RoboCup标准组机器人队员识别仿真
robocup仿真组球队设计思路
robocup仿真组球队设计思路环境配置好了,接下来就可以研究一下Agent程序的开发了。
这篇短文原本是2004年我们的参赛方案里面的内容节选,虽然有点老,但是我觉得内容仍然很适合入门的时候看一看,对于初学者而言完全没有过时。
1. RoboCup 仿真比赛介绍随着计算机技术的发展,分布式人工智能中多智能体系统(MAS:Multi-agent System) 的理论及应用研究已经成为人工智能研究的热点RoboCup则是人工智能和机器人技术的一个集中体现,被认为是继深蓝战胜人类国际象棋冠军卡斯帕洛夫后的又一里程碑式挑战,目标是到2050 年完全类人的机器人足球队能够战胜当时的人类足球冠军队伍。
RoboCup 包括多种比赛方式,主要分为软件仿真比赛和实物系列的机器人足球比赛。
由于软件仿真比赛无需考虑实际的硬件复杂,避免硬件实现的不足,可以集中于研究多智能体合作与对抗问题,因此,目前参加仿真组比赛的队伍数目最多。
RoboCup 仿真比赛提供了一个完全分布式控制、实时异步多智能体的环境,通过这个平台,测试各种理论、算法和Agent 体系结构,在实时异步、与声的对抗环境下,研究多智能体间的合作和对抗问题。
仿真比赛在一个标准的计算机环境内进行,采用Client/Server 方式,由RoboCup 联合会提供Server 系统rcsoccersim(版本8 之前名为soccerserver),参赛队编写各自的客户端程序,模拟实际足球队员进行比赛。
Rcsoccersim 通过提供一个虚拟场地,对比赛全部球员和足球的移动进行仿真,以离散的方式控制比赛的进程。
仿真模型引入了真实世界的很多复杂特,诸如物体移动的随机、感知信息和执行机构的不确定、个人能力的物理有限以及通讯量的受限。
Client 程序则表现为多个Agent(球员)为了共同的赢球目标进行多智能体间的合作规划,因此,我们需要进行以下设计:多线程的程序结构,client 和server 间的同步策略,根据有限信息重构足球场上所有对象图景,Agent 的底层动作设计,Agent 的高层决策智能算法。
RoboCup仿真组(3D)比赛规则

2013中国机器人大赛暨RoboCup公开赛RoboCup机器人足球仿真组(3D)比赛规则这篇文档介绍2013年中国机器人大赛暨RoboCup公开赛机器人足球仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性。
技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或者建议可以向技术委员会反馈,技术委员会保留最终决定权。
技术委员会联系方式:邮箱地址kian.hsueh@。
1.比赛赛程安排1.1注册阶段所有参赛球队都需要注册,请将以下信息发送至技术委员会邮箱:●球队名称;●国家;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档;●球队可执行码;注册截止日期是2013年9月15日。
请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
1.2预选赛阶段本次比赛将设立预选阶段。
2012中国机器人大赛暨RoboCup中国公开赛仿真组(3D)比赛的四强(南京邮电大学,东南大学,常州工学院,河海大学)直接进入现场比赛阶段,其他所有球队必须参加预选阶段的审核。
预选阶段需要提交如下两份材料:●球队描述文档:文档中须介绍球队的底层框架,以及在球队方面所做的主要工作。
●球队可执行码:可执行码以11VS11进行对战,需包含start.sh和kill.sh脚本以及所依赖的所有库文件。
请在64位ubuntu系统下编译可执行码后再提交。
请所有需要进行预选阶段的球队将所需材料打包,命名为“球队名.tar.gz”,发送到技术委员会邮箱,截止日期是2013年9月25日,注册阶段已经发送过的队伍,可以不用重复发送。
技术委员会将对所有报名球队的材料进行审核,如果审核通过,技术委员会会尽快回复一封确认邮件。
只有审核通过的球队才能获得本次比赛的参赛资格。
1.3现场比赛阶段TBA2.比赛日程安排TBA3.机器配置和软件环境3.1ServerTBA3.2ClientTBA3.3Software操作系统:Ubuntu 12.10(64bit)依赖库:ODE 0.11.1 + TBB patch, Ruby >= 1.9.3p194仿真环境:simspark 0.2.4, rcssserver3d 0.6.74.获胜规则4.1循环赛阶段循环赛阶段,小组内每两支队伍之间都要进行一场比赛。
RoboCup小型机器人仿真系统
收稿日期:2005-01-24 第23卷 第4期计 算 机 仿 真2006年4月 文章编号:1006-9348(2006)04-0128-04RoboCup 小型机器人仿真系统孙鹏,陈小平(中国科学技术大学计算机科学与技术系,安徽合肥230027)摘要:通过对机器人硬件进行仿真,可以有效地提高控制软件的开发效率,并降低硬件的损耗。
该文实现了一个RoboCup 小型机器人仿真系统,该系统的仿真对象是机器人足球比赛中的所有硬件要素,包括机器人的运动学特性、击球和带球装置、视觉系统的噪声和盲区、以及无线通讯系统的延迟等。
该文还分析了真实系统中各仿真对象的物理特性及其实现难点,给出了仿真系统的软件架构和接口定义,描述了各仿真功能的具体实现。
通过分析仿真结果表明此系统达到了比较理想的效果,可以为其它相似系统提供有益的参考。
关键词:计算机仿真;多机器人系统;机器人足球中图分类号:TP242 文献标识码:ARoboCup Sma ll S i ze Robot S i m ul a ti on SystemS UN Peng,CHEN Xiao -Ping(Dep t .Computer Sci .&Tech .,University of Sci .&Tech .of China,Hefei Anhui,230027,China )ABSTRACT:A si m ulati on syste m of r obot hard ware can s peed up the devel opment of contr ol s oft w are and reduce hard ware l oss .This paper p resents a si m ulati on syste m of RoboCup s mall size r obot .It is designed t o si m ulate allhard ware parts of the game,such as dyna m ic model of the r obot,kicking and dribbling device,noise and blind area of the visi on syste m,and latency of the wireless syste m,etc .This paper als o discusses the physical feature of each real part,s oft w are architecture,interface definiti on and i m p le mentati on of each functi on .Result shows that it has very good perf or mance and can offer reference for other si m ilar syste m s .KE YWO R D S:Computer si m ulati on;M ulti -r obot syste m;Robot s occer1 引言RoboCup [1]机器人足球是人工智能与自主机器人研究的一个新领域。
机器人比赛项目具体介绍
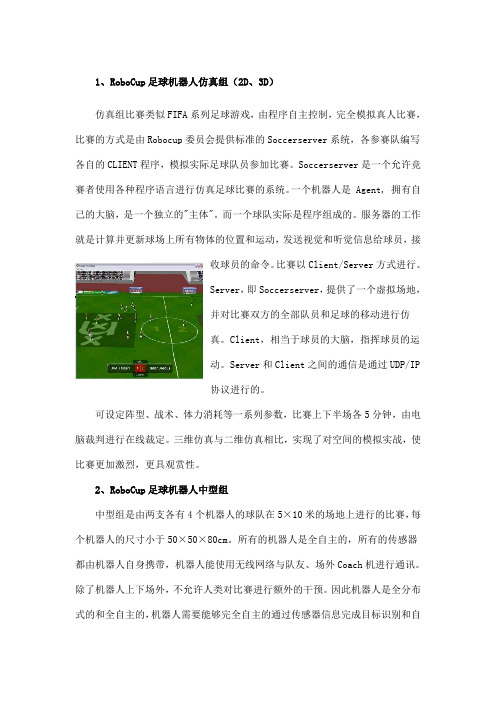
1、RoboCup足球机器人仿真组(2D、3D)仿真组比赛类似FIFA系列足球游戏,由程序自主控制,完全模拟真人比赛,比赛的方式是由Robocup委员会提供标准的Soccerserver系统,各参赛队编写各自的CLIENT程序,模拟实际足球队员参加比赛。
Soccerserver是一个允许竞赛者使用各种程序语言进行仿真足球比赛的系统。
一个机器人是 Agent, 拥有自己的大脑,是一个独立的"主体"。
而一个球队实际是程序组成的。
服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接收球员的命令。
比赛以Client/Server方式进行。
Server,即Soccerserver,提供了一个虚拟场地,并对比赛双方的全部队员和足球的移动进行仿真。
Client,相当于球员的大脑,指挥球员的运动。
Server和Client之间的通信是通过UDP/IP协议进行的。
可设定阵型、战术、体力消耗等一系列参数,比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
2、RoboCup足球机器人中型组中型组是由两支各有4个机器人的球队在5×10米的场地上进行的比赛,每个机器人的尺寸小于50×50×80cm。
所有的机器人是全自主的,所有的传感器都由机器人自身携带,机器人能使用无线网络与队友、场外Coach机进行通讯。
除了机器人上下场外,不允许人类对比赛进行额外的干预。
因此机器人是全分布式的和全自主的,机器人需要能够完全自主的通过传感器信息完成目标识别和自定位,决定自身采取的动作,控制电机和其它执行机构以完成比赛。
每场比赛分成两个15分钟的半场。
比赛过程由人类裁判控制,裁判具有绝对的权威贯彻比赛规则的执行。
同时有一个助理裁判负责操作裁判盒程序,根据主裁判的判罚发出相应的指令如比赛开始、暂停、开球、任意球等给比赛双方球队的场外Coach 机,场外Coach机再将指令通过无线网络发送给场上比赛的机器人。
机器人仿真模拟技术的说明书

机器人仿真模拟技术的说明书1. 简介机器人仿真模拟技术旨在通过计算机软件和硬件系统模拟和模仿机器人的行为和功能。
这项技术被广泛应用于各个领域,如工业制造、医疗保健、军事训练等。
本说明书将详细介绍机器人仿真模拟技术的原理、应用以及使用方法,以帮助用户更好地了解和应用该技术。
2. 技术原理机器人仿真模拟技术主要基于计算机图形学、虚拟现实和控制系统理论。
其基本原理如下:(1)建模:通过设计人工模型和环境模型,将真实世界的机器人和场景模拟为计算机系统能够处理的数据。
(2)动力学仿真:使用数学模型和物理模拟算法模拟机器人在虚拟环境中的运动和力学特性。
(3)控制算法:根据机器人的控制算法和行为规则,对仿真模型进行控制,实现机器人在虚拟环境中的各项功能和任务。
(4)感知模拟:通过传感器模拟技术,使机器人能够感知虚拟环境中的物体、形状、颜色等信息。
3. 应用领域机器人仿真模拟技术在以下领域得到广泛应用:(1)工业制造:通过模拟机器人在生产线上的动作和任务,提前优化生产过程,减少生产线停机时间,并提高产品质量和生产效率。
(2)医疗保健:通过仿真模拟手术机器人的操作以及机器人护理等任务,提高医护人员的培训效果,降低手术风险,改善医疗服务质量。
(3)军事训练:通过模拟战场环境和机器人的行为,训练士兵在战场上对机器人进行操作和应对,提高战斗力和应急反应能力。
(4)科研探索:通过仿真模拟机器人在极端环境下的行为,如太空探索、海底勘探等,探索更多未知领域,提前解决潜在问题。
4. 使用方法机器人仿真模拟技术的使用方法如下:(1)软件安装:根据实际需求选择合适的机器人仿真软件,并按照提供的安装指南进行安装。
(2)模型设计:根据机器人的外观和机构特点,使用软件提供的建模工具进行模型设计和编辑。
注意保持模型的准确性和细节。
(3)环境构建:理解机器人工作的实际环境,并使用软件提供的场景编辑工具构建虚拟环境,包括障碍物、光照等。
(4)控制编程:根据机器人的行为规则和任务需求,使用软件提供的控制编程工具进行编写和调试。
ROBOCUP小型组足球机器人视觉使用说明

注意:在运行本程序以前,请先用公司提供的demo为图像分配600页的存储空间。
具体操作如下:
1、打开所有对话框以后选定取场地、显示场地框,然后在显示区域按下鼠标左键选出场地。
2、点击按钮“读出一帧图像”,然后对目标物体进行采样。
3、用鼠标点击采集图像上的目标物体,信息在“采样信息”区显示出来。
人为判断该像素点信息是否能典型代表该目标物体,如果能,则点击“采样”按钮,每个物体采样点至少在2个以上,以便能精确辨识物体。
也不宜采得过多,使阈值范围过大,增加噪音,使之不能精确识别。
4、采样后,点击开始扫描,程序根据采样信息找出目标物体,如果在设置中选择捕捉框,怎程序在画面上
画出矩形框,如果有物体找不到或者找错了,则在设置中选中该物体,点击“清除目标采样”按钮清除当前目标物体的采样,然后再重新采样。
直至满足要求。
5、采样过程中,可选择保存采样结果,以便下次不再重复采样。
6、采样结果保存在sampling.txt文件中,可以人工修改阈值上下限。
7、每次扫描完成后,在设置里选中物体,点击“显示辨析结果”按钮,可以得到该物体的位置坐标。
注意事项:
我们只需要知道对方的位置就可以了,所以在程序中去掉了判断对方副色标的算法。
对话框显示的的图像是采集卡直接写到内存中的,并不是内存中当前的数据,当点击采集按钮以后,采集卡才向内存中写数据。
所以我们不能边显示边去扫描物体。
对现场的要求是:比赛现场光线充足,辨识物体无影,机器人小车和球的颜色、形状特征已知,比赛场地和各物体颜色饱和度高。
否则不能精确辨识。
使用该程序以前请先安装好大恒采集卡的驱动程序。
robocup2d仿真开发
z
要求完成以下任务: 从 Server 的源程序中找出定义端口协议的源程序,并简要说明。
(2)Server 与 Client 之间的通讯 在比赛的持续过程中,Server 无时无刻不在 Client 和场上队员之间传递消息。它就这 一方面的作用来说,有点像现实中空气那样,主要是作为一种介质。 Server 与 Client 之间通讯的消息是通过 6000 端口进行的,并且交互的是字符串,如:
2 Soccer Server 与 Client
一、实验目的:
掌握 RoboCup 仿真机器人足球(2D)Server 的工作原理以及与 Client 之间的交互方 式和内容,具体掌握的内容如下: (1).Server 的工作原理、Server 与 Client 之间的交互方式。 (2).Server 与 Client 通讯格式。 (3).Server 设计的运动模型(球和球员) 。 (4).Server 设计的球员感知模型。 (5).Server 设计的异构球员信息。 (6).解析 Server 配置文件。
167
Hale Waihona Puke z了解异构球员的大概使用方法及如何合理使用异构球员
(6)Server 配置文件: Server配置文件主要完成对Server的一些设置。 下面, 只对常用的几个功能进行描述。 ①设置半场时间。原始的Server默认半场时间是300周期,我们常将其改为3000。 可以将配置文件中的“half_time: 300”该为“half_time: 3000” ,这样上 下场比赛加起来就是6000周期,大概是十分钟左右。 ② 设置通讯端口。我们在用到训练器进行机器学习的时候需要手动设置训练器和 Client的通讯端口。默认端口是6000,6001,6002。 设置过程如下:将port: 6000改为port: 6900 将coach_port: 6001改为coach_port: 6901 将 olcoach_port: 6002 改为 olcoach_port: 6902 ③离线教练。我们的训练器相当一个离线教练,要将其与 Server 连接起来就需要 将#coach_w_referee 改为 coach_w_referee,取消阻止。 要求完成的任务: z 将半场时间设置为 6000,进行比赛。 z 对通讯端口和教练进行设置,学会上训练器。
RoboCup 仿真 2D
通过UDP/IP端口实现的。Se每rver个根据cl请ie求nt都是独立的进程,通过给
定s的er端ve口r 和server连接。C各lie自nt更根新据世信界息模反型馈
Client
一支球队可以有最…多(acd1e1fg个hijkclmlnieopnq)t(或者说是球员)。
请求信息反馈
Server简介
• 当球员和server连接上后,所有的信息都通过这个端口传递。球员 发送他们下一步要做的动作请求给server(如踢球kick,转身turn, dash等)。
• Server接收到这些消息后,执行请求,并相应的更新环境。 • 另外,server向所有的球员提供感知sensory信息(如:关于足球,
抗比赛。这些Agen两t者使关用心的不仅同仅是程通过序通语讯从言对进方获行取设的 计。
符合一定协议的字符串
决策请求
Client / server,所以对球队的开发编译没有任何限制。
唯一要求就是:球队的开发工具提供通过UDP/IP连接的
client/server支持。这是因为serv(Dearj3和75jh每a2h个4f2cif…li)ent之间的通讯都是
WorldModel世界模型的更新 通U过DPM/IPon通it信o(r来11显个进示程出)来
按照策略向server 发送命令来执行 各种基本的复杂 的动作等
从server获取各种感 官信息来更新球员 的一个世界模型来
辅助决策
相关链接
• 工大机器人主页: • 工大2D资料站:/2d/ • 新开始下载集锦:/2d/ForNew • 科大2D资料站:/2d/ • 相关软件更新: • /projects/sserver/files/
球门和其他球员的位置可视信息)。球员用于更新自身世界模型。
机器人足球队2D仿真高层策略概述

iii
5.2.1 实现原理.........................................................................................13 5.2.2 dribble 带球方法的实现................................................................13 5.2.3 interceptClose 断球方法的实现.....................................................15 5.2.4 directPass 传球方法的实现............................................................16 6 球员间配合的设计...............................................................................................17 6.1 配合的实现方法........................................................................................17 6.2 普通球员策略的设计................................................................................17 6.2.1 攻击型球员策略.............................................................................17 6.2.2 配合型球员策略.............................................................................19 6.3 守门员策略的设计....................................................................................20 6.3.1 守门员扑球策略.............................................................................20 6.3.2 守门员开球门球策略.....................................................................21 7 阵形的设计...........................................................................................................21 7.1 阵形设计的原理........................................................................................21 7.2 阵形在比赛中的应用................................................................................22 7.2.1 阵形的种类.....................................................................................22 7.2.2 阵形的转换.....................................................................................23 8 场上教练的设计...................................................................................................24 8.1 场上教练介绍............................................................................................24 8.2 简单的场上教练的设计............................................................................24 9 比赛测试结果分析与评估...................................................................................25
协作机器人技术的仿真和虚拟实验方法

协作机器人技术的仿真和虚拟实验方法协作机器人技术是目前工业自动化领域的研究热点之一。
它涉及到多个机器人之间的合作与协调,旨在实现人与机器人之间的高效协同工作。
为了确保协作机器人系统的性能和安全,仿真和虚拟实验是一种重要的方法。
本文将讨论协作机器人技术的仿真和虚拟实验方法。
首先,仿真是一种通过计算机模拟实际场景和操作来评估协作机器人系统的性能的方法。
在仿真中,可以模拟不同的环境条件、任务场景和机器人行为,以验证系统的可行性和有效性。
同时,仿真还可以模拟意外情况和故障,测试系统的稳定性和应对能力。
为了进行协作机器人系统的仿真,需要使用合适的仿真软件和仿真模型。
目前,常用的协作机器人仿真软件包括Robotics Toolbox for MATLAB、V-REP、ROS等。
通过这些软件,可以构建机器人模型、环境模型、任务模型,并进行虚拟实验。
通过仿真,可以优化协作机器人系统的设计、算法和控制策略,在真实实验前预估机器人系统的性能并进行调优。
其次,虚拟实验是一种通过计算机模拟实际操作和交互的方法,用于研究和验证协作机器人系统的性能和可行性。
虚拟实验可以模拟真实环境中的物理参数、力学特性和操作条件,使研究人员能够在计算机上进行各种操作和测试。
在虚拟实验中,可以进行任务规划、路径规划、碰撞检测等操作,以评估协作机器人的工作效率和安全性。
虚拟实验可以减少实际试验的成本和时间,提高研究工作的效率和可重复性。
目前,常用的虚拟实验方法包括虚拟环境建模、虚拟实验控制和虚拟实验评估。
其中,虚拟环境建模是将实际场景和物体转化为虚拟模型,虚拟实验控制是通过计算机程序控制机器人和环境的行为,虚拟实验评估是采用指标和方法评估协作机器人系统的性能和可行性。
虚拟实验可以与仿真相结合,共同用于协作机器人技术的研究和应用。
虚拟实验提供了一个便捷和安全的环境,用于测试和验证算法和控制策略。
而仿真可以更加逼真地模拟机器人系统的行为和性能。
通过虚拟实验和仿真的结合,可以提高协作机器人系统的可靠性和性能,加快技术的研发和应用。
robocup机器人足球仿真第3章
3.1.3Tsinghuaeolus
Tsinghuaeolus是中国清华大学研制的一支球队 清 华 风 神 在 它 参 加 的 2 次 世 界 杯 和 4 次 中 国 RoboCup (2000-2003)都获得了冠军,这支球队攻击能力和防守 能力都很强。
3.1.3Tsinghuaeolus (1)
3.1.1CMU99(1)
3.1.1CMU99(2)
Real World:Server表示的世界状态 World State:agent内部可识别的世界状态。从Real World 到World State需要进行解析 Locker-room Agreement:用于Agent的同步,并定义了球 队进行协作的机构以及Agent之间的通讯协议。它仅能够 被Internal Behaviors访问 Internal State:存储了Agent的一些内部变量。可以存储 Agent以前或当前时刻的世界状态 Internal Behaviors:根据当前的世界状态、内部状态、球 队协议(Locker-room Agreement)来更新Agent的内部状 态的内部动作 External Behaviors:根据世界状态以及更新后的内部状态 来 做 出 一 个 动 作 送 给 动 作 器 以 作 用 于 真 实 世 界( Real World)。同时回送给Agent进行预测
3.1.2 FC Portugal 2000(4)
SBSP (Situation Based Strategic Positioning,基于场上形势 的策略站位)
SBSP就是Agent能够根据当前球场上的形势,包括现在球队正在
使用的阵形、战术以及球员的类型来确定球员在球场上的基本位 置;再通过球的位置、速度、球场上的形势(如本方是在进攻、 本方是在防守、双方的得失球等)以及球员的策略特性来修正基 本位置,得到球员的应该跑向的位置,也就是球员的策略跑位点。 球员的策略特性包括对球的吸引力、球场球员可以允许站的位置、 在场上某些区域的特定位置特性、粘球的倾向、越位线的设置以 及在某些特定形势下对场上特定目标的注意力等方面。
RoboCup仿真2D

硬件配置
根据机器人运动需求,选择合适的硬 件配置,包括电机、传感器、控制器 等,以确保机器人的运动性能和感知 能力。
运动控制算法
01
02
03
轨迹规划
根据比赛规则和任务需求, 规划机器人的运动轨迹, 使其能够完成各种动作和 任务。
控制策略
设计控制算法,如PID控 制、模糊控制等,以实现 对机器人运动的精确控制。
RoboCup仿真2D
目录
• RoboCup仿真2D简介 • RoboCup仿真2D的比赛规则与策略 • RoboCup仿真2D的技术实现 • RoboCup仿真2D的挑战与未来发展
01
RoboCup仿真2D简介
定义与特点
定义
RoboCup仿真2D是一个基于计算机 仿真的机器人足球比赛项目,旨在模 拟真实足球比赛中的场景和规则,通 过编程控制机器人进行比赛。
培训的发展。
智能城市和智能交通
02 仿真技术可以用于模拟城市和交通系统的运行,为智
能城市和智能交通的发展提供支持。
游戏开发和娱乐产业
03
RoboCup仿真2D可以应用于游戏开发和娱乐产业,
提供更加逼真的游戏体验。
THANKS FOR WATCHING
感谢您的观看
01
机器人控制
在仿真环境中,机器人需要精确 的控制算法来保证其运动和行为 的准确性。
02
03
复杂环境模拟
实时通信
模拟真实世界的复杂环境,如地 形、障碍物和动态目标,需要高 精度的地图和传感器技术。
在仿真比赛中,机器人需要实时 接收指令和数据,这要求高效的 通信协议和网络技术。
未来发展方向
智能化决策
度为10m。
RoboCup概述

Omnidirectional Camera
Vision system of Nubot
Vision system of UP-VoyagerIII
颜色空间
■ RGB是最常用最直观的颜色空间,使用红(Red)绿(Green)蓝(Blue)三个颜 色分量来描述颜色
颜色空间
■ YUV,视频处理中常见的颜色格式,Y为亮度分量,UV为色差分量.
V Y
U
V
U
Y
颜色空间
■ HSI又称HSB或HSV,是从人的视觉系统出发,用色调(Hue),色饱和 度(Saturation或Chroma)和亮度(Intensity或Brightness)来描述色彩.
Hue Scale
HSI颜色空间转换
在实现的时候为了提高运算速度,将公式优化为: S = MAX-MIN
简单视觉行为
x作为输入 作为输入 y作为输入 作为输入
PID
PID
输出
输出
运动的目标位置
x Speed_x Speed_y
y
叠加
Speed_y+Speed_x 左电机速度
Speed_y-Speed_x 右电机速度
机器人本体
RoboCup MSL的射球机构 的射球机构
推射( 推射(Place Shot) )
精彩视频
RoboCup 2006 Bremen MSL Finals
RoboCup 2007 Atlanta MSL Finals
THE END
谢谢!
�
中型组比赛场地
2007年ROBOCUP China Open场地为18米×12米
RoboCup 2007 Atlanta
RoboCup MSL的机器人平台 的机器人平台
RoboCup及微软(MS)组NAO类人仿真球队介绍
RoboCup及微软(MS)组NAO类人仿真球队介绍摘要RoboCup(Robot World Cup)即机器人世界杯足球锦标赛,主要目的就是通过提供一个标准的易于评价的比赛平台,来提高人工智能领域、机器人领域的研究水平。
RoboCup推出的一个基于微软的Microsoft Robotics Studio环境下的机器人足球比赛项目,是通过将现实中的Aldebaran机器人虚拟化,并且在模拟环境平台下进行Aldebaran机器人开发的项目。
本篇论文介绍了机器人足球世界杯RoboCup及其在中国的发展,然后介绍了Microsoft Robotics Studio(1.5)环境的搭建过程,最后介绍了Nao机器人的相关系统简介。
关键词:RoboCup 机器人足球微软Nao 仿真1 Robocup 简介机器人足球赛,顾名思义,就是制造和训练机器人进行足球比赛。
通过这种方式来提高人工智能领域、机器人领域的研究水平。
从1997年起,每年举办一界机器人世界杯足球赛。
早在1993年,Alan Mackworth就提出机器人足球比赛是很好的机器人和AI 研究的实验平台。
同时,还有一些学者也提出了这个问题。
在他们的努力下,1997年8月23-29日,第一届Robocup比赛及会议在日本的名古屋举行。
建造机器人进行足球比赛是很有挑战性的工作,激发了大家极大的研究兴趣。
Robocup通过提供一个标准任务,促进智能机器人的研究,包括理论、算法、智能体的结构、应用等方面。
机器人足球赛涉及人工智能、机器人学、通讯、传感、精密机械和仿生材料等诸多领域的前沿研究和技术集成,实际上是高技术的对抗赛。
国际上最具影响的FIRA和Robocup两大世界杯机器人足球赛,有严格的比赛规则,融趣味性、观赏性、科普性为一体。
机器人足球赛从一个侧面反映了一个国家信息与自动化领域基础研究和高技术发展的水平。
Robocup: 机器人足球世界杯1.1 Robocup简介●一个为促进足球机器人的发展而创立的国际性组织机器人足球世界杯(Robocup)是一个国际性的研究和教育组织,它通过提供一个标准问题来促进人工智能和智能机器人的研究。
机器人足球RoboCup世界杯介绍

机器人足球RoboCup世界杯介绍机器人可以踢足球,而且还举办了机器人的足球世界杯,下面由店铺为大家介绍RoboCup足球机器人世界杯,希望大家喜欢!RoboCup足球机器人世界杯简介在人工智能和机器人学的历史上,1997年被铭记为一个转折点。
1997五月,IBM深蓝在国际象棋中击败人类世界冠军。
四十年的挑战,在人工智能方面取得了一个成功的成果。
1997年7月4日,美国宇航局的探路者号成功着陆,第一个自治机器人系统——旅行者,被部署在火星表面。
和这些进步成果同样,RoboCup比赛向能够击败人类世界杯冠军队的足球机器人发展迈出了第一步。
机器人踢足球的想法是由Mackworth教授(加拿大英属哥伦比亚大学)于1992年首次提出的。
同时,一些日本的研究人员也在致力于以机器人踢球来推动科学技术发展的事情。
并于1993年六月在东京发起一场名为Robot J-League的机器人足球赛。
在赛事过后不到一个月内,有许多日本以外的科研人员呼吁将这一赛事扩大为国际联合项目。
于是,机器人世界杯(Robot World Cup) 应运而生,简称RoboCup。
RoboCup足球机器人世界杯比赛分类RoboCup足球赛分为5个组。
小型组:小型组机器人足球是机器人世界杯的一部分。
小型组(或者又被称为F180)机器人足球集中解决多个智能机器人间的合作问题以及在混合集中分布式系统下高度动态环境中的控制问题。
中型组:中型组机器人直径小于50厘米,机器人可以使用无线网络来交流。
比赛旨在提高机器人的自主、合作、认知水平。
类人组:在类人组中,具有人类相似外观及感知能力的自主机器人会进行足球比赛。
类人组以外的类人机器人感知世界外观的任务可以通过非人类的距离传感器来简化,而类人组中的机器人则不行。
除了足球比赛,还有技术挑战。
类人组的众多研究问题中包括:动态行走、跑步、平衡状态下踢球、视觉感知球、其他机器人球员、场地、自定位、团队比赛。
RoboCup3D人形仿真新手指南(server安装及代码编译)
RoboCup3D 人形仿真新手指南allen 2010-09-01本文主要包括三个方面:(1)ROBOCUP 3D 仿真环境的建立,即SERVER的安装(2)编译SEU-SPARK 源码生成可执行文件(3)开始一场比赛并使用TOOKIT 观看LOG。
第一节建立ROBOCUP 3D 仿真环境1.1 安装编译环境和依赖库本次校赛的操作系统采用Ubuntu10.04,使用CD安装后需安装相应的编译环境和依赖库。
1)安装编译环境等$sudo apt-get install build-essential g++ ruby1.8 ruby1.8-dev python2.6-dev cmake2)安装依赖库$sudo apt-get install libboost1.40-all-dev libfreetype6-dev libdevil-dev libode-dev libsdl-dev freeglut3-dev libtiff4-dev libslang2-dev注意:SERVER 需要安装的依赖库有SLANG、BOOST、FREEGLUT、ODE、DEVIL 和SDL1.2 安装3d SERVER此处可以直接执行install.sh脚本进行安装。
由于校赛server和最新的server有所不同,需打上校赛补丁$ patch -p1<xiaosai_patch.patch1)安装simspark$ cd simspark*$ mkdir build$ cd build$ cmake ..$ make$ sudo make install2)安装rcssserver$ cd rcssserver*$ mkdir build$ cd build$ cmake ..$ make$ sudo make install重启电脑打开终端输入rcsoccersim3d 将看到一个球场和一个球表示仿真环境已经安装成功(如图一).注意:如果安装过程中有错误提示,根据相应提示找到缺少或需重新安装的软件包。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要 : 在R o b o C u p标准组机器人 比赛 中, 由于 N A O机器人对其它队员的视觉识别容易受到场外背景和场内各队员之间的遮
挡等干扰 因素的影响 , 使得识 别结果存在许多错误和遗漏。通过多特征融 合 目标识别方法 , 分别从机器人视 觉图像 中提取
AB S TRACT: I n t h e S t a n d a r d P l a t f o r m L e a g u e o f Ro b o C u p g a me s ,p l a y e r r e c o g n i t i o n c a n b e d i s t u r b e d b y b a c k — g r o u n d a n d o v e r l a p b e t we e n o t h e r p l a y e s r w h i c h wi l l p r o d u c e e l T O s r o r mi s s i n g t o t h e r e c o g n i t i o n .I n o r d e r t O a v o i d t h e a f f e c t b y t h e i n t e r f e r e n c e f a c t o r s o f u s i n g s i n g l e f e a t u r e i d e n t i i f c a t i o n,w e u s e d mu l t i —f e a t u r e f u s i o n r e c o g n i t i o n a l g o — r i t h m t o o b t a i n t h e r e g i o n o f r o b o t s i n v i s u a l i ma g e .T h e S I F T f e a t u r e a n d c o l o r h i s t o g r a m w e r e e x t r a c t f o m r a n p i c t u r e o f r o b o t p l a y e r s ,a n d w e u s e d t h e f o me r r t o s c o p e t h e p a t t e r n r e g i o n a n d t h e l a t t e r t o r e i f n e i t .At l a s t , t h e e x p e r i me n t a n d i t s r e s u l t i l l u s t r a t e t h a t t h i s me t h o d h a s b a t t e r a c c u r a c y t h a n t h e t r a d i t i o n a l o n e wi t h s t r o n g a n t i — — i n t e r f e r e n c e c a ・ —
NA O Ro bo t Pl a y e r Re c o g ni t i o n a nd S i mu l a t i o n i n S t a nd a r d Pl a t f o r m Le a g ue o f Ro b oCu p
X I A N G Y u .ME N G Q i n g— h u
第 3 2 卷 第o 4 期
文章 编 号 : 1 0 0 6— 9 3 4 8 ( 2 0 1 5 ) 0 4—0 3 3 4— 0 5
计
算
ห้องสมุดไป่ตู้
机
仿
真
2 0 1 5 年0 4 月
R o b o C u p标 准 组 机 器 人 队 员 识 别 仿 真
向 宇 , 孟庆 虎
( 1 .河南科技大学信息工程学院 , 河南 洛 阳 4 7 1 0 0 3 ;
(1 .I n f o r m a t i o n E n g i n e e r i n g C o l l e g e ,H e n a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , 4 7 1 0 0 3 ,C h i n a ; 2 .D e p a r t me n t o f E l e c t r o n i c E n g i n e e r i n g , T h e C h i n e s e U n i v e r s i t y o f H o n g K o n g , H o n g K o n g 0 0 8 5 2, C h i n a )
出尺度不 变( S I F T) 特征与颜色直方图, 分别对两种特征进行匹配 , 通过 匹配成功 的 S I F T特征点来获取机器人在视觉 图像 中 的形体范围, 再通过与颜色特征相结合来 获取机器人的具体区域 , 避免了只采用单一特 征进行识别所受 到的干扰因素 的影 响。仿真结果分析显示 了改进方法相 比传统方法具有更好的识别准确度和抗 干扰能力 。 关键词 : 目标识别 ; 尺度不变特征 ; 颜色直方 图 中图法分类号 : T P 3 9 1 . 4 文献标识码 : B