基于HSV非均匀量化的CAMshift目标跟踪算法
基于CAMshift算法的目标跟踪研究

基于CAMshift算法的目标跟踪研究目标跟踪是计算机视觉中的一个重要问题。
随着计算机技术的发展,目标跟踪技术得到了广泛的研究和应用。
其中,CAMshift 算法是一种经典的目标跟踪算法之一。
本文将介绍CAMshift算法的基本原理、优缺点以及应用。
一、CAMshift算法的基本原理CAMshift算法是一种基于颜色直方图的目标跟踪算法。
该算法擅长于跟踪颜色信息相对稳定的目标,如人脸、车辆等。
具体来说,CAMshift算法首先利用颜色直方图来描述目标的颜色信息。
然后,通过对直方图进行归一化,得到标准化的颜色直方图。
接下来,通过反向投影,计算图像中每个像素与目标颜色直方图之间的相似度。
将相似度最高的像素作为目标的中心点,并利用Meanshift算法进行目标的迭代更新。
最终,通过利用CAMshift算法实现目标的自适应缩放和旋转。
总结来说,CAMshift算法的基本原理可以归纳为:颜色直方图描述目标颜色信息,反向投影获取像素与目标颜色直方图的相似度,Meanshift算法进行迭代更新,CAMshift算法实现目标自适应缩放和旋转。
二、CAMshift算法的优缺点CAMshift算法具有如下的优点:1. 强鲁棒性。
CAMshift算法采用的颜色直方图具有很强的鲁棒性,能够适应环境光线变化、物体表面材质变化等情况。
2. 高速度。
CAMshift算法能够在实时性要求比较高的场合下实现目标跟踪,速度较快。
3. 自适应性。
CAMshift算法能够通过自适应缩放和旋转来适应目标尺度和方向的变化,能够有效地跟踪运动目标。
但是,CAMshift算法也存在一些缺点:1. 对光照和噪声比较敏感。
在光照和噪声较大的情况下,由于颜色直方图会受到影响,导致跟踪效果下降。
2. 不适用于多目标跟踪。
由于CAMshift算法只能根据单个颜色直方图进行目标跟踪,因此不适用于多目标的跟踪。
三、CAMshift算法的应用CAMshift算法已经在许多领域得到了广泛的应用。
CamShift_目标跟踪算法毕业设计
CamShift_目标跟踪算法毕业设计武汉理工大学本科生毕业设计(论文)局部CamShift跟踪算法学院(系):理学院专业班级:信计0703学生姓名:刘毅指导教师:楚杨杰学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在年解密后适用本授权书2、不保密囗。
(请在以上相应方框内打“√”)作者签名:年月日导师签名:年月日毕业设计(论文)任务书学生姓名:刘毅专业班级:信息与计算科学0703班指导教师:楚杨杰工作单位:武汉理工大学理学院设计(论文)题目:跟踪算法的研究设计(论文)主要内容:该论文在国内外现有的跟踪算法研究基础之上,深入讨论目前的主流跟踪算法Mean-Shift跟踪算法,并且讨论Mean-shift的本质原理以及应用到目标跟踪的应用方法,并同时讨论了Mean-shift算法的改进算法Camshift。
在编程分析算法的跟踪优缺点以后,提出自己创建的算法:局部Camshift算法,最后,应用大量实践视频来做跟踪,分析跟踪效果。
要求完成的主要任务:1、查阅不少于15篇的相关资料,其中英文文献不少于5篇,完成开题报告;2、深入理解Mean-shift算法原理机制,了解Mean-shift的算法本质;3、理解Mean-shift算法用作跟踪的原理,并且掌握Camshift跟踪算法最后再加以改进;4、完成不少于20000英文(5000汉字)的英文文献翻译;5、完成不少于12000字的毕业设计论文.必读参考资料:[1] K.Fukunaga and L.D.Hostetler,"The Estimation of the Gradient of a DensityFunction,with Applications in Pattern Recognition" IEEE rmationTheory,vol.21,pp.32-40,1975.[2]D. Comaniciu and P. Meer, “Mean Shift: A Robust Approach Toward Feature SpaceAnalysis,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 24, no. 5, pp.603-619, May 2002.[3]aniciu, V. Ramesh, and P.Meer "Real-Time Tracking of Non-Rigid Objects UsingMean Shift" Proc Eighth Int'lConf. Computer Vision, vol,21,pp.331-337,1996[4] G.R.Bradski,"Computer Vision Face Tracking as aComponent of a Perceptual User Interface,"Proc.IEEE Workshop Applications of Computer Vision,pp.214-219,Oct.1998指导教师签名:系主任签名:院长签名(章)武汉理工大学本科学生毕业设计(论文)开题报告注:1.开题报告应根据教师下发的毕业设计(论文)任务书,在教师的指导下由学生独立撰写,在毕业设计开始后三周内完成。
利用CamShift算法实现运动目标自动跟踪

Using Camshift Algorithm to Track Moving Objects Automatically
Qu Jubao1,Wang Shujuan2,Lin Hongji3
(1. Department of Mathematics & Computer,Wuyi University,Wuyishan Fujian 354300,China; 2. Continuing Education Institute,Wuyi University,Wuyishan Fujian 354300,China;
的程度;
d2b 值的大小表示目标模型与背景模型的区分程度。
最优目标模型应使
d
2 a
尽量小,同时使
d
2 b
尽量大。
这是一个多目标规划(LVP)问题,用线性加权法将
其转化为单目标规划问题。令 、 为选定的权系数,
其值表示 2 个目标函数的信任程度,并满足 + =1,
> 0, > 0,目标函数为:
d2=
d a2-
型,使得组合模型和目标模式有较高的相似性,且与
背景模式有较大的差异性,令最优组合系数为x*i,i =1, 2,3。对目标区域及目标周围背景区域的颜色分布进行
概率统计,分别用 pa , pb 表示,它们与凸组合模型 qz 间 的欧氏距离平方表示为:
,
,
(6)
式中:d
2 a
值的大小表示目标模型与最优组合模型接近
a)原始图像
b)背景差分图像
c) 经典三帧差分图像
d)改进三帧差分图像
图 1 不同方法获取目标的结果图
Fig . 1 Results of different methods for the target
利用Camshift算法实现运动目标自动跟踪

Absr c t a t: Tor ai eta k n a g t uo aial n tee vr n n so o e l r c i g tr esa tm tc l i n io me t fc mplxb c g o n , o o o f so n z y h e a k r u d c l rc n u i na d tr e e o m a i , h h r c e itc fCa s itag rt m e stv o te h ec m p n n r x e d d t au ai n a g td f r t on t ec a a trsi so m h f lo ih s n i e t h u o i o e t e e t n e o s t r to , a
曲 巨宝 。 淑 娟 ,王 ,林 宏基 。
(. 1武夷学院 数学与计算机系 ,福建 武夷 山 3 4 0 ;2 武夷学院 继续教育学院 ,福建 武夷山 34 0 ; 5 30 . 5 3 0
3 福州 大 学 数 学 与计 算 机 科 学学 院 ,福 建 福 州 3 0 0 . 50 2)
tmea a t eta k n yse s a dt erc g i o p e n a k n a a ii fs se saei p o e i d pi c i g s tm , n h e o nt ns e da d t c gc p b l y o y tm v r i r i t r m r v d. Ke wo d y r s:Ca s it m h f;Kam a ;ta kn ;a t m aial ;HS l n rc i g u o t ly c V
基于Camshift的运动目标检测跟踪算法

基于Camshift的运动目标检测跟踪算法作者:邢定宇侯宝临秦明伟来源:《电脑知识与技术》2018年第01期摘要:对传统的运动目标跟踪算法而言,目标检测时由于环境因素的影响,难以准确检测到目标区域。
因此常采用手动选取运动目标的方法,但此方法由于智能化程度不高,且具有较强的主观性和经验性,所得数据缺乏足够的说服力。
针对于此,提出在多帧差分法的基础上,采用连通区域搜索筛选出合适的运动目标并标定目标区域,确定运动目标后进行跟踪;在目标跟踪阶段,实时更新标定区域内的融合特征向量,以提高后续跟踪算法的准确性和鲁棒性。
实验表明:该方法切实可行,在目标检测阶段,改进后的算法在增加少量计算量的前提下,筛选并标定出目标区域;在目标跟踪阶段,将计算区域缩小在标定跟踪范围内,提高了算法效率,且保证算法了的稳定性和鲁棒性。
关键词:目标检测;多帧差分;连通域检测;目标跟踪中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2018)01-0209-03Abstract: For traditional moving target tracking algorithm, it is difficult to detect the target region accurately because of the influence of environmental. Therefore, the method of manually selecting tracking targets is often adopted. But the method is not sufficiently intelligent and has strong subjectivity and experience. So the data is not sufficiently convincing. To solve this problem, Based on the multi frame difference method, the connected region search is used to select and calibrate the appropriate moving region. In the target tracking phase, the fusion feature vector in the calibration area is updated in real time to improve the accuracy and robustness of the follow-up tracking algorithm. Experimental results show that the method is feasible. In the target detection phase, the improved algorithm can select and calibrate the target area under the premise of adding a small amount of computation. In the target tracking phase, the computation area is reduced in the calibration tracking range, which improves the efficiency of the algorithm and ensures the stability and robustness of the algorithm.Key words: Target detection; Multi frame difference; Connected domain detection; Target tracking1 概述基于图像序列的运动目标检测跟踪是图像处理和计算机视觉领域的重要分支之一。
一种改进的CamShift运动目标跟踪算法

一种改进的CamShift运动目标跟踪算法薛桐;任世卿【摘要】CamShift算法具有复杂度低,实时性和鲁棒性好等优点,被广泛地应用于目标跟踪领域.但是CamShift算法在运动目标接近与其颜色相近的固定遮挡物时,跟踪会出现明显的偏移.针对这一问题,提出了一种解决与运动目标颜色相近的固定遮挡物对目标跟踪的干扰的方法.首先,运用单高斯背景模型对运动目标进行背景建模;其次,通过背景模型与当前帧的运算,确定与运动目标颜色相近的固定遮挡物所在的位置;最后,利用H分量灰度图计算运动目标所在位置.实验结果显示,该方法在运动目标接近相似颜色固定遮挡物时,能很好地跟踪运动目标.【期刊名称】《沈阳理工大学学报》【年(卷),期】2015(034)002【总页数】7页(P28-34)【关键词】目标跟踪;CamShift算法;单高斯背景模型;HSV颜色空间模型【作者】薛桐;任世卿【作者单位】沈阳理工大学信息科学与工程学院,辽宁沈阳110159;沈阳理工大学信息科学与工程学院,辽宁沈阳110159【正文语种】中文【中图分类】TN911计算机视觉中的一个重要研究方向是视频监控,它不但有广阔的应用前景,而且在理论研究上也有很高的价值[1]。
其中视频监控涉及的运动目标跟踪一直是一项非常活跃的研究领域,它是计算机视觉技术的核心,同时结合了模式识别、自动控制、图像处理、人工智能等高技术课题。
常用的运动目标跟踪算法有Kalman滤波、MeanShift算法、CamShift算法等[2]。
范五东等提出了一种基于HSV色彩空间特征与Kalman滤波融合的目标跟踪算法,克服了运动目标表面特征变化带来的目标跟丢现象[3]。
赵文倩等将背景差分法与CamShift算法结合,在一定程度上满足了实时性与稳定性的要求[4]。
本文针对运动目标在运动过程中接近与其颜色相近的固定遮挡物时跟踪出现偏移这一问题,基于CamShift算法原理,运用单高斯背景模型建立背景[5],经过运算得到相近颜色的遮挡物的位置,进而更准确地计算出运动目标的位置。
基于CamShift的目标跟踪算法

基于CamShift的目标跟踪算法
张宏志;张金换;岳卉;黄世霖
【期刊名称】《计算机工程与设计》
【年(卷),期】2006(27)11
【摘要】CamShift是一种应用颜色信息的跟踪算法,在跟踪过程中,CamShift利用目标的颜色直方图模型得到每帧图像的颜色投影图,并根据上一帧跟踪的结果自适应调整搜索窗口的位置和大小,从而得到当前图像中目标的尺寸和中心位置.在CamShift算法基础上对搜索窗口进行简单运动预测,并增加二次搜索方法,提高跟踪的稳定性.实验结果表明,在图像背景复杂且目标不规则运动的情形下,仍能有效地跟踪到目标.
【总页数】3页(P2012-2014)
【作者】张宏志;张金换;岳卉;黄世霖
【作者单位】清华大学,汽车安全与节能国家重点实验室,北京,100084;清华大学,汽车安全与节能国家重点实验室,北京,100084;清华大学,汽车安全与节能国家重点实验室,北京,100084;清华大学,汽车安全与节能国家重点实验室,北京,100084
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CamShift的监控视频中运动目标跟踪算法研究 [J], 李亚文;赵杰;张鑫
2.基于Camshift的运动目标检测跟踪算法 [J], 邢定宇;侯宝临;秦明伟
3.基于改进帧间差分与局部Camshift相结合的目标跟踪算法 [J], 周文静;陈玮
4.基于SURF和Camshift的目标跟踪算法研究 [J], 李建建;王春阳
5.基于Kalman滤波的CAMShift目标跟踪算法 [J], 马洪涛; 吴赛敏
因版权原因,仅展示原文概要,查看原文内容请购买。
camshift算法原理

camshift算法原理Camshift算法是一种基于颜色统计的物体跟踪算法,常被用于计算机视觉领域中的目标跟踪任务。
该算法通过对目标对象的颜色特征进行建模,并在视频序列中实时追踪目标的位置和大小。
Camshift算法的原理基于直方图反向投影技术和Meanshift算法。
首先,算法通过用户选取的初始目标区域,计算该区域的颜色直方图模型。
然后,将该直方图模型与整幅图像的直方图进行比较,得到反向投影图像。
反向投影图像中的每个像素值表示该像素属于目标对象的概率。
接下来,利用Meanshift算法对反向投影图像进行均值漂移操作,寻找目标对象的最大概率区域。
均值漂移操作的原理是根据概率分布的重心不断迭代,使得目标区域的中心点逐渐向最大概率区域移动。
这样,在每次迭代过程中,目标区域的位置和大小都会根据图像的颜色分布而自适应地调整。
为了进一步提高目标区域的准确性和稳定性,Camshift算法引入了一个自适应窗口大小的机制。
在Meanshift算法的每次迭代中,算法会根据当前目标区域的大小,自动调整搜索窗口的大小。
当目标对象静止或运动缓慢时,窗口大小会自动缩小以提高精度;当目标对象运动较快时,窗口大小会自动扩大以保持目标的完整性。
Camshift算法还可以通过加权直方图模型来对目标对象的颜色特征进行动态更新。
在每次迭代中,算法会根据当前目标区域的位置和大小,调整颜色直方图的权重,使其更好地适应目标对象的变化。
总结来说,Camshift算法通过对目标对象的颜色特征进行建模和追踪,能够在复杂的背景环境中实现准确、稳定的目标跟踪。
该算法的原理基于直方图反向投影和Meanshift算法,通过自适应窗口大小和加权直方图模型的机制,能够适应目标对象的位置、大小和颜色的变化,具有较高的鲁棒性和实时性。
在计算机视觉和视频分析领域中,Camshift算法被广泛应用于目标跟踪、行为分析、视频监控等方面,为实现智能视觉系统提供了重要的技术支持。
基于Camshift 方法的视觉目标跟踪技术综述

基于Camshift 方法的视觉目标跟踪技术综述作者:伍祥张晓荣潘涛朱文武来源:《电脑知识与技术》2024年第17期摘要:视觉目标跟踪技术是机器视觉、模式识别等相关领域中重要的研究内容之一。
受限于场景的复杂度、目标速度、目标的遮挡程度等状况,其相关研究具有一定的难度和挑战性,而均值漂移及其相关算法是解决该类问题的重要途径。
首先介绍视觉目标跟踪的研究方法和原理,然后介绍Camshift方法的前身Meanshift方法的原理和算法过程,并做出相应的分析和阐述。
再介绍针对Camshift算法的相关研究和改进方法,最后总结Camshift方法的应用情况以及后续可能的研究方向。
关键词:机器视觉;模式识别;目标跟踪;Meanshift;Camshift中图分类号:TP391 文献标识码:A文章编号:1009-3044(2024)17-0011-04 开放科学(资源服务)标识码(OSID):0 引言实现视觉目标跟踪可能的前置步骤包括目标分类、物体检测以及图像分割。
目标分类是指根据目标在图像中呈现的特征,将不同类别的目标加以区分的图像处理方法。
物体检测是指在某张图像中,检测出目标出现的位置、尺度以及其對应的类别。
相较于目标分类,物体检测不仅需要指出其类别,还需返回该目标在图像中的物理坐标信息,其量化度得到了增强。
而图像分割在物体检测的基础上提出了更加精细的要求,即不仅需要指出物体在图像中的坐标位置信息,还要标注出目标在图像中的精准轮廓,其难度和复杂度进一步提升。
上述技术在图像处理过程中,存在一些共性化的技术难点,比如尺度变化、部分遮挡等[1-2]。
针对物体尺度变化,一种常规的方式是采用尺度不变特征变换(SIFT)技术[3],通过尺度空间极值计算、关键点定位、方向和幅值计算以及关键点描述等步骤完成目标在尺度变化时的特征匹配。
针对目标部分区域被遮挡的问题,Wang B等[4]提出了一种通过网络流优化的轨迹片段(tracklet)关联中的在线目标特定度量来忽略目标被遮挡的时段,从而连续化目标运动轨迹;Fir⁃ouznia Marjan[5]提出了一种改进的粒子滤波方法,通过状态空间重构,在有遮挡的情况下提升目标跟踪的精度。
基于改进的Camshift算法的目标跟踪研究
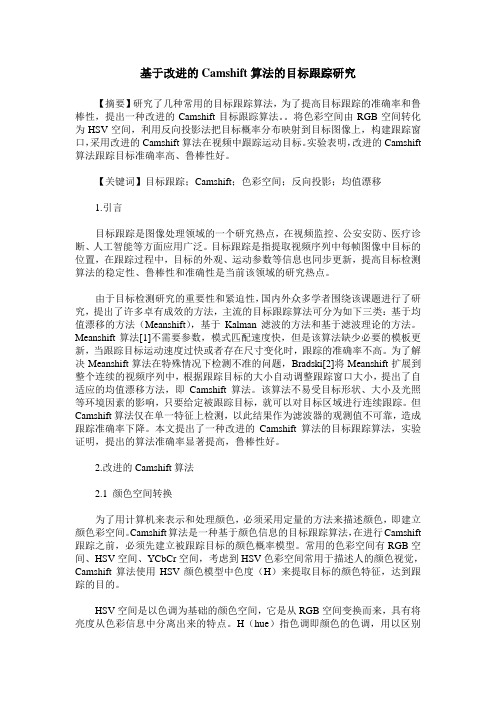
基于改进的Camshift算法的目标跟踪研究【摘要】研究了几种常用的目标跟踪算法,为了提高目标跟踪的准确率和鲁棒性,提出一种改进的Camshift目标跟踪算法。
将色彩空间由RGB空间转化为HSV空间,利用反向投影法把目标概率分布映射到目标图像上,构建跟踪窗口,采用改进的Camshift算法在视频中跟踪运动目标。
实验表明,改进的Camshift 算法跟踪目标准确率高、鲁棒性好。
【关键词】目标跟踪;Camshift;色彩空间;反向投影;均值漂移1.引言目标跟踪是图像处理领域的一个研究热点,在视频监控、公安安防、医疗诊断、人工智能等方面应用广泛。
目标跟踪是指提取视频序列中每帧图像中目标的位置,在跟踪过程中,目标的外观、运动参数等信息也同步更新,提高目标检测算法的稳定性、鲁棒性和准确性是当前该领域的研究热点。
由于目标检测研究的重要性和紧迫性,国内外众多学者围绕该课题进行了研究,提出了许多卓有成效的方法,主流的目标跟踪算法可分为如下三类:基于均值漂移的方法(Meanshift),基于Kalman滤波的方法和基于滤波理论的方法。
Meanshift算法[1]不需要参数,模式匹配速度快,但是该算法缺少必要的模板更新,当跟踪目标运动速度过快或者存在尺寸变化时,跟踪的准确率不高。
为了解决Meanshift算法在特殊情况下检测不准的问题,Bradski[2]将Meanshift扩展到整个连续的视频序列中,根据跟踪目标的大小自动调整跟踪窗口大小,提出了自适应的均值漂移方法,即Camshift算法。
该算法不易受目标形状、大小及光照等环境因素的影响,只要给定被跟踪目标,就可以对目标区域进行连续跟踪。
但Camshift算法仅在单一特征上检测,以此结果作为滤波器的观测值不可靠,造成跟踪准确率下降。
本文提出了一种改进的Camshift算法的目标跟踪算法,实验证明,提出的算法准确率显著提高,鲁棒性好。
2.改进的Camshift算法2.1 颜色空间转换为了用计算机来表示和处理颜色,必须采用定量的方法来描述颜色,即建立颜色彩空间。
基于HSV非均匀量化的CAMshift目标跟踪算法
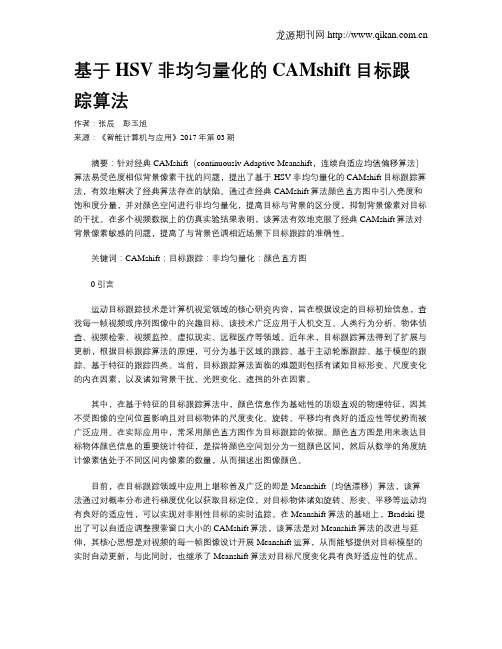
基于HSV非均匀量化的CAMshift目标跟踪算法作者:张辰彭玉旭来源:《智能计算机与应用》2017年第03期摘要:针对经典CAMshift(continuouslv Adaptive Meanshift,连续自适应均值偏移算法)算法易受色度相似背景像素干扰的问题,提出了基于HSV非均匀量化的CAMshift目标跟踪算法,有效地解决了经典算法存在的缺陷。
通过在经典CAMshift算法颜色直方图中引入亮度和饱和度分量,并对颜色空间进行非均匀量化,提高目标与背景的区分度,抑制背景像素对目标的干扰。
在多个视频数据上的仿真实验结果表明,该算法有效地克服了经典CAMshift算法对背景像素敏感的问题,提高了与背景色调相近场景下目标跟踪的准确性。
关键词:CAMshift;目标跟踪:非均匀量化:颜色直方图0引言运动目标跟踪技术是计算机视觉领域的核心研究内容,旨在根据设定的目标初始信息,查找每一帧视频或序列图像中的兴趣目标。
该技术广泛应用于人机交互、人类行为分析、物体侦查、视频检索、视频监控、虚拟现实、远程医疗等领域。
近年来,目标跟踪算法得到了扩展与更新,根据目标跟踪算法的原理,可分为基于区域的跟踪、基于主动轮廓跟踪、基于模型的跟踪、基于特征的跟踪四类。
当前,目标跟踪算法面临的难题则包括有诸如目标形变、尺度变化的内在因素,以及诸如背景干扰、光照变化、遮挡的外在因素。
其中,在基于特征的目标跟踪算法中,颜色信息作为基础性的顶级直观的物理特征,因其不受图像的空间位置影响且对目标物体的尺度变化、旋转、平移均有良好的适应性等优势而被广泛应用。
在实际应用中,常采用颜色直方图作为目标跟踪的依据。
颜色直方图是用来表达目标物体颜色信息的重要统计特征,是指将颜色空间划分为一组颜色区间,然后从数学的角度统计像素值处于不同区间内像素的数量,从而描述出图像颜色。
目前,在目标跟踪领域中应用上堪称普及广泛的即是Meanshift(均值漂移)算法,该算法通过对概率分布进行梯度优化以获取目标定位,对目标物体诸如旋转、形变、平移等运动均有良好的适应性,可以实现对非刚性目标的实时追踪。
基于三维直方图的改进Camshift目标跟踪算法

基于三维直方图的改进Camshift目标跟踪算法覃跃虎;支琤;徐奕【摘要】The classcial Camshift (continuously adaptive mean-shift) algorithm builds a one-dimensional histogram only with Hue component from HSV color space,which may lead to the failure of tracking when interferes by illumination variation and similar color object or background. To solve this problem,an improved algorithm based on a three dimensional histogram is proposed,which is built with hue and saturation components from HSV space and edge gradient from object’s s hape informa-tion. The object tracking accuracy of the algorithm under background interference was improved on the basis of the weighted value of these three components of background model adaptive adjustment histogram. Compared with the traditional Camshift al-gorithm,experimental results indicate that tracking failure incurred by illumination variations and interference from similar color object or background can be alleviated in the proposed algorithm. The improved algorithm can meet the applicability require-ments of real-time tracking systems.%经典的连续自适应均值漂移算法Camshift通过HSV空间的色调Hue 分量建立一维直方图,在有光照变化及有相似颜色目标或背景的干扰下,跟踪效果不好。
基于颜色直方图和深度信息的 CamShift 目标跟踪算法

基于颜色直方图和深度信息的 CamShift 目标跟踪算法顾超【摘要】基于颜色直方图的CamShift目标跟踪方法不能适应复杂环境,特别是环境中有相似颜色干扰的情况。
针对这一不足,提出了一种基于颜色直方图和深度信息的CamShift目标跟踪方法。
通过对比试验,证明深度信息的引入,大大削弱了复杂环境对跟踪效果的影响,提高了目标跟踪的鲁棒性。
%Cam Shift target tracking method based on color histogram can not adapt to the complex envi-ronment, especially when there are some similar color interference in the environment.For this shortage, this pa-per proposed a Cam Shift target tracking method based on color histogram and depth information.Through the contrast test, it is proved that the introduction of the depth information greatly weakened the effects of the com-plex environment for tracking and improve target tracking robustness.【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2015(000)004【总页数】4页(P577-580)【关键词】目标跟踪;连续自适应均值漂移算法;深度信息【作者】顾超【作者单位】东南大学机械工程学院,江苏南京211189【正文语种】中文【中图分类】TP391.410 引言近年来,目标实时跟踪是视觉识别以及图像处理领域中备受关注的前沿方向.摄像头获取图像信息后,选中目标,然后实时跟踪目标.实现目标跟踪的关键在于合理的提取特征和准确的识别目标,同时要考虑算法实现的时间,保证实时性.目前,许多目标跟踪算法都已在工程中得到运用,运用较为广泛的算法有:(1)基于模板匹配的目标跟踪算法[1],这一算法的基本原理是,首先选取跟踪目标的特征(一般是边缘特征),作为模板,然后在以后的每一帧中,搜寻此模板,实现目标的跟踪.这种方法匹配速度比较慢,对噪声敏感,不适应匹配对象在旋转和缩放情况下的匹配问题.(2)粒子群优化(PSO)算法是一种基于群体智能的技术[2],该算法从一组随机解出发,通过迭代搜寻最优解,但是它没有像遗传算法那样应用交叉和变异算子,而是粒子在解空间追随最优的粒子进行搜索.该算法虽然取得了一定的成功,但该算法存在局部搜索能力差的缺点,不适合复杂环境下的目标跟踪.(3)TLD目标跟踪算法[3],TLD 即Tracking-Learning-Detection 的缩写,译为“跟踪-学习-检测”.顾名思义,TLD 目标跟踪有三部分组成,包括跟踪器、学习过程和检测器.在系统运作后,跟踪器和检测器并不是顺序工作,二者同时工作,不分先后.跟踪与检测的结果都作用于学习过程,学习的结果又反作用于跟踪器和检测器,系统得以实时更新,这样就形成一个闭环的跟踪系统,解决了跟踪目标外观变化带来的影响.TLD 技术有效的融合了跟踪与检测的过程,是一种自我更新的跟踪技术,但此方法具有较高计算量,算法还不成熟.(4)MeanShift 跟踪算法[4],是一种在一组数据的密度分布中寻找局部极值的稳定方法,稳定是相对的,在背景干扰较大以及目标被遮挡的情况,易出现跟踪目标丢失的情况.针对上述各种方法的不足,本文提出一种基于基于颜色直方图和深度信息的CamShift 目标追踪算法.1 基于颜色直方图和深度信息的CamShift 目标追踪算法CamShift 算法的全称是"Continuously Adaptive Mean-Shift",即连续自适应的MeanShift 算法[5].“连续”是指该算法将对视频序列的每一帧都做meanshift 迭代,“自适应”是指该算法搜索窗口会自我调整尺寸.CamShift 算法具体步骤如下:(1)选中搜索目标,记录输入的搜索窗口.(2)根据颜色直方图求出跟踪目标的反向投影图.(3)在反向投影图上进行meanshift 迭代,meanshift 向量指向重心,体现在反向投影图上就是向概率密度大的地方移动,最终移动到目标上.(4)在操作下一帧图像时,参与迭代的搜索窗口用前一帧输出的窗口更新.1.1 初始目标区域的获取目标区域的初始化是指,在视频序列的第一帧图像之中,用一个窗口(窗口可以使对称的或歪斜的),获取初始目标区域的位置以及大小信息,由此可以计算出他的颜色直方图,一单确定了目标区域,就可以启动目标跟踪,目标区域在跟踪过程中自行调整.图1 彩色图(左)与反向投影图(右)图2 彩色图(左)与反向投影图(右)1.2 计算当前帧颜色直方图的反向投影图直方图是一种数据分布的统计图[6],这些统计数据可以是诸如梯度、方向、色彩或其他特征,将统计数据组织到一系列事先定义好的bin 中,最终每个bin 的值都是相关数据的统计总量.在视觉跟踪领域,由于颜色特征不受物体扭曲、旋转等的影响,所以一般取颜色作为直方图统计对象.摄像头输出的图像格式一般为RGB 格式或YUV 格式,这两种数据格式离散而复杂,给后期处理带来麻烦.所以首先要将RGB 格式转化成一种有利于数字化操作的格式,这就涉及到颜色空间的转换[7].在各种颜色空间中,HSI 模型可以满足需求,HSI 中的H 分量表示色调,S 分量表示饱和度,I 表示强度.由于色调表示人的感官对不同颜色的感受,所以在颜色数据的处理时,可以将其他的色彩空间的值转化到HSI 空间,提取其中的H 分量,求出H 分量的颜色直方图.根据获得的颜色直方图将原始图像转化成色彩概率分布图像,这个过程就被称作求反向投影.反向投影图与输入图像的大小相同,每点像素值设为颜色直方图中相关的bin 值.如果直方图是归一化的,此值便于一个概率值相关.以下是检验步骤: (1)对测试图像中的每个像素(p(i,j)),获取色调数据并找到该色调(hi,j,si,j)在直方图中的bin 位置.(2)查询模型直方图中对应bin 的数值.(3)将此数值存储在新的反向投影图像中.也可以先归一化直方图数值到0 ~255 范围,这样可以直接显示反向投影图像(单通道图像).这样,如果颜色相似度越高,bin 数值就越大,体现在反向投影图中就越白.(4)通过测试图像中的每个像素采用以上步骤,可以得到最终的反向投影图像.在图1(左),选取一个方形的目标物,提取颜色直方图,得到反向投影图1(右).图3 Meanshift 向量图图4 Meanshift 迭代结果1.3 融合深度信息的反向投影图仅有颜色信息的反向投影图中,需要跟踪的目标易与环境中同颜色物体相混淆,如上图所示,图像中亮的部分为与跟踪目标相同颜色分布的物体,因此会给下面的处理造成很大的麻烦,有可能导致追踪失败.由此,需要一定的滤波方法,处理这些干扰.深度信息是指场景中所有物体到摄像机的距离,不同的距离将会被转化成不同的灰度值,形成明暗层次鲜明的深度图.微软公司的kinect 摄像机可以同时给出深度图与彩色图,并且两幅图大小可以设为相同的640*480,每个像素点一一对应,所以融合深度信息的颜色直方图反向投影成为可能.所谓融合深度信息的反向投影图,就是在原有的颜色直方图反向投影图的基础上,以深度数据为权重,达到滤波的目的.具体步骤如下.假设在当前帧,跟踪目标的质心离摄像机的距离为d,两帧图像之间目标的移动距离大约为m.于是在下一帧,深度图中数值在(d-2m,d+2m)区间的像素点将会以权重系数值1 映射到反向投影图中,即原来值为a,处理后将变成a*1.深度数值在(d-4m,d-2m)U(d+2m,d+4m)区间的像素点将会以权重系数值0.8 映射到反向投影图中,即原来值若为b,处理后变为b*0.8.以此类推,根据深度值偏移的大小赋予相应的权重系数.上面描述中,权重系数可按实际情况修改.融合深度信息的反向投影如图2.1.4 根据投影图和输入的方框进行meanshift 迭代Meanshift 算法是一种在一组数据的密度分布中寻找局部极值的稳定的方法,meanshift 只估计数据分布的梯度(变化方向),变化为0 的地方则表示是这个分布的峰值(虽然可能是局部的).Meanshift 算法步骤如下:(1)选择搜索窗口.(2)计算窗口的重心:设(x,y)是搜索窗口的像素点,I(x,y)是对应反向投影图中(x,y)的像素值,搜索窗口的零阶矩M00,一阶矩M10,M01 计算如下:像素分布的重心为:(3)将窗口的中心移动到重心处:Meanshift矢量公式(3),其中Sk 为搜索窗口,xi是指窗口内的每一个点,x 是指窗口的中心,Mh 是所有点的合成矢量.从公式可以得出,窗口中心将会向着重心的方向移动,每一次移动之后将得到一个新的中心,直到中心和重心重合,迭代结束.具体步骤如下:1)以搜索窗口的中心为圆心,搜索框内所有点都会和圆心产生一个向量,然后把这些向量都相加,相加的结果就是Meanshift 向量,如图3.2)再以meanshift 向量的终点为圆心,重复以上步骤,就可得到一个新的meanshift 向量.如此重复下去,meanshift 算法可以收敛到概率密度最大得地方.也就是最稠密的地方,最终结果如图4.1.5 重新初始化搜索窗的大小和位置要实现对目标的实时追踪,需要对每一帧图像都作MeanShift 运算,并将上一帧的结果(即搜索窗口的中心位置和窗口大小)作为下一帧搜索窗口的初始值,更新搜索窗口,如此一来,即使跟踪目标的大小变化或者外形扭曲等,该算法也可以自我更新搜索窗口继续跟踪.2 实验对比分析表1 包括两个实验,实验1 采用本文所论述的基于跟踪方法,实验2 采用仅基于颜色直方图的Camshift 这一传统的跟踪方法.两个实验在同一实验环境下进行,检测两种方法跟踪目标物体的鲁棒性.实验1 中,手持目标物体移动到相似颜色的大物体附近,然后再移开目标物体,整个过程中,跟踪环始终跟随目标物移动.实验2 中,采用和实验1同样的检测方法,当目标物体靠近相似颜色物时,跟踪环发生偏移,不再跟随目标物.对比两个实验结果,融合基于颜色直方图与深度信息的跟踪方法较仅基于颜色直方图的传统跟踪方法在跟踪目标物体鲁棒性方面有较大改进.3 结论在视觉跟踪领域,对于含有相似物体的环境或是环境较为复杂的情况,单独用颜色跟踪不能获得良好的效果,本文提出一种融合颜色信息和深度信息的跟踪方案.实验结果表明,该方案的跟踪性能较传统方案有较强的鲁棒性.表1 对比实验结果?参考文献:[1]付永会,张风超,张宪民.一种改进的基于颜色直方图的实时目标跟踪算法[J].数据采集与处理,2001,(03):309-314.[2]唐红艳,徐正光.基于PSO-RBF 的神经网络及其应用[A].冶金自动化研究设计院.全国炼钢连铸过程自动化技术交流会论文集[C].冶金自动化研究设计院,2006,(3).[3]李晓飞.基于视觉的船舶跟踪与三维定位技术研究与应用[D].广东工业大学,2014.[4]王年,丁业兵,唐俊,等.带宽自适应的Mean-Shift 目标跟踪算法[J].华南理工大学学报(自然科学版),2011,39,(10):44-49.[5]刘双.动态融合梯度信息的Camshift 算法改进研究[J].无线互联科技,2014,04:181-183.[6]汪启伟.图像直方图特征及其应用研究[D].合肥:中国科学技术大学,2014. [7]张学习,杨宜民.彩色图像工程中常用颜色空间及其转换[J].计算机工程与设计,2008,29(5):1210-1212.。
基于改进CAMShift的运动目标跟踪算法

基于改进CAMShift的运动目标跟踪算法刘超;惠晶【期刊名称】《计算机工程与应用》【年(卷),期】2014(000)011【摘要】For the problem of Mean Shift algorithm extracting the target color features easily affected by the background, this paper selects non-linear kernel density estimation to detect single moving object, then uses CAMShift method to track the detected target, combined with test resultsof nonlinear kernel density estimation to do adaptive update of target histo-gram. This article also gives solution of target occlusion problem. Experimental results show that the method which com-bines the foreground detection and CAMShift can achieve automatic tracking of moving target, as well as adaptive update of target histogram. The reliable performance of this algorithm can satisfy real-time requirement, and eliminate the effects of unstable scene illumination and object occlusion.%针对视频序列图像目标跟踪中Mean Shift算法提取目标颜色特征易受背景影响的问题,首先选取非线性核密度估计方法用来进行运动目标的检测,然后采用CAMShift方法对检测到的目标进行跟踪,并结合非线性核密度估计的检测结果对目标直方图进行自适应更新。
Camshift目标跟踪算法改进研究

Camshift目标跟踪算法改进研究Wang Weicheng【摘要】Camshift目标跟踪算法是基于颜色特征信息,在视频目标跟踪过程中依据目标的颜色特征直方图计算每帧图像的反向投影图,并将上一帧跟踪目标的位置和大小作为当前帧目标搜索窗口初始化的位置和大小.为了能够有效地跟踪运动目标,利用基于Kalman滤波方法改进的Camshift算法实现目标跟踪;为了提高跟踪的稳定性和有效性,引入粒子滤波算法校正Camshift算法的目标中心位置,在不影响跟踪实时性的前提下,提高了目标跟踪的鲁棒性.实验结果表明:在图像背景复杂且目标被长时间遮挡的情形下,该方法仍能有效地实现目标跟踪.【期刊名称】《石油化工自动化》【年(卷),期】2019(055)001【总页数】5页(P35-38,65)【关键词】Kalman滤波算法;Camshift算法;粒子滤波算法;目标跟踪【作者】Wang Weicheng【作者单位】【正文语种】中文【中图分类】TP391.4运动目标跟踪一直是计算机视觉研究领域的热门课题之一,它是视频监控和安防系统中不可或缺的一部分。
传统的目标跟踪方法通常存在着鲁棒性和实时性的矛盾,一般情况下,在视频图像序列中,被跟踪的物体存在着旋转、被遮挡、与背景相融合等现象,在进行目标跟踪时,利用简单的模板匹配方法难以达到理想的效果,且容易出现误匹配和目标跟踪丢失等情况。
目前,传统的Camshift算法被用来解决上述问题,该算法利用目标的颜色直方图表示目标颜色概率出现的大小,目标的颜色直方图仅和目标自身的颜色相关,不受其形状变化的影响,可以有效地解决物体变形的问题。
虽然传统的Camshift算法原理简单,运算效率高,然而却无法很好地处理物体被遮挡或与背景融合等情况。
针对传统的Camshift算法的不足之处,本文在传统Camshift目标跟踪方法的基础上,提出了Kalman滤波算法预测运动目标位置和粒子滤波算法进行目标中心位置校正的Camshift改进算法,并通过实验验证了该算法的有效性和鲁棒性。
一种基于颜色和边缘特征的Mean Shift目标跟踪算法

一种基于颜色和边缘特征的Mean Shift目标跟踪算法石祥滨;乔利英;刘芳;吴杰宏【摘要】针对基于颜色特征的Mean Shift算法对动态变化环境适应能力差,容易丢失跟踪目标的问题,提出了一种颜色和边缘特征相结合的Mean Shift目标跟踪算法.该算法使用核直方图概率模型描述目标,通过权值的自适应变化来评估每个特征在跟踪场景中的可靠性,并依据权值提出一种选择性模板更新方法.实验结果表明,提出的算法不仅可以克服目标在跟踪过程中发生的模板变形,而且对目标的平移旋转以及光照变化都具有较好的鲁棒性.【期刊名称】《沈阳航空航天大学学报》【年(卷),期】2012(029)001【总页数】6页(P52-57)【关键词】目标跟踪;均值漂移;自适应;模板更新【作者】石祥滨;乔利英;刘芳;吴杰宏【作者单位】沈阳航空航天大学计算机学院,沈阳110136;沈阳航空航天大学计算机学院,沈阳110136;沈阳航空航天大学计算机学院,沈阳110136;沈阳航空航天大学工程训练中心,沈阳110136【正文语种】中文【中图分类】TP391.41在动态环境下进行目标跟踪是当今机器视觉中的一个研究热点和难点,并被广泛应用于军用和民用领域。
目前,国内外学者提出了许多不同的跟踪算法[1-3],但是这些算法大都是面向特定应用环境的。
为了提高跟踪的鲁棒性,许多人研究认为利用多个特征进行目标跟踪是解决这一问题的有效途径。
但是,多特征跟踪存在的两个问题即如何合理选择目标特征以及如何构造有效的融合机制。
文献[4]使用串行结构处理多个视觉线索,最大的特点就是跟踪系统对环境和场景变化的自组织和自适应力强。
Collins等[5]将一种在线多特征自适应选择机制嵌入在均值漂移跟踪方法中,但该方法本质上还是只利用了目标的颜色特征,当目标和背景相似时其跟踪效果较差。
对此,文献[6]提出的算法从颜色和形状-纹理等7个特征分量中选择前两个较可靠的特征集合来描述目标,并且跟踪过程中对模板进行了更新。
基于CamShift与混合高斯模型的目标跟踪与提取算法

基于CamShift与混合高斯模型的目标跟踪与提取算法乔国娜
【期刊名称】《计算机与数字工程》
【年(卷),期】2016(0)6
【摘要】为了解决当前在复杂背景下视频目标存在跟踪提取不准确与不稳定等不足,论文设计了基于CamShift与混合高斯模型的目标跟踪与提取算法.首先,耦合MeanShift与CamShift算法,定义了目标跟踪算子,完成对目标的精确定位;然后计算图像像素灰度的均值与方差,设计混合高斯模型,实现定位目标与背景的分离;最后基于OpenCV开源函数,利用C++编程实现算法跟踪与提取功能.实验数据显示:与当前目标跟踪算法相比,在面对复杂背景条件下的运动目标跟踪提取时,论文技术拥有更高的追踪精度与稳定性.
【总页数】5页(P1053-1056,1063)
【作者】乔国娜
【作者单位】陕西工业职业技术学院信息工程学院咸阳712000
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于混合高斯模型的目标跟踪系统设计 [J], 王亚梅;曹永军;周磊
2.基于混合高斯模型和帧差的火焰前景提取算法 [J], 张生杰;张为
3.基于混合高斯模型的窄带目标跟踪方法 [J], 曾绮雯;葛辉良
4.基于混合高斯模型的运动目标跟踪算法 [J], 王金洋;余红英;樊永生
5.基于改进混合高斯模型的前景目标提取算法 [J], 李勇
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SURF和Camshift的目标跟踪算法研究
基于SURF和Camshift的目标跟踪算法研究
李建建;王春阳
【期刊名称】《长春理工大学学报(自然科学版)》
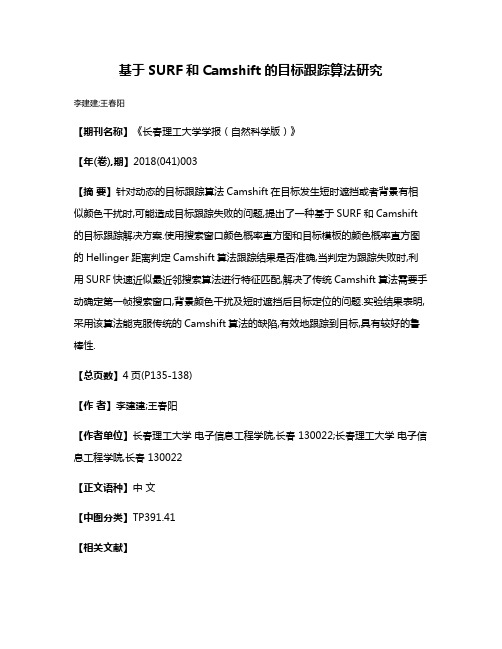
【年(卷),期】2018(041)003
【摘要】针对动态的目标跟踪算法Camshift在目标发生短时遮挡或者背景有相似颜色干扰时,可能造成目标跟踪失败的问题,提出了一种基于SURF和Camshift 的目标跟踪解决方案.使用搜索窗口颜色概率直方图和目标模板的颜色概率直方图的Hellinger距离判定Camshift算法跟踪结果是否准确,当判定为跟踪失败时,利用SURF快速近似最近邻搜索算法进行特征匹配,解决了传统Camshift算法需要手动确定第一帧搜索窗口,背景颜色干扰及短时遮挡后目标定位的问题.实验结果表明,采用该算法能克服传统的Camshift算法的缺陷,有效地跟踪到目标,具有较好的鲁棒性.
【总页数】4页(P135-138)
【作者】李建建;王春阳
【作者单位】长春理工大学电子信息工程学院,长春 130022;长春理工大学电子信息工程学院,长春 130022
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于SURF和Camshift的运动目标跟踪 [J], 郭金朋;战荫伟;李雪武
2.基于Camshift和SURF的目标跟踪系统 [J], 陈杏源;郑烈心;裴海龙
3.基于Kalman和Surf的Camshift目标跟踪研究 [J], 王超;苏湛
4.基于SURF和Camshift的目标跟踪算法研究 [J], 李建建;王春阳
5.基于Kalman和Surf的Camshift目标跟踪研究 [J], 王超;苏湛
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t rg a e t a n d b a c k g r o u n d,t h u s s u p p r e s s e s t h e i n t e f r e r e n c e o f t h e b a c k g r o u n d p i x e l t o t h e t rg a e t .S i mu l a t i o n r e s u l t s b a s e d o n
跟 踪 的准 确 性 。
关键词 : C A M s h i f t ;目标跟踪 ; 非均匀量化 ; 颜色直方 图
中图分 类号 : T P 3 9 1 . 4
文献标志码 :A
文章编 号 : 2 0 9 5 - 2 1 6 3 ( 2 0 1 7 ) 0 3 — 0 0 2 1 — 0 5
Ab s t r a c t :B e c a u s e t h e c l a s s i c C AMs h i t f a l g o i r t h m i S v u l n e r a b l e t o t h e p i x e l i n t e r f e r e n c e o f a s i mi l a r b a c k g r o u n d c o l o r .t h e
ZHANG Ch e n ,PENG Yu x u '
( 1 S c h o o l o fC o m p u t e r &C o mm u n i c a t i o n E n g i n e e r i n g, C h a n g s h a U n i v e r s i t y fS o c i e n c e &T e c h n o l o g y ,C h a n g s h a 4 1 0 1 1 4 , C h i n a; 2 H u an n P r o v i n c i a l K e y L a b o r a t o r y o fI n t e l l i g e n t P r o c e s s i n g fB o i g D a t a o n T r a n s p o r t a t i o n f C h a n g s h a U n i v e r s i t y fS o c i e ce& n T e c h ol n o g y ) , C h a n g s h a 4 1 0 1 1 4 ,C h i a) n
c l a s s i c C AMs h i f t a l g o r i t h m.B y i n t r o d u c i n g t h e l u mi n a n c e a n d s a t u r a t i o n c o mp o n e n t s t o t h e c o l o r h i s t o g r a m o f t h e c l a s s i c CAMs h i f t a l g o i r h m t a n d n o n — u n i f o r ml y q u a n t i z i n g t h e c o l o r s p a c e ,t h e d e s i g n e d lg a o i r t h m i mp r o v e s t h e d i s c i r mi n a t i o n o f t h e
第 7卷
第 3期
智
能
计
算
机
与
应
用
V0 l _ 7 No . 3
2 0 1 7年 6月
I n t e l l i g e n t C o mp u tn s
J u n . 2 01 7
基 于 HS V 非均 匀 量 化 的 C A Ms h i f t目标 跟 踪 算 法
Mo d i i f e d C AMs h i f t a l g o r i t h m f o r o b j e c t t r a c k i n g b a s e d
o n H SV n o n. un i or f m qu a nt i z a t i o n
张 辰 ,彭玉旭 ,
( 1 长沙理工大学 计算机与通信工程学院 , 长沙 4 1 0 1 1 4 ; 2综合 交通运输 大数据 智能处理湖南省重点实验室 ( 长沙理工大学 ) , 长沙 4 1 0 1 1 4 )
摘 要: 针对经典 C A M s h i i f ( C o n t i n u o u s l y A d a p t i v e M e a n s h i i f , 连续 自 适应均值偏移算 法) 算法 易受色度相 似背景像 素干扰 的问题 , 提 出了基于 H S V非均匀量化的 C A M s h i f t 目 标跟踪算法 , 有效地解决 了经典算法存在 的缺陷。通过在经典 C A M s h i i算法颜色 直方 f 图 中引入亮度和饱和度分量 , 并对颜色空间进行非均匀量化 , 提高 目标与背景的区分度 , 抑制背景像 素对 目 标 的干扰 。在多个视 频 数据上 的仿真实验结果表 明, 该算法有效地克服 了经典 C A M s h i i f 算法对背景像素敏感的 问题 , 提高 了与背景 色调相近场景下 目标
C A Ms h i t f o b j e c t t r a c k i n g a l g o i r t h m b a s e d o n n o n ・ u n i f o r m q u a n t i z a t i o n o f H S V i s p r o p o s e d t o e f e c t i v e l y s o l v e t h e l f a w s o f t h e