ADCP(RTI)命令大全
300K宽带ADCP设置命令

ED00010 换能器深度(cm),根据实际自己设置, WINRIVER 软件里面也可在软件里直接填
ES35 盐度(ppm),根据实际设置,接近即可
CF01111 流控制 CFmnopq m=1 自动开始下一组数据采集(循环),只有<break>才能停止 m=0 一组数据后即停止,需要人工输入命令才能开始下一组或执行其他命令 n=1 准备就绪后自动开始发生 n=0 人工干预来发射 o=1 允许二进制数据输出 o=0 允许十六进制数据输出 p=1 允许串口输出(是 o 的前提) q=1 记录到数据存储卡
WS200 每层的厚度(cm),设置范围是 0 ~3200 cm(当前设置是 2 米);注意:要根据测 量需要和环境来设定, 300K 的设置不要小于 1 米
WF176 盲区设置(cm)(当前设置是 1.76 米) 300K 的默认设置是 WF176,建议 300K 的 设置一般不小于 1 米,层厚越大,设置越大
无 无 s 盐度 人为输入命令 ES 无 无 无 t 温度 人为输入命令 ET 用内部传感器 无 无 * h=3 仅对 DVL 适用
EX111111 数据的坐标系统,默认设置为 EX111111 EXxxptb xx = 坐标转换 00 无坐标系统转换 采用波束坐标系统,不采用纵摇、横摇和方向数据 01 采用相对于仪器的 XYZ 三方向的坐标系统,不采用纵摇、横摇和方向数据 10 采用船只(载体)的 XYZ 三方向的坐标系统,不采用方向数据,EA 命令被采用,EB 不被采用,当 EX 的第 3 位是 1 时,采用纵摇、横摇数据 11 采用地球坐标系统,相对于地理坐标的北向、东向和垂向,采用纵摇、横摇和方向数 据和 EA/EB 命令 p = 纵摇、横摇数据 1 采用纵摇、横摇数据 t = 三波束方案 1 采用 3 波束方案 b = 水层单元成图 1 允许水层单元成图
单片机指令大全(二)2024

单片机指令大全(二)引言概述:本文是关于单片机指令大全的第二部分。
在上一部分中,我们介绍了一些常用的单片机指令和其功能。
本文将继续介绍更多的单片机指令,包括数据传输、逻辑运算、算术运算、位操作以及状态寄存器等方面的指令。
这些指令将帮助您更好地理解和使用单片机。
1. 数据传输指令1.1. MOV指令:将一个数据从源操作数传送到目的操作数。
1.2. LDI指令:将一个立即数传送到一个寄存器。
1.3. LDS和STS指令:将数据从SRAM传送到寄存器或将寄存器的数据传送到SRAM。
1.4. IN和OUT指令:将数据从端口传送到寄存器或从寄存器传送到端口。
2. 逻辑运算指令2.1. AND、OR和XOR指令:进行逻辑与、逻辑或和逻辑异或运算。
2.2. NOT指令:对一个寄存器的数据进行逻辑非运算。
2.3. CLR指令:将一个寄存器的数据清零。
3. 算术运算指令3.1. ADD和SUB指令:对两个操作数进行加法或减法运算。
3.2. INC和DEC指令:对一个寄存器的数据进行加1或减1操作。
3.3. MUL和DIV指令:进行乘法和除法运算。
4. 位操作指令4.1. ANDI、ORI和XORI指令:对一个寄存器的数据进行与、或和异或运算。
4.2. SBI和CBI指令:设置或清除一个I/O端口的某个位。
4.3. SBIC和SBIS指令:跳转指令,根据指定的I/O端口位是否被设置或清除执行跳转操作。
5. 状态寄存器相关指令5.1. SEI和CLI指令:设置或清除全局中断。
5.2. SREG指令:用于保存和恢复状态寄存器的值。
5.3. IJMP和EIJMP指令:用于从程序中直接跳转到任意存储器位置。
总结:本文介绍了单片机指令大全的第二部分内容,包括数据传输、逻辑运算、算术运算、位操作以及状态寄存器等方面的指令。
这些指令的功能与用法将有助于您更好地理解和应用单片机。
通过熟练掌握这些指令,您将能够更加灵活地进行单片机程序的设计与开发。
ADC快捷命令

ADC快捷命令ADC, *ADCENTER(设计中心“Ctrl+2”)CH, MO *PROPERTIES(修改特性“Ctrl+1”)MA, *MATCHPROP(属性匹配)ST, *STYLE(文字样式)COL, *COLOR(设置颜色)LA, *LAYER(图层操作)LT, *LINETYPE(线形)LTS, *LTSCALE(线形比例)LW, *LWEIGHT (线宽)UN, *UNITS(图形单位)ATT, *ATTDEF(属性定义)ATE, *ATTEDIT(编辑属性)BO, *BOUNDARY(边界创建,包括创建闭合多段线和面域)AL, *ALIGN(对齐)EXIT, *QUIT(退出)EXP, *EXPORT(输出其它格式文件)IMP, *IMPORT(输入文件)OP,PR *OPTIONS(自定义CAD设置)PRINT, *PLOT(打印)PU, *PURGE(清除垃圾)R, *REDRAW(重新生成)REN, *RENAME(重命名)SN, *SNAP(捕捉栅格)DS, *DSETTINGS(设置极轴追踪)OS, *OSNAP(设置捕捉模式)PRE, *PREVIEW(打印预览)TO, *TOOLBAR(工具栏)V, *VIEW(命名视图)AA, *AREA(面积)DI, *DIST(距离)LI, *LIST(显示图形数据信息)2、绘图命令:PO, *POINT(点)L, *LINE(直线)XL, *XLINE(射线)PL, *PLINE(多段线)ML, *MLINE(多线)SPL, *SPLINE(样条曲线)POL, *POL YGON(正多边形)REC, *RECTANGLE(矩形)C, *CIRCLE(圆)A, *ARC(圆弧)DO, *DONUT(圆环)EL, *ELLIPSE(椭圆)REG, *REGION(面域)DBA, *DIMBASELINE(基线标注)DCO, *DIMCONTINUE(连续标注)D, *DIMSTYLE(标注样式)DED, *DIMEDIT(编辑标注)DOV, *DIMOVERRIDE(替换标注系统变量)(二)常用CTRL快捷键【CTRL】+1 *PROPERTIES(修改特性)【CTRL】+2 *ADCENTER(设计中心)【CTRL】+O *OPEN(打开文件)【CTRL】+N、M *NEW(新建文件)【CTRL】+P *PRINT(打印文件)【CTRL】+S *SA VE(保存文件)【CTRL】+Z *UNDO(放弃)【CTRL】+X *CUTCLIP(剪切)【CTRL】+C *COPYCLIP(复制)【CTRL】+V *PASTECLIP(粘贴)【CTRL】+B *SNAP(栅格捕捉)【CTRL】+F *OSNAP(对象捕捉)【CTRL】+G *GRID(栅格)【CTRL】+L *ORTHO(正交)【CTRL】+W *(对象追踪)【CTRL】+U *(极轴)(三)常用功能键【F1】*HELP(帮助)【F2】*(文本窗口)【F3】*OSNAP(对象捕捉)【F7】*GRIP(栅格)【F8】*ORTHO(正交)============================== F1: 获取帮助F2: 实现作图窗和文本窗口的切换F3: 控制是否实现对象自动捕捉F4: 数字化仪控制F5: 等轴测平面切换F6: 控制状态行上坐标的显示方式F7: 栅格显示模式控制F8: 正交模式控制F9: 栅格捕捉模式控制F10: 极轴模式控制F11: 对象追踪式控制Ctrl+B: 栅格捕捉模式控制(F9)Ctrl+C: 将选择的对象复制到剪切板上MT, *MTEXT(多行文本)T, *MTEXT(多行文本)B, *BLOCK(块定义)I, *INSERT(插入块)W, *WBLOCK(定义块文件)DIV, *DIVIDE(等分)H, *BHA TCH(填充)3、修改命令:CO, *COPY(复制)MI, *MIRROR(镜像)AR, *ARRAY(阵列)O, *OFFSET(偏移)RO, *ROTATE(旋转)M, *MOVE(移动)E, DEL键*ERASE(删除)X, *EXPLODE(分解)TR, *TRIM(修剪)EX, *EXTEND(延伸)S, *STRETCH(拉伸)LEN, *LENGTHEN(直线拉长)SC, *SCALE(比例缩放)BR, *BREAK(打断)CHA, *CHAMFER(倒角)F, *FILLET(倒圆角)PE, *PEDIT(多段线编辑)ED, *DDEDIT(修改文本)4、视窗缩放:P, *PAN(平移)Z+空格+空格, *实时缩放Z, *局部放大Z+P, *返回上一视图Z+E, *显示全图5、尺寸标注:DLI, *DIMLINEAR(直线标注)DAL, *DIMALIGNED(对齐标注)DRA, *DIMRADIUS(半径标注)DDI, *DIMDIAMETER(直径标注)DAN, *DIMANGULAR(角度标注)DCE, *DIMCENTER(中心标注)DOR, *DIMORDINATE(点标注)TOL, *TOLERANCE(标注形位公差)LE, *QLEADER(快速引出标注)DBA, *DIMBASELINE(基线标注)DCO, *DIMCONTINUE(连续标注)D, *DIMSTYLE(标注样式)DED, *DIMEDIT(编辑标注)DOV, *DIMOVERRIDE(替换标注系统变量) (二)常用CTRL快捷键【CTRL】+1 *PROPERTIES(修改特性) 【CTRL】+2 *ADCENTER(设计中心)【CTRL】+O *OPEN(打开文件)【CTRL】+N、M *NEW(新建文件)【CTRL】+P *PRINT(打印文件)【CTRL】+S *SA VE(保存文件)【CTRL】+Z *UNDO(放弃)【CTRL】+X *CUTCLIP(剪切)【CTRL】+C *COPYCLIP(复制)【CTRL】+V *PASTECLIP(粘贴)【CTRL】+B *SNAP(栅格捕捉)【CTRL】+F *OSNAP(对象捕捉)【CTRL】+G *GRID(栅格)【CTRL】+L *ORTHO(正交)【CTRL】+W *(对象追踪)【CTRL】+U *(极轴)(三)常用功能键【F1】*HELP(帮助)【F2】*(文本窗口)【F3】*OSNAP(对象捕捉)【F7】*GRIP(栅格)【F8】*ORTHO(正交)==============================F1: 获取帮助F2: 实现作图窗和文本窗口的切换F3: 控制是否实现对象自动捕捉F4: 数字化仪控制F5: 等轴测平面切换F6: 控制状态行上坐标的显示方式F7: 栅格显示模式控制F8: 正交模式控制F9: 栅格捕捉模式控制F10: 极轴模式控制F11: 对象追踪式控制Ctrl+B: 栅格捕捉模式控制(F9)Ctrl+C: 将选择的对象复制到剪切板上Ctrl+F: 控制是否实现对象自动捕捉(f3) Ctrl+G: 栅格显示模式控制(F7)Ctrl+J: 重复执行上一步命令Ctrl+K: 超级链接Ctrl+N: 新建图形文件Ctrl+M: 打开选项对话框AA: 测量区域和周长(area)AL: 对齐(align)AR: 阵列(array)AP: 加载*lsp程系A V: 打开视图对话框(dsviewer)SE: 打开对相自动捕捉对话框ST: 打开字体设置对话框(style)SO: 绘制二围面( 2d solid)SP: 拼音的校核(spell)SC: 缩放比例(scale)SN: 栅格捕捉模式设置(snap)DT: 文本的设置(dtext)DI: 测量两点间的距离OI:插入外部对相Ctrl+1: 打开特性对话框Ctrl+2: 打开图象资源管理器Ctrl+6: 打开图象数据原子Ctrl+O: 打开图象文件Ctrl+P: 打开打印对说框Ctrl+S: 保存文件Ctrl+U: 极轴模式控制(F10) Ctrl+v: 粘贴剪贴板上的内容Ctrl+W: 对象追踪式控制(F11) Ctrl+X: 剪切所选择的内容Ctrl+Y: 重做Ctrl+Z: 取消前一步的操作A: 绘圆弧B: 定义块C: 画圆D: 尺寸资源管理器E: 删除F: 倒圆角G: 对相组合H: 填充I: 插入S: 拉伸T: 文本输入W: 定义块并保存到硬盘中L: 直线M: 移动X: 炸开V: 设置当前坐标U: 恢复上一次操做O: 偏移P: 移动Z: 缩放布尔求差Su布尔求和Uni布尔求交In====================3a---使用物成3d阵列3do---旋转空间视角3f---创建3f面3p---指定多线段的起点a---圆弧aa---计算机面积和周长al---对齐ar---阵列att---属性定义ate---块属性b---定义块bh---定义图案填充bo---创建边界br---打断c---圆ch---修改物体特性cha---倒直角col---颜色co---复制d---标注设置dal---标注dan---角度标注dba---圆弧标注dce---圆心标记dco---连续标注ddi---测量圆和圆弧直径do---同心圆环dov---修改标注变量dra---标注半径div---等分di---测量dt---输入文本dv---相机调整e---删除ed---修改文本el---椭圆ex---延伸exit---退出exp---输出数据ext---拉伸f---倒圆角fi---选择过滤器g---对象编组gr---选项h---填充he---关联填充i---插入图元imp---输入文件io---插入文档程序l---线la---图层编辑le---文字注释len---修改对象长度等数值li---对象特性显示lo---布局选项ls---命令历史纪录ltc---线型设置lwc---线宽设置lts---新线形比例因子mc---移动me---等分ml---多样线mt---文本os---捕捉设置o---偏移op---选项orbit---旋转p---平移pl---连续线po---点pol---多边形pr---选项pre---页视图面print---打印pu---清理pe---修改多段线rea---重画ren---重命名rec---矩形rev---旋转成三维面ro---旋转物体s---拉伸scl---缩放scr---脚本文件sec---切实体sha---着色sl---切面sn---指定捕捉间距sp---拼写检查spl---样条曲线si---文字样式to---自定义工具栏tor---三维圆环tr---修剪uc---用户声标v---视图vp---视点设置w---编写块x---分解xa---样参照文件xb---外部参照锁定xc---剪裁xl---参考线xr---外部参照管理z---缩放--------------------作者:zxtina(ait+o+..格式,我省略写了,请看清再用):ait+o+c--颜色(以下省ait+o)+n--线型+l--图层+w--线宽+s--文字样式+d--表注样式+y--打印样式+p--点样式+m--多线样式+v--单位样式+t--厚度+a--圆形界线+r--重命名绘图用(直接命令):ot--单行文字t --多行文字b --创建块(重)i --插入块(重)a --弧线mi--镜像m --移动(关于这个命令还是试试吧)sc--比例len--拉伸(重)f1~f11的作用:f1---帮助f2---文本窗口f3---对象捕捉f4---(忘了)f5---等轴测平面f6---坐标f7---栅格f8---正交f9---捕捉f10--极轴追踪f11--对象追踪。
adc指令——精选推荐

adc指令adc是带进位加法指令,它利⽤了CF位上记录的进位值。
指令格式: adc 操作对象1,操作对象2功能:操作对象1 = 操作对象1 + 操作对象2 + CF例如指令 adc ax,bx实现的功能是: (ax)=(ax)+(bx)+CF例如:mov ax,2mov bx,1sub bx,axadc ax,1执⾏后,(ax)=4。
adc执⾏时,相当于计算: (ax)+1+CF = 2+1+1 = 4。
mov ax,1add ax,axadc ax,3执⾏后,(ax)=5。
adc执⾏时,相当于计算: (ax)+3+CF=2+3+0=5。
mov al,98Hadd al,aladc al,3执⾏后,(al)=34H。
adc执⾏时,相当于计算: (al)+3+CF=30H+3+1=34H。
adc指令的意义:加法可以分两步来进⾏:1)低位相加;2)⾼位相加再加上地位相加产⽣的进位值下⾯的指令和add ax,bx具有相同的结果:add al,bladc ah,bh所以CPU提供adc指令的⽬的,就是来进⾏加法的第⼆步运算的。
adc指令和add指令相配合就可以对更⼤的数据进⾏加法运算。
编程计算1EF000H+201000H,结果放在ax(⾼16位)和bx(低16位)中。
mov ax, 001EHmov bx,0F000Hadd bx,1000Hadc ax,0020H编程计算1EF0001000H + 2010001EF0H,结果放在ax(最⾼16位),bx(次⾼16位),cx(低16位)中。
mov ax, 001EHmov bx, 0F000Hmov cx, 1000Hadd cx, 1EF0Hadc bx, 1000Hadc ax, 0020H编写⼦程序,对两个128位数据进⾏相加名称:add128功能:两个128位数据进⾏相加参数:ds:si指向存储第⼀个数的内存空间,因数据为128,所以需要8个字单元,由低地址单元到⾼地址单元依次存放128位数据由低到到⾼的每个字。
山石网科 ADC命令行手册说明书
Version3.0.1Copyright2022Hillstone Networks.All rights reserved.Information in this document is subject to change without notice.The software described in this document is furnished under a license agreement or nondisclosure agreement.The software may be used or copied only in accordance with the terms of those agreements.No part of this publication may be reproduced,stored in a retrieval system,or transmitted in any form or any means electronic or mechanical,including photocopying and recording for any purpose other than the pur-chaser's personal use without the written permission of Hillstone Networks.Hillstone Networks本文档禁止用于任何商业用途。
联系信息北京苏州地址:北京市海淀区宝盛南路1号院20号楼5层地址:苏州高新区科技城景润路181号邮编:100192邮编:215000联系我们:/about/contact_Hillstone.html关于本手册本手册介绍山石网科的应用交付系统ADC的使用方法。
获得更多的文档资料,请访问:https://针对本文档的反馈,请发送邮件到:*************************山石网科https://TWNO:TW-CUG-ADC-3.0.1-CN-V1.0-7/26/2022目录目录1第1章服务器负载均衡1 SLB相关概念2负载均衡算法2配置虚拟服务器4配置虚拟服务器部署模式7配置虚拟服务器IP和端口8配置流量组9配置域名匹配10启用默认虚拟服务器11配置自动源NAT11配置虚拟服务器IP地址是否允许被PING12配置数据库账号12开启/关闭事务保持功能13配置最大连接数13配置虚拟服务器的状态13指定缺省服务池14指定备份服务池14指定写服务池14指定读服务池15指定设备与客户端的交互方式15指定支持的客户端认证方式15指定服务器名称16指定虚拟服务器支持的功能16查看虚拟服务器的运行状态17配置最大连接数17配置连接失败动作18配置连接速率限制18配置防浪涌等待队列19配置超时连接动作19开启历史信息记录20记录日志20 TOA类型21插入TOA21绑定SSL模板21绑定服务端SSL模板22绑定应用模板22绑定TCP模板22配置DNS服务器23配置IPv6的DNS查询23配置DNS有效时间23开启HTTP隧道模式24配置自动修改HTTP头部协议24指定脚本文件24指定四层内容交换规则25移动规则25指定七层内容交换规则26移动规则26指定内容改写规则27移动规则27指定SQL内容交换规则27移动规则28指定Web防护模板28配置主机改写28配置访问控制29移动规则30配置错误信息30导入页面30删除页面31查看页面31配置三角模式31配置UDP强制负载32配置UDP超时时间32逆向路由32配置调度模式33镜像请求33配置入接口模式34配置虚拟服务器IP的路由发布35配置虚拟服务器外链改写36配置基于路径方式的外链改写36配置虚拟服务器外链探测38配置基于域名方式的外链改写38配置虚拟服务器的探测服务器功能40查看虚拟服务器信息40配置真实服务40创建真实服务41指定IP和端口41指定域名和端口42自动解析域名所有IP43配置最大连接数43配置连接速率限制43指定恢复时间44指定预热时间44配置真实服务的权重44配置真实服务的状态45绑定健康检查对象45开启历史信息记录46查看真实服务配置46查看真实服务的运行状态46配置服务池47创建服务池47添加真实服务47指定真实服务恢复时间47指定真实服务预热时间48配置真实服务优先级调度功能48配置会话保持方法49基于Cookie的会话保持方法49基于Cookie哈希的会话保持方法50基于URL哈希的会话保持方法51基于首部的会话保持方法52基于插入Cookie的会话保持方法52基于改写Cookie的会话保持方法54基于HTTP版本的会话保持方法55基于请求方法的会话保持方法55基于目的IP的会话保持方法56基于源IP的会话保持方法57基于源IP与目的IP的会话保持方法58基于TOA的会话保持方法58基于TOA或源IP(TOA优先)的会话保持方法59基于真实源IP的会话保持方法60基于URL的会话保持方法61基于SSL ID的会话保持方法62基于SNI的会话保持方法62基于Call ID的会话保持方法63基于RDP的会话保持方法64基于RADIUS属性的会话保持方法65查看会话保持表67清空会话保持表68配置负载均衡算法69绑定健康检查对象73开启/关闭手动恢复功能73手动恢复运行状态73查看服务池配置74查看服务池的运行状态74服务池中真实服务的运行状态75配置SLB规则75配置四层内容交换规则76配置客户端源IP76配置客户端源端口76配置客户端目的IP77配置客户端目的端口77配置四层内容交换支持的协议77配置服务池78配置描述信息78查看四层内容交换规则78配置HTTP内容改写规则78配置文本编码方式79配置匹配操作符80配置匹配条件80配置匹配条件区分大小写83配置内容改写规则动作83配置动作为重定向83原有路径查询84配置动作为消息体改写84配置动作为头部改写85配置动作为Cookie改写85配置动作为URL改写86配置动作为删除Cookie86配置动作为删除头部87配置动作为插入头部87配置动作为插入Cookie87配置动作为添加IP协议类型标识88配置动作为插入源IP89配置动作为插入真实源IP89配置描述信息90查看内容改写规则信息90 HTTP内容改写_变量使用说明90配置HTTP内容交换规则94配置描述信息94配置文本编码方式94配置匹配操作符95配置服务池95配置匹配条件95配置匹配条件区分大小写98查看HTTP内容交换规则99 SQL内容交换规则99配置匹配条件99配置服务池/真实服务器100配置失败动作100配置描述信息100查看SQL内容交换规则101配置访问控制规则101配置描述信息101配置文本编码方式102配置匹配操作符102配置匹配条件102配置匹配条件区分大小写105配置访问控制动作105配置时间表106查看访问控制规则106查看SLB规则状态107配置客户端SSL模板107创建SSL模板107配置握手超时时间108配置加密套件108启用服务器加密套件优先108调整加密套件顺序109配置SSL版本109配置证书链109配置基于SSL会话ID的会话复用功能110配置基于SSL会话票据的会话复用功能110配置0RTT功能110配置国密加密套件111调整国密加密套件顺序111配置国密签名证书链112配置国密加密证书链112SSL客户端验证112指定对客户端验证的方式112指定需验证的CA证书113自动CA证书通告113指定需通告的CA证书113配置验证证书最小密钥长度114配置客户端验证的证书最大深度114配置客户端验证规则114配置URL验证匹配规则115配置客户端证书的OCSP验证116清除OCSP缓存118配置OCSP Stapling118查看SSL模板配置119配置服务端SSL模板120创建服务端SSL模板120配置握手超时时间120启用SNI功能121配置加密套件121调整加密套件顺序121配置SSL版本122配置证书链122配置国密加密套件122调整国密加密套件顺序123配置国密签名证书链124配置国密加密证书链124查看SSL模板配置124 SSL加速卡124 SSL加速卡相关命令125查看加速卡统计数据125清除加速卡统计数据126测试加速卡功能126查看加速卡的驱动版本号127查看加速卡以及国密卡状态128切换SSL加速模式129配置应用模板129创建应用模板129 HTTP2.0协议130开启HTTP2.0130配置空闲连接超时时间130配置最大并发流131配置接收窗口大小131配置数据帧大小131配置标题表大小131插入标题X-HTTP2131配置网页优化132配置网页的HTML优化132配置网页的图片优化133开启WebSocket135配置保活超时时间135配置连接超时时间135配置查询时间136配置MYSQL保活超时时间136配置读写超时时间136配置连接复用137配置读取超时时间137配置发送超时时间138开启X-Forward-For138开启X-Real-IP138配置缓冲区大小138配置首片缓冲区大小139配置最大请求体大小139配置最大请求头大小139启用/禁用代理缓冲功能139 HTTP缓存140配置HTTP静态资源的内存缓存140配置HTTP静态资源的磁盘缓存141清除HTTP缓存143查看HTTP缓存统计信息143 HTTP压缩143配置HTTP压缩144清除HTTP压缩144查看HTTP缓存信息144配置客户端缓存大小144配置代理缓存大小145配置读写超时时间145查看应用模板信息145配置Web防护模板145创建Web防护模板147配置防护动作147配置基于虚拟服务器的检测规则148配置基于源IP的检测规则148配置客户端IP获取方式148配置基于URL的检测规则149移动基于URL检测规则的位置149查看Web防护模板150 Web防护黑名单150查看或清除Web防护黑名单151 Web防护信任名单151查看或清除Web防护信任名单152配置TCP模板152创建TCP模板152配置TCP单边加速153配置客户端侧单边加速153配置真实服务侧单边加速153查看TCP模板信息153其他命令154显示或清除会话信息154显示或清除会话保持表信息155延迟删除会话信息155启用/禁用延迟删除会话信息功能156查看延迟删除会话信息功能的启用状态156 SSL透视镜模板156配置SSL透视镜模板156指定模式157配置信任域157配置匹配规则157配置解密协议157配置域名簿158配置解密SNI为空的流量158启用状态统计158开启日志开关159启用镜像解密监控159验证服务器证书159提醒信任域证书安装160信任域缓存表161查看信任域缓存表161清除信任域缓存表161白名单161添加白名单条目162删除白名单条目162查看白名单162状态统计162查看状态统计信息162清除状态统计信息163配置状态统计过期时间163健康检查163创建健康检查163 DNS健康检查165 FTP健康检查166 SNMP-DCA健康检查168 SNMP-DCA-BASE健康检查170 HTTP/HTTPS健康检查173ICMP健康检查175 IMAP健康检查176 POP3健康检查178 SMTP健康检查179 TCP健康检查181 TCP-ECHO健康检查182 TCP-HALF-OPEN健康检查184 UDP健康检查185 Third-Party健康检查187 RADIUS-AUTHENTICATION健康检查188 RADIUS-ACCOUNTING健康检查189 WEBSOCKET健康检查191 WEBSOCKET-SSL健康检查193 SIP-TCP健康检查194 SIP-UDP健康检查196 PASSIVE-HTTP健康检查197 PASSIVE-TCP健康检查198 MYSQL健康检查199健康检查组201配置健康检查组操作符201配置健康检查组成员202第2章全局负载均衡203DNS服务器203实现流程203 DNS Server的部署场景204配置DNS服务器205配置DNS视图206创建DNS视图206启用DNS视图206配置源IP206配置目的IP207关联区域208关联智能DNS208递归查询208转发配置208配置转发目的地址208强制RD标志209配置默认DNS视图209关联智能DNS209关联区域210递归查询210转发配置210启用强制RD标志211清除DNS缓存211配置区域211创建区域212配置SOA资源212配置资源记录213配置A记录213配置AAAA记录214配置NS记录214配置CNAME记录215配置PTR记录215配置MX记录216配置TXT记录216配置SRV记录217启用资源记录217关联智能DNS217转发配置218转发目的地址218配置全局配置218配置DNS服务器监听地址218配置监听端口219发布监听地址路由219配置UDP会话超时220配置缓存220开启GSLB统计220开启GSLB日志220智能DNS220负载均衡算法221配置智能DNS221配置ISP222添加IP网段222配置地区222配置国家信息223配置省份信息223配置IP网段223配置ISP223配置服务器和服务器池224创建服务器224服务器状态224服务器IP224服务器权重224指定健康检查225指定健康检查端口225引用地区225绑定接口226服务器优先级226启用服务器可用性验证226绑定数据中心227创建服务器池227服务器池状态227指定首选算法227指定备选算法228服务器池所属地区229服务器池权重229指定健康检查229指定健康检查端口229启用链路繁忙保护230配置服务器池成员230服务器成员运行状态230配置Smart DNS主机231 DNS主机状态231配置域名231配置TTL231配置算法232配置保持算法232配置服务器池成员232配置默认服务器池233数据中心233应用场景举例234配置数据中心234创建本地数据中心235指定IP地址235指定联系人235指定地理位置236启用虚拟服务器发现236指定本地IP地址236指定本地设备236发现数据中心237查看数据中心237配置GSLB同步组238添加GSLB同步组成员238配置同步238查看GSLB同步组238注册SLB设备到数据中心238配置本地设备239手动发现虚拟服务器239查看本地设备239第3章链路负载均衡240出站负载均衡240创建LLB Profile240配置负载均衡算法241配置带宽统计周期244开启综合考虑其它调度结果功能245配置链路负载均衡的优先级调度策略245配置链路探测246开启链路探测246配置链路探测掩码/前缀246配置带宽利用率阈值246配置计算链路状态时各项权值247配置链路权重刷新时间247配置子网条目最大值247配置带宽探测方向247配置负载均衡的模式248配置会话保持方法248配置会话保持超时时间249配置链路繁忙保护249配置日志记录250添加描述信息250绑定LLB Profile250查看会话保持表251查看链路负载均衡信息251第4章设备集群252集群基础概念252设备发现与认证252设备组252流量组252集群同步253配置集群253配置本地管理地址254设备发现与认证254配置本地设备254配置证书链254配置设备IP254配置主故障转移IP255配置次故障转移IP255配置主镜像IP255配置设备联系方式255配置设备地理位置256配置设备发现超时时间256配置设备在线超时时间256添加设备描述信息256发现设备257集群同步257配置设备组258配置同步范围258添加设备259配置心跳时间间隔259配置心跳阈值259配置流量组260配置故障转移顺序260配置负载系数261指定监测对象261启用抢占功能262配置抢占时间262启用数据对象同步262配置虚拟MAC262配置虚拟MAC前缀263配置非对称流量转发263启用非对称流量转发功能263查看集群配置264第5章网络连接265安全域265配置安全域266显示域信息266创建安全域266指定描述信息267绑定二层域到VSwitch267绑定三层域到VRouter267配置安全域WAN属性268接口268查看接口信息269配置接口270绑定接口到域272配置接口描述信息272配置接口IP地址272配置接口IP地址的Local属性273配置接口IP地址所属流量组273配置接口浮动IP274配置接口二级IP地址274配置接口二级管理IP地址274配置接口所属ISP275配置接口的链路负载均衡优先级275配置接口的链路负载均衡权值275配置接口带宽276配置接口最大传输单元(MTU)276强制关闭接口276设置接口ARP超时时间277配置接口管理功能277配置FTP服务功能278关闭记录接口IP地址冲突日志功能(DAD模式ARP报文触发)278配置接口代理ARP功能279配置基于策略的接口镜像过滤功能279配置mirror Profile280指定流量镜像目的接口280指定流量镜像目的地址281指定策略规则引用mirror Profile281显示mirror Profile信息281配置接口逆向路由功能282配置接口备份功能282配置接口保持时间283配置接口保活功能284配置接口联动功能284配置接口Local属性285配置接口WAN属性285回环接口285创建回环接口285以太网接口286创建以太网子接口286进入以太网接口配置模式286配置以太网接口的速率286配置以太网接口的工作方式287克隆MAC地址287配置Combo口288 VSwitch接口288创建VSwitch接口288集聚接口289创建集聚接口以及集聚子接口289添加接口到集聚接口289指定报文发送均衡方式290冗余接口290创建冗余接口以及冗余子接口290添加接口到冗余接口291指定主接口291开启或关闭ARP回环告警日志291隧道接口292创建隧道接口292绑定隧道292多隧道OSPF支持293配置借用IP地址功能(IP Unnumbered)293查看隧道接口信息293 PPPoE子接口294链路聚合294LACP动态协商聚合294聚合组成员接口状态294配置LACP动态协商聚合295启用/禁用LACP协议295指定LACP系统优先级296指定接口LACP优先级296指定LACP超时时间296指定最大活动链路数297指定最小活动链路数297指定报文发送均衡方式297查看聚合组信息298 LLDP298 LLDP工作模式298配置LLDP功能299开启/关闭全局LLDP功能299开启/关闭接口的LLDP功能300配置接口的LLDP工作模式300配置接口初始化延迟时间300配置LLDP报文发送间隔301配置LLDP报文发送延迟时间301配置TTL乘数301显示LLDP本地信息302显示接口的LLDP邻居信息302显示LLDP统计信息302显示LLDP报文收发信息302显示LLDP状态信息302 DNS303配置DNS名字服务303设置域名303设置DNS域名服务器304配置DNS代理功能304配置DNS代理规则305创建DNS代理规则305配置DNS代理过滤条件305指定DNS入接口305指定DNS源地址306指定DNS目的地址306指定DNS域名307配置DNS代理规则动作307配置DNS代理服务器307配置DNS服务器308开启/关闭DNS64功能308配置DNS64服务器309配置DNS64前缀309配置描述信息309启用/禁用DNS代理规则310修改DNS代理规则的排列顺序310配置DNS代理服务器探测功能310开启/关闭DNS代理的UDP报文校验和功能311指定DNS代理响应报文的TTL311查看DNS代理规则信息311解析311设置DNS请求的响应超时时间312设置DNS请求重试次数312指定链路权值312指定DNS解析动态缓存的TTL313开启DNS解析日志功能313缓存314添加静态DNS映射条目314查看DNS映射条目314清除动态DNS映射条目315 DNS Snooping315指定域名解析方式316指定精确域名最大映射IP数316指定转发响应报文延时时间316指定最大通配符域名数317指定DNS Snooping映射缓存TTL317查看DNS Snooping配置信息318查看DNS Snooping域名及IP映射信息318开启/关闭DNS功能318开启DNS解析日志功能318显示DNS配置信息318 DHCP319配置DHCP客户端功能319配置DHCP方式获取IP地址319释放和重新获取IP地址320配置路由优先级(管理距离)和路由权值320配置DHCP服务器功能320 DHCP地址池基本配置321 IP地址配置321保留地址池配置322网关配置322网络掩码配置322 DHCP租约配置322配置自动配置功能323为DHCP客户端配置DNS、WINS服务器和域名323为DHCP客户端配置SMTP、POP3和新闻服务器324配置中继代理IP地址324IP-MAC地址绑定324绑定地址池到接口325配置DHCP选项325配置Option49325配置Option60325验证客户端Option60字段携带的VCI326设置DCHP服务器Option60字段携带的VCI326配置Option138326查看DHCP配置信息327配置DHCP中继代理功能327指定DHCP服务器的IP地址327开启接口的DHCP中继代理功能327 DDNS328配置DDNS功能328配置DDNS服务名称328指定DDNS服务器类型329指定DDNS服务器名称和端口号329指定最小更新间隔330指定最大更新间隔330指定DDNS用户330绑定DDNS服务名称到接口330显示DDNS信息331PPPoE331配置PPPoE331配置PPPoE实例332指定访问集中器332指定验证方式332配置PPPoE连接方式333指定网络掩码333指定路由距离和权值333指定服务334指定静态IP334指定PPPoE用户信息334配置时间表功能334指定PPPoE服务器MAC地址335配置连接状态检测335配置接口使用PPPoE方式获得IP地址336绑定PPPoE实例到接口336手动连接或者断开PPPoE连接336显示PPPoE配置信息337虚拟交换机337 VSwitch中的转发规则337查看MAC表信息338配置VSwitch339透明模式下的VLAN透传339透明模式下的ARP功能340配置NAT340创建SNAT规则341启用/禁用SNAT规则343修改SNAT规则排列顺序343开启/关闭扩展PAT端口池功能344删除SNAT规则344修改/删除SNAT描述信息344显示SNAT配置信息345查看监测失败的SNAT转换地址345创建DNAT规则346启用/禁用DNAT规则348修改DNAT规则排列顺序348修改/删除DNAT描述信息348删除DNAT规则349显示DNAT配置信息349 DNS Rewrite350透明NAT350 Full-cone NAT351显示Full-cone NAT配置信息352 IP包数据处理选项352配置MSS值352 TCP序列号检查353 TCP三次握手超时时间检查353 TCP连接终止老化时间配置353 TCP SYN包检查354丢弃SYN包355 IP分片包处理355逆向路由356应用层网关(ALG)356配置ALG功能356指定SIP代理模式358查看ALG SIP信息358第6章路由360开启/关闭静态路由查询360开启/关闭会话重匹配路由361目的路由362添加IPv4目的路由条目362添加IPv6目的路由条目363查看IPv4/IPv6目的路由信息364目的接口路由364添加IPv4目的接口路由条目364添加IPv6目的接口路由条目365查看IPv4/IPv6目的接口路由信息366查看IPv6目的接口路由的FIB信息366源路由367添加IPv4源路由条目367添加IPv6源路由条目368查看IPv4/IPv6源路由条目信息368源接口路由369添加IPv4源接口路由条目369添加IPv6源接口路由条目370查看IPv4/IPv6源接口路由条目信息371 IPv4ISP路由371配置IPv4ISP信息371添加IPv4子网条目372添加IPv4ISP信息条目372配置IPv4ISP路由372查看IPv4ISP路由配置信息373上传IPv4ISP配置文件374删除已上传的预定义IPv4ISP配置文件375 IPv6ISP路由375配置IPv6ISP信息376添加IPv6子网条目376添加IPv6ISP信息条目376配置IPv6ISP路由377查看IPv6ISP信息378上传IPv6ISP配置文件378删除已上传的预定义IPv6ISP配置文件379策略路由379创建PBR策略379创建PBR规则379编辑PBR策略规则381启用/禁用PBR策略规则383修改规则排列顺序383配置目的路由优先查找384应用PBR策略384配置PBR策略全局匹配顺序384显示PBR策略全局匹配顺序385策略路由规则支持配置TTL385查看PBR策略规则信息385动态路由385 RIP386基本配置386指定版本号386指定缺省度量386指定缺省距离387配置缺省信息发布387配置定时器387引入路由388配置被动接口388配置邻居389配置网络389配置距离389 RIP数据库390配置接口的RIP功能390配置RIP报文认证390配置发送和接收的RIP版本号390配置水平分割391显示系统RIP信息391 OSPF391 OSPF协议配置392配置Router ID393配置接口的网络类型394配置区域的路由聚合394配置区域的缺省花费395配置区域的虚拟链路395配置stub区域396配置NSSA区域397配置OSPF的引用带宽397指定缺省度量397配置缺省信息发布398指定缺省距离398配置OSPF定时器398指定运行OSPF协议的接口网络399引入路由399配置路由映射表400匹配多条路由匹配规则402修改引入路由属性403配置路由访问控制列表403配置距离405配置被动接口405配置接口OSPF功能405配置接口的OSPF认证406指定接口的链路花费406配置接口定时器406指定接口路由器优先级407配置接口的网络类型408显示OSPF信息408 OSPFv3410配置Router ID411配置区域的虚拟链路412指定缺省度量412配置缺省管理距离412配置缺省路由发布413指定接口区域及实例413配置引入路由414配置被动接口414配置OSPFv3接口定时器415指定接口路由器优先级415配置接口的链路花费416配置接口MTU匹配检查416关闭/开启OSPFv3协议417查看OSPFv3信息417 IS-IS418 IS-IS基本配置420指定路由器类型420使能接口IS-IS420配置接口IS-IS类型421配置网络类型为点对点类型421 IS-IS路由信息配置421配置NET地址421配置管理距离421配置度量类型422配置接口度量值422引入路由423发布缺省路由423 IS-IS网络优化423配置Hello报文发送时间间隔423配置Hello报文失效乘数424配置Hello报文填充功能424配置DIS选举优先级424配置被动接口425配置LSP生成时间间隔425配置LSP最大生存时间425配置LSP刷新时间425配置SPF计算时间间隔426配置过载标志位426配置主机名映射426 IS-IS网络安全性427配置认证427配置接口认证模式427查看IS-IS信息428 BGP429 BGP协议配置430进入BGP配置模式431指定Router ID431创建聚合路由432添加静态BGP路由432配置定时器432指定BGP路由管理距离433指定缺省度量433创建BGP对等体组434添加BGP对等体到对等体组434配置BGP对等体434配置BGP MD5认证435激活BGP连接435配置缺省信息发布435配置描述信息436配置BGP对等体定时器436配置下一跳为自身437配置EBGP多跳437关闭对等体或者对等体组437重置BGP连接438配置AS路径访问控制列表438开启/关闭EBGP的multipath-relax功能439配置团体属性列表439引入路由440配置路由映射表440修改引入路由属性442配置基于AS路径访问控制列表的路由过滤443配置向对等体或者对等体组发送团体属性444配置基于路由映射表的路由过滤444等价负载均衡444查看BGP信息445等价多径路由(ECMP)446配置ECMP功能446配置ECMP选路方式446静态组播路由446开启/关闭组播路由功能447配置静态组播路由447配置IPv4静态组播路由447指定入接口/出接口448配置IPv6静态组播路由448指定入接口/出接口449显示组播路由信息449显示组播FIB信息450互联网组管理协议451 IGMP Proxy451启用IGMP代理451配置接口的IGMP代理模式452查看IGMP Proxy信息452 IGMP Snooping453启用IGMP Snooping453配置IGMP Snooping453未知组播丢弃454查看IGMP Snooping信息454协议无关组播(PIM)454 PIM-SM基本原理455配置PIM-SM456 PIM-SM的基本配置456开启/关闭PIM-SM功能457配置候选RP457配置候选BSR457配置静态RP458指定关闭RPT向SPT切换458配置接口的PIM-SM功能460开启/关闭接口的PIM-SM功能460配置DR优先级460指定接口的Hello报文发送间隔461指定发送IGMP通用查询报文间隔461指定IGMP通用查询超时时间461指定IGMP通用查询最大响应时间462显示PIM-SM信息462 PIM-SSM463配置PIM-SSM463配置PIM-SSM组播组地址范围464配置IGMP报文过滤功能464 BFD465 BFD工作模式465 BFD Echo功能466配置BFD基本功能466配置BFD检测模式466配置BFD会话参数467开启/关闭Echo功能467指定接收Echo报文时间间隔468配置Echo报文的源IP地址468配置BFD多跳检测468创建BFD多跳检测模板469指定BFD控制报文的加密认证方式469配置BFD多跳会话参数470配置BFD与路由协议联动470配置BFD与静态路由联动470配置BFD与OSPF联动471配置BFD与BGP联动471显示BFD会话信息472第7章用户认证473 AAA简介473设备外部认证流程474配置AAA服务器474创建AAA服务器474配置本地服务器认证参数475配置密码控制475允许本地用户修改密码476配置密码过期时间及密码到期提醒功能476配置历史密码检查功能476配置密码复杂度476开启/关闭首次登录修改密码功能477配置角色映射规则478配置用户黑名单478配置备份认证服务器478配置防暴力破解功能479开启或关闭防暴力破解功能479配置尝试次数479配置锁定时间480。
PLC培训-西门子PLC指令大全
金蓝PLC培训,西门子PLC指令大全金蓝PLC培训,西门子PLC指令大全。
自动化编程学习起来很困难,很多人对于学习plc 编程头疼不已,下面是山东金蓝plc培训机构为大家整理的经常用到的金蓝PLC培训,西门子PLC指令大全。
1、位逻辑指令1.1 -||- 常开接点(地址)1.2 -|/|- 常闭接点(地址)1.3 XOR 位异或1.4 -|NOT|- 信号流反向1.5 -( ) 输出线圈1.6 -(#)- 中间输出1.7 -(R) 线圈复位1.8 -(S) 线圈置位1.9 RS 复位置位触发器1.10 RS 置位复位触发器1.11 -(N)- RLO下降沿检测1.12 -(P)- PLO上升沿检测1.13 -(SAVE) 将RLO存入BR存储器1.14 MEG 地址下降沿检测1.15 POS 地址上升沿检测2、比较指令2.1 CMP?I 整数比较2.2 CMP?D 双整数比较2.3 CMP?R 实数比较3、转换指令3.1 BCD_IBCD码转换为整数3.2 I_BCD 整数转换为BCD码3.3 I_DINT 整数转换为双整数3.4 BCD_DIBCD码转换为双整数3.5 DI_BCD 双整数转换为BCD码 3.6 DI_REAL 双整数转换为浮点数 3.7 INV_I 整数的二进制反码3.8 INV_DI 双整数的二进制反码3.9 NEG_I 整数的二进制补码3.10 NEG_DI 双整数的二进制补码 3.11 NEG_R 浮点数求反3.12 ROUND 舍入为双整数3.13 TRUNC 舍去小数取整为双整数 3.14 CEIL 上取整3.15 FLOOR 下取整4、计数器指令4.1 S_CUD 加减计数4.2 S_CU 加计数器4.3 S_CD 减计数器4.4 -(SC) 计数器置初值4.5 -(CU) 加计数器线圈4.6 -(CD) 减计数器线圈5、数据块指令5.1 -(OPN) 打开数据块:DB或DI6、逻辑控制指令6.1 -(JMP) 无条件跳转6.2 -(JMP) 条件跳转6.3 -(JMPN) 若非则跳转6.4 LABEL 标号7、整数算术运算指令7.1 ADD_I 整数加法7.2 SUB_I 整数减法7.3 MUL_I 整数乘法7.4 DIV_I 整数除法7.5 ADD_DI 双整数加法7.6 SUB_DI 双整数减法7.7 MUL_DI 双整数乘法7.8 DIV_DI 双整数除法7.9 MOD_DI 回送余数的双整数8、浮点算术运算指令8.1 基础指令8.1.1 ADD_R 实数加法8.1.2 SUB_R 实数减法8.1.3 MUL_R 实数乘法8.1.4 DIV_R 实数除法8.1.5 ABS 浮点数绝对值运算8.2 扩展指令8.2.1 SQR 浮点数平方8.2.2 SQRT 浮点数平方根8.2.3 EXP 浮点数指数运算8.2.4 LN 浮点数自然对数运算 8.2.5 SIN 浮点数正弦运算8.4.6 COS 浮点数余弦运算8.2.7 TAN 浮点数正切运算8.2.8 ASIN 浮点数反正弦运算8.2.9 ACOS 浮点数反余弦运算8.2.10ATAN 浮点数反正切运算9、赋值指令9.1 MOVE 赋值10、程序控制指令10.1 -(Call) 从线圈调用FC/SFC(无参数)10.2 CALL_FB 从方块调用FB 10.3 CALL_FC 从方块调用FC 10.4 CALL_SFB 从方块调用SFB 10.5 CALL_SFC 从方块调用SFC 10.6 -(MCR<> 主控继电器接通 10.7 -(MCR>) 主控继电器断开 10.8 -(MCRA) 主控继电器启动 10.9 -(MCRD) 主控继电器停止 10.10 -(RET) 返回11、移位和循环指令11.1 移位指令11.1.1 SHR_I 整数右移11.1.2 SHR_DI 双整数右移11.1.3 SHL_W 字左移11.1.4 SHR_W 字右移11.1.5 SHL_DW 双字左移11.1.6 SHR_DW 双字右移11.2 循环指令11.2.1 ROL_DW 双字左循环11.2.2 ROR_DW 双字右循环12、状态位指令12.1 OV -||- 溢出异常位12.2 OS -||- 存储溢出异常位12.3 UO -||- 无序异常位12.4 BR -||- 异常位二进制结果12.5 ==0-||- 结果位等于'0' 12.6 <>0-||- 结果位不等于'0' 12.7 >0-||- 结果位大于'0' 12.8 <> 结果位小于'0'12.9 >=0-||- 结果位大于等于'0'12.10 <=0-||->13、定时器指令13.1 S_PULSE 脉冲S5定时器13.2 S_PEXT 扩展脉冲S5定时器13.3 S_ODT 接通延时S5定时器13.4 S_ODTS 保持型接通延时S5定时器13.5 S_OFFDT 断电延时S5定时器13.6 -(SP) 脉冲定时器线圈13.7 -(SE) 扩展脉冲定时器线圈13.8 -(SD) 接通延时定时器线圈13.9 -(SS) 保持型接通延时定时器线圈13.10 -(SF) 断开延时定时器线圈14、字逻辑指令14.1 WAND_W 字和字相'与'14.2 WOR_W 字和字相'或'14.3 WAND_DW 双字和双字相'与'14.4 WOR_DW 双字和双字相'或'14.5 WXOR_W 字和字相'异或'14.6 WXOR_DW 双字和双字相'异或“泰安市泰山区金蓝职业培训学校自2006年被泰安市劳动部门批准成立以来,坚持“办精品教育,铸金色蓝领”,秉承“厚道办学”的理念。
ad域常用命令
ad域常用命令AD域(Active Directory Domain)是指在Windows操作系统中使用的一种目录服务。
它是一种分布式数据库,用于存储和管理网络中的资源和用户信息。
在AD域中,我们可以通过一些常用命令来管理和操作域控制器、用户、组等。
一、域控制器管理命令1. dcpromo:用于将服务器升级为域控制器,或者将域控制器降级为成员服务器。
2. nslookup:用于查询域控制器的IP地址和域名的解析情况。
3. netdom:用于管理域控制器的信任关系,包括建立、删除和修改信任关系。
二、用户管理命令1. dsadd user:用于创建新用户账户。
2. dsmod user:用于修改用户账户的属性,如密码、显示名称等。
3. dsquery user:用于查询用户账户的信息。
4. dsget user:用于获取用户账户的详细信息。
三、组管理命令1. dsadd group:用于创建新的安全组或分发组。
2. dsmod group:用于修改组的属性,如组的作用域、描述等。
3. dsquery group:用于查询组的信息。
4. dsget group:用于获取组的详细信息。
四、策略管理命令1. gpupdate:用于强制更新组策略。
2. gpresult:用于查看当前用户或计算机应用的组策略信息。
五、其他常用命令1. net user:用于管理本地用户账户,如创建、删除和修改本地用户。
2. net group:用于管理本地组,如创建、删除和修改本地组。
3. net share:用于管理共享文件夹,如创建、删除和修改共享。
需要注意的是,使用这些AD域常用命令时,需要具有足够的权限和管理员身份。
此外,为了确保命令的执行效果,应该在操作之前先做好相应的备份工作,并且仔细阅读命令的用法和参数说明。
总结:AD域常用命令是管理和操作域控制器、用户、组等的重要工具。
通过这些命令,我们可以方便地创建、修改和查询域中的资源和用户信息,实现对整个网络环境的有效管理。
RTI Utilities 用户手册-V01

4.RECOVER 页 ........................................................................................................... 14
4.1.Directory of files(文件目录) ..................................................................................... 14 4.2.Download Options(下载选项).................................................................................. 14 4.3.Summary of Download(下载汇总)........................................................................... 15 4.4.File Conversion(文件转换) ....................................................................................... 15 4.5.下载数据流程................................................................................................................ 15
5.WAVEPROC 页 ........................................................................................................ 16
走航ADCP简明操作过程
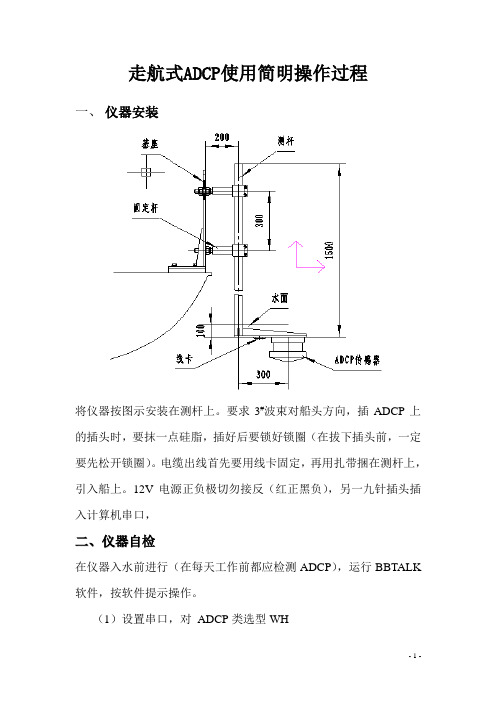
走航式ADCP使用简明操作过程一、仪器安装将仪器按图示安装在测杆上。
要求3#波束对船头方向,插ADCP上的插头时,要抹一点硅脂,插好后要锁好锁圈(在拔下插头前,一定要先松开锁圈)。
电缆出线首先要用线卡固定,再用扎带捆在测杆上,引入船上。
12V电源正负极切勿接反(红正黑负),另一九针插头插入计算机串口,二、仪器自检在仪器入水前进行(在每天工作前都应检测ADCP),运行BBTALK 软件,按软件提示操作。
(1)设置串口,对ADCP类选型WH(2)设置波特率9600 (3)发送唤醒命(4)运行TestWH.rds 命令文件,自动完成测试在“文件”菜单中选“发送命令文件”(文件名:TestWH.rds)随即开始自动检测,按提示操作,当提示rubber beam 1 时,用手快速摩擦波束1的超声波发射面,如果正常会显示“pass”,随后再分别摩擦波束2、3、4的超声波发射面,正常显示“pass”,表明检测通过。
可以将仪器连同测杆装入水中,进行断面流量测量。
三、数据采集运行WinRiver软件1、参数设置(1)在“文件”菜单中选“采集模式”(2)设置通讯口在“设置”中选“通讯”,然后点击“增加”,按实际情况分别设置连接ADCP, GPS 等设备的串口参数。
(3)自动设置仪器参数“配置向导”是WinRiver V.1.03 版的特色,它的功能是按照用户提供的具体河流数据,根据RDI公司的专家经验自动设置仪器参数。
在“设置”中选“配置向导”。
在弹出菜单中,根据实际情况填写所有的空格,尤其是“ADCP配置”。
然后点击“运行向导”,程序会根据所填数据自动确定仪器参数,如水层单元个数,水层单元厚度,测流模式等。
最后点击“确定”退出该菜单。
如果程序发现可能发生如“流动底”等问题,将会在警告窗口显示相应的警告信息,但不影响其设置仪器参数。
(4)检查仪器设置在“设置”中选“配置设置”,检查各菜单参数设置。
一般不需要修改设置值,但对有经验的用户,可以在“命令”菜单中的“用户命令”栏中输入自己的命令。
ARM指令集

ARM处理器的指令集ARM处理器的指令找了好久都没有找到完整版,在这里我把所有用过的ARM指令都整理下来,方便大家参考。
ADC(不更改状态寄存器): 带进位的加法(Addition with Carry)ADCS(更改状态寄存器)R1, R5, R9 ; R1=R5+R9,带进位ADD : 加法(Addition)ADD R0, R1, #256 ; R0 = R1 + 256AND : 逻辑与(logical AND)AND R0, R0, #3 ; R0 = 保持R0 的位0和1,丢弃其余的位。
BIC : 位清除(Bit Clear)BIC R0, R0, #%1011 ; 清除R0 中的位0、1、和3。
保持其余的不变。
EOR : 逻辑异或(logical Exclusive OR)EOR R0, R0, #3 ; 反转R0 中的位0 和1MOV : 传送(Move)MOV PC, R14 ; PC=R14MOVS PC, R14 ; 退出到调用者并恢复标志位(不遵从32-bit 体系)MVN : 传送取反的值(MoveNegative)MVN R0, #4 ; R0 = -5ORR : 逻辑或(logical OR)ORR R0, R0, #3 ; 设置R0 中位0 和1RSB : 反向减法(Reverse Subtraction)RSB R0, R1, R2 ; R0 = R2 - R1RSC : 带借位的反向减法(Reverse Subtraction with Carry)RSC{条件}{S} <dest>, <op 1>, <op 2>dest = op_2 - op_1 - !carrySBC : 带借位的减法(Subtraction with Carry)SBC{条件}{S} <dest>, <op 1>, <op 2>dest = op_1 - op_2 - !carrySUB : 减法(Subtraction)SUB R0, R1, #256 ; R0 = R1 - 256ARM 处理器组建了可以与数据处理指令(ADC、ADD、AND、BIC、CMN、CMP、EOR、MOV、MVN、ORR、RSB、SBC、SUB、TEQ、TST)一起使用的桶式移位器(barrel shifter)。
单片机指令表汇总
51单片机指令表汇总51单片机是一种广泛应用的微控制器,其指令集是进行编程的基础。
下面将51单片机的指令表进行汇总,以帮助初学者更好地理解其指令集。
一、数据传输指令1、MOV指令:将源操作数的内容传送到目标操作数。
2、XCH指令:将两个操作数的内容互换。
3、MOVC指令:从外部存储器将数据传送到目标操作数。
4、MOVX指令:将外部存储器中的数据传送到目标操作数。
5、PUSH指令:将数据压入堆栈。
6、POP指令:从堆栈中弹出数据。
二、算术运算指令1、ADD指令:将两个操作数相加,并将结果存放在目标操作数中。
2、SUB指令:从目标操作数中减去源操作数,并将结果存放在目标操作数中。
3、MUL指令:将两个操作数相乘,并将结果存放在目标操作数中。
4、DIV指令:将目标操作数除以源操作数,并将结果存放在目标操作数中。
5、ANL指令:对目标操作数和源操作数进行按位与运算,并将结果存放在目标操作数中。
6、ORL指令:对目标操作数和源操作数进行按位或运算,并将结果存放在目标操作数中。
7、XRL指令:对目标操作数和源操作数进行按位异或运算,并将结果存放在目标操作数中。
8、CPL指令:对目标操作数进行按位取反运算,并将结果存放在目标操作数中。
9、INC指令:将目标操作数加1。
10、DEC指令:将目标操作数减1。
11、ASR指令:将目标操作数右移n位,最高位用符号位补齐。
12、LSR指令:将目标操作数右移n位,最低位用0补齐。
13、ROL指令:将目标操作数循环左移n位,最高位移入最低位。
14、ROR指令:将目标操作数循环右移n位,最低位移入最高位。
单片机汇编指令表一、概述在单片机的世界里,汇编语言扮演着举足轻重的角色。
它是一种低级语言,能够直接与硬件进行交互,提供高效的代码执行效率。
下面,我们将详细列出一些常见的单片机汇编指令,以及它们的功能。
二、指令表1、MOV指令:用于将数据从一个寄存器移动到另一个寄存器。
例如,MOV R1, R2将把 R2的内容移动到 R1中。
ADCP的操作流程(资阳局)

三、WinRiver 软件
主画面
首先需要从菜单文件中选择采集模式,方法见下图。
采集模式
采集模式
• 点键采集模式后屏幕上会出现下面的画 面,要求是否载入配置文件。
• 一般情况下是点键否,因为各地的测量 条件是不一样的,每处最好需要重新设 置。
通讯参数设置
• 波特率设置可通过下拉菜单来进行。
在有线方式时选择9600;无线方式时选择115200。 其他三项参数则不需要设置,选用默认值即可。
按下一步后进入操作设置
• 此项主要是设置操作方式,如下所示。
在有线方式时选择第一项和最后一项。第一项为发送“Break”唤
醒 ADCP,最后一项为当改变波特时则自动发送“CK”保存数据 。
下一步---完成 3、参数设置:通讯端口 COM10(根据个人电
脑蓝牙端口设置,hp4321为COM10) 波特率 115200 数据位 8 校检位 无
停止位 1 可以根据此参数采用BBtalk进行测试
二、BBTalk的操作
• BBTalk一种超级终端软件,可以利用直 接命令来操作ADCP,主要用于设定 ADCP:例如波特率、时钟和用于系统检 测、问题诊断。一般要求在每次测量前 (下水前)都要运行BBTalk软件来对 ADCP进行检测,从而确保ADCP设备的 正常可靠运行。
水跟踪模式性能一览1200khzadcpwm1wm5wm11wm12单元尺寸cm25200最小剖面深度m09060303最大剖面深度m30最大流速ms1010应用通常情况低流速浅水低流速浅水通常情况局限性浅水1水深4m流速稳定平台备注不易出问题水深4取代模式5较深水也可以用比模式1精度高或节省能量常用命令设置示意说明水跟踪呯的数目为4底跟踪呯的数目为4设定高精模式11设定肓区为25cm设定单元尺寸为10cm设定单元个数为52这里假设深度为5mwm5wm11适用于低流速浅水河流wm12适用于高流速浅水河流一台adcp可用于多种水流条件模式单元尺寸cm呯速率hz标准差cms1秒平均标准误差cms最小剖面深度50251812718090403070711100403060312502515184618091225121536931005括号外为600khz括号内为1200khz盲区假定为25cm10cm
使用Ethernet下载RTI-ADCP数据

使用Ethernet连接ADCP下载数据
一、打开Utilites软件, 点击”Comms”页,选择波特率”115200”(默认)。
点击Scan
二、点击“Terminal”页,点击“break”唤醒仪器;然后在下面命令框输入“IP”,此时返回IP信息。
再输入“CEMAC”,启用网口功能,成功后返回相应信息。
在此输入命令
三、点击“Comm”页,修改红框中的IP地址确保和上述第四步得到的IP地址一致,选择“Ethernet”。
把仪器和电脑连接好(电源适配器、水下电缆、串口线、Ethernet线)后,找到电脑的“本地连接”,右键“属性”设置固定IP地址,但不能和仪器IP(上面第二步的IP)一样。
四、点击“配置”项,选择“连接速度和双工模式”,右侧选择“10 Mbps 半双工”或者“10 Mbps 全双工”
五、点击“ADCP Recover”页,点击“ADCP Directory”,此时将有数据列出。
六、点击”ADCP Download”。
下载好的数据将放在“C:\RTI_Download_Data”这个目录里。
数据放在这个目录里,为原始的二进制数据。
ADCP操作注意
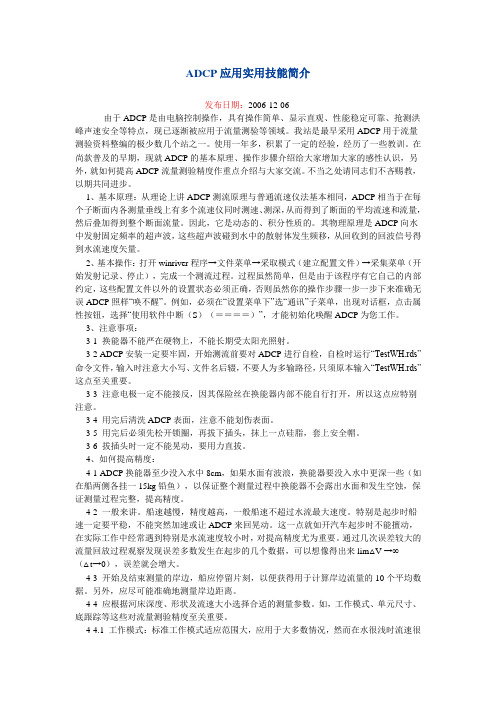
ADCP应用实用技能简介发布日期:2006-12-06由于ADCP是由电脑控制操作,具有操作简单、显示直观、性能稳定可靠、抢测洪峰声速安全等特点,现已逐渐被应用于流量测验等领域。
我站是最早采用ADCP用于流量测验资料整编的极少数几个站之一。
使用一年多,积累了一定的经验,经历了一些教训。
在尚款普及的早期,现就ADCP的基本原理、操作步骤介绍给大家增加大家的感性认识,另外,就如何提高ADCP流量测验精度作重点介绍与大家交流。
不当之处请同志们不吝赐教,以期共同进步。
1、基本原理:从理论上讲ADCP测流原理与普通流速仪法基本相同,ADCP相当于在每个子断面内各测量垂线上有多个流速仪同时测速、测深,从而得到了断面的平均流速和流量,然后叠加得到整个断面流量。
因此,它是动态的、积分性质的。
其物理原理是ADCP向水中发射固定频率的超声波,这些超声波碰到水中的散射体发生频移,从回收到的回波信号得到水流速度矢量。
2、基本操作:打开winriver程序→文件菜单→采取模式(建立配置文件)→采集菜单(开始发射记录、停止),完成一个测流过程。
过程虽然简单,但是由于该程序有它自己的内部约定,这些配置文件以外的设置状态必须正确,否则虽然你的操作步骤一步一步下来准确无误ADCP照样“唤不醒”。
例如,必须在“设置菜单下”选“通讯”子菜单,出现对话框,点击属性按钮,选择“使用软件中断(S)(====)”,才能初始化唤醒ADCP为您工作。
3、注意事项:3-1 换能器不能严在硬物上,不能长期受太阳光照射。
3-2 ADCP安装一定要牢固,开始测流前要对ADCP进行自检,自检时运行“TestWH.rds”命令文件,输入时注意大小写、文件名后辍,不要人为多输路径,只须原本输入“TestWH.rds”这点至关重要。
3-3 注意电极一定不能接反,因其保险丝在换能器内部不能自行打开,所以这点应特别注意。
3-4 用完后清洗ADCP表面,注意不能划伤表面。
单片机电压指令

单片机电压指令单片机的电压指令通常使用ADC模块实现,具体实现方式如下:1. 配置ADC模块,设置参考电压和采样精度。
2. 启动ADC模块。
3. 等待ADC采样结束。
4. 读取ADC数据寄存器,得到采样到的电压值。
5. 根据ADC参考电压和采样精度,计算出电压实际值。
一些常见的单片机电压测量指令如下:在51单片机上:1. 初始化端口和ADC:```void ADC_Init(void){P1ASF |= 0x01; //开启P1.0口的ADC功能ADC_RES = 0; //清除结果暂存器ADC_CONTR = 0xE0; //打开ADC电源,设置转换时间}```2. 进行AD转换:```uint16_t ADC_Read(uint8_t ch){ADC_CONTR = ADC_POWER | ADC_SPEEDH | ch | ADC_START; _nop_();_nop_();_nop_();_nop_();while(!(ADC_CONTR & ADC_FLAG)); //等待转换完成ADC_CONTR &= ~ADC_FLAG; //清除ADC转换标志return ADC_RES;}```在STM32单片机上:1. 配置ADC模块:```ADC_HandleTypeDef AdcHandle;ADC_ChannelConfTypeDef ChannelConfig;AdcHandle.Instance = ADC1;AdcHandle.Init.ScanConvMode = DISABLE;AdcHandle.Init.ContinuousConvMode = DISABLE;AdcHandle.Init.DiscontinuousConvMode = DISABLE;AdcHandle.Init.NbrOfDiscConversion = 0;AdcHandle.Init.DataAlign = ADC_DATAALIGN_RIGHT;AdcHandle.Init.NbrOfConversion = 1;AdcHandle.Init.DMAContinuousRequests = DISABLE;AdcHandle.Init.EOCSelection = ADC_EOC_SINGLE_CONV;if(HAL_ADC_Init(&AdcHandle) != HAL_OK){// ADC初始化失败}//配置采样通道ChannelConfig.SamplingTime = ADC_SAMPLETIME_56CYCLES;ChannelConfig.Channel = ADC_CHANNEL_0;if(HAL_ADC_ConfigChannel(&AdcHandle, &ChannelConfig) != HAL_OK){// ADC采样通道配置失败}```2. 进行AD转换:```HAL_ADC_Start(&AdcHandle);HAL_ADC_PollForConversion(&AdcHandle, 100); //等待 ADC 转换完成,最多等待 100ms if(HAL_IS_BIT_CLR(ADC->SR, ADC_SR_EOC)){// ADC转换失败}uint16_t value = HAL_ADC_GetValue(&AdcHandle); //读取 ADC 转换结果```。
单晶输出指令

单晶输出指令1. 引言单晶输出指令是在单片机编程中非常常见的操作之一。
单片机作为嵌入式系统的核心,通过输出指令来控制外部设备的工作状态。
本文档将介绍一些常用的单晶输出指令及其使用方法。
2. 常用的单晶输出指令2.1. GPIO 概述GPIO 是指通用输入输出,是单片机与外部设备进行数据交互的接口。
通过使用 GPIO 输出指令,可以将指定的数据传送到外部设备。
2.2. digitalWrite 指令digitalWrite(PIN, HIGH/LOW);digitalWrite 是一种常用的单晶输出指令,用于将指定引脚输出高电平或低电平。
其中,PIN 是需要控制的引脚号,HIGH 表示输出高电平,LOW 表示输出低电平。
PIN是需要控制的引脚号,HIGH表示输出高电平,LOW表示输出低电平。
2.3. analogWrite 指令analogWrite(PIN, VALUE);analogWrite 指令用于模拟输出,可以通过改变引脚上的电压值控制外部设备,比如控制 LED 的亮度。
其中,PIN 是需要控制的引脚号,VALUE 是输出的模拟值(取值范围在 0 到 255 之间)。
PIN是需要控制的引脚号,VALUE是输出的模拟值(取值范围在0 到 255 之间)。
2.4. portWrite 指令portWrite(PORT, VALUE);portWrite 指令可以一次性将一个端口的所有引脚进行统一的输出控制。
其中,PORT 是指需要控制的端口号,VALUE 是输出的控制值。
PORT是指需要控制的端口号,VALUE是输出的控制值。
3. 简单示例以下是一个简单的示例,用于演示如何使用 digitalWrite 指令控制 LED 的亮灭:define LED_PIN 13void setup() {pinMode(LED_PIN, OUTPUT);}void loop() {digitalWrite(LED_PIN, HIGH);delay(1000);digitalWrite(LED_PIN, LOW);delay(1000);}在上述示例中,我们将引脚 13(通常与板上的 LED 相连)设置为输出模式,并通过高低电平的切换实现 LED 的亮灭效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Firmware Commands:FMSHOW = Firmware VersionSystem Deployment Commands:START = Start pinging continuouslySTARTME = Start pinging for 1 Ensemble then stop/sleepSTARTHPR n = Output HPR until STOP,START,or BREAK. 0=off,1=cmdport,2=RS232,3=RS485,4=RS422STOP = Stop pingingSLEEP = Power down systemSLEEPSECONDS n = Countdown to sleep in seconds if stoppedSPOS = Display system Geo PositionSPOS Lat(deg),Lon(deg),Depth(m),height(m) = Geo Position, water Depth, height above bottomSTIME = Display system TimeSTIME YYYY/MM/DD,HH:MM:SS = Set system TimeData Storage Commands:DSXRfilename.abc = XMODEM file uploadDSXTfilename.abc = XMODEM file downloadDSFORMAT = Format/Erase the SD cardDSDIR = Show directory of stored filesDSSHOW = Show SD card usageConfiguration Commands:CLOAD = Load conf from SDCSA VE = Save conf to SDCSHOW = Show confCDEFAULT = Restore conf defaultsMode:CDVL = enables DVL ModeCPROFILE = enables Profiling modeWater Profiling:CWPON n = Water Profile 0=disable, 1=enableCWPRT m,b,e = Water Profile Range Trackingm = 0=disable, 1=enable, 2=enable use pressure sensor windowb = begin bine = end binCWPBB n,m,x,r = n = 0 NB,n = 1 Coded BB,n = 2 Non Coded BBn = 3 Coded pulse to pulse,n = 4 Non Coded pulse to pulse,n = 5 Coded BB w/Same Ping Ambiguity resolver,n = 6 Coded BB pulse to pulse w/ Seperate Ping Ambiguity resolver;m = profiling lag(m);x = xmt bandwidth controlr = rcv bandwidth controlCWPAP 1,2,3,4,5 = ambiguity pings,lag(m),bl(m),bs(m),tbp(s)CWPST c,q,v = c=corthres(0to1), q=qthres(m/s),v=vthres(m/s).CWPBL n = Blank (m)CWPBS n = Bin Size (m)CWPX 1,2,3 = Xmt Size (m),0 = full power xmt 1 = one element xmt, beam enable (1111) CWPBN n = BinsCWPP n = Profile Pings Per EnsembleCWPBP n,t = Base Pings per ping, Time Between Base Pings (s)CWPTBP t = Time Between Pings (s)Ensemble:CEPO cccccccccccc = Ensemble Ping Order c=0-ECEI HH:MM:SS.hh = Ensemble IntervalCBI HH:MM:SS.hh,n,m = Burst Interval, Ensembles per Burst, Burst pair, Waves modeCETFP YYYY/MM/DD,HH:mm:SS.hh = Ens Time First PingCERECORD n,m = n=Ensemble Recording,m=SinglePing Recording 0=disable, 1=enable CEOUTPUT n = Ensemble Output 0=disable, 1=binary, 2=text, 3=Status, 4=OSDVL,bin C232OUT n = same as CEOUTPUTC485OUT n = same as CEOUTPUTC422OUT n = same as CEOUTPUTCUDPOUT n = same as CEOUTPUT but limited to ASCII strings onlyBottom Tracking:CBTON n = Bottom Track 0=disable, 1=enableCBTBB n,m,d,x = n = 0 NB,n = 1 Coded BB,n = 2 Non Coded BB,n = 4 Non Coded pulse to pulsen = 7 Auto Switch n=0,n=2,n=4;m = pulse to pulse lag(m);d = long range Narrowband auto switch depth(m).x = 1 one beam xmt at a timex = 2 two beams xmt at a timex = 4 four beams xmt at a timeCBTST c,q,v = c=corthres(0to1), q=qthres(m/s),v=vthres(m/s).CBTT a,b,c,d = a=SNR(dB)shal,b=depth(m) switch,c=SNR(dB)deep,d=depth(m) Gain switchCBTBL n = Blank (m)CBTMX n = Max Depth (m)CBTTBP t = Time Between Pings (s)CBTFILT a,b,c,d,e = a=OutputFiltTC,b=RefFiltTC,c=OutlierCount,d=OutlierThreshold,e=CoastCountWater Tracking:CWTON n = Water Track 0=disable, 1=enableCWTBB n = Broadband 0=disable, 1=enableCWTBL n = Blank (m)CWTBS n = Bin Size (m)CWTTBP t = Time Between Pings (s)Environmental:CWSSC a,b,c,d = Speed Of Sound Control 0=command, 1=sensor, 2=calculatea = Water Temperatureb = Transducer Depthc = Salinityd = Speed of SoundCWS n = Water Salinity(ppt)CWT n = Water Temperature (degrees)CTD n = Transducer Depth (m)CWSS n = Water Speed of Sound (m/s)CHO n,n,n = (+-180 deg) Heading Offset,System to Ship Offset,System to PNI OffsetCHS n = Heading Source 0=none,1=PNI,2=HDTCTS n = Tilt Source 0=none,1=PNICVSF n,n = Water Velocity Scale Factor, Bottom Velocity Scale FactorCPZ = Zero Pressure SensorCommunications:CEMAC Enable EthernetCBAUD n = current port bps. Temporary bps rate until sleep or BREAKC232B n = RS232 bpsC485B n = RS485 bpsC422B n = RS422 bpsvalid bits-per-second 921600,460800,230400,115200,38400,19200,9600,4800,2400CTRIG n = External Trigger 0=disable, 1=High, 2=Low, 3=LowToHigh, 4=HighToLow Diagnostics:DIAGCPT = Compass Pass ThruDIAGPRESSURE = Pressure Sensor infoDIAGRUB = Beam Continuity TestDIAGBOOST = Tests the transmit boost charger.DIAGSD = show the SD register values.DIAGPNI nn = 0 Compass Infon = 1 Heading, Pitch, Rolln = 2 Heading, Pitch, Roll ContinuousDIAGSAMP nn = 1 Diagnostic Pingn = 2 Diagnostic Ping ContinuousDIAGSPECTRUM n = number of samples for each point (default 2000)DIAGRTC nn = 1 show RTC registersn = 2 show RTC registers ContinuousDIAGRCV nn = 1 Test Receiver Hardwaren = 2 Test Receiver Hardware ContinuousDIAGXMT nn = 1 Test Transmitter Hardwaren = 2 Test Transmitter Hardware ContinuousNote: Water Profiling, Bottom Tracking, and Water Tracking commands can be followed by a pair of brackets and a number (i.e. CWPON[1] 1<CR>) to set a selected subsystem configuration. The brackets are optional for subsystem zero [0].。