选主元LU分解过程中的步骤
矩阵化简的方法技巧
矩阵化简的方法技巧
矩阵化简是一种常见的数学操作,用于简化矩阵的表示和计算。
下面介绍几种常用的矩阵化简方法技巧:
高斯消元法
高斯消元法是一种基本的矩阵化简方法,适用于解线性方程组
和计算矩阵的逆等。
其步骤如下:
1. 使用初等行变换,将矩阵转化为上三角矩阵。
2. 使用回代法,求解上三角矩阵对应的线性方程组。
列主元高斯消元法
列主元高斯消元法是对高斯消元法的改进,能够提高矩阵化简
的准确性。
其步骤如下:
1. 在每一列中选择绝对值最大的元素作为主元。
2. 使用初等行变换,将矩阵转化为上三角矩阵。
3. 使用回代法,求解上三角矩阵对应的线性方程组。
LU分解法
LU分解法是一种将矩阵分解为下三角矩阵和上三角矩阵的方法,可以简化矩阵计算。
其步骤如下:
1. 使用初等行变换,将矩阵化为上三角矩阵。
2. 将上三角矩阵中的主元移到对角线上得到上三角矩阵U。
3. 将初等行变换的逆操作应用到单位矩阵得到下三角矩阵L。
特征值分解法
特征值分解是一种将矩阵分解为特征值和特征向量的方法,可以简化矩阵计算和求解线性方程组。
其步骤如下:
1. 求解矩阵的特征值。
2. 求解每个特征值对应的特征向量。
3. 组成特征值矩阵和特征向量矩阵。
以上是矩阵化简的几种常用方法技巧,根据不同的需求和实际情况,可以选择合适的方法来进行矩阵化简操作。
数值分析高斯顺序消去法、列主元消去法LU分解法

数值分析实验报告(1)学院:信息学院班级:计算机0903班姓名:***学号:********课题一A.问题提出给定下列几个不同类型的线性方程组,请用适当的方法求解线性方程组1、设线性方程组⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--------------------------1368243810041202913726422123417911101610352431205362177586832337616244911315120130123122400105635680000121324⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡10987654321x x x x x x x x x x =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-2119381346323125 x *= ( 1, -1, 0, 1, 2, 0, 3, 1, -1, 2 )T2、设对称正定阵系数阵线方程组⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------------19243360021411035204111443343104221812334161206538114140231212200420424⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡87654321x x x x x x x x = ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---4515229232060 x * = ( 1, -1, 0, 2, 1, -1, 0, 2 )T3、三对角形线性方程组⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------------------4100000000141000000001410000000014100000000141000000001410000000014100000000141000000001410000000014⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡10987654321x x x x x x x x x x = ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----5541412621357 x *= ( 2, 1, -3, 0, 1, -2, 3, 0, 1, -1 )TB.(1)对上述三个方程组分别用Gauss 顺序消去法与Gauss 列主元消去法;平方根 与改进平方根法;追赶法求解(选择其一) (2)编写算法通用程序(3)在应用Gauss 消去时,尽可能利用相应程序输出系数矩阵的三角分解式C.(1)通过该课题的程序编制,掌握模块化结构程序设计方法 (2)掌握求解各类线性方程组的直接方法,了解各种方法的特点 (3)体会高斯消去法选主元的必要性 实验步骤:(高斯消去法,列主元,LU )1顺序高斯消去法2.LU 分解法3.列主元高斯消去法(如下图)(1)高斯消去法运行结果如下(2)对方程的系数矩阵进行LU分解并求出方程组的解(3)列主元高斯消去法实验体会总结:利用gauss消去法解线性方程组的时候,如果没有经过选主元,可能会出现数值不稳定的现象,使得方程组的解偏离精确解。
数值分析LU分解和列主消元法——董安葳
数值分析第六次实验报告姓名:董安葳学号:5123119题目:LU分解和列主消元法。
实验方法:本人根据课本中的两种算法——LU分解和列主消元法,独自编写代码,实现了两种算法。
并利用两种算法分别实现了课本中的计算实习第一题。
实验过程:1.LU.mfunction [L,U,x]=LU(A,b)[m,n]=size(A);L=zeros(m,m);temp=0;for ii=1:mfor jj=ii+1:mtemp=A(jj,ii)/A(ii,ii);L(jj,ii)=temp;for kk=ii:mA(jj,kk)=A(jj,kk)-A(ii,kk)*temp;endb(jj,1)=b(jj,1)-b(ii,1)*temp;endendfor ii=1:mL(ii,ii)=1;endU=A;x=zeros(m,1);x(m,1)=b(m,1)/U(m,m);sum=0;for ii=m-1:-1:1sum=0;for jj=ii+1:msum=sum+U(ii,jj)*x(jj,1);endx(ii,1)=(b(ii,1)-sum)/U(ii,ii);end2.Liezhuyaunxiaoqu.mfunction [x,det]=liezhuyaunxiaoqu(A,b)[m,n]=size(A);det=1;temp=0;h=0;l=0;temp1=0;temp2=0;for k=1:n-1po=zeros(n-k+1,1);qq=1;for pp=k:npo(qq,1)=A(pp,k);qq+1;endtemp=max(abs(po));if temp==0error('系数矩阵行列式的值为零,该方程无解!') end[h,l]=find(temp==abs(po));if h+k-1~=kfor jj=k:ntemp1=A(h+k-1,jj);A(h+k-1,jj)=A(k,jj);A(k,jj)=temp1;endtemp1=b(k,1);b(k,1)=b(h+k-1,1);b(h+k-1,1)=temp1;det=-det;endfor jjj=k+1:ntemp2=A(jjj,k)/A(k,k);for kk=k:nA(jjj,kk)=A(jjj,kk)-A(k,kk)*temp2;endb(jjj,1)=b(jjj,1)-b(k,1)*temp2;enddet=A(k,k)*det;endif A(m,m)==0error('系数矩阵行列式的值为零,该方程无解!') endx=zeros(m,1);x(m,1)=b(m,1)/A(m,m);sum=0;for iii=m-1:-1:1sum=0;for jj=iii+1:msum=sum+A(iii,jj)*x(jj,1);endx(iii,1)=(b(iii,1)-sum)/A(iii,iii);enddet=A(n,n)*det;实验截图:LU分解算法:列主消元法。
LU分解法
具体的计算结果比较,取一正定对称矩阵,比较不 同算法 的结果,以及考虑稀疏和不考虑稀疏计算 时间的差别。
lu分解法是直接分解法中的一种算法将方程组axb中的稀疏矩阵a分解为一个上三角矩阵和一个下三角矩阵其中alu令yux那么在方程租的运算中可以先解lyb再解uxy在编程过程中分两步进行先对矩阵a进行lu分解然后再解方程组由lua及对l和u的要求可以得到分解的计算公式
LU分解法
线性方程组的解法通常分为两大类:直接接法和 迭代解法。
直接法是在没有舍入误差的情况下,通过有限步 四则运算可以求得方程组。但是,在实际计算时, 由于初始数据变为机器数而产生的误差以及计算 过程中所产生的舍入误差等都对解的精确度产生 影响,因此直接法实际上也只能算出方程组真解 的近似值。
目前较实用的直接法是高斯消去法和一些变形,例 如选主元的高斯消去法和矩阵的三角分解法,它们 都是目前计算机上常用的有效方法。直接法的优点 是计算量小,可事先估计,缺点是所需存贮单元较 多,编写程序较复杂,计算程序所需时间较长。
n2 11 12 13 21 31 22 23 32 33
u u U
(n-1)n nn
1n 2n
3n
…
n1
…
n3
…
a a
…
n2
a … a
nn
LU分解的函数程序为
• • • • • • • • • • • • • • function [L,U]=LU(A) r=length(A(1,:)) x=zeros(r,1) m=zeros(r,r) for i=1:r-1 for j=i+1:r m(j,i)=A(j,i)/A(i,i) for k=i:r A(j,k)=A(j,k)-m(j,i)*A(i,k) end end end L=m+eye(r) U=A
部分主元法lu分解
部分主元法lu分解
部分主元法(Partial Pivot LU Decomposition)是一种用于LU 分解的数值算法。
它的目的是通过交换矩阵的行来选取每一步中的主元素,从而减小误差,提高计算的准确性。
LU分解是一种将一个矩阵分解为下三角矩阵L和上三角矩阵U的过程。
在部分主元法中,首先选取矩阵中第一列的绝对值最大的元素作为第一个主元,利用它进行消元操作,将其所在的行交换到矩阵的第一行。
然后,用该主元将第一列中其他元素消为零,并得到第一行的部分主元列。
接下来,选取第二列第二行格,再选取第三列第三行格,以此类推。
最后得到的下三角矩阵L和上三角矩阵U即为LU分解的结果。
部分主元法的优点是能够提高计算结果的准确性,尤其在处理接近奇异或接近奇异矩阵的情况下。
缺点是它的计算复杂度较高,涉及到行交换操作,增加了计算的时间和空间复杂度。
总之,部分主元法是一种利用主元元素来进行LU分解的数值算法,它能提高计算结果的准确性,但计算复杂度较高。
高斯列主元消去法和直接三角分解法(LU分解)

实验六高斯列主元消去法和直接三角分解法(LU分解)一、实验名称:分别用高斯列主元消去法和直接三角分解法(LU分解)求方程组的解系数矩阵:10 7 8 7 常向量:107 5 6 5 88 6 10 9 67 5 9 10 7精确解为:(-60,102,-27,16)二、试验目的:分别用高斯列主元消去法和直接三角分解法(LU分解)求方程组的解,比较二者不同的特点。
三、算法描述:2、直接三角分解法(LU分解)四、源程序:1、高斯列主元消去法#include <stdio.h>void main(){float a[4][4]={{10,7,8,7},{7,5,6,5},{8,6,10,9},{7,5,9,10}}, y[4],c[4][4],x[4],d[4],m,b; int i,n,j,f;printf("请输入右端项:\n");for(i=0;i<=3;i++)scanf("%f",&y[i]);for(n=0;n<=2;n++){ m=a[n][n]; f=n;for(i=(n+1);i<=3;i++){if(m<a[i][n]){m=a[i][n]; f=i;}}if(f!=n){for(j=0;j<=3;j++){c[n][j]=a[n][j]; a[n][j]=a[f][j];a[f][j]=c[n][j];}d[n]=y[n]; y[n]=y[f]; y[f]=d[n];}for(i=(n+1);i<=3;i++){b=-a[i][n]/a[n][n];for(j=0;j<=3;j++)a[i][j]=a[n][j]*b+a[i][j];y[i]=y[n]*b+y[i];}}x[3]=y[3]/a[3][3];x[2]=(y[2]-a[2][3]*x[3])/a[2][2];x[1]=(y[1]-a[1][3]*x[3]-a[1][2]*x[2])/a[1][1];x[0]=(y[0]-a[0][3]*x[3]-a[0][2]*x[2]-a[0][1]*x[1])/a[0][0];printf("x1的值为%f\nx2的值为%f\nx3的值为%f\nx4的值为%f\n",x[0],x[1],x[2],x[3]);}2、直接三角分解法(LU分解)#include <stdio.h>void main (){float a[4][4]={{10,7,8,7},{7,5,6,5},{8,6,10,9},{7,5,9,10}},y[4], l[4][4],x[4],u[4][4],b[4]; int i,n,j;printf("请输入右端项:");for(i=0;i<=2;i++)scanf ("%f",&b[i]);for (i=0;i<=3;i++){ u[0][i]=a[0][i];l[i][0]=a[i][0]/u[0][0];}for (n=1;n<=2;n++){for(j=0;j<=(3-n);j++){u[n][n+j]=a[n][n+j];for (i=0;i<n;i++)u[n][n+j]=u[n][n+j]-l[n+j][i]*u[i][n]; }if (n=1){l[2][1]=(a[2][1]-l[2][0]*u[0][1])/u[1][1]; l[3][1]=(a[3][1]-l[3][0]*u[0][1])/u[1][1]; } else if (n=2){l[3][2]=(float)(a[3][2]-l[3][0]*u[0][2]-l[3][1]*u[1][2])/u[2][2]; } }for (n=0;n<=3;n++){y[n]=b[n];for (i=0;i<n;i++)y[n]=y[n]-l[n][i]*y[i]; }for (n=3;n>=0;n--){x[n]=y[n];for (i=3;i>n;i--)x[n]=(x[n]-u[n][i]*x[i]);x[n]=x[n]/u[n][n]; }for(i=0;i<=3;i++)printf("x%d的的值为:%f\n",i+1,x[i]); }五、输出结果1、高斯列主元消去法(1)请输入右端项:10 8 6 7X1的值为-59.999584X1的值为101.999306X1的值为-26.999817X1的值为15.999890(2)请输入右端项:5 6 7 8X1的值为-98.999306X1的值为163.998840X1的值为-40.999695X1的值为24.999817六、对算法的理解和改进改变右端项会对结果产生明显的影响,高斯列主元消去法仅考虑依次按列选取主元素,然后按行使之变到主元位置,再进行消去运算,消元结果冲掉A,计算解X冲掉常数项b,则在计算过程中由于右端项的不同解必然不同。
lu分解追赶法
lu分解追赶法我们先来了解一下什么是"lu分解追赶法"。
它是一种用于求解线性方程组的数值计算方法。
通常我们会遇到类似于Ax=b的线性方程组,其中A是一个n×n的矩阵,x和b分别是n维向量。
而lu分解追赶法就是将矩阵A分解为一个下三角矩阵L和一个上三角矩阵U的乘积,即A=LU,然后通过追赶法求解这个分解后的方程组。
那么,如何进行lu分解呢?首先,我们需要将矩阵A进行行变换,使得其主元(即对角线上的元素)都不为0。
然后,我们可以通过高斯消元法来将矩阵A转化为一个上三角矩阵U,同时记录下所做的行变换操作。
接着,我们就可以通过这些行变换操作来构建下三角矩阵L,使得A=LU成立。
接下来,我们来看一下如何使用追赶法求解分解后的方程组。
假设我们已经得到了LU分解,即A=LU。
我们可以首先解Ly=b,得到向量y,然后再解Ux=y,得到我们想要的解x。
在解Ly=b的过程中,我们可以使用前向追赶法,而在解Ux=y的过程中,我们可以使用后向追赶法。
通过这样的追赶法,我们可以高效地求解出线性方程组的解。
那么,lu分解追赶法有什么应用呢?它在科学计算领域有着广泛的应用。
例如,在工程领域中,我们经常需要求解大规模的线性方程组,而使用直接求解方法的复杂度很高。
而lu分解追赶法可以将复杂度降低到O(n^2),大大提高了计算效率。
此外,lu分解追赶法还可以用于求解矩阵的逆、计算行列式等问题。
总结一下,lu分解追赶法是一种用于求解线性方程组的数值计算方法。
通过将矩阵A分解为下三角矩阵L和上三角矩阵U的乘积,然后使用追赶法求解分解后的方程组,我们可以高效地求解线性方程组的解。
lu分解追赶法在科学计算中具有重要的应用价值,可以大大提高计算效率。
lu分解 部分选主元 索引向量
lu分解部分选主元索引向量LU分解是一种矩阵分解的方法,将一个矩阵分解为两个矩阵的乘积。
LU分解的全称为LU分解是“Lower-Upper decomposition”(下-上分解)的缩写。
在LU分解中,原始矩阵被分解为一个下三角矩阵(L矩阵)和一个上三角矩阵(U矩阵)相乘的形式。
在进行LU分解的过程中,我们可以使用部分选主元的方法来选取主元,以提高LU分解的稳定性和精度。
LU分解可以在求解线性方程组、矩阵求逆等问题中起到重要的作用。
通过LU分解,我们可以将原始的复杂的线性方程组转化为两个简单的线性方程组的求解问题。
部分选主元是在进行LU分解的过程中,通过选取合适的主元元素,可以避免在计算过程中出现误差累积和矩阵奇异性导致的计算失败。
在部分选主元方法中,我们会选取每一列中绝对值最大的元素作为主元,并且将选取的主元元素所在的行交换到当前操作行的位置。
这样可以确保主元元素始终是当前操作行中的最大元素,从而提高LU分解的稳定性和精度。
在进行LU分解的过程中,我们需要采取逐列进行操作的方式。
首先,我们将原始的矩阵A进行LUP分解,得到一个置换矩阵P、一个下三角矩阵L和一个上三角矩阵U。
具体的步骤如下:1.初始化置换矩阵P为单位矩阵,下三角矩阵L和上三角矩阵U均为0矩阵。
2.对于第i列(i=1到n),进行以下操作:-使用部分选主元的方法选择主元元素,并将其所在行交换到当前操作行的位置。
-将选取的主元元素所在行作为L矩阵的第i行,将当前操作行作为U矩阵的第i行。
-对于当前操作行的下面的行,计算L矩阵的第j行(j=i+1到n)和U矩阵的第j行(j=i+1到n)。
-计算L矩阵的第j行:将U矩阵的第j行除以选取的主元元素,并将结果作为L矩阵的第j行。
-计算U矩阵的第j行:将U矩阵的第j行减去L矩阵的第j行乘以选取的主元元素。
3.返回得到的置换矩阵P、下三角矩阵L和上三角矩阵U。
通过部分选主元的方法进行LU分解,可以提高LU分解的稳定性和精度。
矩阵求逆的几种方法总结(C++)

矩阵求逆的⼏种⽅法总结(C++)矩阵求逆运算有多种算法:1. 伴随矩阵的思想,分别算出其伴随矩阵和⾏列式,再算出逆矩阵;2. LU分解法(若选主元即为LUP分解法: Ax = b ==> PAx = Pb ==>LUx = Pb ==> Ly = Pb ==> Ux = y,每步重新选主元),它有两种不同的实现;A-1=(LU)-1=U-1L-1,将A分解为LU后,对L和U分别求逆,再相乘;通过解线程⽅程组Ax=b的⽅式求逆矩阵。
b分别取单位阵的各个列向量,所得到的解向量x就是逆矩阵的各个列向量,拼成逆矩阵即可。
下⾯是这两种⽅法的c++代码实现,所有代码均利⽤常规数据集验证过。
⽂内程序旨在实现求逆运算核⼼思想,某些异常检测的功能就未实现(如矩阵维数检测、矩阵奇异等)。
注意:⽂中A阵均为⽅阵。
伴随矩阵法C++程序:1 #include <iostream>2 #include <ctime> //⽤于产⽣随机数据的种⼦34#define N 3 //测试矩阵维数定义56//按第⼀⾏展开计算|A|7double getA(double arcs[N][N],int n)8 {9if(n==1)10 {11return arcs[0][0];12 }13double ans = 0;14double temp[N][N]={0.0};15int i,j,k;16for(i=0;i<n;i++)17 {18for(j=0;j<n-1;j++)19 {20for(k=0;k<n-1;k++)21 {22 temp[j][k] = arcs[j+1][(k>=i)?k+1:k];2324 }25 }26double t = getA(temp,n-1);27if(i%2==0)28 {29 ans += arcs[0][i]*t;30 }31else32 {33 ans -= arcs[0][i]*t;34 }35 }36return ans;37 }3839//计算每⼀⾏每⼀列的每个元素所对应的余⼦式,组成A*40void getAStart(double arcs[N][N],int n,double ans[N][N])41 {42if(n==1)43 {44 ans[0][0] = 1;45return;46 }47int i,j,k,t;48double temp[N][N];49for(i=0;i<n;i++)50 {51for(j=0;j<n;j++)52 {53for(k=0;k<n-1;k++)54 {55for(t=0;t<n-1;t++)56 {57 temp[k][t] = arcs[k>=i?k+1:k][t>=j?t+1:t];58 }59 }606162 ans[j][i] = getA(temp,n-1); //此处顺便进⾏了转置63if((i+j)%2 == 1)64 {65 ans[j][i] = - ans[j][i];66 }67 }68 }69 }7071//得到给定矩阵src的逆矩阵保存到des中。
矩阵的lu分解的计算步骤
矩阵的lu分解的计算步骤
矩阵的 LU 分解是指将一个矩阵 A 分解成一个下三角矩阵 L 和一个上三角矩阵 U,即 A=LU,其中 L 的对角线元素为 1。
LU 分解的计算步骤如下:
Step 1: 选取主元
选取主元可以是部分选主元或者完全选主元。
部分选主元每次选取一列中绝对值最大的元素作为主元,而完全选主元则是每次在全矩阵中选取绝对值最大的元素作为主元。
选取主元的目的是为了在后面的计算过程中减少误差。
Step 2: 消元
进行初等行变换,通过加减倍数的方式将矩阵 A 化为上三角矩阵 U。
同时对于每个主元所在的列,将其下面的元素通过加减倍数的方式消为零。
消元的过程中需要记录每一步所对应的初等矩阵,利用初等矩阵可以还原出矩阵 L。
Step 3: 矩阵 L 的求解
根据步骤 2 中记录的初等矩阵,利用反向代替法求解矩阵 L。
反向代替法是指先求解 L 的下面一行,然后再带入上面一行的求解式中求解。
总结
LU 分解可以大大简化矩阵求解的过程。
在进行 LU 分解的过程中需要注意选取主元的方式,万一选取的主元不合适,就可能导致误差的累计。
因此,选取主元往往是 LU 分解最为关键的一步。
解线性方程组的列主元素高斯消去法和lu分解法
数值试验报告分析一、实验名称:解线性方程组的列主元素高斯消去法和LU 分解法二、实验目的及要求:通过数值实验,从中体会解线性方程组选主元的必要性和LU 分解法的优点,以及方程组系数矩阵和右端向量的微小变化对解向量的影响。
三、算法描述:本次试验采用的是高斯列主元消去法和LU 分解法求解线性方程组的解。
其中,高斯消去法的基本思想是避免接近于零的数作分母;能进行到底的条件:当A 可逆时,列主元Gauss(高斯)消去法一定能进行到底。
优点:具有很好的数值稳定性;具有与顺序Gauss 消去法相同的计算量。
列主元Gauss(高斯)消去法的精度显著高于顺序Gauss(高斯)消去法。
注意:省去换列的步骤,每次仅选一列中最大的元。
矩阵的三角分解法是A=LU,L 是下三角阵,U 是上三角阵,Doolittle 分解:L 是单位下三角阵,U 是上三角阵;Crout 分解:L 是下三角阵,U 是单位上三角阵。
矩阵三角分解的条件 是矩阵A 有唯一的Doolittle 分解的充要条件是A 的前n-1顺序主子式非零;矩阵A 有唯一的Crout 分解的充要条件是A 的前n-1顺序主子式非零。
三角分解的实现是通过(1)Doolittle 分解的实现; (2)Doolittle 分解的缺点:条件苛刻,且不具有数值稳定性。
(3)用Doolittle 分解求解方程组: AX=b LUX=b LY=bA=LU UX=Y ;四、实验内容:解下列两个线性方程组(1) ⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎭⎫ ⎝⎛--11134.981.4987.023.116.427.199.103.601.3321x x x (2) ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎭⎫ ⎝⎛----15900001.582012151526099999.23107104321x x x x a 、用你熟悉的算法语言编写程序用列主元高斯消去法和LU 分解求解上述两个方程组,输出Ax=b 中矩阵A 及向量b, A=LU 分解的L 及U ,detA 及解向量x.b 、将方程组(1)中系数3.01改为3.00,0.987改为0.990,用列主元高斯消去法求解变换后的方程组,输出列主元行交换次序,解向量x及detA,并与(1)中结果比较。
三角分解法lu例题
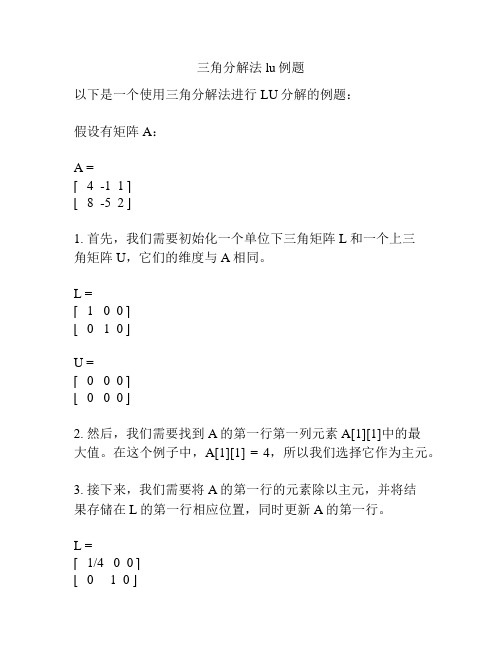
三角分解法lu例题以下是一个使用三角分解法进行LU分解的例题:假设有矩阵A:A =⌈ 4 -1 1 ⌉⌊ 8 -5 2 ⌋1. 首先,我们需要初始化一个单位下三角矩阵L和一个上三角矩阵U,它们的维度与A相同。
L =⌈ 1 0 0 ⌉⌊ 0 1 0 ⌋U =⌈ 0 0 0 ⌉⌊ 0 0 0 ⌋2. 然后,我们需要找到A的第一行第一列元素A[1][1]中的最大值。
在这个例子中,A[1][1] = 4,所以我们选择它作为主元。
3. 接下来,我们需要将A的第一行的元素除以主元,并将结果存储在L的第一行相应位置,同时更新A的第一行。
L =⌈ 1/4 0 0 ⌉⌊ 0 1 0 ⌋U =⌈ 4 -1 1 ⌉⌊ 8 -5 2 ⌋4. 然后,我们需要将A的第一列的元素存储在U的第一列相应位置,并将A的第一列的元素减去L的第一行适当位置上的元素的乘积,并将结果存储在A的对应位置。
L =⌈ 1/4 0 0 ⌉⌊ 2 1 0 ⌋U =⌈ 4 -1 1 ⌉⌊ 0 -3/2 1/2⌋5. 接下来,我们继续对A的第二行第二列元素A[2][2]进行相同的操作。
L =⌈ 1/4 0 0 ⌉⌊ 2/4 1 0 ⌋U =⌈ 4 -1 1 ⌉⌊ 0 -3/2 1/2⌋6. 最后,我们对A的第二列的元素进行相同的操作。
L =⌈ 1/4 0 0 ⌉⌊ 2/4 1 0 ⌋U =⌈ 4 -1 1 ⌉⌊ 4 -4 0 ⌋所以,A的LU分解结果为: L =⌈ 1/4 0 0 ⌉⌊ 2/4 1 0 ⌋U =⌈ 4 -1 1 ⌉⌊ 4 -4 0 ⌋。
主对角全是0的矩阵lu分解
主对角全是0的矩阵lu分解
LU分解是一种矩阵分解的方法,它将一个矩阵分解为一个下三角矩阵(L)和一个上三角矩阵(U)的乘积。
这种分解在数值线性代数中非常重要,因为它可以用来解决线性方程组、计算行列式和矩阵的逆等问题。
然而,当矩阵的主对角线上全是0时,LU分解会遇到一些特殊的问题。
在LU分解中,我们通常希望L矩阵的对角线元素全为1,而U矩阵的对角线元素就是原矩阵的对角线元素。
但当原矩阵的对角线元素全为0时,U矩阵的对角线元素也将全为0,这会导致U矩阵不可逆,因为可逆矩阵的对角线元素不能全为0。
为了处理这种情况,我们需要对LU分解进行一些修改。
一种常见的方法是使用部分选主元LU分解(Partial Pivoting LU Decomposition),它在分解过程中会交换行和列,使得U矩阵的对角线元素尽可能不为0。
这种方法虽然可以解决对角线元素为0的问题,但可能会增加计算的复杂性和不稳定性。
另一种方法是使用带有行交换的LU分解(LU Decomposition with Row Exchanges),它允许在分解过程中交换行,以确保U矩阵的对角线元素不为0。
这种方法虽然可以解决对角线元素为0的问题,但会使得L矩阵不再是一个下三角矩阵,而是一个具有单位对角线和一些额外行交换的下三角矩阵。
总的来说,当矩阵的主对角线上全是0时,LU分解会遇到一些特殊的问题,需要使用一些特殊的技巧来处理。
虽然这些技巧可以解决问题,但可能会增加计算的复杂性和不稳定性,因此在实际应用中需要谨慎使用。
实验五 矩阵的LU分解法

实验五 矩阵的LU 分解法一、目的与要求:熟悉求解线性方程组的有关理论和方法;会编制列主元消去法、LU 分解法、雅可比及高斯—塞德尔迭代法德程序;通过实际计算,进一步了解各种方法的优缺点,选择合适的数值方法。
二、 实验内容:会编制列主元消去法、LU 分解法、雅可比及高斯—塞德尔迭代法德程序,进一步了解各种方法的优缺点。
三、 程序与实例列主元高斯消去法算法:将方程用增广矩阵[A ∣b ]=(ij a )1n (n )+⨯表示1) 消元过程对k=1,2,…,n-1①选主元,找{}n ,,1k ,k i k +∈使得k ,i k a =ik a ni k max ≤≤②如果0a k ,i k =,则矩阵A 奇异,程序结束;否则执行③。
③如果k i k ≠,则交换第k 行与第k i 行对应元素位置,j i kj k a a ↔ j=k,┅,n+1④消元,对i=k+1, ┅,n 计算kk ik ik a a l /=对j=l+1, ┅,n+1计算kj ik ij ij a l a a -=2) 回代过程①若0=nn a ,则矩阵A 奇异,程序结束;否则执行②。
②nn n n n a a x /1,+=;对i=n-1, ┅,2,1,计算ii ni j j ij n i i a x a a x /11,⎪⎪⎭⎫ ⎝⎛-=∑+=+程序与实例例1 解方程组⎪⎩⎪⎨⎧=++-=++-=++035.3643x .5072x .1835x .2137.2623x .43712x 347x .1 1.1833.555x 2.304x 0.101x 321321321输出结果如下:X[0]=-0.398234X[1]= 0.013795X[2]= 0.335144程序如下:#include<stdio.h>#include<math.h>main(){int i,j,p,o,l,q;double a[3][4]={{0.101,2.304,3.555,1.183},{-1.347,3.712,4.623,2.137},{-2.835,1.072,5.643,3.035}};double x[3],z[4];printf("列主元消去法\n");for(j=0;j<2;j++){for(i=j+1;i<3;i++){if(fabs(a[j][j])<fabs(a[i][j])){for(p=0;p<4;p++){z[p]=a[j][p];a[j][p]=a[i][p];a[i][p]=z[p];}/*交换得最大主元*/}}for(l=j+1;l<3;l++){for(q=3;q>=j;q--){a[l][q]=(a[l][q]-(a[l][j]/a[j][j])*a[j][q]);}}printf("进行消去:\n");for(o=0;o<3;o++){for(p=0;p<4;p++){printf("%12.6f",a[o][p]);}printf("\n");}}x[2]=a[2][3]/a[2][2];x[1]=(a[1][3]-x[2]*a[1][2])/a[1][1];x[0]=(a[0][3]-x[2]*a[0][2]-x[1]*a[0][1])/a[0][0];printf("最后的解:\n");for(i=0;i<3;i++){printf("x[%d]=%12.6f\n",i,x[i]);} } 结果如下:例2 解方程组⎪⎪⎪⎩⎪⎪⎪⎨⎧=++++=++++=++++=++++=++++-12.041.0F 1.02E 3.47D 1.04C 3.54B -6.301.0F2.01E 2.51D 4.04C 5.05B -8.531.0F 1.21E 2.92D 1.46C3.53B -20.071.0F 1.10E4.48D 1.21C 4.93B -32.041.0F 1.55E5.66D 2.40C 8.77B计算结果如下B=-1.161954C= 1.458125D=-6.004824E=-2.209018F= 14.719421程序如下:#include<stdio.h>#include<math.h>void main(void){int i,j,p,o,l,q;double a[5][6]={{8.77,2.40,5.66,1.55,1.0,-32.04},{4.93,1.21,4.48,1.10,1.0,-20.07},{3.53,1.46,2.92,1.21,1.0,-8.53},{5.05,4.04,2.51,2.01,1.0,-6.30},{3.54,1.04,3.47,1.02,1.0,-12.04}};double x[5],z[6];printf("列主元消去法求五元一次方程组:\n");for(j=0;j<4;j++){for(i=j+1;i<5;i++){if(fabs(a[j][j])<fabs(a[i][j])){for(p=0;p<6;p++){z[p]=a[j][p];a[j][p]=a[i][p];a[i][p]=z[p];}/*交换得最大主元*/}}for(l=j+1;l<5;l++){for(q=5;q>=j;q--){a[l][q]=(a[l][q]-(a[l][j]/a[j][j])*a[j][q]);}}printf("消去一列:\n");for(o=0;o<5;o++){for(p=0;p<6;p++){printf("%12.6f",a[o][p]);}printf("\n");}}x[4]=a[4][5]/a[4][4];x[3]=(a[3][5]-x[4]*a[3][4])/a[3][3];x[2]=(a[2][5]-x[4]*a[2][4]-x[3]*a[2][3])/a[2][2];x[1]=(a[1][5]-x[4]*a[1][4]-x[3]*a[1][3]-x[2]*a[1][2])/a[1][1];x[0]=(a[0][5]-x[4]*a[0][4]-x[3]*a[0][3]-x[2]*a[0][2]-x[1]*a[0][1])/a[0][0];printf("方程组的解为:\n");for(i=0;i<5;i++){printf("x[%d]=%12.6f\n",i,x[i]);}}矩阵直接三角分解法算法:将方程组A x=b 中的A 分解为A =LU ,其中L 为单位下三角矩阵,U 为上三角矩阵,则方程组A x=b 化为解2个方程组Ly =b ,Ux =y ,具体算法如下:①对j=1,2,3,…,n 计算j j a u 11=对i=2,3,…,n 计算1111/a a l i i =②对k=1,2,3,…,n:a. 对j=k,k+1,…,n 计算∑-=-=11k q qj kq kj kj u l a ub. 对i=k+1,k+2,…,n 计算kk k q qk iq ik ik u u l a l /)(11∑-=-=③11b y =,对k=2,3,…,n 计算∑-=-=11k q q kq k k y l b y④nn n n u y x /=,对k=n-1,n-2,…,2,1计算kk n k q q kq k k u x u y x /)(1∑+=-=注:由于计算u 的公式于计算y 的公式形式上一样,故可直接对增广矩阵[A ∣b ]=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++1,211,2222211,111211n n nn n n n n n n a a a a a a a a a a a a施行算法②,③,此时U 的第n+1列元素即为y 。
选主元消去法的基本原理
选主元消去法的基本原理选主元消去法是高斯消元法的一种改进方法,旨在提高高斯消元法的运算效率。
它通过在每一次消去过程中选择系数矩阵的最大元素(主元)作为基准元素,将其放在消去过程中的当前行首位,从而避免出现除数为零的情况,减小误差累积,并降低运算量。
选主元消去法的基本原理如下:1. 确定主元:在每一次消去过程中,首先需要根据某种准则选择当前列中绝对值最大的元素作为主元素,并将其所在行与当前行进行交换。
常用的准则有最大主元消去法和选主元消去法。
2. 消元过程:将主元所在列中主元下方的所有元素全部变为0。
这一步骤可以通过对当前行进行线性组合,将主元下方的其他元素变为0。
消元过程结束后,主元所在列下方的所有元素均为0。
3. 回代过程:从最后一行开始,用回代法求解未知数。
通过将回代过程中的已求得的未知数带入方程组中的其他未知数,依次求解出剩余的未知数。
选主元消去法的关键在于选择合适的主元。
在最大主元消去法中,选择当前列中绝对值最大的元素作为主元,并进行行交换,使主元所在行位于当前行首位。
这样做的目的是为了最大限度地减小主元造成的误差累积。
然而,在某些情况下,选取最大主元并不能有效地减小误差,甚至可能会增加误差。
因此,选主元消去法中选取主元的准则更为复杂。
在选主元消去法中,选择准则一般有三种:绝对值最大法、相对值最大法和列主元法。
绝对值最大法:选择当前列中绝对值最大的元素作为主元。
这种方法可以有效地减小误差,并提高计算精度。
然而,对于某些特殊的矩阵,如病态矩阵,选择绝对值最大的元素作为主元可能导致误差累积增大。
相对值最大法:选择当前列中相对值最大的元素作为主元,即选择当前列中的元素与该列中绝对值最大的元素的比值最大的元素作为主元。
相对值最大法能够有效地降低误差累积,并提高计算精度。
列主元法:选择当前列中除主元外绝对值最大的元素所在的行作为主元所在的行。
这种方法能够有效地减小误差,尤其在处理病态矩阵时效果显著。
Guass列选主元消去法和三角分解法
Guass列选主元消去法和三⾓分解法 最近数值计算学了Guass列主消元法和三⾓分解法解线性⽅程组,具体原理如下:1、Guass列选主元消去法对于AX =B1)、消元过程:将(A|B)进⾏变换为,其中是上三⾓矩阵。
即:k从1到n-1a、列选主元选取第k列中绝对值最⼤元素作为主元。
b、换⾏c、归⼀化d、消元2)、回代过程:由解出。
2、三⾓分解法(Doolittle分解)将A分解为如下形式由矩阵乘法原理a、计算U的第⼀⾏,再计算L的第⼀列b、设已求出U的1⾄r-1⾏,L的1⾄r-1列。
先计算U的第r⾏,再计算L的第r列。
a)计算U的r⾏b)计算L的r列C#代码: 代码说明:Guass列主消元法部分将计算出来的根仍然储存在增⼴矩阵的最后⼀列,⽽Doolittle分解,将分解后的结果也储存⾄原来的数组中,这样可以节约空间。
using System;using System.Windows.Forms;namespace Test{public partial class Form1 : Form{public Form1(){InitializeComponent();}private void Cannel_Button_Click(object sender, EventArgs e){this.textBox1.Clear();this.textBox2.Clear();this.textBox3.Clear();boBox1.SelectedIndex = -1;}public double[,] GetNum(string str, int n){string[] strnum = str.Split(' ');double[,] a = new double[n, n + 1];int k = 0;for (int i = 0; i < n; i++){for (int j = 0; j < strnum.Length / n; j++){a[i, j] = double.Parse((strnum[k]).ToString());k++;}}return a;}public void Gauss(double[,] a, int n){int i, j;SelectColE(a, n);for (i = n - 1; i >= 0; i--){for (j = i + 1; j < n; j++)a[i, n] -= a[i, j] * a[j, n];a[i, n] /= a[i, i];}}//选择列主元并进⾏消元public void SelectColE(double[,] a, int n){int i, j, k, maxRowE;double temp; //⽤于记录消元时的因数for (j = 0; j < n; j++){maxRowE = j;for (i = j; i < n; i++)if (System.Math.Abs(a[i, j]) > System.Math.Abs(a[maxRowE, j]))maxRowE = i;if (maxRowE != j)swapRow(a, j, maxRowE, n); //与最⼤主元所在⾏交换//消元for (i = j + 1; i < n; i++){temp = a[i, j] / a[j, j];for (k = j; k < n + 1; k++)a[i, k] -= a[j, k] * temp;}}return;}public void swapRow(double[,] a, int m, int maxRowE, int n){int k;double temp;for (k = m; k < n + 1; k++){temp = a[m, k];a[m, k] = a[maxRowE, k];a[maxRowE, k] = temp;}}public void Doolittle(double[,] a, int n){for (int i = 0; i < n; i++){if (i == 0){for (int j = i + 1; j < n; j++)a[j, 0] = a[j, 0] / a[0, 0];}else{double temp = 0, s = 0;for (int j = i; j < n; j++){for (int k = 0; k < i; k++){temp = temp + a[i, k] * a[k, j];}a[i, j] = a[i, j] - temp;}for (int j = i + 1; j < n; j++){for (int k = 0; k < i; k++){s = s + a[j, k] * a[k, i];}a[j, i] = (a[j, i] - s) / a[i, i];}}}}private void Exit_Button_Click(object sender, EventArgs e){this.Close();}private void Confirm_Button_Click(object sender, EventArgs e){if (this.textBox2.Text.Trim().ToString().Length == 0){this.textBox2.Text = this.textBox1.Text.Trim();}else{this.textBox2.Text = this.textBox2.Text + "\r\n" + this.textBox1.Text.Trim();}this.textBox1.Clear();}private void Calculate_Button_Click(object sender, EventArgs e){string str = this.textBox2.Text.Trim().ToString();string myString = str.Replace("\n", " ").Replace("\r", string.Empty);double[,] a = new double[this.textBox2.Lines.GetUpperBound(0) + 1, this.textBox2.Lines.GetUpperBound(0) + 2];a = GetNum(myString, this.textBox2.Lines.GetUpperBound(0) + 1);if (boBox1.Text == "Guass列主消元法"){Gauss(a, this.textBox2.Lines.GetUpperBound(0) + 1);for (int i = 0; i < this.textBox2.Lines.GetUpperBound(0) + 1; i++){this.textBox3.Text = this.textBox3.Text + "\r\nX" + (i + 1) + "=" + a[i, this.textBox2.Lines.GetUpperBound(0) + 1]; }}else if (boBox1.Text == "Doolittle三⾓分解法"){this.textBox3.Enabled = true;Doolittle(a, this.textBox2.Lines.GetUpperBound(0) + 1);bel3.Text = "分解后的结果:";this.textBox3.Clear();this.textBox3.Text += "L矩阵:\r\n";for (int i = 0; i < this.textBox2.Lines.GetUpperBound(0) + 1; i++) {for (int j = 0; j < this.textBox2.Lines.GetUpperBound(0) + 1; j++) {if (j < i){this.textBox3.Text += a[i, j].ToString() + "\t";}else if (i == j){this.textBox3.Text += "1\t";}else{this.textBox3.Text += "0\t";}}this.textBox3.Text += "\r\n";}this.textBox3.Text += "\r\nU矩阵:\r\n";for (int i = 0; i < this.textBox2.Lines.GetUpperBound(0) + 1; i++) {for (int j = 0; j < this.textBox2.Lines.GetUpperBound(0) + 1; j++) {if (j >= i){this.textBox3.Text += a[i, j].ToString() + "\t";}else{this.textBox3.Text += "0\t";}}this.textBox3.Text += "\r\n";}}}private void textBox1_KeyDown(object sender, KeyEventArgs e){if (e.KeyCode == Keys.Enter){if (this.textBox1.Text.Trim().ToString().Length == 0){Calculate_Button_Click(sender, e);}else{Confirm_Button_Click(sender, e);}}}private void button1_Click(object sender, EventArgs e){this.textBox2.Enabled = true;}}} 运⾏截图: ⾄此完毕。
lu分解原理
lu分解原理
LU分解的原理是将一个矩阵分解为一个下三角矩阵L和一个上三角矩阵U 的乘积。
这种分解也被称为LU分解,它是线性代数中一种常用的矩阵分解方法。
LU分解主要应用在数值分析中,用来解线性方程、求反矩阵或计算行列式。
在具体实现上,LU分解通过高斯消元法进行。
具体过程如下:
1. 对矩阵A进行列主元高斯消元,消元过程中会用到矩阵的初等变换。
2. 把消元过程中记录下来的消元主元放到一个n * n的矩阵U的对角线上,将消元过程中得到的消元因子放到一个n * n的矩阵L的对角线以下,得到LU分解。
实质上,LU分解是将A通过初等行变换变成一个上三角矩阵,其变换矩阵就是一个单位下三角矩阵。
这正是所谓的杜尔里特算法(Doolittle algorithm):从下至上地对矩阵A做初等行变换,将对角线左下方的元素变成零,然后再证明这些行变换的效果等同于左乘一系列单位下三角矩阵,这一系列单位下三角矩阵的乘积的逆就是L矩阵,它也是一个单位下三角矩阵。