飞思卡尔智能车大赛的资料共21页文档
第九届飞思卡尔智能车竞赛材料清单V3.0

本材料表一共有9页,每个宝贝后面都附带有链接第九届飞思卡尔智能车竞赛光电组材料表(XS128)序号名称单价(元)数量总计(元)链接1MC9S12XS128最小系统(16位)78.75178.75详情2BDM下载器(集成USB转串口)52.5152.5详情3线性CCD模块1201120详情4偏振片15115详情5线性CCD安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7舵机支架40140详情8舵机转向舵盘39.6139.6详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM2940电源芯片428详情12LM2940元件包0.320.6详情13200线编码器(单相)128.11128.1详情14编码器支架12112详情15编码器齿轮(B车)15.2115.2详情16OLED显示屏34.3134.3详情17第9届飞思卡尔竞赛指定B车模详情总计第九届飞思卡尔智能车竞赛光电组材料表(K60)序号名称单价(元)数量总计(元)链接1MK60DN512ZVLL10最小系统(32位)110.71110.7详情2OSJTAG下载器(集成USB转串口)84184详情3线性CCD模块1201120详情4偏振片15115详情5线性CCD安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7舵机支架40140详情8舵机转向舵盘39.6139.6详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM1117-3.3电源芯片428详情12LM1117-3.3元件包0.320.6详情13LM2940电源芯片428详情14LM2940元件包0.320.6详情15200线编码器(单相)128.11128.1详情16编码器支架12112详情17编码器齿轮(B车)15.2115.2详情18OLED显示屏34.3134.3详情19第9届飞思卡尔竞赛指定B车模详情总计第九届飞思卡尔智能车竞赛光电组材料表(MCF52255)序号名称单价(元)数量总计(元)链接1MCF52255最小系统(32位)110.71110.7详情2BDM下载器84184详情3线性CCD模块1201120详情4偏振片15115详情5线性CCD安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7舵机支架40140详情8舵机转向舵盘39.6139.6详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM1117-3.3电源芯片428详情12LM1117-3.3元件包0.320.6详情13LM2940电源芯片428详情14LM2940元件包0.320.6详情15200线编码器(单相)128.11128.1详情16编码器支架12112详情17编码器齿轮(B车)15.2115.2详情18OLED显示屏34.3134.3详情19第9届飞思卡尔竞赛指定B车模详情总计711.1元第九届飞思卡尔智能车竞赛摄像头组材料表(XS128)序号名称单价(元)数量总计(元)链接1MC9S12XS128最小系统(16位)78.75178.75详情2BDM下载器(集成USB转串口)52.5152.5详情3摄像头模块OV76201201120详情4偏振片15115详情5摄像头安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7MMA7361加速度传感器模块(三轴)21121详情8ENC-03MB陀螺仪模块(双轴)75175详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM2940电源芯片428详情12LM2940元件包0.320.6详情13200线编码器(双相)147.251147.25详情14编码器支架12112详情15编码器齿轮(D车)15.2115.2详情16OLED显示屏34.3134.3详情17第9届飞思卡尔竞赛指定D车模详情18第9届飞思卡尔竞赛指定E车模详情总计765.6元第九届飞思卡尔智能车竞赛摄像头组材料表(K60)序号名称单价(元)数量总计(元)链接1MK60DN512ZVLL10最小系统(32位)110.71110.7详情2OSJTAG下载器(集成USB转串口)84184详情3摄像头模块OV76201201120详情4偏振片15115详情5摄像头安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7MMA7361加速度传感器模块(三轴)21121详情8ENC-03MB陀螺仪模块(双轴)75175详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM1117-3.3电源芯片428详情12LM1117-3.3元件包0.320.6详情13LM2940电源芯片428详情14LM2940元件包0.320.6详情15200线编码器(双相)147.251147.25详情16编码器支架12112详情17编码器齿轮(D车)15.2115.2详情18OLED显示屏34.3134.3详情19第9届飞思卡尔竞赛指定D车模详情20第9届飞思卡尔竞赛指定E车模详情总计829.05元第九届飞思卡尔智能车竞赛摄像头组材料表(MCF52255)序号名称单价(元)数量总计(元)链接1MCF52255最小系统(32位)110.71110.7详情2BDM下载器84184详情3摄像头模块OV76201201120详情4偏振片15115详情5摄像头安装支架48148详情6碳素杆(10mm*8mm*500mm)12112详情7MMA7361加速度传感器模块(三轴)21121详情8ENC-03MB陀螺仪模块(双轴)75175详情9BTN7971电机驱动(4合1)1261126详情10BTN7971驱动芯片17.29469.16详情11LM1117-3.3电源芯片428详情12LM1117-3.3元件包0.320.6详情13LM2940电源芯片428详情14LM2940元件包0.320.6详情15200线编码器(双相)147.251147.25详情16编码器支架12112详情17编码器齿轮(D车)15.2115.2详情18OLED显示屏34.3134.3详情19第9届飞思卡尔竞赛指定D车模详情20第9届飞思卡尔竞赛指定E车模详情总计序号名称单价(元)数量总计(元)链接1MC9S12XS128最小系统(16位)78.75178.75详情2BDM下载器(集成USB转串口)52.5152.5详情310mH工字电感0.82016详情4 6.8nf电容0.2204详情5LM386运算放大器3412详情6NE5532运算放大器 3.5414详情7干簧管 2.525详情80.3mm漆包线(50米长)15115详情9碳素杆(5cm*3cm*1000mm)10.8110.8详情10碳素杆(6cm*4cm*1000mm)12224详情11碳素杆三通件(垂直) 4.829.6详情12碳素杆三通件(倾斜) 4.829.6详情13舵机支架40140详情14舵机转向舵盘39.6139.6详情15BTN7971电机驱动(4合1)1261126详情16LM2940电源芯片428详情17LM2940元件包0.320.6详情18200线编码器(双相)149.582299.16详情19编码器支架12112详情20编码器齿轮(D车)15.2115.2详情21OLED显示屏34.3134.3详情22第9届飞思卡尔竞赛指定C车模详情总计序号名称单价(元)数量总计(元)链接1MK60DN512ZVLL10最小系统(32位)110.71110.7详情2OSJTAG下载器(集成USB转串口)84184详情310mH工字电感0.82016详情4 6.8nf电容0.2204详情5LM386运算放大器3412详情6NE5532运算放大器 3.5414详情7干簧管 2.525详情80.3mm漆包线(50米长)15115详情9碳素杆(5cm*3cm*1000mm)10.8110.8详情10碳素杆(6cm*4cm*1000mm)12224详情11碳素杆三通件(垂直) 4.829.6详情12碳素杆三通件(倾斜) 4.829.6详情13舵机支架40140详情14舵机转向舵盘39.6139.6详情15BTN7971电机驱动(4合1)1261126详情16BTN7971驱动芯片17.29469.16详情17LM1117-3.3电源芯片428详情18LM1117-3.3元件包0.320.6详情19LM2940电源芯片428详情20LM2940元件包0.320.6详情21200线编码器(双相)149.582299.16详情22编码器支架12112详情23编码器齿轮(D车)15.2115.2详情24OLED显示屏34.3134.3详情25第9届飞思卡尔竞赛指定C车模详情总计第九届飞思卡尔智能车竞赛电磁组材料表(MCF52255)序号名称单价(元)数量总计(元)链接1MCF52255最小系统(32位)110.71110.7详情2BDM下载器84184详情310mH工字电感0.82016详情4 6.8nf电容0.2204详情5LM386运算放大器3412详情6NE5532运算放大器 3.5414详情7干簧管 2.525详情80.3mm漆包线(50米长)15115详情9碳素杆(5cm*3cm*1000mm)10.8110.8详情10碳素杆(6cm*4cm*1000mm)12224详情11碳素杆三通件(垂直) 4.829.6详情12碳素杆三通件(倾斜) 4.829.6详情13舵机支架40140详情14舵机转向舵盘39.6139.6详情15BTN7971电机驱动(4合1)1261126详情16BTN7971驱动芯片17.29469.16详情17LM1117-3.3电源芯片428详情18LM1117-3.3元件包0.320.6详情19LM2940电源芯片428详情20LM2940元件包0.320.6详情21200线编码器(双相)149.582299.16详情22编码器支架12112详情23编码器齿轮(C车)15.2115.2详情24OLED显示屏34.3134.3详情25第9届飞思卡尔竞赛指定C车模详情总计。
飞思卡尔智能车大赛简介
飞思卡尔智能车大赛目录“飞思卡尔杯”智能车大赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCSl2单片机为核心的大学生课外科技竞赛。
组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,谁最快跑完全程而没有冲出跑道并且技术报告评分较高,谁就是获胜者。
其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。
全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
因而该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的比赛。
该竞赛以飞思卡尔半导体公司为协办方,自2006年首届举办以来,成功举办了五届,得到了教育部吴启迪副部长、张尧学司长及理工处领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区200余所高校广泛参与的全国大学生智能汽车竞赛。
2008年第三届被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一(教高函[2007]30号文,附件2),2009年第四届被邀申请列入国家教学质量与教学改革工程资助项目。
参赛选手须使用竞赛秘书处统一指定并负责采购竞赛车模,采用飞思卡尔16位微控制器MC9S12DG128作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍之名次(成绩)由赛车现场成功完成赛道比赛时间为主,技术方案及制作工程质量评分为辅来决定。
第四届全国大学生“飞思卡尔”杯比赛规则和赛场纪律
附件二: 附件二:电路器件及控制驱动电路限制
每台模型车的电路板中只允许使用一种型号微控制器. 8位微控制器最多可以使用2片,16位微控制器限制使用 1片;不得同时使用8位和16位微控制器; 除了上述规定的微控制器之外不得使用辅助处理器以及 其它可编程器件; 伺服电机数量不超过 3个; 传感器数量不超过16个(红外传感器接受单元计为1个传 感器,发射单元不计算,CCD传感器记为1个传感器); 直流电源使用大赛指定的电池; 禁止使用DC-DC升压电路直接为驱动电机以及舵机提供 动力; 全部电容容量和不得超过2000微法;电容最高充电电压 不得超过25伏.
赛道有一个长为1米的出发区,如下图所 示,计时起始点两边分别有一个长度10厘 米黑色计时起始线,赛车前端通过起始线 作为比赛计时开始或者结束时刻.
分赛区, 分赛区,决赛区比赛规则
分赛区和决赛区的比赛规则相同,都具有 光电组和摄像头组比赛.两个赛题组比赛 在同一个赛场先后进行,所遵循的比赛规 则是相同的.两个赛题组分别独立进行成 绩排名. 分赛区和总决赛的现场比赛均包括初赛与 决赛两个阶段.下面列出的现场预赛,决 赛阶段的比赛规则适用于各分赛区及总决 赛区的两个赛题组.
可以选择参数:
– 开发软件可以选择CodeWarrior调试软件,也可以另行选择; – 开发调试硬件可以选择秘书处统一推荐的 BDM工具,也可以另行 选择; – 电路所使用元器件(传感器,各种信号调理芯片,接口芯片,功 率器件等)种类与数量都可以自行设计选择.
谢谢
�
1.初赛与决赛规则 .
1) 初赛阶段规则
– – – 比赛场中有两个相同的赛道. 参赛队根据比赛题目分为两组,并以抽签形式决定组内 比赛次序. 比赛分为两轮,两组同时在两个赛道上进行比赛,每支 参赛队伍可以在第二轮比赛之前有20分钟的现场调整时 间,在此期间,参赛队伍只允许对赛车的硬件(不包括 微控制器芯片)进行调整.第二轮比赛时两组交换场地, 比赛顺序和第一轮比赛相同. 在每轮比赛中,选手首先将赛车放置在起跑区域内赛道 上,赛车静止两秒钟后自动启动. 每辆赛车在赛道上跑一圈,以计时起始线为计时点,跑 完一圈后赛车需要自动在起始线之后三米的赛道内,如 果没有停止在规定的范围内,比赛成绩时间增加1秒. 每辆赛车以在两个单轮成绩中的较好成绩为赛车最终初 赛成绩;计时由电子计时器完成并实时显示.
飞思卡尔智能车光电资料

飞思卡尔智能车光电资料康世胤1,李长城2,莫一林3,保全全4,陆耿5(1. 清华大学自动化系,北京 100084;2. 清华大学自动化系,北京 100084;3. 清华大学自动化系,北京 100084;4. 清华大学自动化系,北京 100084;5. 清华大学自动化系,北京 100084)摘要: 第一届〝飞思卡尔〞杯全国大先生智能车约请赛要求对高速行驶的小车停止实时控制,使其巡线完成竞赛赛道。
针对这种要求,我们选择了最成熟的PID控制,尝试了由团圆的不完全微分的PD控制到相对延续PD控制的过渡,经过采集光耦传感器输入的模拟量,采用对称求位置法失掉延续性较好的位置信息,应用双排传感器计算角度,对位置和角度同时停止PD控制,经过细致调试确定相应参数,并合理应用分段、设置死区等方法,最终小车可以取得较好的动摇性和在高速状况对赛道中心线的跟随特性。
关键词:路途寻迹;PID控制;对称定位;团圆;延续Control Method Based on Photoelectric Coupling Device – fromDiscrete Signal to Continual SignalKANG Shiyin1,LI Changcheng2,MO Yilin3,GU Quanquan4,LUGeng5(1. Automation, Tsinghua University, Beijing 100084, China;2. Automation, Tsinghua University, Beijing 100084, China;3. Automation, Tsinghua University, Beijing 100084, China;4. Automation, Tsinghua University, Beijing 100084, China;5. Automation, Tsinghua University, Beijing 100084, China;)Abstract: In the coming FREESCALE College Student Smart Car Competition ’06, real time control strategies are required to be applied in the high-speed model car which to make sure the car tracking the unknown road and finishing 2 laps of game. Based on the requirement we select one of the most well applied proportion-integration-deviation (PID) method. Much works are carried out including trying varies of strategy from initial discrete PD to final continual PD. In the current strategy analog output of photoelectric coupling devices are sampled and converted from A to D. Symmetric positioning method is applied to obtain precise direction information. Furthermore by applying dual sensor array the turning angle is calculated. PD method is applied on location and angle. After careful modification the corresponding parameters are decided empirically. In addition by using some other methods such as track segmentation and dead area presetting, the model car can obtain better status including good stability and fine tracking character in high speed.Key words:Road Tracking, Proportion-Integration-Deviation Control, Symmetric Positioning, Discrete, Continual第一届〝飞思卡尔〞杯全国大先生智能车约请赛的赛题是控制竞赛小车,使其按要求用尽能够短的时间完成竞赛赛道,竞赛允许选手自行设计传感器和控制电路,并编写控制顺序,制止改动舵机和轮胎等小车结构。
飞思卡尔杯全国大学生智能汽车竞赛技术报告_摄像头组
第十届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:电子科技大学摘要本文设计的智能车系统以MK60DN512ZVLQ10微控制器为核心控制单元,通过CMOS摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值化,提取黑色引导线,用于赛道识别;通过编码器检测模型车的实时速度,使用PID控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
关键字:MK60DN512ZVLQ10,CMOS,PIDAbstractIn this paper we will design a smart car system based on MK60DN512ZVLQ10as the micro-controller unit. We use a CMOS image sensor to obtain lane image information. Then convert the original image into the binary image by the analog comparator circuit in order to extract black guide line for track identification. An inferred sensor is used to measure the car`s moving speed. We use PID control method to adjust the rotate speed of driving electromotor and direction of steering electromotor, to achieve the closed-loop control for the speed and direction.Keywords: MK60DN512ZVLQ10,CMOS,PID目录摘要 (II)Abstract (III)目录............................................................................................................................ I V 引言.. (1)第一章系统总体设计 (2)1.1系统概述 (2)1.2整车布局 (3)第二章机械系统设计及实现 (4)2.1智能车机械参数调节 (4)2.1.1 前轮调整 (4)2.1.2其他部分调整 (6)2.2底盘高度的调整 (7)2.3编码器的安装 (7)2.4舵机转向结构的调整 (8)2.5摄像头的安装 (9)第三章硬件系统设计及实现 (11)3.1 MK60DN512ZVLL10主控模块 (12)3.2电源管理模块 (12)3.3 摄像头模块 (14)3.4电机驱动模块 (15)3.5测速模块 (16)3.6陀螺仪模块 (16)3.7灯塔检测模块 (16)3.8辅助调试模块 (17)第四章软件系统设计及实现 (19)4.1赛道中心线提取及优化处理 (19)4.1.1原始图像的特点 (19)4.1.2赛道边沿提取 (20)4.1.3推算中心 (21)4.1.4路径选择 (23)4.2 PID 控制算法介绍 (23)4.2.1位置式PID (24)4.2.2增量式PID (25)4.2.3 PID参数整定 (25)4.3转向舵机的PID控制算法 (25)4.4驱动电机的PID控制算法 (26)第五章系统开发及调试工具 (27)5.1开发工具 (27)5.2上位机图像调试 (27)5.3SD卡模块 (27)5.3.1SD卡介绍 (27)5.3.2 SPI总线介绍 (28)5.3.3软件实现 (28)第六章模型车的主要技术参数 (30)结论 (31)参考文献 (I)附录A:电原理图 (II)附录B:程序源代码................................................................................................... I V引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
第三届全国大学生“飞思卡尔”杯智能汽车竞赛
百度文库-东北师范大学
2009年第四届全国大学生“飞思卡尔”杯智能汽车竞赛
获奖名单
一、组织贡献奖
全国总决赛承办学校北京科技大学
东北赛区承办学校吉林大学
华北赛区承办学校北京科技大学
华东赛区承办学校杭州电子科技大学
华南赛区承办学校华南理工大学
西部赛区承办学校西北工业大学
二、优秀论文奖(共26篇)
北京科技大学北京科技大学CCD2队北京科技大学天津学院雷霆二队
北京科技大学中冶一队
清华大学三角洲队光电队
天津工业大学天津工业大学一队
长安大学长大二队
电子科技大学成电飞扬
西安交通大学绝尘队
西北工业大学翱翔队
西北师范大学瞬之队
华中科技大学华中科技大学一队
武汉科技大学首安四队
中南民族大学AE86队
湖北汽车工业学院惠捷二号
华南理工大学疾速队
东北大学龙腾队
东北大学猎豹
东北师范大学东师电子一队
吉林大学爱德队
东北大学秦皇岛分校东秦3队
杭州电子科技大学钱江1号
上海交通大学SmartStar
同济大学Raceking
南京师范大学先驱者
安徽大学风行者
杭电科技大信息工程学院超越者队
六、优秀奖(共15支队伍)
七、创意组。
飞思卡尔全国大学生智能车竞赛创意竞赛-山东大学
第四届“飞思卡尔”杯全国大学生智能汽车竞赛一、创意比赛作品简介:(内容包括作品的主要内容、创新点、主要技术指标以及现在完成程度等。
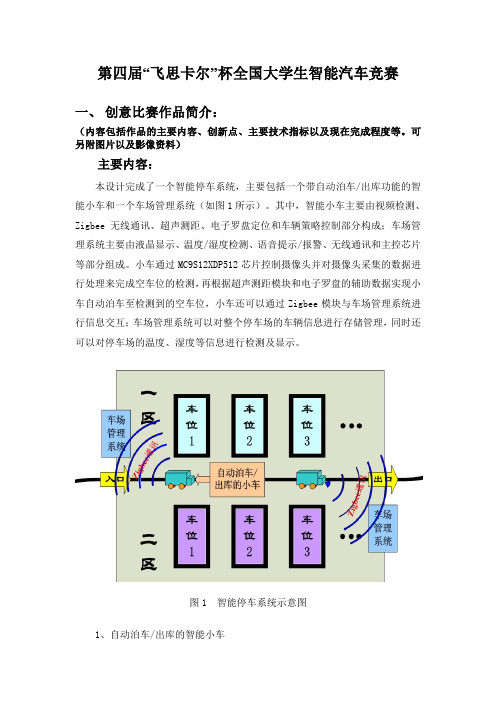
可另附图片以及影像资料)主要内容:本设计完成了一个智能停车系统,主要包括一个带自动泊车/出库功能的智能小车和一个车场管理系统(如图1所示)。
其中,智能小车主要由视频检测、Zigbee无线通讯、超声测距、电子罗盘定位和车辆策略控制部分构成;车场管理系统主要由液晶显示、温度/湿度检测、语音提示/报警、无线通讯和主控芯片等部分组成。
小车通过MC9S12XDP512芯片控制摄像头并对摄像头采集的数据进行处理来完成空车位的检测,再根据超声测距模块和电子罗盘的辅助数据实现小车自动泊车至检测到的空车位,小车还可以通过Zigbee模块与车场管理系统进行信息交互;车场管理系统可以对整个停车场的车辆信息进行存储管理,同时还可以对停车场的温度、湿度等信息进行检测及显示。
图1 智能停车系统示意图1、自动泊车/出库的智能小车小车自动泊车/出库的功能如图1所示。
当需要泊车时,小车在停车场入口通过Zigbee无线通讯模块与车场管理系统进行信息交互。
小车将自身的信息(车辆ID等)发送到车场管理系统,车场管理系统将停车场信息返回给小车,告知小车是否可以停车。
若有空车位小车会自动进入停车场,并通过摄像头检测空车位。
当小车通过摄像头检测某个空车位后,主控制器(MC9S12XDP512)会根据摄像头检测到的位置信息控制摄像头转动相应角度,并辅以超声测距传感器及电子罗盘装置精确完成泊车入位功能。
小车完成停车入位功能后会再一次将自身信息(车辆ID、停车位置、停车入位时间等)发送到车场管理系统,然后主控芯片关闭摄像头等模块并进入休眠状态。
当需要小车出库时,只需要在停车场出口位置通过车场管理系统输入对应车辆ID,然后车场管理系统会通过Zigbee模块与相应车辆进行通讯。
小车在接到出库信息后,唤醒主控芯片MC9S12XDP512,启动摄像头等各部分功能。
第七届全国大学生飞思卡尔杯智能汽车竞赛

第七届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分(省)赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定,参加全国总决赛的队伍同时必须提交车膜技术报告。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过感应由赛道中心电线产生的交变磁场进行路经检测的属于电磁组;车模通过采集赛道图像(一维、二维)或者连续扫描赛道反射点的方式进行进行路经检测的属于摄像头组;车模通过采集赛道上少数孤立点反射亮度进行路经检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分(省)赛区预赛以及全国总决赛,在实际可操作性基础上力求公正与公平。
一、器材限制规定1. 须采用统一指定的车模。
本届比赛指定采用三种车模,分别用于三个赛题组:编号车模外观和规格赛题组供应厂商A型车模车模:G768电机:RS380-ST/3545,摄像头组东莞市博思电子数码科技有限公司舵机:FUTABA3010 B型车模车模型号电机:540,伺服器:S-D6光电组北京科宇通博科技有限公司C型车模车模型号:N286电机:RN260-CN 38-18130伺服器:FUTABA3010电磁组东莞市博思电子数码科技有限公司各赛题组车模运行规则:a)光电组,摄像头组:车模正常运行。
车模使用A型车模(摄像头组)、B型车模(光电组)。
车模运行方向为,转向轮在前,动力轮在后。
如图1所示:图1 光电组车模运行方向说b)电磁组:车模直立行走。
使用C型车模。
车模运行时只允许动力轮着地,车模直立行走。
如图2所示:图2 电磁组车模运行状态注:原车模的前轮(转向轮)、舵机实际上没有用了,可以去掉。
(完整版)智能小车竞赛
智能小车竞赛一、全国飞思卡尔智能车比赛简介飞思卡尔智能汽车竞赛是以飞思卡尔半导体公司为协办方,得到了教育部相关领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区近300所高校广泛参与的全国大学生智能汽车竞赛。
2008年起被教育部批准列入国家教学质量与教学改革工程资助项目中科技人文竞赛之一。
该竞赛由竞赛秘书处为各参赛队提供/购置规定范围内的标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。
该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。
该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,保证竞赛向健康、普及,持续的方向发展。
全国大学生智能汽车竞赛原则上由全国有自动化专业的高等学校(包括港、澳地区的高校)参赛。
竞赛首先在各个分赛区进行报名、预赛,各分赛区的优胜队将参加全国总决赛。
每届比赛根据参赛队伍和队员情况,分别设立光电组、摄像头组、创意组等多个赛题组别。
每个学校可以根据竞赛规则选报不同组别的参赛队伍。
全国大学生智能汽车竞赛一般在每年的10月份公布次年竞赛的题目和组织方式,并开始接受报名,次年的3月份进行相关技术培训,7月份进行分赛区竞赛,8月份进行全国总决赛。
二、全国飞思卡尔智能车比赛情况历届概览首届飞思卡尔智能汽车大赛,于2006年8月20-21日在清华大学综合体育馆举办。
来自全国包括香港共59所大学的115支参赛队伍聚清华,一决胜负。
来自各校参赛队伍中不乏有表现十分优秀的队伍,但由于大部分参赛学校是第一次参加比赛,难免经验不足,所以在场上表现不尽如人意。
比赛最终由清华大学等优秀代表队获得一等奖。
到第二届飞思卡尔智能汽车大赛时,比赛已经逐渐开始形成规模,全国一共分为了五大赛区,同时进行比赛,在每个赛区取一定比例的优秀队伍到北京参加总决赛。
(完整word版)飞思卡尔智能车技术报告
集成化的设计思路的好处是原件密度高,系统可以小型化一体化,通过综合考虑各方面因素,在确定了系统最终硬件方案不做大的更改的情况下,在确保了系统可靠性的前提下,最终选择了一体化,集成化的硬件设计思路。使车体硬件电路布局紧凑,稳定可靠。
3、大前瞻,高分辨率方案。
在光电传感器的安装不影响赛车行驶的前提下,尽可能的提高传感器前瞻,更大的前瞻,能为赛车提供更多的信息,更能让赛车提前作出决策。
3.5.2主销内倾角
主销内倾角是指主销在汽车的横向平面内向倾斜一个角度,即主销轴线与地面垂直线在汽车横向断面内的夹角。主销内倾角也有使车轮自动回正的作用。通常汽车主销内倾角不大于80。
2.5.3前轮外倾角
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角称为“前轮外倾角”。轮胎呈现“八”字形张开时称为“负外倾”,而呈现“V”字形张开时称为“正外倾”。一般前轮外倾角为10左右。
4.5速度检测模块
为了使车在跑的过程中能快速加速,及时减速除了要有好的算法来控制,还依赖于速度闭环返回的速度脉冲值的可靠度和精确度,因此为了提高检测精度,最后选用了精度较高的光电编码器,光电编码器使用5V-24V电源,输出12.5%-85%VCC的方波信号。
9.2存在的不足
9.3可改进的方法
第十章参考文献
第一章引言
1.1方案介绍
系统硬件设计可以说是整个智能车设计的基础和重中之重。正确的硬件设计方向与思路,是系统稳定可靠的基础,功能强大的硬件系统,更为软件系统的发挥提供了强大的平台。、
1、整车低重心设计。
通过以往几届比赛的经验我们看到,往往重心低,体积小巧,布局紧凑的赛车更能取得好的成绩。、于是,我们通过合理布局电路板和各种传感器,尽可能地降低整车重心。在不影响传感器前瞻,或者不过度牺牲传感器性能的情况下,尽量降低光电传感器的高度,以提高赛车的侧翻极限。
飞思卡尔智能车竞赛设计方案

飞思卡尔智能车竞赛设计方案清晨的阳光透过窗帘,洒在书桌上那厚厚一摞方案草稿上。
我泡了杯咖啡,打开电脑,准备着手写这个“飞思卡尔智能车竞赛设计方案”。
10年的方案写作经验告诉我,这是一个充满挑战的任务,但也是展示自己才华的舞台。
一、项目背景飞思卡尔智能车竞赛是一场针对大学生的科技竞赛,旨在培养创新精神和实践能力。
参赛队伍需要设计一款智能车,通过传感器、控制器、执行器等部件,使车辆在规定的赛道上自主行驶,完成各种任务。
这场比赛既考验技术,也考验团队协作。
二、设计方案1.车辆整体设计车辆整体设计要兼顾美观、实用和稳定性。
外观上,我们采用流线型设计,减少空气阻力;内部结构紧凑,降低重心,提高稳定性。
车辆尺寸符合比赛规定,确保在赛道上行驶自如。
2.传感器配置(1)激光雷达:用于实时获取车辆周围环境信息,绘制三维地图。
(2)摄像头:用于识别赛道标志、障碍物等。
(3)超声波传感器:用于检测前方障碍物距离,避免碰撞。
(4)红外传感器:用于检测赛道边缘,防止车辆出轨。
3.控制器设计(1)路径规划:根据传感器信息,实时规划车辆行驶路径。
(2)速度控制:根据赛道状况,调整车速,确保稳定行驶。
(3)避障策略:当检测到前方有障碍物时,及时调整行驶方向。
4.执行器设计(1)电机驱动:驱动车辆前进、后退、转向。
(2)舵机:用于调整摄像头角度,获取更多赛道信息。
(3)电磁阀:用于控制车辆制动。
三、团队协作一个优秀的团队是项目成功的关键。
我们团队成员各司其职,密切配合:1.项目经理:负责整体进度把控,协调各方资源。
2.硬件工程师:负责车辆整体设计和传感器、执行器选型。
3.软件工程师:负责控制器设计和程序编写。
4.测试工程师:负责车辆调试和性能测试。
四、项目实施1.初期准备:收集比赛相关信息,了解赛道状况,确定设计方案。
2.设计阶段:根据设计方案,绘制图纸,选型采购。
3.制作阶段:组装车辆,调试传感器、控制器和执行器。
4.测试阶段:进行多次试验,优化控制策略,提高车辆性能。
全国大学生“飞思卡尔杯”智能车竞赛
全国大学生“飞思卡尔杯”智能车竞赛(郑新旺老师提供)(一)项目简介为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托,由教育部高等学校自动化专业教学指导分委员会主办全国大学生智能汽车竞赛。
该竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一项具有探索性工程的实践活动,是教育部倡导的大学生科技竞赛之一。
该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
全国大学生“飞思卡尔”杯智能汽车竞赛由竞赛秘书处设计、规范标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。
该竞赛融科学性、趣味性和观赏性为一体,是以发展迅猛、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。
该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,力求向健康、普及、持续的方向发展。
全国大学生智能汽车竞赛原则上由全国设有自动化专业的高等学校(包括港、澳地区的高校)参赛。
竞赛首先在各个分赛区进行报名、预赛,各分赛区的优胜队将参加全国总决赛。
每届比赛根据参赛队伍和队员情况,分别设立光电组、摄像头组、电磁组、创意组等多个赛题组别。
每个学校可以根据竞赛规则选报不同组别的参赛队伍。
全国大学生智能汽车竞赛组织运行模式贯彻“政府倡导、专家主办、学生主体、社会参与”的16字方针,充分调动各方面参与的积极性。
诚毅学院每年9月组织选拔和培训,经过近一年的准备后,次年7月份参加比赛。
诚毅学院智能车队自2012年组建以来,2012年获得华南赛区三等奖三项,2013年获得华南赛区三等奖五项,2014年获得华南赛区二等奖五项、三等奖一项,成绩逐年提高。
全国大学生飞思卡尔杯智能汽车竞赛
上海理工大学首届“飞思杯”智能车制作大赛细节红外循迹:一、器材规定:该组比赛中赛方提供STC89C52系统板和MC9S12XS128系统板作为赛车的核心控制单元。
参赛队伍可以从中选取适合自己的芯片来完成比赛,但是使用STC89C52系统板,最终成绩不加分;使用MC9S12XS128系统板,最终成绩加5分。
如果车模中禁止改动的部件发生损坏,需要使用相同型号的部件替换。
红外循迹赛车安装完毕后,车模尺寸不能超过:250mm宽和400mm长。
二、赛道基本参数见附件三;三、裁判及技术评判员将由上海理工大学飞思卡尔智能车赛队担任。
四、比赛规则:1.比赛过程规则i.比赛赛道实际布局将在比赛当日揭示,同时在赛场内将安排采用与制作实际赛道相同的材料所做的测试赛道供参赛队进行现场调试。
ii.每支队伍的比赛顺序将有电脑随机排列。
iii.每支参赛队伍可以在每轮比赛之前有10分钟的现场调整时间。
在此期间,参赛队伍只允许对赛车的硬件(不包括微控制器芯片)进行调整。
iv. 比赛时,赛车必须放在起跑线后方1米之内,让车在出发区静止2秒以上后自行启动,否则扣5分。
v. 每辆赛车按规则在赛道上跑一圈,以计时起始线为计时点,跑完一圈后赛车需要自动停止在起始线之后三米之内的赛道内,如果没有停止在规定的区域内,赛事成绩减去5分。
赛车在比赛途中,可以允许小车最多同时两个轮子不在赛道上,三个或三个以上轮子同时不在赛道上时算冲出跑道。
vi. 每个参赛队伍有三次机会,三次机会中取最好的一次成绩作为最终的赛事成绩。
参赛队伍的赛车需要在赛方指定的赛道上跑完一圈,求出此次赛车的平均速度,然后平均速度乘以100作为赛事的成绩。
成绩将显示在大屏幕上。
vii. 跑完整个赛道的队伍,比赛后,带着自己的赛车到答辩处进行答辩。
三次机会均未能跑完整个赛道的队伍不进行答辩。
viii. 在答辩期间,技术评判组将对赛车进行现场技术检查,如有违反器材限制规定的立即取消大赛成绩。
最新全国大学生 飞思卡尔 杯 智能汽车竞赛 2
全国大学生飞思卡尔杯智能汽车竞赛2全国大学生飞思卡尔杯智能汽车竞赛 2全国大学生"飞思卡尔"杯智能汽车竞赛(2)2010-07-15 16:28第四章赛车硬件系统的设计与实现图4.3 LM1881信号连接原理图视频信号通过引脚2(composite video input)输入LM1881,。
引脚1为行同步信号输出端(composite sync output)。
引脚3为场同步信号输出端(vertical sync output),当摄像头信号的场同步脉冲到来时,该端将变为低电平,一般维持230us,然后重新变回高电平。
引脚7为奇-偶场同步信号输出端(odd/even output),当摄像头信号处于奇场时,该端为高电平,当处于偶场时,为低电平。
奇-偶场的交替处与场同步信号的下降沿同步,也就是和场同步脉冲后的上升沿同步。
事实上,我们不仅可以用场同步信号作为换场的标志,也可以用奇-偶场间的交替作为换场的标志。
图4.4 LM1881信号时序图21第二届全国大学生智能汽车邀请赛技术报告图4.5视频采集电路图如图4.5所示,摄像头视频信号输入LM1881的视频信号输入端,同时送入S12的一个AD口(我们选用PAD00)。
LM1881的行同步信号端(引脚1)接入S12上的PT0口,PT0是一个带中断的I/O口,这样做的好处是不需要使用等待查询的方式来检测行同步信号,节省CPU资源。
LM1881的奇-偶场同步信号输出端接S12的普通I/O口PS2。
在此,我们选择奇-偶场同步信号来作为换场的标志信号,而不是选用LM1881引脚3输出的场同步信号。
这样做的好处是,当摄像头信号处于奇场或偶场时,则奇-偶场信号整场都相应地处于高电平或低电平,只要用个普通I/O口,若检测到该信号发生变化,就可以知道摄像头信号换场了。
因为每场信号持续的时间相对较长,所以也不用担心漏检到换场的发生。
接奇-偶场同步信号时,用中断的方式来判断换场的发生同样是很方便的。
智能车大赛技术报告(最终版)
目录第一章引言 (1)第二章智能小车设计分析 (2)2.1设计要求 (2)2.2总体设计 (2)2.3 方案论证 (3)2.3.1 传感器设计方案 (3)2.3.2 控制算法设计方案 (4)第三章智能小车硬件设计 (5)3.1机械设计 (5)3.1.1 车模结构特点 (5)3.1.2 寻迹传感器布局 (5)3.1.3 系统电路板的固定及连接 (7)3.2电路设计 (7)3.2.1传感器电路设计 (7)3.2.2测速传感器的设计 (8)3.2.3 电源管理模块 (9)3.2.4驱动模块 (10)3.2.5 调试模块 (11)第四章智能小车软件设计 (12)4.1 总体流程图 (12)4.2 PID控制算法 (13)4.3舵机方向控制算法 (14)4.4 速度控制算法 (14)第五章开发流程 (16)5.1单片机资源划分 (16)5.2编译环境 (16)5.3下载调试 (16)第六章开发总结与心得 (17)6.1 开发与调试过程 (17)6.2 开发中遇到的几个典型问题 (18)6.2.1电源管理问题 (18)6.2.2 PID微分误差的问题 (19)6.2.3 电机电磁干扰的问题 (20)6.3 总结与展望 (20)参考文献 (22)附录A:研究论文 (I)附录B:程序清单 (XVII)附录C:红外传感器参数说明 .................................................................................... X XXVI 附录D:配件清单 .. (XXXVII)II第一章引言智能小车以飞思卡尔16位微控制MC9S12DG128B为控制器,采用多传感器进行信息采集,运用反射式红外传感器设计路径检测模块和速度监测模块。
同时,采用PWM技术,控制舵机的转向和电机转速。
系统还扩展了LCD(Liquid Crystal Display:液晶显示屏)和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。
飞思卡尔智能车竞赛共94页文档

飞思卡尔智能车竞赛
6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
谢谢!