AutoMod基本操作与简介
AutoMod基本操作
AutoMod學生版與專業版之切換 (3/3
)
底下的License Server的對話視窗中,只要輸入License Server Name即可;若點選Password Version則會出現輸入授權碼 (Authorization Codes)的對話視窗,使用者需根據購買專業版時, 公司所給予的授權碼輸入textbox中,並檢查其checksum與所附的是 否相同,若有不同一定是輸入錯誤所致。若點選學生版則會自動進入 AutoMod,但會有學生版使用上的限制。
刪 除
AutoMod學生版與專業版之切換 (2/3
)
在上面的Authorization視窗,我們可以根據需求點選所 要設定的版本。例如若要設定為單機專業版則點選 Password Version,若要定義為Server專業版則點選 License Server,若要定義為學生版則點選Student Version即可。
第二節 AutoMod基本架構
Auto Mod
檔案 程序 子 系統 系統 系
統
執行 分析 系統 系統
子系 自系 路統 輸系 天機 橋存 管
模統 動統 線 送統 車系 式槽 線
式
倉 儲
移 動
帶 系
系統 統
起 重系 統
與 儲
第三節 AutoMod基本概念
程序系統(Process System) 搬運系統(Movement System) Loads 擺放Loads的區域(Territory)和空間
關閉AutoMod (1/2)
關閉AutoMod (2/2)
AutoMod學生版限制 (1/4)
在AutoMod的學生版中建構模式會有實 體上的限制,一個模式中實體不能超過 200個,而11.0版以前的版本限制為100 個,這些實體指的就是如人員、設備、 儲存區等等。
Automod中文教程1_Basic(精)

运行窗口的控制
鼠标:
– 左键:主键,可以点选、拖选 – 右键:辅助功能
View Control
– 在左下的快捷工具栏上
跟我做:滚动、视图、选项的作用
7
Applied Materials Confidential
View Control 的快捷键
快捷键
– – – – – – – – s /<Shift>S: 放大缩小 x / <Shift>X:围绕 x-轴 旋转 y / <Shift>Y:围绕 y-轴旋转 z / <Shift>Z :围绕 z-轴旋转 w :turns solids 开关 v :顶视图 top view <control/shift>u :前视图 previous view h:帮助 help
11
Applied Materials Confidential
实体(Loads)的概念
Loads 是模型中的活动单位; AutoMod 是靠实体驱动的,即是“实体”来完成各个进程的逻辑的; 实体所占据的物理上的空间被称为“域territories” Loads在模型中将会有如下行为:
注意:文件命名不能有空格.
modelname.arc目录:
– ASCII 文件; – “Export”的时候生成; – systemname.asy:模型的系统描述文 件 – model.amo:模型文件列表
保存拷贝模型只要 arc目录
3
Applied Materials Confidential
模型与系统(Models & Systems) 进程(Process)的概念 实体(Loads) 和 实体类型(Load Types) 域( Territories )的概念 使用BEdit编写逻辑定义文件 语法Syntax 运行控制
AutoMod系统建模与仿真实验指导书
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
automod

4
Applied Materials Confidential
北京格瑞纳
Name list
Name list:用户定义控制点组
– named list可以插入到其它行程表 – named list可用来定义开始仿真时车辆位置 – 模型中可以有多个named list
机车如何使用Name list:
– – – – – – – – 从运动系统面板中选择work list 单击new 选择想创建work list的地点 单击new 单击Add After 在Add work list窗口中选择地点,单击Add 对要添加到此点的所有点重复此操作 完成单击Done
7
Applied Materials Confidential
– 机车寻找工作或者停车的一系列地点 – 基础行程安排将要使用行程表
机车如何使用形成安排列表
– 机车形成安排列表是所有机车的参数,机车通过搜寻机车形成安排表寻找 工作和停车地点 – 例如:AGV.cp1 – 当机车通过搜寻机车形成安排表找到工作时,自动生成工作任务
2
Applied Materials Confidential
12
Applied Materials Confidential
北京格瑞纳
行程表选择
List contents:
– All – Name list – 控制点
List modifiers
– Closer than – Order than
List search options:
5
Applied Materials Confidential
北京格瑞纳
创建name list
创建name list的方法
AUTOMODE 课件
2011-9-8
物流仿真
2
1 AutoMod 操作
启动 AutoMod AutoMod的文件结构 导入模型 编译模型 运行窗口控制:鼠标和 View Control 运行 AutoMod模型 模型中的实体
2011-9-8
物流仿真
3
1.1 导入模型Import model
菜单: 菜单:Model Open; AutoMod安装目录\demos\gswa\examp02-1\ 正确结果: 显示loading信息 importing or reading the different systems creating entities and paths 显示模型窗口编辑窗口
2011-9-8
物流仿真
30
建立进程 步骤1:模型编辑处于Process系统窗口; 步骤2:Process工具条,Processes New; 步骤3:键入要新建的进程名称,如Pstart ;
2011-9-8
物流仿真
31
建立Load 步骤1:模型编辑处于Process系统窗口; 步骤2:Process工具条,Loads New; 步骤3:键入要新建的Load名称,如L_start; 步骤4:设置其他属性,如产生属性,起始Pstart,每5 分钟产生1个; 步骤5:保存;
2011-9-8 物流仿真 29
作业1
平均间隔5分钟(按照指数分布exponentially distributed ),有1辆卡车到达; 卡车将等待7-13分钟(按照distributed uniformly分布 ); 向消息窗口输出等待的信息; 等待结束后,卡车离开系统。 (建议加上两个Queues,便于看效果)
2011-9-8
物流仿真
第一章模拟与Automod模拟软体

AutoMod
Step3 資料收集
(2ห้องสมุดไป่ตู้2)
輸入的資料包含:
歷史資料(historical data)
模擬政策(policies) 隨機程序與資料(random) 常數(constant)
資料的定義更要明確,譬如停機時間是否包括設備修理時
間、而設備修理時間是否也包括等待物料及修理人員的時
使用統計分析去獲得模式正確的結果。
AutoMod
Step10 模式額外的執行
根據模擬完成後的分析,決定是否需要增加額外
的運轉測試,而這些額外的測試可能必須再重新
設計模式的某一部份,並回步驟八的實驗設計階
段,重新定義實驗設計的內容。
AutoMod
Step11 書面報告整理
將結果以書面方式紀錄下來,可在未來參酌或修改模式時,
AutoMod
Step12 模式結果的執行
最後執行階段的成功端賴前述十一項步驟的實施
的程度,若最終使用者在模式建立階段能參與並
了解模式本身的特性與結果,則模式執行階段的
構的模式,是否能真實描繪出實際系統的特性與
彼此之間行為。確認模式的專業人員必須評估模
擬的程序 (procedures) 與語法 (algorithms) ,是否能
適當表達出模式定義範圍內所模擬的系統的行為。
AutoMod
Step8 實驗設計
經過模式驗證與確認的步驟後,我們即可設計適
當的實驗程序以分析系統的行為與結果。其中系
AutoMod
第一節 模擬基本概念
(5/5)
AutoMod 雖然建模的過程是以圖示的方式來建構,
automod简体中文教程 3_Conve

12
Applied Materials Confidential
系统定义的属性
load type
─ 保存实体类型名称的字符串属性
priority
─ 保存优先级的整型属性,缺省值为0
current process
─ 单元类型属性,保存load所属的当前进程
absolute clock(ac)
– 记录系统从仿真开始的时刻经过的时间
11
Applied Materials Confidential
语法 if … then … else
if 关系式 then 命令语句 else 命令语句 if 关系式 then 命令语句 else if 关系式 then 命令语句 else 命令语句 复合语句 if 关系式 then begin 命令语句1 … 命令语句n end 命令语句超过2 命令语句超过2个的时候要用到 复合语句
4
Applied Materials Confidential
Conveyor 画图工具条
跟我做:新建模型,新建conveyor系统:conv1; 进入conveyor编辑窗口,出现画图工具条
– – – – – – Single line: 单一直线 Single arc:单一圆弧 Continuous:连续的 Connected:连接的 Fillet:链接,剪切 Station:位置点
16 Applied Materials Confidential
8
Applied Materials Confidential
语法: 语法:move into
move into
– 作用:将实体移动到新的域( territory)中; – 语法: move into 下个域的名称 ; – 域的命名规则: systemname.stationname
Autoform全教学教程中文

夹紧点
夹紧类型
增加夹紧点
接着我们再说下Pilots,它的意思是导向销的意思,有点类似定位销的概念,你可以形象 的将它理解成冲压件检具上定位销,设置在孔里也可以设置在边界,一样的不能过定位, 也不能定位不完全.设置于前面的Clamps的类似。如下图:
导向销
导向销直径
导向销方向,可 以从外部复制
从外部导入
整形凹模1
压料体
整形凹模2
修边后的产品
凸模
接下来,我们设置工具,一般情况和前面的一样,一个closing ,一个forming , 行程均为200,如下图所示:
压料力与凸模闭合过程
凹模下走开始整形过程
压料力的设定
为凹模和压料体行 走的距离
不过需要注意的是这里还需要在closing之前加一个定位,防止一开始板料和工具穿 透,我们加一个position工序如下图:
可以输入孔的 坐标点
导向销可以进入曲线管理器,从 外部导入设置好的导向销位置
前期设置结束了,我们可以直接提交计 算了,接着就是如何检查回弹情况了。
我们打开Results窗口栏里面的回弹窗口springback,我们得到如下的窗口,我们一 个一个来说,第一个是Main,这里我们可以检查回弹前后板料各个方向的偏离量,角度 等等。下面我们挨个说明.
下面是重点的回弹工序设置,AutoForm的回弹分两大种类型,一是自由状态(无约束 条件),另一个是强制约束,我们先说第一种类型,自由状态无须进行其他设置,可 以直接提交计算,强制约束需要设置约束条件(后面详细说明),另外还需设置工具 是否激活,一般情况我们需要激活它,当然不激活它也没啥问题,但是后面你如果想 比较回弹量就不能拿它当参照了,如下图所示:
点击增加拉延工序, 并确定
Auto mod的简单操作指南
Auto mod课程笔记1、auto mod快捷键⑴s:放大Shift + s:缩小⑵x:沿着x轴旋转(顺时针)Shift + x :沿着x轴旋转(逆时针)⑶y:沿着y轴旋转(顺时针)Shift +y :沿着y轴旋转(逆时针)⑷z:沿着z轴旋转(顺时针)Shift +z :沿着z轴旋转(逆时针)⑸w :将原来的框架状的实体填充为完整实体,即“turn solids”⑹v :顶视图,相当于“top view”⑺h :帮助⑻p :开始运行模型,相当于“continue”⑼d :程序运行速度减慢Shift + d :程序运行速度加快⑽g :程序仿真运行结束,相当于“turn off animate”⑾ctrl + m :先选中相应的程序段,然后同时按ctrl + m,则可以将相应的程序段变为注释语句,主要用于修改、检查source file中的程序的错误。
2、每个模型只有一个process(逻辑控制系统),但每个process含有多个子processes,即是编辑界面左边的命令框中通过点击process按钮建立的子processes3、load表示处于物流中的“物”,而processes这些子进程是针对load的4、load实体占据的空间称为“域territories”,没有load,则进程不会被执行。
5、auto mod 建模过程⑴打开auto mod程序⑵选择“file”中的“new”,建立新的仿真文件夹和仿真文件,切记文件和文件夹必须为英文字母,不能使用中文汉字等。
⑶点击编辑界面左边命令框中的“process”命令按钮,根据需要建立子进程⑷点击编辑界面左边命令框中的“load”命令按钮,根据需要建立进入本物流系统的物品,并通过点击弹出对话框中的“new creation”进行参数设置。
其中应:点击“first process”命令按钮,确定该物品所需要经历的第一个进程通过选择“distribution”,确定该物品的到达概率分布。
automod教学大纲
automod教学大纲自动化模块(AutoMod)是一种强大的工具,用于模拟和优化物流和生产系统。
它可以帮助企业提高生产效率,降低成本,并提供精确的数据分析。
本文将介绍AutoMod的教学大纲,以帮助初学者快速上手并掌握这一工具。
1. AutoMod简介- AutoMod是由Automated Systems, Inc.开发的一款模拟软件,用于模拟和优化物流和生产系统。
- 它可以模拟各种工业环境,包括制造、仓储、物流等,并提供详细的数据分析和可视化结果。
2. AutoMod的基本操作- 安装和启动AutoMod软件。
- 创建新模型或导入现有模型。
- 添加和配置设备、工作站、运输工具等。
- 设定物料流动和作业流程。
- 运行模拟并分析结果。
3. AutoMod的高级功能- 使用AutoMod的建模语言(ModL)进行自定义建模。
- 添加逻辑和规则,如优先级、条件、约束等。
- 使用统计分析工具进行数据分析和优化。
- 进行实时仿真和虚拟现实(VR)交互。
4. AutoMod的应用领域- 制造业:优化生产线布局、提高生产效率、降低生产成本。
- 仓储与物流:优化仓库布局、提高货物处理效率、减少运输时间。
- 物料处理:优化物料流动、减少库存、提高物料处理效率。
5. AutoMod的案例研究- 案例一:某制造企业使用AutoMod优化生产线布局,减少工人等待时间,提高生产效率20%。
- 案例二:某仓储企业使用AutoMod优化仓库布局,减少货物处理时间,降低运输成本10%。
- 案例三:某物料处理企业使用AutoMod优化物料流动,减少库存,提高物料处理效率30%。
6. AutoMod的学习资源- 官方网站提供的教程和文档。
- 在线论坛和社区,与其他用户交流和分享经验。
- 培训课程和认证考试,提供专业的培训和认证。
7. AutoMod的未来发展- 自动化技术的不断进步将推动AutoMod的发展。
- 与其他软件和系统的集成,实现更高级的自动化和智能化。
automod整体介绍
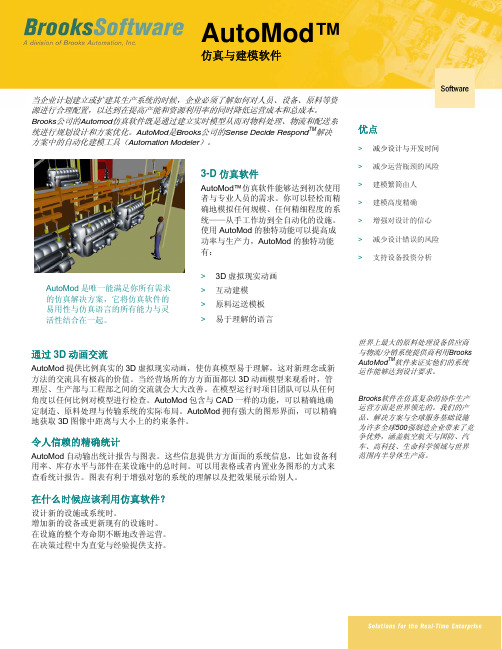
AutoMod™ 仿真与建模软件优点> 减少设计与开发时间> 减少运营瓶颈的风险> 建模繁简由人> 建模高度精确> 增强对设计的信心> 减少设计错误的风险> 支持设备投资分析世界上最大的原料处理设备供应商与物流/分销系统提供商利用BrooksAutoMod TM软件来证实他们的系统运作能够达到设计要求。
Brooks软件在仿真复杂的协作生产运营方面是世界领先的。
我们的产品、解决方案与全球服务基础设施为许多全球500强制造企业带来了竞争优势,涵盖航空航天与国防、汽车、高科技、生命科学领域与世界范围内半导体生产商。
当企业计划建立或扩建其生产系统的时候,企业必须了解如何对人员、设备、原料等资源进行合理配置,以达到在提高产能和资源利用率的同时降低运营成本和总成本。
Brooks公司的Automod仿真软件既是通过建立实时模型从而对物料处理、物流和配送系统进行规划设计和方案优化。
AutoMod是Brooks公司的Sense Decide Respond TM解决方案中的自动化建模工具(Automation Modeler)。
通过3D动画交流AutoMod提供比例真实的3D虚拟现实动画,使仿真模型易于理解,这对新理念或新方法的交流具有极高的价值。
当经营场所的方方面面都以3D动画模型来观看时,管理层、生产部与工程部之间的交流就会大大改善。
在模型运行时项目团队可以从任何角度以任何比例对模型进行检查。
AutoMod包含与CAD一样的功能,可以精确地确定制造、原料处理与传输系统的实际布局。
AutoMod拥有强大的图形界面,可以精确地获取3D图像中距离与大小上的约束条件。
令人信赖的精确统计AutoMod自动输出统计报告与图表。
这些信息提供方方面面的系统信息,比如设备利用率、库存水平与部件在某设施中的总时间。
可以用表格或者内置业务图形的方式来查看统计报告。
图表有利于增强对您的系统的理解以及把效果展示给别人。
automod简体中文教程 7_ASRS

货区(Zones) 货区 由若干货位组成
9
Applied Materials Confidential
10
Applied Materials Confidential
语法
move into wh.pd1(2) Move into wh.zone1(1) Move into wh.zone1(AisleNumber,bay,tier)
14
Applied Materials dential
货区的设置
15
Applied Materials Confidential
速度参数设置 Horizontal Velocity: 180m/min Vertical Velocity: 85 m/min 工作点
– Pd1:bay 0,Tier 1
11
Applied Materials Confidential
堆跺机(S/RM) 堆跺机 建立AS/RS后,堆跺机自动建立 与Pathmover系统中的小车类似 -注意:每巷道只有一台堆跺机 堆跺机参数与load type相关
12
Applied Materials Confidential
作业(model_asrs)
4
Applied Materials Confidential
5
Applied Materials Confidential
6
Applied Materials Confidential
货位(P&D) 货位 取、放货物的位置
7
Applied Materials Confidential
8
Applied Materials Confidential
AS/RS 概述 续) 概述(续 AS/RS与Pathmover相似 -货架与路径 -货格、货格区与控制点 -堆跺机与小车
Autoform全教程

第二个:Material displacement 很简单了指回弹前后板料偏移量,有4个方向,分别为 X,Y,Z以及垂直方向,与第一种类似可以自定义, 如图; 1
垂直方向
2
自定义方向
第三个:Material deformation 主要是测量角度的,angle change是指blank中某单元 回弹前后的夹角;draw angle change是指blank中某单元回弹前后的夹角(以拉延方向为 参考);Curvature change是指回弹前后板料中某单元曲率的变化大小;最后一个Strain change是指blank中某单元回弹前后应变的变化。如下图: 1
要整形的面
增加整形
下面进行工具的设置,首先为凸模工 具的设置。Fra bibliotek凸模的设置
选择新建整 形的工艺面 凸模静止不动
可以调整整形的方向,此件 为正向整形,不需要改动
下面为凹模工具的设置
凹模的设置
凹模的行程位置
下面为压料体模工具的设置
压料体的设置
也可以用此命令选择
压料体的行程位置
下面是设置好的工具,如图所示:
前期设置结束了,我们可以直接提交计 算了,接着就是如何检查回弹情况了。
我们打开Results窗口栏里面的回弹窗口springback,我们得到如下的窗口,我们一 个一个来说,第一个是Main,这里我们可以检查回弹前后板料各个方向的偏离量,角度 等等。下面我们挨个说明.
ref geom不激活时,此项无法使用
强制约束 自由状态
不激活
激活
自由状态下强制约 束无法使用
我们选择Constrained 则约束选项启用,我们必须进行约束的设置,如下图:
强制约束
系统仿真原理与应用-实验指导书
AutoMod仿真实验指导书二○○四年实验一建立基本仿真模型1. 实验目的仿真基本概念和思想的感性认识学习AutoMod的使用:基本操作,分布函数,基本语句掌握Conveyor系统建模掌握分布函数的应用2. 实验内容建立一个银行营业所运行状况的简单模型。
该营业所有3个服务台,其中1个是只办理外币服务台,3个出纳员,顾客到达后按照人民币业务和外币业务排成2个队列。
假定:每个出纳员服务一个顾客的时间为2至5分钟的均匀分布;每次到达1名顾客,到达间隔为均值为4分钟的指数分布;办理人民币与外币业务的顾客数为4:1。
分析该营业所在八小时内的运行状况。
3.实验步骤:1)按照顾客到达、等待、接受服务、离开的流程来描述系统。
2)新建一个模型,定义一个process系统。
3)定义load进入系统时,要到达的第一个process。
4)将顾客定义为load,定义代表顾客的图形。
5)在源文件(source file)中定义系统运行的逻辑,可以有一个或多个arriving procedure来描述系统运作的流程。
使用Move into,send to,travel to等语句。
6)运行模型,分析运行结果。
4.思考题1)统计:在八小时内,3位出纳员的工作时间,能够为多少顾客提供服务,顾客等待的平均队列长度。
2)设定顾客到达间隔为均值为3、5分钟的指数分布,比较这两种情况下该营业所的运行状态。
提示:◆AutoMod中各个单元的命名原则为:用系统保留单词的大写首字母(或者前几个字母,第一个大写)加下划线加一个给定的名称,下划线之前标明它是什么类型的单元,如L 代表是load,conv代表是传送带系统,P或Proc代表process,A代表attribute,V代表变量,Vech代表小车,等等◆stream的定义是在process的pallete上的random stream的弹出菜单中定义的。
实验二 传送带系统仿真1.实验目的通过建立一个传送带系统,学习AutoMod 提供的conveyor 系统建模;使用AutoMod 提供的图表;进一步学习模型调整与系统优化。
process(AUTOMOD automod)
跟我做:在你的logic.m中继续键入 begin Pstart arriving wait for uniform 10,2 min print this load “ was just delayed” to message
/*会在消息窗口( message window)中显示如下消息:“实体ID名称 was just delayed” */
20
Applied Materials Confidential
wait for
跟我做:在你的logic.m中继续键入
begin Pstart arriving
wait for uniform 10,2 min /*等待一个时间段,长度是(2,10)的Uni分布,单位是分钟*/
end
注意.这里为Pstart进程加了一行执行逻辑,表示
11
Applied Materials Confidential
实体( 实体(Loads)的概念 )
Loads 是模型中的活动单位; AutoMod 是靠实体驱动的,即是“实体”来完成各个进程的逻辑的; 实体所占据的物理上的空间被称为“域territories” Loads在模型中将会有如下行为:
/*the logic for the process called Pstart will be here这段是注释文字,不需键入*/
end
注意.这是每个进程的逻辑语言的套路
– – – – – 该进程名称:Pstart 在begin和end行之间的逻辑将是该进程会执行的行为,可以为空 begin和end必须成对使用 程序注释可以用/*被注释的内容*/ 注释最好用英文
新建你的第一个模型中的逻辑文件
跟我做:
AutoMod软件综述(中文)

2002年冬季仿真会议记录基于AutoMod的模拟现实马修W·罗勒伊恩W·M格雷戈尔布鲁克斯——PRJ自动化所规划和物流解决方案组美国,犹他州84116,盐湖城,5245耶格尔号摘要最近几年,在工业上的决策变得越来越复杂。
客户要求越来越苛刻,市场竞争越来越激烈,劳动力和原材料成本也在不断上升。
管理者需要国家最先进的工具来辅助规划、设计和设施控制方面的操作。
仿真提供了一个测试新方案和提高性能的虚拟工厂。
来自布鲁克斯——PRJ自动化所的Automod产品套件已经被应用在上千个项目中来帮助工程师和管理者们尽最大可能做出最好的决策。
随着2002年Automod11.0版本的发布,Automod已经能够支持分层模型的建设。
这种新的架构允许用户将模型对象重用在其他模型中,减少了建立一个新模型所需要的时间。
复合模型是使Automod成为最广泛使用的模型之一的最新成就。
1、引言在仿真工具方面,Automod是世界上独一无二的。
它允许用户构建任何规模和复杂性的模型,这些模型不仅用于规划和设计,还可以用于每天日常运作的分析以及测试和发展的控制。
如图1所示,Automod结合3D图形与最全面的一套模板和对象,可以用于许多不同应用程序的建模。
鉴于Automod仿真细节的能力,它已经成为需要最大限度发挥他们的模型建设投资回报率的严格仿真从业者的首选工具。
AutoMod的架构也允许模型对象的重用,从而减少建立一个模型所花费的时间。
Automod也可以通过ActiveX与其他软件连接,从而可以辅助创建能够广泛适用于从工厂经理到区主管使用的仿真工具。
到现在,仿真技术不仅仅是应用到规划和设计,Automod已经面临着支持更加广泛应用的功能的挑战。
图1:Automod的3-D图形显示Automod的产品套件包括:•AutoMod——模型构建和模型执行环境•AutoSat——统计分析(包括优化)•AutoView——动态运行,AVI支持的动画显示•模型通信模块(MCM)——链接到第三方的软件,包括用于过程控制的OLE协议(OPC)——例如用于测试控制系统。
仿真(AUTOMOD automod)

AutoMod基本操作與簡介這一章的內容主要分成三個部分,第一節AutoMod基本操作主要是讓初學者能儘快地熟悉AutoMod軟體的操作環境,包括如何去開啟一個模式、建構一個模式等等,第二節AutoMod基本架構主要是讓使用者了解各系統模組的功能及特性,第三節AutoMod基本概念則是建立使用者在使用AutoMod建構模式時應該了解的基本概念。
2-2第一節 AutoMod 基本操作在本節中我們將針對AutoMod 的基本操作進行初步的介紹,包括如何開啟AutoMod 的介面、如何開啟一個模式、如何儲存一個模式,以及如何執行一個模式等相關的操作。
學習任何一套軟體的使用,初學者必須身體力行,花時間努力的研究並且實際去動手體驗,才是學習好軟體的不二法門。
學習AutoMod 當然也不例外,因此讀者若願意多花些時間研讀本書的內容,並且遵循書中的內容多做練習,相信即可以透過AutoMod 建構出有效的模式。
在安裝AutoMod 時,可選擇Standard(標準)模式或VR(虛擬實境)模式,其中本書的範例是以AutoMod 安裝在C 磁碟機及VR 模式呈現,所有範例皆可在AutoMod 11.0以上的版本實際練習與操作。
2-1-1 AutoMod 環境在整個AutoMod 軟體中,主要可分成兩個環境,編輯環境及模擬環境,其中: 編輯環境:提供使用者建構模式的環境及各項參數的設定。
模擬環境:可利用模擬環境進行模擬以獲得相關的統計資料,並將模式以動畫的方式呈現。
2-1-2 開啟AutoMod當你順利完成AutoMod 的安裝後,在程式集中點選AutoMod 12.0 (VR Graphics)中的AutoMod 選項即可打開AutoMod 的編輯介面。
這個編輯介面就是建構模式及定義模式相關參數的環境。
AutoMod 編輯介面AutoMod 基本操作與簡介2-32-1-3 建構模式要在AutoMod 的編輯介面中建構一個模式,你可以選擇建構一個新的模式或是開啟舊模式進行編輯。
AutoForm R6基本操作和设置

入口
小的高度策略
增大圆角
保持圆角( 入口向下)
约束 挺举
2.11.3 拉延筋的设置
自适应线 拉延筋
实用文档
转下页
拉延筋最 大挺举力
2.11.3 拉延筋的设置
实用文档
一般通过修改筋的高 度来调整筋阻力系数
阻力系数
实用文档
2.11.4 定位销的设置 如果压料面有高低差,压料过程中料片攒动,需要加上定位销。
对拉延和成形零件检查基本的零件成 型型和评估最小料片
添加料带方案
评价级进模零件最小料片和定 义料带方案
选择2次成形面
选择基本面 本步骤前提
选择应用
实用文档
2.7 生产线的布置 这里可以添加、删除工序 如下图我们添加了拉延、修边冲孔、翻边、回弹进行分析。
生产线:需要哪个 工序就把相应的工 序内容拖拽进来。
实用文档
斜楔角度
2.13 翻边整形
工具体名称 可使用汉字
压料体
翻边刀块 凸模
实用文档
选择几何体 具体设置同 修边(2.12)
实用文档
2.14 CAM选项 方位角表示将切边方向投影到XY平面的方向与X 轴夹角,倾斜角表示切边方向与XY平面的夹角。
Autonomy 快速使用手册

Autonomy Connected Backup 快速使用手册
1 如何备份
1
点击“备份设置◆”选项卡,请根据自己的需要选择备份的文件夹或文件,如果不做任何修改,将只备份软件默认选择的文件夹或文件。
2 请点击“立即备份”按钮开始备份。
2 如何设置自己的定期备份
您可以在“工具”菜单->点击“备份进度表”中为您的电脑设置备份计划,也可以在“摘要”选项卡中的“备份进度表”面板中的“计划链接”。
♦
◆
3如何恢复已备份文件
1您可以很轻松的恢复已经备份的文件和文件夹,单击主界面“检索”选项卡。
选文件或者子文件夹,然后点击检索按钮
点击“检索”
4恢复完成
4如何查看历史记录
使用历史记录“选项卡”中包含在备份、恢复、账户注册、账户恢复、账户软件升级或者文件列表同步过程中的事件的列表。
其中包括内部诊断。
您可以通过历史记录选项页来确定事件是成功了还是有错误发生。
以一个备份事件为例,您能够看到那些文件被成功的备份,那些文件由于系统文件没有能够备份。
历史记录选项页是以时间顺序排列的,最近发生的时间将会显示在列表的上头。
要事件进行排序,请单击列表额列标题中的表头。
将事件按降序顺序排序时,一个向下的箭头会显示在
表头;将事件升序顺序排序时,一个向上的箭头会显示在表头。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序系統 (Process System)
(2/2)
Process(流程程序):模式中控制Loads移 動的程序,一個模式雖然只有一個程序系 Loads(工作主體):模式中模擬的主體, 統,但該程序系統可包含一個以上 如零組件、原物料、顧客等,以及設定各的 Resources(資源或設備):模式中處理Loads Process,也是撰寫程式邏輯的地方。 States(狀態):為顯現Resources或搬運系統 種Loads屬性(Attributes)的地方。 所需要的資源,如機器設備、作業人員等 在模擬過程中的各種狀態,可依系統預設 Queues(等候區):Process System中唯一的 ,以及各種資源屬性設定的地方,如資源 Order Lists(命令列表區):一種邏輯暫存區 的定義來顯現各種狀態,或自行定義各種 territory,也是模擬模式中Loads等待的區 的個數、資源容量、加工時間等等。 ,在配合作業需求下使Loads移動或等待的 Blocks(區塊):模式中用來控制長方體區塊 所要呈現的狀態。如Resources是工作中、 域,可當作為模式中的暫存區。 Variables(變數):模式中全域型變數(global 工具。可用來暫存Loads並使Loads在適當情 內允許Entities數量的實體工具,以用來控 閒置中或維修中等,也可進行各種狀態的 variables)的設定,模式執行完畢後AutoMod Counters(計數器):一種類似正整數變數的 況下,繼續其作業或被指示到其他的流程程 制模式中Loads或車輛碰撞的情況。 統計結果,如工作站或輸送帶之總作業時 Functions(函數):用來啟動某種作業進行或 並不會統計其值。 計數器,可當作資源的處理容量(capacity)來 序,也是將模式由推式(push-type)轉變成拉 間、閒置作業時間、維修作業時間等。 是數學運算的一種集合指令,與一般程式中 Subroutines(副程式):不同的程序須處理相 使用,或用來計算一連串的物品通過作業處 式(pull-type)的一種實體邏輯工具。 的函數有相同意義,只是AutoMod內定了很 同的動作時,可使用subroutines以減少程序 Source Files(程式來源檔案):用來撰寫模式 理的數目,模式執行完畢後會有相關的統計 Label(標籤):可用來將模擬的訊息,動態 多系統的Functions,能以程式的方式呼叫, 的撰寫,並使未來模式的維護更為便利,與 程序(procedures)及functions與Subroutines的 資料。 資訊顯示在模式執行的視窗上的一種實體工 Tables(資料表格):可將模擬所得到變數的 以進入到模擬事件(event)或狀況(status)的階 一般程式中的副程式有相同的用途。 地方。 Type(格式):為一種屬性、變數及函數的輸 具。 資料,以頻率表格(frequency classes)的方式 層,對模式作進一步彈性與深入的控制。 Business graphics(商業統計圖表):提供 入標準格式。 序 , 與 一 般 統 計 上 所 用 的 Random streams(亂數串列):亂數串列取樣 將如pie 分 類 排 資 料 chart、bar chart、time line等模擬過 Run的設定。 Control(執行控制):模擬時間 histogram有相似的功能,但允許我們作詳細 程中變數或Entity屬性的動態統計數據圖 、次數、統計資料等的設定。 的設定。 表。
Translate:圖形沿著不同軸線(X,Y,Z)移動。 Child Windows on Top:勾選此選項後,可以讓Process system視 窗及View Control視窗置於所有視窗的最上面。 Solid:勾選此項後所有實體都將會變成實體(Solid)的,若清除此 項則所有實體都將變成線框架構(Wire-frame)。
AutoMod
第四節 範例練習
(1/2)
模組一:AutoMod的簡介 - 建構你的第一個 AutoMod模式
系統概況:本模式主要模擬貨車進入工廠的停車場的
作業,系統的效能主要為工廠大門檢核資料文件的使 用率,以及停車空間的數量。
系統描述:假設貨車以指數分佈平均每6分鐘的速度到
達一部,在進入工廠前需在門口查核文件,所需時間 為常態分配平均5分鐘,標準差為1分鐘。在進入工廠 後停在有四個停車位的停車區卸貨,平均每部車卸貨 時間為均勻分配15 – 25分鐘,之後貨車即離開工廠。
Friction:勾選此項,當你在調整調整圖形大小或旋轉圖形時,滑 鼠放開改變即停止,反之若清除此項,當你在調整調整圖形大小 或旋轉圖形時,必須按空白鍵或去勾選Friction選項,其改變動作 才會停止。
AutoMod
改變視野(view)
(4/4)
Axis Display:若勾選此項可將X、Y、Z軸線顯示出來。
設定的版本。例如若要設定為單機專業版則點選Password
Version,若要定義為Server專業版則點選License Server, 若要定義為學生版則點選Student Version即可。
AutoMod
AutoMod學生版與專業版之切換
(3/3)
底下的License Server的對話視窗中,只要輸入License Server Name即 可;若點選Password Version則會出現輸入授權碼(Authorization Codes) 的對話視窗,使用者需根據購買專業版時,公司所給予的授權碼輸入 textbox中,並檢查其checksum與所附的是否相同,若有不同一定是輸 入錯誤所致。若點選學生版則會自動進入AutoMod,但會有學生版使 用上的限制。
AutoMod
The End
AutoMod
AutoMod環境
在整個AutoMod軟體中,主要可分成兩個環境:
編輯環境
提供使用者建構模式的環境及各項參數的設定。
模擬環境
可利用模擬環境進行模擬以獲得相關的統計資料,
並將模式以動畫方式呈現。
AutoMod
執行模式
(1/3)
AutoMod
Top:從正Z軸方向觀察實體。
Front:從負Y軸方向觀察實體。 Bottom:從負Z軸方向觀察實體。
Back:從正Y軸位址觀察實體。
Right Side:從正X軸位址觀察實體。 Left Side:從負X軸位址觀察實體。 Create Views:透過此選項可以建立一個適當的視野,並儲存起來 以供下次使用,不需浪費時間再做一次調整。 Set Limits:此選項允許調整編輯介面中,格線區域大小。
橋 式 起 重 機 系 統
管 線 與 儲 存 槽 系 統
AutoMod
第三節 AutoMod基本概念
程序系統(Process System)
搬運系統(Movement System)
Loads 擺放Loads的區域(Territory)和空間(Space) 系統命名習慣 Entity命名習慣
執行模式
(3/3)
狀態視窗
訊息視窗
模擬視窗
AutoMod
啟動模擬/暫停模擬
(1/2)
AutoMod
啟動模擬/暫停模擬
(2/2)
AutoMod
調整模擬動畫速度
(1/2)
AutoMod
調整模擬動畫速度
(2/2)
改變模擬動畫的速度
AutoMod
3-D模擬動畫開關轉換
(1/2)
AutoMod
3-D模擬動畫開關轉換
改變視野(view)
控制快速鍵 關閉AutoMod AutoMod學生版限制 AutoMod學生版與專業版之切換
AutoMod
第二節 AutoMod基本架構
AutoMod
檔案系統
程序系統
子系統
執行系統
分析系統
子 模 式
自 動 倉 儲 系 統
路 線 移 動 系 統
輸 送 帶 系 統
天 車 系 統 系 統
大寫的Y
大寫的Z 大寫的I 大寫的J 大寫的K 小寫的v
以負的Y軸方向旋轉
以負的Z軸方向旋轉 以負的X軸方向移動 以負的Y軸方向移動 以負的Z軸方向移動 回到原始設定的上視畫面
小寫的y
小寫的z 小寫的i 小寫的j 小寫的k 小寫的w
以正的Y軸方向旋轉
以正的Z軸方向旋轉 以正的X軸方向移動 以正的Y軸方向移動 以正的Z軸方向移動 可切換以Solid(實體)或 Wire-frame(線框)呈現。
AutoMod關閉Au来自oMod(1/2)AutoMod
關閉AutoMod
(2/2)
AutoMod
AutoMod學生版限制
(1/4)
在AutoMod的學生版中建構模式會有實體上的限
制,一個模式中實體不能超過200個,而11.0版以
前的版本限制為100個,這些實體指的就是如人員、
設備、儲存區等等。
若要檢查模式中實體的數量可藉由下列步驟來進
行:
AutoMod
AutoMod學生版限制
(2/4)
AutoMod
AutoMod學生版限制
(3/4)
當你載入一個模式或者去執行、儲存、增加實體到一個實體數
量大於200的模式時,Entity Limit Status視窗就會出現。另外當
你在建構模式時,實體若到達可用實體的50%、75%及最後10 個時,Entity Limit Status視窗也會出現提醒你。如果你希望不
(2/2)
AutoMod
改變視野(view)
(1/4)
旋轉X軸
放大縮小
旋轉Y軸
AutoMod
改變視野(view)