中达CUC-01H协议调试手册
CUC-06H和CUC-09H 系列V2.1版电总协议
CUC-06H和CUC-09H系列监控通讯协议2.1版第6版 2011年1月修订历史:修订时间 修订内容 备注 修订人2007/10/20 第1版2008/04/30 增加自定义参数2命令、环境侦测板协议等内容 第2版2008/12/19 增加中国移动标准的效能管理参数设置 第3版2009/03/10 增加扩展IO板和熔丝侦测板协议 第4版2009/06/16 增加电池组中位电压侦测协议 第5版2011/01/27 增加自定义参数。
第6版声明:此协议文本在YD/T1363.3-2005(电总协议V2.1版)基础上增加自定义部分完成。
此协议适用于CUC-06HB,CUC-06HC,CHC-06HD,CUC-18HA,CUC-09HA和CUC-09HB等CSU。
目 录一、范围 (3)二、规范性引用文件 (3)三、术语和定义 (3)四、监控对象及内容 (3)五、通信接口和传输速率 (3)六、通信方式 (4)七、信息类型和信息结构 (4)八、数据格式 (5)九、编码分类 (7)十、通用命令 (9)10.1获取时间 (9)10.2设定时间 (9)10.3获取协议版本号 (9)10.4获取设备(SM)地址 (10)10.5获取设备(SM)厂商信息 (10)十一、 开关电源供电系统通信协议数据类型 (11)十二、交流配电系统通信协议 (11)12.1获取系统模拟量量化数据(浮点数) (11)12.2.获取系统开关输入状态 (12)12.3.获取告警状态 (13)12.4.获取系统参数(浮点数) (15)12.5.设定参数(浮点数) (16)12.6.获取自定义参数命令信息 (16)12.7.设置自定义参数命令 (19)十三、整流配电系统通信协议 (19)13.1.获取系统模拟量量化数据(浮点数) (19)13.2.获取系统开关输入状态 (20)13.3.获取告警状态 (21)13.4.遥控 (22)十四、直流配电系统通信协议 (23)14.1.获取系统模拟量量化数据(浮点数) (23)14.2.获取告警状态 (24)14.3.获取参数(浮点数) (28)14.4.设定参数(浮点数) (29)14.5.直流侦测板数据 (29)14.6. 获取直流侦测板参数 (30)14.7. 设定直流侦测板参数 (31)14.8.获取直流侦测板模拟量和数字量通道名称 (32)14.9.设定直流侦测板通道名称 (33)14.10.直流侦测板遥控 (34)14.11.获取电池侦测板数据电池单体电压 (34)14.12.电池组中位电压数据 (35)14.13.获取历史记录 (35)14.14.IO扩展板和熔丝板数据 (36)14.15.获取IO扩展板和熔丝板参数 (37)14.16.设置IO扩展板和熔丝板参数 (38)一、范围本部分规定了通信局(站)内为实现集中监控而使用的电源设备在设计、制造中应遵循的通信协议,同时规定了通信局(站)电源、空调及环境集中监控管理系统中监控模块和监控单元之间的通信协议。
最新中达开关电源系统调试操作书
中达开关电源系统调试操作书请各县市代维人员按照<<中达调试操作书>>上的步骤调试好新旧中达开关电源的参数:中达开关电源一次下电应设为44V、二次下电应设为46.8V;新型中达开关电源(带OBO防雷模块、带低压隔离侦测板)必须在侦测板上(用万用表直流电压档表笔接入第二个孔:低压隔离跳脱调节和第四孔:地线孔)把电压调至4.68V;侦测板上不能有红灯亮,亮红灯表示侦测板处于手动状态,按一下第五个按钮红灯灭,表示处于自动状态。
《中达开关电源系统调试操作书》中达电通电源系统操作及参数设定:说明系统运作资料的显示和告警画面的说明, 以及系统如何进行参数设定, 已由用户针对某些特定的参数重新设定, 其余则由出厂时设定完成。
系统显示1. 首页画面:监控单元(CSU )的资料显示,是液晶显示器(LCD)和三个发光二极管来执行。
红色为主要告警指示,黄色为次要告警指示,黄色为均充充电指示(见上的CSU 显示屏幕图示)。
液晶显示器首页显示画面的内容为:直流输出电压、直流输出电流、交流输入电压、系统状态。
在正常状况下系统异常告警资料并不显示,只有在供电系统发生异常时,才会有系统告警内容显示出来。
开机时首页画面显示:直流电压--直流供电系统直流输出电压 负载电流--供电系统输出总负载电流交流电压—系统交流电压(取第二相) 状 态--显示系统的状态(浮充,均充)在首页下,按下列按键分别显示下列内容:增 —显示资料内容.(只能查看,不能设置或更改)减 —显示参数设定内容.(下面详细讲解)回车 —显示历史纪录内容和时间.直流电压 54.3 V 负载电流 0 A 交流电压 220 V 状态 浮充 主要告警指示灯次要告警指示灯均充指示灯(只能查看,不能设置或更改)返回—显示告警内容.(只能查看,不能设置或更改)2. 系统操作参数设定画面在系统操作前,必须现进行模块ID重置,操作步骤见,否则会导致系统模块均充灯闪烁不停。
中达开关电源维护操作手册(精简版)
中达开关电源维护操作手册(精简版)中达系列开关电源维护手册福建移动通信2006-6汇编前言1.本手册使用说明在本手册中,我们简要介绍了目前我省常用的中达ES3000/MCS3000,ES5500/MCS6000及ES750/MCS1800系列开关电源系统的基本原理、产品性能,接着着重对系统参数配置、设定等日常操作及故障处理方法(同时提供部分实战案例供各位参考)进行汇编;最后是有关中达电源系统的维护要点及开关电源维护制度汇编。
2.各章节内容编排顺序为第一节开关电源系统原理简介------------------------------------------P41.1常用中达开关电源系列及特点-----------------------------------P41.2中达电源整流模块工作原理-------------------------------------P41.3交流配电单元------------------------------------------------P41.4直流配电单元------------------------------------------------P41.5 监控单元----------------------------------------------------P51. 6蓄电池低电压隔离保护原理------------------------------------P5第二节系统配置及主要性能指标---------------------------------------P62.1 MCS3000系统配置---------------------------------------------P62.2 MCS3000整流模块---------------------------------------------P72.3 MCS6000系统配置---------------------------------------------P102.4 交流配电屏--------------------------------------------------P112.5直流配电屏---------------------------------------------------P122.6 MCS6000整流屏-----------------------------------------------P12第三节参数设置-----------------------------------------------------------P153.1中达开关电源系统安装程序如下--------------------------------P153.2 ES-3000监控模块的操作与调整--------------------------------P153.3 MSC-3000面板参数设置---------------------------------------P283.4 ES-55OO系统操作与参数设定---------------------------------P313.5 MCS-6000参数设置简介-------------------------------------P433.6 ES-750系列系统参数设定-------------------------------------P483.7 MCS-1800 室外型系列操作与使用说明---------------------------P48第四节中达系列开关电源故障处理------------------------------------P49 4.1 ES-3000故障处理---------------------------------------------P49 4.2 MCS-3OOO故障处理--------------------------------------------P52 4.3 ES5500系列故障处理------------------------------------------P54 4.4 MCS6000故障排查方法-----------------------------------------P58 4.5 ES-750系列故障处理方法--------------------------------------P61 4.6 MCS-1800系列故障处理----------------------------------------P61 4.7 实战案例-----------------------------------------------------P62第五节中达电源系统维护保养要点------------------------------------P655.1 清洁与保养---------------------------------------------------P65 5.2 整流模块的移出与替换-----------------------------------------P65 5.3 整流模块风扇更换---------------------------------------------P66第六节维护制度------------------------------------------------------------P676.1 变流设备的维护-----------------------------------------------P67 6.2 低压配电设备的维护-------------------------------------------P67第一节开关电源系统原理简介1.1常用中达开关电源系列及特点中达ES3000/MCS3000,ES5500/MCS6000及ES750/MCS1800系列高频开关直流电源系统,由交流配电单元(屏)、整流变换单元、直流配电单元(屏)及监控管理单元组成。
[整理]中达开关电源系统调试操作书
![[整理]中达开关电源系统调试操作书](https://img.taocdn.com/s3/m/2b0630510912a216147929d4.png)
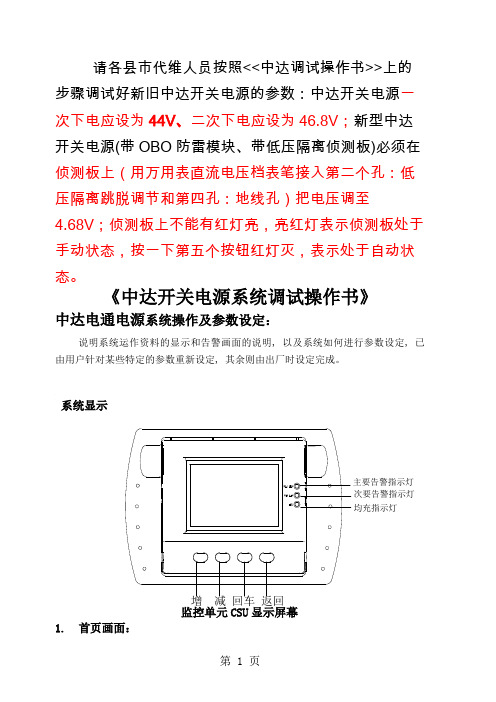
请各县市代维人员按照<<中达调试操作书>>上的步骤调试好新旧中达开关电源的参数:中达开关电源一次下电应设为44V、二次下电应设为46.8V;新型中达开关电源(带OBO防雷模块、带低压隔离侦测板)必须在侦测板上(用万用表直流电压档表笔接入第二个孔:低压隔离跳脱调节和第四孔:地线孔)把电压调至4.68V;侦测板上不能有红灯亮,亮红灯表示侦测板处于手动状态,按一下第五个按钮红灯灭,表示处于自动状态。
《中达开关电源系统调试操作书》中达电通电源系统操作及参数设定:说明系统运作资料的显示和告警画面的说明, 以及系统如何进行参数设定, 已由用户针对某些特定的参数重新设定, 其余则由出厂时设定完成。
系统显示1. 首页画面:监控单元(CSU )的资料显示,是液晶显示器(LCD)和三个发光二极管来执行。
红色为主要告警指示,黄色为次要告警指示,黄色为均充充电指示(见上的CSU 显示屏幕图示)。
液晶显示器首页显示画面的内容为:直流输出电压、直流输出电流、交流输入电压、系统状态。
在正常状况下系统异常告警资料并不显示,只有在供电系统发生异常时,才会有系统告警内容显示出来。
开机时首页画面显示:直流电压--直流供电系统直流输出电压 负载电流--供电系统输出总负载电流交流电压—系统交流电压(取第二相) 状 态--显示系统的状态(浮充,均充)在首页下,按下列按键分别显示下列内容:增 —显示资料内容.(只能查看,不能设置或更改)减 —显示参数设定内容.(下面详细讲解)回车 —显示历史纪录内容和时间.(只能查看,不能设置或更改)返回—显示告警内容.(只能查看,不能设置或更改)2. 系统操作参数设定画面在系统操作前,必须现进行模块ID重置,操作步骤见,否则会导致系统模块均充灯闪烁不停。
增键—向上调整选项/增加数值减键—向下调整选项/减少数值回车键—进入选择的项目/数据存贮并回到上一级菜单返回键—返回到上一级菜单/不存贮数据并回到上一级菜单.1 告警参数设定1.1 高压停机设定按回车此项要求更改为58.0伏1.2 高压告警按回车键出现如下画面:此项不要求更改.(只需查看值为57.5伏) 1.3 低压告警按回车键出现如下画面:此项不要求更改.(只需查看值为44伏)1.4按回车键出现如下画面:此项不要求更改.(只需查看值为290伏)1.5 交流低压告警参数设定画面显示:按回车此项不要求更改1.6 电池过温告警按回车此项不要求更改1.7 室温过温告警按回车键出现如下画面:此项不要求更改2 模块功能设定画面显示:(重点):按回车键出现如下画面:可以通过按增或减键来改变手动或自动模式,画面如下:设定手动模式时,按注:可以通过按增或减键来改变限流值。
KC-01产品使用说明书
KC-01产品使用说明书深圳市必爱歌电子科技有限公司型号:KC-01(客户型号:)拟制:DN:,,email=12019.05.0514:33:57 +08'00'使用说明书审核:批准:KC-01红外控制器使用说明一、产品功能概述●可以配合TA-185、TC-190等墙板对室内红外控制的空调进行控制●内置海尔、格力、美的、东芝、长虹、LG空调遥控器的功能●可以通过学习的方式适应其他空调的控制功能●自带记忆功能,可以学习7个长度为128bit的遥控码●简单快捷的拷贝即可把母机的参数拷贝到子机上●红外发射距离0-8米二、产品外观三、技术参数●工作电压:12V●工作功耗0.7W四、功能说明1、接线拓扑图●外型尺寸:90*90*25.5mm(长*深*高)●发射距离0-8米2、选择遥控器类型按住确认键,再通电开机,LED屏幕显示“U1”,再短按确认键,LED屏幕显示“01”,表示第一个遥控器,按上下键可以选择不同的遥控器,接上发射头,按确认键可以发射从1到7的遥控码,空调收到之后会做出不同的反应。
设置完成后会自动记忆。
遥控器列表00010203学习型遥控码海尔格力美的040506东芝长虹LG3、学习遥控码按住确认键,再通电开机,LED屏幕显示“U1”,按向下键,屏幕显示“U2”,按确认键,屏幕显示“A1”,这时接上遥控接收头,按一下确认键,“A1”闪烁,表示正在等待接收遥控码,此时按遥控器,屏幕显示“-1”,再显示“A1”,表示学习完成。
再按一下向下键,屏幕显示“A2”,同样的方式可以学习1-7个遥控码,接收完成后数据会自动记忆。
1-7个遥控码说明010205空调关闭制冷26度低风制热20度低风0306制冷23度中风制热23度中风0407制冷20度高风制热26度高风4、拷贝按住确认键,再通电开机,LED屏幕显示“U1”,按向下键,直到屏幕显示“U3”,按确认键,屏幕显示“CO”,进入拷贝模式。
KCU-01 USB 模块用户手册说明书

KCU-01USB ModuleTel : + 886-7-8121771Fax : + 886-7-8121775URL : ______________________________________________________________________________________ 2SECTION 1 : INTRODUCTIONThe KCU-01 is the USB module that is designed to enable the Kutai Electronics genset controllers (AMF-10, GCU-100, GCU-3000) to be operated and monitored remotely.Via the designated operation software (Please reference from KCU-01 software user manual) user can program and change parameters remotely instead of accessing program through the controller in person.In the remote operation, when Connecting KCU-01 via two-wire telephone line, an additional USB modem is required to connect to the KCU-01 USB port. The remote operating PC will also need to be equipped with modem / USB modem MAIN CHARACTERISTICS :● The KCU-01 software interface is user friendly which makes it easy for user to monitor and change program setting remotely. ● When operating on site (Local operation mode), user can connect the KCU-01 USB port to the PC via USB harness or connect to an USB modem for remote operation ● When operating KCU-01 in remote operation mode, if no data is transmitted within 40 seconds after connection then the module will automatically disconnect. ● Supports Logo Image downloads for ATS-PLC when installed the “Image Transfer ” software .SECTION 2 : DIMENSIONSECTION 3 : INSTALLATIONDisconnect controller power source and follow the below illustrations to complete the installation of KCU-01.Step 1:Remove slot cover from the back ofcontroller.Step 2:Insert KCU-01 into the designated slot.Step 3:Tighten the screw.______________________________________________________________________________________3Step 4:Start up the controller and operate through the controller front panel and enter system setting to program corresponding startup settings (Remote operation activation).The KCU-01 currently supports AMF-10, GCU-100, GCU-3000, ATS-22, ATS-33, ATS-34 and ATS-PLC etc. controllers. The followings are the basic description of operation settings. For more detail information, please reference from the controller ’s operation manual.Remark :If remote access is programmed to “Remote access cancelled" or "turn OFFATS-PLC communication interface “, user can only execute monitoring and changing system parameter and unable to execute controller command.SECTION 4 : OPERATIONFor more information on KCU-01 Data link status LED indicator, please reference from chapter 5.Example 01:On site / Local operation mode.Controller endExample 02:Remote Operation mode.USB MODEMHost ComputerSECTION 5 : STATUS INDICATOR & TROUBLESHOOTINGS5.1 Through the KCU-01 LED status indicator user can understand the current operating status5.2 Trouble shootingsLED Indicator______________________________________________________________________________________ 4。
中达电通 AH500 运动控制模块手册 (2)说明书

绵密网络 专业服务中达电通已建立了41个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。
地址:上海市浦东新区民夏路238号邮编:201209电话:(021)5863-5678传真:(021)5863-0003网址:中达电通公司版权所有如有改动,恕不另行通知上海电话:(021)6301-2827传真:(021)6301-2307武汉电话:(027)8544-8265传真:(027)8544-9500济南电话:(0531)8690-7277传真:(0531)8690-7099乌鲁木齐电话:(0991)6118-160传真:(0991)6118-289沈阳电话:(024)2334-1612传真:(024)2334-1163南昌电话:(0791)6255-010传真:(0791)6255-102长沙电话:(0731)8827-7881传真:(0731)8827-7882郑州电话:(0371)6384-2772传真:(0371)6384-2656西安电话:(029)8836-0640传真:(029)88360640-8000长春电话:(0431)8892-5060传真:(0431)8892-5065合肥电话:(0551)2816-777传真:(0551)2816-555南宁电话:(0771)5879-599传真:(0771)2621-502北京电话:(010)8225-3225传真:(010)8225-2308成都电话:(028)8434-2075传真:(028)8434-2073南京电话:(025)8334-6585传真:(025)8334-6554厦门电话:(0592)5313-601传真:(0592)5313-628天津电话:(022)2301-5082传真:(022)2335-5006重庆电话:(023)8806-0306 传真:(023)8806-0776杭州电话:(0571)8882-0610传真:(0571)8882-0603广州电话:(020)3879-2175传真:(020)3879-2178太原电话:(0351)4039-475传真:(0351)4039-047哈尔滨电话:(0451)5366-0643传真:(0451)5366-0248AH-0101610-032015-10-31AH500 运动控制模块手册/iaAH500运动控制模块手册AH500运动控制模块手册目录第1章AH500运动控制模块架构1.1 硬件AH500运动控制模块功能架构 ................................. 1-21.2 软件O100主程序架构................................................. 1-51.2.1 O100主程序手动功能运动方式................................. 1-61.3 OX运动子程序架构..................................................... 1-71.4 Pn子程序架构........................................................... 1-91.5 O100、OX、Pn整体程序区块规划之架构........................ 1-111.5.1 程序架构介绍..................................................... 1-11第2章硬件规格及配线方式2.1 硬件规格.................................................................. 2-22.1.1 一般规格 ............................................................ 2-22.1.2 输入点电气规格.................................................... 2-32.1.3 输出点电气规格.................................................... 2-92.1.4 外观尺寸 .......................................................... 2-132.1.5 模块部位介绍..................................................... 2-152.2 配线方式................................................................ 2-192.2.1 I/O连接线及配线模块.......................................... 2-192.2.2 输入接点配线..................................................... 2-252.2.3 输出接点配线..................................................... 2-282.2.4 与下位驱动器之配线............................................. 2-302.3 通讯端口................................................................ 2-36第3章各种装置功能3.1 模块各装置编号一览表 ................................................. 3-23.2 数值、常数[K]/[H]、浮点数[F] ...................................... 3-33.3 外部输入[X]/输出[Y]接点的编号及功能............................. 3-53.4 辅助继电器[M]的编号及功能.......................................... 3-73.5 特殊辅助继电器[SM]的编号及功能 .................................. 3-73.6 内部继电器[S]的编号及功能 .......................................... 3-7i3.7 定时器[T]的编号及功能................................................ 3-83.8 计数器[C]的编号及功能................................................ 3-93.9 寄存器[D][V][Z]的编号及功能..................................... 3-143.9.1 数据寄存器[D] ................................................... 3-143.9.2 变址用寄存器[V][Z] ............................................ 3-143.10 特殊寄存器[SR]的编号及功能 ...................................... 3-153.11 指针[P]的编号及功能................................................. 3-153.12 特殊继电器[SM]及特殊寄存器[SR] ................................ 3-163.12.1 特殊继电器[SM] ................................................. 3-163.12.2 特殊寄存器[SR] ................................................. 3-203.13 特殊继电器[SM]及特殊寄存器[SR]功能说明..................... 3-263.14 运动模式特殊寄存器[SR] ............................................ 3-39第4章基本顺序指令4.1 基本指令一览表.......................................................... 4-24.2 基本指令说明 ............................................................ 4-4第5章应用指令分类及基本使用5.1 应用指令一览表.......................................................... 5-45.2 应用指令的组成.......................................................... 5-85.3 应用指令对数值的处理方式.......................................... 5-125.4 使用变址寄存器V、Z来修饰操作数 ............................... 5-155.5 指令索引................................................................ 5-165.6 应用指令说明 .......................................................... 5-205.7 运动功能块一览表................................................... 5-1295.8 运动功能块引脚介绍................................................ 5-1315.8.1 输入/输出引脚功能定义....................................... 5-1315.8.2 输入/输出引脚时序图 ......................................... 5-1325.8.3 PMSoft软件操作介绍......................................... 5-1335.9 台达定义参数一览表................................................ 5-1365.10 单轴运动功能块说明............................................... 5-1395.10.1 绝对单段速运动 ............................................. 5-1395.10.2 相对单段速运动 ............................................. 5-142 ii5.10.3 绝对两段速运动 ............................................. 5-1455.10.4 相对两段速运动 ............................................. 5-1485.10.5 插入单段速运动 ............................................. 5-1505.10.6 插入两段速运动 ............................................. 5-1545.10.7 寸动运动...................................................... 5-1565.10.8 手摇轮模式运动 ............................................. 5-1595.10.9 原点回归运动................................................ 5-1605.10.10 单轴运动停止................................................ 5-1625.10.11 运动轴参数设定I ............................................ 5-1645.10.12 运动轴参数设定II .......................................... 5-1655.10.13 读取当前位置/速度 ......................................... 5-1675.10.14 轴状态信息................................................... 5-1685.10.15 设定当前位置................................................ 5-1705.10.16 输入极性设定................................................ 5-1715.10.17 电子齿轮运动................................................ 5-1745.10.18 凸轮啮合...................................................... 5-1765.10.19 凸轮数据点读取 ............................................. 5-1785.10.20 凸轮数据点写入 ............................................. 5-1795.10.21 凸轮同步速率计算........................................... 5-1815.10.22 凸轮曲线规划................................................ 5-1825.10.23 凸轮曲线更新................................................ 5-1845.11 多轴运动功能块说明............................................... 5-1865.11.1 G码参数设定................................................ 5-1865.11.2 G码运行...................................................... 5-1875.11.3 G码停止...................................................... 5-1895.11.4 M码读取 ..................................................... 5-1915.11.5 多轴绝对直线插补........................................... 5-1935.11.6 多轴相对直线插补........................................... 5-1945.11.7 多轴直线插补停止........................................... 5-1965.12 网络功能块说明 .................................................... 5-1985.12.1 伺服启动/停止............................................... 5-1985.12.2 伺服重置...................................................... 5-1995.12.3 伺服参数写入................................................ 5-200iii5.12.4 伺服参数读取................................................ 5-2025.12.5 伺服回原点命令 ............................................. 5-2045.12.6 伺服DMCNET通讯初始化 ................................ 5-2065.12.7 伺服捕捉功能................................................ 5-2075.12.8 Ethernet IP Address 设定 .............................. 5-2095.13 其它功能块说明 .................................................... 5-2105.13.1 SD主程序备份 .............................................. 5-2105.13.2 SD装置备份................................................. 5-2115.13.3 SD装置回存................................................. 5-2125.13.4 高速计数器................................................... 5-2135.13.5 高速定时器................................................... 5-2145.13.6 高速比较设定................................................ 5-2165.13.7 高速比较重置................................................ 5-2185.13.8 高速捕捉设定................................................ 5-2195.13.9 高速捕捉遮蔽................................................ 5-2225.13.10 中断设定...................................................... 5-2235.13.11 绝对型编码器................................................ 5-224第6章模块数据传递6.1 功能简介.................................................................. 6-26.2 参数介绍.................................................................. 6-26.3 功能使用.................................................................. 6-5第7章单轴运动功能7.1 单轴运动功能 ............................................................ 7-27.2 单轴运动功能简介..................................................... 7-137.3 JOG模式使用介绍.................................................... 7-147.3.1 专属对应特殊寄存器............................................. 7-147.3.2 运动操作说明..................................................... 7-157.4 变速度模式使用介绍.................................................. 7-167.4.1 专属对应特殊寄存器............................................. 7-167.4.2 运动操作说明..................................................... 7-177.5 手摇轮操作模式使用介绍............................................. 7-18 iv7.5.1 专属对应的特殊寄存器.......................................... 7-187.5.2 运动操作说明..................................................... 7-197.6 原点回归模式使用介绍 ............................................... 7-207.6.1 专属对应的特殊寄存器.......................................... 7-207.6.2 运动操作说明..................................................... 7-227.7 单段速定位模式使用介绍............................................. 7-267.7.1 专属对应的特殊寄存器.......................................... 7-267.7.2 运动操作说明..................................................... 7-277.8 插入单段速定位模式使用介绍....................................... 7-287.8.1 专属对应的特殊寄存器.......................................... 7-287.8.2 运动操作说明..................................................... 7-297.9 连续两段速定位模式使用介绍....................................... 7-307.9.1 专属对应的特殊寄存器.......................................... 7-307.9.2 运动操作说明..................................................... 7-327.10 插入两段速定位使用介绍 ........................................... 7-337.10.1 专属对应的特殊寄存器......................................... 7-337.10.2 运动操作说明 ................................................... 7-347.11 状态标志与寄存器 ................................................... 7-35第8章电子凸轮功能8.1 电子凸轮(E-CAM)简介.............................................. 8-28.2 电子凸轮的实现方式.................................................... 8-38.2.1 初始设定 ............................................................ 8-38.2.1.1 建立电子凸轮数据............................................ 8-38.2.1.2 输入/出脉冲形式设定........................................ 8-48.2.2 主从轴设定及操作 ................................................. 8-58.2.2.1 主轴来源设定 ................................................. 8-68.2.2.2 主轴启动角度设定............................................ 8-68.2.2.3 从轴输出设定 ................................................. 8-78.2.3 周期式电子凸轮启动/停止........................................ 8-88.2.3.1 周期式电子凸轮启动......................................... 8-88.2.3.2 周期式电子凸轮停止......................................... 8-98.3 电子凸轮数据(E-CAM Data)建立............................... 8-11v8.3.1 PMSoft CAM Chart绘制电子凸轮数据...................... 8-118.3.1.1 根据主从轴的标准函数关系绘制 ......................... 8-118.3.1.2 主从轴根据实际工作的点对点关系绘制 ................. 8-158.3.1.3 单笔电子凸轮数据(E-CAM Data)建立/变更........ 8-178.4 电子凸轮应用-飞剪应用.............................................. 8-198.4.1 飞剪电子凸轮数据建立.......................................... 8-218.4.2 功能块-凸轮飞剪曲线生成操作 ................................ 8-218.4.3 功能块-凸轮动态变更操作...................................... 8-268.4.4 飞剪电子凸轮范例 ............................................... 8-26第9章多轴插补运动9.1 多轴插补功能简介....................................................... 9-29.2 O指针/M码指令及G码指令一览表 ................................. 9-29.3 G码指令的组成.......................................................... 9-39.4 G码指令说明 ............................................................ 9-69.5 O指针/M码指令...................................................... 9-239.6 TO指令使用说明...................................................... 9-26第10章高速计数与计时功能10.1 高速计数器............................................................ 10-210.2 高速定时器............................................................ 10-6第11章高速捕捉与比较功能11.1 高速比较与捕捉功能使用格式...................................... 11-211.2 比较功能 .............................................................. 11-211.3 清除输出功能......................................................... 11-911.4 捕捉功能 ............................................................ 11-1011.5 屏蔽功能 ............................................................ 11-15第12章以太网络设置12.1 功能简介 .............................................................. 12-212.2 功能规格 .............................................................. 12-212.3 参数功能介绍......................................................... 12-212.4 PMSoft通讯功能说明............................................... 12-3 vi12.5 MODBUS通讯功能说明............................................ 12-712.6 以太网络错误说明及排除方式...................................... 12-9第13章扩展保存装置13.1 功能简介 .............................................................. 13-213.2 参数功能介绍......................................................... 13-213.3 G码读取与执行...................................................... 13-413.4 装置备份及回存 ...................................................... 13-513.4.1 备份 .............................................................. 13-513.4.2 回存 .............................................................. 13-813.5 程序备份及回存 ...................................................... 13-913.5.1 备份 .............................................................. 13-913.5.2 回存 .............................................................. 13-913.6 韧体更新 ............................................................ 13-10第14章DMCNET14.1 功能简介 .............................................................. 14-214.2 功能规格 .............................................................. 14-214.3 参数功能 .............................................................. 14-314.4 DMCNET联机说明.................................................. 14-814.5 伺服参数读写说明 ................................................. 14-1114.6 DMCNET运动控制说明 .......................................... 14-1314.7 DMCNET错误说明及排除方式 .................................. 14-1814.7.1增量型伺服连线范例 ......................................................................... 14-1814.7.2绝对型伺服连线范例 ......................................................................... 14-1914.8 DMCNET错误说明及排除方式 .................................. 14-20第15章PMSoft软件-USB通讯设置15.1 功能简介 .............................................................. 15-215.2 功能规格 .............................................................. 15-215.3 PMSoft通讯功能说明............................................... 15-2附录A 错误代码原因对照表A.1 错误代码原因对照表.................................................... A-2viiMEMO viii目录1.1 硬件AH500运动控制模块功能架构 ........................................... 1-2 1.2 软件O100主程序架构........................................................... 1-5 1.2.1 O100主程序手动功能运动方式........................................... 1-6 1.3 OX运动子程序架构............................................................... 1-7 1.4 Pn子程序架构..................................................................... 1-9 1.5 O100、OX、Pn整体程序区块规划之架构.................................. 1-111.5.1 程序架构介绍............................................................... 1-111-1台达AH20MC-5A、AH15PM-5A、AH10PM-5A、AH05PM-5A模块为高速定位、双轴线性及圆弧插补多功能可程控器,其特色是结合了基本指令、应用指令、运动指令及G码指令等功能,让程序编写设计上更多元化。
CSC200系列调试手册
技术支持 电话 :010-62986668
传真: 010-62981900
2
目录 1 调试资料的准备...................................................................................................................................... 6 2 试验前的准备工作.................................................................................................................................. 6 3 装置常用菜单操作.................................................................................................................................. 6
3.1 版本信息.......................................................................................................................................... 7 3.2 定值操作.......................................................................................................................................... 7 3.3 压板设置.......................................................................................................................................... 9 3.4 打印操作.......................................................................................................................................... 9 3.5 开出测试........................................................................................................................................ 10 3.6 开入检查......................................................................................................................................... 10 3.7 远动测试......................................................................................................................................... 11 3.8 报告管理......................................................................................................................................... 11 3.9 其它菜单功能说明........................................................................................................................ 12 4 装置的交流回路的校验........................................................................................................................ 14 4.1 零漂校验........................................................................................................................................ 14 4.2 刻度校验........................................................................................................................................ 15 5 CSC211 保护功能调试 ......................................................................................................................... 16 5.1 三段式定时限过流保护校验......................................................................................................... 18CSC-200 数源自式线路保护测控装置调试指导
中达电源系统设置
中达电源系统设置中达电源控制面板上共有四个按键,分别为增键、减键、回车键和模块键,现将操作方法描述如下:1、(增+减)键同时按:(1)电池均充设置(按电池设置)(2)电池浮充设置(按电池设置)(3)电池标称值(所有电池组容量之和)(4)均充时间(按电池设置)(5)均充周期(按电池设置)(6)均浮充限流值(按两组电池总容量*电池系数计算)(按电池设置)(7)LDVS1跳脱电压(一次下电)(按电池设置)(8)LDVS2跳脱电压(二次下电)(按电池设置)2、(减+加车)键同时按:(1)查历史告警记录3、单按增键或减键:(1)高压告警设置(按电池设置)(2)低压告警设置(按电池设置)(3)模块数量(4)电池数量(电池组数改为1组)(5)声音告警(定义为关)(6)告警输入(定义为闭路)(7)模块分组设置----第一组未尾模块号第二组未尾模块号第三组未尾模块号(情况一:所有模块均正常时,从1开始依次排列,一在第一组里设置最后一块模的号码) (情况二:如果有哪一块模块坏了,出现空位置,此时就要做一个分组设置,比如:一个整流架有7块模块,其中第二个槽位坏了,那么此时的分组设置就应该是:第一组未尾模块号为1,第二组未尾模块号为2,第三组未尾模块号为8,如此类推).4、单按模块键:(1)查询每一个模块的信息注意事项:(1)整流架接告警线的旁边有一个盒子上面的开关为强制吸合的开关,开关在打开的状态下下,市电中断时电池不会有负载脱离的功能,会一直供电到电池没电为止,所以调测时一定要使开关处于关闭状态。
(2)该电源控制模块按键比较难按,特别是按两键组合时需同时按下两个键才有效,调测时可以尝试多按几次,按一次不行则按两下模块键回到浮充界面再重新尝试。
(3)中达电源内部已经是联合接地,所以只需一根地线连接至总地排。
(4)单相交流侦测板设置成常开状态,三相交流侦测板设置成常闭状态。
中达开关电源系统调试操作书-14页word资料
请各县市代维人员按照<<中达调试操作书>>上的步骤调试好新旧中达开关电源的参数:中达开关电源一次下电应设为44V、二次下电应设为46.8V;新型中达开关电源(带OBO防雷模块、带低压隔离侦测板)必须在侦测板上(用万用表直流电压档表笔接入第二个孔:低压隔离跳脱调节和第四孔:地线孔)把电压调至4.68V;侦测板上不能有红灯亮,亮红灯表示侦测板处于手动状态,按一下第五个按钮红灯灭,表示处于自动状态。
《中达开关电源系统调试操作书》中达电通电源系统操作及参数设定:说明系统运作资料的显示和告警画面的说明, 以及系统如何进行参数设定, 已由用户针对某些特定的参数重新设定, 其余则由出厂时设定完成。
第 1 页监控单元(CSU )的资料显示,是液晶显示器(LCD)和三个发光二极管来执行。
红色为主要告警指示,黄色为次要告警指示,黄色为均充充电指示(见上的CSU 显示屏幕图示)。
液晶显示器首页显示画面的内容为:直流输出电压、直流输出电流、交流输入电压、系统状态。
在正常状况下系统异常告警资料并不显示,只有在供电系统发生异常时,才会有系统告警内容显示出来。
开机时首页画面显示:直流电压--直流供电系统直流输出电压 负载电流--供电系统输出总负载电流 交流电压—系统交流电压(取第二相) 状 态--显示系统的状态(浮充,均充)在首页下,按下列按键分别显示下列内容:增 —显示资料内容.(只能查看,不能设置或更改) 减 —显示参数设定内容.(下面详细讲解)回车 —显示历史纪录内容和时间.(只能查看,不能设置或更改) 返回 —显示告警内容.(只能查看,不能设置或更改)2. 系统操作参数设定画面在系统操作前,必须现进行模块ID 重置,操作步骤见,否则会导致系统模块均充灯闪烁不停。
增键 —向上调整选项/增加数值 减键 —向下调整选项/减少数值回车键—进入选择的项目/数据存贮并回到上一级菜单返回键—返回到上一级菜单/不存贮数据并回到上一级菜单.1 告警参数设定一直按减键将出现如下内容:页1.1 高压停机设定按回车1.2 按回车键出现如下画面:1.3 按回车键出现如下画面:此项不要求更改.(只需查看值为44伏)1.4按回车键出现如下画面:1.5 按回车键出现如下画面:此项不要求更改1.6 电池过温告警参数设定画面显示:按回车键出现如下画面:此项不要求更改1.7 室温过温告警参数设定画面显示:第 5 页按回车此项不要求更改 2 模块功能设定画面显示: (重点):按回车键出现如下画面: 可以通过按增或减键来改变手动或自动模式,画面如下:设定手动模式时,按注:可以通过按增或减键来改变限流值。
CP1H操作手册中文

关于在国外的使用
当出口(或提供给非居住者)本产品中属于外汇及外国贸易管理法所规定的出口许可、 承认对象货物(或技术)范围的产品时,必须有以相关法律为基准的出口许可、承认(或 官方交易许可)。
4
关于 CP 系列的「单元版本」
关于 CP 系列的「单元版本」
单元版本是指
在 SYSMAC CP 系列中,为了管理由于版本升级等引起的 CPU 单元配置功能的差异,引 入了「单元版本」这个概念。
W451
CP1H-X40D□-□ CP1H-XA40D□-□ CP1H-Y20DT-D CS1G/H-CPU□□H CS1G/H-CPU□□-V1 CS1D-CPU□□H CS1D-CPU□□S CS1W-SCU21 CS1W-SCB21-V1/41-V1 CJ1G/H-CPU□□H CJ1G-CPU□□P CP1H-CPU□□ CJ1G-CPU□□ CJ1W-SCU21-V1/41-V1 WS02-CXPC1-EV6 WS02-CXPC1-EV6
6
关于 CP 系列的「单元版本」
3)通过单元版本标签进行识别
单元版本标签(下图)附带在产品中。
Ver. Ver.
1.0 1.0
Ver. Ver.
为了管理由于版本升级等引起的 CPU 单元配置功能的差异的标 签。
请根据需要贴在产品的正面。 These Labels can be used to manage differences in the available functions among the Units. Place the appropriate label on the front of the Unit to show what Unit version is actually being used.
GCCT-201H无线高低压CT变比测试仪-用户手册
目录注意 (1)一.简介 (2)二.电气符号 (2)三.技术规格 (3)1. 基准条件 (3)四.结构 (4)五.操作方法 (5)1.一次高压电流钳变比测试方法 (5)2.主机开关机 (5)3.高压电流、高空电流测试 (6)4.一次柔性电流钳变比测试示例图 (7)5. 二次低压电流测试 (8)6.变比测试 (9)7.数据保持/解除 (11)8.数据存储 (11)9.数据查阅 (11)10.数据删除 (11)11.数据上传 (11)六.电池更换 (12)七.装箱单 (13)注意感谢您购买了本公司的GCCT-201H无线高低压CT变比测试仪,为了更好地使用本产品,请一定:——详细阅读本用户手册,操作者必须完全理解手册说明并能熟练操作本仪表后才能进行现场测试。
——严格遵守本手册所列出的安全规则及注意事项。
◆任何情况下,使用本仪表应特别注意安全,特别测量超过AC100V及以上电压线路的时候。
◆严禁用本仪表测试电压超过35kV的裸导线或汇流母线。
◆若被测线路电压超过600V必须连接绝缘杆使用。
◆由于高压线路很危险,操作者必须经严格培训并获得国家相关高压操作认证才能使用本仪表进行现场测试。
◆注意本仪表面板及背板的标贴文字及符号。
◆请勿于高温潮湿,有结露的场所及日光直射下长时间放置和存放仪表。
◆更换电池,请注意电池极性,长时间不用本仪表,请取出电池。
◆拆卸、维修本仪表,必须由有授权资格的人员操作。
◆若本仪表的钳头及其他部件有损伤,请禁止使用。
◆避免冲击钳头,定期保养本仪表,不能用腐蚀剂或粗糙物清洁,须用软布(如眼镜布),沾清洁防锈除湿类的润滑剂(如WD-40),轻轻擦拭仪表即可。
◆由于本仪表原因,继续使用会带来危险时,应立即停止使用,并马上封存,由◆◆作。
◆建议本仪表每年至少进行一次绝缘强度测试(AC 60kV/rms 5节绝缘杆完全连接,两端之间)。
一.简介GCCT-201H无线高低压CT变比测试仪突破传统结构,专为在线测量运行中35kV 以下电流互感器、变压器的一次电流、二次电流大小、变比、角差,相别、极性判断而精心设计制造的。
中达电通 AH500 运动控制模块手册说明书

w w w.d e l t a w w.c om绵密网络 专业服务中达电通已建立了70余个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。
中达电通公司版权所有如有改动,恕不另行通知扫一扫,关注官方微信沈阳电话:(024)2334-1612哈尔滨电话:(0451)5366-5568长春电话:(0431)8892-5060呼和浩特电话:(0471)6297-808北京电话:(010)8225-3225天津电话:(022)2301-5082济南电话:(0531)8690-7277太原电话:(0351)4039-475郑州电话:(0371)6384-2772石家庄电话:(0311)8666-7338上海电话:(021)6301-2827南京电话:(025)8334-6585杭州电话:(0571)8882-0610合肥电话 :(0551)6281-6777武汉电话:(027)8544-8475南昌电话:(0791)6255-010成都电话:(028)8434-2075长沙电话:(0731)8549-9156重庆电话:(023)8806-0306 昆明电话:(0871)6313-7362广州电话:(020)3879-2175厦门电话:(0592)5313-601南宁电话:(0771)5879-599乌鲁木齐电话:(0991)4678-141兰州电话:(0931)8732-800西安电话:(029)8836-0640贵阳电话:(0851)6901-374福州电话:(0591)8755-1305400 - 820 - 9595AH500运动控制模块手册AH500运动控制模块手册地址:上海市浦东新区民夏路238号邮编:201209电话:( 021 )5863-5678传真:( 021 )5863-0003网址:AH-0101610-042022-01-18版权说明©Delta Electronics, Inc. All rights reserved. 台达电子工业股份有限公司保留所有权利本使用手册编撰之所有信息内容属台达电子工业股份有限公司(以下简称「台达」)之专属财产,且受到著作权法及所有法律之保护。
中达电通 AH Motion Controller 硬件手册说明书

创变智造新未来AH Motion Controller 硬件手册中达电通公司版权所有如有改动,恕不另行通知地址:上海市浦东新区民夏路238号邮编:201209电话:( 021 )5863-5678传真:( 021 )5863-0003网址: 扫一扫,关注官方微信绵密网络 专业服务中达电通已建立了70余个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。
400 - 820 - 9595沈阳电话:(024)2334-1160哈尔滨电话:(0451)5366-5568长春电话:(0431)8892-5060呼和浩特电话:(0471)6297-808北京电话:(010)8225-3225天津电话:(022)2301-5082济南电话:(0531)8690-6277太原电话:(0351)4039-485郑州电话:(0371)6384-2772石家庄电话:(0311)8666-7337上海电话:(021)6301-2827南京电话:(025)8334-6585杭州电话:(0571)8882-0610合肥电话 :(0551)6281-6777武汉电话:(027)8544-8475南昌电话:(0791)8625-5010成都电话:(028)8434-2075长沙电话:(0731)8549-9156重庆电话:(023)8806-0306 昆明电话:(0871)6313-7362广州电话:(020)3879-2175厦门电话:(0592)5313-601南宁电话:(0771)2621-501乌鲁木齐电话:(0991)4678-141兰州电话:(0931)6406-725西安电话:(029)8836-0780贵阳电话:(0851)8690-1374福州电话:(0591)8755-1305AH-0259510-032023/02/01AH Motion Controller硬件手册版本修订一览表版本变更内容发行日期第一版第一版发行2016/08/12第二版1.第1章增加支持模块AH10EN-5A、AH15EN-5A、AH10SC M-5A、AH15SC M-5A、AH10DN ET-5A、AH10PF BS-5A、AH10PF BM-5A、AHRT U-DNET-5A、AHRT U-PF BS-5A及AHRT U-ET HN-5A与背板AH BP03M2-5A机种2.第2章增加支持模块AH10EN-5A、AH15EN-5A、AH10SC M-5A、AH15SC M-5A、AH10DN ET-5A、AH10PF BS-5A、AH10PF BM-5A、AHRT U-DNET-5A、AHRT U-PF BS-5A及AHRT U-ET HN-5A与背板AH BP03M2-5A机种相关数据及更新I/O连接线及配线模块型号3.第3章模块相关信息改为参考AH500系列硬件手册4.第4章模块相关信息改为参考AH500系列硬件手册2017/08/31第三版1.第3.2.7节更新接脚5及接脚292.第4章配线图面C0、C1、C2、C3改为CO M3.删除第1.2节(内容与第3章重复)4.更新第1.1.2节的图5.第3.1节增加适用大气压及外壳防火等级6.第3.2.1节增加通讯口及数字IO隔离规格7.第3.2.3节更新Ether CAT传输线8.第5章维护与检查更新2023/02/01AH Motion Controller硬件手册目录前言P.1 简介 (II)P.1.1 适用产品 (II)P.1.2 相关手册 (II)P.2 关于手册间的交互参照.................................................... I II第1章产品介绍1.1 AH系列运动控制器...................................................... 1-21.1.1 产品特色............................................................ 1-31.1.2 系统配置概述....................................................... 1-6第2章系统配置2.1 基本系统配置............................................................. 2-22.1.1 AH运动控制CPU网络配置 ..................................... 2-32.1.2 AH500系列模块配置............................................. 2-42.2 软件的连接配置 ......................................................... 2-102.3 网络配置总览............................................................ 2-112.3.1 EtherNet/IP ...................................................... 2-12第3章产品规格3.1 环境规格................................................................... 3-23.2 AH运动控制CPU ........................................................ 3-23.2.1 一般规格............................................................ 3-23.2.2 运动控制功能规格................................................. 3-63.2.3 通讯端口............................................................ 3-73.2.4 I/O寻址范围....................................................... 3-93.2.5 部位介绍........................................................... 3-163.2.6 外观尺寸........................................................... 3-183.2.7 端子配置........................................................... 3-183.2.8 储存卡插槽 ........................................................ 3-19i3.3 I/O模块.................................................................. 3-20第4章安装与配线4.1 安装前快速检查 .......................................................... 4-24.1.1 AH Motion硬件组件............................................. 4-24.2 安装注意事项............................................................. 4-64.3 安装方法................................................................... 4-74.3.1 盘内安装............................................................ 4-74.3.2 固定背板............................................................ 4-74.3.3 安装模块............................................................ 4-94.3.4 安装脱落式端子................................................... 4-104.3.5 安装配线模块...................................................... 4-144.3.6 连接通讯线 ........................................................ 4-144.3.7 储存卡的安装与卸除 ............................................. 4-154.4 配线 ....................................................................... 4-174.5 电源配线.................................................................. 4-184.5.1 预防措施........................................................... 4-184.5.2 接地................................................................. 4-194.5.3 电源输入配线...................................................... 4-204.5.4 消耗功率........................................................... 4-224.6 AH运动控制CPU配线 ................................................ 4-244.6.1 输入输出点规格................................................... 4-244.6.2 AHxxEMC-5A配线.............................................. 4-274.7 I/O模块配线 ............................................................ 4-30第5章维护与检查5.1 注意事项................................................................... 5-25.2 日常维护................................................................... 5-25.2.1 维护工具............................................................ 5-25.3 定期维护................................................................... 5-35.3.1 维护工具............................................................ 5-3 ii附录A AH Motion Controller系统EMC规范A.1 AH Motion系统EMC 规范............................................ A-2A.1.1 适用于AH Motion系统的EMC规范.......................... A-2A.1.2 EMC规范的安装说明............................................. A-3A.1.3 电缆.................................................................. A-4iiiMEMO iv前言目录P.1 简介 (II)P.1.1 适用产品 (II)P.1.2 相关手册 (II)P.2 关于手册间的交互参照 (III)IAH Motion Controller硬件手册P.1简介感谢您购买AH Motion Controller系列运动控制器,并采用我们为您提供的高端运动控制系统。
中达电通 CNC-H4-T车床系统操作和编程

编程 4内容提要章节标题页码4.1NC编程的基本原理4-24.1.1程序结构4-24.1.2位移指令的绝对值和增量值编程4-44.1.3直径编程和半径编程4-44.2G指令码4-54.2.1G指令码一览表4-54.2.2G0快速线性移动4-64.2.3G01带进给率直线插补4-64.2.4G02,G03圆弧插补4-74.2.5G04 暂停指令4-84.2.6G08 轴向机械坐标清零指令4-84.2.7G28自动回归第一参考点指令4-8G30 自动回归第二参考点指令4.2.8G29 自动由参考点复归4-94.2.9G31 跳跃机能指令4-94.2.10G32恒螺距螺纹切削指令4-104.2.11G33攻丝切削循环4-124.2.12G40 G41 G42 刀具半径补偿4-134.2.13G70 ~ G76 复式切削固定循环4-154.2.14G90,G92,G94 单一切削固定循环4-254.2.15G20/G21 公/英制变换4-294.2.16G50,G96G97主轴最高转速设定及恒线速控制4-294.2.17G98/G99进给率设定4-304.2.18G10资料设定4-304.2.19G65 客户自设程序群(MACRO)指令4-314.3M,S,T指令码4-334.3.1S主轴功能4-334.3.2T刀具功能4-334.3.3M 辅助功能4-334.3.4M 98,M99调用子程序功能4-34注释!:本章介绍了NC编程的基本原理,并对程序和程序段的基本结构以及系统的控制指令做出了必要的说明。
NC编程时的操作方法,参见2.4.5程式编辑。
中达电通CNC-H4-T车床系统操作和编程 4-14.1 NC 编程的基本原理数控车床自动加工零件时需要执行NC程序,NC程序也称为工件程式或者零件程序。
编制的NC程序需要使用各种必要的控制指令,从而满足机床对零件的加工要求。
4.1.1程序结构表4-1 NC程序结构% %和程式号码O****在使用DNC 软件和PC传输时需要,通过系统面板录入程序,正常编程时不需要。
DCS2001系统软件使用说明书(印刷版)
DCS2001系统软件使用说明书(印刷版)DCS-2001分散型控制系统组态及使用说明书天津仪表集团有限公司天津市中环自动化技术控制设备有限公司目录第一章DCS-2001组态软件简介1DCS-2001系统概述----------------------------------------------------------------12DCS-2001集散系统使用语言的层次结构-------------------------------------23“4C”技术是集散系统的技术基础--------------------------------------------3 第二章DCS-2001系统体系结构1 DCS-2001体系结构-----------------------------------------------------------------42 操作站----------------------------------------------------------------------------------63 现场控制站----------------------------------------------------------------------------8 第三章DCS-2001组态系统软件1 DCS-2001系统组态软件结构-----------------------------------------------------102 DCS-2001系统组态软件的特点--------------------------------------------------103 DCS-2001系统组态的流程--------------------------------------------------------114 I/O 参数结构-------------------------------------------------------------------------11 第四章新的工程1 组态窗口的认识----------------------------------------------------------------------122 总体信息组态-------------------------------------------------------------------------143 硬件I/O设置-------------------------------------------------------------------------164 自定义变量设置----------------------------------------------------------------------215 控制回路设置-------------------------------------------------------------------------216 编译及下载----------------------------------------------------------------------------22 第五章操作站组态1 操作小组组态-------------------------------------------------------------------------252 总貌画面组态-------------------------------------------------------------------------263 棒图画面组态-------------------------------------------------------------------------274 趋势画面组态-------------------------------------------------------------------------275 控制画面组态-------------------------------------------------------------------------286 虚拟按钮组态-------------------------------------------------------------------------287 流程图画面组态----------------------------------------------------------------------298 打印报表画面组态-------------------------------------------------------------------319 信息灯报警组态----------------------------------------------------------------------32 第六章控制站组态6. 1 逻辑图组态-------------------------------------------------------------336. 1-1 使用平台-------------------------------------------------------------------336. 1-2 操作步骤-------------------------------------------------------------------336. 1-3 工具介绍-------------------------------------------------------------------346. 1-4 常用功能模块简介-------------------------------------------------------366. 1-5 操作方法-------------------------------------------------------------------416. 1-6 常遇问题-------------------------------------------------------------------446. 2 Smart图组态------------------------------------------------------------456. 2-1 概述-------------------------------------------------------------------------456. 2-2 操作命令使用方法-------------------------------------------------------476. 2-3 控制策略文件的编辑----------------------------------------------------516. 2-4 功能算法模块详细描述-------------------------------------------------536. 2-5 补充说明-------------------------------------------------------------------60 第七章DCS-2001控制系统操作使用说明1 控制系统组成和功能----------------------------------------------------------------672 操作画面功能介绍-------------------------------------------------------------------693 软件安全运行保护-------------------------------------------------------------------80 第八章服务管理软件操作使用说明1概述-------------------------------------------------------------------------------------81 2操作说明-------------------------------------------------------------------------------81第九章事故追忆机软件操作使用说明1软件概述及安装说明----------------------------------------------------------------85 2软件操作说明-------------------------------------------------------------------------85 3辅助说明-------------------------------------------------------------------------------88 附录一:DCS-2001系统软件管理规程--------------------------89附录二:DCS-2001系统硬件管理规程--------------------------94 第一章 DCS-2001组态软件简介1.DCS-2001系统概述:基本概述DCS系统是英文Distributed Control System的缩写,是当代自动化控制技术主导产品。
CP1H MODBUS通讯功能块使用说明
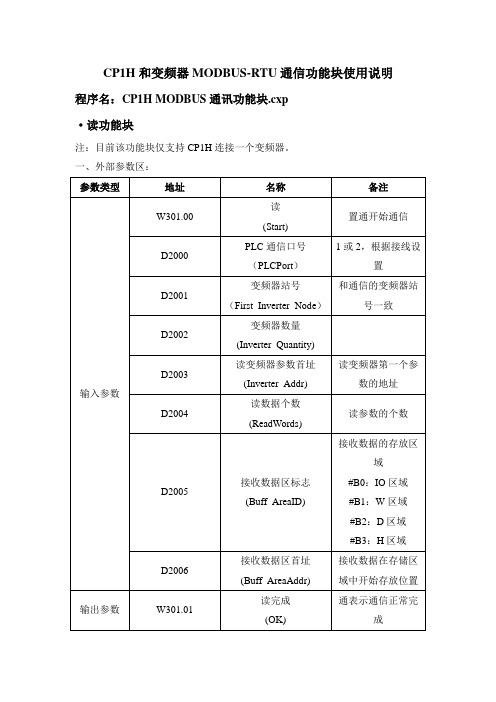
CP1H和变频器MODBUS-RTU通信功能块使用说明程序名:CP1H MODBUS通讯功能块.cxp·读功能块注:目前该功能块仅支持CP1H连接一个变频器。
一、外部参数区:注:1、参数区地址可以更改,可以将D2000-D2009,W301改成别的地址2、关于接收数据存放地址,例:标志为:#B2,首址为:&9950,则接收到的数据存在D9950开始的地址内。
二、接收数据存储区:经验证,本功能块一共输出14组相同的数据。
接收数据区长度为:读数据个数×14。
例:标志为:#B2,首址为:&9950,读个数为:6,则接收数据存储区为:D9950—D10133。
·写功能块一、外部参数区:注:1、参数区地址可以更改,可以将D2000-D2009,W302改成别的地址二、写入数据存储区:写入数据存储区存放要写入变频器的数据。
例:标志为:#B2,首址为:&9900,写入个数为2,则将D9900,D9901中的数据写入变频器中。
·使用说明(读写类似)注:读和写不能同时进行,写完之后可以立即读,但读完之后要有个间隔才能写。
可以通过控制W301.00(读)和W302.00(写)的通断来控制读写。
1、创建功能块:功能块—插入功能块—梯形图,命名为:读变频器2、双击【读变频器】,打开功能块编辑窗口,可以自己编辑功能块3、将别人编辑好的功能块【复制】【粘贴】到自己的程序中4、在通讯段中设置参数内容注:功能块启动信号Start不能上电导通。
5、、在通讯段编辑窗口里面,点击菜单【插入】【功能块调用】,在弹出窗口中输入实例名(如Q1等),选择功能块定义(即使用哪个功能块),确定5、点击参数前面区域,按【回车键】输入各个参数,其中EN接常通接点6、设置通讯口参数和变频器参数,即可开始通信。
CP1H参数设置(和变频器设置一致)串口1/2通信设置:定制波特率:9600 格式:8,1,N 模式:串口网关V1000变频器参数设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内部资料注意保密协议调试手册(中达CUC-01H)中兴通讯股份有限公司版权所有,保留一切权利。
版权所有,侵权必究。
Copyright (C) 1997 by ZTE Co. Ltd..All rights reserved.设备说明MCS6000CUC-01H设备接口描述(尽可能提供设备和接口图片,不同型号设备可能存在差别)(如何判断有无接口板、接口板外观描述)(接口类型、定义)RS232电平;DB9针:2接收、3发送、5地(波特率、数据位、校验位、停止位)波特率9600、数据位8位、无奇偶校验、起始/停止位1位。
(操作步骤、拨码设置等)(特殊说明)调试方法CUC-01H pcudebug.exe无。
发送:aa 00 00 00 07 64 64 30 30 30 30 8f接收:aa 3c 00 17 02 6a 00 00 00 00 00 00 00 00 00 00 01 00 20 1b 00 17 00 39d5 e8 04 4d 3a e9 04 30 4b e9 04 30 4b e9 04 4b 64 20 5c 66 30 7b 01 79 01 78 01 0f 00 0e 00 0f 00 f1 01 02 00 11 89 64 02 02 00 00 00 00 00 01 00 01 00 02 00 89 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 3c 00 17 02 6a 00 00 00 00 00 00 00 00 00 00 01 00 20 1b 00 17 00 39 d5 e8 04 4d 3a e9 04 30 4b e9 04 30 4b e9 04 4b 64 20 5c 66 30 7b 01 79 01 78 01 0f 00 0e 00 0f 00 f1 01 02 00 11 89 64 02 02 00 00 00 00 00 01 00 01 00 02 00 89 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 08发送:aa 00 00 00 07 65 65 30 30 30 30 91接收:aa 3d 00 e0 01 2c 01 26 02 c2 01 3c 00 1e 00 28 00 3f 02 ea 01 07 00 01 00 dc 05 02 00 00 00 00 00 09 00 00 00 00 00 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 d0 07 00 14 c8 00 c8 00 c8 00 c2 01 17 02 34 02 00 00 d6 01 00 00 e0 01 01 00 c8 00 0a 00 0a 00 0c 00 14 00 b8 01 01 00 0e 08 04 10 32 26 e0 01 2c 01 26 02 c2 01 3c 00 01 01 00 10 fa 00 b4 00 0a 00 0a 00 05 00 b0 e6 b1 be a3 ba c4 09 01 01 00 00 b4 00 b8 01 02 00 00 00 18 00 11 89 64 02 00 00 32 00 2c 01 00 00 00 00 00 00 00 00 00 00 00 0000 00 01 00 00 01 00 00 00 00 00 00 00 00 00 00 00 00 3d 00 e0 01 2c 01 26 02 c201 3c 00 1e 00 28 00 3f 02 ea 01 07 00 01 00 dc 05 02 00 00 00 00 00 09 00 00 00 00 00 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 d0 07 00 14 c8 00 c8 00 c8 00 c2 01 17 02 34 02 00 00 d6 01 00 00 e0 01 01 00 c8 00 0a 00 0a 00 0c 00 14 00 b8 01 01 00 0e 08 04 10 32 26 e0 01 2c 01 26 02 c2 01 3c 00 01 01 00 10 fa 00 b4 00 0a 00 0a 00 05 00 b0 e6 b1 be a3 ba c4 09 01 01 00 00 b4 00 b8 01 02 00 00 00 18 00 11 89 64 02 00 00 32 00 2c 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 01 00 00 01 00 00 00 00 00 00 00 00 00 00 00 00 34发送:aa 00 00 00 07 77 77 30 30 30 30 b5接收:aa 40 00 07 00 00 00 00 0d 1c 58 eb 14 00 00 00 10 1d 58 e9 14 00 00 00 0f 1c 58 f4 14 00 00 00 0e 1d 58 ee 14 00 00 00 0f 1d 58 ef 14 00 80 00 0e 1d 58f2 14 00 00 00 0e 1c 58 e8 14 00 00 00 00 00 00 81 81 00 00 00 00 00 00 04 a2 00 00 00 00 00 00 4c 80 00 00 00 00 00 00 44 d6 00 00 00 00 00 00 09 46 00 00 00 00 00 00 04 01 00 00 00 00 00 00 86 8a 00 00 00 00 00 00 0f 0d 00 00 00 00 00 00 80 17 00 00 00 00 00 00 8a 4b 00 00 00 00 00 00 0c 0d 00 00 00 00 00 00 4d 47 00 00 00 00 00 00 15 78 00 00 00 00 00 00 00 22 00 00 00 00 00 00 31 11 00 00 00 00 00 00 49 20 00 00 00 00 00 00 00 10 00 00 00 00 00 00 04 4f 00 00 00 00 00 00 0a 00 00 00 00 00 00 00 0e a6 00 00 00 00 00 00 39 97 00 00 00 00 00 00 84 8a 00 00 00 00 00 00 41 62 00 00 00 00 00 00 86 50 00 00 00 00 00 00 00 27 00 00 00 00 00 00 0a 05 00 00 00 00 00 00 c2 4c 00 00 00 00 00 00 04 92 00 00 00 00 00 00 01 04 00 00 00 00 00 00 02 c1 00 00 00 00 00 00 1b 0c 00 00 00 00 00 00 01 81 00 00 00 00 00 00 85 8e 00 00 00 00 00 00 a4 06 00 00 00 00 00 00 08 51 00 00 00 00 00 00 a3 39 00 00 00 00 00 00 92 0c 00 00 00 00 00 00 9a 10 00 00 00 00 00 00 0f d0 00 00 00 00 00 00 55 dd 00 00 00 00 00 00 18 10 00 00 00 00 00 00 69 09 00 00 00 00 00 00 88 02 00 00 00 00 00 00 8c 28 00 00 00 00 00 00 31 4c 00 00 00 00 00 00 34 08 00 00 00 00 00 00 25 0d 00 00 00 00 00 00 2b 25 00 00 00 00 00 00 52 a0 00 00 00 00 00 00 72 00 00 00 00 00 00 00 c2 42 00 00 00 00 00 00 0a 28 00 00 00 00 00 00 44 95 40 00 07 00 00 00 00 0d 1c 58 eb 14 00 00 00 10 1d 58 e9 14 00 00 00 0f 1c 58 f4 14 00 00 00 0e 1d 58 ee 14 00 00 00 0f 1d 58 ef 14 00 80 00 0e 1d 58 f2 14 00 00 00 0e 1c 58 e8 14 00 00 00 00 00 00 81 81 00 00 00 00 00 00 04 a2 00 00 00 00 00 00 4c 80 00 00 00 00 00 00 44 d6 00 00 00 00 00 00 09 46 00 00 00 00 00 00 04 01 00 00 00 00 00 00 86 8a 00 00 00 00 00 00 0f 0d 00 00 00 00 00 00 80 17 00 00 00 00 00 00 8a 4b 00 00 00 00 00 00 0c 0d 00 00 00 00 00 00 4d 47 00 00 00 00 00 00 15 78 00 00 00 00 00 00 00 22 00 00 00 00 00 00 31 11 00 00 00 00 00 00 49 20 00 00 00 00 00 00 00 10 00 00 00 00 00 00 04 4f 00 00 00 00 00 00 0a 00 00 00 00 00 00 00 0e a6 00 00 00 00 00 00 39 97 00 00 00 00 00 00 84 8a 00 00 00 00 00 00 41 62 00 00 00 00 00 00 86 50 00 00 00 00 00 00 00 27 00 00 00 00 00 00 0a 05 00 00 00 00 00 00 c2 4c 00 00 00 00 00 00 04 92 00 00 00 00 00 00 01 04 00 00 00 00 00 00 02 c1 00 00 00 00 00 00 1b 0c 00 00 00 00 00 00 01 81 00 00 00 00 00 00 85 8e 00 00 00 00 00 00 a4 06 00 00 00 00 00 00 08 51 00 00 00 00 00 00 a3 39 00 00 00 00 00 00 92 0c 00 00 00 00 00 00 9a 10 00 00 00 00 00 00 0f d0 00 00 00 00 00 00 55 dd 00 00 00 00 00 00 18 10 00 00 00 00 00 00 69 09 00 00 00 00 00 00 8802 00 00 00 00 00 00 8c 28 00 00 00 00 00 00 31 4c 00 00 00 00 00 00 34 08 00 0000 00 00 00 25 0d 00 00 00 00 00 00 2b 25 00 00 00 00 00 00 52 a0 00 00 00 00 0000 72 00 00 00 00 00 00 00 c2 42 00 00 00 00 00 00 0a 28 00 00 00 00 00 00 44 95a2发送:aa 00 00 00 07 78 78 01 01 00 00 f9接收:(通讯是否存在时限要求、是否存在控制条件等)通道表(包括物理通道和逻辑通道)---AI通道---AI通道16(双字节331) = 整流模块1电流.AI通道92(双字节418) = 整流模块30电流AI通道126(双字节332) = 整流模块1电压.AI通道155(双字节419) = 整流模块30电压AI通道96(双字节333) = 整流模块1温度.AI通道125(双字节420) = 整流模块30温度AI通道27(双字节151) = 直流系统电压AI通道29(双字节152) = 直流系统电流AI通道30(双字节179) = 电池组1电流AI通道31(双字节193) = 电池组2电流AI通道59(双字节207) = 电池组3电流AI通道60(双字节221) = 电池组4电流AI通道43(双字节178) = 电池温度AI通道44(双字节154) = 环境温度AI通道45(双字节177) = 电池1剩余容量AI通道46(双字节191) = 电池2剩余容量AI通道61(双字节205) = 电池3剩余容量AI通道62(双字节219) = 电池4剩余容量AI通道26(双字节4) = 交流相电压AI通道34(双字节5) = 交流相电流AI通道35(双字节6) = 交流频率AI通道36(双字节1) = 交流AB线电压AI通道37(双字节2) = 交流BC线电压AI通道38(双字节3) = 交流CA线电压AI通道39(双字节7) = 交流A相电流AI通道40(双字节8) = 交流B相电流AI通道41(双字节9) = 交流C相电流AI通道42(双字节10) = 交流频率---AO通道---AO通道80(双字节2635) = 整流模块数量AO通道1(双字节2663) = 电池容量AO通道2(双字节2667) = 温度补偿系数AO通道3(双字节2676) = 电池限流1AO通道4(双字节2677) = 电池限流2AO通道5(双字节2678) = 电池限流3AO通道6(双字节2620) = 电池放电深度AO通道51(双字节2607) = 浮充电压AO通道50(双字节2606) = 均充电压AO通道7(双字节2614) = 电压降值AO通道8(双字节2672) = 放电告警电压AO通道9(双字节2617) = 均衡充电阈值电压AO通道10(双字节2621) = 均衡充电阈值安时数AO通道11(双字节2619) = 均衡充电终止电流AO通道12(双字节2610) = 均充持续时间AO通道13(双字节2609) = 均充周期AO通道14(双字节2622) = 放电不平衡告警点AO通道15(双字节2615) = 低压断开电压(一次下电电压)---DI通道---DI通道16(双字节3000) = 监控模块故障DI通道2(双字节934) = EEPROM参数异常DI通道3(双字节1074) = 非紧急SMR告警DI通道4(双字节1075) = 紧急SMR告警DI通道5(双字节923) = CB/FUSE开路DI通道6(双字节1031) = LVDS开路DI通道7(双字节931) = 电压过高DI通道8(双字节932) = 电压过低DI通道9(双字节1014) = 电池放电DI通道28(双字节1071) = SMR通讯故障DI通道29(双字节753) = AC电压错误DI通道30(双字节726) = AC频率错误DI通道31(双字节1041) = 环境温度错误DI通道32(双字节1015) = 电池温度错误DI通道33(双字节1022) = 电流过流DI通道34(双字节1003) =DI通道35(双字节1004) =DI通道38(双字节924) = 模块均浮充状态DI通道39(双字节1027) = 保留DI通道40(双字节1050) = 保留DI通道41(双字节1077) = SMR高压关机DI通道42(双字节1008) = 电池开关开路DI通道43(双字节1010) = 电池温度传感器DI通道44(双字节1084) = SMR错误DI通道45(双字节1051) = Low electrolyte levelDI通道48(双字节847) = Cell电压高DI通道49(双字节848) = Cell电压低DI通道50(双字节849) = Cell电压高故障DI通道51(双字节850) = Cell电压低故障DI通道52(双字节1083) = 整流模块参数超出范围DI通道53(双字节1016) = 直流侦测板告警DI通道54(双字节1053) = 电池电压低告警(交流供电正常)DI通道55(双字节1052) = BDT故障DI通道158(双字节934) = 系统过载告警DI通道159(双字节1001) = 短路告警DI通道160(双字节1002) = 电池放电告警DI通道28(双字节1092) = 开关整流器1开关状态(0-关机,1-开机) .DI通道107(双字节1817) = 开关整流器30开关状态DI通道78(双字节1094) = 开关整流器1故障(0-正常,1-故障) .DI通道147(双字节1819) = 开关整流器30故障DI通道18(双字节1103) = 开关整流器1告警(0-正常,1-告警) .DI通道117(双字节1828) = 开关整流器30告警DI通道88(双字节1093) = 开关整流器1均浮充状态(0-浮充,1-均充) .DI通道157(双字节1818) = 开关整流器30均浮充状态---DO通道---DO通道(双字节2725) = 均充DO通道(双字节2726) = 浮充DO通道(双字节2721) = 打开所有整流模块DO通道(双字节2722) = 关掉所有整流模块(危险操作,禁止提供)DO通道(双字节2728) = 整流器模块高压关机复位关键及特殊数据(特殊接收函数处理)常见故障(被监控设备监控功能是否可靠)。