过程的方法。
2.会使用过程调用。
3.会使用过程调用的方法画图形。
过程与方法:课堂中进行分层教学,让学生在每个层次中在自主探索、合作互助的过程中掌握本课的知识要点。
情感、态度、价值观:培养学生自主探索、合作互助的学习能力和表现自我的能力。
教学重点:定义积木和搭积木的方法。
教学难点:搭积木的方法。
教学过程:一、导入:上课前,我们来猜一个谜语:有的方,有的圆,五颜六色真漂亮,平时不用盒中放,能搭长桥能盖房。
(打一玩具) 谜底是积木。
小时候同学们家里都有积木,堆积木是一种益智,有意思的游戏,几块积木就能堆出有趣的图形。
在“LOGO”王国里,也能够“堆”积木,大家想学习吗?二、新授:1.做积木⑴在“LOGO”里,“堆”积木之前,我们先要准备好积木。
画这样的一栋房子,需要什么样的积木呢?需要一个三角形积木,一个正方形积木。
⑵怎样来做积木呢?学习“LOGO”里做积木的方法。
①输入to积木的名子(名子要取得好记,而且只能用字母来取)告诉小海龟,我们要开始做积木了。
(to sjx)②输入画图形的命令。
(repeat 4[fd 60 rt 360/3])2.“堆”积木⑴在命令窗口里输入积木的名字,按回车键后,你看到什么?只要输入积木的名字,我们就可以使用刚才做好的积木。
⑵搭好一块积木,在搭第二块积木之前,我们应该做那些准备工程,怎样才能在正方形积木上面搭另一块积木呢。
⑶搭好一块积木以后,我要走到下一块积木的起点位置做好准备,然后来搭下一块积木。
千万不要忘记了!⑷分层次活动任务:①初层任务,完成老师所演示的积木房子。
②中层任务,完成积木别墅。
③终极任务,完成下面的两架飞机中任意一个。
先把画积木的命令写下来,再去做积木。
三、拓展:你还想组成什么样的图。
很投入还可以不专心评价项目较多较少没有发言情况印象最深刻的内容表现最出色的同学我最得意的作品。
小海龟的特技说课稿.ppt
总结全课,提示新课
请同学分析下面图形的特点,思考如 何完成?
下节课将学习变繁为简的重复命令REPEAT
课后反思
通过完成前面六个由易到难,具有梯度性 的任务,学生已能理解本节课所授的五个命令, 并能在实际中加以运用。同一问题采用不同的 解决方案也培养了学生良好的程序设计思维, 达到本节课预期目标。
——《小海龟的特技》说课稿
深圳市宝安区西乡流塘小学 喻芙蓉
教材分析
《小海龟的特技》是人教版小学六年级《信 息技术》第十二册第三课,全册学习的是LOGO 语言。它是一种结构化程序设计语言。
本节课要掌握的是五个新命令。由于程序设 计的连贯性,本节课的学习要以之前学过的基 本命令为基础,下一课要学习变繁为简的重复 命令,只有学好了这课才能为以后的简化程序 打下基础。
任务驱动,逐层深入
任务二:
1)观察下面的图形有什么特点? 2)应确定怎样的画图顺序?
(一)笔粗命令
格式:SETW N
空格
笔头型号,范围是1~999
功能:设置画笔的粗细,N越大,画出的线越粗。 LOGO系统默认N是1。
笔粗命令(SETW),就像是孙悟空的金箍棒, 能使图形变大变小,变粗变细。
任务二:
用SETW命令画出下面的图形。
CS SETW 1 FD 30 SETW 10 FD 30 SETW 20 FD 30 HT
任务三: 把下面图形擦掉最顶上一段.
cs
(二)笔擦命令
格式:PE 功能:小海龟变成橡皮,边走边擦
掉以前留下的痕迹。
任务四:
用刚学过的PE命令完成下面图形
方案一:
CS FD 60 BK 20 PE BK 20 HT
知识目标:
能指挥小海龟准确地画出图形 掌握SETW、PE、PU、PD、HOME命令
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线路追踪者的结构一般由8位的CPU、直流马达或步进 马达、红外线传感器等构成。为了让机器人更准确的寻线 ,一般使用2组以上的红外线传感器(每组分为-发射管 和接收管)。 线路追踪者按照线路行驶的过程如下: 利用红外线传感器感应线路 → 驱动上有用的信号 → CP U处理信号 → 马达旋转。
Online Lecture V 2.0 roborobo.co.kr
Online Lecture V 2.0 roborobo.co.kr
1 Assemble the DC motor
TurtleBot
EasyBot
12
2 Assemble the main body
TurtleBot
EasyBot
TurtleBot
7 Assemble the support
TurtleBot
8 Assemble the battery case
TurtleBot
9 Assemble the support
TurtleBot
10 Assemble the eye 1
TurtleBot
11 Assemble the eye 2
普通的线路追踪者是用红外线传感器来感应线路的。由 于红外线传感器能分辨出黑色和白色,所以它能感应出白 色背景上的黑线或黑线背景上的白线。红外线传感器的发 射管发射红外线后黑色会吸收,白色会反射,机器人就是利 用这差异感应线路。
Online Lecture V 2.0 roborobo.co.kr
Online Lecture V 2.0 roborobo.co.kr
红外线理疗仪
Online Lecture V 2.0 roborobo.co.kr
红外线又称红外光, 它具有反射、折射、散 射、干涉、吸收等性质 。任何物质只要它本身 具有一定的温度(高于 绝对零度)都能辐射红 外线。红外线传感器测 量时不与被测物体直接 接触,因而不存在摩擦 ,并且有灵敏度高,反 应快等优点。
TurtleBot
沿线走机器人
Online Lecture V 2.0 roborobo.co.kr
红 外 线
Online Lecture V 2.0 roborobo.co.kr
监控摄像头
Online Lecture V 2.0 roborobo.co.kr
红外线水平仪
Online Lecture V 2.0 roborobo.co.kr
TurtleBot
16 Assemble the rear foot to the main body
TurtleBot
17 Assemble the tail
TurtleBot
18 Connect the cable
TurtleBot
TurtleBot
12 눈을 CPU보드에 조립하기 Assemble the eye to the CPU
TurtleBeye to the main body
TurtleBot
14 Assemble the foot
TurtleBot
15 Assemble the front foot to the main body
Online Lecture V 2.0 roborobo.co.kr
红外线传感器是利用红外线的物理性质来进 行测量的传感器。
红外线传感器包括光学系统、检测元件和转 换电路。光学系统按结构不同可分为透射式和反 射式两类。检测元件按工作原理可分为热敏检测 元件和光电检测元件。热敏元件应用最多的是热 敏电阻。热敏电阻受到红外线辐射时温度升高, 电阻发生变化,通过转换电路变成电信号输出。
13
3 Assemble the DC motor to the main body
TurtleBot
4 Assemble the IR sensor
TurtleBot
5 Assemble the wheel and cap nut
TurtleBot
6 Assemble the support