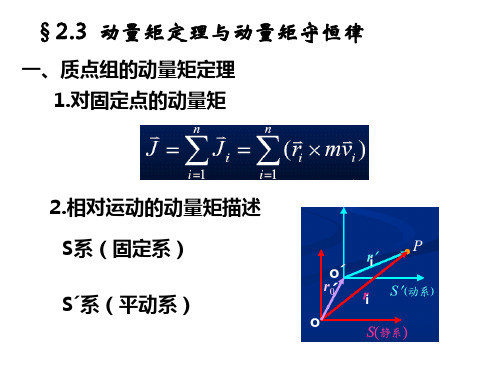
理论力学2
理论力学第2章平面任意力系

力系的平衡条件
1 平衡是什么?
当一个力系的合力和 力矩均为零时,力系 处于平衡状态。
2 两种平衡条件
3 例子带你理解
静力平衡:合力为零; 动力平衡:合力和力 矩均为零。
想象一根平衡的杆子 上有两个重物,它们 的合力和力矩必须为 零才能保持平衡。
力系的分解与合成1源自分解为矢量我们可以将力系拆分为矢量来计算各个力的作用效果。
3 举个例子!
假设我们有一辆汽车,它受到来自引擎、摩擦力和空气阻力的多个力的作用,这些力构 成了一个平面任意力系。
力系的合力和力矩
1 合力是什么?
合力指的是将力系中所有力的作用效果合成为一个力的过程。
2 力矩有何作用?
力矩描述了力对物体的旋转效应,它是力与力臂之乘积。
3 实际应用!
在建筑工程中,我们需要计算各个力的合力和力矩,以保证结构的稳定性和安全性。
2 应用广泛
平面任意力系的原理和方法在工程、建筑、力学等领域有着广泛的应用。
3 继续探索
通过实际问题的解题和应用,进一步深入理解和掌握平面任意力系的知识。
2
合成为合力
将分解后的矢量合成为一个力,即合力。
3
应用灵活多样
分解与合成的方法在解决实际问题时非常有用,可以简化复杂的力系分析。
力系的简化
简化示意图
通过使用简化的示意图,我们可以更清晰地表 示和分析复杂的力系。
矢量图
利用矢量图的方法,我们可以将复杂的力系简 化为几个简单的力的作用效果。
解题方法与实例
理论力学第2章平面任意 力系
欢迎来到理论力学第2章的精彩世界!在本章中,我们将了解平面任意力系的 定义、合力和力矩、平衡条件、分解与合成、简化、解题方法、实例以及总 结与应用。
理论力学第二章
M F d F d
2 2 2 4
F F F
3
4
F F F
3 4
3 4 3 4 1 2
M Fd F F d F d F d M M
平面内任意力偶可以合成一个合力偶,该合力偶系的平衡条件
尾相接,合力沿反方向构成封闭边。
二.平面汇交力系平衡的几何条件
平面汇交力系平衡的充要条件:
Fi 0
平面汇交力系平衡的几何条件:该力系各分力组成的力多边形自行封闭
例2.1 已知AC=CB,P=10kN,求铰链A的约束力和杆DC所受的力。支架
的横梁AB与斜杆DC以铰链C相连,并以铰链A、D连接于铅直墙上。杆DC
三.平面汇交力系合成的解析法
1.力在坐标轴上的投影与力沿轴的分解
FR=FRx+FRy=FRxi+FRy j
2.合矢量投影定理
合矢量投影定理:合力在某一轴上的投影,等于各分力在
同一轴上投影的代数和。
即:FRx=Fx1+Fx2+…+Fxn =∑Fx FRy=Fy1+Fy2+…+Fyn =∑Fy
3.平面汇交力系合成的解析法
2、力偶矩
力偶中两力所在平面称为力偶作用面. 力偶两力之间的垂直距离称为力偶臂.
两个要素 a.大小:力与力偶臂乘积
b.方向:转动方向
力偶矩:M=±Fd=±2A△ABC,代数量, 逆为正,顺为负。单位:N· m,或kN· m
力偶不能合成为一个力,或用一个力来等效替换; 力偶也不能用一个力来平衡。
四.同平面内力偶的等效定理
ix
例2.4 图示踏板,各杆自重不计,已知:F、α、l、B点坐标 (xB、yB)。求(1)力F对A点之矩;(2)平衡时杆CD的拉力。
理论力学 第2章 虚功原理
2.3 虚功原理 达朗贝尔原理
2.3 虚功原理 达朗贝尔原理
2.3 虚功原理 达朗贝尔原理
讨论:虚位移与真正运动时发生的实位移不同:
实位移:一定的力作用下和给定的初条件下运动实际发生的 虚位移:在约束容许的条件下可能发生的
实位移:具有确定的方向,可能是微小值,也可能是有限值虚 位移:微小位移,视约束情况可能有几种不同的方向 实位移:在一定的时间内发生的
广义坐标的选择不是唯一的。广义坐标可以取线位移(x, y,
z, s 等)也可以取角位移(如 , , , 等)。
在完整约束情况下,广义坐标的数目就等于自由度数目。
2.2 自由度和广义坐标
问题: 确定系统的自由度和广义坐标
例1:曲柄连杆机构中,可取曲柄OA的转角为广义坐标,则:
xA r cos , yA r sin xB r cos l 2 r 2 sin2 , yB 0
• 什么是虚位移 • 什么是虚功 • 什么是虚功原理的适用条件
2.3 虚功原理 达朗贝尔原理
一、实位移和虚位移
( real displacement )
2.3 虚功原理 达朗贝尔原理
( virtual displacement )
( 补充)
2.3 虚功原理 达朗贝尔原理
2.3 虚功原理 达朗贝尔原理
2、光滑铰链
WN N r 0
W N N r N 'r 0
FA'
Foy O
ArA FA
B rB
Fox
FN
2.3 虚功原理 达朗贝尔原理
理想约束的典型例子: 3、无重刚杆 4、不可伸长的柔索 5、刚体在粗糙面上的纯滚动
WN (N F )rC 0
2.3 虚功原理 达朗贝尔原理
理论力学第二章

第2章 力系的等效与简化2-1试求图示中力F 对O 点的矩。
解:(a )l F F M F M F M M y O y O x O O ⋅==+=αsin )()()()(F (b )l F M O ⋅=αsin )(F(c ))(sin cos )()()(312l l Fl F F M F M M y O x O O +--=+=ααF (d )2221sin )()()()(l l F F M F M F M M y O y O x O O +==+=αF2-2 图示正方体的边长a =0.5m ,其上作用的力F =100N ,求力F 对O 点的矩及对x 轴的力矩。
解:)(2)()(j i k i Fr F M +-⨯+=⨯=Fa A O m kN )(36.35)(2⋅+--=+--=k j i k j i Fam kN 36.35)(⋅-=F x M2-3 曲拐手柄如图所示,已知作用于手柄上的力F =100N ,AB =100mm ,BC =400mm ,CD =200mm ,α = 30°。
试求力F 对x 、y 、z 轴之矩。
解:)cos cos sin (sin )4.03.0()(2k j i k j F r F M αααα--⨯-=⨯=F D Ak j i αααα22sin 30sin 40)sin 4.03.0(cos 100--+-=力F 对x 、y 、z 轴之矩为:m N 3.43)2.03.0(350)sin 4.03.0(cos 100)(⋅-=+-=+-=ααF x M m N 10sin 40)(2⋅-=-=αF y Mm N 5.7sin 30)(2⋅-=-=αF z M2—4 正三棱柱的底面为等腰三角形,已知OA=OB =a ,在平面ABED 内沿对角线AE 有一个力F , 图中θ =30°,试求此力对各坐标轴之矩。
习题2-1图A r A习题2-2图(a )习题2-3图(a)ABr 解:)sin 45sin cos 45cos cos ()(k j i i F r F M θθθ+︒+︒-⨯=⨯=F a A O )45sin cos sin (k j ︒+-=θθaF 力F 对x 、y 、z 轴之矩为:0)(=F x M230sin )(aF aF M y -=︒-==F Fa aF M z 4645sin 30cos )(=︒︒=F2-5 如图所示,试求力F 对A 点之矩及对x 、y 、z 轴之矩。
理论力学第二章(力系的等效与简化)
z
x c
F
b
o
o x
a
M y ( F ) M o ( F ) Fc
F
M z ( F ) M o ( F ) Fa
15
2019年4月16日星期二
《理论力学》
3、力对点之矩与力对通过 该点的轴之矩的关系 (转动效果的度量)
z
Fz F
y
x A
o
y
力对点之矩矢:
M o (F ) r F
Fx Fxy cos Fx F sin cos
Fy
F
O Fx x
Fy Fxy sin
y F y F sin sin
Fxy
2019年4月16日星期二
Fz F cos
6
力的分解:
F Fx Fy Fz
力F在直角坐标系中的
Fz z
F
O x
Fy
解析式
Fx
2019年4月16日星期二
力矩的符号
M O F
2019年4月16日星期二
力偶矩的符号
M
27
《理论力学》
力偶系和力偶系的合成
MR =M1+M2+…+Mn
M
力偶系
2019年4月16日星期二 28
《理论力学》
§2-3 力系等效定理
1.力系的主矢和主矩 Fn 。 设刚体上作用一平面任意力系F 1 、F 2 · · · · · ·
的夹角可为任意值。 的夹角为90o。
36
在平面任意力系, M与 R
2019年4月16日星期二
思考: 主矢,主矩与简化中心的位置有无关系?
主矢:作用在简化中心,大小和方向却与中心的位 置无关; 主矩:作用在该刚体上,大小和方向一般与中心的 位置有关。
理论力学第二章(2)
合力FR 的大小等于原力系的主矢
合力FR 的作用线位置
MO FR
小结:平面任意力系简化结果讨论
主矢
FR 0
FR 0
主矩
MO 0
MO 0 MO 0
MO 0
最后结果
说明
合力 合力作用线过简化中心
合力 合力偶
合力作用线距简化中心M O FR
与简化中心的位置无关
平衡
与简化中心的位置无关
21
简化为一个力:
c os (FR
,
i)
Fx FR
,
cos(FR ,
j)
Fy FR
原力系的主矢与简化中心O的位置无关
主矩: 原力系中各力对简化中心O之矩的代数和称为原力
系对点O的主矩。
n
M O M O (F1) M O (F2 ) ...... M O (Fn ) M o (Fi ) i 1
主矩与简化中心的选择有关
称点O为简化中心 F1’、F2’、….Fn’平面汇交力系,合力为FR’
M1、M2、….Mn平面力偶系,合力偶矩为MO
10
1、主矢和主矩
FR’=F1’+F2’+….+Fn’=F ’= F
主矢:量(简平称面为力主系矢中)所有各力的矢量和FR′称为该力系的主矢
主矢FR′的大小和方向余弦为:
FR (Fx )2 (Fy )2
11
平面任意力系向作用面内一点简化
一般力系(任意力系)向一点简化汇交力系+力偶系
(复杂力系)
(两个简单力系)
汇交力系 力偶系
力,FR‘(主矢) , (作用在简化中心)
力偶 ,MO (主矩) , (作用在该平面上)
理论力学第2章平面任意力系
空载时轨道A 、 B的约束反力,并问此起重机在使用过程中有无翻
倒的危险。
解:
(1)起重机受力图如图
(2)列平衡方程 :
MA 0:
Q
Q(6 2) RB 4 W 2 P(12 2) 0
MB 0:
Q(6 2) W 2 P(12 2) RA 4 0
6m
解方程得:
W
P
12m
RA 170 2.5P
FR' Fi Fxi Fy j
MO MO (Fi )
3. 平面任意力系的简化结果
(1)FR´= 0,Mo ≠ 0, (2)FR´ ≠ 0,Mo = 0, (3)FR´≠ 0,Mo ≠ 0, (4)FR´= 0,Mo = 0,
合力偶,合力偶矩,MO MO (Fi )
合力,合力作用线通过简化中心O。
3
F2
j
F3
x
(437.6)2 (161.6)2
F1
1 1
100
Oi
1 2
466.5N
200
MO 21.44N m
y
合力及其与原点O的距离如图(c) 。 MO
x
y
d
x
O
FR FR′ 466.5N FR´
FR
O
d MO 45.96mm
(b)
(c)
FR
10
例11 水平梁AB受按三角形分布的载荷作用,如图示。载荷的
M
l
l
30
B
D
° F
3l
P
q
A
21
解:T字形刚架ABD的受力如图所示。
M
l
l
Fx 0
30
B
FAx 1 • q • 3a Fcos30 0
【理论力学2】第二章碰撞

积分 或
得
LO 2 dLO LO1
i 1
n
t
0
(e) ri dI i
n t n (e) t (e) LO 2 LO1 ri dI i ri dI i i 1 0 i 1 0
n n (e) (e) LO 2 LO1 ri I i M O (I i ) (2-4) i 1 i 1 ( e) 称 ri I i 为冲量矩 其中不计普通力的冲量矩 (2-4)是用于碰撞过程的动量矩定理 又称为冲量矩定理: 质点系在碰撞开始和结束时对点O的动量矩的变化 等于作用于质点系的外碰撞冲量对同一点的主矩
i 1 i 1 i 1 i 1
1.用于碰撞过程的动量定理——冲量定理
(e) 因为 I i 0 于是得
i i 1
(e) mii mii I i
n
n
n
i 1
i 1
i 1
(2-2)
式(2-2)是用于碰撞过程的质点系动量定理 因此又称为冲量定理: 质点系在碰撞开始和结束时动量的变化 等于作用于质点系的外碰撞冲量的主矢 (2-2)可写成 n mC I i(e) mC (2-3) i 1 分别是碰撞开始和结束时质心的速度 式中 C 和 C
2gh2
于是得恢复因数 h2 k h1 几种材料的恢复因数见表
碰撞物体 铁对铅 木对胶 木对 的材料 木 木 恢复因数 0.14 0.26 0.50 钢对 钢 0.56 象牙对象 牙 0.89 玻璃对 玻璃 0.94
对于各种实际的材料 均有0<k<1 由这些材料做成的物体发生的碰撞称为弹性碰撞 物体在弹性碰撞结束时 变形不能完全恢复 动能有损失 k=1称为完全弹性碰撞 k=0称为非弹性碰撞或塑性碰撞
理论力学第2章
29
n
m m1 m2 m3 mn mi
i 1
m
mx2
m 2y
m z2
;cos
mx m
,cos
my m
,cosg
mz m
显然空间力偶系的平衡条件是:
m m i 0
投影式为:
mx 0
my 0
mz 0
理论力学
30
§2-3 力系的简化与合成
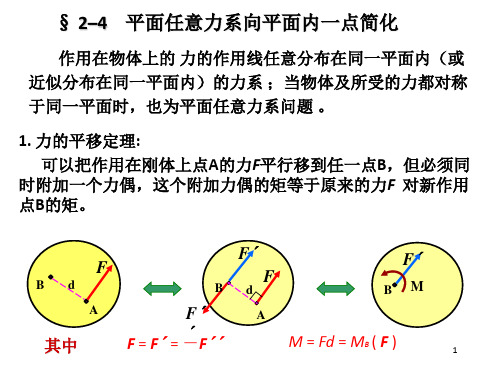
一、力线平移定理
力线 平移 定理
作用在刚体上的力可以平行移到同一刚体内任意一 点,但必须同时附加一个力偶。附加力偶的力偶矩 等于原来的力对新作用点的矩。
3.合力矩定理 定理:合力对某点之矩,等于所有各分力对同一点之矩的 矢量和(平面问题为代数和)。
理论力学
14
4.力对轴的矩
定义: mz (F )mO (Fxy )Fxy d 2OA'B'的面积
它是代数量,方向规定 + –
mz (F )mz (Fz )mz (Fxy )mO (Fxy )
结论:力对平行或与它相交 的轴的矩为零。即力F与轴 共面时,力对轴之矩为零。
Q mO(F) mO(F ') F(x d) F ' x
d
Fd mO (R )
由于O点是任取的
m F d + —
说明:① m是代数量,有+、—; ②F、 d 都不独立,只有力偶矩 m F d 是独立量; ③m的值m=±2⊿ABC ; ④单位:N• m
理论力学
21
性质3:平面力偶等效定理 作用在同一平面内的两个力偶,只要它的力偶矩的大小相等, 转向相同,则该两个力偶彼此等效。
作用面,所以空间力偶必须用矢量表示。称为力偶矩矢。
理论力学第二章(汇交力系)

2) 合力
力矢量合成的力多边形法则: 1) 各分力首尾相接,次序可变;
R 为封闭边。
z F3 FR F2 F1 x
5
2、空间汇交力系合成的几何法
r r r r r r FR = F1 + F2 + F3 + F4 = Σ Fi ,
合成为一个合力,合力的大小与方向等于 各分力的矢量和,合力的作用线过汇交点.
FR = F1 + F2 + L + Fn = ∑ Fi
向两个坐标轴投影,
FR = FRx + FRy = (∑ Fix ) + (∑ Fiy )
2 2 2
2
FR
合力方向 FRx ∑ Fix FRy cos θ = = , sin θ = = FR FR FR 合力投影定理:
∑F
FR
iy
10 合力在任一轴上的投影等于各分力在同一轴上投影的代数和。
FDA
P
FDB=FDC=289N。
18
例 :起重机起吊重量P = 1 kN, ABC 在 yz 平面内,求:立柱 x’ AB、绳BC,BD,BE 的拉力。 解:B点有四个未知力汇 交,故先从C点求解,
[C] 平面汇交力系 z 750
B 450 E FBE FBD 450 450 D x A y 450 F BA 450 FCB FBC 300 FCA
汇交力系的平衡条件为:力系中各力在x、y、z三个坐标 轴的每一轴上投影之代数和均为零。 14 汇交力系平衡的几何条件为:力多边形自行封闭。
汇交力系平衡条件的应用
例:园柱物置于光滑的燕尾槽内,已知:P 为 500 N,求: 接触处A、B的约束力。
理论力学 (2)

静力学引言1.刚体:在力的作用下,其内部任意两点之间的距离始终保持不变的物体。
2.力:力是物体之间相互的机械作用,这种作用的效果是使物体的运动状态发生变化,同时使物体的形状发生改变。
3.静力学的两个基本要素:力和力螺旋。
4.力系简化或等效替换中的基本概念① 等效力系:两力系对同一物体作用效果相同② 力系的等效替换:把一个力系用与之等效的另一个力系代替 ③ 力系的简化:一个复杂力系用一个简单力系等效替换的过程第一章 静力学公理和物体的受力分析 1. 静力学公理⑴ 公理① 力的平行四边形法则② 二力平衡条件 只受两个力作用而平衡的构件,作用线必在两点连线上。
③ 加减平衡力系原理 ⑵ 推论① 力的可传性 力的三要素为:大小、方向、作用线。
(滑动矢量) ② 三力平衡汇交原理③ 作用力与反作用力 ④ 刚化原理2. 约束和约束力⑴ 基本概念:自由体、非自由体、约束、约束(反)力 ⑵ 几种常见约束① 光滑面约束(N F ) ② 柔索类约束(T F )③ 光滑铰链约束(径向轴承、圆柱铰链、固定铰链支座等):因主动力未定时,约束力方向不定,所以用正交分力x F 、y F 表示。
④ 滚动支座(N F ):垂直于支撑面⑤ 球铰链、止推轴承:三正交分量(x F 、y F 、z F )3. 物体的受力分析和受力图分析过程⑴ 明确研究对象,取分离体。
(注意是否为整体)⑵ 先标出主动力,再利用二力杆原理、约束力特点、作用力与反作用力原理、三力平衡汇交原理等分析系统中的被动力,从而得出受力分析图。
第二章 平面力系1. 平面力系分为平面汇交力系、平面力偶系、平面平行力系、平面任意力系。
2. 平面汇交力系⑴ 平面汇交力系合成的几何法:力多边形法则 平衡条件:该利系多边形自行封闭。
⑵ 平面汇交力系合成与平衡的解析法(合力R F )① 建立平面直角坐标系原因:此时分力大小与力的投影成正比,非直角坐标系(平行四边形法则求分力)不成正比。
理论力学 第2章 平面力系的简化和平衡
l 0
xq
(
x ) dx
FR'0,MO0;故可合成为一个合力,且
FR=
FR'=
l 0
q
(
x ) dx
FR大小等于分布载荷图形的面积
合力FR的作用线到O的距离为:
h=MO/FR'=
l xq
0
(x)dx
/
lq
0
(x ) dx
FR的作用线通过分布载荷图形的形心。 33
情况 向O点简化的结果 力系简化的最终结果
分类 主矢FR' 主矩MO (与简化中心无关)
1
FR’=0 MO=0 平衡状态(力系对物体的移动
和转动作用效果均为零)。
2
FR'=0
MO0 一个合力偶,M=MO。
3
FR0
MO=0 合力FR=FR,作用线过O点。
4
FR‘0
MO0 一个合力,其大小为 FR=FR,
m
求得: RA AB cos30 144N
0.24
对CD杆:m 0 m Rc 0.182 0.242 0.2322 0
§2–3 平面任意力系的合成与平衡
平面任意力系:各力的作用线在同一平面内,既不汇交为一点 又不相互平行的力系叫∼。
[例]
力系向一点简化:把未知力系(平面任意力系)变成已知 力系(平面汇交力系和平面力偶系)
现mo (R ) mo (F1)mo (F2 )证毕
3、平面汇交力系合成与平衡的解析法
从前述可知:平面汇交力系平衡的必要与充分条件是该力系
的合力为零。 即:
R 0 Rx2 Ry2 0
Rx X 0 Ry Y 0
理论力学-2-力矩的概念和力系的等效与简化
在刚体上作用三个相互平行的力,这三个力是等效的,即 它们可以互相替换而不改变刚体的运动状态。
04
CATALOGUE
刚体的转动
刚体的定轴转动
定义
刚体绕某一固定轴线旋转的转动称为定轴转动 。
描述参数
定轴转动的角速度、角加速度和转动惯量。
运动特点
刚体上任意一点到旋转轴的距离保持不变,刚体上各点的线速度大小相等,但 方向不同。
刚体的平面运动
描述参数
刚体的平动和绕某轴的转动。
定义
刚体的运动轨迹位于一个平面内,称为平面 运动。
运动特点
刚体上任意一点的速度方向与平面平行,刚 体上各点的速度大小相等。
刚体的定点运动
定义
刚体绕通过某固定点O的轴线旋转的转动称为定点转动。
描述参数
刚体的角速度、角加速度和转动惯量。
运动特点
刚体上任意一点到定点O的距离保持不变,刚体上各点的线速度 大小相等,但方向不同。
国际单位制中,力矩的单位是牛顿米(N·m )。
力矩的几何意义
表示方法
力矩的几何意义可以通过向量点积来 表示,即M=r×F,其中r表示从转动 轴到作用点的矢量,×表示向量点积 。
方向
力矩的方向与力臂的方向垂直,遵循 右手定则,即右手握拳,四指指向转 动方向,大拇指指向即为力矩的方向 。
力矩的物理意义
转动效果
力矩描述了力对物体转动的效应,它决定了物体转动 的角速度和角加速度。
转动平衡
在转动平衡状态下,合外力矩为零,即物体不发生转 动。
转动惯量
力矩和转动惯量共同决定了物体的转动效果,转动惯 量越大,物体对力矩的响应越慢。
02
CATALOGUE
理论力学第二章 质点组力学-2)
m222
0
0
m1gl
cos
(4)
联立方程(1)(2)(3)(4)解得
1x
2m22 gl sin
m1 m2 m1tg 2 m2 sec2
1y
2 m1 m2 gl sin
m1 m2 sin2
2
u
2m12 gl sin
m1 m2 m1tg 2 m2 sec2
ax
m m
ax
g
g
二人均以匀加速向上爬
t
2
t2
2s ax 2s ax
t t
t
ax
2ms ms m m g
m m sg ms ms
注:也可用对通 过滑轮中心水平 轴的动量矩定理
质量不等的两人能同时到达顶端的前提条件
ax 0, ax 0
即
ms ms, 且 m m 或ms ms,且 m m
i 1
i 1
i 1
i 1
3.在质心系中分析以上四项
s´系的原点固定在质点组的质心上,则:
第一项:
rvo rvc ,vo vc , rvc 0
n (rvo m ivo ) n (rvc m ivc ) rvc n m ivc 对o点的动量矩
求和后,
i 1, n
叙述:质点组动能的微分等于质点组所受的外力与内 力的元功之和。
特点:①内力所作的功不能互相抵消。
②质点组不受外力或合外力为零,动能不一定守恒。
三、质点组对质心的动能定理 质点组内力做功
引入质心参照系,质点组中第i个质点的动能
d
(1 2
mii2
)
v F (e)
i
drvi
v F (i)
理论力学第二章
解:AB、BC杆为二力杆,
取滑轮B(或点B),画受力图。 用解析法,建图示坐标系
Fix 0
FBA F1 cos 60 F2 cos 30 0
F1 F2 P
解得: FBA
7.321kN
Fiy 0 FBC F1 cos 30 F2 cos 60 0
2 2
(1)
二.平面汇交力系合成的解析法
FR Fi
(a) (b) (c)
Fi Fxii Fyi j FR FR x i FR y j
将(b)代入(a)式,并注意i 和 j为常矢量,则有
FR ( Fxi )i ( Fyi ) j
(今后为了便于书写,将下标“i”省略。) 比较(c)、(d)等式两边,可得
FCA AC 1 P AB
解得 图2-2
FC B BC 1 P AB 2
FCA 10kN, FCB 5 kN
也可给P一定比例,量出FCA和FCB的大小,如取比例尺为1cm=5kN,作 出封闭的力三角形后,由比例尺量得
FCA 10kN, FCB 5 kN
例2-2 已知压路机碾子重P=20kN, r=60cm, 欲拉过h=8cm的障碍物。
转动效应--取决于力矩的大小、方向。
一、力对点的矩
B
力矩:力绕某一点转动效应的度量。
F
M O ( F ) F d
+
A
d
-
说明:
① M O ( F )是代数量。
② F↑,d↑转动效应明显。 ③ M O ( F )是影响转动的独立因素。
M O ( F )=0。 当F=0或d=0时,
④单位Nm或kNm ⑤ M O ( F ) =2⊿AOB=Fd ,2倍⊿形面积。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§10-2 动量定理
2.质点系的动量定理
dp Fi ( e ) dt
式
(e) p p I 或 2 1 i i 1
n
动量定理微分形式的投影式
动量定理积分形式的投影
dp x (e) Fx dt
p 2 x p1x I
(e) x
dp y
dt dp z (e) Fz dt
14
§10-2 动量定理
2.质点系的动量定理 设质点系有 n 个质点, 第 i 个质点的质量为 mi,速度为 vi
外力:
质
Fi ,
(e)
内力:
Fi (i )
d(mi vi ) Fi (e) dt Fi (i )dt 点i: d(mv ) Fdt 质点系: dP d(mi vi ) Fi (e)dt Fi (i )dt
方向:同 vC
p
l m 6 方向:同 vC
大小: p mvc
8
例:求图示均质物体或物体系统的动量。
vA= v ⑥已知:m,l,
p mvC
解: AB 杆做平面运动
瞬心为P v vA AB AP l sin
v vC AB CP 2 sin mv p mvC 2 sin
pbb1 paa(流动稳定) 1
例: 已知:流体为不可压缩的理想流体,且流动稳定(定常),流 体密度ρ, 单位时间体积流量qv。求:管壁的附加动约束力。
v1
∵ qv=Av=Q=A1v1=A2v2
2 Fx qv v2 A2 v2 2 F q v A v v 1 1 1 y
pB
11
?
两均质轮质量均为 m2,半径均为R,履带质量为m1,长为 L, 求系统的动量 p 。 m2 m1 v R R m2
p (2m2 m1 )v
12
作业
思考题 (第七版) 10-1
13
§10-2 动量定理
1.质点的动量定理
ma F
dv m F dt
d(mv ) F dt
p
大小: p mvc 方向:同 vC
me p
大小: p mvc 方向:同 vC
m R
7
质点系的动量:
p mvC
p pi mvCi
例:求图示均质物体或物体系统的动量。 ④ m
C
⑤
m l O
C
vc
l/3
vc
p
大小: p mvc
人相对船以 vr 行走.求:此时的船速
x
v1
vr
③ 质点系动量守恒定理 若
Fx( e ) 0, 则
px= 恒量
Q 不记水阻 W FN
人未走时 Px1 人走时 由
W Q v1 g W Q Px 2 v2 (v2 vr ) g g
解: ① 研究对象: 整体 (人和船组成的系统) ② 受力及运动分析
得 或
dp Fi dt dIi dp 质点系动量定理的微分形式 (e) Fi dt
(e) (e)
0
即质点系动量的增量等于作用于质点系的外力元冲量的矢量和 ;或质
点系动量对时间的导数等于作用于质点系的外力的矢量和(主矢).
15
§10-2 动量定理
2.质点系的动量定理
dp Fi dt dIi
9
B
P ωAB
vB
φ
C
mvc
vA
A
例:求图示均质物体或物体系统的动量。 ⑦ 皮带轮传动系统由均质轮和均质皮带组成, 该系统的动量等于多少? m C R1
?
ω1
ω2
m2 O2
R2
O1
m1
∵系统对称于两轮轴心连线
∴系统质心必在该连线上 系统质心的速度始终为零 ∴系统的动量 p = Mvc = 0 (M=m+m1+m2) 10
v
mv
m
v
② 质点系的动量:
n
质点系内各质点动量的矢量和,称为质点系的动量。用 P 表示。
p mi vi(矢量和)
i 1
2
质点系的动量: p mi vi
i 1
n
已知 m1 = 2m2 = 4m3 ,v1 = v2 = v3 = v ,求系统动量。 v3 m3 45°
x
n
v2 m2
y
p
m1v1 m1 v1
y
O 解:
p mi vi m1v1 m2v2 m3v3
i 1
O
m2v2
m3v3 x
p
px m2v2 m3v3 cos 45
py m1v1 m3v3 sin 45
p ( p, x) arccos x p py ( p, y ) arccos p
qV dt (vb va ) (W Fa Fb F )dt
qV (vb va ) W Fa Fb F
vb 设
W
b b1
解: 分析aa与bb之间的流体(质点系) dt 内的动量变化为
F F F F F
由于
为静约束力 为动约束力
W Fa Fb F 0
d(mv ) Fdt
质点动量定理的微分形式
即:即质点动量的增量等于作用于质点上的力的元冲量. 在t1至t2时间内积分,得
v
v2
1
t2 d (mv ) Fdt t1
t2 mv2 mv1 Fdt I
t1
质点动量定理的积分形式
即:质点在 某一 时间间隔内动量的变化等于作用于其上的力在 同一时间内的冲量。
为何有加强圈的原因
22
太空拔河-质点系动量定理实例分析
宇航员 A 、 B 的质量分别为 mA 、 mB 。 开始时二人在太空保持 静止。若A的力气大于B,则拔河胜负如何?
C
F ( e) 0, mAvA mBvB (mA mB )vC 0
∴ 二人拔河不分胜负! 23
§10-3 质心运动定理
px1 px 2
当Q<<W时:
Q v2 v1 vr W Q
v2 v1
19
Fx(e) 0
例 已知 杆 l,小球 mB,滑块 mA;φ =φ0 静止释放。杆释放后, t为常量)求滑块A的最大速度 近似有: 0 cos( ω mAg ③ 质点系动量守恒定理 O A vA x 若 Fx( e ) 0, 则 p x =0
例:求图示均质物体或物体系统的动量。 ⑧ OA 、AB和轮B均为均质物体,质量均为m
vA
A
l1vA O l2
p pi mvCi pOA p AB pB
AB杆瞬时平动
B l3
vA
l1 P m ml1 ml1 2
pOA
pAB
mB m A mB
Fx(e) 0
l0
20
例: 已知:流体为不可压缩的理想流体,且流动稳定(定常),流 体密度ρ, 单位时间体积流量qv。求:管壁的附加动约束力。
Fa a va a a1 F a1 b b1 Fb
(e) (e) 由动量定理 dp Fi dt dI i 有:
(e)
(e)
或
dp Fi ( e ) dt
质点系动量定 理的微分形式
在瞬时 t1至 t2 段时间内积分,有 ~ t2 t1 令 p1 ~ p2
p2 p1 I i( e )
i 1
n
质点系动量定理的积分形式
即在某一时间间隔内,质点系动量的改变量等于在这段时间 内作用于质点系外力冲量的矢量和. 质点系的内力不能改变质点系的动量 16
p mvC
结论:质点系的动量等于质点系的总质量与其 质心速度的乘积。
4
质点系的动量:
p mi vi
i 1
n
p mvC
质点系的动量 p 在直角坐标系中的投影为
px mi vix m vcx
py mi viy m vcy
pz mi viz m vcz
1.质量中心(质心)
例:已知ω为常量,均质杆OA=AB=l,两 杆质量皆为 m1,滑块 B 质量为m2,求:质 心运动方程、轨迹及系统动量.
z
ri
O
rC
mi C 解:设
xC
ω
φ
x
质心坐标式
y
t,质心运动方程为
m1 l 3l m1 2m2l 2 2 cos t 2m1 m2
px p y
2
2
3
ห้องสมุดไป่ตู้
p mi vi
i 1
n
质点系动量的另一算法:
C:质心,即质量中心
z
ri
O x
rC
mi C
设质点系内各质点对固定点O的矢径为 ri, 则
y
mi ri 质心坐标式 rc (m mi ) m
d vi ri dt
dri d d ( mi ri ) p mi vi mi ( mrC ) mvC dt dt dt
y
A1
Fx
A2
v2
即使v1=v2也存在动反力
Fy
x Fx qv (vbx vax ) 解: 投影式 Fy qv (vby vay ) O
Fx qv (v2 0) qv v2 Fy qv (0 (v1 )) qv v1