51单片机串口通信,232通信,485通信,程序
51单片机实现的485通讯程序
标签:modbus8051源程序modbus协议--51端程序的实现RTU需要一个定时器来判断3.5个流逝时间。
#define ENABLE 1#define DISABLE 0#define TRUE 1#define FAULT 0#define RECEIVE_EN 0#define TRANSFER_EN 1#define MAX_RXBUF 0x20extern unsigned char emissivity;extern unsigned char tx_count,txbuf[15];extern unsigned char rx_count,rxbuf[15];extern unsigned char tx_number,rx_number;extern bit rx_ok;unsigned char rx_temp;void InitTimer1() //针对标准8051{TMOD=(TMOD|0xf0)&0x1f; //将T1设为16位定时器TF1=0;TH1=0x62; //设T1位3.5位的接收时间35bit/9600bit/s=3.646msTL1=0x80;//晶振为11.0592MHz,T=65535-3.646ms*11.0592MHz/12=0xf2df//0x6280是22.1184M下LPC9XX下的值。
ET1=1;//允许T1中断TR1=1;//T1开始计数}void timer1() interrupt 3 using 2 //定时器中断{TH1=0x62; //3.646ms interruptTL1=0x80;if(rx_count>=5) //超时后,若接收缓冲区有数则判断为收到一帧{rx_ok=TRUE;}}void scomm() interrupt 4 using 3 //modbus RTU模式{if(TI){TI = 0;if(tx_count < tx_number) //是否发送结束{SBUF = txbuf[tx_count];}tx_count++;}if(RI){rx_temp=SBUF;if(rx_ok==FAULT) //已接收到一帧数据,在未处理之前收到的数舍弃{if(rx_countrxbuf[rx_count]=rx_temp;rx_count++;}TH1=0x62; //timer1 reset,count againTL1=0x80;RI=0;}}在主循环中判断标志rx_ok来执行帧处理。
51单片机串口通信程序。。含详细例子
4.//////////////// /////////////////////////////////////////////////////////
pw.fpReadSign(); SendData();//通知上位机,送出读出器件特征字 }
void Erase()//擦除器件 {
pw.fpErase(); SendData();//通知上位机,擦除了器件 }
void Write()//写器件 {
BYTE n; pw.fpInitPro();//编程前的准备工作 SendData();//回应上位机表示进入写器件状态,
{
unsigned char c;
TMOD = 0x20; // 定时器 1 工作于 8 位自动重载模式, 用于产生波特率
TH1=(unsigned char)(256 - (XTAL / (32L * 12L * baudrate)));
TL1=(unsigned char)(256 - (XTAL / (32L * 12L * baudrate))); SCON = 0x50; PCON = 0x00; TR1 = 1; IE = 0x00; // 禁止任何中断 while(1) {
///////////////////////////////////////////////////////////////////////////////// //所支持的 FID,请在这里继续添加
///////////////////////////////////////////////////////////////////////////// extern void PreparePro00();//FID=00:AT89C51 编程器 extern void PreparePro01();//FID=01:AT89C2051 编程器 extern void PreparePro02();//FID=02:AT89S51 编程器
51单片机的串口通信程序
单片机串口通信程序#include <reg52.h>#include<intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned intsbit Key1 = P2^3;sbit Key2 = P2^2;sbit Key3 = P2^1;sbit Key4 = P2^0;sbit BELL = P3^6;sbit CONNECT = P3^7;unsigned int Key1_flag = 0;unsigned int Key2_flag = 0;unsigned int Key3_flag = 0;unsigned int Key4_flag = 0;unsigned char b;unsigned char code Num[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x40,0x79,0x24,0x30,0x19,0x12,0x 02,0x78,0x00,0x10,0x89};unsigned char code Disdigit[4] = {0x7F,0xBF,0xDF,0xEF};unsigned char Disbuf[4];void delayms(uint t){uint i;while(t--){/* 对于11.0592M时钟,约延时1ms */for (i=0;i<125;i++){}}}//-----------------------------------------------------void SendData(uchar Dat){uchar i=0;SBUF = Dat;while (1){if(TI){TI=0;break;}}}void ScanKey(){if(Key1 == 0){delayms(100);if(Key1 == 0){Key1_flag = 1;Key2_flag = 0;Key3_flag = 0;Key4_flag = 0;Key1 = 1;}else;}if(Key2 == 0){delayms(100);if(Key2 == 0){Key2_flag = 1;Key1_flag = 0;Key3_flag = 0;Key4_flag = 0;Key2 = 1;}else;}if(Key3 == 0){delayms(50);if(Key3 == 0){Key3_flag = 1;Key1_flag = 0;Key2_flag = 0;Key4_flag = 0;Key3 = 1;}else;}if(Key4 == 0){delayms(50);if(Key4 == 0){Key4_flag = 1;Key1_flag = 0;Key2_flag = 0;Key3_flag = 0;Key4 = 1;}else;}else;}void KeyProc(){if(Key1_flag){TR1 = 1;SendData(0x55);Key1_flag = 0;}else if(Key2_flag){TR1 = 1;SendData(0x11);Key2_flag = 0;}else if(Key3_flag){P1=0xff;BELL = 0; CONNECT = 1;Key3_flag = 0;}else if(Key4_flag){CONNECT = 0;BELL = 1;Key4_flag = 0;}else;}void Initdisplay(void){Disbuf[0] = 1;Disbuf[1] = 2;Disbuf[2] = 3;Disbuf[3] = 4;}void Display() //显示{unsigned int i = 0;unsigned int temp,count;temp = Disdigit[count];P2 =temp;temp = Disbuf[count];temp = Num[temp];P0 =temp;count++;if (count==4)count=0;}void time0() interrupt 1 using 2 {Display();TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;}void main(){Initdisplay();TMOD = 0x21;TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;TR0 = 1;ET0 = 1;TH1 = 0xFD; //11.0592MTL1 = 0xFD;PCON&=0x80;TR1 = 1;ET1 = 1;SCON = 0x40; //串口方式REN = 1;PT1 = 0;PT0 = 1;EA = 1;while(1){ScanKey();KeyProc();if(RI){Disbuf[0] = 0;Disbuf[1] = 20;Disbuf[2] = SBUF>>4;Disbuf[3] = SBUF&0x0f;RI = 0;}else;}}。
51单片机串口通信

51单片机串口通信51单片机串口通信(转载)2009-03-03 18:22一、串口通信原理串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。
由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。
串口通信的工作原理请同学们参看教科书。
以下对串口通信中一些需要同学们注意的地方作一点说明:1、波特率选择波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。
MSC- 51串行端口在四种工作模式下有不同的波特率计算方法。
其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。
在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。
在此模式下波特率计算公式为:波特率=(1+SMOD)*晶振频率/(384*(256-TH1))其中,SMOD——寄存器PCON的第7位,称为波特率倍增位;TH1——定时器的重载值。
在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。
这要根据系统的运作特点,确定通信的频率范围。
然后考虑通信时钟误差。
使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。
为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。
下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。
则TH1=256-62500/波特率根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。
列计数器重载值,通信误差如下表:因此,在通信中,最好选用波特率为1200,2400,4800中的一个。
2、通信协议的使用通信协议是通信设备在通信前的约定。
单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。
「51单片机」RS232串口通信代码分析

「51单⽚机」RS232串⼝通信代码分析想来想去不知道要怎么样把232串⼝通信说清楚,想想还是直接把代码分析⼀遍吧...重点是“常⽤波特率与定时器1的参数关系”这张表格!波特率的设置很重要!⼀、串⼝初始化void usart_init(){SCON = 0x50; //REN=1允许串⾏接受状态,串⼝⼯作模式1TMOD = 0x20; //定时器⼯作⽅式2PCON = 0x00;TH1 = 0xFD; //波特率9600、数据位8、停⽌位1。
效验位⽆ (11.0592M)TL1 = 0xFD;ES = 1; //开串⼝中断EA = 1; //开总中断TR1 = 1; //启动定时器}SCON寄存器1.SM0、SM1:串⾏⼝⼯作⽅式控制位2.SM2:多机通信控制位3.REN:允许接收位4.TB8:发送接收数据位85.RB8:接收数据位86.TI:发送中断标志位 TI=1表⽰帧发送结束7.RI:接收中断标志位 RI=1表⽰帧接收完成1.GATE:门控制位 GATE=0,仅受TRX控制 GATE=1,受TRX和外部中断引脚共同控制2.C/T:定时器模式和计数器模式选择器 C/T=1,计数器 C/T=0,定时器3.M1、M0:⼯作⽅式选择位PCON寄存器SMOD:是波特率是否加倍的选择位。
SMOD=0时:波特率不加倍。
SMOD=1时:波特率加倍。
⼆、串⼝数据发送void send_data(unsigned char a){SBUF = a; //SUBF接受/发送缓冲器while(0 == TI); //每次等待发送完毕,再执⾏下⼀条TI=0; //⼿动清0}SBUF:有两个物理上独⽴的接收、发送缓冲器SBUF,它们占⽤同⼀地址99H ;接收器是双缓冲结构;发送缓冲器,因为发送时CPU是主动的,不会产⽣重叠错误。
TI:发送中断标志位 TI=1表⽰帧发送结束三、串⼝中断程序void ser_int (void) interrupt 4using1{if(1 == RI) //RI接受中断标志{RI = 0; //清除RI接受中断标志ReData = SBUF; //SUBF接受/发送缓冲器Flag=1; //标志位置1表⽰有新数据进来}}RI:接收中断标志位 RI=1表⽰帧接收完成四、总代码#include<reg51.h>//变量声明unsigned char SenData, //发送数据Flag, //标志位ReData; //接收数据//函数声明void usart_init(); //串⼝中断初始化void send_data(unsigned char a); //串⼝数据发送//---------------------------//串⼝中断初始化//---------------------------void usart_init(){SCON = 0x50; //REN=1允许串⾏接受状态,串⼝⼯作模式1TMOD = 0x20; //定时器⼯作⽅式2PCON = 0x00;TH1 = 0xFD; //波特率9600、数据位8、停⽌位1。
51单片机串口通信程序。。含详细例子
{ P3_4=0; P3_3=1;
} void RstPro()//编程器复位 {
pw.fpProOver();//直接编程结束 SendData();//通知上位机,表示编程器就绪,可以直接用此函数因为协议号(ComBuf[0])还没被修改,下同 }
void ReadSign()//读特征字 {
} void serial () interrupt 4 using 3 //串口接收中断函数 {
if (RI) { RI = 0 ; ch=SBUF; read_flag= 1 ; //就置位取数标志 }
} main()
{ init_serialcom(); //初始化串口 while ( 1 ) { if (read_flag) //如果取数标志已置位,就将读到的数从串口发出 { read_flag= 0 ; //取数标志清 0 send_char_com(ch); } }
while(RI == 0); RI = 0; c = SBUF; // 从缓冲区中把接收的字符放入 c 中 SBUF = c; // 要发送的字符放入缓冲区 while(TI == 0); TI = 0; } }
4.//////////////// /////////////////////////////////////////////////////////
SendData(); } else break;//等待回应失败 } pw.fpProOver();//操作结束设置为运行状态 ComBuf[0]=0;//通知上位机编程器进入就绪状态 SendData(); }
void Lock()//写锁定位
{
pw.fpLock();
SendData();
基于51系列单片机232接口和485接口互换的数据通信的设计与实现
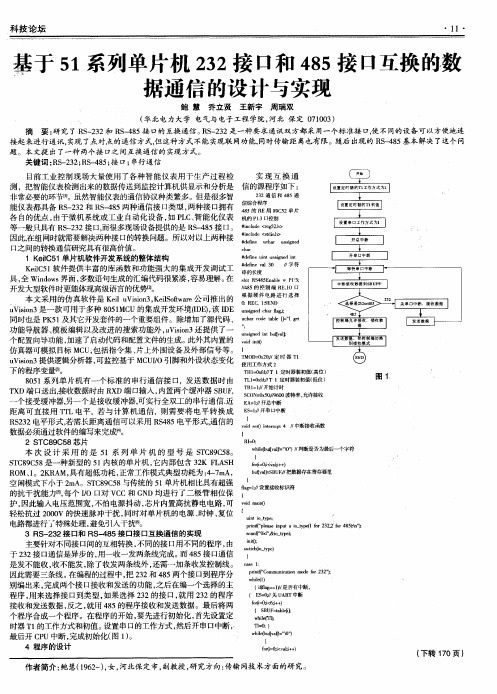
目前 工业控制现场大量使 用 了各种智 能仪表用 于生产过程 检 实 现 互 换 通 测 ,把智 能仪表检测出来的数据传送到监控计算机供显示 和分析是 信 的源程序如下 : 2 2通信 和 4 5通 3 8 非常必要 的环节l 】 l 。虽然智能仪表 的通信协议种类繁多。但是很多智 信综合程序 能仪表都具备 R 一 3 S 2 2和 R 一 8 两种通信接 口类 型, S45 两种接 口拥有 4 5的 RE用 8 C5 8 9 2单片 各 自的优点 , 由于微 机系统或工业 自动化设备 , P C 智 能化 仪表 机的 PI3口控制 如 L、 . 等一般只具有 R 一 3 口, S 2 2接 而很多现场设备提供 的是 R 一 8 口。 #i clde <rg52.> S 4 5接 n u e h #icu e < t oh n ld s di.> 因此, 在组网时就需要解决两种接 口的转换问题。所以对以上两种接 # e n uha u sge dfe i c r ni d n c a hr 口之间的转换通信研究具有很高价值。 # e n n n i e n d f e uitu sg d it i n 1K i 5 单片机软件开发 系统的整体结构 el 1 C # e n a 3 /字符 d f e vl 0 i / K i 5 软件提供丰 富的库 函数和功能强大 的集成开发 调试工 串的长度 eC 1 l 具 , Widw 界面 , 全 no s 多数语句生成的汇编代码很紧凑 , 容易理解。 在 sbi 485Ena l = Pl3; t RS be * /8 / 5的控制 端 R , 口 4 EI O 开发大型软件时更能体现高级语言的优势嘲 。 根 据 硬件 电路 进 行 选择 本文采用 的仿 真软件是 K i u io 3K i ow r 公 司推 出的 0:REC.hSEND e Vs n , e Sf ae l i li u io3是一款可用 于多种 85 MC Vs n i 0 1 U的集成 开发环境O E , I E unsi e cha ; D )该 D g d rⅡ n o t e I 同时也是 P 5 及其它开发套件的一个重要组件 。除增加 了源代码 、 uchar c de abl ” t K1 功能导航 器、 模板 编辑 以及 改进 的搜索功 能外 ,Vs n u io3还提供 了一 u sg e nth 出 i ni di n 个配置向导功能 , 了启动代码和配置文件的生成 。 加速 此外其 内置的 v i nt o iO d i 仿真器可模拟 目标 MC 包括 指令集 、 U, 片上外围设备及外部信号等 。 { T O = x 0 / 时器 T M D 02 ; 定 / 1 u sn Vio3提供逻辑分析器 , i 可监控基于 MC I U/ O引脚和外设状态变化 使用工作方式 2 下的程序变量1 3 ] 。 删 L x  ̄ 1定时器装初值( = d/ 低位 ) 85 0 1系列单片机有一个标 准的 串行通 信接 口, 送数据 时由 T l 0f-T 发 T 11 R = 开始计时 T D端 口送 出, X 接收数据时 由 R D端 口输入 , X 内置两个缓冲器 S U , S O =x0/60 B F C N O5;90 波特率, / 允许接收 个接受缓 冲器, 另一个是接收缓冲器, 可实行 全双工的串行通信 . 近 EA=1/开总 中断 , ' / =; / 距离 可直接用 r'电平, 与计算 机通信 , IL T I 若 则需要 将 电平 转换成 ES I/开串口中断 l R 2 2电平形式, S3 若需长距离通信可以采用 R 4 5电平形式, 的 vi sr ier t4 /中断接收函数 S8 通信 o e tr p / d 0n a 数据必须通过软件 的编写来完成 。 {
(完整word版)51单片机串口max232通信程序
//工作晶振为11.0592MHz,否则出现返回值错误,一个字节的发送#include<regx52.h〉#define uchar unsigned char#define uint unsigned intuchar a,flag;uchar table[]={”very good "};//-———---—-——初始化定时器和串口-void inital_timer1(){TMOD=0X20;//必须使用定时器1,串口使用规定TH1=0Xfd;//定时器1,工作方式2,8位自动重装TL1=0Xfd;//高8位与低8位数值必须相同TR1=1; //定时器1允许位REN=1; //串口使能SM0=0;//串口工作方式设置,工作方式1SM1=1;ES=1; //串口中断使能EA=1; // 总中断使能}//——-—-—————串口中断——--—--—-void gorpe() interrupt 4{RI=0;//接受中断标志位,硬件置1,必须软件置0 a=SBUF;// 特殊功能寄存器flag=1;// 检测标志位}//————-接收数据,并向上位机作出反应(即发送返回数据)—--void display(){uchar i;if(flag==1){ES=0;//关闭串口中断,接下来要发送数据,否则发送完一个数据仍会产生中断,产生死循环for(i=0;i〈10;i++){SBUF=table[i];while(!TI);//判断是否发送完成TI=0;//发送中断标志位}SBUF=a;while(!TI);TI=0;ES=1;flag=0;}}。
51单片机串口通信程序

51单片机串口通信程序51单片机是我国自主研发的一款微控制器,在国内广泛应用于各种电子设备中。
在很多应用场景中,需要通过串口进行通信,以实现数据传输。
本文将介绍51单片机串口通信程序的编写方法。
一、串口介绍串口是一种通信接口,用于在电子设备之间传输数据。
其主要特点是一条通信线路同时只能传输一位数据,因此称为串口。
串口和并口属于不同的通信接口标准。
串口的优点是具有通信距离远、传输速率快、可靠性高等优点,因此广泛应用于各种场合中。
串口有两种工作模式:同步模式和异步模式。
在实际应用中,异步串口通信更为常见。
二、异步串口通信原理在异步串口通信中,数据的传输是通过发送端和接收端的时钟信号不同步实现的。
在发送数据时,发送端会发出一个起始位,接下来是数据位,最后是一个或多个停止位。
在接收端,当检测到起始位时,开始接收数据。
根据通信协议,在接收完数据位后,接收端会判断是否正确,然后再结束本次通信。
1. 硬件连接在51单片机和电脑之间进行串口通信,需要用到串口转USB线。
将串口转USB线的TxD接口与51单片机的P3.1接口相连,RxD接口与P3.0接口相连。
此外,需要一个5V的电源供给51单片机。
2. 准备工作在编写程序之前,需要进行一些准备工作:(1)将P3口设为外部中断P3口的最低2位是外部中断的2个输入端,需要将它们设为中断输入。
EA=1;EX0=1;(2)设置波特率串口通信需要设置波特率。
常见的波特率有9600、19200、38400等。
对应的波特率常数为0xFD、0xFA、0xF4等。
TH1=0xFD;//波特率9600(3)使能串口中断在发送和接收数据时,会不断产生中断,需要将中断使能。
ES=1;//允许串口中断3. 编写程序(1)发送数据void SendData(unsigned char SendBuff[],unsigned int ULength){unsigned int i;for(i=0;i<ULength;i++){SBUF=SendBuff[i];//发送数据while(TI==0); //等待,直到发送完成TI=0;}}(2)接收数据(3)主函数TMOD|=0x20;//定时器1工作方式2TH1=0xFD;//波特率9600TR1=1;//打开定时器1SCON=0x50;//串口方式1,8位数据,无校验,1停止位EA=1;//开总中断ES=1;//开串口中断while(1){SendData(pSendData,4);//发送数据 RecvData(pRecvData,4);//接收数据if(pRecvData[0]=='K'){P0=0x01;//点亮LED}else{P0=0x00;//关闭LED}}}四、总结。
51单片机串口485通讯程序
/* 以下为单片机串口485通讯程序,从机程序(当然也适用于主机程序),主机发送可以先用串口帮手软件来调试,经过Keil uVision4实际测试,测试效果如结尾图片所示, 大部分来自网络,只是改了两个地方: len = sizeof(dbuf),if(i >=( __ERRLEN+1)) // 帧超长,错误,返回,就可以实现了,其中的原因自已体会吧*/#ifndef __485_C__#define __485_C__#include <reg51.h>#include <string.h>#include <stdio.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int/* 通信命令*/#define __ACTIVE_ 0x01 // 主机询问从机是否存在#define __GETDATA_ 0x02 // 主机发送读设备请求#define __OK_ 0x03 // 从机应答#define __STATUS_ 0x04 // 从机发送设备状态信息#define __MAXSIZE 0x08 // 缓冲区长度#define __ERRLEN 12 // 任何通信帧长度超过12则表示出错//uchar dbuf[__MAXSIZE]; // 该缓冲区用于保存设备状态信息uchar dbuf[__MAXSIZE];//={0,1,2,3,4,5,6,7}; // 该缓冲区用于保存设备状态信息uchar dev; // 该字节用于保存本机设备号sbit M_DE = P1^0; // 驱动器使能,1有效sbit M_RE = P1^1; // 接收器使能,0有效void get_status(); // 调用该函数获得设备状态信息,函数代码未给出void send_data(uchar type, uchar len, uchar *buf); // 发送数据帧bit recv_cmd(uchar *type); // 接收主机命令,主机请求仅包含命令信息void send_byte(uchar da); // 该函数发送一帧数据中的一个字节,由send_data()函数调用void main(){uchar type;uchar len;/* 系统初始化*/P1 = 0xff; // 读取本机设备号//dev = (P1>>2);dev = 0x01;TMOD = 0x20; // 定时器T1使用工作方式2TH1 = 250; // 设置初值TL1 = 250;TR1 = 1; // 开始计时PCON = 0x80; // SMOD = 1SCON = 0x50; // 工作方式1,波特率9600bps,允许接收ES = 0; // 关闭串口中断//IT0 = 0; // 外部中断0使用电平触发模式//EX0 = 1; // 开启外部中断0EA = 1; // 开启中断/* 主程序流程*/while(1) // 主循环{if(recv_cmd(&type) == 0) // 发生帧错误或帧地址与本机地址不符,丢弃当前帧后返回continue;switch(type){case __ACTIVE_: // 主机询问从机是否存在send_data(__OK_, 0, dbuf); // 发送应答信息,这里buf的内容并未用到break;case __GETDA TA_:// len = strlen(dbuf);//在C51中不能这个函数计算unsigned char型,这个函数只能计算char型len = sizeof(dbuf);// len =0x08;send_data(__STA TUS_, len, dbuf); // 发送设备状态信息break;default:break; // 命令类型错误,丢弃当前帧后返回}}}void READSTATUS() interrupt 0 using 1 // 产生外部中断0时表示设备状态发生改变,该函数使用寄存器组1{get_status(); // 获得设备状态信息,并将其存入dbuf指向的存储区,数据最后一字节置0表示数据结束}/* 该函数接收一帧数据并进行检测,无论该帧是否错误,函数均会返回* 函数参数type保存接收到的命令字* 当接收到数据帧错误或其地址位不为0时(非主机发送帧),函数返回0,反之返回1*/bit recv_cmd(uchar *type){bit db = 0; // 当接收到的上一个字节为0xdb时,该位置位bit c0 = 0; // 当接收到的上一个字节为0xc0时,该位置位uchar data_buf[__ERRLEN]; // 保存接收到的帧__ERRLEN=12;uchar tmp;uchar ecc = 0;uchar i;M_DE = 0; // 置发送禁止,接收允许M_RE = 0;/* 接收一帧数据*/i = 0;while(!c0) // 循环直至帧接收完毕{RI = 0;while(!RI);tmp = SBUF;RI = 0;if(db == 1) // 接收到的上一个字节为0xdb{switch(tmp){case 0xdd:data_buf[i] = 0xdb; // 0xdbdd表示0xdbecc = ecc^0xdb;db = 0;break;case 0xdc:data_buf[i] = 0xc0; // 0xdbdc表示0xc0ecc = ecc^0xc0;db = 0;break;default:return 0; // 帧错误,返回}i++;}switch(tmp) // 正常情况{case 0xc0: // 帧结束c0 = 1;break;case 0xdb: // 检测到转义字符db = 1;break;default: // 普通数据data_buf[i] = tmp; // 保存数据ecc = ecc^tmp; // 计算校验字节i++;}//if(i == __ERRLEN) // 帧超长,错误,返回if(i >=( __ERRLEN+1)) // 帧超长,错误,返回return 0;}/* 判断帧是否错误*/if(i<4) // 帧过短,错误,返回return 0;if(ecc != 0) // 校验错误,返回return 0;if(data_buf[0] != dev) // 非访问本机命令,错误,返回return 0;*type = data_buf[1]; // 获得命令字return 1; // 函数成功返回}/* 该函数发送一帧数据帧,参数type为命令字、len为数据长度、buf为要发送的数据内容*/void send_data(uchar type, uchar len, uchar *buf){uchar i;uchar ecc = 0; // 该字节用于保存校验字节M_DE = 1; // 置发送允许,接收禁止M_RE = 1;send_byte(dev); // 发送本机地址ecc = dev;send_byte(type); // 发送命令字ecc = ecc^type;send_byte(len); // 发送长度ecc = ecc^len;for(i=0; i<len; i++) // 发送数据{send_byte(*buf);ecc = ecc^(*buf);buf++;}send_byte(ecc); // 发送校验字节TI = 0; // 发送帧结束标志SBUF = 0xc0;while(!TI);TI = 0;}/* 该函数发送一个数据字节,若该字节为0xdb,则发送0xdbdd,若该字节为0xc0则,发送0xdbdc */void send_byte(uchar da){switch(da){case 0xdb: // 字节为0xdb,发送0xdbdd TI = 0;SBUF = 0xdb;while(!TI);TI = 0;SBUF = 0xdd;while(!TI)TI = 0;break;case 0xc0: // 字节为0xc0,发送0xdbdcTI = 0;SBUF = 0xdb;while(!TI);TI = 0;SBUF = 0xdc;while(!TI)TI = 0;break;default: // 普通数据则直接发送TI = 0;SBUF = da;while(!TI);TI = 0;}}#endif/* 调试结果*/。
485通讯协议程序怎么写(51单片机的485通信程序案例)

485通讯协议程序怎么写(51单片机的485通信程序案例)
RS-485总线接口是一种常用的串口,具有网络连接方便、抗干扰性能好、传输距离远等优点。
RS-485收发器采用平衡发送和差分接收,因此具有抑制共模干扰的能力,加上收发器具有高的灵敏度,能检测到低达200mv的电压,可靠通信的传输距离可达数千米。
使用RS-485总线组网,只需一对双绞线就可实现多系统联网构成分布式系统、设备简单、价格低廉、通信距离长。
51单片机的485通信程序
#ifndef __485_C__ #define __485_C__
#include 《reg51.h》
#include 《string.h》
#define unsigned char uchar
#define unsigned int uint
/* 通信命令*/
#define __ACTIVE_ 0x01 // 主机询问从机是否存在
#define __GETDATA_ 0x02 // 主机发送读设备请求
#define __OK_ 0x03 // 从机应答
#define __STATUS_ 0x04 // 从机发送设备状态信息
#define __MAXSIZE 0x08 // 缓冲区长度
#define __ERRLEN 12 // 任何通信帧长度超过12则表示出错
uchar dbuf[__MAXSIZE]; // 该缓冲区用于保存设备状态信息
uchar dev; // 该字节用于保存本机设备号
sbit M_DE = P1。
51单片机的串口通信分析

51单片机的串口通信分析1. 简介串口通信是51单片机中常用的通信方式之一,它能够实现通过串行端口将数据传输到其他设备或与其他设备进行通信。
本文将对51单片机的串口通信进行分析与讨论。
2. 串口通信原理串口通信主要包括数据传输、数据格式和通信协议三个方面。
在51单片机中,串口通信使用了UART(通用异步收发传输)协议。
UART协议通过选择适当的波特率、数据位、校验位和停止位等参数,实现串口数据的稳定传输。
3. 串口通信硬件连接在51单片机中,串口通信需要将单片机的串行端口与外部设备连接起来。
一般情况下,串口通信需要使用串口线连接单片机的TXD引脚和RXD引脚与外部设备的对应引脚。
4. 串口通信程序设计51单片机的串口通信程序设计主要包括串口初始化和数据发送与接收两个步骤。
在程序设计中,需要设置适当的波特率、数据位、校验位和停止位等参数,并编写相应的发送和接收函数来实现数据的发送和接收功能。
5. 串口通信应用实例串口通信在51单片机的应用非常广泛,可以用于与PC机的通信、与传感器的通信、与其他单片机的通信等等。
在实际应用中,可以通过串口通信实现数据的传输、控制信号的发送与接收等功能。
6. 总结51单片机的串口通信是一种常用且有效的通信方式,通过合理设置通信参数和编写相应的程序,可以实现稳定的数据传输和通信功能。
在应用中,可以根据具体需求选择适当的串口方式和协议来实现串口通信功能。
以上为本文对51单片机的串口通信进行的简要分析与讨论,希望对读者有所帮助。
参考文献:1. 参考书籍12. 参考书籍2。
51单片机的串口通信程序(C语言)
#include <reg52.h>#include<intrins.h>#include <stdio.h>#include <math.h>#define uchar unsigned char#define uint unsigned intsbit Key1 = P2^3;sbit Key2 = P2^2;sbit Key3 = P2^1;sbit Key4 = P2^0;sbit BELL = P3^6;sbit CONNECT = P3^7;unsigned int Key1_flag = 0;unsigned int Key2_flag = 0;unsigned int Key3_flag = 0;unsigned int Key4_flag = 0;unsigned char b;unsigned char code Num[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00, 0x10,0x89};unsigned char code Disdigit[4] = {0x7F,0xBF,0xDF,0xEF};unsigned char Disbuf[4];void delayms(uint t){uint i;while(t--){/* 对于11.0592M时钟,约延时1ms */for (i=0;i<125;i++){}}}//-----------------------------------------------------void SendData(uchar Dat){uchar i=0;SBUF = Dat;while (1){if(TI){TI=0;break;}}}void ScanKey(){if(Key1 == 0){delayms(100); if(Key1 == 0){Key1_flag = 1; Key2_flag = 0; Key3_flag = 0;Key4_flag = 0;Key1 = 1;}else;}if(Key2 == 0){delayms(100);if(Key2 == 0){Key2_flag = 1; Key1_flag = 0; Key3_flag = 0;Key4_flag = 0;Key2 = 1;}else;}if(Key3 == 0){delayms(50);if(Key3 == 0){Key3_flag = 1; Key1_flag = 0; Key2_flag = 0;Key4_flag = 0;Key3 = 1;}else;}if(Key4 == 0){delayms(50);if(Key4 == 0){Key4_flag = 1;Key1_flag = 0;Key2_flag = 0;Key3_flag = 0;Key4 = 1;}else;}else;}void KeyProc(){if(Key1_flag){TR1 = 1;SendData(0x55);Key1_flag = 0; }else if(Key2_flag){TR1 = 1;SendData(0x11); Key2_flag = 0;}else if(Key3_flag) {P1=0xff;BELL = 0;CONNECT = 1;Key3_flag = 0;}else if(Key4_flag){CONNECT = 0;BELL = 1;Key4_flag = 0;}else;}void Initdisplay(void){Disbuf[0] = 1;Disbuf[1] = 2;Disbuf[2] = 3;Disbuf[3] = 4;}void Display() //显示{unsigned int i = 0;unsigned int temp,count;temp = Disdigit[count]; P2 =temp;temp = Disbuf[count];temp = Num[temp];P0 =temp;count++;if (count==4)count=0;}void time0() interrupt 1 using 2 {Display();TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;}void main(){Initdisplay();TMOD = 0x21;TH0 = (65535 - 2000)/256;TL0 = (65535 - 2000)%256;TR0 = 1;ET0 = 1;TH1 = 0xFD; //11.0592MTL1 = 0xFD;PCON&=0x80;TR1 = 1;ET1 = 1;SCON = 0x40; //串口方式REN = 1;PT1 = 0;PT0 = 1;EA = 1;while(1){ScanKey();KeyProc();if(RI){Disbuf[0] = 0;Disbuf[1] = 20;Disbuf[2] = SBUF>>4;Disbuf[3] = SBUF&0x0f;RI = 0;}else;}}51单片机串口通信C语言程序2**************************************************************; 平凡单片机工作室;ckss.asm;功能:反复向主机送AA和55两个数;主机使用一个串口调试软件设置19200,n,8,1***************************************************************/#include "reg51.h"#define uchar unsigned char#define uint unsigned int//延时程序//////////////////由Delay参数确定延迟时间*/void mDelay(unsigned int Delay){ unsigned int i;for(;Delay>0;Delay--){ for(i=0;i<124;i++){;}}}//////////////////// 主程序////////////////////void main(){ uchar OutDat; //定义输出变量TMOD=0x20; //TMOD=0TH1=0xf3; //12MHZ ,BPS:4800,N,8,1TL1=0xf3;PCON=0x80; //方式一TR1=1; //?????????????????????????????SCON=0x40; //串口通信控制寄存器模式一OutDat=0xaa; //向串口发送固定数据值for(;;) //循环程序{SBUF=OutDat;//发送数据for(;;){ if(TI) //发送中断位当发送停止位时置1,表示发送完成break;}mDelay(500);TI=0; //清零中断位OutDat=~OutDat; //显示内容按位取反}}。
51单片机实现RS485

default: // 普通数据则直接发送TI = 0;SBUF = da;while(!TI);TI = 0;}}#endifRS-232接口实现计算机和单片机通信程序作者:佚名来源:本站原创点击数:…更新时间:2008年07月10日【字体:大中小】//此程序通过RS-232接口来完成计算机和单片机通信(程序已用p1 8f458试验板上调试通过)//程序的调试可以用"串口调试助手V2.1"辅助完成,此程序可在htt p:// 下载//此程序首先发送测试数据55H,再通过中断实现数据的接收和发送#include "p18f458.h"void InterruptHandlerHigh(void);//初始化程序void initial(){SPBRG=0X19; //选择传输波特率为9600bpsTXSTA=0X04; //选择异步高速方式传输8位数据RCSTA=0X80; //允许同步串行口工作TRISC=0X80; //将RC7,RC6设置为输入,断绝与外接电路的连接 TXSTAbits.TXEN=1; //发送允许RCSTAbits.CREN=1; //接受数据允许PIE1bits.RCIE=1; //接收中断使能INTCON=0XC0; //总中断和外围中断允许}//高优先级中断向量#pragma code InterruptVectorHigh=0x08void InterruptVectorHigh (void){_asmgoto InterruptHandlerHigh //跳到中断程_endasm}//高优先级中断服务程序#pragma code#pragma interrupt InterruptHandlerHighvoid InterruptHandlerHigh (){while(PIR1bits.RCIF==1) //若接收中断标志不为1,则为误操作,返回{TXREG=RCREG; //将接收到的数据放入发送寄存器,并启动发送 }}//主程序main(){initial(); //系统初始化TXREG=0X55; //发送数据55H进行测试for(;;);}------------------------------------------汇编语言版本的RS-232接口实现计算机和单片机通信程序------------;此程序通过RS-232接口来完成计算机和单片机通讯(程序以在p18 f458试验板上调通);本单片机程序由提供;此程序首先发送测试数据55H,再通过中断实现数据的接收和发送;程序的调试可以用"串口调试助手V2.1"辅助完成LIST P=18f458INCLUDE "P18f458.INC"ORG 0x00GOTO MAINORG 0x08GOTO INTSERVEORG 0X30;**************中断服务子程序***************INTSERVEBTFSS PIR1,RCIF ;接收中断标志为1?GOTO ERR_RE ;误操作,返回MOVF RCREG,0 ;否则,将接收到的数据通过W寄存器MOVWF TXREG ;放入发送寄存器,并启动发送ERR_RE NOPRETFIE;****************初始化程序***************INITIAL NOPMOVLW 0X19 ;选择传输波特率为9600bpsMOVWF SPBRGMOVLW 0X04 ;选择异步高速方式传输8位数据MOVWF TXSTAMOVLW 0X80 ;允许同步串行口工作MOVWF RCSTAMOVLW 0X80 ;将RC7,RC6设置为输入,断绝与外接电路的连接MOVWF TRISCBSF TXSTA,TXEN ;发送允许BSF RCSTA,CREN ;接受数据允许BSF PIE1,RCIE ;接收中断使能MOVLW 0XC0 ;总中断和外围中断允许MOVWF INTCONRETURN;**********************主程序********************* MAIN NOPCLRWDTCALL INITIALMOVLW 0X55 ;发送数据55H进行测试MOVWF TXREGLOOPGOTO LOOPEND两片51单片机互相通信的串行通信程序(一个发送程序,一个接收程序)2007-05-27 08:27;系统晶振是 11.0592 MHz;51单片机发送单片机程序;此程序用Proteus仿真通过;此程序在硬件上测试通过;2007-05-27;附有简化电路图;为了使初学者能看懂,程序与图尽可能的简单扼要;实验现象为,发送端的P1口的哪个键被接下,接收端的哪个灯对应着亮;如果把两个单片机的T和R通过无线模块(如基于MCP2120芯片的模块)来扩充,便可做成无线通信ORG0000HAJMPSTARTORG0040HSTART:MOVSP,#60HMOVSCON,#50H;串口方式 1MOVTMOD,#20H;T1 方式2MOVTL1,#0FDH;波特率 9600 的常数MOVTH1,#0FDHSETBTR1movr5,#00hWAIT:movp1,#0ffhmova ,p1movr5,alcalldelay ;读键盘,这里去抖动,还要加几句话mova ,p1nopCJNEA,5,WAIT ;是否有键输入MOVSBUF,a;串口输出键盘输入的值NOPSS: JBCTI,WAIT;是否发送完毕SJMPSSDELAY:;延时子程序PUSH;保存现场PUSH1MOV0,#06HDELAY1: MOV 1,#0HDJNZ1,$DJNZ0,DELAY1POP1;恢复现场POPRETEND;系统晶振是 11.0592 MHz;51单片机接收单片机程序;此程序用Proteus仿真通过;此程序在硬件上测试通过;2007-05-27;附有简化电路图;为了使初学者能看懂,程序与图尽可能的简单扼要;实验现象为,发送端的P1口的哪个键被接下,接收端的哪个灯对应着亮;如果把两个单片机的T和R通过无线模块(如基于MCP2120芯片的模块)来扩充,便可做成无线通信ORG0000HAJMPSTARTORG0040HSTART:MOVSCON,#50H;串口方式 1MOVTMOD,#20H;T1 方式 2MOVTL1,#0FDH;波特率 9600 的常数MOVTH1,#0FDHSETBTR1WAIT:JBCRI,DIS_REC;是否接收到数据sjmpwaitDIS_REC:MOVA,SBUF;读串口接收到的数据movp1,aSJMPwaitend51单片机串行口通信程序设计例子时间:2009-03-06 17:13来源:未知作者:牛牛点击: 768次串行口方式0应用编程 8051单片机串行口方式0为移位寄存器方式,外接一个串入并出的移位寄存器,就能扩展一个并行口。
51单片机串口通信

51单片机串口通信串行口通信是一种在计算机和外部设备之间进行数据传输的通信方式,其中包括了并行通信、RS-232通信、USB通信等。
而在嵌入式系统中,最常见、最重要的通信方式就是单片机串口通信。
本文将详细介绍51单片机串口通信的原理、使用方法以及一些常见问题与解决方法。
一、串口通信的原理串口通信是以字节为单位进行数据传输的。
在串口通信中,数据传输分为两个方向:发送方向和接收方向。
发送方将待发送的数据通过串行转并行电路转换为一组相对应的并行信号,然后通过串口发送给接收方。
接收方在接收到并行信号后,通过串行转并行电路将数据转换为与发送方发送时相对应的数据。
在51单片机中,通过两个寄存器来实现串口通信功能:SBUF寄存器和SCON寄存器。
其中,SBUF寄存器用于存储要发送或接收的数据,而SCON寄存器用于配置串口通信的工作模式。
二、51单片机串口通信的使用方法1. 串口的初始化在使用51单片机进行串口通信之前,需要进行串口的初始化设置。
具体的步骤如下:a. 设置波特率:使用波特率发生器,通过设定计算器的初值和重装值来实现特定的波特率。
b. 串口工作模式选择:设置SCON寄存器,选择串行模式和波特率。
2. 发送数据发送数据的过程可以分为以下几个步骤:a. 将要发送的数据存储在SBUF寄存器中。
b. 等待发送完成,即判断TI(发送中断标志位)是否为1,如果为1,则表示发送完成。
c. 清除TI标志位。
3. 接收数据接收数据的过程可以分为以下几个步骤:a. 等待数据接收完成,即判断RI(接收中断标志位)是否为1,如果为1,则表示接收完成。
b. 将接收到的数据从SBUF寄存器中读取出来。
c. 清除RI标志位。
三、51单片机串口通信的常见问题与解决方法1. 波特率不匹配当发送方和接收方的波特率不一致时,会导致数据传输错误。
解决方法是在初始化时确保两端的波特率设置一致。
2. 数据丢失当发送方连续发送数据时,接收方可能会出现数据丢失的情况。
51单片机 RS232程序
#include <reg51.h>#include <stdio.h>#define XTAL 11059200#define baudrate 9600#define OLEN 8unsigned char ostart;unsigned char oend;char idata outbuf[OLEN];#define ILEN 8unsigned char istart;unsigned char iend;char idata inbuf[ILEN];bit sendfull;bit sendactive;/** Serial Interrupt Service Routine*/static void com_isr (void) interrupt 4 using 1 { char c;/*----- Received data interrupt. -------------*/ if (RI) {c = SBUF;RI = 0;if (istart + ILEN != iend) {inbuf[iend++ & (ILEN-1)] = c;}}/*------ Transmitted data interrupt.----------*/ if (TI != 0) {TI = 0;if (ostart != oend) {SBUF = outbuf[ostart++ & (OLEN-1)];sendfull = 0;}else {sendactive = 0;}}}/** Function to initialize the serial port and the UART baudrate. */void com_initialize (void) {istart = 0;iend = 0;ostart = 0;oend = 0;sendactive = 0;sendfull = 0;PCON |= 0x80;TMOD |= 0x20;TH1 = (unsigned char) (256 - (XTAL / (16L * 12L * baudrate))); TR1 = 1;SCON = 0x50;ES = 1;}/** putbuf: write a character to SBUF or transmission buffer*/void putbuf (char c) {if (!sendfull) {if (!sendactive) {sendactive = 1;SBUF = c;}else {ES = 0;outbuf[oend++ & (OLEN-1)] = c;if (((oend ^ ostart) & (OLEN-1)) == 0) {sendfull = 1;}ES = 1;}}}/** Replacement routine for the standard library putchar routine. * The printf function uses putchar to output a character.*/char putchar (char c) {if (c == '\n') {while (sendfull);putbuf (0x0D);}while (sendfull);putbuf (c);return (c);}/** Replacement routine for the standard library _getkey routine. * The getchar and gets functions uses _getkey to read a character. */char _getkey (void) {char c;while (iend == istart) {;}ES = 0;c = inbuf[istart++ & (ILEN-1)];ES = 1;return (c);}/** Main C function that start the interrupt-driven serial I/O. */void main (void) {EA = 1;com_initialize ();while (1) {char c;c = getchar ();printf ("\nYou typed the character %c.\n", c);}}。
51单片机汇编模拟串口通信程序
51单片机汇编模拟串口通信程序T2作为波特率控制UART_RXD是硬中断0或1 口,如果能进入中断,说明该线有一个起始位产生,进入中断后调用下面的接收程序。
退出硬中断之前还需要将硬中断标志重新复位。
UART_TXD是任何其它IO即可。
UART_SEND:P USH IEP USH DPHP USH DPLP USH PSWP USH 00HP USH ACCCLR EASETB UART_TXD ;START BITMOV R0,ACLR TR2 ;TR2置1,计数器2启动,时间计数启动。
MOV A,RCAP2L;计数器2重新装载值MOV TL2,A ;置计数器2初值;T2需要重新装载MOV A,D PH CLR TF2MOV A,RCA P2HMOV TH2,AMOV A,R0SETB TR2 ;TR2 置1,计数器JNB TF2,$CLR TF2JNB TF2,$CLR TF2CLR UART_TXD ;START BITJNB TF2,$CLR TF2JNB TF2,$CLR TF2MOV R0,#08HUART_SEND_L OOP:RRC AMOV UART_TXD,C ;8 BIT JNB TF2,$CLR TF2DJNZ RO,UART_SEND_L OOP SETB UART_TXD ;END BIT JNB TF2,$CLR TF2JNB TF2,$CLR TF2POP ACCPOP OOHPOP PSWPOP DPLPOP DPHPOP IERET....;;;;;;; UART_REC:P USH IEP USH DPHP USH DPLCLR EACLR TR2 ;TR2置1,计数器2启动,时间计数启动。
MOV A,RCAP2L;计数器2 重新装载值CLR TF2MOV TL2,A ;置计数器2初值;T2需要重新装载MOV A,DPHMOV A,RCA P2HMOV TH2,AJB UART_RXD,$ ;RECSETB TR2 ;TR2置1,计数器2启动,时间计数启动。