Application of the $tau$-Function Theory of Painlev'e Equations to Random Matrices PIV, PII
oraclefunction用法
oraclefunction⽤法函数调⽤限制1、SQL语句中只能调⽤存储函数(服务器端),⽽不能调⽤客户端的函数2、SQL只能调⽤带有输⼊参数,不能带有输出,输⼊输出函数3、SQL不能使⽤PL/SQL的特有数据类型(boolean,table,record等)4、SQL语句中调⽤的函数不能包含INSERT,UPDATE和DELETE语句1.function函数的语法如下:1create or replace function function_name (2 argu1 [mode1] datatype1, --定义参数变量3 argu2 [mode2] datatype2 --定义参数变量4 ) return datatype --定义返回的数据类型5is67begin89end;执⾏:var v1 varchar2(100)exec :v1:=function_name2.不带任何参数的定义create or replace function get_userreturn varchar2isResult varchar2(50); --定义变量beginselect username into Result from user_users;return(Result); --返回值end get_user;3.带有in参数的create or replace function get_sal(empname in varchar2) return numberisResult number;beginselect sal into Result from emp where ename=empname;return(Result);end;执⾏:SQL>var sal numberSQL>exec :sal:=get_sal('scott');4.带out参数的create or replace function get_info(e_name varchar2,job out varchar2) return numberIsResult number;beginselect sal,job into Result,job from emp where ename=e_name;return(Result);end;执⾏:SQL>var job varchar2(20)SQL>var dname varchar2(20)SQL>exec :dname:=get_info('SCOTT',:job)5.带in out参数的6.函数调⽤举例create or replace function f_sys_getseqid(v_seqname IN VARCHAR2,v_provincecode IN VARCHAR2--省编码) return Varchar2ISiv_date VARCHAR2(8);iv_seqname VARCHAR2(50);iv_sqlstr VARCHAR2(200);iv_seq VARCHAR2(8);iv_seqid VARCHAR2(16);BEGINiv_seqname :=LOWER(TRIM(v_seqname));iv_sqlstr :='SELECT '||iv_seqname||'.nextval FROM DUAL';EXECUTE IMMEDIATE iv_sqlstr INTO iv_seq;--执⾏动态的sql语句,执⾏相似的⼀组语句IF v_seqname ='SEQ_FUNCROLE_ID'THENiv_seqid:='ESS'|| LPAD(iv_seq,5,'0');ELSESELECT substrb(v_provincecode,1,2)||TO_CHAR(SYSDATE,'yymmdd') INTO iv_date FROM DUAL;iv_seqid:= iv_date || LPAD(iv_seq,8,'0');END IF;RETURN iv_seqid;EXCEPTIONWHEN OTHERS THENRETURN NULL;END;调⽤⽅式如下:SELECT TO_NUMBER(F_SYS_GETSEQID('SEQ_TERMTRADE_ID', V_PROVINCE_CODE)) INTO V_BATCH_ID FROM DUAL; EXECUTE IMMEDIATE的说明:执⾏动态的sql语句。
$.operate js用法

$.operate js用法操作符是编程语言中的关键概念之一,它们用于执行各种计算和操作。
在JavaScript中,操作符起着非常重要的作用,它们能够帮助我们进行数学计算、逻辑运算和字符串操作等各种任务。
本文将深入讨论JavaScript中的.operate操作符,以及它的使用方法和示例。
首先,我们需要了解.operate操作符的作用和定义。
在JavaScript 中,.operate操作符被用于执行数学运算,它可以接受一个字符串类型的数学表达式,并将其计算出结果。
这个操作符通过调用JavaScript解析器来实现,通过将字符串表达式转换为可执行的代码,并返回计算结果。
.operate操作符具有以下特点:1. 可以执行各种数学运算,如加法、减法、乘法、除法等。
2. 可以进行逻辑运算,如与、或、非等。
3. 可以处理字符串的连接和比较操作。
下面我们来详细介绍.operate操作符的使用方法。
使用.operate操作符的一般步骤如下:1. 引入jQuery库:在使用.operate操作符之前,我们需要先引入jQuery 库。
可以通过在HTML代码中添加以下脚本标签来实现:<script src="2. 构建数学表达式:我们需要构建一个包含数学表达式的字符串,并将其赋值给一个变量。
例如:var expression = "2 + 3 * 4";3. 使用.operate操作符进行计算:通过调用.operate函数,将表达式作为参数传递进去,然后将计算结果赋值给一个变量。
例如:var result = .operate(expression);4. 输出结果:我们可以通过console.log函数将计算结果输出到控制台,以验证计算结果是否正确。
例如:console.log(result);除了基本的数学运算外,.operate操作符还支持其他一些特殊的运算。
下面给出一些示例:1. 字符串连接:var str1 = "Hello";var str2 = "World";var expression = str1 + " " + str2;var result = .operate(expression); console.log(result); 输出:Hello World2. 逻辑运算:var x = 5;var y = 10;var expression1 = (x > 3) && (y < 15); var expression2 = (x < 3) (y > 15); var expression3 = !(x == y);var result1 = .operate(expression1); var result2 = .operate(expression2); var result3 = .operate(expression3); console.log(result1); 输出:true console.log(result2); 输出:true console.log(result3); 输出:true3. 数组操作:var arr = [1, 2, 3, 4, 5];var expression1 = arr[2] + arr[3];var expression2 = arr.length > 4;var result1 = .operate(expression1);var result2 = .operate(expression2);console.log(result1); 输出:7console.log(result2); 输出:true通过以上示例,我们可以看到.operate操作符在JavaScript中的广泛应用。
mt4中文帮助命令中文手册

MQL4 Reference MQL4命令手册(本手册采用Office2007编写)2010年2月目录MQL4 Reference (1)MQL4命令手册 (1)Basics基础 (12)Syntax语法 (12)Comments注释 (12)Identifiers标识符 (12)Reserved words保留字 (13)Data types数据类型 (13)Type casting类型转换 (14)Integer constants整数常量 (14)Literal constants字面常量 (14)Boolean constants布尔常量 (15)Floating-point number constants (double)浮点数常量(双精度) (15)String constants字符串常量 (15)Color constants颜色常数 (16)Datetime constants日期时间常数 (16)Operations & Expressions操作表达式 (17)Expressions表达式 (17)Arithmetical operations算术运算 (17)Assignment operation赋值操作 (17)Operations of relation操作关系 (18)Boolean operations布尔运算 (18)Bitwise operations位运算 (19)Other operations其他运算 (19)Precedence rules优先规则 (20)Operators操作符 (21)Compound operator复合操作符 (21)Expression operator表达式操作符 (21)Break operator终止操作符 (21)Continue operator继续操作符 (22)Return operator返回操作符 (22)Conditional operator if-else条件操作符 (23)Switch operator跳转操作符 (23)Cycle operator while循环操作符while (24)Cycle operator for循环操作符for (24)Functions函数 (25)Function call函数调用 (26)Special functions特殊函数 (27)Variables变量 (27)Local variables局部变量 (28)Formal parameters形式变量 (28)Static variables静态变量 (29)Global variables全局变量 (29)Defining extern variables外部定义变量 (30)Initialization of variables初始化变量 (30)External functions definition外部函数的定义 (30)Preprocessor预处理 (31)Constant declaration常量声明 (31)Controlling compilation编译控制 (32)Including of files包含文件 (32)Importing of functions导入功能 (33)Standard constants标准常数 (35)Series arrays系列数组 (35)Timeframes图表周期时间 (35)Trade operations交易操作 (36)Price constants价格常数 (36)MarketInfo市场信息识别符 (36)Drawing styles画线风格 (37)Arrow codes预定义箭头 (38)Wingdings宋体 (39)Web colors颜色常数 (39)Indicator lines指标线 (40)Ichimoku Kinko Hyo (41)Moving Average methods移动平均方法 (41)MessageBox信息箱 (41)Object types对象类型 (43)Object properties对象属性 (44)Object visibility (45)Uninitialize reason codes撤销初始化原因代码 (45)Special constants特别常数 (46)Error codes错误代码 (46)Predefined variables预定义变量 (50)Ask最新卖价 (50)Bars柱数 (50)Bid最新买价 (50)Close[]收盘价 (51)Digits汇率小数位 (51)High[]最高价 (51)Low[]最低价 (52)Open[]开盘价 (53)Point点值 (53)Time[]开盘时间 (53)Volume[]成交量 (54)Program Run程序运行 (56)Program Run程序运行 (56)Imported functions call输入函数调用 (57)Runtime errors运行错误 (57)Account information账户信息 (68)AccountBalance( )账户余额 (68)AccountCredit( )账户信用点数 (68)AccountCompany( )账户公司名 (68)AccountCurrency( )基本货币 (68)AccountEquity( )账户资产净值 (68)AccountFreeMargin( )账户免费保证金 (69)AccountFreeMarginCheck()账户当前价格自由保证金 (69)AccountFreeMarginMode( )账户免费保证金模式 (69)AccountLeverage( )账户杠杆 (69)AccountMargin( )账户保证金 (69)AccountName( )账户名称 (70)AccountNumber( )账户数字 (70)AccountProfit( )账户利润 (70)AccountServer( )账户连接服务器 (70)AccountStopoutLevel( )账户停止水平值 (70)AccountStopoutMode( )账户停止返回模式 (71)Array functions数组函数 (72)ArrayBsearch()数组搜索 (72)ArrayCopy()数组复制 (72)ArrayCopyRates()数组复制走势 (73)ArrayCopySeries()数组复制系列走势 (74)ArrayDimension()返回数组维数 (75)ArrayGetAsSeries()返回数组序列 (75)ArrayInitialize()数组初始化 (75)ArrayIsSeries()判断数组连续 (75)ArrayMaximum()数组最大值定位 (76)ArrayMinimum()数组最小值定位 (76)ArrayRange()返回数组指定维数数量 (76)ArrayResize()改变数组维数 (77)ArraySetAsSeries()设定系列数组 (77)ArraySize()返回数组项目数 (78)ArraySort()数组排序 (78)Checkup检查 (79)GetLastError( )返回最后错误 (79)IsConnected( )返回联机状态 (79)IsDemo( )返回模拟账户 (79)IsDllsAllowed( )返回dll允许调用 (80)IsExpertEnabled( )返回智能交易开启状态 (80)IsLibrariesAllowed( )返回数据库函数调用 (80)IsOptimization( )返回策略测试中优化模式 (81)IsStopped( )返回终止业务 (81)IsTesting( )返回测试模式状态 (81)IsTradeAllowed( )返回允许智能交易 (81)IsTradeContextBusy( )返回其他智能交易忙 (82)IsVisualMode( )返回智能交易“图片模式” (82)UninitializeReason( )返回智能交易初始化原因 (82)Client terminal客户端信息 (83)TerminalCompany( )返回客户端所属公司 (83)TerminalName( )返回客户端名称 (83)TerminalPath( )返回客户端文件路径 (83)Common functions常规命令函数 (84)Alert弹出警告窗口 (84)Comment显示信息在走势图左上角 (84)GetTickCount获取时间标记 (84)MarketInfo在市场观察窗口返回不同数据保证金列表 (85)MessageBox创建信息窗口 (85)PlaySound播放声音 (86)Print窗口中显示文本 (86)SendFTP设置FTP (86)SendMail设置Email (87)Sleep指定的时间间隔内暂停交易业务 (87)Conversion functions格式转换函数 (88)CharToStr字符转换成字符串 (88)DoubleToStr双精度浮点转换成字符串 (88)NormalizeDouble给出环绕浮点值的精确度 (88)StrToDouble字符串型转换成双精度浮点型 (89)StrToInteger字符串型转换成整型 (89)StrToTime字符串型转换成时间型 (89)TimeToStr时间类型转换为"yyyy.mm.dd hh:mi"格式 (89)Custom indicators自定义指标 (91)IndicatorBuffers (91)IndicatorCounted (92)IndicatorDigits (92)IndicatorShortName (93)SetIndexArrow (94)SetIndexBuffer (94)SetIndexDrawBegin (95)SetIndexEmptyValue (95)SetIndexLabel (96)SetIndexShift (97)SetIndexStyle (98)SetLevelStyle (98)SetLevelValue (99)Date & Time functions日期时间函数 (100)Day (100)DayOfWeek (100)Hour (100)Minute (101)Month (101)Seconds (101)TimeCurrent (101)TimeDay (102)TimeDayOfWeek (102)TimeDayOfYear (102)TimeHour (102)TimeLocal (102)TimeMinute (103)TimeMonth (103)TimeSeconds (103)TimeYear (103)Year (104)File functions文件函数 (105)FileClose关闭文件 (105)FileDelete删除文件 (105)FileFlush将缓存中的数据刷新到磁盘上去 (106)FileIsEnding文件结尾 (106)FileIsLineEnding (107)FileOpen打开文件 (107)FileOpenHistory历史目录中打开文件 (108)FileReadArray将二进制文件读取到数组中 (108)FileReadDouble从文件中读取浮点型数据 (109)FileReadInteger从当前二进制文件读取整形型数据 (109)FileReadNumber (109)FileReadString从当前文件位置读取字串符 (110)FileSeek文件指针移动 (110)FileSize文件大小 (111)FileTell文件指针的当前位置 (111)FileWrite写入文件 (112)FileWriteArray一个二进制文件写入数组 (112)FileWriteDouble一个二进制文件以浮动小数点写入双重值 (113)FileWriteInteger一个二进制文件写入整数值 (113)FileWriteString当前文件位置函数写入一个二进制文件字串符 (114)Global variables全局变量 (115)GlobalVariableCheck (115)GlobalVariableDel (115)GlobalVariableGet (115)GlobalVariableName (116)GlobalVariableSet (116)GlobalVariableSetOnCondition (116)GlobalVariablesTotal (117)Math & Trig数学和三角函数 (119)MathAbs (119)MathArccos (119)MathArcsin (119)MathArctan (120)MathCeil (120)MathCos (120)MathExp (121)MathFloor (121)MathLog (122)MathMax (122)MathMin (122)MathMod (122)MathPow (123)MathRand (123)MathRound (123)MathSin (124)MathSqrt (124)MathSrand (124)MathTan (125)Object functions目标函数 (126)ObjectCreate建立目标 (126)ObjectDelete删除目标 (127)ObjectDescription目标描述 (127)ObjectFind查找目标 (127)ObjectGet目标属性 (128)ObjectGetFiboDescription斐波纳契描述 (128)ObjectGetShiftByValue (128)ObjectGetValueByShift (129)ObjectMove移动目标 (129)ObjectName目标名 (129)ObjectsDeleteAll删除所有目标 (130)ObjectSet改变目标属性 (130)ObjectSetFiboDescription改变目标斐波纳契指标 (131)ObjectSetText改变目标说明 (131)ObjectsTotal返回目标总量 (131)ObjectType返回目标类型 (132)String functions字符串函数 (133)StringConcatenate字符串连接 (133)StringFind字符串搜索 (133)StringGetChar字符串指定位置代码 (133)StringLen字符串长度 (134)StringSubstr提取子字符串 (134)StringTrimLeft (135)StringTrimRight (135)Technical indicators技术指标 (136)iAC比尔.威廉斯的加速器或减速箱振荡器 (136)iAD离散指标 (136)iAlligator比尔・威廉斯的鳄鱼指标 (136)iADX移动定向索引 (137)iATR平均真实范围 (137)iAO比尔.威廉斯的振荡器 (138)iBearsPower熊功率指标 (138)iBands保力加通道技术指标 (138)iBandsOnArray保力加通道指标 (139)iBullsPower牛市指标 (139)iCCI商品通道索引指标 (139)iCCIOnArray商品通道索引指标 (140)iCustom指定的客户指标 (140)iDeMarker (140)iEnvelopes包络指标 (141)iEnvelopesOnArray包络指标 (141)iForce强力索引指标 (142)iFractals分形索引指标 (142)iGator随机震荡指标 (142)iIchimoku (143)iBWMFI比尔.威廉斯市场斐波纳契指标 (143)iMomentum动量索引指标 (143)iMomentumOnArray (144)iMFI资金流量索引指标 (144)iMA移动平均指标 (144)iMAOnArray (145)iOsMA移动振动平均震荡器指标 (145)iMACD移动平均数汇总/分离指标 (146)iOBV能量潮指标 (146)iSAR抛物线状止损和反转指标 (146)iRSI相对强弱索引指标 (147)iRSIOnArray (147)iRVI相对活力索引指标 (147)iStdDev标准偏差指标 (148)iStdDevOnArray (148)iStochastic随机震荡指标 (148)iWPR威廉指标 (149)Timeseries access时间序列图表数据 (150)iBars柱的数量 (150)iClose (150)iHigh (151)iHighest (151)iLow (152)iLowest (152)iOpen (152)iTime (153)iVolume (153)Trading functions交易函数 (155)Execution errors (155)OrderClose (157)OrderCloseBy (158)OrderClosePrice (158)OrderCloseTime (158)OrderComment (159)OrderCommission (159)OrderDelete (159)OrderExpiration (160)OrderLots (160)OrderMagicNumber (160)OrderModify (160)OrderOpenPrice (161)OrderOpenTime (161)OrderPrint (162)OrderProfit (162)OrderSelect (162)OrderSend (163)OrdersHistoryTotal (164)OrderStopLoss (164)OrdersTotal (164)OrderSwap (165)OrderSymbol (165)OrderTakeProfit (165)OrderTicket (166)OrderType (166)Window functions窗口函数 (167)HideTestIndicators隐藏指标 (167)Period使用周期 (167)RefreshRates刷新预定义变量和系列数组的数据 (167)Symbol当前货币对 (168)WindowBarsPerChart可见柱总数 (168)WindowExpertName智能交易系统名称 (169)WindowFind返回名称 (169)WindowFirstVisibleBar第一个可见柱 (169)WindowHandle (169)WindowIsVisible图表在子窗口中可见 (170)WindowOnDropped (170)WindowPriceMax (170)WindowPriceMin (171)WindowPriceOnDropped (171)WindowRedraw (172)WindowScreenShot (172)WindowTimeOnDropped (173)WindowsTotal指标窗口数 (173)WindowXOnDropped (173)WindowYOnDropped (174)Obsolete functions过时的函数 (175)MetaQuotes Language 4 (MQL4) 是一种新的内置型程序用来编写交易策略。
typeof的用法

typeof的用法
typeof是JavaScript中的一个操作符,用于获取一个变量或表达式的数据类型。
以下是一些typeof的常见用法:
1.检查变量的数据类型:使用typeof操作符可以确定一个变量的数据类型。
2.检查函数的数据类型:typeof操作符也可以用于检查函数的数据类型。
3.检查对象的数据类型:对于对象,typeof操作符会返回"object",而不能确定具体的对象类型。
4.检查未定义的变量:如果尝试检查一个未定义的变量,typeof操作符会返回"undefined"。
5.与"typeof"字符串进行比较:由于typeof操作符返回的是一个字符串,可以将其与特定的字符串进行比较,以执行基于数据类型的逻辑
这是typeof的一些常见用法。
需要注意的是,typeof操作符对于基本数据类型(如字符串、数字、布尔值等)可以准确地返回数据类型,但对于复杂的数据类型(如对象、数组等),它只能返回"object"或"array",而不能确定具体的类型。
如果
需要更详细的类型信息,可以使用其他方法,如instanceof操作符或对象的constructor属性。
typeof 运算符概念

typeof 运算符概念typeof 是一种在许多编程语言中使用的运算符,用于获取操作数的数据类型。
它返回一个字符串,表示操作数的数据类型。
typeof 运算符的概念如下:1. 语法:在大多数编程语言中,typeof 运算符的语法通常为`typeof operand`,其中operand 是要检查数据类型的操作数。
2. 返回值:typeof 运算符返回一个字符串,表示operand 的数据类型。
常见的返回值包括"undefined"(未定义)、"number"(数字)、"string"(字符串)、"boolean"(布尔值)、"object"(对象)、"function"(函数)等。
3. 用途:typeof 运算符常用于条件语句或类型检查中。
通过typeof 运算符可以判断一个变量或值的数据类型,并根据需要执行不同的操作或采取相应的逻辑。
以下是一些示例:```javascriptvar num = 10;var str = "Hello";var bool = true;var obj = {};var func = function() {};console.log(typeof num); // 输出"number"console.log(typeof str); // 输出"string"console.log(typeof bool); // 输出"boolean"console.log(typeof obj); // 输出"object"console.log(typeof func); // 输出"function"console.log(typeof undefinedVar); // 输出"undefined"```需要注意的是,typeof 运算符对于某些特殊情况的处理可能会有一些差异,具体取决于编程语言的实现。
记一次tomcat7.0版本启动项目失败问题

记⼀次tomcat7.0版本启动项⽬失败问题测试项⽬在tomcat7中启动失败,报错如下:@794314bc3Error during job execution (jobs.Bootstrap)Oops: VerifyError~ play.Logger.niceThrowable(Logger.java:570) ~ play ~ 35845play.exceptions.UnexpectedException: Unexpected Errorat play.Invoker$Invocation.onException(Invoker.java:244)at play.jobs.Job.onException(Job.java:124)at play.jobs.Job.call(Job.java:163)at Invocation.Job(Play!)Caused by: ng.VerifyError: Expecting a stack map frameException Details:Location:controllers/payment/PaymentBaseAction.check()V @23: nopReason:Expected stackmap frame at this location.Bytecode:0000000: b804 1c00 b801 8c9a 00121301 8e03 bd000000010: 6bb8 0190 a700 c700 b1b8 0192 b800 794b0000020: 1304 152a b804 1700 2ab6 009e 3c13 04180000030: 1bb8 041a 001b aa00 00000097000000000000040: 00000004000000220000 007f 000000850000050: 0000 008b 00000091 2a4d 014e 2c13 02a20000060: 1302 a413 02a6 b802 aac0 004f 4e2d b8000000070: 4999 003e 2a4d 033e 2c13 02ab 1302 ac130000080: 02ae b802 b0c0 0141 b602 b33e 1d99 00220000090: 2a4d 014e 2c13 02b4 1302 b513 02b7 b80200000a0: b9c0 004f 4e2d b800 22990006 b800 acb800000b0: 00af a700 1bb8 00b2 a700 15b8 00b5 a70000000c0: 0fb8 00b8 a700 09b8 00bb a700 03a7 000e00000d0: 3a06 013a 05b8 041e 1906 bf01 3a05 b80400000e0: 20b1Exception Handler Table:bci [0, 208] => handler: 208Stackmap Table:same_frame(@25)append_frame(@88,Object[#122])chop_frame(@175,1)same_frame(@181)same_frame(@187)same_frame(@193)same_frame(@199)same_frame(@205)same_locals_1_stack_item_frame(@208,Object[#978])same_frame(@219)at payment.PaymentProxy.init(PaymentProxy.java:60)at jobs.Bootstrap.initPayment(Bootstrap.java:64)at jobs.Bootstrap.doJob(Bootstrap.java:54)at play.jobs.Job.doJobWithResult(Job.java:50)at play.jobs.Job.call(Job.java:146)... 1more原因:jvm验证时出了错误:显⽰字节码错误:⽹上的解释是因为引⼊版本为51的字节码规范,使⽤了严格的类型检查器,任何⼯具修改了字节码的,都需要更新stackmap,但是jws修改了字节码,⽽没有更新 stackmap使⽤了即java的新特性,所以使⽤较⾼的版本进⾏编译时就会报这个错。
method querytotal executaion error of

method querytotal executaion error of 方法查询总数执行错误==========在数据库操作中,查询总数是一种常见的操作。
当我们需要了解一个查询或一组查询在数据库中执行的总次数时,可以使用查询总数功能。
然而,有时候可能会遇到方法查询总数执行错误的问题。
一、问题概述------查询总数错误可能由多种原因引起,例如查询执行过程中的错误、系统资源不足、权限问题等。
解决这类问题需要结合具体的错误信息和系统环境进行分析。
二、常见错误类型-------1. **语法错误**:查询语句的语法不正确,导致无法正确执行。
2. **权限不足**:执行查询的用户没有足够的权限来访问需要查询的对象。
3. **资源限制**:系统资源(如内存、CPU、磁盘空间)不足,导致查询无法执行。
4. **配置问题**:数据库配置参数(如缓存设置、日志级别等)可能影响查询总数功能的正常工作。
三、解决方法------### 1. 检查查询语句首先,检查查询语句的语法是否正确,是否存在特殊字符或关键字错误。
如果发现错误,及时修正。
### 2. 确认权限确保执行查询的用户具有足够的权限来访问需要查询的对象。
如果权限不足,需要调整用户权限或联系系统管理员。
### 3. 检查系统资源检查系统资源使用情况,确保有足够的资源可供查询使用。
可以通过调整系统配置或增加资源来解决问题。
### 4. 调整数据库配置检查数据库配置参数,确保它们符合需求。
可以尝试调整缓存设置、日志级别等参数,以优化查询总数功能的性能。
### 5. 查看日志信息查看数据库的错误日志和性能日志,了解是否有更详细的错误信息或异常行为。
这些信息可能有助于确定问题的根本原因。
### 6. 尝试手动执行查询手动尝试执行相同的查询语句,看是否可以成功获取到查询总数。
这样可以确认查询本身没有问题,而是系统问题导致的错误。
### 7. 联系技术支持如果以上方法都无法解决问题,可以尝试联系数据库的技术支持团队或服务提供商,他们可能会提供专业的帮助和解决方案。
Application.Goto方法
Application.Goto 方法2011-11-09 20:55:13| 分类: Excel应用 | 标签: |字号大中小订阅选定任意工作簿中的任意区域或任意 Visual Basic 过程,并且如果该工作簿未处于活动状态,就激活该工作簿。
语法:表达式.Goto(Reference, Scroll)表达式一个代表 Application 对象的变量。
参数名称必选/可选数据类型说明Reference可选Variant目标。
可以是 Range 对象、包含 R1C1-样式批注的单元格引用的字符串或包含 Visual Basic 过程名的字符串。
如果省略该参数,目标将为最近一次用 Goto 方法选定的区域。
Scroll可选Variant如果为 True,则滚动窗口直至区域的左上角出现在窗口的左上角中。
如果为 False,则不滚动窗口。
默认值为 False。
说明:该方法与 Select 方法的区别:如果指定的区域不在位于最前面屏幕的工作表中,Microsoft Excel 将在选定该区域之前切换至该工作表。
(如果对不在屏幕的最前面的工作表中的区域使用 Select 方法,则选定该区域时并不激活该工作表)。
该方法具有让用户滚动目标窗口的 Scroll 参数。
当使用 Goto 方法时,前一次选定区域(Goto 方法运行前)被增加到以前选定区域的数组中(有关详细信息,请参阅 PreviousSelections属性)。
可以使用该功能快速跳过选定区域,选定区域最多为四个。
Select 方法具有 Replace 参数,而 Goto 方法没有该参数。
示例本示例选定工作表 Sheet1 中的单元格 A154,并滚动工作表以显示该区域。
Application.Goto Reference:=Worksheets(";Sheet1";).Range(";A154";), scroll:=True知识点提示:比较Activate、Select与Goto异同1、Activate是用来激活对象的方法,而Select方法是用来选取对象的方法,能使用方法一次选取多个工作表,但不能用Activate方法一次激活多个工作表,一次只能激活一个工作表。
$.operate js用法 -回复

$.operate js用法-回复操作符在JavaScript中扮演着至关重要的角色。
操作符是一种被用于执行特定操作的符号或关键字。
在JavaScript中,有许多不同类型的操作符,包括算术操作符、比较操作符、逻辑操作符和位操作符。
在本文中,我们将重点讨论".operate"这个特殊的操作符,并深入探讨它的用法。
首先,让我们来了解一下".operate"操作符的基本语法。
通常,它是配合jQuery库使用的,因此我们需要确保我们在使用之前已经正确引入了jQuery库。
该操作符接受两个参数,分别是操作符类型和要执行操作的数值。
在这里,操作符类型可以是任何支持的算术操作符,包括加法、减法、乘法和除法。
让我们来看一个简单的例子来说明这个操作符的用法。
假设我们想要计算两个数的乘积,我们可以使用如下的语法:javascriptvar result = .operate("*", 5, 7);console.log(result);在上面的例子中,我们使用了"*"操作符作为操作符类型,并将5和7作为要进行乘法运算的两个数。
计算的结果将被赋值给"result"变量,然后通过"console.log"语句打印出来。
运行这段代码,我们将看到控制台输出结果为35。
除了乘法之外,我们还可以使用其他的算术操作符,例如加法、减法和除法。
下面是相应的示例代码:javascriptvar result1 = .operate("+", 10, 5); 加法var result2 = .operate("-", 10, 5); 减法var result3 = .operate("/", 10, 5); 除法console.log(result1); 输出结果为15console.log(result2); 输出结果为5console.log(result3); 输出结果为2在上面的例子中,我们使用了不同的操作符类型来执行不同的算术操作。
如何处理船舶空调_通风系统中的电磁兼容问题
如何处理船舶空调、通风系统中的电磁兼容问题张 慧摘 要 当各种高科技的电气电子设备被安装在同一条船上时,会引起电磁干扰,所以必须采取有效措施,解决电磁兼容问题。
本文根据实船经验,介绍了空调、通风系统在解决电磁兼容问题时,所采取的各种屏蔽及接地措施。
关键词 电磁兼容 风管 屏蔽 接地 随着现代科学技术的飞速发展,各种电子设备的应用越来越广泛,这些设备如通信发射机、雷达发射机、各种功用的天线及大量计算机等都具有接收机灵敏度高、频率范围宽及发射功率大小不等等特点,如果它们被装载在一条船上的话,就必然引起该船的电磁环境恶化,产生电磁干扰,因此必须采取有效措施,解决电磁兼容问题。
所谓电磁兼容就是采用合理的防干扰措施,使所有的电气电子设备、燃油、武备、人体等在系统的电磁环境下互不引起电磁干扰和电磁危害,从而使电子电气设备及武备系统能发挥其本身应有的功能。
电磁干扰的传播方式主要有3种,即传导、辐射和感应,而我们空调专业穿过一些重要舱室的送风管及回风管就是一个传播途径。
电磁兼容设计除了设备本身的优化信号设计、完善线路设计、滤波等方法外,很重要的就是屏蔽和接地两项措施。
所谓屏蔽就是用屏蔽体将干扰源包封起来,可以防止干扰电磁场通过空间向外传播;反之,用屏蔽体将感受器包封,就可使感受器免受外界空间电磁场的影响。
另外,接地也是抑制噪声和防止干扰的重要措施。
下面根据实船经验谈谈空调、通风系统在电磁兼容方面所采取的具体措施。
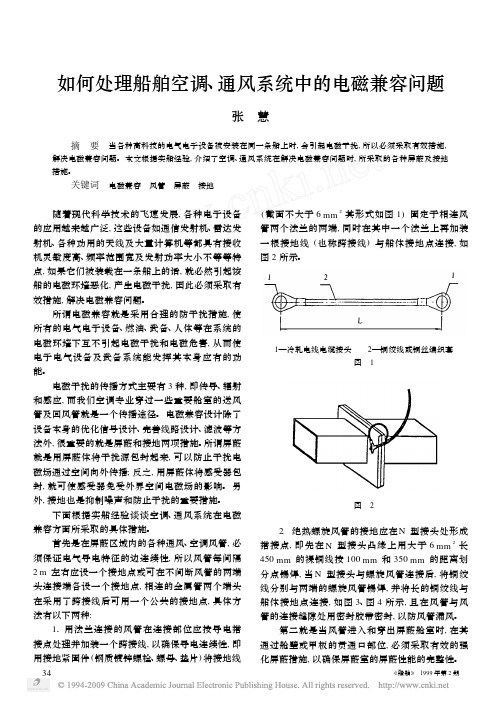
首先是在屏蔽区域内的各种通风、空调风管,必须保证电气导电特征的边连续性,所以风管每间隔2m左右应设一个接地点或可在不间断风管的两端头连接端各设一个接地点,相连的金属管两个端头在采用了跨接线后可用一个公共的接地点,具体方法有以下两种:1—冷轧电线电缆接头 2—铜绞线或铜丝编织套图 1图 211用法兰连接的风管在连接部位应按导电搭接点处理并加装一个跨接线,以确保导电连续性,即用接地紧固件(钢质镀锌螺栓、螺母、垫片)将接地线(截面不大于6mm2其形式如图1)固定于相连风管两个法兰的两端,同时在其中一个法兰上再加装一根接地线(也称跨接线)与船体接地点连接,如图2所示。
the procedure entry point coul -回复

the procedure entry point coul -回复关于"The Procedure Entry Point Coul"的内容。
首先,我想明确一下,"The Procedure Entry Point Coul"是一个非常常见的错误提示。
它通常是在Windows操作系统中执行程序时出现的错误信息。
这个错误提示表明系统找不到或无法识别程序所需的库文件或函数。
在解决这个问题之前,我们需要了解一些背景知识。
1. 引言和背景知识(引入错误和相关的问题)当我们在Windows操作系统上运行程序时,操作系统需要找到程序执行的入口点,以便正确加载和执行程序。
入口点是指程序中第一个被执行的代码。
通常情况下,这个入口点是一个函数,被称为main函数(或者其他一些特定的函数名,具体取决于编程语言和操作系统)。
2. 导致错误的原因出现"The Procedure Entry Point Coul"错误通常是因为操作系统在寻找程序的入口点时遇到了问题。
这可能是由于以下几个原因之一所导致的:a. 缺少所需的库文件程序可能依赖于某些库文件来执行特定的功能。
如果这些库文件不存在,或者与程序要求的版本不兼容,那么操作系统将无法找到所需的入口点。
b. 版本不兼容如果程序依赖的库文件版本与操作系统不兼容,可能会导致操作系统无法正确识别程序的入口点。
3. 解决方法解决"The Procedure Entry Point Coul"错误通常有以下几个步骤:a. 检查所需的库文件首先,我们需要确定程序所需的库文件。
可以通过查看程序的文档、开发者网站或者与程序相关的其他资源来获取所需的信息。
确定所需的库文件后,我们需要确保这些库文件已经安装在系统中。
b. 检查库文件的版本如果库文件已经安装在系统中,我们需要确保其版本与程序要求的版本兼容。
如果版本不匹配,可以尝试更新库文件到与程序兼容的版本。
$string用法
$string用法$string是一个在编程中经常使用的术语,它在不同的编程语言中可能有不同的用法,我将从多个角度来解释它的用法。
首先,$string通常用于表示一个字符串变量。
在许多编程语言中,字符串是一种数据类型,用来存储文本信息。
在PHP等语言中,$string可以用来声明一个字符串变量,例如,$string = "Hello, World!"; 这样就创建了一个名为$string的变量,并将"Hello, World!"赋值给它。
这样我们就可以在程序中使用$string 来引用这个字符串。
其次,$string还可以用于表示字符串的操作和处理。
比如在PHP中,我们可以使用$string来进行字符串的拼接、截取、替换等操作。
例如,我们可以使用$string1 = "Hello, "; $string2 = "World!"; $string = $string1 . $string2; 这样就将$string1和$string2拼接起来赋值给$string。
另外,我们还可以使用函数来处理$string,比如strlen($string)可以返回$string的长度,strpos($string, "World")可以返回"World"在$string中第一次出现的位置等。
另外,$string还可以用于表示字符串的输出和显示。
在许多编程语言中,我们可以使用echo或者print语句来将$string的值输出到屏幕上,比如在PHP中可以使用echo $string; 来输出$string的值。
总的来说,$string是一个在编程中用来表示和操作字符串的重要概念,它可以用来声明字符串变量、进行字符串操作和处理,以及将字符串输出显示出来。
希望这些解释能够帮助你更好地理解$string的用法。
Word_Application 对象

BackgroundSavingStatus'返回后台保存队列中的文件数。Long 类型,只读。
Bibliography'返回一个 Bibliography 对象,该对象代表 Microsoft Office Word 中存储的书目参考源。只读。
Move'设置任务窗口或活动文档窗口的位置。
NewWindow'打开一个新的窗口作为指定窗口,并显示原文档。返回一个 Window 对象。
NextLetter'您已经就仅在 Macintosh 上使用的 Visual Basic 关键字请求帮助。有关 Application 对象的 NextLetter 方法的信息,请参阅 Microsoft Office Macintosh Edition 所附带的语言参考帮助。
DDEExecute'通过指定的 DDE(即动态数据交换)通道,向应用程序发送一条或一组命令。
DDEInitiate'打开通向其他应用程序的 DDE(动态数据交换)通道,并返回通道序号。
DDEPoke'通过打开的 DDE(动态数据交换)通道向应用程序发送数据。
DDERequest'通过打开的 DDE(动态数据交换)通道向接收应用程序查询信息,并以 String 类型返回该信息。
PicasToPoints'将度量单位从十二点活字转换为磅值(1 十二点活字 = 12 磅)。以 Single 类型返回转换结果。
PixelsToPoints'将长度值的单位由像素转换为磅。以 Single 类型返回转换结果。
unused declaration of function 'tell

unused declaration of function 'tell标题:理解与解决“[unused declaration of function 'tell]”问题在编程领域中,我们经常会遇到各种各样的错误和警告。
其中,“[unused declaration of function 'tell]”是一个常见的编译器警告,它提示我们在代码中声明了一个名为'tell'的函数,但并未在后续的代码中使用到它。
这篇文章将详细解析这个问题的含义、可能的原因以及解决方法。
一、问题解析“[unused declaration of function 'tell]”是一个编译器警告,而非错误。
这意味着尽管你的程序可以正常运行,但存在一些可能需要优化或修正的地方。
具体来说,这个警告表示你在代码中定义了一个名为'tell'的函数,但在后续的代码中并未调用或者使用到这个函数。
二、可能的原因1. 错误的函数名:你可能在编写代码时误将函数名写错,导致在实际调用时未能找到并使用到正确的'tell'函数。
2. 临时或废弃的代码:你可能在开发过程中暂时定义了这个函数,但后来改变了实现方式或者决定不再使用这个函数,却忘记删除相关的函数声明。
3. 条件执行:你可能在某个特定条件下的代码块中调用了'tell'函数,但由于编译器在静态分析阶段无法确定这个条件是否会被满足,因此给出了未使用函数的警告。
4. 编译器设置:有些编译器允许用户自定义警告级别,如果你的警告级别设置得较高,可能会出现一些并非真正存在问题的警告。
三、解决方法1. 检查函数名:仔细检查你的代码,确保在调用'tell'函数时使用了正确的函数名和参数。
2. 删除无用代码:如果'tell'函数确实是不再需要的,那么可以直接删除其声明和实现部分,以消除警告。
乔布斯斯坦福演讲稿中英文.doc
乔布斯斯坦福演讲稿中英文乔布斯斯坦福演讲稿中英文乔布斯,苹果公司和Pixar动画工作室的CEO ,在XX 年6月在斯坦福大学毕业典礼上演讲,总结自己的一生,激励毕业生,下面请看管理资料网整理的乔布斯斯坦福演讲稿中英文乔布斯斯坦福演讲稿中英文amhonoredtobewithyoutodayatyourcommencementfrom oneofthefinestuniversitiesintheworld.Inevergrad uatedfromcol lege.Truthbe told,thisist heclosestI'v eevergottent oacollegegra duation.Toda yIwanttotell youthreestor iesfrommylif e.That'sit.N obigdeal.Jus tthreestorie s.我今天很荣幸能和你们一起参加毕业典礼,斯坦福大学是世界上最好的大学之一。
我从来没有从大学中毕业。
说实话,今天也许是在我的生命中离大学毕业最近的一天了。
今天我想向你们讲述我生活中的三个故事。
不是什么大不了的事情,只是三个故事而已。
Th efirststoryi saboutconnec tingthedots.第一个故事是关于“因”和“果”。
Idropp edoutofReedC ollegeaftert hefirst6mont hs,butthenst ayedaroundas adrop-infora nother18monthsorsobefore Ireallyquit.SowhydidIdro pout?我在Reed大学读了六个月之后就退学了,但是在十八个月以后——我真正的作出退学决定之前,我还经常去学校。
我为什么要退学呢?Itst artedbeforeI wasborn.Mybi ologicalmoth erwasayoung,unwedcollege graduatestud ent,andshede cidedtoputme upforadoptio n.Shefeltver ystronglytha tIshouldbead optedbycolle gegraduates,soeverything wasallsetfor metobeadopte datbirthbyal awyerandhisw ife.Exceptth atwhenIpoppe douttheydeci dedatthelast minutethatth eyreallywant edagirl.Somy parents,whow ereonawaitin glist,gotaca llinthemiddl eofthenighta sking:"Wehav eanunexpecte dbabyboy;doy ouwanthim?"T heysaid:"Ofc ourse."Mybio logicalmothe rlaterfoundo utthatmymoth erhadnevergr aduatedfromc ollegeandtha tmyfatherhad nevergraduat edfromhighsc hool.Sherefu sedtosignthe finaladoptio npapers.Sheo nlyrelenteda fewmonthslat erwhenmypare ntspromisedt hatIwouldsom edaygotocoll ege.故事从我出生的时候讲起。
CiA 402-1 version 3.0.0
CiA 402 Draft Standard ProposalDevice profile for drives and motion controlPart 1: General definitionsThis DSP is for CiA members only and may be changed without notification.Version: 3.0.014 December 2007! CAN in Automation (CiA) e. V.HISTORYThe CiA 402 CANopen device profile for drives and motion control was submitted to IEC for international standardization. The CiA 402 related clauses in the IEC 61800-7-1, IEC 61800-7-201 and IEC 61800-7-301 standards are published in this set of profile specifications. This set substitutes the CiA DSP 402 version 2.0 from July 2002. The device profile has been entirely reviewed and restructured. There have been dropped several object dictionary entries in order to simplify the implementation of this profile. On the other hand new operation modes have been introduced.EDITORIAL REMARKPart 1 of this set of specifications provides general information and presents the annex A of IEC 61800-7-1. Part 2 presents the IEC 61800-7-201 standard, and part 3 presents the CANopen-relevant clauses in IEC 61800-7-301.General information on licensing and patentsCAN in AUTOMATION (CiA) calls attention to the possibility that some of the elements of this CiA specification may be subject of patent rights. CiA shall not be responsible for identifying any or all such patent rights.Because this specification is licensed free of charge, there is no warranty for this specification, to the extent permitted by applicable law. Except when otherwise stated in writing the copyright holder and/or other parties provide this specification “as is” without warranty of any kind, either expressed or implied, including, but not limited to, the implied warranties of merchantability and fitness for a particular purpose. The entire risk as to the correctness and completeness of the specification is with you. Should this specification prove failures, you assume the cost of all necessary servicing, repair or correction.TrademarksCANopen® and CiA® are registered community trademarks of CAN in Automation. The use is restricted for CiA members or owners of CANopen vendor ID. More detailed terms for the use are available from CiA.© CiA 2007All rights reserved. Unless otherwise specified, no part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm, without permission in writing from CiA at the address below.CAN in Automation e. V.Kontumazgarten 3DE - 90429 Nuremberg, GermanyTel.: +49-911-928819-0Fax: +49-911-928819-79Url: Email: headquarters@CONTENTS1Scope (4)2Normative references (4)3Abbreviations and definitions (4)3.1Abbreviations (4)3.2Definitions (4)4Introduction (4)5Mapping of general architecture (5)5.1Typical structure of automation system (5)5.2Structure of the logical PDS (5)5.3Use cases of the PDS (5)5.3.1General (5)5.3.2Use case engineering (6)5.3.3Use case operation-control (6)6Functional elements (6)6.1Device identification FE (6)6.1.1General (6)6.1.2Parameters (6)6.2Device control FE (6)6.2.1General (6)6.2.2I/O data (7)6.2.3States (7)6.2.4Parameters (7)6.3Communication FE (7)6.3.1General (7)6.3.2I/O data (7)6.3.3States (8)6.3.4Parameters (8)6.4Basic drive FE (8)6.4.1General (8)6.4.2I/O data (8)6.4.3States (8)6.4.4Parameters (8)6.5Optional application functions FE (9)6.5.1General (9)6.5.2I/O data (9)6.5.3Parameters (9)7Application modes (9)7.1General (9)7.2Torque control (10)7.3Velocity control (11)7.4Position control (13)1 ScopeThis specification specifies the CANopen device profile for drives and motion control. It consists of three parts:•Part 1: General definitions•Part 2: Operation modes and application data•Part 3: PDO mappingPart 1 specifies the mapping of the power drive system as defined in IEC 61800-7-1.2 Normative references/CiA301/ CiA 301, CANopen application layer and communication profile/CiA402-2/ CiA 402-2, CANopen drive and motion control device profile – Part 2: Operation modes and application data/IEC61800-7-1/ IEC 61800-7-1, Adjustable speed electrical power drive systems – Generic interface and use of profiles for power drive systems – Interface definition3 Abbreviations and definitions3.1 AbbreviationsCAN Controller area networkCOB Communication objectID IdentifierPDO Process data objectRPDO Receive process data objectSDO Service data objectTPDO Transmit process data object3.2 DefinitionsThe definitions given in /CiA301/ and /IEC61800-7-1/ apply for this specification, too.4 IntroductionThis part specifies the mapping of the CiA 402 drive and motion control profile onto the generic power drive system (PDS) interface.Terms of the CiA 402 profile are mapped to IEC 61800-7 terms as specified in Table 1.Table 1 — Profile-specific termsIEC 61800-7 term CiA 402 term ReferenceI/O data Process data See /CiA402-2/Command Controlword See /CiA402-2/Set-point Target value See /CiA402-2/Status Statusword See /CiA402-2/Actual value Actual value See /CiA402-2/5 Mapping of general architecture5.1 Typical structure of automation systemThe typical structure of automation system and the structure of the logical PDS given in /IEC61800-7-1/ apply to this specification. The control device featuring the generic PDS interface controls the drive devices via the communication network.The network technology may provide different communication services for control and monitoring respectively configuration and diagnostic purposes. The drive device and the control device may produce specific emergency messages in case of the detection of several device-internal failures.All process data, communication and application objects are listed in the object dictionary of the drive device. The object dictionary entries are accessible by means of specific communication services. The entries are uniquely addressed by the 16-bit index and the 8-bit sub-index.5.2 Structure of the logical PDSThe drive device shall support one of the modes of operation and may support several of them. The CiA 402 logical power drive system is modelled as shown in Figure 1.Figure 1 — CiA 402 logical power drive system model5.3 Use cases of the PDS5.3.1 GeneralThe drive device compliant to this profile specification may be configured and operated by means of dedicated communication services by the control device. The implementation of process data and configuration objects depends on the supported modes of operation.5.3.2 Use case engineeringThe configuration may be performed by the control device or by a dedicated tool device. The tool device may reside in the control device. The control device and the tool device use the same communication services to configure the drive device.5.3.3 Use case operation-controlThe drive device is normally operated by the control device implementing the generic PDS by means of controlword and target values. The kind of target value depends on the currently selected mode of operation. The drive device is monitored by the control device by means of the statusword and actual values. The kind of actual values depends on the currently selected mode of operation.6 Functional elements6.1 Device identification FE6.1.1 GeneralIn addition to the parameters defined in this specification, the CiA 402 profile defines some more identification parameters for the drive device and the motor. These identification parameters are available by means of communication services.6.1.2 ParametersThe identification parameters used by this drive profile are given in Table 2.Table 2 — Drive device identification parametersIEC name CANopen name Details Reference Manufacturer ID Vendor ID Object 1018 01h See /CiA301/Order ID Product code Object 1018 02h See /CiA301/Serial number Serial number Object 1018 04h See /CiA301/Hardware revision Manufacturer hardware version Object 1009 00h See /CiA301/Software revision Manufacturer software version Object 100A 00h See /CiA301/- Motor type Object 6402 00h See /CiA402-2/- Motor catalog number Object 6403 00h See /CiA402-2/- Motor manufacturer Object 6404 00h See /CiA402-2/- http motor catalog address Object 6405 00h See /CiA402-2/- Motor calibration date Object 6406 00h See /CiA402-2/- Motor service period Object 6407 00h See /CiA402-2/- Supported drive modes Object 6502 00h See /CiA402-2/- Drive catalog number Object 6503 00h See /CiA402-2/- http drive catalog address Object 6505 00h See /CiA402-2/6.2 Device control FE6.2.1 GeneralThe device control FE of the drive device shall provide information on fault situations by means of the statusword. The fault shall be reset by means of the controlword.6.2.2 I/O dataThe fault state of the device control FE shall be signalled by setting the bit 4 of statusword to 1. The fault reset shall be command by setting the bit 7 from 0 to 1. The status values are given in Table 3. The command values are given in Table 4.Table 3 — Status values for the device control FEIEC name CANopen name Details Reference Faulted Fault and fault reaction active Object 6041h See /CiA402-2/No fault Not ready to switch on, switch onObject6041h See /CiA402-2/disabled, ready to switch on,switched on, opration enabled,quick stop activeTable 4 — Command values for the device control FEIEC name CANopen name Details Reference Reset fault Fault reset bit 0 to 1 Object 6040h See /CiA402-2/6.2.3 StatesThe fault reaction active and fault state is equivalent to the device control FE Faulted state. If no fault is indicated in the statusword, this is equivalent to the device control FE No fault state.6.2.4 ParametersThe occurrence of a failure shall be indicated as defined in Table 5. The reset shall be commanded as defined in Table 5.Table 5 — Parameters in the device control FEIEC name CANopen name Details Reference Fault Fault bit Object 6041h See /CiA402-2/Warning Fault reaction code Object 605E h See /CiA402-2/6.3 Communication FE6.3.1 GeneralThe communication FE of the drive device includes the network management slave FSA controlled by the network management master device. The network management is network technology dependent.6.3.2 I/O dataThe network management master controls the PDS communication FSA by means of NMT messages. The drive device provides its communication status by means of network technology specific mechanism (e.g. CANopen defines the node/life guarding function and the heartbeat function). The status values are given in Table 6. The command values are given in Table 7.Table 6 — Status values for the communication FEIEC name CANopen name Details ReferenceCommunication running Operational 5d See /CiA301/127d or 4d See /CiA301/Communication stopped Pre-operational orStoppedTable 7 — Command values for the communication FEIEC name CANopen name Details ReferenceStop communication Enter pre-operationalor Stop remote node CS = 128dor 2dSee /CiA301/Run communication Start remote node CS = 1d See /CiA301/If the drive device and the control device like to exchange process data synchronously, the used network technology is responsible to achieve synchronous transmission.6.3.3 StatesThe Communication stopped state is equivalent to the NMT pre-operational or NMT stopped state. The Communication running state is equivalent to the NMT operational state.The synchronization is network technology dependent. In CANopen, each Process Data Object (PDO) may be configured individually to be transmitted or to be received synchronously. If synchronization is lost, the drive device may send an Emergency message. Another possibility is to use a global time base.6.3.4 ParametersThe parameters are network technology specific.6.4 Basic drive FE6.4.1 GeneralThis profile defines a PDS FSA that is controlled by the controlword received from the control device. This FSA provides sub-states, which are defined in detail in /CiA402-2/. The drive device provides the statusword, which is consumed by the control device.6.4.2 I/O dataThe status values are given in Table 8. The command values are given in Table 9.Table 8 — Status values for the basic drive FEIEC name CANopen name Details ReferenceOperating Operation enabled Bits 0 to 6 in Object 6041 00h See /CiA402-2/Table 9 — Command values for the basic drive FEIEC name CANopen name Details ReferenceOperate Start (reset) command Bits 0 to 3 and bit 7 in Object 6040 00h See /CiA402-2/6.4.3 StatesThe PDS FSA defined in detail in /CiA402-2/ specifies the possible control sequence of the drive device. A single state represents a special behaviour. The state also determines, which commands are accepted; e.g. it is only possible to start a point-to-point move when the drive is in the operation-enable state. States may be changed using the controlword and/or according to internal events.6.4.4 ParametersThe drive device’s behaviour may be configured by means of parameters via the network. The CiA 402 profile defines parameters to select the mode of operations among many others. Table 10 shows some of these parameters defined in /CiA402-2/.Table 10 — Basic drive FE parametersIEC name CANopen name Details Reference Mode command Modes of operation Object 6060 00h See /CiA402-2/Mode status Modes of operation display Object 6061 00h See /CiA402-2/- Abort connection option code Object 6007 00h See /CiA402-2/- Quick stop option code Object 605A 00h See /CiA402-2/- Shutdown option code Object 605B 00h See /CiA402-2/- Disable operation mode code Object 605C 00h See /CiA402-2/- Halt option code Object 605D 00h See /CiA402-2/- Fault reaction option code Object 605E 00h See /CiA402-2/6.5 Optional application functions FE6.5.1 GeneralThe CiA 402 profile defines optionally a position feedback interface. The position feedback information is accessible via the network interface.The drive device may provide digital inputs and outputs readable respectively writable via the network.6.5.2 I/O dataThe used communication services for transmitting the position feedback information as well as the digital inputs and outputs are network technology dependent.6.5.3 ParametersThe parameters of the optional application functions FE are listed in Table 11.Table 11 — Optional application functions FE parametersCANopen name Details ReferencePosition actual internal value Object 6063 00h See /CiA402-2/Velocity sensor actual value Object 6069 00h See /CiA402-2/Sensor selection code Object 606A 00h See /CiA402-2/Position encoder resolution Object 608F 00h See /CiA402-2/Velocity encoder resolution Object 6090 00h See /CiA402-2/Digital inputs Object 60FD 00h See /CiA402-2/Digital outputs Object 60FE 00h See /CiA402-2/7 Application modes7.1 GeneralThe drive device compliant to /CiA402-2/ may function as servo controller, frequency converter, or stepper motor. It shall support one, and may support several or all of the defined modes of operation. Besides those pre-defined modes of operation, the user may configure other application behaviour.The application modes supported are listed in Table 12.Table 12 — Supported application modesIEC 61800-7 application mode Equivalent CiA 402 mode of operation Torque control with optional feedback Profile torque mode,Cyclic sync torque modeVelocity preset Velocity modeVelocity control with optional feedback Profile velocity mode,Cyclic sync velocity modePosition preset Profile position modePosition control with optional feedback Interpolated position mode,Cyclic sync position modeThe network communication messages used for the transmission of process data are network technology dependent. They may be different for servo controller, frequency inverter, and stepper motors.7.2 Torque controlA drive device in torque mode may use the process data given in Table 13 and the configuration parameters given in Table 14.Table 13 — I/O data for profile torque modeIEC 61800-7 I/O data Equivalent CiA 402 process dataCommand Controlword (6040 00h)Status Statusword (6041 00h)Torque set point Target torque (6071 00h)Actual torque Torque actual value (6077 00h)Table 14 — Parameter for profile torque modeIndex and sub-index CiA 402 configuration object6072 00h Max torque6073 00h Max current6074 00h Torque demand value6075 00h Motor rated current6076 00h Motor rated torque6078 00h Current actual value6079 00h DC link circuit voltage6087 00h Torque slope6088 00h Torque profile type60F8 XX h Torque control parametersA drive device in cyclic sync torque mode may use the process data given in Table 15 and the configuration parameters given in Table 16.Table 15 — I/O data for cyclic sync torque modeIEC 61800-7 I/O data Equivalent CiA 402 process dataCommand Controlword (6040 00h)Status Statusword (6041 00h)Torque set point Target torque (6071 00h)Actual torque Torque actual value (6077 00h)Table 16 — Parameter for cyclic sync torque modeIndex and sub-index CiA 402 configuration object6072 00h Max torque6076 00h Motor rated torque6080 00h Max motor speed60B2 00h Torque offset60C2 XX h Interpolation time period7.3 Velocity controlA drive device in velocity mode may use the process data given in Table 17 and the configuration parameters given in Table 18.Table 17 — I/O data for velocity modeIEC 61800-7 I/O data Equivalent CiA 402 process dataCommand Controlword (6040 00h)Status Statusword (6041 00h)Velocity set point Target velocity (vl) (6042 00h)Actual velocity vl velocity actual value (6044 00h)Table 18 — Parameter for velocity modeIndex and sub-index CiA 402 configuration object6043 00h vl velocity demand6048 XX h vl velocity acceleration6049 XX h vl velocity deceleration604A XX h vl velocity quick stop604B XX h vl set-point factor604C XX h vl dimension factor6050 00h vl slow down time6051 00h vl quick stop timeA drive device in profile velocity mode may use the process data given in Table 19 and the configuration parameters given in Table 20.Table 19 — I/O data for profile velocity modeIEC 61800-7 I/O data Equivalent CiA 402 process dataCommand Controlword (6040 00h)Status Statusword (6041 00h)Velocity set point Target velocity (pv) (60FF 00h)Actual velocity Velocity actual value (606C 00h)Table 20 — Parameter for profile velocity modeIndex and sub-index CiA 402 configuration object6069 00h Velocity sensor actual value606A 00h Sensor selection mode606B 00h Velocity demand value606D 00h Velocity window606E 00h Velocity window time606F 00h Velocity threshold time60F8 00h Max slippage6071 00h Target torque6072 00h Max torque607E 00h Polarity607F 00h Max motor velocity6080 00h Max motor speed6083 00h Profile acceleration6084 00h Profile deceleration6085 00h Quick stop deceleration6086 00h Motion profile typeA drive device in cyclic sync velocity mode may use the process data given in Table 21 and the configuration parameters given in Table 22.Table 21 — I/O data for cyclic sync velocity modeIEC 61800-7 I/O data Equivalent CiA 402 process dataCommand Controlword (6040 00h)Status Statusword (6041 00h)Velocity set point Target velocity (pv) (60FF 00h)Actual velocity Velocity actual value (606C 00h)Table 22 — Parameter for cyclic sync velocity modeIndex and sub-index CiA 402 configuration object605A 00h Quick stop option code6069 00h Velocity sensor actual value6062 00h Position demand value6063 00h Position actual internal value6072 00h Max torque6076 00h Motor rated torque6077 00h Torque actual value607E 00h Polarity6080 00h Max motor speed6085 00h Quick stop deceleration6086 00h Motion profile type60B1 00h Velocity offset60B2 00h Torque offset60C2 XX h Interpolation time period7.4 Position controlA drive device in position mode may use the process data given in Table 23 and the configuration parameters given in Table 24.Table 23 — I/O data for profile position modeIEC 61800-7 I/O data Equivalent CiA 402 objectCommand Controlword (6040 00h)Status Statusword (6041 00h)Position set point Target position (607A 00h)Actual position Position actual value (6064 00h)Table 24 — Parameter for profile position modeIndex and sub-index CiA 402 configuration object607B XX h Position range limit607D XX h Software position limit607E 00h Polarity607F 00h Max profile velocity6080 00h Max motor speed6081 00h Profile velocity6082 00h End velocity6083 00h Profile acceleration6084 00h Profile deceleration6085 00h Quick stop deceleration6086 00h Motion profile type60C5 00h Max acceleration60C6 00h Max decelerationA drive device interpolated position mode may use the process data given in Table 25 and the configuration parameters given in Table 26.Table 25 — I/O data for interpolated position modeIEC 61800-7 I/O data Equivalent CiA 402 objectCommand Controlword (6040 00h)Status Statusword (6041 00h)Position set point Position demand value (6062 00h)Actual position Position actual internal value (6063 00h)Table 26 — Parameter for interpolated position modeIndex and sub-index CiA 402 configuration object606A 00h Sensor selection code607F 00h Max profile velocity608F XX h Position encoder resolution6090 XX h Velocity encoder resolution6091 XX h Gear ratio6092 XX h Feed constant60C0 00h Interpolation sub mode select60C1 XX h Interpolation data record60C2 XX h Interpolation time period60C3 XX h Interpolation sync definition60C4 XX h Interpolation data configuration60C5 00h Max acceleration60C6 00h Max decelerationA drive device in cyclic sync position mode may use the process data given in Table 27 and the configuration parameters given in Table 28.Table 27 — I/O data for cyclic sync position modeIEC 61800-7 I/O data Equivalent CiA 402 objectCommand Controlword (6040 00h)Status Statusword (6041 00h)Position set point Target position (607A 00h)Actual position Position actual value (6064 00h)Table 28 — Parameter for cyclic sync position modeIndex and sub-index CiA 402 configuration object605A 00h Quick stop option code6063 00h Position actual internal value6065 00h Following error window6066 00h Following error time out6069 00h Velocity sensor actual value606C 00h Velocity actual value6072 00h Max torque6076 00h Motor rated torque6077 00h Torque actual value607B XX h Position range limit607D XX h Software position limit607E 00h Polarity6080 00h Max motor speed6085 00h Quick stop deceleration6086 00h Motion profile type60B0 00h Position offset60B1 00h Velocity offsetIndex and sub-index CiA 402 configuration object 60B2 00h Torque offset60C2 XX h Interpolation time period60F4 00h Following error actual value60FA 00h Control effortCiA 402 version 3.0Drives and motion control device profilePart 1: General definitionsCORRIGENDUM 109 September 2010! CAN in Automation (CiA) e. V.Page 4, 3.1:Add at the end of the clause:The abbreviations given in /CiA301/ and /IEC61800-7-1/ apply for this specification, too. Page 4, 3.2:Add the definition for “Local signal” in alphabetical order:Local signalSignal generated by the drive derived from an event except the commands received from the network. Local signal may be caused for example by:- an analog or digital input- switching of the high-level power- a device-internal failurePage 10, 7.2:Delete last line in Table 14:Object 60F8 XX hPage 11,7.3:Replace in Table 17 the name “Target velocity (vl)” of the object 6042h with:vl target velocityDelete two last lines in Table 18:Objects 6050h and 6051hAdd a line to Table 18 after the object 6043h:Object 6046h “vl velocity min max amount”。
$.operate js用法 -回复

$.operate js用法-回复如何使用 .operate js 方法.operate 是jQuery 的一个扩展方法,可以用于简化在DOM 上执行常见操作的过程。
它提供了一种简洁而强大的方式来处理创建、修改和删除DOM 元素的动作。
在本文中,我们将一步一步地介绍如何使用 .operate js 方法。
第一步:引入jQuery首先,我们需要在HTML 页面中引入jQuery 库。
你可以通过以下方式之一来完成这个步骤:1. 本地引入:在HTML 页面中添加以下代码:<script src="2. 通过CDN 引入:在HTML 页面中添加以下代码:<script src="确保jQuery 被正确引入后,我们可以继续下一步。
第二步:了解 .operate 方法的基本结构在使用 .operate 方法之前,我们需要了解它的基本结构。
它包含以下几个参数:- operator: 表示操作类型,可以是create、update 或delete。
- url: 表示要发送AJAX 请求的目标URL。
- data: 表示要传递的数据,可以是JSON 对象或字符串。
- callback: 表示AJAX 请求成功后的回调函数。
基本的 .operate 方法结构如下所示:.operate(operator, url, data, callback);在我们实际使用 .operate 方法之前,我们需要定义一些DOM 元素并为它们分别添加一些事件处理程序。
第三步:使用 .operate 方法创建DOM 元素创建DOM 元素是开发中常见的操作之一。
在这个例子中,我们将使用 .operate 方法来创建一个按钮并将其添加到一个容器中。
首先,在HTML 页面中添加一个容器元素:<div id="container"></div>接下来,在JavaScript 代码中使用 .operate 方法来创建一个按钮并将其添加到容器中:(document).ready(function() {.operate('create', '#container', '<button id="myButton">Click me!</button>', function() {console.log('Button created.');});});这个例子中的代码会在页面加载完毕后执行。
mongodb中$function的用法
mongodb中$function的用法在MongoDB中,`$function` 是用于在聚合管道中执行JavaScript 函数的运算符。
它允许你在聚合管道中执行自定义的JavaScript 代码。
这个运算符通常与`$expr` 运算符一起使用,以便在聚合管道中引用JavaScript 函数。
以下是`$function` 的基本用法:```json{$function: {body: function,args: [arg1, arg2, ...],lang: "js"}}```- `body`: JavaScript 函数的主体。
- `args`: 传递给JavaScript 函数的参数数组。
- `lang`: 语言,通常设置为"js" 表示JavaScript。
例如,假设你有一个包含文档如下的集合:```json[{ "_id": 1, "value": 10 },{ "_id": 2, "value": 20 },{ "_id": 3, "value": 30 }]```你可以使用`$function` 来将每个文档的值加倍:```jsondb.collection.aggregate([{$project: {doubledValue: {$function: {body: function(value) {return value * 2;},args: ["$value"],lang: "js"}}}}])```在上面的例子中,`$function` 接受一个JavaScript 函数,该函数接受一个参数`$value`,然后返回`$value` 的两倍。
这个函数通过`$project` 阶段应用于每个文档,并创建一个新的字段`doubledValue`。
oracle function 语法
Oracle Function 语法Oracle Function 是一种可重用的程序单元,它接受输入参数并返回一个值。
Function 可以在 SQL 查询中使用,也可以在 PL/SQL 块中调用。
本文将详细介绍Oracle Function 的语法,包括创建和使用 Function 的步骤,以及一些常用的用法和示例。
创建 Function在 Oracle 中,创建 Function 需要使用CREATE FUNCTION语句。
下面是创建Function 的基本语法:CREATE [OR REPLACE] FUNCTION function_name[ (parameter_name [IN | OUT | IN OUT] data_type [, ...]) ]RETURN return_data_type[DETERMINISTIC]{IS | AS}[PRAGMA AUTONOMOUS_TRANSACTION;]BEGIN-- Function 的逻辑代码RETURN return_value;END;•CREATE FUNCTION:创建 Function 的关键字。
•OR REPLACE:可选项,表示如果 Function 已经存在,则替换它。
•function_name:Function 的名称,遵循标识符的命名规则。
•parameter_name:可选项,Function 的输入参数名称。
•IN | OUT | IN OUT:可选项,指定参数的传递方式。
默认为IN,表示参数是输入参数。
•data_type:参数的数据类型。
•RETURN return_data_type:指定 Function 的返回值数据类型。
•DETERMINISTIC:可选项,表示 Function 的结果只依赖于输入参数,没有其他影响。
•IS | AS:Function 的逻辑代码开始的关键字。
•PRAGMA AUTONOMOUS_TRANSACTION;:可选项,表示 Function 可以在独立的事务中执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
|λk − λj |2 ,
(1.1)
C denoting the normalization. (Throughout the symbol C will be used to denote some constant, i.e. a quantity 2 independent of the primary variable(s) of the equation.) The choice g (x) = e−x , which is realized by choosing √ each diagonal element of X independently from the normal distribution N[0, 1/ 2], and each off diagonal independently with distribution N[0, 1/2] + iN[0, 1/2], is referred to as the Gaussian Unitary Ensemble (GUE) and is the main focus of the present article. Specifically our interest is in the distribution of the largest eigenvalue, and the average values of powers (integer and fractional) of the characteristic polynomial N l=1 (λ − λl ) for such matrices. Let EN (0; (s, ∞)) denote the probability that there are no eigenvalues in the interval (s, ∞) for N × N GUE matrices. The distribution of the largest eigenvalue pmax (s) is given in terms of EN (0; (s, ∞)) by pmax (s) = d EN (0; (s, ∞)). ds (1.2)
Contents 1. Introduction and Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2. τ -Function Theory for PIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1 2.2 2.3 2.4 3.1 3.2 3.3 3.4 3.5 Affine Weyl group symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Toda lattice equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Classical solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B¨ acklund transformations and discrete Painlev´ e systems . . . . . . . . . . . . . . . . . . . . . . . Affine Weyl group symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Toda lattice equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Classical solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B¨ acklund transformations and discrete dPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Coalescence from PIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 6 6 10 12 15 18 18 21 22 23 24 25
2
P.J. Forrester, N.S. Witte
˜N (s; a) . . . 4.1 Calculation of EN (0; (s, ∞)) and E 4.2 Calculation of FN (s; a) . . . . . . . . . . . . . . 4.3 UN (t; a) and VN (t; a) as Painlev´ e transcendents 5. Edge Scaling in the GUE . . . . . . . . . . . . . . . ˜ soft (s; a) . . . . . 5.1 Calculation of E soft (s) and E 5.2 Calculation of F soft (λ; a) . . . . . . . . . . . . . 6. Conclusions - A Programme . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . .
3. τ -Function Theory for PII . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4. Application to Finite GUE Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
25 28 31 31 31 34 37 38
1. Introduction and Summary Hermitian random matrices X with a unitary symmetry are defined so that the joint distribution of the independent elements P (X ) is unchanged by the similarity transformation X → U † XU for U unitary. For example, an N ∞ ensemble of matrices with P (X ) := exp j =0 αj Tr(X j ) =: j =1 g (λj ) for general g (x) ≥ 0 possesses a unitary symmetry. Such ensembles have the property that the corresponding eigenvalue probability density function p(λ1 , . . . , λN ) is given by the explicit functional form 1 p(λ1 , . . . , λN ) = C
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
P.J. Forrester1 , N.S. Witte1,2
1
2
Department of Mathematics and Statistics, University of Melbourne, Victoria 3010, Australia. E-mail: P.Forrester@.au E-mail: N.Witte@.au, School of Physics, University of Melbourne, Victoria 3010, Australia.
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
Communications in Mathematical Physics manuscript No. (will be inserted by the editor)