MATLAB虚拟现实技术实现飞机绕大楼
基于MATLAB和VR工具的“移动通信网络”课程的实验教学设计

基于MATLAB和VR工具的“移动通信网络”课程的实验教学设计作者:熊磊赵红霞来源:《无线互联科技》2024年第07期摘要:为了满足工业革命4.0的需求,文章提出了在“移动通信网络”课程实验过程中使用虚拟现实(Virtual Reality, VR)工具与MATLAB仿真结合的教学设计。
其设计理念包括实验项目场景的建模、计算和调试,根据模型参数进行VR动态界面展示实验结果。
学生通过虚拟仿真实验进行实践,实验效果可以和实物进行互相验证,大幅提升学生做实验的效率和体验感。
文章对学生实验仿真效果进行综合性评估,得出该教学设计能够提升学生的积极性和活跃度,给学生留出发挥自主性、积极性和创造性的空间,从而提高教学质量。
关键词:VR工具;MATLAB仿真;通信网络中图分类号:G642 文献标志码:A0 引言随着信息系统在许多领域迅速发展,这种变化的一个很好的例子就是工业4.0革命,从1G空白、2G跟随、3G突破、4G到5G领先,随着通信网络的发展,将人和人连接起来[1]。
不管是简单的语音,还是后来的短信以及接下来的移动通信网络中数据所开发出来的各种各样的业务,给人们的生活带来了极大的便捷。
我国通信抓住移动网络的发展机遇,在未来30年内伴随着通信和各种技术的碰触和创新,给世界带来万物万联的结果[1]。
基于此通信时代的背景,为使“移动通信网络”课程实验内容更加生动形象,运用虚拟现实(Virtual Reality, VR)工具与MATLAB仿真软件在实验项目环节中融合,使学生在实操中具有身临其境的体验感[2]。
结合实验教学,教师围绕设计进行理论教学,促进学生从理性认识到感性认识再到理性认识的飞跃。
1 “移动通信网络”课程实验教学1.1 实验内容“移动通信网络”课程的目标之一为认知通信网络的架构。
基站能够利用无线电波感知周边的环境、物体的形状和运动;核心网主要负责呼叫的接续、计费、移动性管理。
基于此課程目标,教师在教学实验中发布车联网V2V仿真测试实验项目卡。
Matlab在飞行器设计与控制中的应用指南
Matlab在飞行器设计与控制中的应用指南飞行器设计与控制是航空领域中至关重要的技术领域之一。
实现一个高性能、稳定可靠的飞行器需要精确的设计和控制算法。
而Matlab作为一种强大的数值计算工具和开发环境,在飞行器设计与控制中发挥着至关重要的作用。
本文将重点介绍Matlab在飞行器设计与控制中的应用指南。
1. 飞行器建模与仿真飞行器的设计与控制首先需要建立准确的数学模型。
Matlab提供了丰富的工具箱和函数,可以方便地进行飞行器的建模和仿真。
首先,可以利用Matlab的Simulink工具进行连续系统和离散系统的建模。
通过建立准确的飞行动力学方程和传感器模型,并结合各种环境因素,如空气动力学和风扰动,可以得到真实可靠的仿真结果。
此外,Matlab还可以使用SimMechanics工具箱进行多体动力学建模,以更精确地描述飞行器的运动。
2. 飞行器姿态控制飞行器的姿态控制是保持飞行器稳定飞行的核心问题。
Matlab为飞行器姿态控制提供了丰富的控制设计和分析工具。
例如,可以使用Matlab内置的Control System Toolbox来设计和优化飞行器的控制器,并通过频域分析和根轨迹等工具评估系统的稳定性和性能。
此外,Matlab还提供了强大的优化工具,如优化和鲁棒控制工具箱,可以帮助用户通过自动化方法获得最优的控制器参数。
3. 导航与定位在飞行器设计与控制过程中,导航与定位是不可或缺的。
Matlab提供了一套完整的导航和定位算法工具箱,可以方便地进行导航滤波、轨迹规划、姿态解算等操作。
例如,可以使用自适应卡尔曼滤波算法对飞行器的姿态和位置进行准确估计。
此外,Matlab还提供了GPS和惯性导航系统的仿真工具,可以模拟不同环境下的导航和定位性能。
4. 通信与数据处理在现代飞行器中,通信与数据处理起着关键的作用。
Matlab提供了一系列用于通信系统设计和数据处理的工具箱,如通信工具箱、图像处理工具箱等。
MATLAB在虚拟现实技术中的应用
计 算 机 与 网 络 创 新 生 活
MAT A L B在虚 拟现 实技术 中的应用
曹娟 赵旭 阳 米文鹏 洪成华
( 第二炮兵士官学校 1 3 1 0 教研室 山东 青州 22 0 ) 65 0 ( 第二炮兵士官学校 2 2 2 0 教研 室 山东 青州 22 0 ) 65 0
我 就 选 与S u k 号 接 虚 世 虚 现 们 可以 择 i l 信 连 的 拟 界。 拟 实 mi n
工具 箱 为 可 用 的 VR VL节 点 自动 搜索 虚 拟 世 界 。 AI 所 有 Ⅵ 他 节 点 属 性 均 列 在 等 级 树 样 式 的 观 察 窗 口中 , 我们 可 以选 择 控 制 的 自由 度 。关 闭接 口对 话 框 后 , 拟 现 实 工 虚 具 模 块 自动 更 新 在 虚 拟 世 界 中 与 选 择 节 点 有 关 的输 入 及 输 出 。当 连 接这 些输 入 到 一 定 的 s T h k信 号 , 们 就 可 以在 一 il n Iu 我 个 支持 Ⅵ L的浏 览 器 中观 察 到 可视 化 的模 拟 。
等 。 业 性 较 强 专 。
MA L B 中 包 括 虚 拟 现 实 工 具 箱 ( i u  ̄t o l T A V r a Ke y T o tl -
b X , 的 主 要 功 能 是 在 MATL o )它 AB和 Smtik中 创 建 和 处 理 i tn l
基 本 要 素 【】 2 _ 3
㈩ , o e ( ,o ey e ( ,p n( ,e a ( , v ( , tw) n dsw)n d tp sw)o e w)rl dw)s ew)s ( , o a e
一
建 模 仿 真 功 能 、 字 处 理 功 能 以及 硬 件 的 实 时 交 互 功 能 , 用 文 能
基于matlab的四旋翼控制仿真与抗干扰验证
基于matlab的四旋翼控制仿真与抗干扰验证1. 引言1.1 背景介绍四旋翼飞行器是一种新兴的无人机飞行器,具有垂直起降和灵活性强的特点,在军事、民用和科研领域都有广泛应用。
随着科技的发展和社会的需求不断增加,四旋翼飞行器的控制系统设计和稳定性问题成为研究的热点之一。
在四旋翼飞行器的控制系统设计中,控制算法的选择和实现是至关重要的。
控制算法的设计直接影响到飞行器的稳定性和飞行性能,因此需要针对四旋翼飞行器的特点和需求来设计相应的控制算法。
通过基于Matlab的仿真分析,可以模拟四旋翼飞行器在不同环境和条件下的飞行情况,验证控制算法的有效性和稳定性。
抗干扰验证也是十分重要的,因为四旋翼飞行器在实际飞行中会受到各种干扰因素的影响,需要设计相应的控制策略来应对。
本文旨在通过基于Matlab的四旋翼控制仿真与抗干扰验证,研究四旋翼飞行器的控制系统设计和稳定性问题,为提高飞行器的飞行性能和稳定性提供理论支持和实验数据。
也希望为今后进一步研究和开发四旋翼飞行器提供参考和借鉴。
1.2 研究目的研究目的是通过基于Matlab的四旋翼控制仿真与抗干扰验证,探索四旋翼控制系统设计中的关键技术和方法,提高四旋翼系统的飞行稳定性和精度。
具体目的包括但不限于:深入研究四旋翼控制系统的设计原理和模型,探讨控制算法在四旋翼系统中的实际应用,分析控制系统对不同外部干扰的响应能力。
通过仿真验证和抗干扰实验,验证控制算法在不同环境条件下的有效性和稳定性,为四旋翼系统的工程应用提供理论支持和技术指导。
通过研究实践,深入理解四旋翼系统的控制原理,为进一步完善四旋翼系统的控制性能以及解决其在实际应用中面临的挑战提供参考和方向。
通过本研究,旨在为四旋翼控制技术的研究和应用提供新的思路和方法,推动四旋翼技术的发展和应用。
1.3 研究意义四旋翼无人机在军事、民用领域得到了广泛的应用,随着无人机技术的发展,其控制系统的设计和性能优化变得尤为关键。
基于MATLAB的无人机自主飞行控制系统设计与实现
基于MATLAB的无人机自主飞行控制系统设计与实现一、引言随着科技的不断发展,无人机技术在各个领域得到了广泛的应用,如农业、航拍、物流等。
而无人机的自主飞行控制系统是保证无人机飞行安全和稳定性的关键。
本文将介绍基于MATLAB的无人机自主飞行控制系统设计与实现。
二、无人机自主飞行控制系统概述无人机自主飞行控制系统是指通过预先设定的飞行路径和控制算法,使无人机能够在没有人为干预的情况下完成飞行任务。
该系统通常包括传感器、执行器、控制算法等组成部分。
三、MATLAB在无人机控制系统中的应用MATLAB作为一种强大的工程计算软件,在无人机控制系统中有着广泛的应用。
其强大的数学计算能力和丰富的工具箱使得设计和仿真无人机控制系统变得更加高效和便捷。
四、无人机自主飞行控制系统设计步骤1. 确定飞行任务需求在设计无人机自主飞行控制系统之前,首先需要明确飞行任务的需求,包括起飞、巡航、航点跟踪、着陆等。
2. 传感器选择与布局根据飞行任务需求选择合适的传感器,并合理布局在无人机上,常用传感器包括GPS、惯性测量单元(IMU)、气压计等。
3. 控制算法设计设计合适的控制算法是保证无人机稳定飞行的关键。
常用的控制算法包括PID控制器、模糊控制、神经网络控制等。
4. 系统建模与仿真利用MATLAB对无人机自主飞行控制系统进行建模和仿真,验证设计的控制算法在不同场景下的性能表现。
5. 硬件实现与调试将设计好的控制算法烧录到无人机飞控硬件中,并进行调试和优化,确保系统稳定性和可靠性。
五、基于MATLAB的无人机自主飞行控制系统实现案例以一架四旋翼无人机为例,通过MATLAB/Simulink搭建了其自主飞行控制系统。
通过PID控制器实现了姿态稳定控制和高度保持功能,在不同飞行任务下表现出良好的性能。
六、总结与展望本文介绍了基于MATLAB的无人机自主飞行控制系统设计与实现过程,强调了传感器选择与布局、控制算法设计、系统建模与仿真以及硬件实现与调试等关键步骤。
最近邻算法实现多目标航迹关联(matlab代码)
近年来,随着无人机、航天器等飞行器的应用逐渐普及,航迹关联成为了航空航天领域中一个备受关注的课题。
而最近邻算法作为一种常用的目标关联算法,其在多目标航迹关联中得到了广泛的应用。
本文将针对最近邻算法在多目标航迹关联中的应用进行深入探讨,并结合Matlab代码实现具体的算法过程。
1. 背景介绍在航空航天领域中,多目标航迹关联是指在多个雷达或传感器的监测下,将不同时间段内同一个目标的航迹点进行匹配关联,以确定目标的飞行轨迹和状态。
多目标航迹关联的任务是十分复杂和困难的,因为在真实环境中,目标可能会受到噪声、干扰、遮挡等因素的影响,导致航迹点的不确定性。
设计一种高效准确的航迹关联算法对于实际应用具有重要意义。
2. 最近邻算法原理最近邻算法是一种常用的模式识别和数据挖掘算法,其基本原理是通过计算样本点之间的距离,将每个样本点与其最近的训练样本点进行匹配。
在多目标航迹关联中,最近邻算法可以被用来将当前时刻的航迹点与之前时刻的航迹点进行匹配,从而实现目标的关联。
3. 最近邻算法在航迹关联中的应用在航空航天领域中,最近邻算法经常被用来进行航迹点的匹配,以确定目标的飞行状态和轨迹。
其具体应用场景包括但不限于飞行器导航、空中交通管理、目标跟踪等。
4. 最近邻算法的Matlab实现下面我们通过Matlab代码来演示最近邻算法在多目标航迹关联中的具体实现过程。
```matlab设置参数threshold = 10; 设定阈值初始化航迹点track_points = [10, 20; 15, 25; 30, 40]; 当前时刻的航迹点prev_track_points = [8, 18; 12, 22; 28, 38]; 前一时刻的航迹点计算距离矩阵distance_matrix = zeros(size(track_points, 1),size(prev_track_points, 1));for i = 1:size(track_points, 1)for j = 1:size(prev_track_points, 1)distance_matrix(i, j) = norm(track_points(i, :) -prev_track_points(j, :));endend航迹点匹配matched_p本人rs = [];for i = 1:size(track_points, 1)[min_distance, min_index] = min(distance_matrix(i, :));if min_distance < thresholdmatched_p本人rs = [matched_p本人rs; i, min_index];endenddisp(matched_p本人rs); 输出匹配的航迹点对```5. 结语最近邻算法作为一种简单高效的目标关联算法,其在航空航天领域中具有重要的应用前景。
Matlab技术在航空航天中的应用案例解析
Matlab技术在航空航天中的应用案例解析第一章:引言航空航天技术一直是人类科技进步的重要领域之一,而Matlab作为一种强大的数学建模和仿真工具,在航空航天领域中的应用也日益广泛。
本文将通过几个具体案例来探讨Matlab技术在航空航天中的应用,并解析其在提升效率、降低成本和增强安全性等方面的价值。
第二章:飞机性能计算与优化航空工程中关于飞机性能的计算和优化是常见的任务。
利用Matlab可以轻松实现对飞机性能的快速计算,并进行优化设计。
例如,在飞机气动力学研究中,可以通过编写Matlab程序来计算飞机的升力、阻力和推力等重要参数,从而评估飞机的性能。
进一步,结合优化算法,可以利用Matlab进行飞机性能的多目标优化,以实现在不同工况下的最佳飞机设计。
第三章:航天器轨迹与导航控制航天器的精确轨迹设计和导航控制是保证航天任务顺利进行的重要环节。
利用Matlab工具箱中的航天动力学建模和导航控制工具,可以实现对航天器轨迹和导航控制系统的分析与设计。
例如,在火箭发射过程中,可以利用Matlab编写程序,根据发射场地的经纬度和目标轨道的参数,计算出火箭的发射方位、速度和加速度等信息,从而实现精确的轨迹控制。
第四章:飞行机载传感器数据处理航空器和航天器上搭载的大量传感器提供了丰富的飞行数据,如温度、大气压力、速度等。
而这些数据的处理和分析对于飞行安全和预测模型的建立至关重要。
Matlab提供了强大的数据处理和分析工具,可以有效地处理和分析这些飞行数据。
例如,在飞机失事事故的调查中,通过对飞行数据进行Matlab分析,可以辅助确定事故原因并改进飞行系统的设计。
第五章:通信系统仿真与性能评估通信系统在航空航天领域中扮演着至关重要的角色。
利用Matlab可以进行通信系统的仿真建模和性能评估。
例如,在无线通信系统中,可以利用Matlab工具箱中的通信工具箱进行通信链路的建模,并通过信道仿真预测信号质量和误码率等性能指标。
MATLAB在无人机控制与飞行路径规划中的应用与实践经验分享
MATLAB在无人机控制与飞行路径规划中的应用与实践经验分享无人机的快速发展已经使其在各个行业中得到了广泛的应用,从军事到民用,从科研到商业。
而无人机的控制与飞行路径规划是无人机技术中的核心问题之一。
在这方面,MATLAB作为一个功能强大且易于使用的数学建模与仿真工具,被广泛应用于无人机行业。
本文将介绍MATLAB在无人机控制与飞行路径规划中的应用,并分享一些实践经验。
无人机的控制可以分为稳定控制和导航控制两个部分。
稳定控制主要是针对无人机的姿态和位置进行控制,使其能够保持平衡和稳定。
而导航控制则是指无人机的航向、高度等飞行参数的控制。
MATLAB提供了丰富的工具箱和函数,可以方便地进行无人机控制算法的设计与实现。
在进行无人机的控制算法设计时,MATLAB提供了一个强大的控制系统工具箱,可以用于建立无人机的数学模型,进行系统仿真和控制器设计。
通过该工具箱,我们可以选择合适的控制策略和参数,进行闭环系统的仿真。
同时,MATLAB还提供了各种控制器设计方法和优化算法,如PID控制器、LQR控制器、模型预测控制等,可以根据具体的无人机控制需求进行选择和应用。
无人机的路径规划是指确定无人机的航迹,使其能够按照预定的路径进行飞行。
MATLAB提供了优化工具箱和图像处理工具箱,可以用于无人机的路径规划问题。
其中,优化工具箱提供了各种优化算法,如遗传算法、模拟退火算法等,可以用于解决无人机路径规划的最优化问题。
通过选择合适的目标函数和约束条件,可以实现无人机航迹的最优规划。
而图像处理工具箱则可以用于无人机的视觉导航和路径规划。
通过对地面图像的处理和分析,结合无人机的传感器信息,可以实现无人机在复杂环境中的自主导航和路径规划。
除了控制和路径规划,MATLAB还可以用于无人机的姿态估计、目标跟踪、避障等问题。
通过集成各种传感器数据,MATLAB可以实现无人机姿态的估计和校正。
同时,通过图像处理和目标识别算法,可以实现无人机对目标物体的跟踪和定位。
基于matlab利用加速度计和陀螺仪实现绘制轨迹的方法
基于matlab利用加速度计和陀螺仪实现绘制轨迹的方法1. 引言1.1 概述本文旨在利用加速度计和陀螺仪技术实现绘制轨迹的方法。
随着科技的不断进步,人们对于定位和姿态信息的需求越来越高。
加速度计和陀螺仪作为常见的惯性传感器,具有获取物体运动状态的功能,已经被广泛应用于导航、无人机控制、虚拟现实等领域。
本文将介绍利用这两种传感器实时获取姿态信息,并通过适当的算法处理和分析数据,最终实现轨迹重构与绘制。
1.2 文章结构本文共分为五个部分:引言、加速度计和陀螺仪简介、利用加速度计和陀螺仪实时获取姿态信息、绘制轨迹的方法及实现步骤介绍以及结论与展望。
在引言部分,将明确文章的背景意义以及所要研究解决的问题;接着,在加速度计和陀螺仪简介中,将详细阐述它们的工作原理以及应用场景;然后,在利用加速度计和陀螺仪实时获取姿态信息部分,将介绍数据采集与处理的方法、传感器数据的滤波与校准以及姿态解算算法的选择;随后,在绘制轨迹的方法及实现步骤介绍部分,将阐述坐标系建立与转换、轨迹重构方法的选择以及实验结果展示与分析;最后,在结论与展望中,对本文所做工作进行总结,并指出存在问题和可能的改进方向。
1.3 目的本文的目的是研究并提出一种利用加速度计和陀螺仪实现绘制轨迹的方法。
通过深入剖析这两种惯性传感器的原理和应用场景,以及数据采集与处理方法、姿态解算算法等关键步骤,本文旨在为读者提供一个全面而有效的方案。
同时,通过实验结果展示与分析,验证所提出方法的可行性和准确性,并对未来可能存在的问题进行探讨和展望。
2. 加速度计和陀螺仪简介2.1 加速度计原理加速度计是一种用于测量物体加速度的传感器。
它基于质量和牛顿第二定律的原理工作。
加速度计通常使用微小的弹簧和质量来测量物体所受到的加速度。
当一个物体加速时,弹簧和质量都会受到力的作用而发生位移。
通过测量弹簧位移来确定物体所受到的加速度。
最常见的类型是电容式加速度计,由两个电极和一个移动质点组成。
如何使用Matlab进行虚拟现实技术开发
如何使用Matlab进行虚拟现实技术开发虚拟现实(Virtual Reality,简称VR)技术正日益成为当今科技发展的热点,Matlab作为一种强大的科学计算和数据处理工具,在VR技术开发中也发挥着重要作用。
本文将介绍如何使用Matlab进行虚拟现实技术的开发。
一、VR技术简介虚拟现实技术是一种通过计算机生成的仿真环境,使用户感受到身临其境的感觉。
它通常通过头戴显示器等设备,让用户沉浸在虚拟的三维环境中,并能与该环境进行交互。
VR技术在游戏、医疗、教育等领域具有广阔的应用前景。
二、Matlab在VR技术开发中的优势Matlab是一种功能强大且易于使用的科学计算软件,它具有以下优势:首先,Matlab拥有丰富的图形处理和可视化功能,可以直观地展示虚拟环境的效果。
其次,Matlab提供了丰富的工具包和函数,可以方便地处理和分析三维数据。
最后,Matlab支持多种硬件设备的连接,并提供了丰富的接口,可以与VR设备进行交互。
三、使用Matlab创建虚拟环境在使用Matlab进行VR技术开发之前,首先需要安装相关的工具包。
Matlab提供了一系列用于创建虚拟环境的工具包,如Simulink 3D Animation、Virtual Reality Toolbox等。
这些工具包可以帮助开发者快速构建虚拟环境,并实现交互功能。
在创建虚拟环境时,我们可以通过Matlab提供的图形处理和可视化功能来绘制虚拟世界的模型和纹理。
同时,Matlab还提供了强大的物理仿真功能,可以为虚拟环境添加真实的物理效果,如重力、碰撞等。
通过组合这些功能,我们可以根据需要创建出各种逼真的虚拟环境。
四、使用Matlab实现VR交互功能VR技术的一个重要特点是能够与虚拟环境进行交互。
Matlab提供了丰富的接口和函数,方便开发者实现与VR设备的交互功能。
首先,我们可以利用Matlab的图像处理功能,实现虚拟环境对用户动作的识别。
例如,通过计算摄像头捕捉到的图像中的手势,来实现虚拟环境中的交互操作。
matlab mbse案例
matlab mbse案例MBSE(Model-Based Systems Engineering)是一种系统工程方法,它利用模型作为主要的工具来进行系统开发和分析。
在MATLAB 中,MBSE可以应用于各种工程领域,包括航空航天、汽车、电子和通信等。
以下是一些MATLAB MBSE案例的示例:1. 航空航天领域,在航空航天领域,MBSE可以用于设计和分析飞行器的系统。
MATLAB可以用于建立飞行器的动力学模型、控制系统设计和飞行器性能分析。
通过MBSE方法,工程师可以在MATLAB中建立系统模型,对飞行器的各个部分进行集成和分析,从而实现系统级别的工程设计和验证。
2. 汽车领域,在汽车工程领域,MBSE可以应用于汽车控制系统的设计和分析。
MATLAB可以用于建立汽车动力系统、车辆动力学模型和车辆控制系统。
通过MBSE方法,工程师可以在MATLAB中建立整个车辆系统的模型,进行系统级别的仿真和验证,从而提高汽车系统的设计效率和性能。
3. 电子和通信领域,在电子和通信领域,MBSE可以用于设计和分析各种电子设备和通信系统。
MATLAB可以用于建立电子设备的电路模型、通信系统的信号处理模型和通信协议的设计。
通过MBSE方法,工程师可以在MATLAB中建立整个电子设备和通信系统的模型,进行系统级别的仿真和验证,从而提高电子设备和通信系统的设计效率和性能。
总之,MATLAB在MBSE领域有着广泛的应用,可以帮助工程师进行系统级别的设计、分析和验证,提高工程设计的效率和性能。
这些案例只是MBSE在MATLAB中的应用的一小部分,实际上MBSE可以应用于各种工程领域,为工程师提供强大的工具和方法来进行系统工程设计和分析。
环绕模型的应用课件
情感分析
通过环绕模型,可以对文 本进行情感分析,判断文 本的情感倾向和情感强度 。
文本分类
利用环绕模型,可以对文 本进行分类,例如新闻分 类、邮件分类等。
文本生成
通过环绕模型,可以生成 自然语言文本,例如机器 翻译、自动摘要等。
生物信息学领域
基因序列分析
利用环绕模型,可以对基因序列 进行分析,例如基因表达、基因
环绕模型的特点和优势
特点
• 能够模拟物体周围的真实环境:环绕模型可以模拟出光线、空气等物质的分布情 况,从而模拟出物体周围的真实环境。
• 可以提高图形的真实感和质量:通过使用环绕模型,可以让计算机生成的图形更 加逼真,提高图形的质量和观感。
环绕模型的特点和优势
• 可以用于多种应用领域:环绕模型不仅可以用于计算机图形学 ,还可以用于虚拟现实、游戏开发等领域,具有广泛的应用前 景。
首先需要准备待处理的数据集, 可以通过读取文件、爬虫获取或
者接口对接等方式获取数据。
2. 数据清洗
对获取的数据进行清洗和处理, 如缺失值填充、异常值处理等,
以保证数据的质量和可用性。
使用Python实现环绕模型
01
3. 特征工程
根据业务需求对数据进行特征提取和转换,以更好地反映数据的规律和
特征。
02
可视化解释
03
针对解释性问题,可以通过可视化技术来增强模型的解释性和
理解性。
06
总结和展望
总结
1 2 3
环绕模型的基本概念
环绕模型是一种描述物体周围环境的方法,它涉 及到物体与周围物体之间的位置、距离、方向等 关系。
环绕模型的应用领域
环绕模型被广泛应用于机器人导航、场景理解、 目标跟踪等场景,帮助机器更好地感知和理解周 围环境。
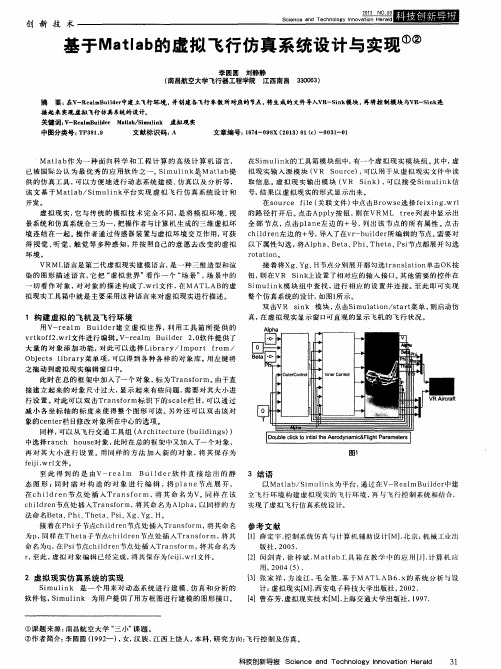
基于Matlab的虚拟飞行仿真系统设计与实现
象 的c e n t e r 栏目 修 改 对 象 所 在中心 的选 项 。 同样 , 可 以 从飞 行 交通 工具 组 ( Ar c h i t e c t u r e( b u i l d i n g s ) )
拟 现 实工具 箱 中就 是 主要 采 用这 种 语言 来 对 虚 拟现 实进 行 描 述 。
1 构 建 虚 拟 的 飞机 及飞 行 环境
用 V- r e a l m Bu i l d e r 建立虚 拟世界, 利 用 工具 箱 所 提 供 的 v r t k o f f 2 . Wr l 文 件进 行 编辑 。 V — r e a l m B u i l d e r 2 . O 软 件 提 供了
大量的对象添加 功能, 对此可以选择L i b r a r y /I mp o r t f r o m/ O b j e c t s l i b r a r y 菜单项 , 可 以得 到 各种 各 样 的 对 象 库 。 用 左 键将 之拖 动到 虚拟 现 实 编辑 窗 口中。 此时在总的框架中加入了一个对象 , 标为T r a n s f o r m。 由于直 接 建 立 起 来 的 对 象 尺寸 过 大 , 显示 起 来 有些 问 题 , 需 要对 其 大 小进 行设置。 对 此 可 以 双 击T r a n s f o r m标 识 下 的 s c a l e 栏 目, 可 以 通 过
境连结在一起。 操 作 者通 过传 感 器装 置 与虚 拟 环 境 交 互 作用 , 可 获 c hi l dr e n左 边 的 +号 , 导入 了在v r -b ui l de r 所 编辑 的 节点 。 需 要 对
matlab飞机轨迹代码
matlab飞机轨迹代码
编写飞机轨迹的 MATLAB 代码涉及许多复杂的数学和物理概念,这需要考虑飞机的速度、加速度、风阻等因素。
以下是一个简单的
示例,展示了如何使用 MATLAB 绘制一个简单的飞机轨迹。
matlab.
% 飞机轨迹示例代码。
% 飞机的初始位置。
x0 = 0;
y0 = 0;
% 飞机的速度和方向。
v = 100; % 假设飞机速度为100单位/时间。
theta = pi/4; % 假设飞机方向为45度(以弧度表示)。
% 飞机飞行的时间。
t = 0:0.1:10; % 假设飞行时间为10个时间单位,每0.1个时间单位取一个点。
% 飞机的轨迹方程。
x = x0 + v cos(theta) t; % 飞机的x坐标随时间变化。
y = y0 + v sin(theta) t; % 飞机的y坐标随时间变化。
% 绘制飞机轨迹。
plot(x, y, 'b-'); % 绘制飞机轨迹,线条颜色为蓝色。
xlabel('X 坐标'); % x轴标签。
ylabel('Y 坐标'); % y轴标签。
title('飞机轨迹'); % 图表标题。
这段代码创建了一个简单的飞机轨迹模拟,假设飞机以固定速度和方向飞行。
实际上,真实的飞机轨迹涉及更多复杂的因素,比如飞机的加速度、风速和风向等。
如果你需要更复杂的飞机轨迹模拟,你可能需要使用更复杂的数学模型和物理模拟来实现。
matlab geodetic2enu函数代码
文章标题:深入探讨MATLAB中的geodetic2enu函数代码在MATLAB中,geodetic2enu函数是用于执行大地坐标系到局部东-北-上(ENU)坐标系的转换的重要工具。
这个函数在地理空间数据处理和地图制图中有着广泛的应用,可以帮助用户将全球的地理坐标转换为局部坐标系,便于分析和可视化。
在本文中,我们将深入探讨MATLAB中的geodetic2enu函数代码,从简到繁地介绍其原理和用法,并共享我对这个主题的个人观点和理解。
一、MATLAB中的geodetic2enu函数简介MATLAB中的geodetic2enu函数是一个用于将大地坐标系(经纬度、高度)转换为局部ENU坐标系(东-北-上)的重要工具。
这个函数的基本语法为:[dx, dy, dz] = geodetic2enu(lat, lon, h, lat0, lon0, h0, spheroid)其中,lat、lon和h分别代表待转换的点的纬度、经度和高度,而lat0、lon0和h0则表示ENU坐标系的原点(参考点)的纬度、经度和高度。
spheroid参数表示使用的椭球体模型。
二、geodetic2enu函数的原理及用法1. 原理geodetic2enu函数的转换原理基于大地坐标系和ENU坐标系之间的数学关系,通过旋转和平移的方法将地球上的任意点转换为相对于参考点的局部坐标系。
这个过程涉及到大量的地理学和空间几何知识,但用户无需深入了解这些原理,只需要了解如何正确地使用这个函数进行坐标转换即可。
2. 用法在使用geodetic2enu函数时,用户需要提供待转换点的经纬度和高度信息,以及ENU坐标系的参考点信息和椭球体模型。
通过调用这个函数,就可以得到相对于参考点的局部坐标系下的坐标值,从而实现坐标的转换和定位功能。
三、个人观点和理解作为一名地理信息系统研究者,我对MATLAB中的geodetic2enu函数有着深刻的理解和使用经验。
matlab ecef2lv 例子
MATLAB是一种强大的数学计算软件,可以用于各种工程和科学领域的计算和仿真。
其中,ecef2lv函数是MATLAB中常用的一个函数,可以将地心地固坐标系(ECEF)的坐标转换为经纬度和高度(LLA)的坐标。
本文将通过一个例子来介绍如何使用MATLAB中的ecef2lv 函数进行坐标转换。
1. 准备工作在使用ecef2lv函数进行坐标转换之前,首先需要准备好ECEF坐标系下的坐标值。
ECEF坐标系是以地球质心为原点的坐标系,坐标值通常为三维直角坐标系下的x、y、z坐标。
2. 使用ecef2lv进行坐标转换在MATLAB命令窗口中输入以下代码,即可使用ecef2lv函数进行坐标转换:```matlabecef = [xxx, xxx, xxx]; 输入ECEF坐标值[lat, lon, alt] = ecef2lv(ecef); 调用ecef2lv函数进行坐标转换disp(['经度: ', num2str(lon)]);disp(['纬度: ', num2str(lat)]);disp(['高度: ', num2str(alt)]);```3. 分析结果经过ecef2lv函数的计算,我们得到了ECEF坐标对应的经度、纬度和高度值。
这些值可以用于地图上的定位和标注,以及其他地理信息系统中的应用。
4. 结论通过本例子的介绍,我们了解了如何使用MATLAB中的ecef2lv函数来进行地心地固坐标系和经纬度高度坐标系之间的转换。
这对于地理信息系统、航天航空领域等具有重要的应用意义,希望读者能够在实际工程中加以运用。
总结:通过本篇文章的介绍,我们对MATLAB中的ecef2lv函数有了更深入的了解,了解了它的基本用法和在实际工程中的应用。
希望本例子对读者有所帮助,谢谢阅读。
在实际工程中,地理信息系统(GIS)和导航系统常常需要进行坐标的转换和处理。
ECEF坐标系和经纬度高度坐标系是其中最常见的两种坐标系统,因此对它们之间的转换有着重要的需求。
模拟飞行游戏编程实现
模拟飞行游戏编程实现模拟飞行游戏是一种充满刺激和乐趣的虚拟体验,让玩家可以在现实世界中无法实现的场景中驾驶飞机。
它是通过计算机编程实现的,利用图形和物理仿真技术来模拟真实飞行场景和飞机操作。
本文将介绍模拟飞行游戏的编程实现过程,包括游戏引擎选择、飞行物理模拟、图形渲染等方面。
一、游戏引擎选择游戏引擎是实现模拟飞行游戏的核心工具。
目前市场上有多种成熟的游戏引擎可供选择,如Unity、Unreal Engine等。
在选择游戏引擎时需要考虑到其功能完备性、易用性、性能等因素。
其中,Unity是一款非常流行且功能强大的游戏引擎,它提供了丰富的2D和3D渲染功能,以及强大的物理引擎和动画系统,非常适合用于模拟飞行游戏的开发。
二、飞行物理模拟在模拟飞行游戏中,准确模拟飞机的物理行为是非常重要的。
飞行物理模拟包括飞机的姿态控制、操纵面控制、空气动力学模拟等。
通过计算飞行器的动力学方程和气动力学效应,可以实现真实的飞行体验。
在Unity中,可以利用物理引擎来实现飞机的物理模拟,例如利用Rigidbody组件来模拟飞机的运动,利用Collider组件来检测碰撞等。
三、图形渲染模拟飞行游戏的视觉效果对于玩家的沉浸感有着重要的影响。
图形渲染是实现逼真场景的关键技术之一。
在Unity中,可以利用其强大的渲染引擎来实现高品质的图形渲染。
可以利用Shader来实现光照效果、阴影效果等,利用贴图来增加细节,利用特效来增加场景的真实感等。
此外,还可以利用虚拟现实(VR)技术来提供更加沉浸式的飞行体验,使玩家感觉自己真的驾驶飞机飞行。
四、用户交互与控制模拟飞行游戏的用户交互与控制也是非常重要的。
玩家需要通过键盘、鼠标或者手柄等输入设备来控制飞机的姿态、飞行速度、舵面操纵等。
在编程实现时,可以通过监听输入设备的操作来控制飞机的运动。
同时,还可以通过编写UI界面来提供游戏设置、飞行计划等功能。
此外,还可以利用人工智能技术来实现虚拟敌人的智能控制,增加游戏的挑战性和趣味性。
matlab姿态解算
matlab姿态解算Matlab姿态解算是一种通过数学模型和算法,将传感器采集到的数据转化为姿态信息的技术。
姿态解算在航空航天、机器人、虚拟现实等领域具有重要的应用价值。
本文将介绍Matlab姿态解算的原理、方法和应用。
我们来了解姿态解算的概念。
姿态是指物体在空间中的方向和位置。
在三维空间中,姿态通常由欧拉角或四元数表示。
姿态解算的目标是根据传感器采集到的数据,推导出物体的姿态信息。
在Matlab中,姿态解算可以通过多种方法实现。
其中一种常用的方法是基于加速度计和陀螺仪的姿态解算。
加速度计可以测量物体在三个方向上的加速度,陀螺仪可以测量物体绕三个方向上的角速度。
通过对这些数据的处理和分析,可以推导出物体的姿态信息。
姿态解算的核心是将传感器数据转化为姿态信息的数学模型。
在Matlab中,可以使用旋转矩阵或四元数来表示姿态信息。
旋转矩阵是一个3x3的矩阵,可以表示物体在三维空间中的旋转变换。
四元数是一种复数扩展,可以用来表示旋转变换。
在Matlab中,可以使用一些现有的工具箱来实现姿态解算。
例如,可以使用Robotics System Toolbox中的函数来进行姿态解算。
这些函数提供了一些常用的姿态解算算法,例如扩展卡尔曼滤波(EKF)和互补滤波器。
除了基于加速度计和陀螺仪的姿态解算,还有其他一些方法可以用于姿态解算。
例如,可以使用磁力计来测量地球的磁场,从而推导出物体的方向信息。
还可以使用视觉传感器来获取物体在相机坐标系中的姿态信息。
姿态解算在许多领域具有广泛的应用。
在航空航天领域,姿态解算可以用于导航、飞行控制和目标跟踪等任务。
在机器人领域,姿态解算可以用于机器人的定位和路径规划。
在虚拟现实领域,姿态解算可以用于头部追踪和手部追踪等应用。
总结起来,Matlab姿态解算是一种通过数学模型和算法,将传感器采集到的数据转化为姿态信息的技术。
姿态解算在航空航天、机器人、虚拟现实等领域具有重要的应用价值。
MATLAB中常见的立体视觉技术介绍
MATLAB中常见的立体视觉技术介绍立体视觉技术是计算机视觉领域中的一项重要研究内容。
通过使用不同角度或位置的摄像机来获取场景的多个视点图像,然后通过对这些图像进行分析和处理,可以实现三维场景的重建和深度信息的获取。
MATLAB作为一款强大的科学计算软件,提供了丰富的工具和函数,可以用于立体视觉技术的研究和应用。
本文将介绍几种在MATLAB中常见的立体视觉技术,包括双目视觉、结构光、时间飞行三维成像以及基于深度学习的立体视觉等。
一、双目视觉双目视觉是指通过两个摄像机同时拍摄同一个场景,然后通过计算两个视点之间的视差来恢复场景的三维形状和深度信息。
MATLAB提供了一系列函数和工具箱,用于处理双目视觉相关的问题。
在使用双目视觉进行深度估计时,可以利用MATLAB中的图像配准和视差计算函数,例如'imregcorr'和'disparity'。
图像配准可用于将两个视点的图像对齐,然后计算视差图,通过视差图可以获取场景中的深度信息。
二、结构光结构光技术是一种通过投射光线或纹理来获取场景深度信息的方法。
MATLAB 提供了处理结构光图像的函数和工具。
例如,可以使用MATLAB中的计算机视觉工具箱中的函数'phaseunwrap'来处理结构光图像中的相位信息,从而获取场景的深度。
此外,MATLAB还提供了用于分析和可视化结构光图像的函数,例如'imshow'和'surf'等。
三、时间飞行三维成像时间飞行三维成像是一种通过测量光的飞行时间来获取场景深度信息的方法。
MATLAB可以用于处理时间飞行三维成像数据,提取深度信息并进行可视化。
例如,可以使用MATLAB中的图像处理函数和矩阵运算函数来处理时间飞行三维成像数据,例如'filter2'和'imshow'等。
通过这些函数的组合使用,可以实现对时间飞行三维成像数据的处理和分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB虚拟现实VR程序编写摘要MATLAB提供了强大的科学运算、灵活的程序设计流程、高质量的图形可视化与界面设计、便捷的与其他程序和语言接口的功能。
其语句书写简单、功能强大,而且提供很多面向解决应用问题的工具箱函数,是当今国际上科学界 (尤其是自动控制领域) 最具影响力、也是最有活力的软件。
虚拟现实技术也因其在各个领域的多方面应用已经同网络、多媒体并称为21世纪三大最具有前景的应用之一,是最近几年来国内外科技界关注的一大热点。
随着虚拟现实技术的发展,MATLAB也在日新月异的发展,不断完善功能,推出的虚拟现实工具箱就是与虚拟现实技术的接轨。
通过对MATLAB虚拟现实工具箱的研究,使用V-Realm Builder构建虚拟世界,在MATLAB环境下对虚拟对象进行简单的编程,来实现飞机绕大楼飞行的虚拟现实演示.演示结果充分说明了MATLAB的强大功能可以使具体应用问题的解决不必依靠复杂的编程即可实现,体现了虚拟现实技术的交互性及重要意义。
关键词:MATLAB 虚拟现实 VRMLABSTRACTMATLAB provides the formidable science operation, nimble programming flow, high grade graph visualization and Interface design, convenient functions with other procedures and language connection. MATLAB whose sentence writes simply but have powerful use, provides many tool case functions being geared to the needs of resolving application problems, It is now the most influence, and also the active software in scientific circles in international (particularly in automatic control domain). Virtual Reality technology is one of the most promising applications in 21 centuries with network and multi-media. Because of many applications in each field, it becomes a big hot spot which domestic and foreign scientific and technical circles attention for recent several years. With the development of Virtual Reality technology, MATLAB perfects a function unceasingly also in advancing with times, the Virtual Reality toolbox debuting is a meeting track with Virtual Reality technology .By the research to MATLAB Virtual Reality toolbox, learn using V-Realm Builder to structure the suppositional world, suppositional real carry out the simple programming on suppositional object, coming to realize an aircraft winding building flying under the environment in MATLAB demonstrates. Demonstrate result having explained that The MATLAB formidable function might cause the solution to the concrete application questions not to need to depend upon the complex programming then to realize, it has manifested the virtual reality technology interactive and the important meanings.Key words:MATLAB Virtual Reality VRML目录一前言 (1)二虚拟现实 (2)2.1虚拟现实简介 (2)2.2虚拟现实技术的发展意义 (2)2.3 VR虚拟现实技术的应用 (3)2.4 虚拟现实技术主要发展动向 (3)三 MATLAB介绍 (4)3.1 MATLAB的概况 (4)3.2 MATLAB产生的历史背景 (4)3.3 MATLAB的语言特点 (5)3.5 MATLAB虚拟现实工具箱的安装与设置 (6)3.6 MATLAB 虚拟现实语言--VRML简介 (6)3.7 MATLAB虚拟现实工具箱相关函数介绍 (7)四飞机绕大楼飞行的模拟实例 (7)4.1构建飞机绕大楼的虚拟世界 (7)4.1.1用V-realm Builder建立虚拟世界 (8)4.1.2添加对象 (9)4.1.3对所构造虚拟世界的对象的编程 (10)4.2飞机飞行轨迹的设想 (10)4.3在MATLAB下导入虚拟现实文件 (12)4.3.1飞机飞行姿态问题的考虑 (13)4.4仿真实现飞机绕大楼飞行 (14)五结论 (17)谢辞 (18)参考文献 (19)附录 (20)前言虚拟现实,英文名为 Virtual Reality ,简称 VR 技术。
它与传统的模拟技术完全不同,是将模拟环境、视景系统和仿真系统合三为一,把操作者与计算机生成的三维虚拟环境连结在一起。
操作者通过传感器装置与虚拟环境交互作用,可获得视觉、听觉、触觉等多种感知,并按照自己的意愿去改变“不随心”的虚拟环境。
作为一项尖端科技,虚拟现实集成了计算机图形技术、计算机仿真技术、人工智能、传感技术、显示技术、网络并行处理等技术的最新发展成果,是一种由计算机生成的高技术模拟系统。
这种技术的特点在于计算机产生一种人为虚拟的环境,这种虚拟的环境是通过计算机图形构成的三维数字模型,并编制到计算机中去生成一个以视觉感受为主,也包括听觉、触觉的综合可感知的人工环境,从而使得在视觉上产生一种沉浸于这个环境的感觉,可以直接观察、操作、触摸、检测周围环境及事物的内在变化,并能与之发生“交互”作用,使人和计算机很好地“融为一体”,给人一种“身临其境”的感觉。
在国外,美国是在VR技术方面最具权威性的国家。
利用虚拟现实技术设计波音777获得成功,是近几年来一件引起科技界瞩目的伟大成果。
日本在建立大规模VR知识库和虚拟现实的游戏方面做出了很大的成就。
欧洲一些国家也有重要成果。
在我国VR技术的发展起步于90年代初,目前已有多所研究中心和大学进行了这方面的研究。
在医学上,我国的“虚拟人”具有标准的人体选取和尸体处理办法,精密的人体切片密度和我国首创的人体结构染色技术。
这使得我国的“虚拟人”研究已走在世界前列。
北京科技大学钟延炯教授研制的VR-4的汽车驾驶模拟器是我国虚拟现实技术产品的典型代表。
虚拟现实技术的应用于2006年获得了重大突破,一款名为Second Life的网络游戏,以虚拟现实技术(Virtual Reality Technology)所构建的高度拟真体验,完全颠覆了人们对互联网的想象。
截止2006年12月,已经有300万人生活在这一虚拟世界中,且以每月20万名用户的速度增长,并成功吸引了全世界主流媒体的热捧。
人们已经发现,一个完全逼真的“虚拟世界”(Met averse)已经进入我们的生活,一种非同寻常的变化正在发生。
这次设计要完成的是通过对虚拟现实技术的了解,应用MATLAB的虚拟现实工具箱,来完成简单的编程,实现飞机绕大楼飞行的虚拟现实场景演示。
本次设计需要解决的问题主要是飞机的飞行轨迹和飞行中飞机的姿态。
虽然本次设计只是虚拟现实技术与MATLAB 结合的简单应用,但体现了MATLAB与时俱进的强大功能和虚拟现实技术的重要推广价值。
二虚拟现实2.1虚拟现实简介虚拟现实,也称虚拟实境或灵境,是一种可以创建和体验虚拟世界的计算机系统,它利用计算机技术生成一个逼真的、具有视、听、触等多种感知的虚拟环境,用户通过使用各种交互设备,同虚拟环境中的实体相互作用,使之产生身临其境感觉的交互式视景仿真和信息交流,是一种先进的数字化人机接口技术。
虚拟现实的三大特点是:沉浸度,交互性,想象力。
其中实质性特征的就是交互性。
因为虚拟现实技术是一种全新的人机交互方式,不是简单的图形显示,而是动态的三维立体空间,用户不仅可以看到虚拟现实里的对象,还可以操作其中的一些部分随人类的意志运动,让用户感受到真正的参与和产生满足感。
自从虚拟现实技术诞生以来,它已经在军事模拟、先进制造、城市规划/地理信息系统、医学生物等领域中显示出巨大的经济、军事和社会效益,与网络、多媒体并称为21世纪最具应用前景的三大技术。
2.2虚拟现实技术的发展意义现在,迅速发展的计算机硬件、软件系统使得基于大型数据集合的声音和图像的实时动画制作成为可能,越来越多的新颖、实用的输入输出设备相继进入市场,而人机交互系统的设计也在不断创新,这些都为虚拟现实系统的发展打下了良好的基础。
从萌芽到今天的日渐成熟,虚拟现实技术的发展也经历了风风雨雨。
它在各个方面的应用日益改变着人类的工作、生活和学习环境,使得数据与程序的交流更为简单和广泛。
但到目前为止这些还只是初步应用,相信在以后虚拟现实技术会得到更好的发展,为人类社会做出更大的贡献。
展望未来5年虚拟现实将与人类更加贴近,给予虚拟现实的服务项目日趋多元化。
而在虚拟现实的应用领域,基于互联网的应用将爆发前所未有的爆发力。
而虚拟现实融合语音智能将为虚拟现实的网络平台插上飞翔的翅膀。
2.3虚拟现实的各种应用随着虚拟现实技术的发展,它的应用领域也得到了很大的扩展,已经不仅仅是应用于游戏和主题公园方面,在医学,建筑,军事,航空航天,网络教学及电影制作等方面也有了重要的应用。