DSP 第10章 串行外设接口SPI(2学时)
6.6 串行外设接口SPI
名称
功能说明
SPICCR SPICTL SPISTS
SPI配置控制寄存器 SPI操作控制寄存器
SPI状态寄存器
SPI软件复位、SPICLK极性选择、传输 数据长度选择。
SPI中断及超时中断使能、SPICIK相位选 择、主/从操作模式和数据发送使能。
中断及超时中断标志、发送缓冲器满标志。
SPIBRR
SPI波特率寄存器
SPISIMO:从动输入/主动输出引脚 SPISTE:从动发送使能引脚 SPICLK:串行时钟引脚 南京航空航天大学自动化学院DSP技术应用实验室
SPI功能引脚图
南京航空航天大学自动化学院DSP技术应用实验室
地址 7040h 7041h 7042h 7044h 7046h
9个SPI模块寄存器
寄存器
(4).SPI波特率寄存器SPIBRR—地址7044h (5).SPI仿真接收寄存器SPIRXEMU—地址7046h
南京航空航天大学自动化学院DSP技术应用实验室
(6).SPI接收缓冲寄存器SPIRXBUF
SPI模块接收到的数据。 SPIDAT接收完毕数据后,将其传送到SPIRXBUF, 同时置位SPI INTFLAG;数据读出后,自动清除 SPI INTFLAG 。
数据传输波特率(7位)
SPIRXEMU SPI接收仿真缓冲寄存器
存放接收到的数据、支持仿真
7047h 7048h 7049h 704Fh
SPIRXBUF
SPI接收缓冲寄存器
SPITXBUF
SPI发送缓冲寄存器
SPIDAT
SPI串行数据寄存器
SPIPRI SPI中断优先级控制寄存器
存放接收到的数据 存放下一个要发送的数据 存放发送或接收到的数据 规定中断优先级高低及仿真挂起时的操作
DSP-10章AD和11章SPI

[1]允许发送/禁止发送 [0]使能中断/禁止中断.
3.状态寄存器SPISTS:[7]超时标志
(超时:没有取走接收的数据前又接到一个字符)
[6]中断标志 [5]发送缓冲器满标志 4.波特率配置SPIBRR 5.仿真接收缓冲寄存器SPIRXEMU(读时不清中断标志) 6.接收缓冲寄存器SPIRXBUF(右对齐方式) 7.发送缓冲寄存器SPITXBUF 8.发送/接收移寄存器SPIDAT(先高后低) 9.中断优先级控制寄存器SPIPRI
3.ADC时钟预定标:结构如下:
ACQPS3~ACQPS0 */2 CPU clock *1~16 PS S/H (2.PS)
若CPS=0,PS=CLK(fclk=fc)
1 A/d 11.ACLK 一次APC转换时间 S/H时间+AD转换时间
CPS=1,PS=2CLK(fCLK=fc/2)
4.校准模式
五.ADC转换应用举例:
本节介绍一个A/D采样的例程,该程序用事件管理器B的定时器4定时时间 到来触发A/D采样的启动。采样时采用级连模式,一次作16个转换,转换通道分 别是0-15。转换完成后,在A/D中断服务子程序中将转换结果读出。该程序只考 虑了作一次A/D采样。
.include “F2407REGS.H” .def _c_int0 (1)建立中断向量表 .sect “.vectors” RSVECT B _c_int0 INT1 B GISR1 INT2 B PHANTOM INT3 B PHANTOM INT4 B PHANTOM INT5 B PHANTOM INT6 B PHANTOM RESERVED B PHANTOM SW_INT8 B PHANTOM : SWINT31 B PHANTOM
单片机原理_第10章 MCS-51系统的串行接口(教学PPT)

1
10.1 串行通信基础知识
通信的基本方式
• 并行通信:各位数据同时传送。
• 串行通信:数据一位位按顺序传送。
串行接口
2
10.1.1 串行通信的两种基本方式
1. 异步传送方式
收发双方有各自的时钟源控制字符发送 和接收,数据以一个字(字符)为传送单位, 它们在线路上传送不连续。异步传送时, 发送方能采用两种方式传送,即各个字符
2. 数据输入(接收)
当REN=1、SM0=0、SM1=1,并检测到 起始位后,由移位脉冲控制接收数据。当满 足条件:
RI=0; 收到停止位为“1”或SM2=0时,8位数据送 入SBUF,停止位进入RB8,置位中断标志RI。 如果两个条件不满足,数据将丢失。
串行接口
38
串行口方式1的时序
串行接口
串行接口
34
方式0:移位寄存器输入/输出方式
(1) 数据输出(发送) 数据写入SBUF后,数据在移位脉冲(TXD) 控制下, 由RXD端逐位移入74LS164。当8位数据全部移出后, TI由硬件置位,发生中断请求。若CPU响应中断,则 从0023H单元开始执行串行口中断服务程序,数据由 74LS164并行输出。
串行接口
MOV SCON, #80H
方式2:11(9)位异步发送/接收方式
REN=1、SM0=1、SM1=0时,串口以 方式2接收数据。当满足条件:
RI=0,SM2=0 ;
或收到的第9位数据为“1”。
8位数据送入SBUF,第9位数据进入 RB8,置位RI。如果条件不满足,数据将 丢失。
串行接口
串行接口
10
串行通信的基础知识
嵌入式串行外设接口(SPI)全解
8
数据寄存器
SPI发送数据寄存器(SPTDATn) 发送数据寄存器中存放待SPI口发送的数据。
寄存器 SPTDAT0 SPTDAT1 地址 0x59000010 0x59000030 读/写状态 R/W R/W 功能描述 SPI0发送数据寄存器 SPI1发送数据寄存器 复位值 0x00 0x00
SPI接收数据寄存器(SPRDATn) 接收数据寄存器中存放SPI口接收到的数据。
寄存器 SPTDAT0 SPTDAT1 地址 0x59000014 0x59000034 读/写状态 R R 功能描述 SPI0接收数据寄存器 SPI1接收数据寄存器 复位值 0x00 0x00
9
SPI引脚控制寄存器(SPPINn)
接收移位寄存器1
引脚控制逻辑 1
发送1
PCLK
8位分频器 1 预分频器1 状态寄存器 1
REDY DCOL MULF
SPI Clock 主设备 CPOL CPHA
Clock 时钟逻辑 1
SPICLK 1 时钟
nSS 1
从设备
片选
INT0 / INT1 REQ0 / REQ1 ACK0/ ACK1
APB 1/F 1 (INT DMA 1)
当一个SPI系统被允许时,nSS之外的引脚的数据传输方向都由 SPCONn的MSTR位控制,nSS引脚总是输入。 当SPI是一个主设备是,nSS引脚用于检测多主设备错误(如果 SPPIN的ENMUL位被使能),另外还需要一个GPIO 来选择从 设备。 如果SPI被配置为从设备,nSS引脚用来被选择为从设备。
6
SPI控制寄存器(SPICONn)
寄存器 SPCON0
SPCON1
DSPF28335---SPI模块

DSPF28335---SPI模块DSPF28335--串行外设接口(SPI模块)问题1:什么是串行外设接口(SPI)?答:SPI(Serial Peripheral Interface)接口是高速同步串行I/O接口。
问题2:串行通信接口(SCI)和串行外设接口(SPI)主要区别?答:(1)SPI采用同步通讯方式,除了发送和接受两根线之外,还需要一根同步时钟线;SCI采用异步通信方式,只需要发送和接收两根线,通讯双方微处理器使用各自的时钟。
(2)SPI适用于板上短距离高速通讯;SCI适用于对另外的外设长距离的低速率通讯,在默认状态下,其最高通讯速率只相当于SPI通讯速率的1/4。
(3)SPI的时钟可反映在外在的同步时钟线上;SCI的时钟时隐藏的。
问题3:TMS320F28335有几个SPI接口模块?答:有一个专门的SPI模块,另外两个McBSP也可以配置为SPI接口。
问题4:F28335SPI接口由几组寄存器控制?答:12组,位于控制寄存器帧0x7040h开始的位置。
问题5:SPI FIFO模式下如何对传输和接收16级FIFO进行操作?直接对SPITXBUF寄存器进行赋值以传输数据。
例如:SpiaRegs.SPITXBUF=sdata[i],此操作可理解为:首先使TXFIFO头指针加1,然后把值写入TXFIFO头指针指向的位置。
如果当前没有一个激活的传输过程时,对SPITXBUF的写入会激活一个传输过程。
直接读取SPIRXBUF寄存器的值以接收数据。
例如:rdata[i]=SpiaRegs.SPIRXBUF,此操作可理解为:首先从RXFIFO 头指针处读取1个字符,然后使RXFIFO头指针减1。
问题6:SPI FIFO模式下传输和接收中断何时产生?答:是在数据传输或接收结束后,再判断传输和接收FIFO队列中有多少数据(SPIFFTX.TXFFST(4-0)和SPIFFRX.RXFFST(4-0)的值)。
SPI及其接口介绍

一、SPI接口简介SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
SPI有三个寄存器分别为:控制寄存器SPCR,状态寄存器SPSR,数据寄存器SPDR。
外围设备FLASHRAM、网络控制器、LCD显示驱动器、A/D 转换器(如图一所示)和MCU等。
图一、ADC中的SPI二、SPI接口一个典型的SPI模块的核心部件是一个8位的移位寄存器和一个8位的数据寄存器SPIDR。
通过SPI进行数据传送的设备有主SPI和从SPI之分,即SPI传送在一个主SPI和一个从SPI之间进行。
图二给出了两个SPI模块相互连接、进行SPI传送的示意图,图左边是一个主SPI,图右边为一个从SPI。
图二、典型SPI示意图在AN-877应用笔记中,对spi的接口定义与典型spi接口有所不同,AN-877使用一根线SDIO代替了典型SPI的MISO和MOSI,SS接口用CSB代替。
图三和图四分别是双线模式下单器件控制(主从一对一)和双线模式下多器件控制(主从一对多)。
图三:主从一对一控制图四:主从一对多控制但是原理都一样。
主从机之间一般由3个引脚组成:串行时钟引脚(SCLK)、串行数据输入/输出引脚(SDIO)、片选引脚(CSB)。
1、引脚数据输入/输出(SDIO):该引脚用作数据的输入/输出,用作输入还是用作输出具体取决于所发送的指令(读或写)以及时序帧中的相对位置(指令周期或数据周期)。
在读或写的第一个阶段,该引脚用作输入,将信息传递到内部状态机。
如果该命令为读命令,状态机把该引脚(SDIO)变为输出,然后该引脚将数据回传给外部控制器。
如果该命令为写命令,该引脚始终用作输入。
串行时钟(SCLK):SCLK由外部控制器提供,时钟频率最高为25MHZ。
所有数据的输入输出都是与SCLK同步的。
输入数据在SCLK的上升沿有效,输出数据在SCLK的下降沿有效。
《DSP控制技术》课程教学大纲

DSP控制技术课程教学大纲DSPContro1Techno1ogy学时数:48其中:实验学时:8学分数:3适用专业:普通本科电气工程与自动化专业一、课程的性质、目的和任务本课程是电气工程与自动化本科专业的的专业选修课。
数字信号处理己发展成一门理论与实践紧密结合的、应用日益广泛的、迅速替代传统模拟信号处理方法的、具有丰富器件支持的先进技术和方法。
DSP 器件是数字信号处理技术的最佳载体。
了解和掌握数字信号处理的实用技术对电气类学生而言,显得越来越重要且迫切。
数字信号处理器是微处理器技术发展的一个重要分支,处理的高速性和高集成度和在信号处理方面的卓越性能,使其在IT业界的用途越来越广。
本课程正是顺应这一发展方向而为电气工程与自动化本科专业学生开设的专业选修课。
本课程的目的是使该专业学生在数字信号处理器件及应用方面具有一定的基础知识,掌握DSP的结构、工作原理、特性、应用及发展方向,使该专业毕业生在工作中具有利用DSP 开发产品和解决实际问题的基本能力。
二、课程教学的基本要求本课程以TMS320F2xx为蓝本,剖析TMS320'C2000系列数字信号处理器的结构、内部资源、运行方式和指令系统、开发系统。
借鉴DSP系统实例,要求学生了解DSP的原理、用途和性能,了解软件集成开发环境的使用,掌握采用DSP进行工程项目开发的过程和软硬件调试工具的使用,熟练掌握使用汇编/C语言编写应用处理程序的方法。
本课程总学时为48学时,3学分,其中课堂教学为40学时,实验教学8学时,在第七学期完成。
三、课程的教学内容、重点和难点第零章绪论(4学时)基本内容:数字信号处理器的特点,DSP器件的发展,DSP器件的特点,DSP与其它微处理器的比较,DSP器件的应用领域,DSP应用系统设计,Mat1ab在DSP应用系统中的作用。
第一节数字信号处理器第二节专用DSP和DSP-IP核第三节通用DSP器件第四节小结基本要求:1. 了解数字信号处理器的特点2. 了解DSP器件的发展,DSP器件的特点;3. 了解DSP器件的应用领域,掌握DSP应用系统设计流程;4. 了解Uat1ab在DSP应用系统中的作用。
DSP原理与应用技术-考试知识点总结

DSP原理与应用技术-考试知识点总结第一章1、DSP系统的组成:由控制处理器、DSPs、输入/输出接口、存储器、数据传输网络构成。
P2图1-1-12、TMS320系列DSPs芯片的基本特点:XXX结构、流水线操作、专用的硬件乘法器、特殊的DSP指令、快速的指令周期。
3、XXX结构:是一种将程序指令储存和数据储存分开的储存器结构。
特点:并行结构体系,是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个相互独立的存储器,每个存储器独立编址,独立访问。
系统中设置了程序和数据两条总线,使数据吞吐率提高一倍。
4、TMS320系列在XXX结构之上DSPs芯片的改进:(1)允许数据存放在程序存储器中,并被算数运算指令直接使用,增强芯片灵活性(2)指令储存在高速缓冲器中,执行指令时,不需要再从存储器中读取指令,节约了一个指令周期的时间。
5、XXX结构:将指令、数据、地址存储在同一存储器中,统一编址,依靠指令计数器提供的地址来区分是指令、数据还是地址,取指令和去数据都访问同一存储器,数据吞吐率低。
6、流水线操作:TMS320F2812采用8级流水线,处理器可以并行处理2-8条指令,每条指令处于流水线的不同阶段。
解释:在4级流水线操作中。
取指令、指令译码、读操作数、执行操作可独立地处理,执行完全重叠。
在每个指令周期内,4条不同的指令都处于激活状态,每条指令处于不同的操作阶段。
7、定点DSPs芯片:定点格式工作的DSPs芯片。
浮点DSPs芯片:浮点格式工作的DSPs芯片。
(定点DSPs可以浮点运算,但是要用软件。
浮点DSPs 用硬件就可以)8、DSPs芯片的运算速度衡量标准:指令周期(执行一条指令所需时间)、MAC时间(一次乘法和加法的时间)、FFT执行时间(傅立叶运算时间)、MIPS(每秒执行百万条指令)、MOPS(每秒执行百万次操作)、MFLOPS (每秒执行百万次浮点操作)、BOPS(每秒十亿次操作)。
SPI协议串行外设接口协议的解析
SPI协议串行外设接口协议的解析SPI(Serial Peripheral Interface)协议是一种串行外设接口协议,常用于在微控制器和外部设备之间进行数据通信。
本文将对SPI协议的基本原理、通信格式以及常见应用进行解析。
一、SPI协议概述SPI协议是一种同步的全双工通信协议,其核心思想是通过使用四根线(片选信号、时钟、输入数据、输出数据)来实现设备之间的通信。
SPI可以同时支持单主机和多从机的通信方式,能够实现高速数据传输,并且相对简单易用。
二、SPI工作原理SPI工作在主-从模式下,一个主设备可以与一个或多个从设备进行通信。
SPI协议中的主设备控制时钟信号,指示数据传输的开始和结束,从设备根据时钟信号来读取或写入数据。
SPI通信时,主设备通过选择片选信号来选择要与其通信的从设备。
三、SPI通信格式1. 时钟极性(CPOL)和相位(CPHA):SPI通信协议的时钟极性和相位可以根据设备的要求进行设置,以适应不同设备的通信模式。
CPOL定义了在空闲状态下(时钟未激活)时钟信号的电平,高电平或低电平;CPHA定义了数据采样的时机,以时钟的上升沿还是下降沿为准。
2. 数据位顺序:SPI通信中数据传输的位顺序可以是LSB(Least Significant Bit,最低有效位)或MSB(Most Significant Bit,最高有效位)。
3. 传输速度:SPI通信的速度由主设备的时钟频率控制,可以根据从设备的要求和系统的稳定性来进行设置。
四、SPI应用场景SPI协议广泛应用于各种外设和传感器之间的通信,以下是几个常见的应用场景:1. 存储器芯片:SPI协议被广泛应用于存储器芯片(如Flash和EEPROM)和微控制器之间的通信,实现数据的读写操作。
2. 显示模块:很多液晶屏和OLED显示模块都采用SPI协议与主控制器进行通信,传输图像数据和命令。
3. 传感器:许多传感器(如温度传感器、加速度传感器等)通过SPI协议与控制器进行数据传输,实现实时数据采集和处理。
SPI总线协议介绍
SPI总线协议介绍1.SPI总线协议介绍串行外围设备(接口)(Serial Peripheral Interface,SPI)是一种高速、全双工、同步(通信)总线,常用于(单片机)和E2PROM、FLASH、(实时时钟)、(数字信号)(处理器)等器件之间的通信,它主要是主从方式通信,通常只有一个主机和多个从机。
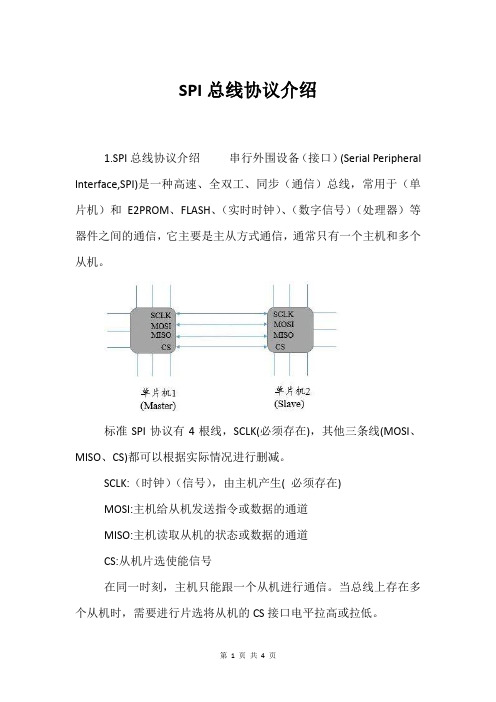
标准SPI协议有4根线,SCLK(必须存在),其他三条线(MOSI、MISO、CS)都可以根据实际情况进行删减。
SCLK:(时钟)(信号),由主机产生( 必须存在)MOSI:主机给从机发送指令或数据的通道MISO:主机读取从机的状态或数据的通道CS:从机片选使能信号在同一时刻,主机只能跟一个从机进行通信。
当总线上存在多个从机时,需要进行片选将从机的CS接口电平拉高或拉低。
2.SPI总线寻址模式SPI协议和(I2C)协议一样,数据是从高位到低位依次发送,SPI协议中SCLK在空闲时可以是高电平也可以是低电平。
下面以空闲时,SCLK为高电平举例。
当SCLK出现下降沿即从高电平跳到低电平时,进行数据输出;当SCLK出现上升沿即从低电平跳到高电平时,进行数据采样。
SPI总线寻址模式和I2C协议相比,SPI协议没有开始位、停止位、应答位,规则上简单很多。
SPI协议中SCLK在空闲时可以是高电平也可以是低电平,这其实反映了时钟的极性。
上图中,CPOL=1,CPHA=1 。
CPOL时钟极性:CPOL=0,SCLK空闲时状态为低电平CPOL=1,SCLK空闲时状态为高电平时钟的相位:它决定了什么时候进行数据输出,什么时候进行数据采样。
CPHA时钟相位:CPHA=0,每个周期的第一个跳变沿进行数据采样CPHA=1,每个周期的第一个跳变沿进行数据输出。
DSP课后思考题
第一章1. 什么是可编程DSP芯片?它有什么特点?答:可编程DSP芯片即通用数字信号处理器,其有完整的指令系统,可通过编程来实现各种数字信号处理功能,易于软件更新与系统升级。
主要特点有:(1)快速的指令周期,支持在一个指令周期内可完成一次乘法和一次加法运算;(2)采用改进的哈佛总线结构,可以同时完成获取指令和数据读取操作;(3)片内具有快速RAM,可通过独立的总线对多个存储器块并行访问;(4)硬件支持低开销或无开销的循环及跳转指令,使得FFT、卷积等运算速度大大提高;(5)快速的中断处理和硬件I/O支持,保证了实时响应能力;(6)专用寻址单元,具有在单周期内操作的多个硬件地址产生器;(7)采用流水线操作,使取指、译码、取操作数和执行指令等操作可以重叠执行;(8)片内集成了丰富的外设模块,简化了系统硬件设计。
2. 什么是定点DSP芯片和浮点DSP芯片?各有什么特点?答:定点DSP芯片:数据以定点格式工作的DSP芯片,DSP里面运算的数据的小数点位置是固定的。
主频高、速度快、成本低、功耗小,计算复杂度不高。
浮点DSP芯片:数据以浮点格式工作的DSP芯片,DSP里面运算的数据的小数点位置是浮动的。
处理速度比定点DSP低,成本和功耗比定点DSP高,其动态范围和处理精度远高于定点DSP芯片,运算复杂度高,精度要求高。
3. 简述TMS320C2000、TMS320C5000、TMS320C6000的特点和应用领域。
答:(1) TMS320C2000 系列面向控制应用领域进行了优化,基于32位处理器内核,主频300MHz,具有强大运算和控制功能,片内集成了丰富的控制外设模块,便于构成高效能的工业测控系统,片内集成了Flash存储器,简化了用户硬件电路;集成了异步串行通信接口,易于通过标准通信接口实现与计算机或其他微处理器间的远距离通信。
主要用于大存储设备管理、高效能的实时控制等场合,如电机驱动控制、大容量开关电源、医疗仪器等。
硬件学习之通信协议篇-SPI总线
一、概述SPI:Serial Peripheral Interface,串行外围设备接口。
是由摩托罗拉在20世纪80年代中期开发的同步串行总线接口规范(带有时钟信号,通过时钟极性和时钟相位来控制采样,即同步传输)。
1、支持半双工、全双工通信模式。
2、没有流控制和应答机制来确认是否接收到数据(UART有校验或流控制)。
3、没有一个固定的传输速率规定,已有器件SPI输出速率达到50Mbps以上(I2C有明确规定速率)。
4、只能板内的短距离传输(RS232、RS485输出距离远)。
5、没有限制传输bit数量,常用的是8bit或9bit。
6、不需要硬件地址(I2C要地址),采用片选。
7、主从模式,一托多。
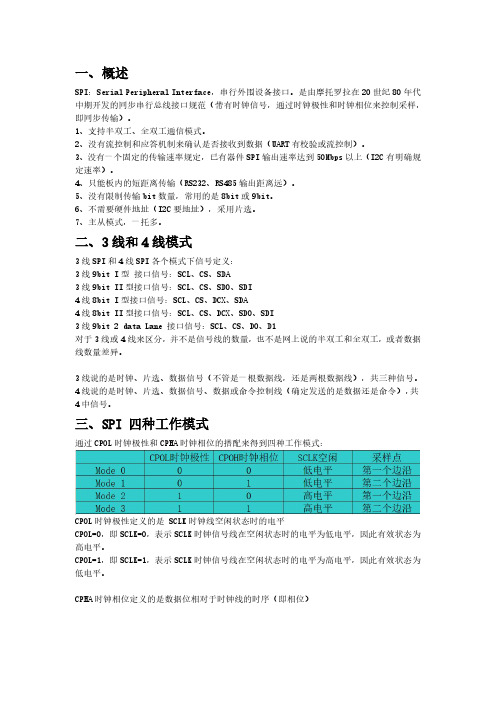
二、3线和4线模式3线SPI和4线SPI各个模式下信号定义:3线9bit I型接口信号:SCL、CS、SDA3线9bit II型接口信号:SCL、CS、SDO、SDI4线8bit I型接口信号:SCL、CS、DCX、SDA4线8bit II型接口信号:SCL、CS、DCX、SDO、SDI3线9bit2data Lane接口信号:SCL、CS、D0、D1对于3线或4线来区分,并不是信号线的数量,也不是网上说的半双工和全双工,或者数据线数量差异。
3线说的是时钟、片选、数据信号(不管是一根数据线,还是两根数据线),共三种信号。
4线说的是时钟、片选、数据信号、数据或命令控制线(确定发送的是数据还是命令),共4中信号。
三、SPI四种工作模式通过CPOL时钟极性和CPHA时钟相位的搭配来得到四种工作模式:CPOL时钟极性定义的是SCLK时钟线空闲状态时的电平CPOL=0,即SCLK=0,表示SCLK时钟信号线在空闲状态时的电平为低电平,因此有效状态为高电平。
CPOL=1,即SCLK=1,表示SCLK时钟信号线在空闲状态时的电平为高电平,因此有效状态为低电平。
CPHA时钟相位定义的是数据位相对于时钟线的时序(即相位)CPHA=0,即表示输出(out)端在上一个时钟周期的后沿改变数据,而输入(in)端在时钟周期的前沿(或不久之后)捕获数据。
SPI总线详细介绍
工作原理
双线和四线传输模式 双线SPI具有双I/O接口,与标准串行闪存设备相比,其传输速率可提高一倍。 MISO和MOSI数据引脚以半双工模式运行,每个时钟周期发送两个位。MOSI线变 为IO0,而MISO线变为IO1。 四线SPI与双线SPI类似,但吞吐量提高了四倍。添加了两条额外的数据线,每个 时钟周期传输4位,数据线为IO0、IO1、IO2和IO3。
菊花链级联方式走线的长度和走线的数量上相较与并联的级联方式有较明显的优势,但是该 种级联方式也限制了SPI总线对单个从机设备的读写操作。可以把每个从机看做移位寄存 器,在移位脉冲(SCLK)的作用下,串行数据从主机MOSI 输出,经由从机 SDI 管脚移入从机 DCP0,然后由 DCP0 的 SDO 管脚,移入 DPC1 的内部寄存器。
电路设计
layout注意事项
1.串阻靠近发射端放置,如RQA6RQA10靠近PCH;RQA5靠近FLASH 2.信号上过孔允许最大数量7个,一般 走不到这么多
3.数据和时钟的走线长度差要求在
500mil以内。
备注:双负载和三负载的情况,在信号线的
4.数据线距5mil以上,时钟和其它 两端加串阻,阻值大小默认参考Design
工作原理
传输模式 标准传输模式 根据时钟极性(CPOL)及相位(CPHA)不同可以组合成4种工作模式:SPI0, SPI1,SPI2,SPI3;其中使用的最为广泛的是SPI0和SPI3方式(实线表示)
Mode CPOL
0
0
1
0
2
1
3
1
CPHA 0 1 0 1
极性和相位
工作原理
工作原理
0和3这两种模式的相同的地方是都在时钟上升沿采样传输数据,区别这两种方 式的简单方法就是看空闲时,时钟的电平状态,低电平为mode 0 ,高电平为 mode 3。
串行外设接(SPI-Serial Peripheral Interface)是近年来新发
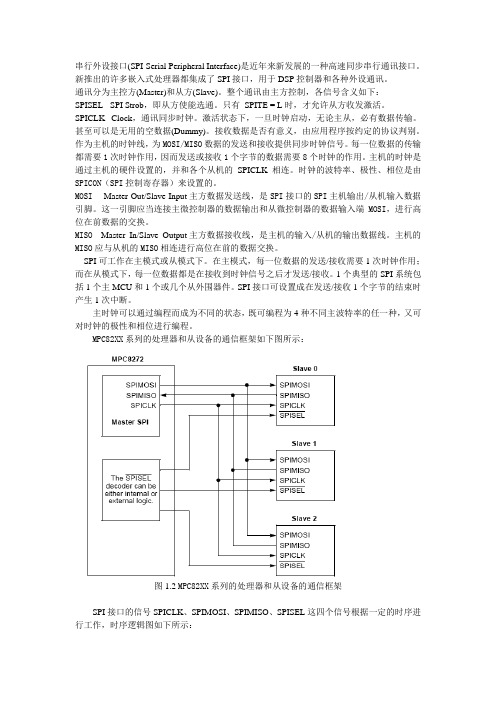
串行外设接口(SPI-Serial Peripheral Interface)是近年来新发展的一种高速同步串行通讯接口。
新推出的许多嵌入式处理器都集成了SPI接口,用于DSP控制器和各种外设通讯。
通讯分为主控方(Master)和从方(Slave)。
整个通讯由主方控制,各信号含义如下:SPISEL - SPI Strob,即从方使能选通。
只有SPITE = L时,才允许从方收发激活。
SPICLK- Clock,通讯同步时钟。
激活状态下,一旦时钟启动,无论主从,必有数据传输。
甚至可以是无用的空数据(Dummy)。
接收数据是否有意义,由应用程序按约定的协议判别。
作为主机的时钟线,为MOSI/MISO数据的发送和接收提供同步时钟信号。
每一位数据的传输都需要1次时钟作用,因而发送或接收1个字节的数据需要8个时钟的作用。
主机的时钟是通过主机的硬件设置的,并和各个从机的SPICLK相连。
时钟的波特率、极性、相位是由SPICON(SPI控制寄存器)来设置的。
MOSI--- Master Out/Slave Input主方数据发送线,是SPI接口的SPI主机输出/从机输入数据引脚。
这一引脚应当连接主微控制器的数据输出和从微控制器的数据输入端MOSI,进行高位在前数据的交换。
MISO---Master In/Slave Output主方数据接收线,是主机的输入/从机的输出数据线。
主机的MISO应与从机的MISO相连进行高位在前的数据交换。
SPI可工作在主模式或从模式下。
在主模式,每一位数据的发送/接收需要1次时钟作用;而在从模式下,每一位数据都是在接收到时钟信号之后才发送/接收。
1个典型的SPI系统包括1个主MCU和1个或几个从外围器件。
SPI接口可设置成在发送/接收1个字节的结束时产生1次中断。
主时钟可以通过编程而成为不同的状态,既可编程为4种不同主波特率的任一种,又可对时钟的极性和相位进行编程。
MPC82XX系列的处理器和从设备的通信框架如下图所示:图1.2 MPC82XX系列的处理器和从设备的通信框架SPI接口的信号SPICLK、SPIMOSI、SPIMISO、SPISEL这四个信号根据一定的时序进行工作,时序逻辑图如下所示:图1.3 SPI接口时序图当主处理器的CI比特为设置为0时,在时钟SPICLK的上升沿对数据进行采样;当主处理器的CI比特为设置为1时,在时钟SPICLK的下降沿对数据进行采样。
DSP原理及应用(2812)试卷_附答案卷C1(2014城南)
………………………………………………………………………………………………………试卷编号C1 拟题教研室(或教师)签名教研室主任签名………………………………………………………………………………………………………长沙理工大学考试试卷………………………………………………………………………………………………………课程名称(含档次)DSP原理及应用课程代号D810000205专业电子信息工程层次(本部、城南) 城南考试方式(开、闭卷)闭卷一、选择题(本题总分 40 分,每题 2 分)1、对于TI公司的TMS320F281X系列DSP芯片,下列说法正确的是( B )A、定点16位DSPB、定点32位DSPC、浮点16位DSPD、浮点32位DSP2、TMS320F281X型DSP处理器合适的内核供电电压( C )伏。
A、5VB、3.3VC、1.8VD、1.2V3、TMS320F281X系列DSP处理器有( D )个数字通用I/O引脚。
A、16B、32C、56D、964、交叉编译后,在目标硬件(实验箱)上加载、调试、执行的执行文件用( C )扩展名表示。
A、.objB、.cmdC、.outD、.asm5、TMS320F281X DSP中,乘法器的位数为: ( B )A、16位B、32位C、40位D、17位6、TMS320F281X DSP的流水线是由( C )级(也即是由多少个操作阶段)组成。
A、 4B、 6C、 8D、 107、下列DSP哪种更适合用于处理百万像素级的彩色图像( D )。
A、F281XB、C54XXC、C55XXD、 D、C67XX8、TMS320C667x DSP是TI公司生产的高端DSP,其运算速度可达( A )A、256 GMACB、160 GMACC、80 GMACD、40 GMAC9、做DSP定时器例程实验中,程序运行在( D )A、片内FLASHB、片内RAMC、片外FLASHD、片外RAM10、TI的DSP编程采用段的概念,其中( C )代表已初始化数据段A、.textB、.bssC、.dataD、.stack11、F2812的一个事件管理器最多能产生( C )路PWM波。
SPI接口——精选推荐
SPI接⼝串⾏外设接⼝(Serial Peripheral Interface)是⼀种同步外设接⼝,它可以使单⽚机与各种外围设备以串⾏⽅式进⾏通信以交换信息。
SPI最早是Motorola公司提出的全双⼯三线同步串⾏外围接⼝,采⽤主从模式(Master—Slave)架构,⽀持⼀个或多个Slave设备,由于其简单实⽤、性能优异,因此许多⼚家的设备都⽀持该接⼝,⼴泛应⽤于单⽚机和外设模块之间的连接。
SPI接⼝只需4条线:串⾏时钟线(SCK)、主机输⼊/从机输出数据线(MISO)、主机输出/从机输⼈数据线(MOSI)和低电平有效的从机选择线(SS)。
(1)MISO:主设备输⼊/从设备输出引脚。
该引脚在从模式下发送数据,在主模式下接收数据。
(2)MOSI:主设备输出/从设备输⼊引脚。
该引脚在主模式下发送数据,在从模式下接收数据。
(3)SCK:串⼝时钟,作为主设备的输出,从设备的输⼊。
(4)SS:从设备选择。
这是⼀个可选的引脚,⽤来选择主/从设备。
它的功能是⽤来作为⽚选引脚,让主设备可以单独地与特定从设备通信,避免数据线上的冲突。
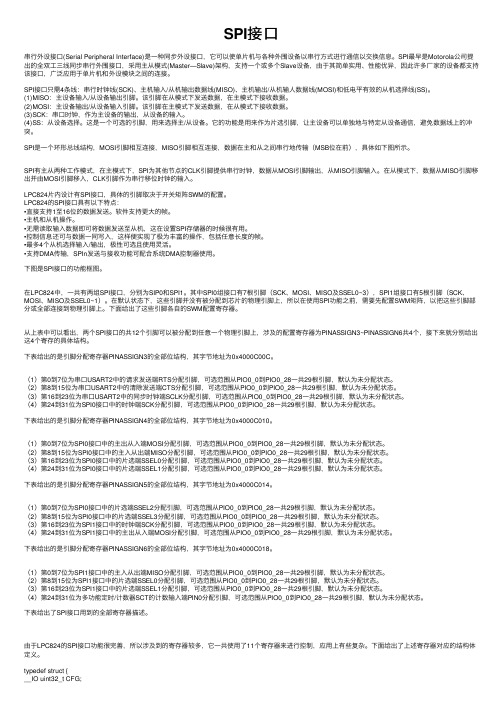
SPI是⼀个环形总线结构,MOSI引脚相互连接,MISO引脚相互连接,数据在主和从之间串⾏地传输(MSB位在前),具体如下图所⽰。
SPI有主从两种⼯作模式,在主模式下,SPI为其他节点的CLK引脚提供串⾏时钟,数据从MOSI引脚输出,从MISO引脚输⼊。
在从模式下,数据从MISO引脚移出并由MOSI引脚移⼊,CLK引脚作为串⾏移位时钟的输⼊。
LPC824⽚内设计有SPI接⼝,具体的引脚取决于开关矩阵SWM的配置。
LPC824的SPI接⼝具有以下特点:•直接⽀持1⾄16位的数据发送。
软件⽀持更⼤的帧。
•主机和从机操作。
•⽆需读取输⼊数据即可将数据发送⾄从机,这在设置SPI存储器的时候很有⽤。
•控制信息还可与数据⼀同写⼊,这样便实现了极为丰富的操作,包括任意长度的帧。
•最多4个从机选择输⼊/输出,极性可选且使⽤灵活。
spi通信协议

spi通信协议SPI(Serial Peripheral Interface)串行外设接口是一种同步的、全双工的通信协议,常用于单片机和外部设备之间的通信。
SPI协议定义了一种主从模式的通信方式,其中一个设备充当主设备,负责发起通信,而其他设备则充当从设备,负责接收和处理通信数据。
SPI通信协议由四根线组成:时钟线(CLK)、片选线(SS)、主设备发出数据(MOSI)和主设备接收数据(MISO)。
在SPI通信中,主设备通过时钟线提供时钟脉冲,通过片选线选择和控制不同的从设备。
在通信开始时,主设备将片选线拉低,选择需要通信的从设备。
然后,主设备在每个时钟脉冲中,通过MOSI线发送数据给从设备,同时从设备通过MISO线将数据发送回主设备。
SPI通信协议的通信方式为全双工,即主设备和从设备可以同时发送和接收数据。
在通信过程中,主设备和从设备通过时钟的同步来保持数据的一致性。
主设备在上升沿将数据发送到MOSI线上,而从设备在下降沿将数据从MISO线上读取。
通过时钟的同步,主从设备可以准确地发送和接收数据。
在SPI通信中,数据的传输是串行的,即每个数据位都按顺序传输。
通信的起始位和终止位可以由主设备和从设备约定。
通常情况下,通信的起始位由主设备发起,并在时钟上升沿进行传输。
终止位可以由主设备或从设备发起,并在时钟下降沿进行传输。
SPI通信协议的速度可以通过调整时钟频率来控制。
时钟频率越高,数据传输的速度越快。
然而,时钟频率的增加也会增加信号的噪声和功耗。
因此,在选择时钟频率时,需要权衡速度和可靠性的要求。
SPI通信协议还支持多个从设备的通信。
每个从设备都有一个独立的片选线,主设备可以通过选择不同的片选线来与不同的从设备进行通信。
这种多从设备的通信方式使SPI协议更加灵活,可以同时与多个外部设备进行数据交换。
综上所述,SPI通信协议是一种常用的串行通信协议,使用主从模式进行数据交换。
它具有简单、可靠、高速的特点,适用于单片机和外部设备之间的通信。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
第10章 串行外设接口SPI
主控制器控制SPICLK信号,通过发出SPICLK信号 启动数据发送,从控制器则通过检测SPICLK信号 接收数据。 一个主控制器可以连接多个从控制器,但是一次 只允许一个从控制器给主控制器发送数据
11
第10章 串行外设接口SPI 10.4 串行外设接口中断
有五个控制位用于初始化串行外设接口的中断: SPI中断使能位:SPI INT ENA (SPICTL.0); SPI中断标志位:SPI INT FLAG(SPISTS.6); SPI超限中断使能位:OVERRUN INT ENA(SPICTL.4); SPI接收器超限中断标志位:RECEIVER OVERRUN FLAG(SPISTS.7) SPI中断优先级选择位:SPI PRIORITY(SPIPRI.6)。
3
第10章 串行外设接口SPI
10.1 串行外设接口概述 (1)4个外部引脚,以下引脚都可用作数字I/O引 脚。 SPISIMO-SPI从输入、主输出 SPISOMI-SPI主输入、从输出 SPICLK -SPI时钟 SPISTE-SPI从发送使能 (2)主/从操作模式。 (3)发送、接收双缓冲。
(1)下降沿,无延时:SPI在时钟下降沿发送数据,在 时钟的上升沿接收数据; (2)下降沿,有延时:SPI在时钟下降沿前半个周期发 送数据,在时钟的下降沿接收数据; (3)上升沿,无延时:SPI在时钟上升沿发送数据,在 下降沿接收数据; (4)上升沿,有延时:SPI在时钟上升沿前半个周期发 送数据,在上升沿接收数据。 4种时钟模式如图所示。
26
第10章 串行外设接口SPI 串行接口命令及功能描述。
27
第10章 串行外设接口SPI
MAX5121的工作时序 MAX512I在工作时,首先将CS置为低电平以使能 MAX5121,然后从SCLK的上升沿开始将DIN上的串 行数据一位接一位移入MAX5121内部的16bit串行移 位寄存器。当CS为高电平后,串行移位寄存器中的数 据将被装入MAX5121内部的输入寄存器或送入DAC 寄存器,具体取决于16位串行字中C2、C1、C0这三 位的取值。MAX5121的最高串行工作时钟频率为 6.6MHz。
DSP原理与应用
第10章 串行外设接口SPI SPI:
高速同步串行输入/输出端口,传送速率可编程
应用: 外部移位寄存器、D/A、 A/D、串行EEPROM、LED 显示驱动器等外部设备进行扩展。
2
第10章 串行外设接口SPI
10.1 串行外设接口概述 10.2 串行外设接口控制寄存器 10.3 SPI操作 10.4 串行外设接口中断 10.5 数据格式 10.6 SPI波特率和时钟模式 10.7 SPI的复位和初始化 10.8 SPI应用实例
13
第10章 串行外设接口SPI
10.6 SPI波特率和时钟模式 SPI模块支持125种不同的波特率和4种不同的时钟模 式。SPI最大波特率为CLKOUT频率的四分之一。 10.6.1 SPI波特率的确定 SPI波特率取决于CLKOUT和SPIBRR的值。 (1)对于SPIBRR=3-127 SPI波特率=CLKOUT/(SPIBRR+1) (2) 对于SPIBRR=0-2 SPI波特率=CLKOUT/4 SPI最大波特率=CLKOUT/4=10MHz
8
第10章 串行外设接口SPI
(2)从模式 将 Slave的数据传送给 Master,数据传送完毕, 申请中断。
SPIMISO SPISTE SPICLK 时钟
SPIMISO SPISTE SPICLK
9
第10章 串行外设接口SPI
由图知,SPI有两种工作模式:主模式和从模式, 操作模式由SPICTL.2(MASTER/SLAVE位)决定。 数据的发送方式有三种: (1)主控制器发送数据,从控制器发送伪数据; (2)主控制器发送数据,从控制器发送数据; (3)主控制器发送伪数据,从控制器发送数据。
28
第10章 串行外设接口SPI
29
第10章 串行外设接口SPI
MAX512l与TMS320LF2407的硬件接口 在设计TMS320LF2407与MAX5121的硬件接口电路 时,可将TMS320LF2407作为SPI主机,MAX512l作为 从机。MAX5121只接受来自主机的数据,然后进行D /A转换并从OUT引脚输出模拟电压。由于 MAX5121是在SCLK的上升沿接收SPI线上的数据, 因此,DSP应采用无延时的下降沿来发送SPI数据,这 样才能配合MAX5121的工作时序。
19
第10章 串行外设接口SPI
MAX5121内部带有一个+1.25V基准参考电压源,如用户 需要,也可外接片外参考电压。此外,它内部还包括一 个16位的串行移位寄存器、一个输入寄存器、一个 DAC寄存器和一个输出放大器。其输出电压的计算公 式为:
式中,VREF是基准电压,Code是在0x000~0xFFF范围 内的输入数字量,VOS为片外输入模拟电压。
14
第10章 串行外设接口SPI 10.6.2 SPI时钟模式
SPI有四种时钟模式,由CLOCK POLARITY 和 CLOCK PHASE位控制。 CLOCK POLARITY位:选择时钟的有效沿是上升沿还是 下降沿; CLOCK PHASE位:选择是否有半个时钟周期的延时。
15
第10章 串行外设接口SPI
32
第10章 串行外设接口SPI
33
第10章 串行外设接口SPI
源程序代码: (1)所需的复位和中断向量定义文件“vectors.asm” // 该文件利用汇编语言代码定义了复位和中断向量 .title "vectors.asm" .ref _c_int0,_nothing .sect ".vectors" reset: b _c_int0 int1: b _nothing int2: b _nothing int3: b _nothing int4: b _nothing int5: b _nothing int6: b _nothing
34
第10章 串行外设接口SPI
(2)主程序 //该程序利用LF2407的SPI模块向MAX5121芯片发送数据用于D/A转换, MAX5121的模拟输出端输出一个三角波 。用C语言编写 #include "register.h" int GPR3; int flag1; int flag; int initial() //系统初始化子程序 { asm(" setc INTM"); //屏蔽中断 WSGR=0X00; //禁止所有的等待状态 asm(" CLRC SXM"); asm(" CLRC OVM"); asm(" CLRC CNF"); //B0被配置为数据空间 *SCSR1=0X81FE; //CLKIN=6M, CLKOUT=24M ,并且使能到SPI模块的时钟 *WDCR=0X0E8; //不使能看门狗 } 35
30
第10章 串行外设接口SPI
TMS320LF2407与MAX512l的硬件接口电路。
31
第10章 串行外设接口SPI SPI总线波特率的设置
由于不同SPI器件的最高工作频率有所不同,为了使 SPI总线高效工作,应了解各个SPI器件最高能接受的 频率,然后取低频率的SPI器件的最高频率作为通讯 波特率。由于MAX5121的最高允许时钟频率为6.6 MHz,因此,在TMS320LF2407与MAX512l的应用系统设 计中,SPI总线的最高时钟频率不能超过6.6 MHz。
16
第10章 串行外设接口SPI
SPICLK 周期数 SPICLK (无延时的上升 沿) SPICLK (有延时的上 升沿) SPICLK (无延时的下 降沿) SPICLK (有延时的下 降沿) SPISIMO/ SPISOMI SPISTE 进入从方式 接收 锁存点 17
第10章 串行外设接口SPI
21
第10章 串行外设接口SPI
MAX5121的内部结构框图如图所示。
22
第10章 串行外设接口SPI
芯片的引脚功能说明。
23
第10章 串行外设接口SPI
24
第10章 串行外设接口SPI
25
第10章 串行外设接口SPI
MAX512l的串行接口命令。MAX512l的编程控制由16 位串行字组成,即3位控制位、12位数据位和1位子 位。。
20
第10章 串行外设接口SPI
MAX5121数模转换器具有两种工作模式,即正常工作 模式(电流500μA)和关断工作模式(电流3μA)。当 处于关断工作模式时,OUT输出变为高阻态,但输入寄 存器内容将被保存,以便MAX5121被唤醒后能“回忆” 起进入关断模式前的输出状态。 MAX512l采用+3V单电源供电,封装为16pin QSOP封装 形式。
12
第10章 串行外设接口SPI
10.5 数据格式 LSB 移位寄存器SPIDAT MSB
SPI通信时,要发送的数据从SPIDAT寄存器的MSB依 次移出,接收的数据则从SPIDAT的LSB依次移入。 SPI数据字符位数(1-16位)由SPICCR.3-0指定。 当写入SPIDAT或SPITXBUF时,数据必须是左对齐 的。 数据从SPIRXBUF读回时是右对齐的。