arm外部中断笔记
ARM7(sc44b0)外部中断笔记

ARM7(sc44b0)外部中断笔记对于sc44b0它也是一种单片机,一种比较高级的单片机而已,所以他也跟51单片机一样有外部中断,不同51单片机的是,他有8个外部中断源,对应的是8个管脚,(51只有两个,int0和int1,P3.3和P3.4),分别是Port G八个管脚。
而对于外部中断4 \5\6\7很多都是共用寄存器,他们是通过或逻辑公用一个中断请求线。
下面就具体来说说使用外部中断的一些必要的配置。
一,对管脚的配置,因为Port G有三种功能用法,要通过对rPCONG(端口G配置寄存器)的配置来选用Port G的外部中断的功能。
其配置表如下所以应该将其配置为11(设置为中断功能状态);二,中断模式的选择,中断模式有两种,FIQ(快速中断模式)和 IRQ(中断模式)两种,一般没有特殊要求都用IRQ模式即可。
可以通过对中断模式寄存器rINTMOD配置获得。
如表下三,是否允许中断,即中断使能位。
通过对中断控制寄存器INTCON的配置即可,如表下通过对中断控制寄存器的配置即可,可以看出只要让intcon的【1】位置零即可使中断使能。
四,外部中断方式的选择,低电平或上升沿触发呢,还是别的,这就要对外部中断方式寄存器(EXTINT)的配置,其表如下由上表可知,如果要用下降沿触发,就可将EXTINT 的值给0x22222222;将所有的外部中断都设置为下降沿触发。
五,当中断捕抓到以后,要引起什么变化呢?或者说用什么来捕抓呢?在sc44b0中用了两个寄存器来捕抓,一个中断挂起寄存器(INTPND),和外部中断挂起寄存器(EXINTPND),一开始不明白挂起是什么意思,后来才懂,差不多就相当与51单片机的标志位一样,当中断发生后,就将挂起寄存器的对应的某一位置一或置零,外部中断挂起寄存器如表下中断挂起寄存器:当中断产生后,是将INTPND的【21】位置一的;所以,判断有无外部中断,就可以通过读取挂起寄存器对应的为,即可知道是否有无中断。
ARM体系中异常中断种类及处理办法
ARM 体系中异常中断种类及处理办法在ARM 体系中,通常有以下3 种方式控制程序的执行流程:
•在正常程序执行过程中,每执行一条ARM 指令,程序计数器寄存器(PC)的值加4 个字节;每执行一条Thumb 指令,程序计数器寄存器(PC)的值加2 个字节。
整个过程是顺序执行。
•通过跳转指令,程序可以跳转到特定的地址标号处执行,或者跳转到特定的子程序处执行。
其中,B 指令用于执行跳转操作;BL 指令在执行跳转操作的同时,保存子程序的返回地址;BX 指令在执行跳转操作的同时,根据目标地址的最低位可以将程序状态切换到Thumb 状态;BLX 指令执行3 个操作:跳转到目标地址处执行,保存了子程序的返回地址,根据目标地址的最低位可以将程序状态切换到Thumb 状态。
•当异常中断发生时,系统执行完当前指令后,将跳转到相应的异常中断处理程序处执行。
在当异常中断处理程序执行完成后,程序返回到发生中断的指令的下一条指令处执行。
在进入异常中断处理程序时,要保存被中断的程序的执行现场,在从异常中断处理程序退出时,要恢复被中断的程序的执行现场。
ARM的异常处理学习笔记转贴
ARM 的异常处理学习笔记转贴ARM的异常处理这部分比较不好理解。
当异常中断发生时,系统执行完当前指令后,将跳转到相应的异常中断处理程序处执行。
当异常中断处理程序执行完成后,程序返回到发生中断指令的下条指令处执行。
在进入异常中断处理程序时,要保存被中断程序的执行现场,从异常中断处理程序退出时,要恢复被中断程序的执行现场。
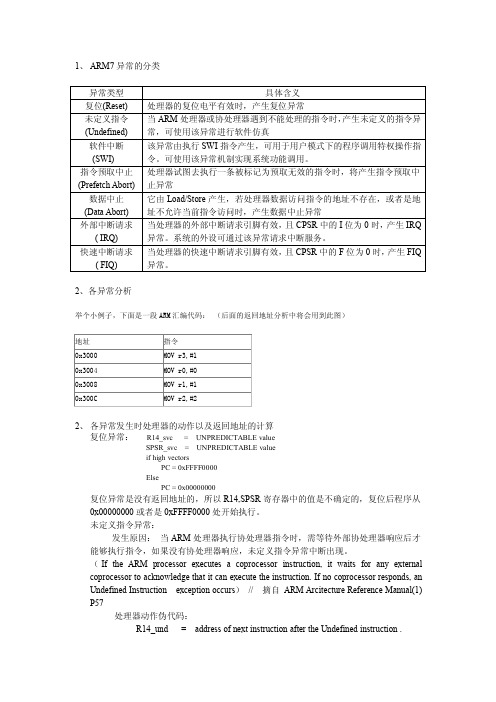
1、引起异常的原因(1)、指令执行引起的异常软件中断、未定义指令(包括所要求的协处理器不存在是的协处理器指令)、预取址中止(存储器故障)、数据中止。
(2)、外部产生的中断复位、FIQ、IRQ。
2、ARM中异常中断的种类(1)、复位(RESET)a、当处理器复位引脚有效时,系统产生复位异常中断,程序跳转到复位异常中断处理程序处执行,包括系统加电和系统复位。
b、通过设置PC跳转到复位中断向量处执行称为软复位。
(2)、未定义的指令当ARM处理器或者是系统中的协处理器认为当前指令未定义时,产生未定义的指令异常中断,可以通过改异常中断机制仿真浮点向量运算。
(3)、软件中断这是一个由用户定义的中断指令(SWI)。
可用于用户模式下的程序调用特权操作指令。
在实时操作系统中可以通过该机制实现系统功能调用。
(4)、指令与取终止(Prefech Abort)如果处理器预取的指令的地址不存在,或者该地址不允许当前指令访问,当被预取的指令执行时,处理器产生指令预取终止异常中断。
(5)、数据访问终止(DATAABORT)如果数据访问指令的目标地址不存在,或者该地址不允许当前指令访问,处理器产生数据访问终止异常中断。
(6)、外部中断请求(IRQ)当处理器的外部中断请求引脚有效,而且CPSR的寄存器的I控制位被清除时,处理器产生外部中断请求异常中断。
系统中个外设通过该异常中断请求处7)、快速中断请求(FIQ) 理服务。
(当处理器的外部快速中断请求引脚有效,而且CPSR的F控制位被清除时,处理器产生外部中断请求异常中断。
不同CPU中断技术对比
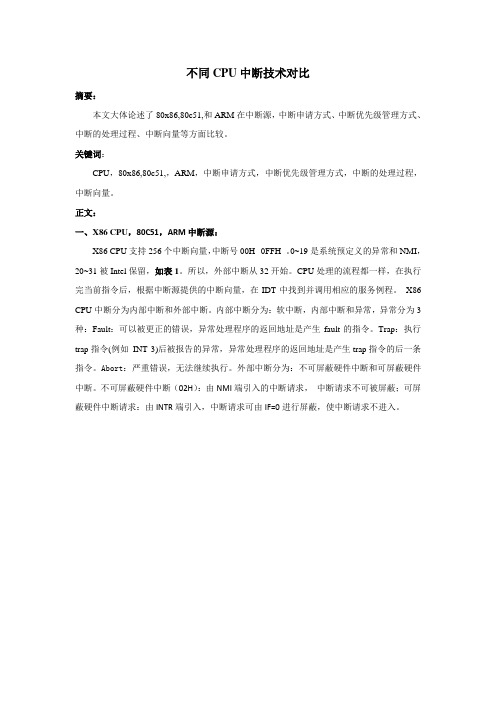
不同CPU中断技术对比摘要:本文大体论述了80x86,80c51,和ARM在中断源,中断申请方式、中断优先级管理方式、中断的处理过程、中断向量等方面比较。
关键词:CPU,80x86,80c51,,ARM,中断申请方式,中断优先级管理方式,中断的处理过程,中断向量。
正文:一、X86 CPU,80C51,ARM中断源:X86 CPU支持256个中断向量,中断号00H--0FFH 。
0~19是系统预定义的异常和NMI,20~31被Intel保留,如表1。
所以,外部中断从32开始。
CPU处理的流程都一样,在执行完当前指令后,根据中断源提供的中断向量,在IDT中找到并调用相应的服务例程。
X86 CPU中断分为内部中断和外部中断。
内部中断分为:软中断,内部中断和异常,异常分为3种:Fault:可以被更正的错误,异常处理程序的返回地址是产生fault的指令。
Trap:执行trap指令(例如INT 3)后被报告的异常,异常处理程序的返回地址是产生trap指令的后一条指令。
Abort:严重错误,无法继续执行。
外部中断分为:不可屏蔽硬件中断和可屏蔽硬件中断。
不可屏蔽硬件中断(02H):由NMI端引入的中断请求,中断请求不可被屏蔽;可屏蔽硬件中断请求:由INTR端引入,中断请求可由IF=0进行屏蔽,使中断请求不进入。
表180C51的中断系统包括中断源、中断允许寄存器IE、中断优先级寄存器IP、中断矢量等。
在80C51中,只有两级中断优先级。
图1是80C51的中断系统结构示意图。
80C51有5个中断源分别为:两个外部中断源INT0、INT1和三个内部中断源T0、T1定时/计数谥出中断源和串行口发送或接收中断源。
外部中断是由外部信号引起的,它们的中断请求信号分别从引脚INT0和INT1上引入图1ARM 7TDMI具有常规中断(IRQ)、快中断(FIQ)和软件中断(SoftWare Interrupt)三种中方式。
常规中断和快中断都是硬件中断。
外部中断详解

7.1EXTI外部按键中断实验前面我们学习了,LED灯和按键。
实际上对于STM32来说,我们是学习了它的外设GPIO。
这一节我们前面学习的内容,学习STM32的EXTI (External interrupt),即外部中断。
前面的按键章节中,我们检测按键是否被按下的方式是轮询检测的方式,这里我们改为使用中断检测的方式,提高CPU的效率。
7.1.1什么是中断单片机中断系统的概念:什么是中断,我们从一个生活中的例程引入。
比如说你在做A 事,但是突然间来了你想起来了更重要的B事,所以你马上去做B事了,做完之后再回来继续做A事,这个就是中断。
7.1.2什么是单片机的中断?当CPU正在执行一个任务,但突然又发生了一个更高级的任务,CPU必须立即去执行的任务,所以CPU必须中断当前的任务,并保存该任务已经执行的状态和相关信息,然后转而去执行那个更加高级的任务,因此就引入了“中断”这个概念。
中断是指计算机在执行程序的过程中,当出现异常情况或特殊请求时,计算机停止现行程序的运行,转向对这些异常情况或特殊请求的处理,处理结束后再返回现行程序的间断处,继续执行原程序。
中断是单片机实时地处理内部或外部事件的一种内部机制。
当某种内部或外部事件发生时,单片机的中断系统将迫使CPU暂停正在执行的程序,转而去进行中断事件的处理,中断处理完毕后,又返回被中断的程序处,继续执行下去。
在程序里面也是一样的。
举个例子可能会容易懂点,定时中断:比如你定时1ms,主程序在运行,每当1ms时间到后,就跑到定时中断子程序里面执行,执行完后再回到主程序(中断程序是1ms中断一次)。
那对于整个系统来说中断能实现什么好处呢?下面我们给以说明:1)提高了CPU的效率CPU是计算机的指挥中心,它与外围设备(如按键、显示器等)通讯的方法有查询和中断2种:查询的方法是无论外围IO是否需要服务,CPU每隔一段时间都要依次查询一遍,这种方法CPU需要花费一些时间在做查询服务工作。
Stm32中断优先级相关概念与使用笔记
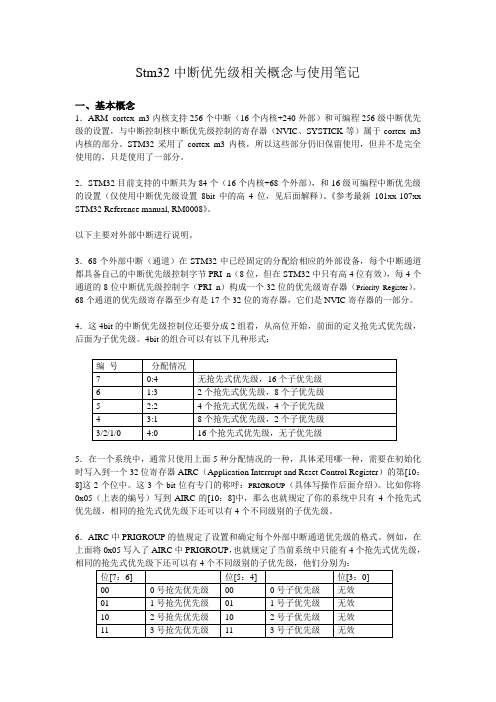
Stm32中断优先级相关概念与使用笔记一、基本概念1.ARM cortex_m3内核支持256个中断(16个内核+240外部)和可编程256级中断优先级的设置,与中断控制核中断优先级控制的寄存器(NVIC、SYSTICK等)属于cortex_m3内核的部分。
STM32采用了cortex_m3内核,所以这些部分仍旧保留使用,但并不是完全使用的,只是使用了一部分。
2.STM32目前支持的中断共为84个(16个内核+68个外部),和16级可编程中断优先级的设置(仅使用中断优先级设置8bit中的高4位,见后面解释)。
《参考最新101xx-107xx STM32 Reference manual, RM0008》。
以下主要对外部中断进行说明。
3.68个外部中断(通道)在STM32中已经固定的分配给相应的外部设备,每个中断通道都具备自己的中断优先级控制字节PRI_n(8位,但在STM32中只有高4位有效),每4个通道的8位中断优先级控制字(PRI_n)构成一个32位的优先级寄存器(Priority Register)。
68个通道的优先级寄存器至少有是17个32位的寄存器,它们是NVIC寄存器的一部分。
4.这4bit的中断优先级控制位还要分成2组看,从高位开始,前面的定义抢先式优先级,后面为子优先级。
4bit的组合可以有以下几种形式:5.在一个系统中,通常只使用上面5种分配情况的一种,具体采用哪一种,需要在初始化时写入到一个32位寄存器AIRC(Application Interrupt and Reset Control Register)的第[10:8]这2个位中。
这3个bit位有专门的称呼:PRIGROUP(具体写操作后面介绍)。
比如你将0x05(上表的编号)写到AIRC的[10:8]中,那么也就规定了你的系统中只有4个抢先式优先级,相同的抢先式优先级下还可以有4个不同级别的子优先级。
6.AIRC中PRIGROUP的值规定了设置和确定每个外部中断通道优先级的格式。
计算机原理实验-外部中断实验
计算机原理与应用实验实验名称:外部中断实验学院:信息与通信工程学院班级:2017211113姓名:***学号:**********同组成员姓名:李凝同组成员学号:**********一、实验目的1. 掌握NVIC 中断优先级配置。
2. 学会外部中断配置。
二、实验原理及内容(一)实验原理电路结构如图3.1 所示1. NVIC 中断优先级NVIC 是嵌套向量中断控制器,控制着整个芯片中断相关的功能,它跟内核紧密耦合,是内核里面的一个外设。
但是各个芯片厂商在设计芯片的时候会对Cortex-M4 内核里面的NVIC 进行裁剪,把不需要的部分去掉,所以说STM32 的NVIC 是Cortex-M4 的NVIC 的一个子集。
CM4 内核可以支持256个中断,包括16个内核中断和240个外部中断,256 级的可编程中断设置。
对于STM32F4 没有用到CM4 内核的所有东西,只是用到了一部分,对于STM32F40 和41 系列共有92个中断,其中有10个内核中断和82个可屏蔽中断,常用的为82个可屏蔽中断。
ISER[8]—中断使能寄存器组,用来使能中断,每一位控制一个中断,由于上面已经说明了控制82 个可屏蔽的中断,因此利用ISER[0~2]这三个32 位寄存器就够了。
一下的几个寄存器同理。
ICER[8]—中断除能寄存器组,用来消除中断。
ISPR[8]—中断挂起控制寄存器组,用来挂起中断。
ICPR[8]—中断解挂控制寄存器组,用来解除挂起。
IABR[8]—中断激活标志寄存器组,对应位如果为1 则表示中断正在被执行。
IP[240]—中断优先级控制寄存器组,它是用来设置中断优先级的。
我们只用到了IP[0]~IP[81],每个寄存器只用到了高4 位,这4 位又用来设置抢占优先级和响应优先级(有关抢占优先级和响应优先级后面会介绍到),而对于抢占优先级和响应优先级各占多少位则由AIRCR 寄存器控制,相关设置如表 3.1 所示。
学习小结--ARM7中断原理
2
3 向量地址寄存器 0-15(VICVectAddr0-15 - 0xFFFFF100-13C,读/写)
一般(以 Slot0 为例):VICVectAddr0 = (uint32)IRQ_TIME0 ;
4 向量地址寄存器(VICVectAddr - 0xFFFFF030,读/写) VICVectAddr = 0x00; // 通知 VIC 中断处理结束
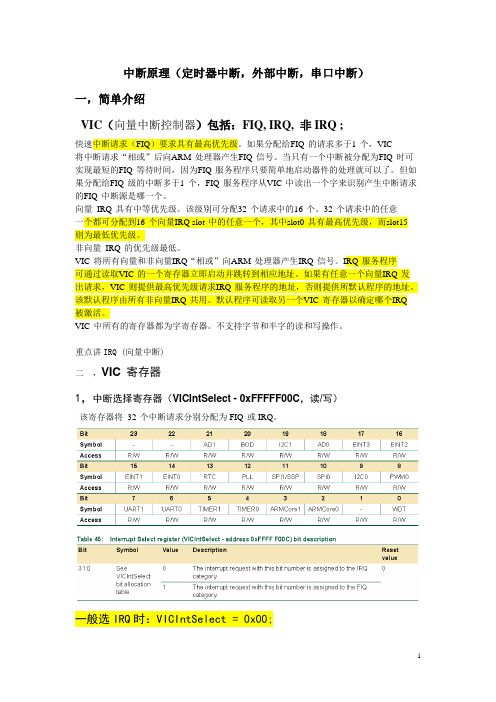
二 ,VIC 寄存器 1,中断选择寄存器(VICIntSelect - 0xFFFFF00C,读/写)
该寄存器将 32 个中断请求分别分配为 FIQ 或 IRQ。
一般选 IRQ 时:VICIntSelect = 0x00;
1
2,向量控制寄存器 0-15(VICVectCnt l0-15 - 0xFFFFF200-23C,读/写)
PINSEL0 = 0x00000000; // 设置管脚连接 GPIO IO1DIR = LED1|LED2; // 设置 I/O 为输出 IO1SET = LED1|LED2; Time1Init(); // 初始化定时器及使能中断 Time0Init(); VICIntSelect = 0x00; // 所有中断通道设置为 IRQ 中断 VICDefVectAddr = (uint32)nIRQ_TIME; VICIntEnable = time0|time1; while(1); // 等待定时器中断或定时器匹配输出 return(0); }
}
} /**************************************************************************** * 名 称:Time0Init() * 功 能:初始化定时器,定时时间为 S,并使能中断。 * 入口参数:无 * 出口参数:无 ****************************************************************************/ void Time1Init(void) {
ARM异常中断以及对ARM异常返回地址的分析
返回地址:SUBS PC,R14,#8 返回地址分析: 当进入异常时,R14_abt = address of the aborted instruction + 8
所以要返回到有问题的指令处重新执行,所以返回的地址为 R14-8 IRQ 中断异常:
产生原因: 当处理器的外部中断请求引脚有效,且 CPSR 寄存器的 I 控制位被清除 时,处理器产生外部中断 IRQ 异常。
是因为当前指令即引起软件异常中断的指令执行后所引起的,说明当前指令已近执行,当从
中断返回时,执行的指令应该是当前指令的下一条指令,即待执行指令的地址应该是 0x3004, 而 R14 中存放的即为 0x3004,所以返回时使用将 R14 的值直接赋给 PC 即可。
指令预期中止异常: 发生原因:若在指令预取阶段遇到无效指令时,系统存储器将该预取的指令标记为无
效指令,当处理器试图去执行这一条被标记为预取无效的指令时,将产生指令预取中止异常, 注意若处理器没有执行无效指令时将不会产生异常中断(在流水线中存在一条分支指令,导 致该非法指令没有执行,将不会产生该异常)。
处理器动作: R14_abt = address of the aborted instruction + 4 SPSR_abt = CPSR ….. …..
2、各异常分析
举个小例子,下面是一段 ARM 汇编代码: (后面的返回地址分析中将会用到此图)
ARM七种异常类型详解(精华版)

ARM7支持六种操作模式:(1)用户模式(usr):正常的程序执行状态(2)FIQ模式(fiq):支持数据传送或通道处理(3)IRQ模式(irq):用于通用的中断处理(4)管理模式(svc):用于操作系统的保护模式(5)异常模式(abt):数据或者指令预取异常时进入(6)无定义模式(und):当无定义指令被执行时进入(7)软件控制,外部中断,异常处理都可以改变操作模式。
大部分的应用程序在用户模式下执行。
其他模式,比如管理模式,在中断、异常服务、或者访问被保护资源时进入。
ARM 的中央寄存器集是16 个用户寄存器R0 – R15。
这些寄存器均是32 位宽度,R0 – R12 没有其他特殊功能,寄存器R13 – R15在CPU中有特殊功能。
R13被用作栈指针(stack pointer,SP)。
R14被称为链接寄存器(link register, LR),当调用一个函数时返回地址被自动保存到链接寄存器,在函数返回时有效。
这使得快速进入和返回“叶”函数(不调用其他函数的函数)成为可能。
如果函数是分支的一部分(即该函数将调用另一个函数),链接寄存器必须入栈(R13)。
R15 是程序计数器(program counter, PC)。
有趣的是,许多指令也可以在R13 – R15中执行,就像它们是标准的用户寄存器。
ARM中断的问题ARM的七种异常类型---------1> 复位异常2> 数据访问中止异常3> 快速中断请求异常4> 一般中断请求5> 预取指令异常6> 软件中断异常7> 未定义异常-------------------------问题:1> 为什么除了进入复位异常模式外,在别的异常处理模式中都允许FIQ中断?2> 数据访问中止异常的优先级大于 FIQ异常,为什么在数据访问异常处理模式中,还允许 FIQ中断?这样不就成了:在高优先级异常处理中允许低优先级的中断发生?即使这样,因为FIQ中断的优先级 < 数据异常中断优先级,也不会进入 FIQ中断处理程序啊,这样不就更没有用处了??ARM体系的各种异常的分析(学习日记)- [ARM7TDMI]版权声明:转载时请以超链接形式标明文章原始出处和作者信息及本声明/logs/10669519.html1.复位异常(1)当内核的nRESET信号被拉低时,ARM处理器放弃正在执行的指令,当nRESET信号再次变高时,ARM处理器进行复位操作;(2)系统复位后,进入管理模式对系统进行初始化,复位后,只有PC(0x00000000)和CPSR (nzcvqIFt_SVC)的值是固定的,另外寄存器的值是随机的。
ARM处理器中断处理的编程实现

ARM处理器中断处理的编程实现中断是指外部事件打断正在执行的程序,并暂时转去执行与该事件有关的处理程序。
在ARM处理器上,中断处理是通过中断向量表和中断服务程序来实现的。
下面是ARM处理器中断处理的编程实现的主要内容。
1.中断向量表的设置在ARM处理器中,中断向量表是一个保存中断服务程序地址的表。
每个中断号对应一个中断服务程序的地址,当发生中断时,处理器会跳转到相应中断号对应的中断服务程序。
中断向量表必须存储在内存中,并且要先设置好才能使得中断处理正常工作。
为了设置中断向量表,需要将每个中断号对应的中断服务程序的地址写入到相应的中断向量表项中。
具体的实现方式根据不同的ARM架构有所不同。
以ARM Cortex-M系列处理器为例,中断向量表的每个向量表项占用4个字节,存储中断服务程序的地址。
下面是使用C语言设置中断向量表的示例代码:```c//声明中断向量表typedef void (*interrupt_handler_t)(void);//中断服务程序声明void interrupt_handler1(void);void interrupt_handler2(void);...//中断向量表__attribute__ ((section(".isr_vector")))const interrupt_handler_t interrupt_vector_table[] =interrupt_handler1, // 中断号0对应的中断服务程序interrupt_handler2, // 中断号1对应的中断服务程序...```2.中断服务程序的编写中断服务程序负责处理中断的具体逻辑。
当中断发生时,处理器会跳转到对应中断号的中断服务程序进行处理。
中断服务程序必须具有固定的格式和规范,以确保在中断发生时能正常执行。
中断服务程序的编写一般包括以下几个步骤:-保存寄存器状态:由于中断服务程序会暂时打断正在执行的程序,需要在进入中断服务程序时保存当前的寄存器状态,以便中断处理完成后能够正确恢复现场。
arm处理器异常中断响应过程
arm处理器异常中断响应过程ARM处理器是一种广泛应用于移动设备、嵌入式系统和服务器等领域的处理器架构。
在运行过程中,处理器可能会遇到各种异常情况,如访问非法内存、除零错误等。
当这些异常发生时,ARM处理器需要做出相应的中断响应,以保证系统的稳定性和安全性。
ARM处理器异常中断响应的过程可以分为异常触发、异常处理和恢复执行三个阶段。
首先是异常触发阶段。
当处理器在执行指令时,发生了某种异常情况,例如访问了非法的内存地址,处理器会立即检测到异常,并将当前指令的状态保存起来。
同时,处理器会根据异常类型,确定异常向量的地址,将控制转移到异常向量所指向的地址处。
接下来是异常处理阶段。
当处理器进入异常向量所指向的地址时,会执行相应的异常处理程序。
这个程序通常是由操作系统或应用程序提供的,用于处理不同类型的异常。
在异常处理程序中,可以进行一系列的操作,例如保存现场、记录异常信息、处理异常原因等。
处理程序还可以根据需要选择继续执行或终止当前指令。
最后是恢复执行阶段。
在异常处理程序执行完毕后,处理器会根据异常返回地址,将控制权返回到引发异常的指令处,继续执行后续指令。
在返回之前,处理器可能会进行一些必要的恢复操作,如恢复现场、清除异常状态等。
这样,系统就可以继续正常运行,不受异常的影响。
需要注意的是,ARM处理器还提供了一些特殊的异常处理方式,如中断(Interrupt)和陷阱(Trap)。
中断是外部设备触发的异常,用于异步事件的处理,例如外部设备的输入输出请求。
陷阱是由程序主动触发的异常,用于实现系统调用和调试功能。
这些异常的触发和处理方式与一般异常略有不同,但整体的处理过程仍然符合前述的异常中断响应流程。
在ARM处理器中,异常中断响应是保证系统正常运行和异常处理的关键环节。
通过合理的异常处理程序和恢复机制,可以有效地应对各种异常情况,提高系统的可靠性和稳定性。
同时,开发人员也需要根据具体应用场景和需求,灵活地配置和调整异常处理方式,以满足不同的需求。
第八章 外部中断
EXTPOLAR[0] = 1 EXTMODE[0] = 0 上升沿 EINT0 0 1 电平 中断 边沿 中断 0 1 0 1 低电平中断 高电平中断 外 部 中 断 0
ARM 处理器核
系统控制模块功能汇总
• 寄存器汇总
名称 EXTINT EXTMODE EXTPOLAR 描述 外部中断标志寄存器 外部中断方式寄存器 外部中断极性寄存器 访问 R/W R/W R/W 复位值 0 0 0
外部中断输入
• 寄存器汇总
可以通过设置 PINSELx EXTPOLAR 寄存器选择对应引脚为外部中 和EXTMODE确定外部中断 有效中断信号设置中断标志。 可以控制把CPU 从掉电模式唤醒。 断输入引脚。 的触发信号。
LPC1700系列ARM的电平中断可以设置为高电平触发和 低电平触发。 当EXTPOLAR[0] = 0时,外部中断0设置为低电平触发。 当EXTPOLAR[0] = 1时,外部中断0设置为高电平触发。
EXTPOLAR[0] = 1 EXTMODE[0] = 0 高电平 EINT0 0 1 电平 中断 边沿 中断 0 1 0 1 低电平中断 高电平中断 外 部 中 断 0
上升沿
下降沿中断
上升沿中断
VIC
注意:这里仅以EINT0为例来进行讲解,EINT1~EINT3与之类似,此处不再重复。
外部中断输入
• 电平中断设置
LPC1700系列ARM的电平中断可以设置为高电平触发和 低电平触发。 当EXTPOLAR[0] = 0时,外部中断0设置为低电平触发。 当EXTPOLAR[0] = 1时,外部中断0设置为高电平触发。
ARM中断程序的原理和实现
ARM中断程序的原理和实现中断是计算机系统中的一种强制性事件,它能够暂停正在执行的程序,并立即转移到一个特殊的处理程序上去执行。
ARM架构的处理器也支持中断机制,为了正确处理中断,ARM定义了一套中断处理的规范和流程。
本文将介绍ARM中断的原理和实现。
一、ARM中断的原理1. 中断请求(Interrupt Request, IRQ):外部设备或其它条件触发的一种中断请求信号,用于向处理器报告需要进行中断处理的事件。
2. 中断服务例程(Interrupt Service Routine,ISR):是一段特殊的程序代码,用于处理中断事件。
当中断被触发后,处理器会跳转到对应的中断服务例程中执行,完成相应的中断处理逻辑。
3. 中断控制器(Interrupt Controller):负责接收处理器的中断请求,并将其派发给对应的中断服务例程。
1.外设或其它条件触发中断请求,发送中断信号给中断控制器。
2.中断控制器接收到中断请求后,对中断请求进行优先级判断,确定哪个中断请求最先被处理。
3.中断控制器将中断请求发送给处理器,并将处理器的执行流转移到中断服务例程上。
4.处理器执行中断服务例程,处理相应的中断事件。
5.中断服务例程执行完毕后,处理器返回到中断发生前的状态,继续执行原程序。
二、ARM中断的实现1.配置中断控制器ARM架构提供了多种中断控制器,如VIC(Vectored Interrupt Controller)和GIC(Generic Interrupt Controller)等。
具体的中断控制器的选择和配置方式根据具体的处理器和系统架构而定。
配置中断控制器的基本步骤如下:(1)开启中断:通过设置相关的寄存器,使能中断功能。
(2)配置中断优先级:对不同中断请求进行优先级的设置,确保高优先级的中断能够被及时处理。
(3)分配中断服务例程:将不同的中断请求与相应的中断服务例程关联起来,当中断请求触发时,中断服务例程能够被正确执行。
ARMCortex-M3权威指南-中断和异常(2)

ARMCortex-M3权威指南-中断和异常(2)中断和异常它⽀持16-4-1=11 种系统异常(同步)(保留了 4+1 个档位),外加 240 个外部中断输⼊(异步)。
在 CM3 中取消了 FIQ 的概念(v7 前的ARM 都有这个 FIQ,快中断请求),这是因为有了更新更好的机制——中断优先级管理以及嵌套中断⽀持,它们被纳⼊ CM3 的中断管理逻辑中。
因此,⽀持嵌套中断的系统就更容易实现 FIQ。
虽然 CM3 是⽀持 240 个外中断的,但具体使⽤了多少个是由芯⽚⽣产商决定。
CM3还有⼀个NMI(不可屏蔽中断)输⼊脚。
当它被置为有效(assert)时, NMI 服务例程会⽆条件地执⾏。
NMI 究竟被拿去做什么,还要视处理器的设计⽽定。
在多数情况下, NMI 会被连接到⼀个看门狗定时器,有时也会是电压监视功能块,以便在电压掉⾄危险级别后警告处理器。
向量表当 CM3 内核响应了⼀个发⽣的异常后,对应的异常服务例程(ESR)就会执⾏。
为了决定 ESR 的⼊⼝地址, CM3 使⽤了“向量表查表机制”。
这⾥使⽤⼀张向量表。
向量表其实是⼀个 WORD(32 位整数)数组,每个下标对应⼀种异常,该下标元素的值则是该 ESR 的⼊⼝地址。
向量表在地址空间中的位置是可以设置的,通过 NVIC 中的⼀个重定位寄存器来指出向量表的地址。
在复位后,该寄存器的值为 0。
因此,在地址 0 处必须包含⼀张向量表,⽤于初始时的异常分配。
举个例⼦,如果发⽣了异常 11(SVC),则 NVIC 会计算出偏移移量是11x4=0x2C,然后从那⾥取出服务例程的⼊⼝地址并跳⼊。
要注意的是这⾥有个另类: 0 号类型并不是什么⼊⼝地址,⽽是给出了复位后MSP 的初值。
CM3允许向量表重定位即从其它地址处开始执⾏各异常向量。
这些地址对应的区域可以是代码区,但也可以是 RAM 区。
在 RAM区就可以修改向量的⼊⼝地址了。
为了实现这个功能, NVIC中有⼀个寄存器,称为“向量表偏移量寄存器”(在地址 0xE000_ED08 处),通过修改它的值就能定位向量表。
(转)ARM汇编学习笔记——MRS和MSR指令

(转)ARM汇编学习笔记——MRS和MSR指令MRS,状态寄存器传送⾄通⽤寄存器类指令功能:将状态寄存器的内容传送⾄通⽤寄存器。
格式:MRS{<条件码>}Rd,CPSR}SPSR其中:Rd ⽬标寄存器,Rd不允许R15。
R=0 将CPSR中的内容传送⽬的寄存器。
R=1 将SPSR中的内容传送⾄⽬的寄存器。
注释:MRS与MSR配合使⽤,作为更新PSR的读-修改-写序列的⼀部分。
例如:改变处理器或清除标志Q。
注意:当处理器在⽤户模式或系统模式下,⼀定不能试图访问SPSR这条指令不影响条件码标志。
例:MRS R0,CRSR ;将CPSR中的内容传送⾄R0MRS R3,SPSR ;将SPSR中的内容传送⾄R3MSR,通⽤寄存器传送⾄状态寄存器传送指令功能:将通⽤寄存器的内容传送⾄状态寄存器。
格式:MSR{<条件码>CPSR_f|SPSR_f,<#immed_8r>MSR{<条件码>CPSR_<field>|SPSR_<field>,Rm其中:<field>字段可以是以下之⼀或多种:(位从右到左)C:控制域屏蔽字段(PSR中的第0位到第7位);X:扩展域屏蔽字段(PSR中的第8位到第15位);S:状态域屏蔽字段(PSR中的第16位到第32位);F:标志域屏蔽字段(PSR中的第24位到第31位)。
immed_8r 值数字常量的表达式。
常量必须对应8位位图。
该位图在32位字中循环移位偶数数位。
Rm 源寄存器。
注释:同前⼀条指令(MRS)。
例1:设置N、Z、C、V标志。
MSR CPSR_f,#&f0000000 ;仅⾼位有效,其他必须为0例2:仅置位C标志,保留N、Z、V标志。
MRS R0,CPSR ;将CPSR中的内容传送⾄R0ORR R0,R0,#&1f ;置位R0的第29位MSR CPSR_c,R0 ;再将R0中的内容传送⾄CPSR例⼦:设置cpu⼯作在超级保护模式(SVC32)@set the cpu to SVC32 modemrs r0,cpsr@把CPSR内容存⼊r0.使⽤了mrs指令:专⽤寄存器到通过寄存器的存取.@CPSR当前程序状态寄存器格式如下:@ 31 30 29 28 27 26 25 24 ~ ~ ~ 8 7 6 5 4 3 2 1 0@ ___ ___ ___ ___ ___ ___ ___ ___ _ _ _ _ ___ ___ ___ ____ ____ ____ ____ ____@| N | Z | C | V | * | * | * | * | * * * | I | F | T | M4 | M3 | M2 | M1 | M0 |@bic r0,r0,#0x1f@bic指令(bit clear): r0:= r0 and (not op2).上边的指令⽬的是把bit0~bit4清零.orr r0,r0,#0xd3@r0:= r0 or 0xd3 . 以上三条指令执⾏后r0值为:**** **** **** **** **** ***** 11*1 0011msr cpsr,r0@把r0存于cpsr.注意:msr指令是专⽤的通⽤寄存器到特殊功能寄存器的指令与mrs对应说明:通过上边的指令可以看到,实现了两个功能.1,disable 外部中断(IRQ)与快速中断(FIR).2,把系统设为SVC32状态(超级保护)即M4~M1=10011。
嵌入式系统实验报告-1-外部中断

《嵌入式系统技术》实训报告1、实验目的z了解S3C2440A 外部中断的工作原理。
z掌握S3C2440A 外部中断的使用方法。
2、实验设备z PC 机、Multi-ICE 仿真器、2440A 实验箱。
3、实验内容z通过外部K1、K2、K3、K4、K5、K7 按键触发外部中断E INT1、EINT2、EINT3、EINT4、EINT5、EINT74、实验原理4.1 ARM 的异常中断类型在嵌入式系统中外部设备的功能实现主要是靠中断机制来实现的。
中断功能可以解决CPU 内部运行速度远远快于外部总线速度而产生的等待延时问题。
ARM 提供的FIQ 和IRQ 异常中断用于外部设备向C PU 请求中断服务,一般情况下都是采用I RQ 中断。
七种异常中断中断过程框图4.2 异常中断响应过程和返回过程异常中断的响应过程:1).保存处理器当前状态寄存器C PSR 的值到备份程序状态寄存器S PSR 中。
2).设置但前程序状态寄存器CPSR 的值,其中包括:设置CPSR 响应位的值,使处理器进入特定的处理器模式;按要求屏蔽中断,通常应该屏蔽I RQ 中断。
在F IQ 中断时屏蔽F IQ 中断。
3).设置L r 寄存器。
将相应中断模式的L r 寄存器的值设为异常中断的返回地址。
4).处理程序计数器PC,将PC 值设为相应的中断向量的地址,从而实现跳转以执行中断服务程序。
异常中断的返回当处理器执行完以上流程之后,处理器已经从中断向量进入异常处理的状态。
异常中断处理完毕之后,在异常中断程序的末端,处理器进入异常中断的返回状态,其流程如下:1).恢复状态寄存器。
将保存的备份程序状态寄存器SPSR 值赋给当前程序状态寄存器CPSR。
2).将返回地址赋值到程序计数器(PC)。
这样程序将返回到异常中断产生的下一条指令或出现问题的指令处执行。
需要注意的是:对于不同的异常中断,其返回地址的计算方法也是不同的,IRQ 和F IQ 异常中断产生时,程序计数器PC 已经更新,而SWI 中断和未定义指令中断时由当前指令自身产生的,程序计数器P C 尚未更新,所以要计算出下一条指令的地址来执行返回操作;指令预取指中指异常中断和数据访问中断要求,返回到出现异常的执行现场,重新执行操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、ARM中断有两种类型FIQ和IRQ
FIQ---快速中断
IRQ---一般中断
我们是可以将一个中断源设置为FIQ也可以设置成IRQ,一般我们都是使用IRQ,在嵌入式linux是不支持FIQ。中断源默认的也是IRQ。
2、IRQ总的开关
通过CPSR中的I位控制IRQ的开关。
一般我们只能将一个中断源设置成FIQ,这个中断源是最紧急需要处理的。
EXT_INT_0_MASK
EXT_INT_1_MASK
EXT_INT_2_MASK
EXT_INT_3_MASK
5、中断判断及清除寄存器
EXT_INT_0_PEND
EXT_INT_1_PEND
EXT_INT_2_PEND
EXT_INT_3_PEND
五、中断控制器的寄存器
1、中断状态寄存器
可以通过该寄存器知道中断是否发生。
VIC0VECTADDR16=(unsigned int )eint16_31_isr;
2、当EINT16有效,则开始响应EINT16,这时硬件会自动将VIC0VECTADDR16的内容copy到VIC0ADDRESS寄存器中。
3、在将VIC0ADDRESS的值给PC,这样就跳到eint16_31_isr()处理该中断。
}
七、分析中断的响应过程
八、总结
九、作业
1、KEY2~KEY5四个按键控制D1~D4的翻转,采用中断方式做。
{
if(EXT_INT_2_PEND & (1<<0))//EINT16
{
GPJ2DAT ^= (1<<0);//toggle
// clear pending bit
EXT_INT_2_PEND = 1<<0;
// clear VIC0ADDRESS
intc_clearvectaddr();
}
#if 0
2、中断类型选择寄存器
3、中断开关寄存器
4、中断向量地址寄存器
分析:
1、VIC0VECTADDR0~VIC0VECTADDR31是VIC0的32个中断源的向量地址寄存器,该寄存器中存放的是对应中断源ISR的入口地址。在中断初始化的时候,需要对该寄存器赋值。
例如:EINT16的中断处理程序void eint16_31_isr(void),则初始化过程如下:
if(EXT_INT_2_PEND & (1<<1))//EINT17
{
GPJ2DAT ^= (1<<1);//toggle
// clear pending bit
EXT_INT_2_PEND = 1<<1;
// clear VIC0ADDRESS
intc_clearvectaddr();
}
#endif
intc_setvectaddr(NUM_EINT16_31, isr_key);
//unmasked EINT16
EXT_INT_2_MASK &= ~(1<<0);
//enable EINT16_31
intc_enable(NUM_EINT16_31);
while (1);
}
2、中断处理程序
void isr_key(void)
// GPH2_0 --> EXT_INT[16]
GPH2CON |= 0xF;
//EXT_INT[16]: Falling edge triggered
EXT_INT_2_CON &= ~(7<0);
EXT_INT_2_CON |= (2<<0);
//initialize vector interrupt address with num of init and isr.
六、实验程序
EINT16(key2)控制D1等翻转1、主ຫໍສະໝຸດ 序int main(void)
{
//GPJ2CON[3:0] = 0001;GPJ2_0--->output
GPJ2CON &= ~(0xf<<0);
GPJ2CON |= (1<<0);
//interrupt controller init
int_init();
二、s5p210的中断源
1、有四个中断控制VIC0~VIC3
三、GEC210平台的原理图
四、外部中断的初始化设置
如果将一个GPIO设置成EINT,并且设置该EINT的触发方式。
1、设置GPIO为EINT功能
2、设置EINT的触发方式
我们可以将外部中断设置为下降沿触发。
3、EINT自带滤波器设置
4、EINT中断开关(屏蔽)寄存器