轮式拾装机动臂举升能力特性优化设计
装载机性能特点与配置说明

报价汇总报价表单位:万元LW500KL装载机性能特点与配置说明徐工集团工程机械股份有限公司装载机系列产品荣获“中国名牌产品”。
LW500KL轮式装载机是徐工集团工程机械股份有限公司全力打造的新一代K 系列节能环保型装载机的主导机型,基于具有良好市场表现的徐工精品—LW500K 的结构平台,进行。
具有节能高效、高可靠性的特点。
主要特点如下:(一)节能型动力传动系统1.发动机采用上柴SC9D220.2G2直列、增压、水冷、空空中冷、四冲程、六缸、直喷式发动机,额定功率为162KW,转速为2000r/min,最大扭矩980N.m/1300~1500rpm。
具有二级空气滤清器,能适应多粉尘工况;由于该发动机不仅具有高可靠性、高适应性,而且还具有低油耗、低排放的优点,排放达到中国Ⅱ阶段标准,是专门针对工程机械作业工况精心设计制造并经过验证的优质产品。
2.变速箱变矩器专门设计节能型行星式液力变速器,采用大能容、节能型的双涡轮变矩器和加强型变速箱,实现与发动机的完美匹配。
3.驱动桥采用工程机械专用加强型驱动桥,质量稳定,性能可靠,维修方便。
(二)液压系统转向系统采用全液压转向,转向平稳、可靠;工作泵采用优质高压大排量齿轮泵,性能可靠;工作液压、转向液压系统独立,复合工况效率高。
(三)制动系统行车制动采用气顶油、钳盘式四轮制动系统,可发挥强大的制动力,同时又可减轻每个制动活塞的负担,提高耐久性;配置切断动力制动模式,减少磨损,坡道作业更安全。
(四)驾驶室和操纵系统采用分体式新型豪华驾驶室,内部操作空间大,视野开阔;造型新颖别致、安全可靠;加大了前后挡风玻璃,视野极为开阔;防紫外线有色玻璃,丝网印刷遮阳膜,驾驶隔音降噪,室内布置冷暖空调(选配)、豪华座椅;仪表显示布置合理。
(五)可维修性各种油位检查、油液添加及润滑脂加注等保养点均布置在易于接近的部位,空滤器滤芯、电气设备等的检修拆换均可方便进行。
发动机护罩采用大侧门、上翻式设计,开启角度大,方便发动机可使发动机及散热器检修,维护保养轻松简便。
ZL50型装载机动臂结构的拓扑优化设计

ZL50型装载机动臂结构的拓扑优化设计随着工程机械的技术不断发展,装载机在建筑、矿山、港口等领域的使用频率越来越高。
为了提高装载机的工作效率和降低能耗,传统的设计方法已经不能满足现代市场需求,需要借助拓扑优化设计来实现更轻量化、更坚固耐用、更高效率的装载机动臂结构设计。
ZL50型装载机是目前市场上广泛使用的一种装载机,其动臂结构在机械设计中起着至关重要的作用。
动臂结构的设计优化将直接影响装载机的性能和使用寿命。
因此,针对ZL50型装载机动臂结构的拓扑优化设计是值得深入研究的课题。
拓扑优化设计是一种结构设计方法,通过改变零件的材料分布和形状来实现结构的最优布局,达到最优性能的设计目标。
通过拓扑优化设计,可以使装载机动臂在保证强度和刚度的前提下,减少结构重量,提高动臂的工作效率和使用寿命。
在进行ZL50型装载机动臂结构的拓扑优化设计时,首先需要建立动臂的有限元模型,采用计算机辅助设计软件对动臂结构进行分析和优化。
在优化设计过程中,可以设置多种约束条件和设计指标,比如最小重量、最大强度、最小振动等。
在动臂结构的拓扑优化设计中,可以考虑以下几个方面:1.材料的选择:选择优质的轻量化材料,如高强度合金钢或碳纤维复合材料,可以有效减少动臂的重量,提高装载机的工作效率。
2.结构的优化:通过优化动臂的结构布局和形状,可以减少应力集中现象,提高动臂的强度和刚度,延长使用寿命。
3.加强关键部位:在动臂结构的拓扑优化设计中,可以对关键部位进行加强设计,提高其承载能力和抗疲劳性能。
4.减少焊接连接:尽量减少动臂结构中的焊接连接,采用更加紧凑的结构设计,可以降低结构疲劳裂纹的风险,提高装载机的安全性。
通过以上的拓扑优化设计,可以使ZL50型装载机动臂结构在保证强度和刚度的前提下,实现更轻量化、更坚固耐用、更高效率的设计目标。
这不仅能提高装载机的工作效率和使用寿命,还能降低装载机的能耗和维护成本,符合现代市场需求和可持续发展的要求。
轮式装载机工作装置运动仿真与优化设计的开题报告

轮式装载机工作装置运动仿真与优化设计的开题报告一、研究背景轮式装载机是工农业生产中重要的机械装备之一,主要用于装卸土方、石方、砂石、煤柴等散装物料,也可用于地基工程、道路维护、城市清洁等。
随着市场的不断发展和用户的不断提高要求,轮式装载机需要在性能、效率、可靠性等方面得到进一步提高。
在这些方面,工作装置是重要的研究对象。
对工作装置的运动仿真和优化设计可以帮助设计和生产轮式装载机,提高其性能表现。
二、研究内容本研究将对轮式装载机工作装置的运动进行仿真,同时进行优化设计,具体内容如下:1. 轮式装载机工作装置的运动机理分析2. 基于 Solidworks/Simulink 软件,对轮式装载机工作装置进行运动仿真,包括举升、倾斜、回转等动作。
3. 基于仿真结果,优化设计轮式装载机工作装置,提高其性能表现。
4. 对优化后的装置进行验证实验,并与仿真结果进行对比分析。
三、研究意义1. 对轮式装载机工作装置运动机理进行分析,可以揭示其内部结构和动作原理,为优化设计提供更好的基础。
2. 运动仿真和优化设计可以帮助设计人员更好地理解工作装置的运动特性,优化设计方案,提高轮式装载机的性能表现。
3. 研究成果可以为工程实践提供理论支持和技术指导。
四、研究方法本研究将采用以下研究方法:1.文献调研:对轮式装载机工作装置的运动机理、举升、倾斜、回转等基本动作原理进行研究。
2.Solidworks/Simulink 软件:对轮式装载机工作装置进行运动仿真,建立数学模型,对运动过程进行仿真和分析。
3.优化设计方法:基于仿真结果,运用优化设计方法,确定轮式装载机工作装置的优化方案。
4.实验验证:对优化方案进行实验验证,并与仿真结果进行对比分析。
五、研究计划时间安排如下:第一阶段(1-3月):文献调研,了解轮式装载机工作装置的基本运动原理,熟悉 Solidworks/Simulink 软件等工具的使用。
第二阶段(4-6月):建立轮式装载机工作装置的数学模型,进行进行运动仿真,并进行初步分析。
ZL50轮式装载机工作装置动力学特性
• 34 •内燃机与配件ZL50轮式装载机工作装置动力学特性Dynamic Simulation Analysis of Working Device for ZL50 Wheel Loader Based on ADAMS肖才远 XIAO Cai-yuan;张桂菊 ZHANG Gui-ju;邓瑞麟 DENG Rui-lin;陈英春 CHEN Ying-chun;王小龙 WANG Xiao-long(邵阳学院机械与能源工程系,邵阳422000)(Department of Mechanical and Energ^^Engineering,Shaoyang University,Shaoyang422000, China)摘要:以某型轮式装载机为研究对象,利用Solidworks三维造型设计软件对轮式装载机工作装置建立三维模型,导入动力学仿真 软件ADAMS中,添加约束、载荷建立虚拟样机系统。
对工作装置进行动力学仿真分析,获得主要铰接点处的载荷受力曲线,为轮式装 载机工作装置的设计和改进提供了理论参考依据。
Abstract:Taking a certain type of wheel loader as the research object,the 3D models of its working device were established and assembled by3D design software Solidw-orks.And then the3D models were imported into dynamics simulation software ADAMS to build the virtual prototype system after adding constraints and load.Through simulation analyzing on working device,the mainly articulated point5s load stress cu r^^es were obtained for working device.Thus proved its movement characteristics in line with the actual working condition, which provides the theor^^reference of design and improvement for wheel loader working device.关键词:轮式装载机;工作装置;ADAMS;动力学仿真Key words:wheel loader;w-orking device;ADAMS;dynamic simulation〇引言轮式装载机是我国工程领域主要的施工机械,工作装基金项目:湖南省教育厅高等学校科学研究项目(15C1240);湖 南省教育厅创新平台开放基金项目(16K080);2016年湖南省大学生研究性学习和创新性实验计划项目。
轮式装载机动臂举升油缸缓冲特性探讨

轮式装载机动臂举升油缸缓冲特性探讨马红欣【摘要】采用理论分析的方法,分析了动臂举升油缸承载状况,并对其缓冲特性进行了讨论,提高了装载机的平顺性、舒适性和作业效率.【期刊名称】《机械工程与自动化》【年(卷),期】2012(000)004【总页数】3页(P196-197,200)【关键词】装载机;举升油缸;缓冲特性【作者】马红欣【作者单位】山西电力设备厂,山西太原030031【正文语种】中文【中图分类】TH2430 引言动臂举升油缸在装载机的整个工作循环中起着十分重要的作用,操作人员为了提高整个装运工作的效率,经常要求提高举升油缸的活塞运动速度,此往复运动的速度时常会达到每秒几十米。
然而,活塞如此高频地来回运动往往会造成整台机器的剧烈冲击与振动,使得驾驶员过早地产生疲劳,影响了人机整个系统效率的发挥。
因此,为了能够让装载机安稳、高效地工作,提高传动部件的可靠性和寿命,必须在活塞杆接近运动终止时进行阻尼设置,起到有效的缓冲效果。
此外,装载机经常在“非路面”的恶劣环境中工作,在其满斗运行过程中,由于凹凸不平路面的随机激励,从而引发了动臂举升油缸的类似点头现象,进一步恶化了铲斗的平动性能,造成斗内物料的撒落和对整套液压系统的撞击。
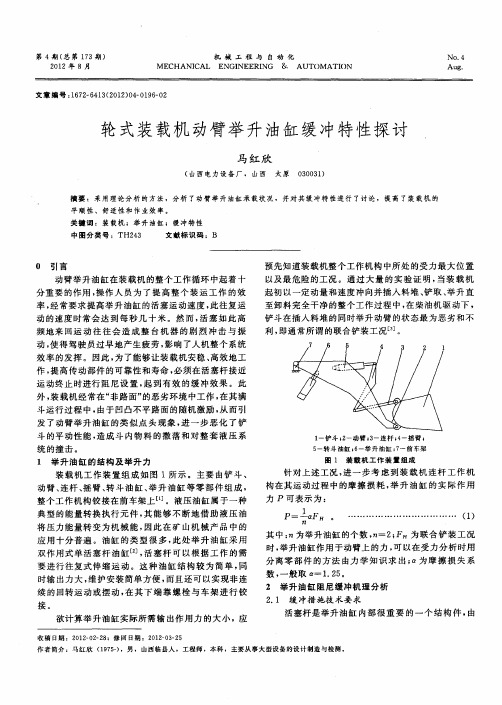
1 举升油缸的结构及举升力装载机工作装置组成如图1所示。
主要由铲斗、动臂、连杆、摇臂、转斗油缸、举升油缸等零部件组成,整个工作机构铰接在前车架上[1]。
液压油缸属于一种典型的能量转换执行元件,其能够不断地借助液压油将压力能量转变为机械能,因此在矿山机械产品中的应用十分普遍。
油缸的类型很多,此处举升油缸采用双作用式单活塞杆油缸[2],活塞杆可以根据工作的需要进行往复式伸缩运动。
这种油缸结构较为简单,同时输出力大,维护安装简单方便,而且还可以实现非连续的回转运动或摆动,在其下端靠螺栓与车架进行铰接。
欲计算举升油缸实际所需输出作用力的大小,应预先知道装载机整个工作机构中所处的受力最大位置以及最危险的工况。
浅谈装载机工作装置优化设计

浅谈装载机工作装置优化设计摘要:装载机是工程机械的重要机种之一,其工作装置设计的合理性和质量直接影响着装载机的各项工作性能。
本文应用参数优化建模和设计方法,对反转六连杆机构建立了参数优化模型,确定了变量系统,目标和约束系统,用优化软件进行了优化设计。
对工作装置所得的优化结果进行了分析,剖析了机构形式的优缺点和适用范围。
装载机是一种常用的铲土运输机械,广泛应用于土木、建筑、水利、矿山等工程,起着减轻劳动强度、提高施工效率和质量的重要作用。
目前国内研究和采用得较多是反转六连杆,这种机构形式简单、尺寸紧凑。
当铲斗铲掘物料时由于是反转机构,转斗油缸大腔进油工作,可以获得较大的铲掘力。
也就是说,铲起同样重量的物料,转斗油缸的尺寸可以设计得较小。
而且转斗油缸后置,使司机有较好的视野。
反转六连杆机构尤其多用于中小型装载机工作装置中。
本文在现有的工作装置优化设计研究成果的基础上,进一步研究和完善六连杆机构设计,针对六连杆机构建立有一定通用性的分析和优化模型,得出满足设计要求的合理方案,总结设计知识和优化经验。
1.参数优化设计概述目前国内工作装置的设计主要采用类比法、画图试凑法、解析法和参数优化方法。
其中,参数优化方法越来越受到重视,取得了很大发展和广泛应用。
类比法和经验法一般只适用于同类型产品,即结构型式、工作对象和条件基本机同的设计。
这样设计所得的产品即使通过了校核检验,符合基本设计要求,但是否能达到性能最优,是否是最好的设计结果,还很值得研究。
参数化设计(Parametric Design)是从CAD技术中发展起来的。
参数化技术主要用于结构形态比较定型的设计对象,对某定型产品,结构形式确定,根据某些具体条件和控制参数决定产品在某一结构形式下的结构参数,从而设计出不同的产品。
实际上,参数化技术就是将产品的一些信息,包括尺寸、数据、特征、模式等定义为变量,这些变量的改变就表示产品模型的改变。
参数化技术适用于常用件、系列件、标准件的设计,只需建模一次,就能得到不同规格的零件模型。
拉臂式垃圾车工作装置优化设计
拉臂式垃圾车工作装置优化设计垃圾车作为城市环卫设备中最关键的一种,其工作装置的设计和优化对于提高垃圾收集和处理效率至关重要。
在拉臂式垃圾车中,主要的工作装置包括拉臂、垃圾桶和液压系统。
本文将从几个方面来介绍拉臂式垃圾车工作装置的优化设计。
首先,拉臂的结构和性能是影响垃圾车工作效果的关键因素,因此在优化设计中需要考虑以下几个方面。
首先,要确保拉臂的稳定性和承载能力。
拉臂在工作过程中需要承载垃圾桶的重量,并且还要保持平衡和稳定,因此其结构设计要合理,并且采用高强度材料制造,以确保其承载能力和使用寿命。
其次,拉臂的长度和转角要合理。
拉臂的长度应能够满足垃圾桶的放置和收集需要,并且要有较大的转角范围,以方便在狭窄的道路上操作。
最后,拉臂的操作机构要设计得简单易用,并且要具备高效的工作性能。
例如,可以采用液压驱动系统,提高工作效率和稳定性。
其次,垃圾桶的设计也是优化垃圾车工作装置的重要环节。
垃圾桶的设计要考虑到以下几个方面。
首先,垃圾桶的容量要适中,既要能够满足垃圾的收集需要,又要考虑到车辆空间的限制。
其次,垃圾桶的密封性要好,以防止垃圾溢漏和异味扩散。
同时,垃圾桶的材料也要具备耐腐蚀和耐磨损的特性,以保证其使用寿命和卫生。
最后,在优化设计中,液压系统的性能和稳定性也是需要考虑的重要因素。
液压系统在垃圾车的工作过程中起到了关键的作用,因此设计要求较高。
首先,液压系统的功率和响应速度要高。
拉臂的伸缩和悬浮功能都需要液压系统来支持,因此需要确保其具备足够的动力和迅速的响应速度。
其次,液压系统的稳定性要好。
在垃圾车工作的过程中,液压系统需要长时间持续工作,因此设计要考虑到系统的热稳定性和耐久性。
综上所述,拉臂式垃圾车工作装置的优化设计需要考虑拉臂、垃圾桶和液压系统的结构和性能。
通过合理设计和使用高性能材料,以及优化液压系统的性能和稳定性,可以提高垃圾车的工作效率和可靠性,从而更好地满足城市环卫的需求。
ZL50轮式装载机总体及工作装置设计
摘要装载机属于铲土运输机械类,是一种通过安装在前端一个完整的铲斗支撑结构和连杆,随机器向前运动进行装载或挖掘,以及提升、运输和卸载的自行式机械。
它广泛用于公路、铁路、建筑、水电、港口和矿山等工程建设。
装载机具有作业速度快、效率高、机动性好、操作轻便等优点,因此成为工程建设中土石方施工的主要机种之一,对于加快工程建设速度,减轻劳动强度,提高工程质量,降低工程成本都发挥着重要的作用,是现代机械化施工中不可缺少的装备之一。
这次设计采用先进的现代设计方法,对这种轮式装载机工作装置进行了总体设计到零部件设计。
主要包括轮式装载机工作装置的关键零部件,如铲斗、连杆机构以及转斗油缸、举升油缸等,并对重要零件进行了刚度、强度分析。
应用CAXA软件对轮式装载机工作装置整体进行设计。
关键词:装载机;机械化;工作装置AbstractLoader of soil belonging to the transport machinery,Through the installation of a front-end in a bucket full support structure and linkage, Random forward movement for loading or excavation, And the upgrading, transportation and unloading of self-propelled machinery. It widely used in highway, railway, construction, utilities, ports and mines, and other construction projects. Loader is operating speed, high efficiency, good mobility, the advantages of operating the Light, So as the construction of earth and stone in the construction of one of the main machine, speed up the construction speed and reduce labor intensity and improve quality, lower costs of the project has played an important role in the construction of a modern mechanized equipment indispensable one.The design of the modern use of advanced design methods, wheel loaders working on such a device design to design components. Wheel Loader work includes installation of critical components, such as the bucket, linkage and the fuel tank to the bucket, lifting the oil tanks, and carry out important parts of the stiffness, strength analysis. Application of CAXA software installed on the wheel loader work for the overall design and its use of this design three-dimensional display of expression.Keywords:Loader;Mechanization;Work-Equipment目录1绪论 (1)1.1 轮式装载机概述 (1)1.1.1 装载机简介 (1)1.1.2 装载机的主要技术性能参数 (1)1.1.3 装载机的用途 (3)1.1.4 装载机的分类 (3)1.2 装载机应用技术发展 (4)1.2.1 国外装载机发展现状 (4)1.2.2 国外装载机发展趋势 (5)1.2.3 国内装载机发展现状 (5)1.2.4 国内装载机发展趋势 (5)2 装载机工作装置总体设计 (6)2.1 工作装置的总体结构与布置 (6)2.2 工作装置连杆机构的结构形式与特点 (8)2.3 工作装置自由度的计算 (13)2.4 工作装置总体设计 (15)3 ZL50 装载机工作装置设计 (16)3.1 工作装置的设计要求 (16)3.1.1 工作装置工作性能 (16)3.1.2 对工作装置的要求 (16)3.2 铲斗设计 (16)3.2.1 铲斗的结构形式 (17)3.2.2 铲斗的分类 (19)3.2.3 铲斗断面形状和基本参数确定 (20)3.2.4 铲斗容量的计算 (23)3.3 工作装置连杆系统设计 (24)3.3.1 机构分析 (24)3.3.2 尺寸参数设计 (25)3.3.3 连杆系统运动分析 (31)3.4 工作装置静力学分析及强度校核 (35)3.4.1 静力学分析 (35)3.4.2 强度校核 (41)3.5 液压缸设计 (43)3.5.1 液压缸的类型和结构 (43)3.5.2 液压缸基本参数设计 (43)4 结论 (46)5 技术经济分析 (47)6 致谢 (48)参考文献 (49)附录A (50)附录B (57)1绪论1.1 轮式装载机概述1.1.1装载机简介装载机属于铲土运输类的机械,是一种通过安装在前端的一个完整的铲斗用来支撑结构和连杆,随着机器向前运动并进行装载或挖掘,以及提升、运输和卸载的自行式的履带或轮胎机械设备。
轮式装载机动臂举升油缸缓冲特性探讨
效 越突 出; 而 , 然 当缓 冲终 了 时 , 时 的 活塞仍 具 有 一 此 定 的运 动速度 , 常称 之 为 残余 运 动 速 度 。残余 运 动 通 速 度 的存在会 造 成一 定 程 度 的 负面 影 响 , 即引起 举 升 油 缸缸 体 的颤振 , 破坏 举 升 油 缸 腔 内 的密 封性 能及 正
铲斗 在插入 料堆 的 同时举升 动臂 的状态 最 为恶劣 和不
动臂 举升 油缸 在装载机 的整个工 作循环 中起 着 十 分重 要 的作用 , 操作 人 员 为 了提 高 整个 装 运 工 作 的效 率 , 常要 求 提高举 升油 缸 的活塞运 动速 度 , 往复运 经 此 动 的速度 时常会 达 到 每 秒几 十米 。然 而 , 塞 如 此 高 活 频地 来 回运 动 往 往 会 造 成 整 台机 器 的剧 烈 冲击 与 振 动 , 得驾 驶 员过早 地产 生疲 劳 , 响 了人 机整 个 系统 使 影
动 到终 点时 , 排油 腔 的油液通 过 节 流小 孑 或节 流缝 将 L
某 个 合 理 范 围 内 , 般 情 况 下 缓 冲 行 程 可 选 择 在 一
X 一( . 4 . 7 D 范 围 内较 为合 理 。 O 1 ~0 1 )
3 结 论
ห้องสมุดไป่ตู้
隙排 出,增 大排 油阻力 ,使 被 封 闭 的油 液 产生 缓 冲 压 力 , 而使 活塞 均 匀 减 速 、 动 , 能撞 击 油 缸 缸 盖 。 从 制 不 第 一种类 型 的缓 冲装 置 在缓 冲过 程 中, 由于 其 节 流 面 积不 变 , 故在缓 冲 开始 时 , 生 的缓 冲制 动力 很 大 , 产 但
突变 , 出现超 出规 定 的压力 峰值 ; ③整 个缓 冲腔 内的最 大 压力值 应 该不超 过 油泵 供 油 压 力 的 1 5倍 ; 缓 冲 . ④
对轮式装载机的检测标准的几点修改意见
对轮式装载机的检测标准的几点修改意见1 工作装置动作时间为提高轮式装载机的技术性能,缩短与国外轮式装载机的性能指标差距,工程机械标委会组织对轮式装载机的分等标准、基本参数等进行了修订。
原JB3688.1--1894现已修订为JB/T3688.1--1896,新标准中规定的指标较原标准有明显提高,无疑是对整机性能的提高发挥了重要的指导作用,,对于工作装置动作时间,例如3t和4t级装载机的铲斗提升时间,新标准由原8s改为6.5s,总和时间(三项和)由15.5s改为12s;5t级装载机的提升时间由8.5s改为7s,总和时间由16s改为13s。
提高后的基本参数指标是JB/T51026.1--1993《轮胎式装载机产品质量分待质量指标》优待品指标,而该分等标准中规定的工作装置动作时间的合格品,一等品指标在JB/T3688.1--1996中被视为不全格项(见表1)。
三项和作为标定和考核整机作业效率的重要指标,规定过低会限制产品水平的提高,但作为行业标准规定过高也会失去指导意义。
近年来,装载机行业通过工作装置的优化设计和液压系统及元件的不断改进,三项和指标有了很大提高,如徐州装载机厂的ZL40E装载机三项和为11s。
装载机质量分等标准已不能满足产品发展的需要,建议相对提高JB/T51026.1--1993中工作装置运行时间指标,并对JB/T3688.1--1996中的该项指标适当放宽(建议基本参数采用JB/T51026.1一等品指标)。
2 液压缸的沉降量液压缸的沉降量是影响装载机工作装置性能的一个重要指标,在原JB/T3688系统列标准中对翻斗缸和动臂缸的沉降量没有给出限值,出厂检验,周期检验也没有要求;对其测定方法在JB/T3688.3中能出两种方法,静测时铲斗内加额定载重量,动臂提升到最高位置,铲斗后翻,发动机熄火,分配阀封闭,然后测量动臂缸与翻斗缸活塞杆的外伸长度,时间间隔15min、延续3h。
动测此处从略。
毕业设计说明书-装载机
毕业论文﹙设计﹚说明书题目轮式装载机机械结构设计学生姓名冯中苗学号 **********所在院(系) 机械工程学院专业班级机自 072指导教师梁杨2011年 6月1日轮式装载机机械结构设计冯中苗(陕理工机械工程学院机械设计制造及其自动化专业072班,陕西汉中723003)指导教师:梁杨[摘要]:装载机是一种用途较广的施工机械,对加快工程建设速度,减轻劳动强度,提高工程质量,降低工程成本都发挥着重要的作用。
因此,近几年来,无论在国内还是在国外,装载机品种和产量都得到了迅速发展,已成为工程机械的主导产品之一。
目前,国内设计工作装置的方法有三种,即类比作图试凑法、优化设计法和解析法。
最常用的设计方法是类比作图试凑法,这种方法盲目性大,需多次作图试凑,工作量很大,而且设计精度较差。
个别单位也开始采用解析法和优化设计方法,但使用效果并不理想,仍然未能全面解决卸料性与平移性、动力性与铲斗自动放平性之间的矛盾。
本次毕业设计对装载机工作装置的设计进行了初探性探讨,并在解决上述问题上做了一定的文章。
[关键词]:装载机,自动放平,工作装置Mechanical design wheel loaderFeng zhong miao(Grade07,Class2,Major machine design manufacture and autormation,School of Mechanical Engineering,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor: liang yang[ABSTRACT]:The loader is one kind of use widely construction machinery, to speeds up the engineering construction speed, reduces the labor intensity, improves the project quality, reduces the project cost all to play the vital role. Therefore , in the last few years, regardless of in home or in overseas, the loader variety and the output all obtained the rapid development, has become one of project machinery leading products. At present, the domestic design work installment method has three kinds, namely analogy mapping trial collecting method, optimized design law and analysis law. The design method that most commonly used is the analogy mapping trial collecting method, but existing big blindness, it must try to do many times, and loading work is very big, moreover the design precision is worse. The individual company also starts to use the analysis law and the optimized design method, but the effect is not certainly ideal, it still has not been able comprehensively to solve unloading and translation, the power and the scoop automatically puts unevenness between the contradiction. This graduation design has carried on initially the searching discussion to the loader work installment design, and has made the certain issue in the solution above question.[KEY WORDS] : Loader , Automatically put , Work installment目录前言 (1)第一章装载机总体设计 (2)1.1装载机的分类和总体构造 (2)1.1.1装载机分类 (2)1.1.2装载机的主要技术性能参数 (2)1.1.3载机总体构造 (3)1.2装载机机型的选择和总成结构形式的选择 (3)1.2.1总体方案的选择 (3)1.2.2整机底盘各部件的型式初选 (4)1.3 总体参数的确定及估算 (7)1.3.1总体参数初选 (7)1.3.2工作阻力的计算 (7)1.4装载机总体受力分析 (11)第二章装载机的稳定性计算 (19)2.1总体设计计算 (19)2.2轮荷轴荷计算 (20)2.3整机稳定性计算 (21)2.4掘起力的计算 (23)第三章装载机工装设计 (24)3.1概述 (24)3.2结构形式选择 (24)3.3工作装置的结构设计 (26)3.3.1铲斗设计 (26)3.3.2动臂及杆结构的设计 (31)第四章工作装置的强度校核计算 (42)4. 1工作装置的强度计算包括: (42)4. 2计算位置的确定: (42)4. 3计算工况与外载荷的确定 (42)4.3.1计算工况的确定 (42)4.3.2外载荷的确定 (44)4.4工作装置的受力分析与强度校核 (47)4.4.1.工况A的受力计算 (47)4.4.2动臂的强度计算 (48)4.4.3工况B载荷的确定 (51)4.4.4摇臂强度校核 (52)4.4.5连杆强度校核 (52)4.4.6.铰销校核 (52)第五章液压系统设计 (54)5.1工作油缸压力,行程的计算 (54)5.1.1 转斗油缸作业力的确定: (54)5.1.2动臂油缸作业力的确定(见图) (55)5. 2油泵的选择 (56)5.3系统压力的选择 (56)5. 4液压系统型式的选择 (56)致谢 (57)参考资料 (58)外文翻译 (59)前言装载机是一种用途较广的施工机械,对加快工程建设速度,减轻劳动强度,提高工程质量,降低工程成本都发挥着重要的作用。
ZL50型装载机动臂结构的拓扑优化设计
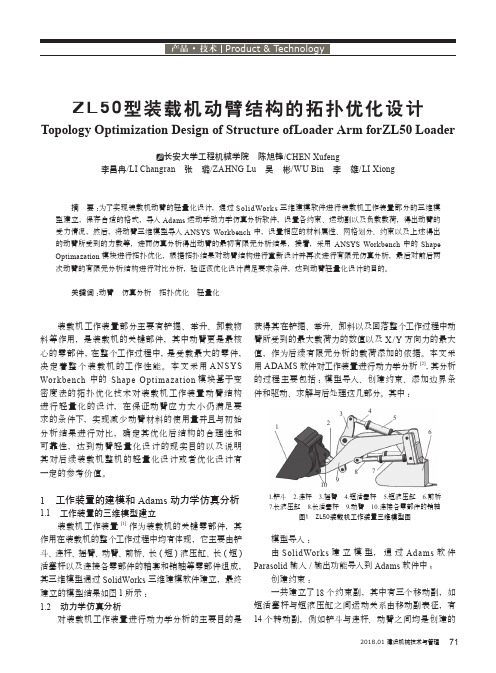
712018.01建设机械技术与管理装载机工作装置部分主要有铲掘、举升、卸载物料等作用,是装载机的关键部件,其中动臂更是最核心的零部件,在整个工作过程中,是受载最大的零件,决定着整个装载机的工作性能。
本文采用A NS YS Workbench 中的 Shape Optimazation 模块基于变密度法的拓扑优化技术对装载机工作装置动臂结构进行轻量化的设计,在保证动臂应力大小仍满足要求的条件下,实现减少动臂材料的使用量并且与初始分析结果进行对比,确定其优化后结构的合理性和可靠性,达到动臂轻量化设计的现实目的以及说明其对后续装载机整机的轻量化设计或者优化设计有一定的参考价值。
1 工作装置的建模和Adams 动力学仿真分析1.1 工作装置的三维模型建立装载机工作装置[1]作为装载机的关键零部件,其作用在装载机的整个工作过程中均有体现,它主要由铲斗、连杆、摇臂、动臂、前桥、长(短)液压缸、长(短)活塞杆以及连接各零部件的轴套和销轴等零部件组成,其三维模型通过SolidWorks 三维建模软件建立,最终建立的模型结果如图1所示:1.2 动力学仿真分析对装载机工作装置进行动力学分析的主要目的是获得其在铲掘、举升、卸料以及回落整个工作过程中动臂所受到的最大载荷力的数值以及X /Y 方向力的最大值,作为后续有限元分析的载荷添加的依据。
本文采用ADAMS 软件对工作装置进行动力学分析[2],其分析的过程主要包括:模型导入、创建约束、添加边界条件和驱动、求解与后处理这几部分。
其中:摘 要:为了实现装载机动臂的轻量化设计,通过SolidWorks 三维建模软件进行装载机工作装置部分的三维模型建立,保存合适的格式,导入Adams 运动学动力学仿真分析软件,设置各约束、运动副以及负载载荷,得出动臂的受力情况,然后,将动臂三维模型导入ANSYS Workbench 中,设置相应的材料属性、网格划分、约束以及上述得出的动臂所受到的力载等,进而仿真分析得出动臂的最初有限元分析结果,接着,采用 ANSYS Workbench 中的 Shape Optimazation 模块进行拓扑优化,根据拓扑结果对动臂结构进行重新设计并再次进行有限元仿真分析,最后对前后两次动臂的有限元分析结构进行对比分析,验证该优化设计满足要求条件,达到动臂轻量化设计的目的。
弹齿滚筒式捡拾装置运动学特性的理论分析

2 机构 的力学模 型简化
取 捡拾 装 置整 体 为研 究 对 象 , 可 以将 现 有 的 捡 拾 装 置抽 象 为 以下 的力 学模 型 。
通讯作 者 :郁 志宏 ( 1 9 6 6 一 ) , 女, 河北邢台人, 教授 , 硕士生导 师,
( E— m a i l ) y z h y q y z h y q @1 2 6 . c a m。
・
76 ・
2 0 1 5年 1 0月
I v
农 机 化 研 究 筒 圆周上 的节 点 , 为
( — ) + ( y —Y ) = f
型, 然后 运 用数 学 分 析 方 法 推 导 出 一 套 计 算 公 式 , 从
而形成一套理论设计方法 , 旨在指导捡拾装置 的设计 工作 。
1 问题 的提 出
现 在牧 业 机 械 上 广 泛 使 用 的 弹 齿 滚 筒 式 捡 拾 装
置如图 1 所示。
收 稿 日期 :2 0 1 4 —1 0 — 2 2
本 文 提 出一 套捡 拾 装 置 运 动 学特 性 的理 论 方 法 ,
其思 路 是 : 将 实 际捡 拾 装 置 的 机 械结 构 抽 象 为 力 学模
各 机 型 的不 同 点是 其 凸轮 轨 道 的 曲线 形 状 不 同 。
有 的机 型是 心 形 线 , 有 的机型是豆形线 ; 但 不 论 是 心 形线 , 还 是 豆形 线 , 都 是 由若 干段 圆弧 或 直线 构 成 。 现有 文献 在 理论 分 析 时 , 都 是 抽 象 地 利 用 凸轮 摆 角推 导 出 弹齿 端部 的位 移 方 程 … , 或 是 用 复 杂 的 数 学 公式 加 以表 示 J 。在 文献 [ 1 ] 中, 作 者把 弹 齿 相对 滚 筒 的摆 动用 凸轮摆 角 表 示 , 但 凸轮 摆 角 的作 用 并 没 有 明确 指 出 , 也 没有 给 出 具 体 的计 算 公 式 。在 文 献 [ 2] 和 文献 [ 3 ] 中, 作 者 也 是 把 弹 齿 相 对 滚 筒 的摆 动 用 弹 齿杆 相 对摆 动规 律 作 为 角 度参 数使 用 , 且 其 具 体 数 值
《2024年轮式起重机起升液压系统中阻尼对动静态特性影响的研究》范文

《轮式起重机起升液压系统中阻尼对动静态特性影响的研究》篇一一、引言随着工程机械的不断发展,轮式起重机因其出色的移动性和起升能力在建筑、道路、桥梁等工程领域得到了广泛应用。
在轮式起重机的起升液压系统中,阻尼作为一种重要的物理特性,对系统的动静态特性具有显著影响。
本文旨在研究轮式起重机起升液压系统中阻尼对动静态特性的影响,以期为提高系统性能和优化设计提供理论依据。
二、阻尼在液压系统中的作用阻尼在液压系统中主要起到减少振动、平稳运行和提高系统稳定性的作用。
在轮式起重机的起升液压系统中,阻尼能够有效地减小起升过程中的冲击和振动,保证系统的平稳运行。
此外,阻尼还可以提高系统的稳定性,使其在面对外界干扰时能够迅速恢复平衡状态。
三、阻尼对动静态特性的影响1. 对动态特性的影响阻尼对轮式起重机起升液压系统的动态特性具有显著影响。
在起升过程中,阻尼能够有效地减小系统的振动和冲击,提高系统的动态响应速度和稳定性。
此外,适当的阻尼还可以降低系统在高速起升过程中的噪声和温度升高,提高系统的使用寿命。
2. 对静态特性的影响阻尼对轮式起重机起升液压系统的静态特性同样具有重要影响。
在系统处于静止状态时,阻尼能够有效地防止系统在受到外界干扰时发生位移或变形。
此外,阻尼还可以提高系统的承载能力和稳定性,保证系统在静载工况下的安全性和可靠性。
四、研究方法与实验设计为了研究阻尼对轮式起重机起升液压系统动静态特性的影响,本文采用理论分析和实验研究相结合的方法。
首先,建立系统的数学模型,分析阻尼对系统动静态特性的影响机理。
然后,设计实验方案,通过实验数据验证理论分析的正确性。
实验过程中,需严格控制实验条件,保证数据的可靠性和有效性。
五、实验结果与分析1. 动态特性实验结果与分析通过动态特性实验,我们发现适当增加阻尼可以显著提高轮式起重机起升液压系统的动态响应速度和稳定性。
同时,减小了系统在起升过程中的振动和冲击,降低了噪声和温度升高。
然而,过大的阻尼反而会导致系统响应速度变慢,影响起升效率。
学术论文:(毕业设计论文)《ZL60轮式装载机总体设计》
〔毕业设计论文〕?ZL60轮式装载机总体设计?摘要装载机属于铲土运输机械类,是一种通过安装在前端一个完整的铲斗支承结构和连杆,随机器向前运动进行转载或挖掘,以及提升、运输和卸载的自行式履带或轮胎机械。
它广泛用于公路、铁路、建筑、水电、港口和矿山等工程建设。
装载机具有作业速度快、效率高、机动性好、操作轻便等优点,因此成为工程建设中土石方施工的主要机种之一,对于加快工程建设速度,减轻劳动强度,提高工程质量,降低工程本钱都发挥着重要的作用,是现代机械化施工中不可缺少的装备之一。
近年来,随着建筑施工和资源开发规模的扩大,对工程机械需求量迅速增加,因而对其可靠性、维修性、平安性和燃油经济性也提出了更高的要求。
自20世纪以来,国外工程机械进入了一个新的开展时期,在广泛应用新技术的同时,不断涌现出新结构和新产品。
总体设计又是装载机设计中一个重要环节,该环节对装载机的性能起着决定性的影响,因此以ZL60轮式装载机为研究对象的总体设计是本课题内容。
关键词:轮式装载机;总体设计;总体布置;匹配;AbstractShovel loader belongs to the transport machinery. It is self-propelled crawler or tire machine by installing a full supporting structure ofbucket and linkage in the front of it, which can move forward to transship or excavate, upgrade, transport and unload along with the machine. It is widely used in highway, railway, construct, hydroelectric power, port,mine and other projects. Loaders have some advantages which have high operating speed, high efficiency, good mobility, easily operation and so on. Therefore, loader becomes one of the major machines in the earth and rock work of engineering construction. It is one of the indispensable equipment in modern mechanical construction which plays a important rolein accelerating the construction speed, reducing labor intensity,improving the quality of the project, and reducing the cost of the project.In recent years, with the enlargement of the scale of construction and resource development, and rapid increased demand for construction machinery, higher requirements relat ed to machinery’ reliability, maintainability, safety and fuel economy have also been put forward. Since the 20th century, foreign construction machinery has entered a new periodin which new technology is widely used, and at the same time the newstructures and new products are emerging constantly.Because overall design is an important part of loader design, which plays a decisive impact on the performance of the loader, the content of the research is overall design of ZL60 wheel loader as a study object.Key Words: wheel loaders; overall design; general layout; matching目录 TOC \o "1-3" \h \z \ul "_Toc262984810" 1 绪论 REF _Toc262984810 \h 1l "_Toc262984811" 1.1国内轮式装载机开展现状及趋势 REF _Toc262984811 \h 1l "_Toc262984812" 1.2 轮式装载机新技术开展特点 REF _Toc262984812 \h 2l "_Toc262984813" 1.3 论文主要研究内容 REF _Toc262984813 \h 2l "_Toc262984814" 2 总体设计的原那么及主要内容 REF _Toc262984814 \h 4l "_Toc262984815" 2.1 工程机械设计原那么REF _Toc262984815 \h 4l "_Toc262984816" 2.2 工程机械总体设计的主要内容 REF _Toc262984816 \h 4l "_Toc262984817" 3 ZL60轮式装载机总体参数确实定 REF _Toc262984817 \h 6l "_Toc262984818" 3.1发动机的功率 REF _Toc262984818 \h 6l "_Toc262984819" 3.1.1运输工况 REF _Toc262984819 \h 7l "_Toc262984820" 3.1.2插入工况 REF _Toc262984820 \h 7l "_Toc262984821" 3.2自重力 REF _Toc262984821 \h 8l "_Toc262984822" 3.3掘起力 REF _Toc262984822 \h 9l "_Toc262984823" 3.4 最大驱动力 REF _Toc262984823 \h 9l "_Toc262984824" 3.5铲斗后倾角及卸载角 REF _Toc262984824 \h 10l "_Toc262984825" 3.6行驶速度和档位数 REF _Toc262984825 \h 10l "_Toc262984826" 3.7装载机作业阻力 REF _Toc262984826 \h 10l "_Toc262984827" 3.7.1插入阻力Px REF _Toc262984827 \h 10l "_Toc262984828" 3.7.2铲起阻力 REF _Toc262984828 \h 11l "_Toc262984829" 3.7.3转斗阻力矩 REF _Toc262984829 \h 12l "_Toc262984830" 3.8铲斗的最大卸载高度Hmax与卸载距离S REF_Toc262984830 \h 12l "_Toc262984831" 3.9最小离地间隙 REF _Toc262984831 \h 12l "_Toc262984832" 4 ZL60轮式装载机总体设计 REF _Toc262984832 \h 14l "_Toc262984833" 4.1发动机 REF _Toc262984833 \h 14l "_Toc262984834" 4.2传动系各零部件结构型式的选择 REF _Toc262984834 \h 14l "_Toc262984835" 4.2.1液力变矩器 REF _Toc262984835 \h 14l "_Toc262984836" 4.2.2变速器 REF _Toc262984836 \h 17l "_Toc262984837" 4.2.3驱动桥 REF _Toc262984837 \h 17l "_Toc262984838" 4.3 转向系 REF _Toc262984838 \h 17l "_Toc262984839" 4.4制动系 REF _Toc262984839 \h 17l "_Toc262984840" 4.5轮胎 REF _Toc262984840 \h 18l "_Toc262984841" 4.6工作装置 REF _Toc262984841 \h 18l "_Toc262984842" 4.7转向与工作液压系统 REF _Toc262984842 \h 18l "_Toc262984843" 5 ZL60轮式装载机的总体布置 REF _Toc262984843 \h 20l "_Toc262984844" 5.1发动机与传动系的布置 REF _Toc262984844 \h 21l "_Toc262984845" 5.2 铰接点和传动轴的布置 REF _Toc262984845 \h 23l "_Toc262984846" 5.3摆动桥的布置 REF _Toc262984846 \h 24l "_Toc262984847" 5.4驾驶室的布置 REF _Toc262984847 \h 25l "_Toc262984848" 5.5 转向系的布置 REF _Toc262984848 \h 25l "_Toc262984849" 5.6 工作装置的布置 REF _Toc262984849 \h 26l "_Toc262984850" 5.7 各运动部位校核要求 REF _Toc262984850 \h 26l "_Toc262984851" 5.8桥荷分配和重心位置的计算与调整 REF _Toc262984851 \h 26l "_Toc262984852" 6 ZL60轮式装载机液压油箱的设计 REF _Toc262984852 \h 30l "_Toc262984853" 6.1 油箱的功用 REF _Toc262984853 \h 30l "_Toc262984854" 6.2油箱容积确实定 REF _Toc262984854 \h 31l "_Toc262984855" 6.3 油箱的结构要点 REF _Toc262984855 \h 35l "_Toc262984856" 7 结论 REF _Toc262984856 \h 37l "_Toc262984857" 参考文献 REF _Toc262984857 \h 38l "_Toc262984858" 附录39l "_Toc262984859" 致谢401 绪论品种繁多的工程机械广泛应用于国民经济建设中的交通运输、能源、矿山、农、林、水利、市政建设和现代化国防建设事业中。
轮式装载机动臂液压缸动态刚度特性分析
2 数 学 模 型
阀控 动臂 液压 缸 系统 结 构 简 图如 图 2所示 , 假
定:
( 阀对于阀芯位移和阀压力变化所产生的流 1 )
量 变化 能瞬 间反 应 , 阀具 有理想 的响应 能力 ; 即
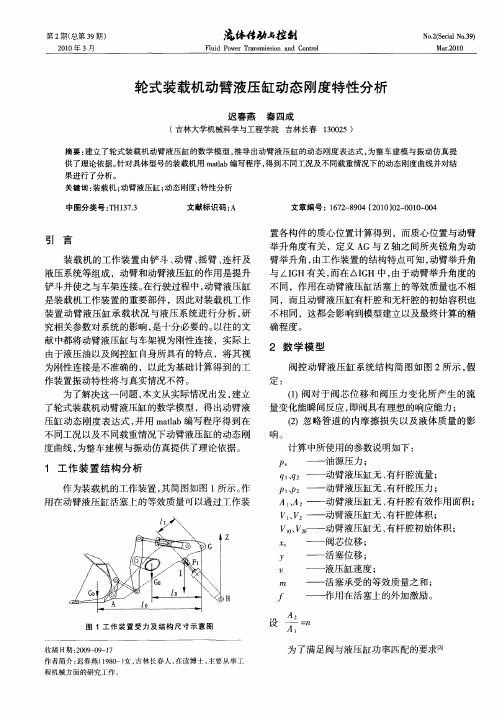
1 工 作装 置 结 构 分 析
作为装载机的工作装置 , 其简图如图 1 所示。 作 用在动臂液压缸活塞上的等效质量可以通过工作装
gip = 》 rp2 A cl) ( - c - 2 I ( p q) 2; 亭z
置各构件的质心位置计算得到,而质心位置与动臂 举升 角度有 关 ,定义 A G与 z轴 之 间所夹 锐角 为动 臂举 升角 , 由工作 装置 的结构 特点 可知 , 臂举 升角 动 与 /I H有关 , G 而在 AIH 中 , G 由于动臂 举 升角度 的 不同,作用在动臂液压缸活塞上的等效质量也不相 同 ,而且动臂 液压 缸有杆 腔 和无 杆 腔的初始 容积 也 不相 同 ,这都 会影 响到模 型建 立 以及 最终计 算 的精 确 程迟 春燕等 : 轮式装载机动臂液压动态刚度特性分析
+
c + 4
+
将阀的流量方程线性化 , 并带人负载流量方程得 : 吼 K目 一Kc L P —K () 2
其 中 : 量增益 : 流
图 2 动 臂 液压 缸 结 构 示 意 图
=
=
。
K q 2
Z
H
f 忽略管道的 内摩擦损失 以及液体质量的影 2 ) 响。 计算中所使用的参数说明如下: P — —油 源压力 ; q、 — —动 臂液 压缸无 、 q 有杆 腔流量 ; P、 — —动 臂液 压缸无 、 P 有杆 腔压力 ; 动臂液压 缸无 、 有杆 腔有效 作用 面积 ; 动臂 液压 缸无 、 有杆 腔体积 ; 。 — _动臂 液压 缸无 、 、 有杆 腔初始 体积 ; Xv — — 阀芯位移 ; Y —— 活 塞位移 ; 液压 缸速 度 ; m —— 活塞 承受 的等效 质量 之和 ; 厂 ——作 用 在活 塞上 的外 加激 励 。
基于整车动力学的轮式装甲车动力装置减振优化

华 中 科 技 大 学 硕 士 学 位 论 文摘要轮式装甲车作为现代战争的重要武器装备之一,其服役状态下的振动是制约武器瞄准精度、限制车辆机动性、影响乘坐舒适性的关键。
我国现有轮式装甲车的由于振动问题与欧美发达国家存在差距。
开展轮式装甲车的振动建模及减振优化,是提升装甲车的作战性能的重要举措。
本文针对动力装置原有减振性能不足的问题,通过整车振动建模与分析,提出动力装置减振优化设计方法和系统减振解决方案。
首先,针对轮式装甲车复杂结构系统,根据整车振动分析需要提出了刚柔耦合的系统振动建模策略;建立了车身复杂壳体结构的柔体模型,以及悬架系统、动力装置减振系统等主要子系统的参数化振动模型,完成了关键单元的动力学参数辨识;基于命令流的方式构建了规模合理、适用于整车振动分析和优化的轮式装甲车刚柔混合振动模型。
其次,结合轮式装甲车动力装置工况负载变化范围大、振动位移幅值限制严格的特点,探讨其动力装置减振性能评价方法,构建了动力装置减振性能评价体系;针对动力装置原有减振方案开展了整车振动分析,阐明了减振器参数和位置对动力装置减振性能的影响规律。
结果表明,对于动力装置原有减振方案,即使进行位置优化也无法满足轮式装甲车的减振性能要求,为此必须对动力装置减振方案进行优化设计。
最后,针对轮式装甲车的减振性能要求和位置偏移限制,提出了动力装置减振器的刚度和位置优化方法;开展了减振器变刚度特性优化分析,提出了并联预紧弹簧负刚度机构的新型高承载、低刚度动力装置减振器构型;结合减振性能和振幅限制要求开展了减振器的位置优化。
进一步基于整机振动模型,分析了动力装置减振优化后的减振性能和不同工况负载下的稳态位移,结果表明在允许的稳态位移限制下,优化后的振动传递率较原方案降低10dB。
关键词:轮式装甲车动力装置振动建模减振华 中 科 技 大 学 硕 士 学 位 论 文AbstractWheeled panzer serves as one of the most important weapons for modern warfare. The vibration under working conditions is the key which decreases the accuracy of weapon targeting, the mobility of vehicles and the riding comfortability of wheeled panzer.The current wheeled panzer in our country have great shortage in these performance when compared with developed countries because of the insufficient vibration isolation. Therefore dynamic modeling and vibration isolation optimization for new wheeled panzer are critical to improve combat performance of panzers and strengthen our military.Aiming at the issues of vibration isolation of the powertrain mounting, by means of system vibration modeling and analysis, this thesis proposes a new design method and systematic solution for vibration isolation optimization of the powertrain mounting.Firstly, based on the complex structure of wheeled panzers and the demand of the analysis of system vibration, a rigid-flexible coupled system vibration modeling strategy was proposed. According to the modeling strategy, flexible modeling of the vehicle body and the parametric vibration modeling of essential subsystems such as suspension system and power system are completed and dynamic parameter identification of key components are performed. Then, a new wheeled panzer’s rigid-flexible coupled vibration model is built to perform vibration analysis and optimization.Secondly, vibration performance evaluation method of the powertrain mounting is proposed, with concerning large amplitude of load variation and strict space restriction of engine displacement. Systematic vibration analysis was carried out based on the original vibration reduction scheme of the powertrain mounting. And the influence of the isolator parameters and position on the vibration isolation performance of the powertrain mounting was clarified. The result shows that the original vibration reduction scheme has poor vibration isolation performance and the location optimization is unable to satisfy the isolation performance requirement of the new wheeled panzers, and therefore further optimization is in desperate need.Lastly,the stiffness and position optimization strategies for the power mount are proposed to meet the vibration isolation performance requirements and position-displacement limitations of the new wheeled. The optimization analysis of the variable华 中 科 技 大 学 硕 士 学 位 论 文stiffness characteristics of absorbers is carried out and the new type of damper with preload spring negative stiffness mechanism in parallel is designed to obtain the high load and low stiffness at the same time. The dampers’ position optimization was carried out according to vibration isolation requirement and amplitude limitation.Based on the vibration model of the whole machine, the damping performance of the power mount after vibration optimization and the steady displacement under different load conditions are analyzed. Results show that within the displacement limitation, the optimized vibration transmissibility is reduced by 10 dB compared with the original scheme.Key Words: Wheeled panzer, Powertrain, Vibration modeling, Vibration isolation华 中 科 技 大 学 硕 士 学 位 论 文目录摘要 (I)Abstract ....................................................................................................................... I I 1. 绪论 (1)1.1 课题来源、背景和意义 (1)1.2 国内外研究现状 (2)1.3 本文研究内容与章节安排 (9)2. 整车系统振动建模 (11)2.1 引言 (11)2.2 某型装甲车系统结构与建模策略 (11)2.3 关键子系统建模 (14)2.4 关键子系统参数辨识 (24)2.5 整车振动建模 (28)2.6 小结 (31)3. 整车振动特性分析与关键影响因素研究 (32)3.1 引言 (32)3.2 振动性能的评价体系 (32)3.3 整车系统振动特性分析 (34)3.4 动力装置减振系统对振动特性的影响 (37)3.5 小结 (48)4. 基于系统振动模型的动力装置减振系统优化 (49)4.1 引言 (49)4.2 优化技术路线 (49)4.3 减振器单元参数匹配优化 (50)4.4 减振器布置位置优化 (61)4.5 基于新型减振器的动力装置减振特性分析 (68)4.6 小结 (73)华 中 科 技 大 学 硕 士 学 位 论 文5. 总结与展望 (75)5.1 全文总结 (75)5.2 展望 (76)致谢 (77)参考文献 (78)华 中 科 技 大 学 硕 士 学 位 论 文1.绪论1.1课题来源、背景和意义1.1.1课题来源本课题来源于国家自然科学基金重点项目“纳米精度加工装备关键部件运动稳定性的基础研究”(编号:51435006)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮式拾装机动臂举升能力特性优化设计Optimal design of lifting capacity of the wheeled pickup设计与研究Design and Research____________________________________________谢帮亮(泉州鑫豪工程机械科技有限公司,福建泉州362256)摘要:轮式拾装机以举升作业为主,对动臂的举升能力及平稳性的要求比轮式挖掘机更高。
文中重点 对某型轮式拾装机动臂、回转平台、动臂油缸之间的铰点及其油缸相关参数进行优化设计,建立分析计算的几何模型和力学模型,评估相关几何参数和力学参数对动臂举升能力及其平稳性的影响。
通过对动臂、斗杆在最远状态的典型工况下的动臂举升能力进行优化设计,使动臂举升能力及其平稳性得到了明显改善,计算方法简洁,具有重要的工程实用价值。
关键词:轮式拾装机;动臂举升能力;平稳性;优化设计中图分类号:TH248、TU621 文献标识码:A文章编号:1005-1937(2016)02-014-04轮式拾装机是近年来由小型轮式挖掘机发展起 来的一种广泛应用的多用途装卸机械,通过工作装 置的复合动作实现对地面物料的举升、移动、装卸 等作业。
由于其作业效率高,目前在甘蔗、木材、条形石料等的装卸领域应用非常广泛。
轮式拾装机 的工作装置一般包括动臂、斗杆、抓夹及其相关附 件。
虽然轮式拾装机总体结构与轮式挖掘机相同,但其以举升作业为主,因此对动臂的举升能力及其 平稳性与轮式挖掘机的要求有所不同。
为此本文提 出一种轮式拾装机动臂提升能力及其平稳性的优化 设计方案,以提高整机的作业能力和安全性。
1动臂运动模型分析1.1影响动臂运动摆角范围的相关参数分析由于动臂由绞接的回转平台上的动臂油缸推动而产生举升运动,如图1所示,三角形中ZACB,为:=arccos(式中:Q^arccosC15+11 ~11)(2)2/5/8连线与r,。
平面的夹角,(°)。
A W2、2V7(3)式中:《2—Z4C5,为结构角,(°)。
当动臂 与动臂油缸交接点5位于图示^连线左侧时,從2取 正值;位于右侧时,汉2取负值。
动臂摆角为动臂两端绞点CF连线与停机面的夹 角,即:l\ +/72-A2s^ = 0X -au -a2= arccos (----------)_a ii _a2 (4)2/5/7将动臂油缸最大长度代入式(4),得动臂的最 大仰角计算公式如下:A m a x =0_ail_a2 =3rCC0S(-2/5’7-)-a n-«2(5)0X= arccos (-+2/5/7(1)式中:b—动臂油缸活塞杆绞接点与缸体绞接点 距离,m m;I 5—动臂铰点与动臂油缸缸体绞接点距离,I7—动臂铰点与动臂油缸活塞杆绞接点距离式中:—动臂油缸最大伸缩长度,m m。
将动臂油缸最小长度代人式(4),得动臂的最大俯 角计算公式如下:=01-«11-«2 =arC C0S<:—,腿)-a…-〇2 (6 )式中:Ll m i n---动臂油缸最小伸缩长度,m m。
Design and Research 设计与研究动臂的摆角范围按下式计算:1.2影响动臂举升能力的参数分析由于心与汉n均为结构角,一旦三角形仙Y:形 状确定,则其值固定。
因此动臂摆角由动臂各铰点 的位置、动臂油缸铰点及动臂油缸长度所决定。
在实际工作中轮式拾装机主要是对物料进行举升、移动、装卸等作业,其作业要素更加贴近正 铲机构的作业特点,而正铲机构的动臂摆角范围为-50° ~75〇叫。
而一般小型轮式挖掘机的反伊机构 动臂摆角的范围为-52。
~ 45。
[12]〇由此可见,轮式拾 装机的摆角范围需要大于一般轮式挖掘机,因此按式 (4)需增大獅缸行程或调整綱的初始状态。
此外,动臂油缸作用力臂的大小及其变化规律 关系到动臂的举升力矩。
因此,动臂的举升能力也 涉及动臂机构的参数。
当绞点4、5、C确定后,举将优化前动臂铰点结构参数/7、/6、“,回转平台铰点结构参数/5、/4、/8,油缸结构参数 (见表1 )依次代人上述公式(1 )至 (7)可得计算结果为01=145° ,々lm ai=64°,^l m i n=-81° ,<2-11=62° ,»2=19° 〇表1优化前工作装置点位和油缸相关参数(计算结果保留整数)参数数值/m m参数数值/m mU3200/71288U341/8181.05U386^lm ai1620U2023.02^lm in9701.3.2优化后动臂运动摆角范围计算根据1.2中分析的结论,优化动臂举升能力的方法为适当增加/5的长度,增加动臂油缸行程,适当增加油缸工作压力(或油缸缸径),根据理论分析及实践统计结果,/5常为动臂油缸最短长度的0.5 ~ O.frf咅[2]0将优化后动臂铰点结构参数/7、/6、,回转平台铰接点结构参数/5、/4、/8,油缸结构参数i lrnai、L lm in(见表2 )依次代入上述公式(1)至(7 )可得计算结果为动臂摆角01=140° , 4>lm aX=72.36〇, (f)l m i n= -67.22°, l*-11=48° ,汉 2=19。
表2优化后工作装置点位和油缸相关参数参数数{t/mm参数数h3200/71288U321.8h285.3/5430.06^lm as1640U2023.02970升过程中的动臂油缸作用力臂^取决于动臂油缸的长私。
因此,要提高轮式拾装机的动臂举升能力,重 要的途径是增加/5的值,同时增加油缸行程,以保 持相当的动臂摆角及增大的值,适当增加油缸 工作压力或缸径,使其更加适合举升作业要求。
1.3某轮式拾装机动臂运动摆角范围计算1.3.1优化前动臂运动摆角范围计算e i=/1{ J2Z 2动臂举升能力优化计算模型分析2.1动臂举升能力的力学模型分析动臂油缸作用力臂的大小及其变化规律关系到 动臂的举升力矩是否满足要求,因此,当回转平台 铰点C、乂参数,动臂的铰接点5',續定后,动臂油 缸的作用力臂取决于动臂油缸的长度如图1,在三角 形中:y/ll,%2+ 2l52Lf + 2l72Lf -/54-/74-⑷设计与研究Design and Research如表2所示,拾装机适当增大动臂油缸行程,增大M数值,并将动臂结构角进行加大,为分析优 化前后拾装机的性能变化,参照挖掘机中关于提升 点和液压起重[3’4]的规定,将拾装机的提升点设为斗 杆上安装抓夹的销轴中心线上,拾装质量为动臂液压缸在提升点能够提升的载荷(不含铲斗或夹具、铲斗油缸、连杆、摇臂等)。
以拾装机型在斗杆油 缸全缩时,即斗杆在最远状态下的典型工况进行比 较,如图2所示(图在右边)。
M i=F i e i=^.[D f p0-(D f-d f)Pl1fl72+L f-l52^i、2/5/^ y(9)式中:—动臂油缸推力,kg; 721—动臂油缸数 目;A—动臂油缸缸径,m;d,—动臂油缸杆径,m;p。
—动臂油缸进油 压力,bar;仍---动臂油缸回油背压,bar。
工作装置部件自重对动臂铰接点C点所产生的 力矩和为[5]:11M•=-x■w i m w i(i〇)式中:M W i—某一姿态下工作装置部件自重对动臂 铰接点C所产生的力矩和;G W i—各部件重量,公式中取负值,kg;rw i—各部件重心位置对C点的力臂,m。
y=l~ 11按顺序依次代表动臂、斗杆等参与计算 的工作装置部件重量。
由此可得,拾装机的拾装质 量的计算公式可表示为:GLiMr Mm%(i i)式中:~~某一姿态下动臂的举升重量,kg;Ru—对应某一姿态下起吊点对于动臂铰接点 C点的力臂,m。
2.2优化前、后动臂举升能力的优化数据比较表3优化前、后油缸及动臂油缸工作压力相关参数 (下表计算时未考虑背压的影响)参数P t/b ai pj/bar乃i D Jm d jm^lm a x/m m/m m优化前数值优化后数值210230110.10.10.0550.05516201640970970根据表3可知,改善后的动臂油缸工作压力^增 加了20bar,油缸行程!^增加了20m m D为了更加 简明扼要,本文根据某轮式拾装机动臂摆角范围,选取11个具有代表性的举升角度进行动臂举升能力及其平稳性的优化设计计算,其中包括; <^=0° ;心-三个典型状态,计算优化前、后各状 态下动臂举升力值分别计人表4和表5,其中为优化 前、后对应姿态下动臂举升力的实际测量值。
表4优化前动臂錄温|臂賴能力数据名称M-J(kg• m)M J(kg.m)GnAg 01=64°2967431.25 2.85588884402=4503627601.19 3.3958918299 3=30°4681866.74 4.158917871e4=15°55531073.90 4.638966947l9s=0°61801208.6 4.8011035984H〇。
64231253.45 4.72810931006e 7=-2〇°64971260.51 4.51211611103e 8=-3〇°63681229.54 4.158********沒9=-38。
60971177.94 3.78313001235e i〇=-5〇°53741058.15 3.08613981356e n=-81°4208887.91 2.23414861412后动臂的摆角范围分别为^=145°和^=140°, 变化非常小。
但是在优化前动臂举升力从最大俯角到最大仰角分1……=64°区间呈现单边迅速下降趋势,其动臂举升力减小60%,工作装置受 力变化巨大,且最大俯角偏大,最大仰角不足,不参考文献[1]同济大学•单斗液压挖掘机[M ]•北京:中国建筑工业 出版社,1986.[2]林慕义,史青录.单斗液压挖掘机构造与设计[M ].北京:冶金工业出版社,2011.4.[3] GB 25684.5-2010 土方机械安全第5部分:液压挖掘机的要求[S].[4]GB/T 13331-2005《土方机械液压挖掘机起重量》[S].[5]陈国俊•液压挖掘机(上、下册)[M].武汉:华中科技大学出版社,2011.10.作者简介:谢帮亮泉州鑫豪工程机械科技有限公司工程师(收稿日期:2016.05.10)〇6=-1〇°73481248.53 4.802127012450 7=-■20°72101253.22 4.58213001235沒8=_-30°68071220.12 4.223132312966 9=--38°62681167.05 3.84313271287^ 10='-50°50661045.39 3.13412831257011=--67°4117949.972.641119911392.3优化前、后动臂举升能力及其平稳性的结 果分析为了更加直观的分析动臂举升能力及其平稳性 的优化效果,将上述表4、表5中1~ 11个姿态下动臂 理论举升力数据和实测动臂举升力数据做成图形加 以分析,如下图3所示。