S120设置
S120变频器调试步骤及故障处理汇总2

故障处理S120变频器调试步骤及故障处理1.调试设备:连铸公用及铸流部分电机的控制变频器(S120变频器)79台。
其中:铸流部分:塞棒1和塞棒2(2台),5个拉矫直机(5台),1个中间辊道(5个),1个串前辊,1个串后辊,1个输出辊道(7台),2.调试进行前首先将电机接手拆除,电机轴用手可以盘动,说明旋转没有阻力,调试才可以进行。
3.将电机及控制参数设置:(1)检查设备清灰(2)上电控制电源,先将源参数上载保存。
(3)恢复工厂设置:在线点击恢复工厂设置即可。
(4)优化参数过程:首先离线将电机参数赋值:P304=电机额定电压P305=电机额定电流P307=电机功率P308=电机功率因数P310=电机额定频率P335=电机冷却类型P320=电机励磁电流P322=电机最大速度P352=电缆电阻P353=电机串联电感P350=电机定子电阻P354=电机转子电阻冷却/湿度P356=电机定子漏抗P358=电机转子漏抗P360=电机主电感P1120=上升时间P1121=下降时间P1082=电机最大速度以上参数设置完毕保持后,在线下载。
优化过程:点击commissioning调试:选择control panel ,点击控制权限,先进行电机参数静态测试,然后对速度环优化,最后动态测试。
全部优化结束后进行上载保持,再进行下载。
(5)端子参数设置:控制单元:X121:R722.0=P849 急停R723.0=P2081.2 状态字2R722.1=P2070.0 外部故障2R722.2=P860.0 合闸信号反馈P738.0=R863.1 合闸输出TM31:X520:R4022.2=P2106 :外部故障1R4023.2=P2181.4 :外部故障1R4030=R2139.3 状态字故障4,通信参数:1)控制字:R2050R2090.0=P840.0 ON/OFF1R2090.1=P844.0 ON/OFF2R2090.2=P848.0 ON/OFF3R2090.3=P852.0 操作使能R2090.6=P1142.0 速度给定使能R2090.7=P2103.0 故障确认R2090.10=P854.0 由PLC控制2)给定R2050.1=P1070.0 主设定值5. 故障处理:当出现过流故障时:报F6906故障代码,查电机是否接地,用摇表测主回路绝缘,查机械故障,查系统参数值是否适当。
西门子s120书本型变频器整流器逆变逆变器设手册备
西门子S120书本型变频器整流器逆变逆变器设手册备一、产品概述西门子S120书本型变频器是一款高性能的变频调速设备,广泛应用于工业自动化领域。
本手册主要介绍变频器的整流器、逆变器和相关设备的设置方法。
通过阅读本手册,用户可以全面了解S120变频器的功能特点,轻松完成设备的安装、调试及维护工作。
二、整流器设置1. 功能介绍高效率:转换效率高达98%;宽电压范围:适应不同电网电压;智能保护:具备过压、欠压、过流等保护功能。
2. 参数设置(1)电网电压设定:根据实际电网电压,调整参数P0080的值;(2)电网频率设定:根据实际电网频率,调整参数P0081的值;(3)整流器额定功率设定:根据整流器额定功率,调整参数P0082的值;(4)整流器过压保护设定:根据需求,调整参数P0083的值。
三、逆变器设置1. 功能介绍高性能:采用先进的矢量控制技术;精度高:输出电压精度高达1%;扩展性强:支持多种通信协议和现场总线。
2. 参数设置(1)电机额定功率设定:根据电机额定功率,调整参数P0300的值;(2)电机额定电压设定:根据电机额定电压,调整参数P0304的值;(3)电机额定电流设定:根据电机额定电流,调整参数P0305的值;(4)电机额定频率设定:根据电机额定频率,调整参数P0306的值。
四、设备调试与维护1. 设备调试在完成整流器和逆变器参数设置后,进行设备调试。
具体步骤如下:检查设备接线是否正确;确认电网电压、频率稳定;启动变频器,观察运行状态;调整参数,使设备运行在最佳状态。
2. 设备维护清理设备表面灰尘;检查接线端子是否紧固;检查散热风扇是否正常;检查整流器和逆变器模块是否有异常。
五、故障排除与安全操作1. 故障排除(1)故障现象:变频器无法启动。
排除方法:检查电源是否接通,确认变频器面板上的启动按钮是否正常,检查参数设置是否正确。
(2)故障现象:电机运行异常。
排除方法:检查电机接线是否正确,确认电机参数设置是否与实际相符,检查变频器输出是否正常。
西门子变频器S120调试指南

目录第一章电机优化 (3)1.S120驱动感应电机的优化 (3)1.1 正确配置电机 (3)1.2 优化过程: (3)2.S120 驱动第三方伺服电机时的优化 (4)a.电机数据计算P340 (5)b.电机数据静态辨识P1910 (5)c.速度环动态特性的优化 (5)d.电机数据动态辨识P1959 + P1960 (5)第二章 S120的基本定位 (6)前言 (6)一、激活基本定位功能 (6)二、基本定位_点动(JOG): (8)三、基本定位_回零(Homing / Reference): (9)四、基本定位_限位(Limit): (12)五、基本定位_程序步(Traversing Blocks) (13)六、手动数据输入(MDI) (14)第三章通讯 (17)一、使用PG/PC 的串口与S120通讯 (17)1.1 设置步骤: (17)1.2 S120地址的设定: (18)二、S120与TP170直接通讯 (18)2.1硬件准备与网络连接 (18)2.2 网络地址的设定: (19)2.3 ProTool 项目配置 (19)2.4 建立标签 (20)三、S120、TP170B与S7 200 (22)3.1 硬件准备及网络连接: (22)3.2 网络地址的设定 (22)3.3 建立变量 (24)四、通过DP总线实现S7-300与SINAMICS S120 通讯 (26)4.1 DP总线通讯功能简述 (26)4.2 DP通讯步骤 (26)4.2.1 DP 地址设定 (26)4.2.2 DP 报文设置 (27)五、通过Slave to Slave 方式实现各从站之间通讯 (38)5.1在 Step 7中项目组态 (39)5.2 从站参数配置 (39)5.3 激活Slave to Slave 功能 (41)5.4 在Step 7中使用SFC14,15读写7# 站数据 (41)第一章电机优化从V2.4版本起,Sinamics S120开放了对电机的优化功能,可优化的电机包括普通感应电机和同步伺服电机,无论是对Siemens 电机还是对第三方电机都可达到最优的控制特性。
西门子S120调试过程
1、设置通讯:
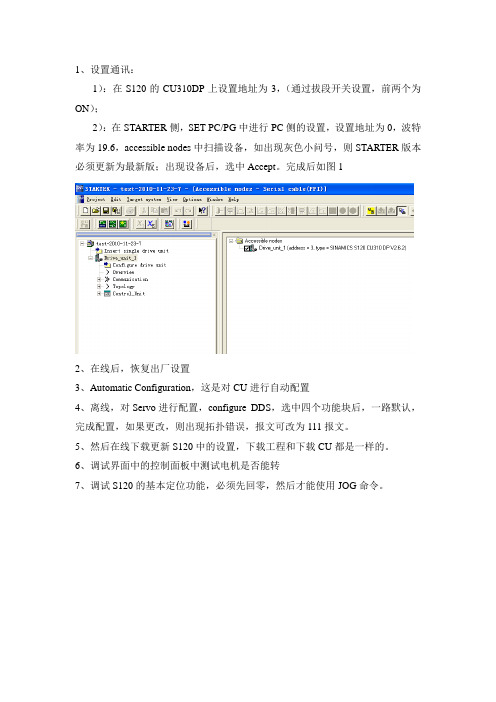
1):在S120的CU310DP上设置地址为3,(通过拔段开关设置,前两个为ON);
2):在STARTER侧,SET PC/PG中进行PC侧的设置,设置地址为0,波特率为19.6,accessible nodes中扫描设备,如出现灰色小问号,则STARTER版本必须更新为最新版;出现设备后,选中Accept。
完成后如图1
2、在线后,恢复出厂设置
3、Automatic Configuration,这是对CU进行自动配置
4、离线,对Servo进行配置,configure DDS,选中四个功能块后,一路默认,完成配置,如果更改,则出现拓扑错误,报文可改为111报文。
5、然后在线下载更新S120中的设置,下载工程和下载CU都是一样的。
6、调试界面中的控制面板中测试电机是否能转
7、调试S120的基本定位功能,必须先回零,然后才能使用JOG命令。
S120调试说明有截图
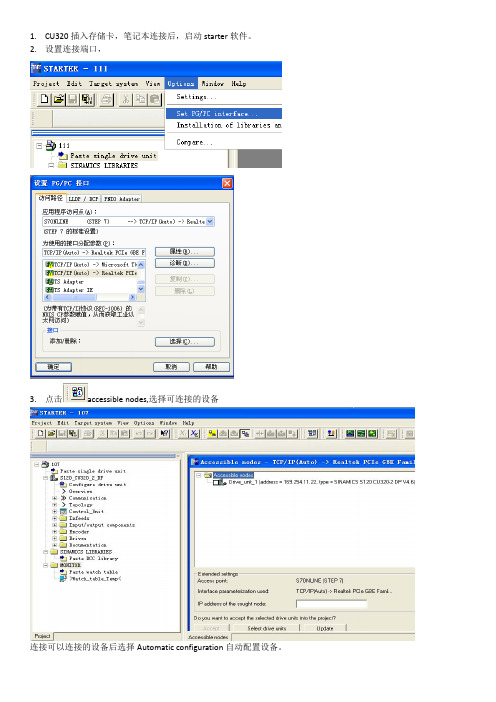
3. 点击 accessible nodes,选择可连接的设备
连接可以连接的设备后选择 Automatic configuration 自动配置设备。
Default setting for all components:选择 vector;并创建
Байду номын сангаас
4. DI: DI0 启动停止信号; DI1 手自动切换;DI2 故障复位。
5.DO:DO0 变频器运行信号;DO1 变频器故障信号;
整流单元:双击整流单元部分
在向导中进行快速调试
逆变电源
10
配置完成后,会上传给 PG
对 TM31 的配置:
1. AI:手操器 4~20mA 频率给定。
2.AO:1 通道为频率反馈信号。频率表量程为 60Hz,将 20mA 对应 120%。2 通道为电流反馈信号。将电流表量程设 置到 Vector 中 Expert list:P2002
S120设置

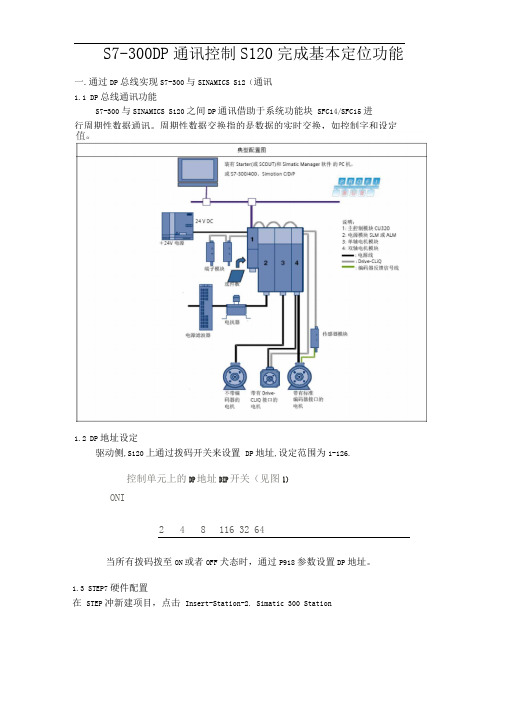
S7-300DP通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S120通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU310,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5此时会要求选择Message frame,点击选中Object1,然后点击Delete slot, 这时Message frame selection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置打开STEP7,此时会出现SINAMICS S120 CU310,点击Open Object打开S120项目。
打开S120项目后,选择在线Connect to target system若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ 口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置提示选择S120驱动类型,选择SERVO伺服方式。
S120变频器操作说明
S120变频器操作说明
1.基本功能:
-速度控制:S120变频器可以根据设定的转速控制交流电机的运行速度。
-转矩控制:S120变频器可根据设定的转矩值控制电机的输出转矩。
-多功能输入输出端口:S120变频器具有多个通用输入输出端口,可
用于连接外部设备。
-运行状态监测:S120变频器可通过内置的监测功能实时监测电机的
运行状态。
2.操作步骤:
步骤1:连接电源和电机
-将变频器的电源线与供电接口连接,并确保电源线的接线正确。
-将电机的输入端线与变频器的输出端口连接,并确保线缆接头牢固。
步骤2:设置参数
-打开S120变频器的控制面板,进入参数设置界面。
-根据实际应用需求,设置转速范围、启动方式、运行模式以及其他
相关参数。
步骤3:启动电机
-将变频器的开关打开,待变频器显示屏正常亮起后,按下启动按钮,电机开始运行。
-可通过面板上的转速控制按钮或者旋钮调节电机的转速。
步骤4:监测运行状态
-可通过变频器的显示屏实时监测电机的运行状态,包括转速、电流、转矩等参数。
-如发现异常情况,可通过变频器的报警功能进行故障排查。
3.注意事项:
-在使用S120变频器之前,请确保已经详细了解变频器的技术规格和
操作说明。
-在安装和连接电源时,务必断开电源,以免发生电击事故。
-对于较高功率的电机,请使用适当的散热装置,以防止过热现象发生。
-变频器应安装在通风良好、无腐蚀、无明火的环境中,避免水分、
尘土等物质进入变频器内部。
总结:。
S120故障输出和抱闸设置
选择电流 门限值, 推荐设为 20%
选择延时时间
- 39 -
• 抱闸控制位输出设定
选择 DI/DO11 作为抱 闸输出点
- 40 -
- 41 -
. - -
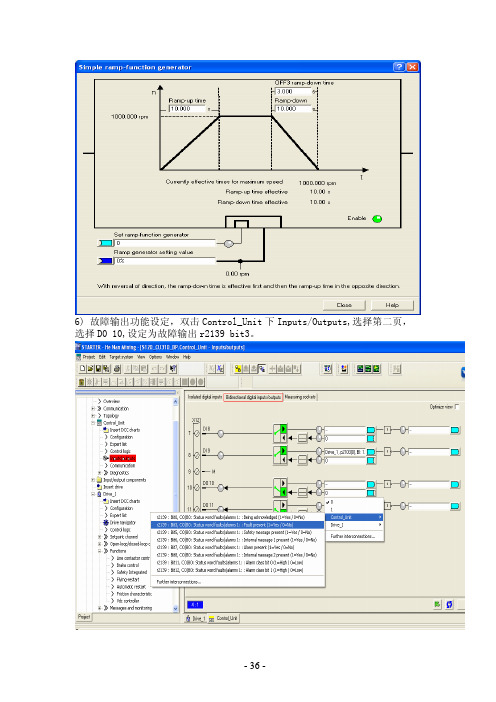
6) 故障输出功能设定,双击 Control_Unit 下 Inputs/Outputs,选择第二页, 选择 D0 10,设定为故障输出 r2139 bit3。
- 36 -
7) 抱闸控制功能设定,双击 Functions 下的 brake control,分别单击 Close brake 和 release brake.
7 ) 闭闸设定, 原则是当转速低于一定值的时候闭闸 • 单击 standstill detection
单击这里
选择实际转速 r63[0]
- 37 -
实际转速 关闸门限值
延时时间
• 选择故障信号接入闭闸信号
选择故障输 出信号
- 38 -
• 开闸设定,原则是当实际电流值高于一定值的时候开闸
选择实际电流 r68
S120速度设定及误差分析

word格式-可编辑-感谢下载支持S120速度设定及误差分析项目中通过上位机设定S120转速3000Rpm,但是实际转速只有2970Rpm,伺服系统为什么会有这么大误差(1%)呢?想要弄清这个问题必须先弄清楚以下概念。
1,机械输出轴每圈所代表的精度单位:如图中圆圈所标注,通常我们默认为1圈为10000LU,此LU为S120伺服电机所设置的基本单位,如机械旋转一圈为10mm,则每个单位LU表示的精度为10/10000=0.001mm。
2,机械轴减速比:对于ERW项目定位轴来说,一般减速比都比较大,本例中设定为1:720,本例中螺距(LEAD)设定为8mm(8000LU).此时我们通过上位机下发3000Rpm的转速,程序计算线速度为V=n*(GN/GDN)/LEAD=(3000×1/720)/8=33.333mm/Min。
通常情况下,我们通过S120参数P2643(EPOS direct setpoint input/MDI velocity setpoint/MDI v_set)接收速度设定值,但是需要注意的是P2643的单位为1000LU/min,所以33.333mm/Min=333330LU/min=33.33×1000LU/min,P2643为双整型,故33.33小数点后面都省略掉了,这样就降低了精度,约1%被省略掉了,所以实际输出的转速就少了1%。
那么如何避免这个问题呢? 可以将机械轴每一圈对应的精度调高:如可以设置为1圈为80000LU,这样误差只有0.1%,如果设置为800000LU,这样误差就只有0.01%,就可以得到理想的精度了。
实际上对于S120,很多参数都是以1000LU为单位,如jog speed(P2585,P2586)的设定,加减速设定(P2572,P2573)等,所以对于大减速比的机械来讲,需要合理的设置这个参数,以达到理想的精度。
S120常用调试参数_1-5

S120 常用控制参数1. 访问权限及出厂复位P003 BOP访问级别3:专家4:维修P010 驱动调试参数筛选0:就绪1:快速调试2:功率单元调试3:电机调试(电机模块)4:编码器调试(电机模块)5:工艺应用 / 单元15:数据组30:参数复位P970 驱动参数复位0:当前无效1:复位参数5:复位 Safety 参数(电机模块)100:复位 BICO参数2. 电机数据组P3. 编码器P4. 实际信号及控制字和状态字P015 宏文件选择r019 BOP控制字状态r020 转速设定值rpmr021 转速实际值rpmr022 转速实际值rpmr024 滤波的输出频率Hzr025 已滤波的输出电压Vr026 已滤波的直流母线电压Vr027 已滤波的电流实际值 Ar031 已滤波的转矩实际值Nmr035 端子上输入的温度℃(BLM)/电机温度(电机模块)r037 功率单元温度℃ /控制单元温度℃r046 缺少的使能信号r050 命令数据组有效位00:CDS 0有效位01:CDS 1有效r051 驱动数据组有效位00:DDS 0有效位01:DDS 1有效状态字 1 位00:接通就绪=r0899.0位01:运行就绪=r0899.1位02:运行使能=r0899.2位03:故障有效=r2139.3位04:OFF2有效=r0899.4位05:OFF3有效=r0899.5位06:接通禁止有效=r0899.6位07:警告有效=r2139.7位08:设定值/实际值偏差=r2197.7位09:PLC控制请求=r0899.9位10:达到或超过n 比较值=r2199.1位11:达到转矩极限=r1407.7 (取反 )位12:电机抱闸打开=r0899.12位13:电机超温报警=r2135.14( 取反 )位14:电机正向旋转=r2197.3位15:变频器过载警告=r2135.15( 取反 )控制字 1 位00:ON/OFF1 =r0898.0 =P840位01:OFF2 =r0898.1 = P844/ P845位02:OFF3 =r0898.2 = P848/ P849位03:使能运行=r0898.3 = P852位04:使能斜坡函数发生器=r0898.4 = P1140位05:继续斜坡函数发生器=r0898.5 = P1141位06:使能转速设定值=r0898.6 = P1142位07:故障复位=r0898.7 = P2103/P2104/P2105位08:JOG 0 =r0898.8 = P1055位09:JOG 1 =r0898.9 = P1056位10:通过PLC控制=r0898.10 = P854位11:设定值取反=r1198.11 = P1113位12:位13:MOP 上升=r1198.13 = P1035位14:MOP 下降=r1198.14 = P1036位15:P840 ON/OFF1 命令P844/ P845 OFF2P848/ P849 OFF3P852 使能P854 PLC控制P1140 使能斜坡函数发生器P1141 继续斜坡函数发生器P1142 使能转速设定值P1113 设定值取反(反向)P2103/P2104/P2105 故障复位r055 附加控制字r056 闭环控制状态字r060 未滤波的转速设定值rpmr061 未滤波的转速实际值rpmr068 直流母线的直流电流/ 电机实际电流绝对值r069 相电流实际值(电机模块)r070 直流母线电压5. 通讯P918 Profibus 通讯地址P922 Profibus 报文格式选择1:标准报文 1,PZD2-220:标准报文 20, PZD2-6350 :西门子报文350,PZD4-4352 :西门子报文352,PZD6-6353 :西门子报文353,PZD2-2,PKW4-4354 :西门子报文354,PZD6-6,PKW4-4999 :自由报文6. 其他设定源P1000 主给定设定来源0:无主设定值1:电动电位计2:模拟设定值3:转速固定设定值6:现场总线P1070 主给定r755:模拟设定值r1024:固定设定值r1050:电动电位计P1075 附加给定r755:模拟设定值r1024:固定设定值r1050:电动电位计:P1055 点动命令位0 (JOG1的信号源)P1056 点动命令位 1 (JOG2的信号源)P1058 JOG1 转速设定值P1059 JOG2 转速设定值P1035 电动电位计MOP正向升速命令源P1036 电动电位计MOP反向降速命令源P1037 电动电位计最大转速P1038 电动电位计最小转速P1039 电动电位计MOP取反P1040 电动电位计MOP初始值rpmP1080 最小速度rpmP1082 最大速度rpmP1083 正向速度极限rpmP1086 反向速度极限rpmP1085 正向速度极限信号源P1088 反向速度极限信号源P1110 禁止负方向P1111 禁止正方向P1113 设定值取反信号源P1120 RFG加速时间P1121 RFG减速时间P1135 OFF3 下降时间P1503 转矩设定值信号源P1520 转矩上限P1521 转矩下限P1522 转矩上限信号源P1523 转矩下限信号源P855 强制打开抱闸P856 强制闭合抱闸P810 命令数据组选择CDS位 0P811 命令数据组选择CDS位 1P820 驱动数据组选择CDS位 0P821 驱动数据组选择CDS位 1P700 命令源选择0:没有宏2:端子6:现场总线170: JOG1181: 2 线类型 2181: 2 线类型 3181: 3 线类型 1181: 3 线类型 2P2106/P2107/P2108 外部故障1/ 外部故障2/ 外部故障 3 P2112/P2116/P2117 外部报警1/ 外部报警2/ 外部报警 3P640电流极限P1300开环/闭环方式P1755无编码器运行时速度7. 数字及模拟量输入输出r720 CU 上数字输入输出数量r721 CU 上数字输入实际值r722 CU 上数字输入状态P730 数字输出DO 0的信号源选择P731 数字输出DO 1的信号源选择P732 数字输出DO 2的信号源选择r747 数字输出状态P748 数字输出取反r751 模拟输入状态P756 模拟输入类型选择0:单极电压输入( 0+10V)1:监控单极电压输入( +2V+10V)2:单级电流输入( 0mA+20 mA)3:监控单级电流输入( +4mA+20 mA)4:双击电压输入( -10V+10V)8:未连接传感器P771 模拟输出信号源P772 模拟输出当前输出值%P776 模拟输出类型0:电流输出( 0mA+20 mA)1:电压输处( 0+10V)2:电流输出( +4mA+20 mA)。
西门子S120变频器调试步骤
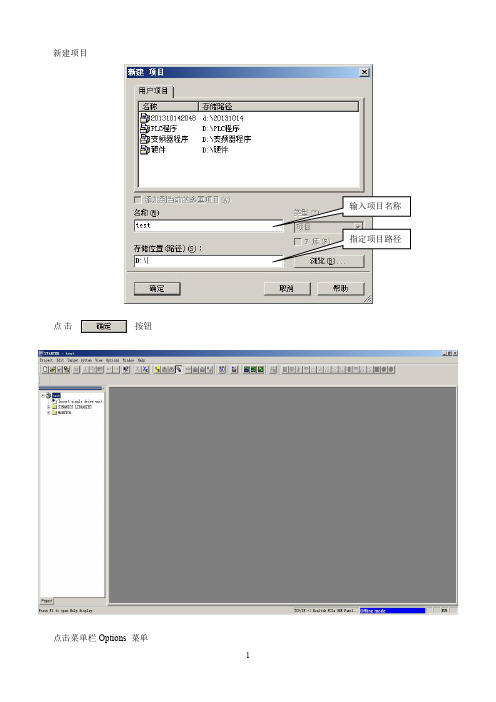
新建项目点击按钮点击菜单栏Options菜单输入项目名称指定项目路径点击设置PG/PC(使用USB编程电缆连接)点击按钮点击按钮,再次点击按钮,完成PG/PC 设置点击设置PG/PC(使用网线连接)点击按钮,完成PG/PC设置选择用于通讯的网卡点击这里点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮待软件左侧显示如上图,点击按钮,点击上图标记(在线)按钮点击这里点击按钮点击上图标记(恢复出厂设置)按钮点击按钮系统会执行Copy Ram to Rom操作点击这里完成后,出现如下界面双击这里双击上图标记(自动组态)按钮点击按钮点击按钮,完成后出现如下界面点击按钮以下进行参数设置:注意这里第一步:右击这里第二步:单击这里单击OK 按钮第一步:双击这里第二步:选择组0的扫描时间注意:如果没有整流模块时,变频器启动信号直接连接到电机模块的P840;并将r20047连接到p852。
有整流模块时,也将r20047连接到p852。
选择组0第一步:双击这里正向信号连接或门输入端0反向信号连接或门输入端1故障复位变频器启动注意:这两个参数一定在做完电机辨识以后再设定禁止反向运行禁止正向运行第一步:单击这里变频运行注意箭头方向变频故障抱闸输出注意:抱闸输出要在下面设置好抱闸条件以后,才能设置,否则找不到参数r1229.1注意:TB30的设置与TM31的设置类似,只是TB30集成在CU 上,并且TB30只能选择-10V~10V 信号,但是可以在Scaling 里更改其适用范围。
第一步:双击这里选择就绪第一步:双击这里第二步:设置速度给定输入类型第三步:设置模拟量死区第四步:点击这里并根据实际情况设定最后点击这里设置信号输出类型设置信号输出类型频率电流点击这里并根据实际情况设定点击这里并根据实际情况设定第一步:双击这里第二步:单击这里矢量控制最后点击这里带编码器直接点击这里直接点击这里应用在重载场合最后点击这里普通旋转电机最后点击这里输入正确的电机参数最后点击这里直接点击这里直接点击这里选择电机辨识然后点击这里选择抱闸方式选择选择外部抱闸然后点击这里点击这里进行编码器设置编码器设置完成后点击这里编码器脉冲无零位标记四线AB 相编码器最后点击这里八线ABZ 反编码器注意电压静态和动态辨识最后点击这里直接点击这里检查与实际是否相符设置加减速时间最后点击这里直接点击这里双击这里选择就绪编码器故障导致无编码器运行,继续运行,报警或门输出端给变频器使能快速励磁双击这里点击这里设置关抱闸条件点击这里设置开抱闸条件第一步:点击这里第二步:设置关抱闸转速第三步:点击这里第四步:点击这里设置电流百分比设置开抱闸条件(电流)最后点击这里双击这里再点击这里反转信号上文提到的禁止正反向信号参数设置完成后,开始电机的静态动态辨识静态辨识:单击按钮1,变频器启动,电机不会转动,等待变频器自动停止后单击按钮0;动态辨识:静态辨识结束后单击按钮1,电机转动,等待变频器自动停止。
S120变频器调试
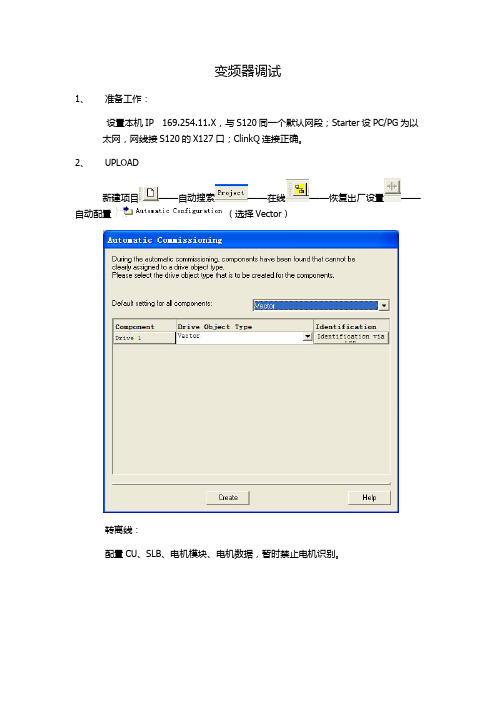
变频器调试1、准备工作:设置本机IP169.254.11.X,与S120同一个默认网段;Starter设PC/PG为以太网,网线接S120的X127口;ClinkQ连接正确。
2、UPLOAD新建项目——自动搜索——在线——恢复出厂设置——自动配置(选择Vector)转离线:配置CU、SLB、电机模块、电机数据,暂时禁止电机识别。
在线——下载并copy至rom(CF卡)3、*重要参数:P305电机额定电流P310电机额定转速*首次使用CF卡,这里需要重启4、快速调试:SLB:P10=1——P340=1——P3900=1(自动归零)电机模块:P10=1——P340=1——P3900=1(自动归零)5、面板试运行:Starter中电机模块中的控制面板(需接受授权,完毕后解除授权)6、电源模块识别:对于SLM和ALM,电源模块的P3410=5,表示激活了电路参数识别,同时在Alarm中也有A06400出现,表示电路识别已激活。
在第一次给出启动命令时,系统会自动识别电路参数,识别完成后,p3410自动成0,同时电源模块进入运行状态。
同理,电机模块识别前会提示A7991。
离线设置:CU模块参数列表P3=3(专家权限)——SLB P840=19.0(启动、停止)7、电机识别:离线设置:先完成第4步——CU模块参数列表P2102=19.7(故障复位)——SLB P840=19.0,电机模块P840=19.0在线设置:静态识别:P1910=1,3(影响P350、354、356、360)动态识别:P1960=1,3(无编码器),P1960=2,4(有编码器)P1910=1——启动——变为0——停止——P1910=3,P1960同理。
走行电机参数:le=20.6A,ne=1465rpm●参数离线修改—在线下载(A1073时需重启)至CF卡(ROM)生效,在线更改有时无效。
●电源模块识别有A06400出现,表示电路识别已激活,同理、电机模块识别前会提示A7991。
S120设置
S7-300DP 通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S12(通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.控制单元上的DP地址DIP开关(见图1)ONI2 4 8 116 32 64当所有拨码拨至ON或者OFF犬态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP冲新建项目,点击Insert-Station-2. Simatic 300 Station^fsiiU i IC Uonoger - JfnlUZII - C :VrQBr«n I ils b\S icmeiElS Lep Vs / p rv jXLEtlO J111:re&t5tati:n■+ OTKTIC PC 乳』曲 ! JDWK HM[ SUthXi b Otter Stater7 SThKJlC%% 3氏ft9SOTM1CCPA ^AICC 2m 5tdtbn打开硬件组态,新建 DP NETWORK 在CATALO 中选择相应S120产品,如 SINAMICS S120 CU310将其加入DP 总线,DP 地址设置应与驱动侧设置地址一 致。
耳IC IEM1:此anF 期rtnlW 对"-(]収)』0*1』|选择相应的S120Firmware 版本,如 V2.5.ij .■E'PI4*-_| 匸 TRF F ET 3005 亠 _| ET OTJ■ JET班 ■»」亠 _J IDEUT■ J E -_J Nr-*- =J Mrr^n* * ■J jr-'^ct 呼计匕E -_l 5iwn™亠 _l -.NubsM -nSIK'DPEO F 二I iIkDVzRT -_□ IlhUM K a+ JswT 1 J HEJfl... 0F M..1IJLdTTWitH CPtI MRQP时2-XT4&fc 雷LTC1T131 悴口TUN 002 5IK?TI(NI>q2 5M-W 引 ZMItSGl 茁5lh4UMK5OI»SINAHKSeiH 5lhJMIC5G115O5IMA M K5C 祁RP巴吋竺Q 列少p1 EirWdiCE^iSfl 5 EINLWR医的0S GIWUHERIP-hKt5 h > EirUMKECI»B1»r-id ih I -ni»1 陋呵匚5 51羽CIJ33O DP 54 叶曲天/:MOTION InW-acT.^j-ricB-l-ineAc^drJ Cs7irijnt^*m M QWI [ rftEr^hiUCtvk 白 P=>£LWltT:・^<rb:l r j :l:■■-■■ h"r 』申匕、5FROnDlfilU DP -o 畑uvwn 111--■ iGijur2 Nil'EIN ^|i•時 I pi | Jfi此时会要求选择Message frame,点击选中Objecti,然后点击Delete slot, 这时Message frame selection 为None 点击OK保存编译硬件组态,将其下载至 PLC 中。
S120 调试手册

S120简明调试手册目录一、确定机械输出轴旋转一圈的精度单位二、确定使用伺服的最大转速、加速度、减速度三、调整伺服电机的速度环四、调整伺服电机的位置环五、伺服驱动器与PLC的PROFIBUS通讯报文的匹配六、伺服电机的使能七、伺服电机的寻找参考点(Homing/Reference)八、伺服电机的点动(Jog)九、伺服电机的单步运行(MDI)十、伺服驱动器通过“控制面板”控制电机的试运行一、确定机械输出轴旋转一圈的精度单位调试步骤:A:伺服电机旋转一圈所产生的最大编码器数值(LU)。
B:电机输出端与机械连接轴的减速比。
通过设置减速比可以保证您不需要计算伺服电机和实际位移的比例关系,设置了减速比后可以使用机械实际的移动单位,控制伺服运行的参数。
例如:1:10,表示机械轴旋转1圈,伺服电机旋转10圈。
C:机械旋转一圈时设置的单位(LU),比如:您的机械旋转一圈移动10mm,机械单位设置10000。
每个单位所表示的精度=10mm÷10000=0.001mm。
此(LU)单位是西门子伺服驱动器参数基本设置单位。
D:伺服电机旋转一圈,编码器能够产生的脉冲数(LU)。
例如:脉冲×倍频=2048×2048=4194304。
二、确定使用伺服的最大转速、加速度、减速度。
调试步骤:A:伺服电机每分钟能够旋转的数值。
例如:10000×1000LU/min。
如果机械轴旋转1圈需要10000LU,则此参数表示:伺服每分钟旋转10000 000LU,即1000转/分钟。
B:伺服电机每S2最大加速度。
例如:5000 000LU/ S2,表示每秒可以移动5000 000LU 距离。
如果机械单位10000LU,表示每秒可以加速0.5圈。
C:伺服电机每S2最大减速度。
调试步骤:A:伺服电机速度环P值。
西门子伺服驱动器开放电机速度的PID调节给用户使用,此数值表示伺服电机在速度环控制时的加速增益刚性。
s120 参数手册 2010

s120 参数手册 2010
(原创版)
目录
1.S120 参数手册概述
2.S120 参数手册的主要内容
3.S120 参数手册的更新历史
4.S120 参数手册的重要性
正文
1.S120 参数手册概述
S120 参数手册是一本详细描述 S120 设备参数的技术文档,它为使用 S120 设备的用户和工程师提供了全面的参考资料。
该手册包含了
S120 设备的各种参数及其使用方法,对于确保设备正常运行和维护设备具有重要的指导意义。
2.S120 参数手册的主要内容
S120 参数手册主要包括以下几个方面的内容:
(1)设备概述:介绍了 S120 设备的基本信息,包括设备类型、主要功能、适用场景等。
(2)参数分类:对手册中的参数进行了分类,包括基本参数、高级参数、安全参数等,方便用户快速查找和使用。
(3)参数说明:详细描述了每个参数的含义、取值范围、默认值等,并对参数的使用方法进行了讲解。
(4)参数设置示例:通过实例演示了如何设置参数,帮助用户更好地理解和使用参数。
3.S120 参数手册的更新历史
S120 参数手册会随着设备的升级和更新而进行相应的修订。
根据文本,我们可以知道,这本手册的最新版本是 2010 年发布的。
在此之前,可能还有其他版本的手册,为用户提供了不同时期设备的参数信息。
4.S120 参数手册的重要性
S120 参数手册对于设备的使用和维护具有重要的参考价值。
通过阅读手册,用户可以了解设备的各项参数,正确地设置和使用参数,从而确保设备的正常运行。
此外,手册还可以帮助工程师快速定位设备故障,提高维修效率。
S120变频器调试步骤及故障处理

S120变频器调试步骤及故障处理1.调试设备:连铸公用及铸流部分电机的控制变频器(S120变频器)79台。
其中:铸流部分:塞棒1和塞棒2(2台),5个拉矫直机(5台),1个中间辊道(5个),1个串前辊,1个串后辊,1个输出辊道(7台),2.调试进行前首先将电机接手拆除,电机轴用手可以盘动,说明旋转没有阻力, 调试才可以进行。
3.将电机及控制参数设置:(1)检查设备清灰(2)上电控制电源,先将源参数上载保存。
(3)恢复工厂设置:在线点击恢复工厂设置即可。
(4)优化参数过程:首先离线将电机参数赋值:P304=电机额定电压P305=电机额定电流P307=电机功率P308=电机功率因数P310=电机额定频率P335=电机冷却类型P320=电机励磁电流P322=电机最大速度P352=电缆电阻P353=电机串联电感P350=电机定子电阻P354=电机转子电阻冷却/湿度P356=电机定子漏抗P358=电机转子漏抗P360=电机主电感P1120=上升时间P1121=下降时间P1082=电机最大速度以上参数设置完毕保持后,在线下载。
优化过程:点击commissioning调试:选择control panel ,点击控制权限,先进行电机参数静态测试,然后对速度环优化,最后动态测试。
全部优化结束后进行上载保持,再进行下载。
(5)端子参数设置:控制单元:X121:R722.0=P849 急停R723.0=P2081.2 状态字2R722.1=P2070.0 外部故障2R722.2=P860.0 合闸信号反馈P738.0=R863.1 合闸输出TM31:X520:R4022.2=P2106 :外部故障1R4023.2=P2181.4 :外部故障1R4030=R2139.3 状态字故障4,通信参数:1)控制字:R2050R2090.0=P840.0 ON/OFF1R2090.1=P844.0 ON/OFF2R2090.2=P848.0 ON/OFF3R2090.3=P852.0 操作使能R2090.6=P1142.0 速度给定使能R2090.7=P2103.0 故障确认R2090.10=P854.0 由PLC控制2)给定R2050.1=P1070.0 主设定值5. 故障处理:当出现过流故障时:报F6906故障代码,查电机是否接地,用摇表测主回路绝缘,查机械故障,查系统参数值是否适当。
S120调试总结
S120调试总结在进行S120调试的过程中,我遇到了一些问题,也学到了不少经验和教训。
下面是我的调试总结。
首先,在进行S120调试之前,我们需要对S120控制器进行一些基本的配置。
比如,确定好控制器的输入输出端口,设定好通信接口,选择好适合的软件工具等。
这些都是保证调试顺利进行的基础。
在调试过程中,我发现了一些常见的问题。
例如,通信故障是一个常见的问题。
这通常是由于通信线路、传感器或控制器硬件等问题引起的。
为了解决这个问题,我们可以检查通信线路是否接触良好,传感器是否损坏,控制器硬件是否工作正常等。
此外,也可以通过使用适当的软件工具,如调试助手,来检查通信数据的传输情况。
另一个常见的问题是参数设置错误。
在调试过程中,我们需要设置一些参数,如PID参数、速度曲线等。
如果这些参数设置错误,就会导致控制效果不佳。
所以,在进行参数设置之前,我们需要对S120控制器的工作原理和各种参数的含义有一定的了解。
并且,还需要根据实际情况来调整参数,以达到最佳的控制效果。
此外,还需要注意系统的稳定性。
在调试的过程中,有时候会出现系统不稳定的情况,例如电机抖动、速度波动等。
为了解决这个问题,我们可以通过调整控制器的参数,如控制增益、PID参数等,来提高系统的稳定性。
另外,还可以使用滤波器来消除传感器信号中的噪声,从而提高系统的稳定性。
在进行S120调试时,还需要注意安全性。
由于S120控制器通常需要与大功率设备,如电机、传感器等连接在一起,所以在调试过程中,我们需要注意避免电流和电压过高,避免短路和过载等情况的发生。
为了保证调试的安全性,我们可以在调试过程中使用安全装置,如保险丝等。
此外,还需要遵循相应的安全操作规程,如正确地连接电气设备,正确地使用工具等。
最后,调试结束后,我们还需要对整个调试过程进行总结和反思。
我们可以回顾整个调试过程,分析其中的问题和不足,并提出一些改进的建议。
这样,将有助于我们在以后的调试过程中避免类似的错误和问题的发生。
S120负载平衡设置方法
S120负载平衡设置方法(测试OK)
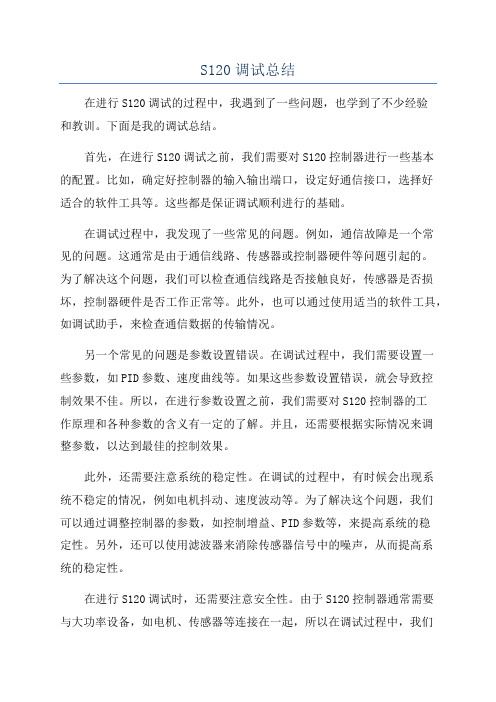
当两台电机需要做负载平衡时,可以采用主从控制方式实现,主机采用速度控制,从机采用速度控制转矩限制,从机设定如下:
一、转矩限制设定
这里假设主机正转,从机反转的模式,程序里面依旧根据计算速度给主从驱动各自的速度,上图中各个位置描述:
1:P1522,这里设置成0%,即与主机同方向之转矩不输出(因为从机是反转),如果从机是正转这里就是主机的实际转矩设定点r79. 2:P1551,设置成1,也可以根据需要通过程序控制。
3:P1523,设置成主机的转矩设定点r79,需要与主机同向时且正转时设置为0.
4:P1525,设置成-100%,即取主机转矩的相反数,因为需要反转,如果设成100%的话不会运转。
具体设置可以根据实际使用灵活组合,只要做到就是同向同转矩,反向反转矩即可。
二、速度命令设定
需要将从机的速度高于主机才会起到作用,如果慢于主机,那么从机无法帮助输出负载拖动,反而成为主机的拖累。
图中设定通过实验,设定2处参数会有比较好的效果。
1:P1071,命令速度百分比,可以放大缩小来自于速度通道的命令数据,实际效果不是很好,慢速时不明显,高速时太快。
2:P1075:速度叠加。
设置成P2900或P2901,然后再把P2900设置成需要叠加的百分比,这个百分比是P2000的百分比,这个参数好处是数值固定。
三、故障屏蔽
因为设置了一个速度叠加,正常情况下从机有了负载后会跳F7900和F7902与堵转和速度误差过大之类的报警,统统放到P2118里面屏蔽之即可。
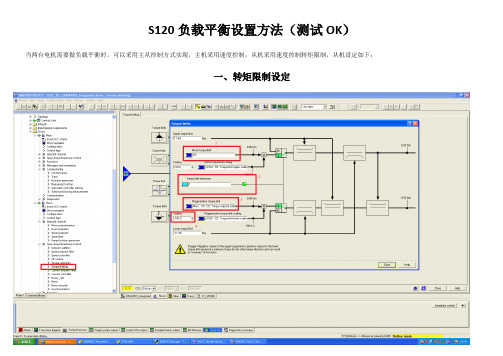
S120变频器调试
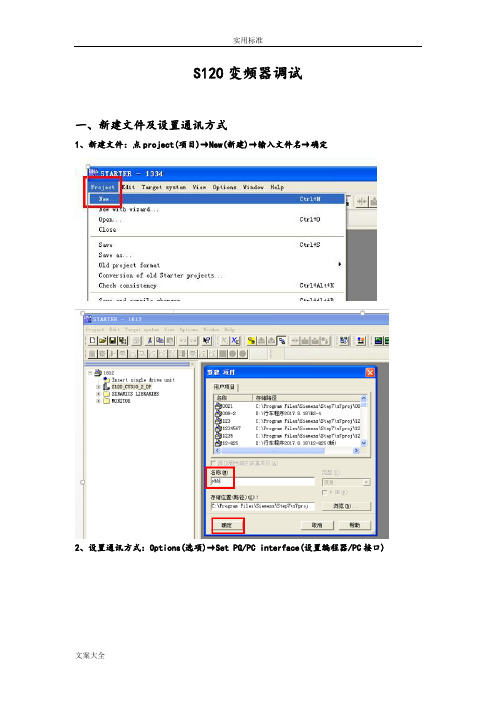
S120变频器调试一、新建文件及设置通讯方式1、新建文件:点project(项目)→New(新建)→输入文件名→确定2、设置通讯方式:Options(选项)→Set PG/PC interface(设置编程器/PC接口)3、选择接口参数:TCP/IP Intel(R) 82579LM→点属性4、点网络属性5、双击本地连接→点属性6、选择TCP/IP协议→点属性7、输入IP地址,子网掩码→点确定二、不带编码器手动组态1、方式一:双击Insert single drive unit(插入驱动装置)→选控制单元型号→CF卡版本号4.5→通讯方式IP→OKnodes→点Accept(接受)→Close3、双击Configure drive unit(配置驱动单元)→选择驱动类型Vector(矢量)→Next→Next4、选择功率单元型号→Next→Next→Nextmotor(rotating)感应电机(旋转)→Next6、输入电机参数→Next→Next→Next→Next7、电机识别选:〔0〕Inhibited(不识别)→Next8、报文选择:端子控制为默认设置(999)Free telegram configuration with BICO(通过BICO进行自由报文配置),通讯控制选(1)Standard telegram 1,PZD-2/2(标准报文1,PZD-2/2)→Next→Next9、点Finish(完成)10、选中S120_CU310_2_DP→点在线→钩上S120_CU310_2_DP→OK11、下载程序:点Download(下载)→YES→Close三、带编码器自动项目组态1、自动读取驱动装置:点击Accessible nodes(可访问节点) →钩选Accessible nodes→点Accept(接受)→Close2、点击Drive_unit_1→点在线→Connect to assigned devices(连接到指定的设备)→Close3、点Restore factory settings(恢复出厂设置)→YES4、双击Automatic Configuration(自动配置)→点击Start(自动组态)5、选择Vector矢量→→Close6、点GO OFFLINE(离线)7、点Configuration(配置)→点Configure DDS(配置DDS)→修改配置参数8、选择(21)Speed control带编码器矢量控制→Next→Next→Next→Next→Next8、输入电机参数→去掉电机辅助数据与等效数据2个钩→Next→Next9、修改编码器参数:选1024 HTL A/B 3005→Next10、电机识别选:〔0〕Inhibited(不识别)→Next→Next→Next→Finish(完成)7、点保存→点击Drive_unit_1→点在线→点下载→点YES1、STARTER面板控制:双击Control panel(控制面板)2、点Assume Control Priority(获取控制权)→点Accept(接受)3、钩选Enables(激活使能信号)→输入转速n=1500→点绿色Drive On(启动按钮) →转速0%—200%可调→点红色Drive OFF(停止按钮)→点黄色Give up control ptiority(取消控制权)→YES4、静态辩识和动态辩识:Commissioning(调试)→Stationary/turning measurement(静态/动态辩识) →Meas type里面选择如下Stationary measurement (静态辩识) 不带负载Turning measurement during encoder less operation(不带编码器动态辩识) 不带负载Turning measurement with encoder(带编码器动态辩识) 不带负载Speed controller optremrezatreon for sensor lell operation(不带编码器速度环优化) 带负载Speed controller optremrezatreon with sensor(带编码器速度环优化) 带负载→Activate measurement(激活辩识)→Close5、Control panel(控制面板) →点Assume Control Priority(获取控制权)→点Accept(接受) →钩选Enables(激活使能信号)→点绿色Drive On(启动按钮)→Status:Nomeasurement静态辩识完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S7-300DP通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S120通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU310,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5此时会要求选择Message frame,点击选中Object1,然后点击Delete slot, 这时Message frame selection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置打开STEP7,此时会出现SINAMICS S120 CU310,点击Open Object打开S120项目。
打开S120项目后,选择在线Connect to target system若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ 口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置提示选择S120驱动类型,选择SERVO伺服方式。
配置完毕出现下图画面,点击close此时需要离线配置,点击Disconnect from target system 配置驱动SERVO_02,点击Confiure DDS出现S120驱动配置画面,将前三项都打勾,激活基本定位功能。
配置MotorModule,由于之前已有Drive-CLIQ将配置读上来,直接Continue出现提示,将P0864 Infeed in operation设为1配置电机,直接由Connection X1通过DriveCLIQ读出电机信息选择电机是否有抱闸刹车选择编码器类型已有DriveCLIQ读出在Mechanics画面中设置传动比,Load revolutions 和Motor revolutions设置S120电机一圈所对应的长度单位LU。
LU per load revolutions(position setpoint/actual)画面中将值设为了10000,即电机一圈代表走了10000个LU注:LU per load revolutions(position setpoint/actual)设置的值与编码器精度有关,不能大于LU per load revolutions(Encoder revolutions)的值Active modulo correction激活模态,对于电机设定的长度和实际长度从360000LU开始回到0,循环执行。
即0-360000再回到0.选择通讯报文,对于基本定位的报文选择SIEMENS telegram110,PZD-12/7完成配置。
点击SINAMICS_S120_CU310下Configuration可以看到会有红色惊叹号,且地址为问号,点击Transfer to HW Config 将配置传送到硬件组态中。
点击ACTIVE按钮并将其激活。
保存编译。
再返回到SINAMICS_S120_CU310下Configuration画面,可以看到红色惊叹号变为蓝色的勾,地址也已经分配为256开始的地址。
保存编译整个项目。
连线。
下载整个项目。
1.5 S7-300中通讯编程利用SFC14和SFC15读写S120,达到通讯控制S120的目的。
SFC14读,占用7个PZD在LADDR填写S120硬件地址,256对应16进制即W#16#100RECORD中填写设定DB地址 P#DB2.DBX0.0 BYTE 14,即从DB2.DBX0.0开始的14个BYTE的地址分配为从S120里读出的PZD值RET_VAL 返回值显示故障信息SFC15写,占用12个PZD在LADDR填写S120硬件地址,256对应16进制即W#16#100RECORD中填写设定DB地址 P#DB1.DBX0.0 BYTE 20,即从DB1.DBX0.0开始的20个BYTE的地址分配为向S120里写的PZD值RET_VAL 返回值显示故障信息定义相对应的DB块 DB1 DB21.6 基本定位1.6.1 JOG点动S120中基本定位功能的点动有两种方式速度方式:点动按钮按下,轴以设定的速度运行直至按钮释放位置方式:点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止在通过通讯控制S120之前需注意,需将PLC与S120的通讯控制位置1即将P854 Master ctrl by PLC 参数对应r2090 bit 10,即DB1.DBX0.2执行点动功能,需先使能S120 ON/OFF1(P840)打开Drives下Servo_02下Control logic可以看到相关控制字及状态字可以看到,由于之前选择了报文结构110,已经自动将控制字配置好。
P840 ON/OFF1相对应的是r2090 bit0,即PZD1的bit0我们已经定义好通过通讯写S120PZD的地址,PZD1 Bit0对应的DB地址即DB1.DBX1.0。
还有P844 bit1 OFF2信号即r2090 bit1 对应DB1.DBX1.1P845 bit1 OFF3信号即r2090 bit2 对应DB1.DBX1.2P852 Enable operation 即r2090 bit3 对应DB1.DBX1.3将这些信号都置1.S120使能。
点击Servo_02-Technology-Basic Psitioner-JOG,进入JOG画面设置点动命令源Jog1 signals source 即r2090 bit 8 DB1.DBX0.0Jog2 signals source 即r2090 bit 9 DB1.DBX0.1点动方式选择 0速度 1位置Jogging incremental 即r2092 bit5 DB1.DBX5.4在Analog Signal画面中Velocity override 即r2050[4] PZD5 DB1.DBW8此为点动速度的倍率,通过修改其值来改变点动的速度,16进制4000H,10进制16384对应100%在Configure jog setpoints画面中设置JOG1和JOG2的速度和位置1.6.2 回零/寻参点击Servo_02-Technology-Basic Psitioner-Homing,进入Homing画面Homing又分active homing主动回零和passive homing(on the fly)被动回零.Active homing如下图可以看到,主动回零分为三种形式Homing output cam and encoder zero mark使用接近开关加编码器零位Encoder zero mark 仅编码器零位External zero mark 仅外部零标志最常用的就是接近开关加编码器零位的方式在homing/configurationReferencing start r2090 bit11即DB1.DBX0.3 为寻零开始信号Search for reference,reference cam r2092 bit2 即DB1.DBX5.2即外部接近开关动作过程1,将S120使能,P840 DB1.DBX1.0置12,寻零开始信号置reference startDB1.DBX0.3置1 ,电机开始运行3,将外部接近开关信号对应reference cam ,当DB1.DBX5.2为1时,电机减速,搜寻编码器零脉冲,遇到后停止。
寻零结束当编码器为绝对值编码器时,会看到以下画面在Home position coordinate中设置坐标值,点击Perform absolute value calibration做编码器校准即可1.7 基本定位_程序步(Traversing Blocks)通过使用Traversing Blocks“程序步”模式可自动执行一个完整的定位程序,也可实现单步控制;但只有当前程序步执行完后下一个程序步才有效。
在S120中提供了最多64个程序步供使用。
1.7.1 程序步设置点击Servo_02-Technology-Basic Positioner-Traversing Blocks,进入画面进入程序块设置画面,对于程序步有特定的数据结构,如下图P2616 (No.) 每个程序步都要有一个任务号,运行时依此任务号顺序执行(-1表示无效的任务)P2621 (Job) 表示该程序步的任务。
可选择:Positioning(位置方式)、Endless_Pos/Endless_Neg(正、反向速度方式)、Waiting(等待指定的时间)Goto(跳转到指定的程序步)Set_0/Reset_0(置位/复位指定的开关量输出点)P2622(Parameter)依赖于不同的Job,对应不同的Job有不同的意思P2023.8/9(Mode)定义定位方式,仅当任务(Job)为位置方式(Position)时有效P2617/P2618/P2619/P2620(Position,Velocity,Acceleration,Deceleration)指定运动的位置,速度,加减速P2623.4/5/6 (Advance)制定本任务结束方式。
END:本任务结束不连续执行下一任务,Continue_With_Stop:本任务结束准确定位,电机停止后重新启动开始下一任务。
Continue_Flying:本任务结束连续执行下一任务。
1.7.2 程序步示例如上图第1步,以速度600,加减速100%,走绝对定位位置1000,本任务结束连续执行下一任务第2步,以速度600,加减速100%,走相对定位-500,本任务结束准确定位后开始下一任务第3步,Goto 1,回到第1步,循环执行。