基于CRUISE的纯电动环卫车底盘动力参数匹配与仿真
基于Cruise 电动车整车性能参数匹配及仿真分析

基于Cruise 电动车整车性能参数匹配及仿真分析冯红晶【摘要】The power matching of the electric motor,battery and transmission ratio is designed according to the vehicle parameters and the vehicle performance indicators.The vehicle simulation model,the electric motor and the battery model were built for analyzing the power performance and the economy performance based on the Cruise simulation software.Results show that the maximum velocity,the acceleration time of the 0-75m and the 0-80km/h,and the driving range act well with the design stly,real vehicle test about the power performance and the economy performance were carried out on the car and the results were basically consistent with the simulation results.This further demonstrated the validity of the power system design based on Cruise simulation software.%根据整车参数和整车性能指标对电动车的电机、电池以及传动比进行动力匹配设计,利用Cruise仿真软件建立整车模型、电机以及电池模型,对其动力性和经济性进行仿真分析.由仿真结果可知,最高车速、0~75 m加速时间、0~ 80 km/h加速时间以及续驶里程均符合初步设计要求.对电动车的动力性及经济性进行道路试验,对比道路试验与仿真分析的结果,发现道路试验所测数据与仿真结果基本符合,验证了基于Cruise的整车性能参数匹配的合理性和所建模型的准确性.【期刊名称】《西华大学学报(自然科学版)》【年(卷),期】2017(036)003【总页数】7页(P16-22)【关键词】电动车;动力匹配;整车模型;仿真分析;动力性;经济性;道路试验【作者】冯红晶【作者单位】北京新能源汽车股份有限公司,北京102606【正文语种】中文【中图分类】U462.3+1;U462.3+4电动汽车(EV)是21世纪清洁、高效和可持续发展的交通工具,是一种电力驱动的道路交通工具。
基于CRUISE的电动汽车的建模与仿真.doc

基于CRUISE的电动汽车的建模与仿真摘要:动力性与经济性是电动汽车的重要评价指标,本文根据某一款纯电动汽车的基本技术参数和设计要求,先基于理论设计对该车型进行电机和电池的参数匹配,再利用CRUISE软件搭建整车模型,对整车进行动力性与经济性仿真分析。
通过结果分析,证明理论设计参数满足设计要求,验证该方法的可行性,为纯电动汽车进一步设计研究提供理论依据。
0引言电动汽车以电能这一清洁能源为动力来源,零排放,零污染,是汽车行业未来的发展方向。
动力性和经济性是汽车重要的性能指标,合理良好的整车参数匹配方法不仅可以满足车辆的动力性要求,而且可以提高车辆续驶历程,提升车辆经济性能。
使用专业软件CRUISE对汽车进行建模仿真,可以缩短整车开发周期,降低开发成本。
本文以某一款纯电动汽车开发为例,根据纯电动汽车理论设计原理,对整车参数进行匹配计算,并采用CRUISE软件搭建整车模型,对整车动力性、经济性进行仿真研究。
1 参数匹配计算纯电动汽车动力系统参数匹配的主要任务是完成动力系统部件的选型和参数确定,即确定电机、电池以及变速器的型式及其关键特征参数。
本文选取某电动汽车为研究对象,整车参数如表1所示。
根据设计要求,本课题设计的纯电动汽车动力性指标如表2所示: 1.1电机参数匹配驱动电机是纯电动汽车唯一的动力来源,是决定整车动力性与经济性的关键因素之一。
选择一台电动汽车的驱动电机,需要匹配的参数主要有电机的额定功率、最大功率、额定转速、最高转速等。
1.1.1确定电机额定功率与最大功率电机功率通常由电动汽车的最高车速u()、最大爬坡度和加速时间t这三个动力性能指标决定。
最高车速确定最大功率计算最高车速时,忽略坡度阻力,车辆主要受到滚动阻力和风阻的影响,最大需求功率为式中:为传动系效率(本文取0.9);为滚动阻力系数;为空气阻力系数;为迎风面积;为最高车速。
汽车以某一速度爬上一定坡度时,最大需求功率为式中。
车辆加速过程中,忽略坡路阻力,所受到的阻力主要包括滚阻、风阻以及加速阻力,加速后期所需功率最大,最大需求功率为式中:为经过加速后汽车速度,为加速时间,为旋转质量换算系数。
基于AVL CRUISE软件的纯电动汽车动力系统设计

3.I仿 真 项 目 根据 GB/I"l8385—2005(电动汽车动 力性能试 验方法 )和 GB T 18386—2005(电动汽车能量消耗率 和续驶里程试验方 法 )相关规定进行 仿真模型的设置 ,对下述项 目依次进行仿真 。
(1)0-100km/h加速时 间 (s)
(2)最大爬坡度 (% ) (3)最高车速 (km/h) (4)NEDC工 况 续 驶 里 程 (km ) (5)NEDC工况 每百公 里电耗 ,kWh/100km (6)NEDC工 况每百公里电耗,kWh/lOOkm (考虑制动能量回收 )
出初步结果 ,然后仿真 NEDC驾驶循环需求功率 。
100
NEDC循 环 电机 功 率
…
一
80- …
———— —— —————— …
≥兰
60…
一一 …Biblioteka …一 姗 雷 柏…
一一 … …
一 —
—
—
—
——
——
—
—
—
—
——
——
L
毒 2 2o o— 一J 一一点 一# 一 二一 f :
计算以及零部件选型提供一个指导。
一
.
÷
一 一 ,
【关键词 】电动汽车 动力 系统 汽车设计 仿真设计 AVL-CRUISES软件 中图分类号:U469.72文献标识码:B 文章编号 :1009.4067(2014)11-90.01
一
一
_ l_
_l_
r
一
十 _
一 、 初步仿真设计 根据汽车设计的输入需求 ,作为输入条件 ,根 据汽车理论进 行计算
/
7
CRUISE纯电动车动力性能仿真及优化

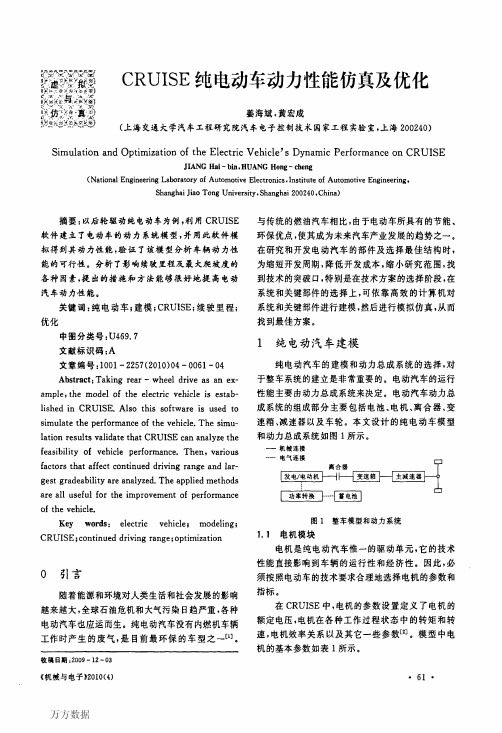
虚 拟与仿 真CRU ISE 纯电动车动力性能仿真及优化姜海斌,黄宏成(上海交通大学汽车工程研究院汽车电子控制技术国家工程实验室,上海200240)Simulation and Optimization of the Electric Vehicle s Dynamic Perf ormance on CRUISEJIANG Hai bin,HUANG Hong cheng(N ational Eng ineer ing L abor ator y of Automo tiv e Elect ronics,I nstitute o f Automo tiv e Eng ineer ing,Shang hai Jiao T ong U niv ersity ,Shang hai 200240,China)摘要:以后轮驱动纯电动车为例,利用CRU ISE 软件建立了电动车的动力系统模型,并用此软件模拟得到其动力性能,验证了该模型分析车辆动力性能的可行性.分析了影响续驶里程及最大爬坡度的各种因素,提出的措施和方法能够很好地提高电动汽车动力性能.关键词:纯电动车;建模;CRUISE;续驶里程;优化中图分类号:U 469.7文献标识码:A 文章编号:10012257(2010)04006104收稿日期:20091203Abstract:T aking r earw heel dr iv e as an ex -am ple,the mo del of the electric vehicle is estab -lished in CRUISE.Also this softw are is used to simulate the perfo rmance of the vehicle.T he simu -lation results validate that CRU ISE can analyze the feasibility of vehicle per for mance.Then,various facto rs that affect continued driving range and lar -g est gr adeability ar e analyzed.The applied methods ar e all useful for the improvement of perform anceof the vehicle.Keywords:electricvehicle;m odeling;CRUISE;co ntinued driving rang e;optimization0 引言随着能源和环境对人类生活和社会发展的影响越来越大,全球石油危机和大气污染日趋严重,各种电动汽车也应运而生.纯电动汽车没有内燃机车辆工作时产生的废气,是目前最环保的车型之一[1].与传统的燃油汽车相比,由于电动车所具有的节能、环保优点,使其成为未来汽车产业发展的趋势之一.在研究和开发电动汽车的部件及选择最佳结构时,为缩短开发周期,降低开发成本,缩小研究范围,找到技术的突破口,特别是在技术方案的选择阶段,在系统和关键部件的选择上,可依靠高效的计算机对系统和关键部件进行建模,然后进行模拟仿真,从而找到最佳方案.1 纯电动汽车建模纯电动汽车的建模和动力总成系统的选择,对于整车系统的建立是非常重要的.电动汽车的运行性能主要由动力总成系统来决定.电动汽车动力总成系统的组成部分主要包括电池、电机、离合器、变速箱、减速器以及车轮.本文设计的纯电动车模型和动力总成系统如图1所示.图1 整车模型和动力系统1.1 电机模块电机是纯电动汽车惟一的驱动单元,它的技术性能直接影响到车辆的运行性和经济性.因此,必须按照电动车的技术要求合理地选择电机的参数和指标.在CRU ISE 中,电机的参数设置定义了电机的额定电压,电机在各种工作过程状态中的转矩和转速,电机效率关系以及其它一些参数[2].模型中电机的基本参数如表1所示.表1 电机的基本参数额定转速(r/m in)1430峰值转速(r/m in)5600额定转矩(N m)20峰值转矩(N m)40额定功率(kW)3峰值功率(kW)6额定电压(V)481.2 电池模块电池是制约电动汽车发展的关键因素,目前可采用的电池有铅酸电池、镍镉电池、镍氢电池、锂电池和燃料电池等.铅酸电池虽然比能量比较低,但其技术可靠,生产工艺成熟,成本低,拥有适合电动汽车使用的良好的大电流输出性能以及多种型号和尺寸.考虑到整车的成本,本车型选用了铅酸电池作为动力源.在CRU ISE中,根据电池建模的参数做出电池的SOC与电池电压之间的关系曲线,SOC 值的大小直接反映了电池所处的状态,由此可限定电池的最大放电电流,并可在仿真过程中更精确地计算各种工况下电动车的续驶里程.所选用的电池在试验室经过不同状态下的充放电试验,根据在试验中测得电池电压、电流和放电时间等参数,推断出SOC与电压的关系.2 CRU ISE中建模与仿真CRUISE软件可以用于车辆的动力性,燃油经济性以及排放性能的仿真,其模块化的建模理念使得用户可以便捷地搭建不同布置结构的车辆模型,其复杂完善的求解器可以确保计算的速度.它可用于汽车开发过程中的动力和传动系统的匹配、汽车性能预测和整车仿真计算;可以进行发动机、变速器、轮胎的选型及其与车辆的匹配优化;可以用于混合动力汽车、纯电动汽车的动力、传动及控制系统的开发和优化[3].CRUISE软件的主要特点是:a.模块化的设计思想使得用户能够便捷地进行车辆的整车模型和动力总成系统的建模,并且能够方便地进行修改和优化.b.智能化的驾驶员模块,能够很好的模拟驾驶员的意图.c.M atlab接口模块,使得用户能够使用比较复杂的控制算法.2.1 CRUISE中车辆模型按照上述结构,在CRUISE中进行建模. CRU ISE采用图形化的界面,用户可以从已有的模型箱中选择自己想要的模型.将电池、电机、离合器、变速箱、驾驶员模块以及车轮等模块拖入CRUISE 的工作区中,建立模型.输入系统中各个模块的参数,如车辆模块的满载重量、迎风面积和阻力系数等;电机的电压、转矩和转速等;车轮的摩擦系数;主减速器的主减速比等.在CRUISE仿真时,系统会提示所有必须要输入的参数,按照这个要求,把参数一一输入即可.建立系统的物理连接和信号连接.首先完成物理连接,当各子系统模型选定之后,应根据汽车配置方案和部件连接关系建立模型的物理连接.只需用connect连接功能建立物理连接.传动系各部件之间有直接的物理连接关系,车轮和制动器之间也有物理连接关系,但驾驶室与动力传动系和制动系之间没有物理连接.在仿真过程中,它们之间是通过信号连接来传递信息.信号连接是汽车建模过程中比较关键内容之一,也有较大难度.要想正确建立汽车各子模型之间的信号连接关系,必须对汽车系统内部各部件之间的连接、控制关系以及信息传递关系,有比较深刻的理解.如驾驶员模块需要连接来自电机的转速信号,变速箱的档位信号等;制动器需要连接制动压力信号;摩擦离合器需要来自驾驶员期望的结合程度[4].系统需要把所需的信号连接全部定义准确,如果有一个错误,那么将无法运行仿真程序.2.2 仿真及结果分析根据纯电动汽车仿真的要求,选择和编辑相应的任务及工况,设置合适的仿真步长和精度进行仿真计算.设定的计算任务有:在任务Cycle Run中仿真续驶里程;在任务Climbing Per for mance中仿真最大爬坡度;在任务Constant Dr iv e中仿真最高速度.运行CRUISE,得到仿真结果如下所述.a.续驶里程.建立一个25km/h匀速行驶工况,通过对电池SOC的变化对应的时间来得到纯电动车的续驶里程所需要的电量值.运行这个任务,得到纯电动车的SOC变化图.考虑到电池的输出效率为85%,得到当电动汽车以25km/h行驶100km 后,电池所消耗的电量约为130.6A h,行驶120km所消耗的电量为156.8A h.和理论所求得结果一致.b.爬坡性能.根据CRUISE软件result的报告,可以得到最大爬坡度和最高速度确切值.爬坡表现:档位,1;最大爬坡度,15.43%;车速,5.00km/ h;电机转速,602.86r/min;速度率,0.00.最大车速理论值,51.41km/h;实际值,43.71km/h.从仿真结果可以看出,根据目前车辆的参数,当电池的容量为160A h时,在25km/h的匀速运行工况下,电动汽车的续驶里程约为120km.电动汽车的最大爬坡度为16.05%,最高速度为43.71 km/h.与通过汽车理论计算得到以及车辆所要求的性能参数基本一致.这证明了利用CRU ISE软件对车辆整车性能仿真和分析是可行的.3 整车性能影响因素分析3.1 续驶里程设f为滚动阻力系数;r为轮胎滚动半径;m为汽车总质量;i g为传动系速比;C D为迎风阻力系数; t为传动系效率;A为迎风面积;Q为电池的额定容量;U E为电池的端电压; 为电机效率.则汽车以速度v等速行驶时所需的电机输出扭矩M和功率P 分别为:M=(f m+C D A v2/21.15)ri g t(1)P=(f m+C D Av2/21.15)(v/3.6)ri g t(2)电池携带的额定总能量为:W0=QU E(3)理想状态下等速行驶的续驶里程s为:s=W0vP/=QU E vP(4)从式(4)可以看出,在整车携带的电池总量和电池比能量不变的条件下,续驶里程指标与行驶阻力功率P有关[5].而行驶阻力功率又与滚动阻力系数f,迎风阻力系数C D,整车总质量m,迎风面积A,车速v,传动系效率 t,车轮半径r和传动系速比i g 有关.以电动车参数(总质量m=1100kg;f= 0 012;A=3m2;C D=0.45; t=0.9;r=0.26m)为例作分析.a.不同等速v对续驶里程的影响.在不同速度的匀速状态下运行,车辆的续驶里程是不同的[6].设置电池的电量为160A h(为确保安全,视电量剩20%时一次运行结束),不同匀速行驶状态对车辆的续驶里程的影响,如图2所示.图2 不同匀速行驶状态下车辆续驶里程的影响从图2中可以看到,各种不同的匀速行驶中,以速度接近零行驶时,车体所消耗的能量最小,对于拥有固定能量的系统来讲,其续驶里程也最长.因此,若想增加续驶里程,应尽可能以低速行驶.b.整车参数对续驶里程的影响.图3,图4和图5分别表示在匀速25km/h行驶下,迎风阻力系数C D,滚动阻力系数f和整车总质量m对一次充图3 迎风阻力系数对续驶里程的影响图4轮胎滚动阻力系数对续驶里程的影响图5 整车总质量对续驶里程的影响电续驶里程的影响.可见携带能源极为有限的电动汽车对降低滚动阻力系数、迎风阻力系数和整车总质量的要求非常迫切.c.电池参数对续驶里程的影响.由式(4)可知,电动汽车携带的电池总量以及电池的端电压的大小都会影响续驶里程,并且它们与续驶里程成正比.可见提高电池的最大容量及电池端电压,对提高电动汽车续驶里程意义重大.另外,电池放电效率同样对续驶里程有着重要的影响,电池放电效率越高,续驶里程的数值也越大.d.电机对续驶里程的影响.电机参数中电机的效率 对续驶里程的影响最大.效率越高,续驶里程的数值越大.同时在各种工况下的效率对续驶里程的影响更大.因此对电动车用电机而言,不仅要求电机在额定状态下具有较高的效率,而且要求电机具有很宽的高效率区域,这样才能在各种行驶工况下充分利用有限的能量.对此,提出了增加一次充电续驶里程的措施:尽可能选择较低的行驶速度;降低轮胎的滚动阻力系数,选用低阻力轮胎;降低迎风阻力系数,进行车身的流线型改进;减轻汽车总质量;扩大电机的高效区范围及提高电机效率.3.2 最大爬坡度汽车的最大爬坡度,是指汽车满载时在良好路面上用第一档克服的最大坡度,它表征汽车的爬坡能力.爬坡度用坡度的角度值(以度数表示)的百分数来表示.设T tq为电机最大转矩;i g为变速器加速档传动比;i0为主减速器传动比; t为传动系的机械效率;r 为轮胎半径.则对于电动汽车来说,车辆的最大驱动力为[7]:F t=T tq i g i0 tr(5)而车辆的滚动阻力F f=mf cos ,坡度阻力为F i=m sin ,加速阻力.同时由于在计算最大爬坡度时车速很小,故可忽略空气阻力F W.由驱动力行驶阻力平衡公式F t= F=F f+F W+F i+F j,得到最大爬坡度 max的计算公式为:T tq i g i0 tr=mf cos max+m sin max(6)由式(6)可以看出,最大爬坡度与电机最大转矩T tq、轮胎半径r、整车总质量m和滚动摩擦系数f 等参数有关.a.电机参数对最大爬坡度的影响.在电机参数中,电机最大转矩的大小与车辆最大爬坡度的大小有着直接的联系[8].电机的最大转矩越大,最大爬坡度也越大.因此,从电机方面来说,若想提高车辆的爬坡性能,可以通过提高电机的最大转矩来实现.b.车辆参数对最大爬坡度的影响.图6,图7分别表示轮胎滚动阻力系数f和整车总质量m对车辆最大爬坡度的影响.从图6,图7中可见,轮胎滚动阻力系数和整车总重量都对最大爬坡度有很大的影响[9].要想获得合适的最大爬坡度,就必须合理地设置这2个参数.图6轮胎滚动阻力系数对最大爬坡度的影响图7 整车总质量对最大爬坡度的影响对此,提出了增加爬坡性能的措施:选择拥有较高最大转矩的电机;降低轮胎的滚动阻力系数,选用低阻力轮胎;减轻汽车总重量.4 结束语运用CRUISE软件对纯电动车进行建模和动力性能的仿真,得到了续驶里程、最大速度及最大爬坡度等指标,仿真结果验证了CRU ISE仿真动力性能的可行性.通过本文的仿真和分析,为电动汽车的参数选择以及结构优化提供了依据.参考文献:[1] 康龙云.电动汽车最新技术[M].北京:机械工程出版社,2008.[2] 王 斌,李 征,等.CR U ISE 软件在混合动力汽车性能仿真中的应用[J].计算机应用,2007,9(3):1-3.[3] 赵海峰.基于CR U ISE 软件的AM T 车辆性能仿真分析与实验研究[D].重庆:重庆大学,2005.[4] 王保华,罗永革.基于CRU ISE 的汽车建模与仿真[J].湖北汽车工业学院学报,2005,19(2):2-3.[5] 李国良,初 亮,鲁和安.电动汽车续驶里程的影响因素[J].吉林工业大学自然科学学报,2000,30(3):1-3.[6] 杜发荣,吴志新.电动汽车传动系统设计与续驶里程研究[J].农业机械学报,2006,37(11):3-4.[7] 余志生.汽车理论.3版[M ].北京:机械工程出版社,2000.[8] Cheng Chang T ing.H y br id electric vehicle design tominimize ener gy use [C].T he U niv ersity of T ex as at A rling ton,2000.[9] Sha Y L.T he pow er desig n and calculation o f EV S[A].T he 16t h Inter nat ional Batter y,H ybrid and F uel Cell Elect ric Vehicle Symposium &Ex hibitio n [C ].Beijing ,1999.作者简介:姜海斌 (1985-),男,江苏张家港人,硕士研究生,研究方向为汽车动力系统仿真以及汽车系统控制等;黄宏成 (1972-),男,江苏苏州人,副教授,研究方向为汽车系统控制以及底盘开发.ARM 7参数自整定模糊PID 控制器的仿真及设计王朝宁1,姜学东1,马立刚2(1.北京交通大学电气工程学院,北京100044;2.山西省电力公司吕梁供电分公司,山西吕梁033000)Design and Simulation of Self tuning PID type Fuzzy Controller Based on A RM 7ProcessorWANG C hao ning 1,JIANG Xuedong 1,MA Li gang 2(1.Schoo l o f Electrica l Eng ineering ,Beijing Jiaoto ng U niver sity,Beijing 100044;2.Shanx i L vliang P ower Supply Co mpany ,L v liang 033000,China)摘要:常规PID 控制器参数设定之后,运行环境改变时不能实现参数的在线整定,这样会影响系统的控制效果.本设计以误差e 和误差变化率ec 作为输入,经过一定的模糊推理规则,对PID 控制器的参数进行自动整定.在M atlab 环境下对系统进行了仿真,从仿真的结果可以看出,添加模糊控制环节后,系统的动静态性能得到了提高.同时基于ARM 7处理器完成了该控制器的软硬件设计.关键词:参数自整定模糊控制PID;M atlab;ARM 7处理器中图分类号:T P273文献标识码:A 文章编号:10012257(2010)04006505收稿日期:20091203Abstract:When operating environmentchang ed,the traditio nal PID contro ller can t online regulate its parameters,w hich are co nfigured w ellat the beginning.And that w ould affect contro l per for mance o f system.Taking erro r and decay r ate of err or as inputs in the desig n,arg um ents o f PID contro ller can reach self tuning function,as to some accurate fuzzy sets.From the result of simu -latio n done w ith M atlab,dy namic and static per -formances of system added fuzzy controller are im -proved.T he autho r also com pleted the hardw are and so ftw are desig n of the contro ller based on ARM7processor.Key words:self tuning PID type fuzzy con -troller;M atlab;ARM7processor0 引言模拟PID 闭环控制在常规的电源控制技术中应用很普遍,效果比较理想并且稳定,但其缺点是一。
CRUISE纯电动车动力性能仿真及优化
万方数据万方数据万方数据万方数据万方数据CRUISE纯电动车动力性能仿真及优化作者:姜海斌, 黄宏成作者单位:上海交通大学汽车工程研究院汽车电子控制技术国家工程实验室,上海,200240刊名:机械与电子英文刊名:MACHINERY & ELECTRONICS年,卷(期):2010,""(4)被引用次数:0次1.康龙云电动汽车最新技术 20082.王斌.李征CRUISE软件在混合动力汽车性能仿真中的应用 2007(3)3.赵海峰基于CRUISE软件的AMT车辆性能仿真分析与实验研究 20054.王保华.罗永革基于CRUISE的汽车建模与仿真 2005(2)5.李国良.初亮.鲁和安电动汽车续驶里程的影响因素 2000(3)6.杜发荣.吴志新电动汽车传动系统设计与续驶里程研究 2006(11)7.余志生汽车理论 20008.Cheng Chang Ting Hybrid electric vehicle design to minimize energy use 20009.Sha Y L The power design and calculation of EVS 19991.学位论文曹明柱混合动力电动车驱动电机控制系统研究2006随着能源枯竭和环境污染问题的日益突出,人们把目光转向了纯电动车和混合动力电动车。
由于纯电动车电池技术尚有待进一步提高,导致纯电动车距离市场化的目标仍然有一段距离,为此,开发混合动力电动车意义重大。
混合动力电动车中,一般同时采用驱动电机和发动机作为动力装置,通过先进的控制系统使两种动力装置有机协调匹配工作,实现最佳能量分配,达到低能耗、低污染及高度自动化。
因而,对混合动力电动车及其部件的控制是其关键技术之一。
现代电子控制单元开发流程——V模式采用计算机辅助工具进行,可以支持从需求定义直到最终产品的全过程。
采用V模式开发电子控制单元可以缩短开发周期、节约开发成本,而dSPACE仿真平台是支持这一流程的重要工具。
基于AVLCRUISE的某纯电动汽车驱动方案分析及参数匹配

10.16638/ki.1671-7988.2019.05.012基于AVL CRUISE的某纯电动汽车驱动方案分析及参数匹配徐展(苏州建设交通高等职业技术学校,江苏苏州215104)摘要:纯电动汽车驱动方案的选择及动力匹配是电动汽车开发过程中的关键,因此,文章以某微型纯电动汽车为研究对象,开展不同驱动方案和不同设计侧重下电动汽车的对比研究,首先根据整车基本参数和性能要求进行理论计算,然后使用Matlab软件在不同侧重点下进行了主减速器传动比的参数匹配,最后使用A VL CRUISE软件进行模拟仿真并对仿真结果进行科学分析,确定具体方案。
结果表明,侧重经济性匹配的电动轮式驱动方案能达到设计要求,在城市行驶工况下,能够保证一定的动力性,且经济性最佳。
关键词:电动汽车;驱动方案;参数匹配;AVL CRUISE中图分类号:U469.7 文献标识码:A 文章编号:1671-7988(2019)05-41-05Driving Scheme Analysis and Parameter Matching of a Pure Electric Vehicle Basedon A VL CRUISEXu Zhan(Suzhou Institute of Construction & Communications, Jiangsu Suzhou 215104)Abstract: The selection of driving scheme and power matching are the key points in the development of electric vehicles. This paper takes a miniature pure electric vehicle as the research object, and carries out comparative research on different driving schemes and different design emphases of electric vehicles. Firstly, the theoretical calculation is carried out according to the basic parameters and performance requirements of the whole vehicle. Then, the transmission ratio of the main reducer is matched by using MATLAB software under different emphasis points. Finally, A VL CRUISE software is used to simulate and analyze the simulation results scientifically to determine the concrete scheme. The results show that the electric wheeled driving scheme with emphasis on economic matching can meet the design requirements. Under urban driving cycle, it can ensure the certain power performance and the best economy.Keywords: electric vehicle; driving scheme; parameter matching; A VL CRUISECLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2019)05-41-05前言纯电动汽车驱动方案的选择及动力匹配是电动汽车开发过程中的关键,本文以一种微型纯电动汽车为研究对象[1],对车辆进行驱动方案影响因素分析及参数匹配,以实现车辆具备相应的动力性能和经济性能。
基于Cruise的纯电动汽车建模及仿真研究

基于Cruise的纯电动汽车建模及仿真研究Modeling and simulation of pure electric vehicles based on Cruise朱红军1 李智豪21.江苏金彭集团有限公司,江苏 徐州 2110112.安徽工程大学智能汽车线控底盘系统安徽省重点实验室,安徽 芜湖 241000摘要:为了缩短纯电动汽车设计开发周期,采用基于Cruise与MATLAB/SIMULINK联合仿真的方法,依据仿真试验结果对所选电机及所设计控制策略运行状态进行分析。
首先,运用Cruise软件搭建纯电动汽车仿真模型;其次,在MATLAB/SIMULINK中建立纯电动汽车控制策略;最后,通过两者的联合仿真,在多个工况下分析车速跟随情况、电机转速及扭矩、电池荷电状态(state of charge,SOC)值变化情况,进而分析控制策略与所选电机运行状况是否匹配,缩短整车电机选型、控制策略设计及开发的周期。
关键词:纯电动汽车;Cruise;联合仿真;控制策略中图分类号:U469.72 文献标识码:A0 引言随着国内外新能源汽车产业的蓬勃发展,市场对新能源汽车的产品设计提出新要求,因此汽车更新迭代速度极快[1]。
在新能源汽车开发过程中,缩短设计、试制和试验周期,提高产品设计准确性与快速审计对抢占汽车市场先机具有重要意义[2]。
本文基于某款纯电动汽车车型,搭建仿真模型,通过分析计算结果来评估整车所选电机及控制策略是否满足设计需求。
首先,利用Cruise软件完成纯电动汽车建模设计。
其次,利用MATLAB/ SIMULINK软件进行控制策略设计。
基于两个软件的联合仿真功能,建立多工况下的模拟仿真任务。
通过分析仿真试验结果,判断所选电机及控制策略是否合理。
最后,依托试验结果来验证电机选型和控制策略是否需要调整,避免在开发过程中盲目进行电机选型和控制策略设计,从而缩短开发周期[3]。
1 纯电动汽车结构及参数该纯电动汽车动力系统主要由电机、动力电池、单挡变速箱、电耗元件、驱动桥和车轮组成(图1)。
基于CRUISE软件的车辆动力性能建模与仿真

风阻系数
排 量( mL 1
0 . 6 5
2 7 9 8
速箱。 其基本传动路径为 : 发动机一离合器一变速 箱一传 动轴一 主减 速器一 差速 器一 车轮 。根据 结
构 和 布 置形 式 的分 析 选 用 模 型库 中 的整 车 模 块
( V e h i c l e) , 发 动机 模块 ( E n g i n e ) , 变 速 箱 模 块
轻 型汽 车技 术
2 0 1 3 ( 9) 总2 8 9
技 件的车辆动力性能建模与仿真
曹 玮
( 南 京依 维柯 汽车 有 限公 司 )
摘
要
本文 以 某款 车型 为研 究对 象 , 基于 C RUI S E软 件平 台 , 建 立 了其 整 车仿 真模 型. 确 定行 驶 工 况和 动 力性 的仿 真 任 务 , 对 于 两种 主减 速 比 的动 力 总成 匹配设 计
确 性 和 可行 性 。 所建 立的仿 真 分析模 型 和仿 真分析 结 果为后 续 对该 车动 力传 动 系 统参 数进 行优 化设 计打 下 了坚实基础 。
关键 词 : 车辆
动力 性
C R U I S E 仿真
Ft =F r 卜 F + F_ + F
1 前 言
动力性 是 车辆最基 本 、 最重要 的性 能之一 。 汽 车 动力传 动 系统 参数 匹配 的好坏 直 接影 响着 汽 车 的动 力性 ,合 理优 化 匹配 的传动 系不 仅 可 以提高 动 力性 、 减 少燃油 消耗 , 而 且还可 以取 得 良好 的排
进行 , 其效率 高 、 成本大幅降低 , 目前在工程上得 到 了越来 越广 泛 的应用 。
F _一 坡度阻力 , N F 口 速阻力 , N T 一 发 动机转 矩 , N・ m
基于CRUISE的纯电动轿车动力总成参数优化匹配及性能仿真分析_一汽技术中心_王燕等

基于CRUISE的纯电动轿车动力总成参数优化匹配及性能仿真分析王燕1,杨兴旺1,郑益红1,赵子亮1(1 中国第一汽车集团公司技术中心,长春市创业大街1063 号)[摘要] 在电动汽车开发过程中,动力总成的选型对整车动力性、经济性以及整车成本至关重要。
本文针对一汽某款纯电动轿车,提出了其电机、电池以及减速器等动力总成的匹配方法,并结合整车性能指标要求,应用AVL CRUISE软件对这些参数进行了匹配计算,得到了较为满意的结果,为下一步的整车开发奠定了基础。
实践表明,利用专业软件进行建模和仿真,可以大大提高动力总成参数匹配效率。
AVL CRUISE软件非常适用于整车前期开发的参数匹配和性能预测。
关键词:A VL CRUISE;参数匹配;减速器速比;经济性优化主要软件:A VL CRUISEPowertrain Parameters Design And Vehicle PerformanceSimulation of Battery Electric Vehicles Based On CRUISE Wang Yan1, Y ang Xingwang1 ,Zheng Yihong1,Zhao Ziliang11. CHINA F AW Co.,Ltd.R&D CENTER NO.1063 Chuangye Street,Changchun,jilin,China;[Abstract] It is very important for the powertrain selection which can affect the vehicle performance, consumption, cost and so on during the development process of electric vehicles. A method of parameters design of the motor, power batteries and transmission is put forward for a certain Electric Vehicle of FAW. According to the vehicle performance requirements, the software of A VL CRUISE was taken to design and calculate the vehicle parameters, and a satisfactory result was obtained from the calculation process, which established a foundation for the next vehicle development. The practice shows that the use of specialized software for modeling and simulation can greatly improve the efficiency of the powertrain parameters design, and A VL CRUISE is very suitable for parameters design and vehicle performance prediction in the prior phase of the vehicle development.Keywords: AVL CRUISE; parameters design; reducer ratio; economic optimization Software: AVL CRUISE1.前言随着电动汽车的发展,各大企业把越来越多的精力投入到混合动力和纯电动轿车研发上。
基于CRUISE的纯电动汽车动力参数匹配设计及仿真

基于CRUISE的纯电动汽车动力参数匹配设计及仿真作者:李胜琴于博来源:《森林工程》2019年第01期摘要:纯电动汽车是目前研究和开发的热点,而动力传动系统参数匹配设计是纯电动汽车的关键技术。
本文针对某款纯电动汽车,进行动力传动系统参数匹配设计。
按照整车性能要求,依据动力学原理,对车辆电机、电池、主减速比等动力参数进行设计及匹配计算,利用AVL CRUISE软件,建立目标车辆的整车模型,并用Simulink搭建制动能量回收模型,结合NEDC和FTP75两种典型工况进行联合仿真。
仿真试验结果表明,本文所设计的动力传动系统参数和制动能量回收控制策略能够满足目标车辆的性能要求,可以有效提高车辆的动力学性能,增加车辆的续驶里程,提高电池的寿命。
本文研究内容可以为纯电动汽车动力传动系统的设计和控制策略的研究提供参考。
关键词:纯电动汽车;动力系统;CRUISE仿真;制动能量回收中图分类号:U463.1 文献标志码:A 文章编号:1006-8023(2019)01-0080-07Abstract: Pure electric vehicles are the hotspot of current research and development, and the power train parameter matching design is the key technology of pure electric vehicles. In this paper,a power train parameter matching design is applied to a pure electric vehicle. According to the performance requirements of the vehicle and the dynamic principle, the design and matching calculation of the vehicle’s motor, battery, main reduction ratio and other dynamic parameters are carried out. The AVL CRUISE software is used to establish the vehicle model of the target vehicle,and the braking energy recovery model is built with Simulink. Combined with two typical working conditions, NEDC and FTP75, the joint simulation is carried out. The simulation results show thatthe power train parameters and braking energy recovery control strategy designed in this paper can meet the performance requirements of the target vehicle, which can effectively improve the dynamic performance of the vehicle, increase the driving range of the vehicle and improve the battery life. The research content of this paper can provide reference for the research of design and control strategy of pure electric vehicle power train.Keywords: Pure electric vehicle; power train system; CUISE simulation; brake energy recovery 0 引言随着能源危机的加剧,新能源汽车逐渐成为主角,已经成为今后的发展方向。
基于AVL_CRUISE的纯电动商

本文将根据一款在研纯电动商用物流车定义的整
车参数和性能要求,利用汽车理论设计法、先进软件仿
真分析法及转毂试验台架来设计和验证这套动力系统,
达成本项目开发目标,降低研发风险。
3 车辆动力系统零部件参数设计
31 纯电动商用车整体结构方案
本文所描述的纯电动商用车总体结构布置如图 1、
图 2 所示。该车型布置与传统商用车布置几乎一样,将
Te i0 η
(1)
式中,ig1 为变速箱 1 挡速比;αmax 为最大爬坡度;Te 为额
定扭矩;i0 为主减速比。
b最小传动比的匹配。
最小传动比 imin 应该满足车辆最高行驶车速的要
求,变速箱挡位为最高挡,此时 imin 为最高挡速比与主减
图 2 纯电动商用车总布置简图-俯视图
速比的乘积[5],即:
2 挡箱,速比为:一挡为 285,二挡为 1。
332 驱动电机功率计算
图 3 动力系统方案示意图
驱动电机的额定功率和峰值功率是驱动系统中 2
表 1 基本参数和性能
项目
基本参数
数值
总质量 m,kg
4 495
持续输出功率的最大值,对应的工况为汽车在平直路面
整备质量 m1,kg
2 654
持续匀速时对应的功率,此时汽车需克服滚动阻力及空
轴距 l,mm
3 300
气 阻 力 ,爬 坡 阻 力 和 加 速 阻 力 不 计 。
轮胎规格
700R16LT 8PR
轮胎滚动半径 r,mm
376
主减速比
617
迎风面积 A,m2
466ቤተ መጻሕፍቲ ባይዱ
风阻系数 Cd
045
旋转质量换算系数 δ
基于AVL CRUISE的某纯电动汽车驱动方案分析及参数匹配

基于AVL CRUISE的某纯电动汽车驱动方案分析及参数匹配徐展【摘要】The selection of driving scheme and power matching are the key points in the development of electric vehicles.This paper takes a miniature pure electric vehicle as the research object, and carries out comparative research on different driving schemes and different design emphases of electric vehicles. Firstly, the theoretical calculation is carried out according to the basic parameters and performance requirements of the whole vehicle. Then, the transmission ratio of the main reducer is matched by using MATLAB software under different emphasis points. Finally, AVL CRUISE software is used to simulate and analyze the simulation results scientifically to determine the concrete scheme. The results show that the electric wheeled driving scheme with emphasis on economic matching can meet the design requirements. Under urban driving cycle, it can ensure the certain power performance and the best economy.%纯电动汽车驱动方案的选择及动力匹配是电动汽车开发过程中的关键,因此,文章以某微型纯电动汽车为研究对象,开展不同驱动方案和不同设计侧重下电动汽车的对比研究,首先根据整车基本参数和性能要求进行理论计算,然后使用Matlab软件在不同侧重点下进行了主减速器传动比的参数匹配,最后使用AVL CRUISE软件进行模拟仿真并对仿真结果进行科学分析,确定具体方案.结果表明,侧重经济性匹配的电动轮式驱动方案能达到设计要求,在城市行驶工况下,能够保证一定的动力性,且经济性最佳.【期刊名称】《汽车实用技术》【年(卷),期】2019(000)005【总页数】5页(P41-45)【关键词】电动汽车;驱动方案;参数匹配;AVL CRUISE【作者】徐展【作者单位】苏州建设交通高等职业技术学校,江苏苏州 215104【正文语种】中文【中图分类】U469.7纯电动汽车驱动方案的选择及动力匹配是电动汽车开发过程中的关键,本文以一种微型纯电动汽车为研究对象[1],对车辆进行驱动方案影响因素分析及参数匹配,以实现车辆具备相应的动力性能和经济性能。
201_基于CRUISE的纯电动轿车动力总成参数优化匹配及性能仿真分析_一汽技术中心_王燕等

表 2 整车性能指标要求
项目 最高车速,km/h 0-100km/h 加速时间,s 动力性 0-50km/h 加速时间,s 爬坡度,% 马路台阶,mm NEDC 电耗,kWh/100km 经济性 NEDC 续驶里程,km ≥140 指标 ≥140 ≤12 ≤5 ≥30 100mm ≤15 加载 100kg 备注 半载 半载 半载 满载 满载
4.
4.1
动力总成参数匹配
驱动电机参数匹配 驱动电机参数匹配重点工作集中在电机峰值输出扭矩、电机峰值输出/输入功率、额定
输出功率、电机最高转速;同时在匹配电机参数时,需考虑不同工况工作点范围,为电机后 续设计提供数据支持。 4.1.1 电机峰值扭矩
电机峰值扭矩主要影响整车破路起步能力、攀爬马路台阶(curb hight)能力、起步加 速度,因此在减速器速比固定的前提下,主要考虑这些方面即可,峰值扭矩 Tmax=MAX (Tmax1,Tmax2) 。 (1)满足最大爬坡度的峰值扭矩 Tmax1 Tmax1 由最大爬坡度和最大速比(固定减速比)共同确定,关系式如式(1)所示:
(2)满足马路台阶(或 curb hight,100mm)的电机最大扭矩 Tmax2
此处考虑的是极端情况,即整车满载,正向,静止开始爬上马路台阶(100mm)即可, 对电机的需求扭矩较大。攀爬马路台阶是否有需求,这可根据整车设计需求而定。当电机需 求扭矩过大,无法进行合理的设计时,此处要求可降低。 考虑 curb hight,驱动轮受力情况如图 4 所示,由公式(2)可知,满足 100mm 的 curb hight 需求时,电机扭矩为 260Nm,同样考虑整车后续开发中,整备质量有增加的风险,预 留一定余量,选电机扭矩为 265Nm。验证其起步加速度为 4.04m/s^2,可满足典型工况起步 加速度要求。
基于Cruise混合动力环卫车驱动系统控制策略及传动系统设计与仿真
基于Cruise混合动力环卫车驱动系统控制策略及传动系统设计与仿真摘要:Cruise混合动力环卫车采用了混合动力系统,使得车辆的燃油消耗和污染物排放得到了优化。
但是,如何实现优化的能量管理和传动系统控制成为了一个必须面对的问题。
本文介绍了一种基于P2分级的混合动力驱动系统控制策略和传动系统设计,使用MATLAB/Simulink进行了仿真验证,结果表明该控制策略和传动系统设计具有较好的能量管理效果和良好的控制性能。
关键词:混合动力;P2分级驱动系统;能量管理;控制策略;MATLAB/Simulink仿真正文:Cruise混合动力环卫车采用了P2分级驱动系统,包括两个电机和一个发动机。
其中,电机1用于启动辅助发动机和实现纯电模式行驶,电机2用于提供较大的驱动力和制动力。
同时,为了实现优化的能量管理和传动系统控制,本文提出了一种基于P2分级的混合动力驱动系统控制策略。
首先,为了实现较好的能量管理和节能减排,本文采用了先进的负载线识别技术和能量管理策略。
在负载线的识别和预测方面,采用了基于历史驾驶数据的统计分析方法。
在能量管理策略中,采用了基于经验模态分解(EMD)的能量管理策略,通过对发动机、电池和电机进行能量调配和优化控制,实现车辆的能量利用最大化和污染物排放最小化。
其次,为了实现较好的传动系统控制性能,本文采用了基于电机1和电机2的卡尔曼滤波(KF)控制策略和基于控制器开关的离线预测控制方法。
在卡尔曼滤波控制策略中,采用了电机1和电机2的间接转速测量,对转速、转矩和输出功率进行控制。
而在离线预测控制方法中,采用了控制器开关来实现较好的转矩控制,通过对控制器开关的优化调节,实现对不同负载的适应性调节。
最后,本文使用MATLAB/Simulink进行了仿真验证。
仿真结果表明,采用该控制策略和传动系统设计,可以实现较好的能量管理效果和良好的控制性能,为混合动力环卫车提高了可靠性和实用性。
总之,本文提出了一种基于P2分级的混合动力驱动系统控制策略和传动系统设计,以实现优化的能量管理和传动系统控制。
基于Cruise的增程式纯电动汽车仿真匹配分析

20103908图2Range-Extended 原理图图1Volt结构图基于Cruise 的增程式纯电动汽车仿真匹配分析喻皓(广州汽车集团股份有限公司汽车工程研究院,广东广州510640)收稿日期:2010-06-30(Range-Extended )采用了特殊的纯电动模式,纯电动汽车在Cruise 软件下的仿真建模和部件匹配进行了分析。
结果表明,又能满足长距离行驶的要求。
;CRUISE ;仿真分析文献标识码:A文章编号:1009-9492(2010)08-0028-031前言增程式纯电动车Range-Extended 是目前比较流行的一种纯电动汽车形式,即将上市的通用公司研制的Volt 是其中的代表,如图1所示,这样一种混合动力方式主要由小功率的发动机、发电机、动力电池和大功率的驱动电动机组成,如图2所示。
其中车辆直接由大功率电机驱动,在驱动电机和主减速器之间可以根据需要增加变速器,通常的选择是一个两级减速器;动力电池为驱动电机提供能量,发动机与发电机机械连接,发动机通过发电机给动力电池补充能量。
车辆在只使用电池能量的情况下,可以满足城市居民日常出行的需要,晚上再通过市电电源给电池充电;而在需要长途行驶时候使用发电机给动力电池补充能量,在加油站中给油箱加油,延长行驶里程,满足长距离行驶的需求[1-3]。
AVL 公司开发的用于进行车辆仿真和传动模拟的软件Cruise 是研究汽车动力性、燃油经济性、排放性能及制动性的软件。
灵活的模块化理念使得Cruise 可以进行任意结构形式的建模和仿真。
它可用于汽车开发过程中的动力传动系的匹配,也可以用于开发和优化混合动力车和电动汽车。
Cruise 可以计算整车经济性、动力性、混合动力部件参数等,总的说来,Cruise 属于前向式仿真软件,相对于Advisor 等后向式仿真软件,前向式仿真软件的仿真更接近实际,可进行控制策略的开发,后向式仿真软件适于进行整车性能预测和部件选型。
基于+CRUISE+的纯电动汽车动力系统参数匹配与仿真
基于+CRUISE+的纯电动汽车动力系统参数匹配与仿真————————————————————————————————作者:————————————————————————————————日期:2第29卷第3期安徽工程大学学报Vol.29.No.32014年9月Journal of Anhui Polytechnic University ,文章编号: ( )基于CRUISE的纯电动汽车动力系统参数匹配与仿真牛明强,郭兴众∗,孙驷洲,李慧媛(安徽工程大学安徽省检测技术与节能装置重点实验室,安徽芜湖241000)摘要:开发和研究纯电动汽车是实现节能减排目标的重要手段之一.针对一款已知基本技术参数的电动汽车,根据该车动力性和经济性设计要求,基于理论计算对主要部件参数进行匹配设计,然后采用CRUISE软件搭建整车模型,对整车性能仿真分析.通过结果分析,证明理论设计参数满足设计要求,验证该方法的可行性,为纯电动汽车进一步设计研究提供理论依据.CRUISE关键词:纯电动汽车;参数匹配;仿真中图分类号: , 文献标识码:动力性和经济性是汽车重要的性能指标.动力性能通常用最高车速、加速时间和爬坡能力予以评价,经济性能通常用等速行驶与城市工况运行整车续驶里程予以评价[1].合理良好的整车参数匹配方法不仅可以满足整车的动力性要求,而且可以提高车辆续驶里程,提升车辆经济性能.使用专业汽车仿真软件搭建所开发车辆的模型,对整车主要性能进行仿真分析,缩短其开发周期,降低开发成本[2].纯电动汽车以车载能源(动力电池、超级电容等)为储能动力源,具有零排放、低噪声、应用成本低等优点,是汽车行业未来的主要发展方向.本文以某一款纯电动汽车开发为例,根据纯电动汽车理论设计原理,对整车参数进行匹配计算,并采用CRUISE软件搭建整车模型,对其动力性、经济性进行仿真分析研究.1参数匹配计算纯电动汽车动力系统参数匹配的主要任务是完成动力系统部件的选型和参数确定,即确定电机、电池.1.以及变速器的型式及其关键特征参数本文选取某电动汽车为研究对象,整车关键参数如表所示根据设计要求,本文设计的纯电动汽车性能指标如表2所示.表1纯电动汽车关键参数技术参数参数值技术参数参数值技术参数参数值外形尺寸/mm 4155∗1650∗1445迎风面积/m22.6风阻系数0.30轴距/mm 2400整备质量/kg 1550滚动阻力系数0.01车轮滚动半径/mm 307满载质量/kg 1850表2纯电动汽车性能指标动力性经济性最高车速最大爬坡度0~100km/h 60km/h NEDC /( / ) /( ) 加速时间/() 续驶里程/( ) 续驶里程/( ) km h %s km km12530151401001.1电机参数匹配驱动电机是纯电动汽车唯一的动力来源,是决定整车动力性与经济性的关键因素之一.选择电动汽车的驱动电机,需要匹配的参数主要有电机的类型、功率、转速和转矩等.电动汽车驱动电机功率应能满足电动汽车对最高车速、最大爬坡度以及加速时间的要求[3].(1)最高车速时,忽略坡度阻力,车辆主要受到滚动阻力和风阻的影响,最大需求功率为:收稿日期:2014-04-103基金项目:安徽省自然科学基金资助项目(1408085ME105)作者简介:牛明强(1989-),男,安徽淮北人,硕士研究生.通讯作者:郭兴众(1962-),男,安徽阜阳人,教授,硕导.4550安 徽 工 程 大 学 学 报第 29 卷u max ⎛C D Au 2⎫,()P v =mg f +⎪ .3600η ⎝⎭121 15式中 u为最高车速 C D 为空气阻力系数 η 为传动系效率 本文取= . f 为滚动阻力系数 A 为迎, max,,(0 9 ),,风面积./ )爬上一定坡度 j max时,最大需求功率为:2u α⎛ 20 km hC D Au α2⎫,()P i =mg fαmax +mgαmax +⎪.3600η ⎝cossin.⎭2式中,αj .arctan(3)车辆加速过程中,忽略坡路阻力,所受到的阻力主要包括滚阻、风阻以及加速阻力,加速后期所需功率最大,最大需求功率为:u m ⎛1C D Au m2u m ⎫,()P j=mg ft m + t m +δm⎪ 21 15 2 5 η1 52t ⎭3t m.. ×.式中,u m 为加速末汽车速度,t m 为加速时长,δ 为旋转质量换算系数.电动汽车驱动电机最大功率应能同时满足不同工况下的工况需求,即大于汽车对最高车速、爬坡度以及加速时间的功率要求,所以驱动电机最大功率 P max 需满足条件为:P max ≥ max {P v ,P i ,P j } ,4P max =λP 额,530 53 kW72 6 kW将本文研究汽车相关参数带入上述式中得出P v =30 1 kW,P i = ,P j = .因此电机最大功. ..率可选 P max =.一般取我国道路最高限速(/ )的稳定行驶功率作为电机额定功率下限值[4],本文取 P 额 =.由式()计算可知,电机过载系数λ= . .驱动电机最大转矩T max 需要满足汽车起步转矩和最大爬坡度转矩需求.在确定驱动电机最大转矩时,认为汽车以恒定速度行驶,则此时车辆行驶方程为:,()即6T max i max ηmα + 1AC D u w 2+ m g α ,()r dcossin27因此,电机最大转矩为:1⎡AC D u α2+m⎤⎢⎢mg f α+ αT max = ⎣cos2g sin ⎦r d , ()i max8式中,r d /(m )为轮胎滚动半径,i max 为最大传动比.η 永磁同步电动机结构简单、体积小、效率高,且永磁同步电机驱动系统在控制方式上可实现数字化,结构上可实现电机与齿轮箱一体化.基于以上优点,永磁同步电机被广泛应用于各种电动汽车驱动系统中 [5].据此,本文选择富奥汽车零部件股份有限公司生产的永磁同步电机主要性能参数如表 3 所示. 表 3 电机主要性能参数电机类型额定功率额定转速额定转矩 额定电压最大功率最大转速 最大转矩( )(/ )(m )( ) ( )(/ )(m )kWr minNVkW r minN永磁同步电机30 3 50082320 739 000 1991.2 动力电池参数匹配相比传统的铅酸电池,锂电池具有较高的能量密度,且有循环使用寿命长、安全系数高等优点,被广泛应用在纯电动汽车和混合动力汽车上.通过综合分析多种形式的锂电池组的安全性与存储性能等,本文选择磷酸铁锂离子电池组作为该车的储能装置.电池组电压等级应与电机工作电压相匹配,确定该车电池组电压等级U0=320V.根据整车设计目标要求,在电池组有效放电容量内,汽车以60km/h等速运行的续驶里程S至少为140km.电动汽车以u ele匀速行驶,电池负载功率为:67第3 期牛明强,等:基于 CRUISE 的纯电动汽车动力系统参数匹配与仿真51P ele =u ele ⎛C D Au ele2⎫,mg f +⎪21.15 , , 3600ηT ηcon ηbat ⎝⎭,,等速 u ele 条件下,满足一定行驶距离 S 所需能量为:P ele S,W road =P ele ×t = uele(9)(10)电池组能量需要符合的要求为W ele > W road .动力电池在一定的放电深度下,所能放出的额定能量为:U C soc,,(1 000)11.1011)可得满足汽车续驶里程条件下动力电池组容量为:由式( )与式(C= 1 000P ele S ,( )UsocU ele1215%.同时,本文还考虑到在实际运行时,汽车耗电附件耗电量约占整车耗电量左右 将相关参数带入计算确定电池组总电压为U 0 = 320 V ,容量 C = 60 Ah .本文确定的电池组具体参数信息如表4 所示.表 4电池组主要参数电池组类型 名义容量/(Ah )单体标称电压/(V )总电压/(V )电池节数磷酸铁锂离子电池组603.2 3201001.3 传动比匹配在电机输出特性一定时,电动汽车传动比的选择应满足汽车动力性能的要求,即应满足汽车最高期望车速 umax 、最大爬坡度αmax 以及加速时间 t m 的要求[6- 7].本文所研究的电动汽车采用固定速比单档减速器驱动车轮行驶,以提高传动效率及能源的利用率.传动系传动比的上限主要是根据发动机或者电机最高转速和车辆的最高车速共同确定的,其计算公式为:i max = .n max r d,0 377 u maxi =i 0 i g , 其中,n max /(r/min )表示电机最高转速,u max 表示汽车的最大速度,i 0传动比.(13 )(14)为主减速器传动比,i g 为单级减速器 对于传动系传动比下限的计算,主要由车辆设计最大爬坡度和电机最大转矩确定的,其计算公式为:i min =F i max rd ,( )ηT max15其中,F i max 表示最大坡度行驶时车辆所受阻力,T max 表示电机最大输出转矩.根据式(14)和式(15 )综合考虑,该汽车总传动比为8 .3,主减速器传动比取4.322 ,单档减速器传动比为1 .92 .2 AVL CRUISE 建模与仿真分析2 .1 仿真模型建立CRUISE 软件是一种针对汽车动力性、经济性进行分析的软件,采用模块化的设计方法,可以搭建多种结构形式的汽车传动系统模型,并可针对性地制定多种汽车性能仿真任务.本文整车模型模块选用整车模块、驾驶室模块、单级减速模块、电机、电池、车轮和制动器等模块,车辆模型如图1 所示.2.2 仿真结果分析(1)循环工况下整车特性分析.本文采用新欧洲循环工况(NEDC),基于准静态仿真,循环过程整车速度与瞬态电耗如图2所示.由速度曲线可知,匹配后的车速满足NEDC工况要求,跟随速度良好,行驶平稳,对应SOC变化也较为稳定.由SOC曲线可知,在工况运行前期,车速较低,电机需求功率较小,SOC水852安徽工程大学学报第29卷平下降缓慢;在工况运行后期,随着汽车速度增大,电机需求功率较大,SOC下降迅速;停车时SOC 没有明显变化,这是因为针对纯电动汽车电机无需怠速运转,停车时电机随即停止运行,不消耗能量.(2)加速工况分析.加速过程中,电机功率与车速变化如图3所示.驾驶员对目标功率需求越来越大,电机功率随之增大,直至达到电机最大有效功率.加速前期,车速变化迅速;加速后期,电机达图1整车CRUISE模型到最大功率后,车速变化逐渐趋软件的于平缓根据sult 报告,得到该车具体的全负荷加速任务结果,具体数据如表5.5可知,该车由静止加所示由表速至100km/h 所需时间为14.85s,行驶距离为240.07m.()最大爬坡度结果分析汽图2NEDC 工况车速与SOC变化图图3加速工况车速与电机功率图3.车最大爬坡度是汽车动力性能的一个重要指标,本文匹配对象的爬坡度曲线如图4所示.由图4可知,该车在速度为20km/h时,最大爬坡度为32.68%.在实际车速小于电机额定转速所对应的车速时,电机运行在恒扭矩工作区间,输出的最大扭矩恒定,所以汽车最大爬坡度变化很小;在实际车速大于电机额定转速所对应的车速时,电机运行在恒功率工作区间,输出的最大功率保持恒定,所以车辆最大爬坡度随车速的增加而不断减小.表50~100km/h加速时间车速/( / ) 时间/() 距离/( )电机转速/(/ ) 车速/( / ) 时间/() 距离/( )电机转速/(/ ) km h s m r min km h s m r min 202.296.051434.438010.20123.175737.43404.4824.432868.5910014.85240.077171.48606.8557.524302.89(4)最大速度结果分析.该车最高车速曲线如图5所示,根据CRUISE 软件的result 报告,可得该车最大速度为126km/h.满足本文整车最大速度125km/h的设计要求.(5)续驶里程结果分析.该车以60km/h 车速匀速行驶的电池SOC 变化曲线如图6所示.本文电池组有效容量为80%,根据CRUISE软件的result报告查知,该车SOC为15%时,续驶里程为144.67km,满足整车设计要求140km.NEDC循环工况时,由循环工况下整车特性分析可知,一个循环工况电池组SOC变化量.计算可得NEDC循环工况续驶里程为S=109.7km.(6)仿真结果与设计目标对比.本文针对开发车型的CURISE 仿真结果与开发前的设计目标对比结果如表6所示.由表6可知,经过理论设计匹配的整车传动系统参数满足设计要求.表6整车设计目标与仿真结果对比表指标设计目标仿真结果指标设计目标仿真结果最高车速/( / )125126/ 续驶里程/( )140144.679最大爬坡度/( ) 工况续驶里程/( ) / 加速/()1514.850~100km h s10第3期牛明强,等:基于CRUISE的纯电动汽车动力系统参数匹配与仿真53图4汽车爬坡度曲线图5车辆最高车速曲线图660km/h定速行驶SOC变化曲线3结论本文首先对一款处于纯电动汽车的传动系关键部件参数进行设计,然后对其进行建模和仿真.通过建立NEDC 工况巡航、最大速度、最大爬坡度和加速度任务得出该车动力性指标,通过建立60km/h等速行驶和NEDC工况巡航任务得出该车经济性指标.仿真结果显示,匹配后的动力系统满足设计要求.本文为电动汽车的参数匹配提供了一种有效的方法参考,也为后续电动汽车的结构优化和控制策略等深入研究奠定了模型基础.参考文献:[1] 王志福,张承宁.电动汽车驱动理论与设计[M].北京:机械工业出版社,2012:40-46.[2] 王锐,何洪文.基于CRUISE 的整车动力性能仿真分析[J].车辆与动力技术,2009(2):24-26.[3] 余志生.汽车理论[M].北京:机械工业出版社,2009:3-16.[4] 何洪文,余晓江.电动汽车电机驱动系统动力特性分析[J].中国电机工程学报,2006,26(6):136-140.[5] 周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究[D].长春:吉林大学,2013.[6] 郭孔辉,江辉,张建伟.电动汽车传动系统的匹配及优化[J].科学技术与工程,2010(10):3892-3896.[7] 刘贵如,王陆林,张世兵,等.电动汽车电子机械制动系统的研究与设计[J].安徽工程大学学报:自然科学版,2013,28(1):23-26.Parameter matching and simulation for the powertrainof pure electric vehicle based on CRUISENIU Ming-qiang,GUO Xing-zhong∗ ,SUN Si-zhou,LI Hui-yuan(Anhui Key Laboratory of Detection Technology and Energy Saving Devices,Anhui Polytechnic University,Wuhu 241000,China)Abstract:Developing and researching the pure electric vehicle is an important means to realize energy conservation and pollution reduction.As for a pure electric vehicle with basic technical parameters known and dynamic performance and economic consideration,this paper accomplishes the matching design for maj or components based on the theoretical calculation and then gives simulation analysis of the complete vehicle performance using the complete vehicle model built by CRUISE software.Results demonstrate that the theoretical design fulfills the demand and this method works.Also the results provide the theo-retical foundation for further design of pure electric vehicle.Key words:pure electric vehicle;Parameter matching;simulation based on CRUISE。
基于CRUISE的ISG混合动力系统匹配与仿真分析

本文以ISG混合动力系统汽车的动力系统作为主要研究对象,确定其主要系统参数,详细分析ISG混合动力系统的结构和工作原理。
并以某一传统燃油车为基础,为其匹配ISG混动系统,采用AVL公司的汽车仿真分析软件CRUISE作为仿真工具,分析匹配ISG混动相较传统燃油车的性能变化1 ISG混合动力系统介绍ISG混合动力系统主要由发动机、ISG电机、动力电池、整车控制系统等组成。
与传动的纯燃油发动机汽车相比,采用ISG混合动力系统的汽车可以选择功率相对较小的发动机做主动力源,使其基本保持在高效区域工作。
当遇到车辆需要大功率输出情况时,ISG电机会输出功率,辅助发动机动力输出,满足汽车的实际功率需求。
ISG混合动力系统把起动/发电一体电机与发动机曲轴的输出端固定连接在一起,这样就可以取消了原有的发动机飞轮。
根据实际设计需要,I SG混合动力系统可在发动机与变速器之间添加自动离合器。
这样使得ISG系统比BSG混合动力系统控制上更为灵活。
ISG混合动力系统具有发动机和ISG电机两个动力源输出动力,同时ISG还可以回收制动能量。
因此,ISG混合动力系统的控制策略对整车的动力性和经济性都有较大影响。
优秀的混动控制策略功能能够保证混合动力系统在不同使用工况下,根据发动机和ISG电机各自不同的特性,使整个混合动力系统在满足汽车实际工况需求的情况下高效运行。
控制策略要对ISG混合动力系统的实际工作模式进行控制和判断,同时还要保证发动机和ISG电机高效运行。
所有控制策略保证系统运行满足发动机最低和最高转速、ISG电机最大转速和转矩、动力电池SOC 范围、车速最大值等诸多限制条件。
2 CRUISE软件的特点CRUISE软件是由奥地利AVL公司开发的一款应用于车辆动力学的仿真软件,该软件可以实现传统燃油车、纯电动汽车和各种结构的混合动力电动汽车整车动力性、经济性分析,既可以应用在传统车的开发流程中,也可以应用在新能源汽车以及特种车辆的开发流程中。
基于Cruise混合动力环卫车驱动系统控制策略及传动系统设计与仿真

基于Cruise混合动力环卫车驱动系统控制策略及传动系统设计与仿真摘要:本论文介绍了Cruise混合动力环卫车的驱动系统控制策略及传动系统设计与仿真。
首先,对Cruise混合动力环卫车的驱动系统进行了分析,包括电机、发动机、电池组、变速箱和差速器等关键组成部分。
其次,本论文提出了一种基于能量管理的控制策略,有效提高了车辆的燃油经济性和行驶性能。
最后,本论文通过Matlab/Simulink软件对传动系统进行了建模和仿真,验证了设计方案的可行性和有效性。
关键词:Cruise混合动力环卫车;驱动系统;控制策略;传动系统;能量管理正文:一、引言近年来,由于环境问题越来越严重,节能减排成为了各国普遍关注的话题。
作为交通运输领域的主要污染源,汽车的节能减排也成为了全球研究的热点之一。
混合动力汽车因其具有高效、环保、经济等特点,逐渐成为了各国政府和汽车制造商的重要发展方向。
在环卫车领域,混合动力环卫车的应用也越来越广泛。
Cruise混合动力环卫车是一款具有高效、环保、节能等特点的车型,其驱动系统主要由电机、发动机、电池组、变速箱和差速器等组成,具有较高的智能化和自动化水平。
为了提高车辆的燃油经济性和行驶性能,本论文提出了一种基于能量管理的控制策略,并对传动系统进行了建模和仿真,以验证设计方案的可行性和有效性。
二、Cruise混合动力环卫车驱动系统分析Cruise混合动力环卫车的驱动系统分为电动模式、混合动力模式和燃油模式三种模式,具有高效、环保、节能等特点。
其中,电动模式下,车辆通过电池组和电机直接驱动,具有快速响应、静音、零排放等特点;混合动力模式下,车辆通过发动机和电动机协同工作,充分利用能源,提高了车辆的燃油经济性和动力性能;燃油模式下,车辆通过燃油发动机驱动,具有高速巡航能力。
三、基于能量管理的控制策略为了充分利用不同模式下的能源,提高车辆的燃油经济性和行驶性能,本论文提出了一种基于能量管理的控制策略。
纯电动牵引车动力系统参数匹配与仿真
纯电动牵引车动力系统参数匹配与仿真赵强;曲万达;张国栋;陈丽君【摘要】Type selection and parameter matching were carried out for motor and power battery of a pure electric tractor according to vehicle power and economic index. Performance simulation model was built in CRUISE environment, and simulation analysis was made regarding maximum speed, acceleration time, maximum gradeability and economy under different driving conditions. Simulation results were compared with test results, which show that the power system parameter matching process of this electric tractor is rational, the simulation analysis method is reliable and effective.%以某纯电动牵引车为研究对象,依据汽车动力性、经济性指标对该牵引车的电机和动力电池进行了选型和参数匹配.利用CRUISE软件搭建了性能仿真模型,针对不同工况对该车进行了最高车速、加速时间、最大爬坡度及经济性仿真分析.仿真结果与试验结果对比表明,该纯电动牵引车动力系统参数匹配过程合理,仿真分析方法可靠有效.【期刊名称】《汽车技术》【年(卷),期】2017(000)009【总页数】5页(P53-57)【关键词】纯电动牵引车;参数匹配;仿真【作者】赵强;曲万达;张国栋;陈丽君【作者单位】中国第一汽车股份有限公司技术中心,长春 130011;中国第一汽车股份有限公司技术中心,长春 130011;中国第一汽车股份有限公司技术中心,长春130011;中国第一汽车股份有限公司技术中心,长春 130011【正文语种】中文【中图分类】U462目前,大部分纯电动商用车是在原柴油车的基础上进行改装,导致整车动力性、经济性发生变化[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e l e c t r i c s a ni t a t i o n v e h i c l e b a s e d o n CRUI S E
YUAN F e n g, ZHANG Hu, CHEN Ch e n g
AVL CRU I S E 软 件是 用 于 车 辆 系 统 动 力学 仿
电 )、动 力 电 池组 、超 级 电容 器 、DC / DC 转 换 器
a 电机 一 变速箱一 减 速 器 驱 动
b 电机 一 减 速 器 驱 a 中驱 动 电机通 过变 速箱 、减 速 器传 动 ,最 终驱 动后 桥 ,可 以降 低对驱 动 电机 的转矩 需求 。
D Ohl 0 . 1 4 1 8 9  ̄ . c n k i . c m1 9 8 1 . 2 0 1 6 . 1 1 . 0 0 1 [ 收稿 日期 ]2 0 1 6 — 0 8 — 0 3
[ 通讯 地址 ]袁峰 ,湖 南省长 沙市长沙县 人民东路 与东六
路 交 汇 处
C O N S T R U C T I O N M A C H I N E R Y 2 0 1 6 . 1 1 51
图l b 中驱 动 电机 直 接 与 固定 速 比 的减 速 器 相
等 元件 ,可 实现对 纯 电动 汽车 、混合 动 力 电动汽 车 以及燃 料 电池 电动汽 车的仿 真 分析 。 纯 电 动 环 卫 车 辆 是 用 于 城 市 市 容 整 理 、 清 洁 的 专 用 车辆 ,具 有 作 业 半 径 小 ( 小于3 0 m )、 工作 速度 低 ( 小 于4 0 k m/ h)和 加 速 性 能 要 求 低 ( 0~5 0 k m / h 约为1 5 s )的特点 ,其 传 动 系统可 分 为
以3 0 k m/ h 速 度爬 1 2 %坡 道 ,忽略 风阻 力 ,则 电
机的输 出功率为
U3 o
滚动阻力系数厂 车辆 迎风 面积A , m
空 气阻 力系数
0 . 0 1 2 2 . 5 5
0 . 5 2
g2 -
叼. (
、
joU
m
g f + m m g ‘ z )
度 ,1 2 %。
真分析的高级软件 ,可实现对复杂车辆动力传动系
统 的 仿 真 分 析 ,通 过 其 便 捷 通 用 的模 型 元 件 、直
观 易 懂 的数 据 管 理 系统 以及 基 于 工 程 应 用 开 发设 计 的 建 模 流 程 和 软 件 接 口 ,用 于 车 辆 的动 力 性 、
燃 油 经 济 性 以及 排 放 性 能 的仿 真 。混 合 动 力元 件 库 ( Hy b r i d L i b r a r y) 包 含混 合 动 力 电机 ( 电动/ 发
专题 研 究
l s c H
式中 P 为最高车速时驱动功率 ,k W ;U a 为最大 爬 坡度 下 的车 速 ,取 2 0 k m/ h ;沩 最 大爬 坡 度 ,取
2 O% 。
越的加速性能 ,其技术参数直接影响车辆的动力性 和经济性 ,必须按照动力性能指标合理选择电机 。 本文以某型号纯电动环卫车为例 ,进行驱动电机和 动力 电池 的选型 ,该车辆技术性能如下 :
最 大 总质量md k g 整备 质量mo &g 轴距a / mm 车轮 滚动半 径 r / m 3 5 0 0 2 5 0 0 2 7 0 0 0 . 3 1 6
代入上述参数后计算得P I n = 3 7 . 6 k W。 2 . 3 1 2 %坡 度时计 算驱 动 电机功 率
( 3 )
空气密度P/ ( , m )
旋 转质 量 系数
主减速 [ : L i o
1 . 2 3
1 . 0 5
5 . 8 5 7
式中 P 为爬 1 2 %坡道时驱动功率 ,k W ;U 3 0 为爬 1 2 %坡道 的最 低 车速 ,3 0 k m/ h ;/ ‘ 1 2 为 当前 工 况下 坡
性 与经 济性 进 行仿 真分 析 。
[ 关键词 ] 纯电动环卫车;动力 配 ;仿真 [ 中图分类号 ] U 4 1 8 3 [ 文献标识码 ] A [ 文章编号 ]1 0 0 1 — 5 5 4 X( 2 0 1 6 )l 1 - 0 0 5 1 - 0 6
Dy n a mi c pa r a me t e r s mat c hi ng a n d s i m ul a t i o n o f t he c ha s s i s o f t he pur e
电机一 变 速 箱一 减 速 器驱 动 和 电机 一 减 速 器驱 动 2 种
方式
连 ,传动链短 、 传动效率较高 ,同内纯电动车辆多
采用 此驱 动形 式 。
2 整车 匹配计算
在 纯 电 动 汽 车 中 ,驱 动 电 机 是 唯 一 动 力单 元 ,从储 能装 置 中获得 的 电能转 化 为机械 能驱 动 车
l 技 术 方 案
本 文提 出的某型号纯电动环卫车在设计初期
有2 种 驱 动方 案 ,即 电机一 变速 箱一 减 速 器驱 动 ( 简 称 变 速箱 方 案 )和 电机 一 减 速 器驱 动 ( 简称 直 驱 方 案 ),其 系统结 构如 图 l 所示。
轮 ,在低转速H e r o 可获得峰值转矩 ,使车辆具有卓
s眦
cH
f 专 题 研 究
基 于C R U I S E 的纯 电动环 卫车底 盘动力 参数 匹配与仿真
袁 峰 ,张 虎 ,陈 诚
长沙 4 1 0 1 0 0) ( 北 汽 福 田汽 车 股 份 有 限公 司长 沙汽 车 厂 ,湖 南
[ 摘要 ]根据某纯电动环卫车的技术参数,进行底船动 力匹配 .利用AV L C R U I S E 软件对该车动力