码垛机器人的结构优化及轨迹规划研究
货物搬运机器人的运动规划与路径优化
货物搬运机器人的运动规划与路径优化随着现代物流行业的发展和技术的进步,货物搬运机器人越来越广泛地应用于仓储、制造业等领域,为企业提供了高效、准确和安全的物料搬运服务。
在机器人的工作中,运动规划和路径优化是实现货物快速搬运的关键步骤。
本文将围绕货物搬运机器人的运动规划和路径优化展开讨论。
一、运动规划货物搬运机器人的运动规划是指确定机器人在空间中的轨迹和姿态,以实现指定任务的过程。
运动规划的基本目标是保证机器人能够安全、高效地到达目标位置并完成任务。
下面介绍几种常见的运动规划方法。
1.规划算法货物搬运机器人的运动规划可以采用经典的算法,如最短路径算法、Dijkstra算法、A*算法等。
最短路径算法适用于计算无障碍的集中式环境,但在存在障碍物的环境下,需要结合其他算法解决避障问题。
Dijkstra算法和A*算法能够在有障碍物的环境中找到最短路径,其中A*算法通过启发函数提高搜索效率。
2.避障策略在实际工作中,货物搬运机器人需要避免与障碍物发生碰撞,以确保安全运行。
常见的避障策略包括静态避障和动态避障。
静态避障是通过建立环境地图,根据障碍物的位置进行路径规划,避免与障碍物发生碰撞。
动态避障是实时感知环境中的障碍物,通过实时调整机器人的运动轨迹,避免碰撞。
3.运动约束货物搬运机器人在进行运动规划时,还需要考虑到机器人自身的运动能力和限制。
运动约束包括机器人的最大速度、最大加速度、最大转角等。
在路径规划的过程中,需要根据运动约束生成合理的轨迹,以确保机器人的动作平滑并符合其运动能力。
二、路径优化货物搬运机器人的路径优化是在运动规划的基础上,进一步对机器人的轨迹进行调整,以提高运动效率和节约能源。
路径优化主要包括局部路径优化和全局路径优化。
1.局部路径优化局部路径优化是在机器人已经确定的规划路径上进行微调,以适应实际工作环境的要求。
常见的局部路径优化方法包括光滑轨迹生成、加速度规划和跟踪控制等。
光滑轨迹生成通过对机器人的路径进行平滑处理,减少路径的变化,从而提高机器人的运动效率。
码垛机器人的结构设计与分析机械手毕业设计
码垛机器人的结构设计与分析机械手毕业设计毕业论文(设计)摘要本文主要任务是码垛机器人的结构设计与分析。
首先介绍码垛机器人的研究背景,并简要介绍了国内外码垛机器人发展状况和主要结构形式,在对码垛机器人的功能需求分析和原理性设计后,参考了其他码垛机器人的结构,进行了总体方案设计,确定了本码垛机器人的结构类型,为具有四自由度的圆柱坐标式机器人。
同时在总体方案的基础上,从实际出发,对码垛机器人进行了整体结构设计,并进行了腰部,臂部和腕部等主要结构的选型设计与分析,其中详细设计了臂部的同步带传动、滚珠丝杠传动等。
本文主要采用Pro/E 软件对机械手进行了设计,使机械手的设计难度大大降低,提高了设计的效率。
最后,在运动学上对码垛机器人进行了分析,从理论上确保了在运动上的可靠性,保证码垛机器人能够正常地运行。
关键字:码垛机器人;四自由度;结构;设计毕业论文(设计)AbstractThe main task of the paper is the structure design and analysis of the palletizing robot. First of all,research background of the palletizing robot was introduced, and the brief description of the status of development and main structure was given at home and abroad. After functional requirements analysis and schematic design had done, Referencing to other palletizing robot structure, the overall program was designed, then determined the structural type of palletizing robotis the cylindrical coordinates with four degrees of freedom robot. On the basis of the overall program, proceeding from reality, the overall structure of palletizing robot was designed, and a selection of design and analysis of the main structure of the waist, arm and wrist had been done, including the detailed design of the arm belt drive and ball screw drive. Pro / E software was used to design robot, which made the difficulty of the work is greatly reduced, thereby improving the efficiency of the design. Finally, kinematic analysis had been done in theory, to ensure reliability of the palletizing robot .Key words: palletizing robot;four degrees of freedom; structure; design毕业论文(设计)目录第 1章绪论...................................................................... ........................................................................ .. (1)1.1研究背景...................................................................... ........................................................................ (1)1.2码垛机器人机发展状况 ..................................................................... . (2)1.3国内外码垛机器人主要结构形式 ..................................................................... (3)1.4本设计的主要任务 ..................................................................... ............................................................ 5 第 2章码垛机器人总体方案设计 ................................................................. . (6)2.1码垛机器人功能需求分析 ..................................................................... .. (6)2.2码垛机器人原理设计 ..................................................................... .. (8)2.3运动分析...................................................................... ........................................................................ .. 92.3.1自由度...................................................................... . (9)2.3.2速度分析...................................................................... (9)2.4总体结构设计...................................................................... (9)2.5小结...................................................................... ........................................................................ ........ 10 第 3章码垛机器人关键结构设计分析与选型 ................................................................. (11)3.1臂部...................................................................... ........................................................................ .. (11)3.1.1臂部结构...................................................................... . (11)3.1.2臂部臂长设计 ..................................................................... . (11)3.1.3大臂校核...................................................................... . (13)3.2滚珠丝杠副的选型计算 ..................................................................... . (16)3.2.1水平滚珠丝杠副的选型计算 ..................................................................... . (16)3.2.2垂直滚珠丝杠副的选型计算 ..................................................................... . (18)3.3电机选型计算...................................................................... . (19)3.4线性滑块选型计算 ..................................................................... (21)3.5同步带传动选型计算 ..................................................................... .. (26)3.5.1水平同步带传动选型计算 ..................................................................... .. (26)3.5.2腰部同步带设计 ..................................................................... .. (31)3.6本章小节...................................................................... .........................................................................34 第 4章总结与展望...................................................................... (35)41全文总结...................................................................... .........................................................................354.2展望...................................................................... ........................................................................ ........ 35 参考文献...................................................................... ........................................................................ ............... 36 致谢...................................................................... ........................................................................ ..................... 37 附录.....................................................................................................................................错误~未定义书签。
码垛机设计及优化方案
码垛机设计及优化方案一、介绍码垛机是一种自动化设备,用于将物品按照预定的方式堆放在货架或托盘上。
在物流和制造业中,码垛机的设计和优化方案对提高运输效率和降低人力成本至关重要。
二、设计方案1. 系统结构设计码垛机的结构设计应考虑以下几个因素:物品特性、堆放方式、垛高和垛形。
基于这些因素,可以选择合适的机器臂类型,如固定臂或旋转式臂,来满足需求。
此外,还应考虑系统的稳定性和安全性,以确保机器在堆叠过程中不会发生意外。
2. 视觉识别技术在码垛过程中,视觉识别技术可以帮助机器准确定位和识别物品。
使用相机、激光传感器或深度学习算法,可以实现高精度的物品检测和定位,从而提高码垛的准确性和效率。
3. 控制系统设计码垛机的控制系统应具备实时性和稳定性。
采用PLC(可编程逻辑控制器)或机器人控制器,以确保机器的运作安全可靠。
此外,通过优化控制算法和调整动作路径,可以降低机器的响应时间和能耗。
4. 系统集成与联动码垛机还需要与其他设备或系统进行联动,以实现物料的输送和堆放。
因此,在设计方案中需考虑与传送带、输送机、仓储系统等设备的良好协作。
同时,也应考虑与上层MES(制造执行系统)或WMS(仓储管理系统)的集成,实现自动化的物流管理。
三、优化方案1. 算法优化通过针对码垛机动作路径、物料识别和堆叠算法的优化,可以提高码垛的速度和准确性。
例如,使用优化的路径规划算法,可以减少机器移动的距离和时间,从而提高整体的效率。
2. 自适应调整码垛机应具备自适应调整的能力,以适应不同尺寸、重量、形状和堆放方式的物品。
通过自动调整机械臂的参数和力度,以及视觉识别系统的参数,可以确保机器在面对各种物品时具备适应性和稳定性。
3. 数据分析与追溯在码垛过程中,收集和分析关键数据可以提供有价值的信息。
通过分析堆放过程中的效率、准确性和资源利用情况,可以发现潜在问题和改进空间。
此外,通过对码垛记录进行追溯,可以追踪和溯源每个垛位的物料信息,提高整体的物流可追溯性。
码垛机器人机构设计与控制系统研究
cons of the location work space,the largest judgment and the development of robot to stack the path planning were sought.And stacking space judgment,a final graphic simulation and verification of the correctness of the trajectory were done.The use of dis· tributed control structure to achieve and the second system of monitoring and operations management,coordination of joint move— ment were done.The trajectory planning and independent development palletizing robot control software were tracked accurately.
Design and research of stacking robot kinem atics LI Cheng—wei .ZHU Xiu—li ,YUN Chao
码垛机器人的结构设计
码垛机器人的结构设计1.基本构架:码垛机器人的基本构架通常由底座、支撑臂、端夹器和控制系统组成。
底座负责行驶和支撑机器人的重量,支撑臂用于抓取货物并进行堆叠,端夹器用于稳定货物。
控制系统负责指导机器人的运动和操作。
2.机器人臂:机器人臂是码垛机器人最核心的部分,它需要具备足够的灵活性和稳定性。
通常采用的机械臂类型有:串联式机械臂、并联式机械臂和混合式机械臂。
这些机械臂都能够通过旋转、伸缩、抓取等运动来完成堆垛任务。
3.抓取装置:抓取装置用于抓取、移动和放置货物。
根据货物的形状、重量和尺寸不同,可以采用各种类型的抓取装置,如吸盘、夹爪、人工手臂等。
同时,抓取装置需要具备足够的灵活性和适应性,以适应各种不同类型的货物。
4.控制系统:码垛机器人的控制系统需要具备高度的智能化和自动化程度。
它需要能够自主感知环境,规划最优路径,调整姿态和力量,实时调整操作。
同时,也需要与上位系统进行良好的通信,接受任务指令,反馈执行情况。
5.安全系统:码垛机器人的安全系统是非常重要的一部分,它需要确保机器人在操作过程中不会造成伤害或事故。
安全系统通常包括传感器、摄像头、红外线防护器等。
这些设备可以实时监测机器人周围的环境,检测障碍物和人员,判断是否安全进行操作。
6.能源供应:码垛机器人通常需要使用电池或其他能源供应,以确保其正常运行。
能源供应系统需要稳定可靠,能够为机器人提供足够的电量,同时充电时间也应该尽可能的短。
总而言之,在码垛机器人的结构设计中,需要充分考虑机器人的稳定性、灵活性、安全性和智能性等因素,以满足不同工作环境和任务需求。
通过合理设计,可以实现高效、精确地完成码垛任务,提高工作效率和减少劳动力成本。
龙门式码垛机器人结构设计

龙门式码垛机器人是一种常见的工业自动化设备,用于在物流、制造等领域进行货物的堆码和码垛操作。
以下是一个典型的龙门式码垛机器人的结构设计:
1. 龙门架:龙门架是机器人的主体框架,通常由梁柱结构组成,具有足够的刚性和稳定性。
龙门架的大小和尺寸会根据所需的工作范围和承载能力进行设计。
2. 导轨系统:龙门架上安装有导轨系统,主要用于支持和引导机器人的移动。
导轨系统通常包括直线导轨和滑块组件,能够使机器人在X轴和Y轴方向上平稳运动。
3. 传动系统:传动系统用于驱动机器人在导轨上的移动。
常见的传动方式包括伺服电机、步进电机或液压系统等,通过齿轮、皮带等机构将电机的旋转运动转化为线性运动。
4. 码垛平台:位于龙门架的末端,用于承载和堆放货物。
码垛平台通常由一个或多个平行移动的横梁组成,通过气动、液压或电动机构控制其上下、前后和左右的运动。
5. 机械手臂:码垛平台上通常安装有一个或多个机械手臂,用于抓取和放置货物。
机械手臂通常由几个关节组成,通过电机驱动实现自
由度的控制。
常见的机械手臂结构包括伺服机械手臂、气动机械手臂等。
6. 感知与控制系统:龙门式码垛机器人还配备了感知与控制系统,用于感知环境和执行任务。
感知系统通常包括传感器,如视觉传感器、力传感器等,用于获取周围环境和货物信息。
控制系统则负责对机器人进行路径规划、运动控制和任务调度。
以上是典型的龙门式码垛机器人的结构设计,具体的设计方案会根据实际需求和应用场景的不同而有所差异。
设计时需要考虑机器人的承载能力、运动速度、精度要求以及安全性等因素,并确保机器人能够稳定、高效地完成码垛任务。
码垛机器人研究报告

码垛机器人研究报告随着科技的不断发展,机器人技术已经成为现代工业中不可或缺的一部分。
其中,码垛机器人作为一种高效、精准的机器人应用,正在逐渐被广泛应用于各种生产领域。
本文将对码垛机器人的技术原理、应用场景以及未来发展进行分析和研究。
一、码垛机器人的技术原理码垛机器人是一种自动化垛货机器人,主要用于将生产线上生产出来的货物,按照指定的规则和方式进行堆放和垛放。
其主要技术原理包括以下几个方面:1. 机器视觉技术码垛机器人需要通过机器视觉技术来获取货物的位置、形状、大小等信息,以便精准地进行垛放操作。
机器视觉技术主要包括图像采集、图像处理、特征提取、目标识别等过程。
2. 运动控制技术码垛机器人需要通过运动控制技术来实现精准的运动控制和定位。
运动控制技术主要包括电机控制、伺服控制、运动规划、轨迹规划等方面。
3. 机器人控制技术码垛机器人需要通过机器人控制技术来实现自主的决策和控制。
机器人控制技术主要包括机器人感知、机器人规划、机器人控制等方面。
二、码垛机器人的应用场景码垛机器人的应用场景非常广泛,主要包括以下几个方面:1. 快递物流随着电商业务的不断发展,快递物流的需求量也越来越大。
码垛机器人可以实现自动化的物流垛放,大大提高了物流效率和准确性。
2. 食品加工食品加工过程中,需要对食品进行分类、包装、垛放等操作。
码垛机器人可以帮助食品加工企业实现自动化的垛放操作,提高生产效率和质量。
3. 化工行业化工行业中,需要对化学品进行垛放和搬运。
码垛机器人可以帮助化工企业实现自动化的化学品垛放和搬运,提高生产效率和安全性。
4. 电子制造电子制造过程中,需要对电子零件进行垛放和组装。
码垛机器人可以帮助电子制造企业实现自动化的电子零件垛放和组装,提高生产效率和质量。
三、码垛机器人的未来发展随着科技的不断发展,码垛机器人的未来发展前景非常广阔。
未来,码垛机器人将会在以下几个方面得到进一步的发展:1. 智能化程度的提高未来,码垛机器人将会实现更高的智能化程度,具备更加自主的决策和控制能力。
龙门式码垛机器人结构设计
龙门式码垛机器人结构设计1. 引言龙门式码垛机器人是一种常用于工业生产线的自动化设备,具有高效、精准、稳定等特点。
在生产过程中,码垛机器人能够根据预设的算法和任务要求,将物品自动堆叠成所需形状或规则,并完成相应的码垛任务。
本文将对龙门式码垛机器人的结构进行设计与说明。
2. 结构设计2.1 机器人框架龙门式码垛机器人的结构主要由机器人框架、伺服电机、导轨和控制系统等组成。
机器人框架是机器人的主体部分,承载着整个机器人的动作和负荷。
一般采用刚性结构,由高强度的铝合金材料制成,以确保机器人在工作过程中的稳定性和可靠性。
2.2 伺服电机伺服电机是驱动龙门式码垛机器人进行运动的核心部件。
它通过转动输出轴,带动机器人框架上的各个连接件,实现机器人的升降、前后和左右移动等动作。
伺服电机具有高精度和高扭矩特点,能够准确地控制机器人的位置和姿态。
2.3 导轨导轨是支撑机器人框架并使其能够在水平方向移动的关键部件。
它由高强度金属材料制成,具有良好的刚度和耐磨性。
导轨通常分为横梁导轨和立柱导轨。
横梁导轨用于控制机器人框架的前后移动,而立柱导轨则用于控制机器人框架的升降动作。
导轨上安装有伺服电机,通过螺旋传动装置与机器人框架相连,实现机器人的运动。
2.4 控制系统控制系统是龙门式码垛机器人的大脑,负责对伺服电机进行控制和监控。
它由电气控制柜、编码器、传感器等组成。
电气控制柜集成了伺服电机驱动器和控制板,通过接口与上位机或PLC连接,接收控制指令,并将信号传递给伺服电机。
编码器用于测量伺服电机的转动角度,从而实现对机器人位置的准确定位和控制。
传感器用于监测机器人的工作状态和环境信息,例如温度、湿度等,以便对机器人进行故障诊断和自动保护。
3. 工作原理龙门式码垛机器人的工作原理基于先进的控制算法和运动规划。
当接收到码垛任务后,控制系统根据任务要求进行路径规划,确定机器人的运动轨迹和动作顺序。
然后,通过控制伺服电机的转动角度,驱动机器人框架按照规定的路径进行运动和动作。
码垛机器人结构设计与运动分析

D o i : 1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 0 7 ( 下) . 1 9
化 的先进 水平 。 所 谓 码 垛 就 是 按 照 集 成 单 元化 的 思 想 ,将 一
辅助
件 件 的 物 料 按 照 一 定 的 模 式 堆 码 成垛 , 以 便 使 单 元 化 的 物 料 实 现 搬 运 、 存 储 、 装 卸 、 运 输 等 物 流 活动 。近年 来 ,国内外码 垛 机器 人技 术 获得 了前 所 未 有 的发展 ,码 垛 机器 人 的吞 吐量 、柔性 、处理 速 度 以及抓 取 载荷 在不 断 的升 级 ,适 应场 合也 在 不断
[ 6 6 1 第3 5 卷 第7 期 2 0 1 3 — 0 7 ( 下)
I
Y
l l 5 0
訇 化
致末 端 运 动 的 不确 定 性 , 而 且 容 易 使 系统 产 生 振
动。
为 了 消 除 以上 影 响 , 我 们 取 连 杆 长 度 满 足 以 下 条件 :
( L c E -L A D ) + L c E =O
I -  ̄ D E
பைடு நூலகம்
( 3 )
B
2 0 O
^
取 图2 中参数 ,此时得 到F 点运动 方 程为
图2 臂 部结 构简图
1 f x : 1 6 2 0 + 6 . 7 5 x Y F = 1 1 5 0 _ 5 . 7 5 ) ,
码垛机器人轨迹规划研究现状与展望
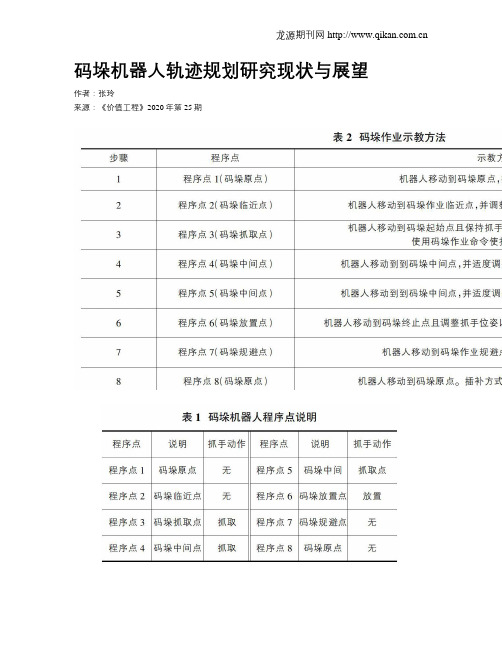
码垛机器人轨迹规划研究现状与展望作者:张玲来源:《价值工程》2020年第25期摘要:如何能够保证码垛机器人快速、准确、高效、稳定地抓取、搬运和放置货物,是码垛机器人的主要目的。
轨迹规划是完成码垛作业任务的关键环节。
分析码垛机器人标准作业流程,提出码垛运动轨迹的规划需求。
介绍了机器人轨迹规划的研究现状,最后展望机器人轨迹规划的发展趋势。
Abstract: The purpose of palletizing robot is to quickly, accurately, efficiently and stably grasp, carry and place the goods. Trajectory planning is the key link of palletizing task. This paper analyzes the standard operation process of palletizing robot, and gives the planning requirements of palletizing trajectory. This paper introduces the research status of robot trajectory planning, and finally looks forward to the development trend of robot trajectory planning.关键词:码垛机器人;轨迹规划;现状;发展趋势Key words: palletizing robot;trajectory planning;current situation;development trend中图分类号:TP242 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标识码:A ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1006-4311(2020)25-0227-020 ;引言碼垛机器人具有作业高效、码垛稳定等优点,解放工人繁重体力劳动,已在各个行业的包装物流线中发挥强大作用。
基于高速重载码垛机器人的机构优化及运动轨迹优化
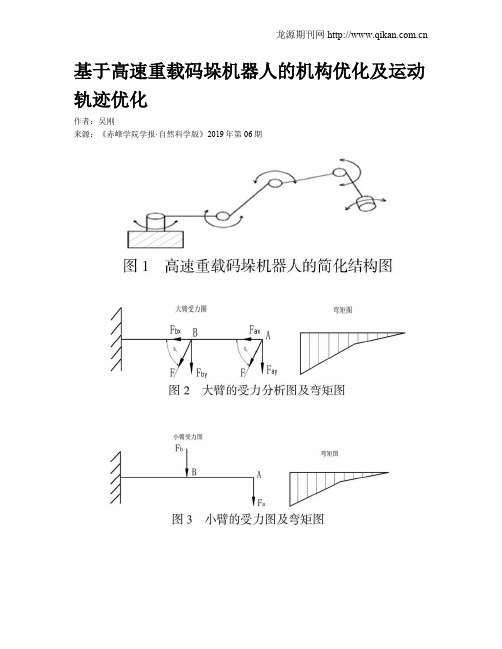
基于高速重载码垛机器人的机构优化及运动轨迹优化作者:吴刚来源:《赤峰学院学报·自然科学版》2019年第06期摘要:高速重载码垛机器人具有人工码垛所无法比拟的快速性、准确性、持续性和一致性.随着高速重载码垛机器人在汽车、冶金、物流等行业的广泛应用,日益加快的工业生产节奏和不断提高的码垛质量要求(如定位精度、堆放平稳度等),对高速重载码垛机器人的机构优化提出了更为苛刻的要求.针对高速重载码垛机器人高速、高精度、大负载的工作特性,有必要从高速重载码垛机器人的工作特性出发,对高速重载码垛机器人的大小臂、腰部以及腕部等重要构造进行机构优化[1].关键词:高速重载;码垛机器人;机构优化中图分类号:TP242; 文献标识码:A; 文章编号:1673-260X(2019)06-0072-021 引言本文以高速重载码垛机器人的工作特性为切入点,主要分析如何优化高速重载码垛机器人的的大小臂、腰部以及腕部等机构.通过机构优化减轻高速重载码垛机器人本体的重量,使机器人在运动过程中更加平稳,使机器人的柔性性能有所提高,更好地实现高速重载码垛机器人能够在低能耗、最优化的基础上,提高末端执行机的操作速度,完成各种各样具体操作任务的功能性运动.2 高速重载码垛机器人的机构优化本文针对高速重载码垛机器人的机构优化,主要对其大臂和小臂、腰部以及腕部等组成部分来进行优化分析.高速重载码垛机器人的简化结构图如图1所示.底座是高速重载码垛机器人的安装固定部分,执行机构和驱动装置都安装在底座上.大臂和小臂是执行机构中的主要运动部件,用来支撑腕关节和手部,并使它们在工作空间内运动.腕部是联结臂部与手部的部件,用于调整手部的方向和姿态.2.1 大臂和小臂优化高速重载码垛机器人的重要组成部分之一是其机构的大臂和小臂,高速重载码垛机器人的刚度受其大臂和小臂的刚度决定,机构整体的柔韧度受其大臂和小臂的柔韧度决定,因此高速重载码垛机器人的大臂和小臂在很大程度上直接影响机器人的性能[2].大臂主要做前后的摆动动作,通过与腰部连接的电机实现,大臂的受力图及弯矩图如图2所示.大臂的横截面为矩形.在优化高速重载码垛机器人的大臂后端部分时可以设置通孔,将其后端部分的通孔从后端机构中导入,导入后就可以与其前端的连杆进行连接,通过这样的方法来减轻前端的受力程度,进而维护机构的刚度.机构的大臂一面与腰部相连,一面与小臂相连.在与小臂的连接处舵机装在大臂上,方便控制小臂的运动.小臂的机构相较于大臂稍简单,两端呈对称机构,机器人小臂的前段机构变形不明显,受力不大,后段机构变形明显,受力较大,小臂的受力图及弯矩图如图3所示.在优化高速重载码垛机器人的小臂后端部分时,可以在机构小臂的前端机构部分设置通孔,再将其后端部分的通孔从前端机构中导入,导入后保证与其后端机构部分的连杆连接,以此种方法来减轻后端机构部分的受力程度,进而维护机构的刚度[2].2.2 腰部优化高速重载码垛机器人的腰部承载着大臂、小臂以及其他部件的重量,安装在腰部一侧的舵机用来实现大臂的前后运动.腰部的旋转靠安装在底座中的舵机完成,舵机与腰部间的联轴器通过键连接与腰部联结.在优化高速重载码垛机器人的腰部机构时,中间部分设计成部分中空,目的是减轻机身重量.2.3 腕部优化高速重载码垛机器人的腕部的主要作用是利用舵机控制手爪的工作,并有自己的工作范围.高速重载码垛机器人的腕部一般主要由以下几个零部件组成,分别是用于固定高速重载码垛机器人腕部的固定铰链、滑杆、几何体以及弹性支撑架等4个零部件组成.受其组成结构的影响,各个零部件的刚度是不能通过公式进行直接计算的,腕部的各个零部件中的缺陷只能通过静力分析这种方法来进行查找.要想维持高速重载码垛机器人腕部的刚度,可以在腕部的滑杆与几何体之间加上一个加强筋,合理缩短位移距离,从而达到优化效果[3].3 高速重载码垛机器人的运动轨迹优化非线性系统的最优控制问题是高速重载码垛机器人运动轨迹优化问题的本质所在.鉴于最优控制问题引申出的解决方法有古典变分法以及轨迹优化等方法.最优控制问题的公式如(3-1)所示.一些研究人员在对高速重载码垛机器人的运动轨迹优化的研究过程中,在现有研究成果的基础上不断总结和深化,陆续提出了路径最短、时间最短以及能量最优等运动轨迹优化的性能要素.高速重载码垛机器人的最优运动轨迹优化的积分公式如(3-2)所示.Ei=ψi(t)|dt,i=1,2,…,n; ;公式(3-2)Ei表示进行运动轨迹优化时第i个关节从起始点运行到终止点所消耗的能量,tg表示进行机器人运动轨迹优化时运行的总时间,ψi(t)表示机器人进行运动轨迹优化时第i个关节的力矩随时间变化的函数,n表示机器人进行运动轨迹优化时的关节数.在进行高速重载码垛机器人的运动轨迹优化时,首要目标就是要控制好目标点的移动.在控制目标点移动的过程中,可以通过电机来控制其移动方向以及运动速度.目标点的选定要考虑两个方面:一方面,在选定重物拿起点与码垛点时要事先控制好试教点的位置;另一方面,在选定重物拿起准备点与码垛准备点时要事先进行精确地计算,并且在选定码垛准备点时要以重物的堆放类型为依据.在进行高速重载码垛机器人的运动轨迹优化时要满足如下四个方面:(1)高速重载码垛机器人在实际工作时的运行轨迹一定要包含四个目标点;(2)在进行高速重载码垛机器人的运动轨迹优化时,其运动轨迹的运行中不仅要包括转角行程,而且还要包括曲线行程;(3)在实际运行轨迹中包含的四个目标点之间的间隔距离要保证相等;(4)使用插补法实现高速重载码垛机器人的运动轨迹进行的最优化[4].在满足上述四个方面的基础上,高速重载码垛机器人的运行轨迹优化中包含的四个目标点如图4所示.4 结束语本文除了介绍高速重载码垛机器人的机构优化,还在此基础上进而提出运动轨迹的优化,使机器人的各部分机构在强度和刚度上能够满足工作的要求,更好地控制机器人的移动方向以及运动速度的前提下确定好移动的目标.参考文献:〔1〕马清伍.高速重载码垛机器人动态特性分析及机构优化研究[D].哈尔滨工业大学,2015.〔2〕杨天存.重载码垛机器人前臂有限元分析及拓扑优化[J].机械,2017,44(1):51-54.〔3〕夏正亚.码垛机器人动力系统控制与轨迹优化研究[D].南京理工大学,2017,19(2):123-123.〔4〕郭瑞峰,李巖鹤,史世怀.关节型码垛机器人轨迹规划及运动学研究[J].机械设计与制造,2017,12(1):76-78.〔5〕郭大宝,梅涛,骆敏舟,冯宝林,赵江海.老人服务机器人机械臂的动力学分析与轻量化设计研究[J].中国机械工程,2012(10).〔6〕李伟平,王世东,周兵,张利轩,马义超.基于响应面法和NSGA-Ⅱ算法的麦弗逊悬架优化[J].湖南大学学报(自然科学版),2011(06).。
码垛机械臂轨迹规划与优化研究

码垛机械臂轨迹规划与优化研究码垛机械臂轨迹规划与优化研究摘要:码垛机械臂是现代物流行业中广泛应用的一种机器人,其用途包括在仓库和生产线上进行货物的搬运和垛放。
码垛机械臂的轨迹规划和优化是提高机械臂运动效率和减少能量消耗的关键技术。
本文在深入研究现有码垛机械臂轨迹规划算法的基础上,提出了一种基于动态规划和遗传算法的轨迹规划和优化方法,并通过仿真实验验证了该方法的有效性。
一、引言码垛机械臂广泛应用于仓储和生产线等领域,能够快速、准确地完成货物的搬运和垛放任务。
然而,由于机械臂的运动空间复杂且受到约束条件的限制,如何规划机械臂的运动轨迹成为了一个挑战。
传统的规划方法往往采用简单的路径规划算法,未能充分考虑到机械臂的运动效率和能量消耗的问题。
因此,进一步研究码垛机械臂的轨迹规划和优化方法十分必要。
二、码垛机械臂轨迹规划方法的研究现状目前,对于码垛机械臂的轨迹规划方法,主要有几种常见的算法,包括最短路径规划、区域划分和路径优化算法等。
最短路径规划算法是一种经典的方法,但其无法考虑到机械臂的运动效率和能量消耗等因素。
区域划分算法通过将工作空间划分为多个区域,然后在每个区域内进行路径规划,但该方法难以适应运动空间的变化。
路径优化算法主要通过遗传算法和粒子群算法等来寻找最优的路径,但其计算复杂度较高,无法实时适应机械臂的运动。
三、基于动态规划和遗传算法的码垛机械臂轨迹规划与优化方法针对现有码垛机械臂轨迹规划方法的不足,本文提出了一种基于动态规划和遗传算法的轨迹规划和优化方法。
首先,通过对机械臂的运动学和动力学进行建模,得到机械臂的运动约束条件。
然后,利用动态规划算法确定机械臂的最佳轨迹,以实现运动效率的最大化。
同时,通过遗传算法对机械臂的轨迹进行优化,以降低能量消耗。
最后,通过仿真实验验证了该方法的有效性。
四、仿真实验与结果分析通过对比实验,本文将提出的基于动态规划和遗传算法的轨迹规划方法与传统的最短路径规划算法进行了比较。
码垛机器人的结构和构成

码垛机器人的结构和构成码垛机器人是一种用于自动码垛作业的机器人系统,通常由多个组件和模块组成。
它通过自动识别、抓取、搬运和叠放物体,能够实现高效、准确的码垛操作。
在本文中,我将带您深入了解码垛机器人的结构和构成,以及它们在工业领域中的应用。
一、机器人系统结构1. 机械结构码垛机器人的机械结构是系统的基础,它由各种关节、执行器和传感器组成。
通常,机械结构需要具备稳定性、刚性和高精度,以确保机器人在码垛作业中能够准确运动和定位。
常见的机械结构包括臂式结构、轨道结构和人形结构,每种结构都有其适用的场景和优势。
2. 控制系统控制系统是码垛机器人的大脑,它负责协调和控制各个组件的运动和操作。
控制系统通常由硬件和软件组成。
硬件方面,常见的组件包括传感器、执行器、伺服系统和机械部件。
软件方面,控制系统需要编写运动控制算法、路径规划算法和感知算法,以实现自动化的码垛操作。
3. 视觉系统视觉系统在码垛机器人中起到了至关重要的作用。
它能够通过摄像头、激光雷达等设备实时获取工作环境的图像和数据,然后通过图像处理和识别算法,进行物体识别、定位和跟踪。
视觉系统在码垛作业中能够帮助机器人准确抓取和定位物体,提高作业效率和精度。
4. 抓取系统抓取系统是码垛机器人的关键组件之一,它能够根据不同的物体形状和特征,选择适当的抓取方式和工具。
常见的抓取方式包括机械爪、吸盘和磁吸等。
抓取系统需要具备稳定性、可靠性和适应性,以应对不同物体的尺寸和重量。
二、应用领域和前景码垛机器人在物流、仓储和制造业等领域具有广阔的应用前景。
以下是一些典型的应用案例:1. 电子产品码垛在电子产品制造过程中,通常需要对产品进行排序、包装和码垛。
码垛机器人能够通过视觉系统和抓取系统,实现对电子产品的自动识别、抓取和叠放,提高生产效率和质量。
2. 化工品码垛化工品生产过程中,常常需要对各种化工品进行码垛和包装。
码垛机器人能够根据化工品的不同形状和重量,选择合适的抓取方式和工具,实现自动化的码垛作业。
新型工业码垛机器人的轨迹规划研究
新型工业码垛机器人的轨迹规划研究摘要:在使用的过程中工业码垛机器人,该机器人操作需要提供一定的空间,并通过编程软件的任务分配到机器人的机械臂,轨迹精确控制的工作过程,但也保证机械臂操作的工作过程的稳定性真的确保机器人的轨迹精度的工作过程,平滑,没有特别大的声音。
通过运动计算可以得到机械手的精确轨迹参数。
本文对堆垛机器人的运行状态进行了科学的分析和研究。
关键词:新型工业码垛机器人;轨迹规划;研究1、前言工业码垛机器人是典型的现代化工业机器人,作为自动化领域的一门新兴技术,近年来在自动化生产线、物流等领域得到广泛应用,对企业提高生产效率、降低运营成本、优化作业布局、改善劳动条件具有重要意义。
工业码垛机器人要在作业空间准确完成给定任务,其末端执行器(抓手)的运动轨迹必须准确、稳定。
2、机器人的轨迹规划方法机械手在工作过程当中,实现科学准确的运动轨迹的规划,必须对机器人的各个关节的运动状态进行控制,机器人在工作轨迹的设定上,可以在一些特定的空间当中进行实施。
比如在关节空间进行运动位移和运动轨迹的设定工作当中,对空间当中所存在的一个位置进行模拟,在码垛机器人的控制器内部通过运动学计算方法,对每一个关节在工作当中的运动量和产生的位移量进行计算,机器人在接收到了内部控制指令之后,对外部的机械手实施准确的轨迹移动操作,然后通过关节的运动轨迹的控制,保证机械手可以准确的到达工作的点位上。
又比如在笛卡尔空间当中对机器人的运动轨迹进行设定的工作中,需要保证机器人的末端控制器在设定的位置,对工作当中的移动速度,加速度所需要的时间等相关的数据进行准确的计算。
在机器人的关节移动位置,机械手的摆动速度可以依照方程计算来得出。
在笛卡尔的空间量描述当中,其中计算量的大小远远超过了空间描述的数据参数总量,需要准确计算出机械手的运动速度,需要具有良好的硬件条件来加以支撑,通过这种方式可以有效达成机械手的规划运行路径。
笛卡尔空间当中的运行轨迹的设定,可以让人们更加直观地了解到机械手在运行轨迹当中的特点。
基于傅里叶级数展开的码垛机器人轨迹规划
基于傅里叶级数展开的码垛机器人轨迹规划在科技的巨轮上,码垛机器人如同一位勤劳的水手,承载着工业自动化的梦想。
然而,如何让这位水手在波涛汹涌的生产线中航行得更加平稳、高效?答案或许就藏在傅里叶级数的魔法之中。
想象一下,码垛机器人的手臂在空中舞动,它的轨迹就如同一首优美的交响乐。
每一个动作,每一次转动,都是乐章中的音符。
而傅里叶级数,就是那位指挥家,将这无数的音符编织成和谐的旋律。
通过傅里叶级数展开,我们可以将复杂的运动轨迹分解为简单的正弦波和余弦波的组合。
这些波形就像是大海中的波浪,虽然形态各异,却都遵循着相同的物理规律。
但是,仅仅拥有了指挥家的魔法还不够,我们还需要一把放大镜来揭示这魔法背后的奥秘。
夸张地说,傅里叶级数展开就像是一台超级显微镜,让我们能够看清楚轨迹中的每一个细节。
通过这台显微镜,我们可以发现轨迹中的不平滑之处,就像是音乐中的刺耳噪音。
然后,我们可以用更多的正弦波和余弦波来修正这些不完美,就像是调音师在调整乐器的音色。
然而,即使是最伟大的指挥家和最细心的调音师,也无法完全消除所有的噪音。
因为在现实世界中,总有意想不到的干扰和挑战。
比如,当码垛机器人需要在有限的时间内完成任务时,我们就不得不在速度和精度之间做出权衡。
这时,傅里叶级数展开就像是一张精密的地图,帮助我们在茫茫大海中找到最佳的航线。
当然,任何技术都不是万能的。
傅里叶级数展开虽然强大,但也有其局限性。
比如,对于一些非周期性的运动轨迹,傅里叶级数可能无法提供完美的解决方案。
此外,随着机器人自由度的增加,计算复杂度也会急剧上升。
这些问题就像是海图中的暗礁和漩涡,需要我们时刻保持警惕。
尽管如此,我仍然对基于傅里叶级数展开的码垛机器人轨迹规划持积极的态度。
因为我相信,正如航海家面对风浪时的勇敢和智慧,科技人员也一定能够克服这些挑战。
未来的码垛机器人将会像海豚一样灵活,像鹰一样精准,成为工业自动化领域的真正明星。
在这个充满可能性的未来里,让我们一起期待那位勤劳的水手——码垛机器人——在傅里叶级数的指引下,驶向更加辉煌的明天。
龙门式码垛机器人结构设计

龙门式码垛机器人结构设计本文旨在对《龙门式码垛机器人结构设计》进行简要介绍,讨论其背景和重要性。
此处补充详细内容)二、机器人结构设计原则在设计龙门式码垛机器人时,需要考虑以下几个主要原则:结构稳定性:确保机器人在运行时能够保持稳定的结构,以防止不稳定引起的意外情况发生。
结构的稳定性可以通过选择合适的材料和加强机身连接部件来实现。
结构稳定性:确保机器人在运行时能够保持稳定的结构,以防止不稳定引起的意外情况发生。
结构的稳定性可以通过选择合适的材料和加强机身连接部件来实现。
运动灵活性:机器人需要具备灵活的运动能力,能够在各种工作环境下快速、准确地移动和定位。
在设计中应考虑机器人的关节机构和传动系统,以实现运动的灵活性和精确性。
运动灵活性:机器人需要具备灵活的运动能力,能够在各种工作环境下快速、准确地移动和定位。
在设计中应考虑机器人的关节机构和传动系统,以实现运动的灵活性和精确性。
运动灵活性:机器人需要具备灵活的运动能力,能够在各种工作环境下快速、准确地移动和定位。
在设计中应考虑机器人的关节机构和传动系统,以实现运动的灵活性和精确性。
运动灵活性:机器人需要具备灵活的运动能力,能够在各种工作环境下快速、准确地移动和定位。
在设计中应考虑机器人的关节机构和传动系统,以实现运动的灵活性和精确性。
安全性:机器人操作需要遵循严格的安全标准,以防止对操作人员和周围环境的伤害。
在设计机器人结构时,应加入相应的安全装置,确保机器人在工作时能够及时检测和避免潜在的危险情况。
安全性:机器人操作需要遵循严格的安全标准,以防止对操作人员和周围环境的伤害。
在设计机器人结构时,应加入相应的安全装置,确保机器人在工作时能够及时检测和避免潜在的危险情况。
安全性:机器人操作需要遵循严格的安全标准,以防止对操作人员和周围环境的伤害。
在设计机器人结构时,应加入相应的安全装置,确保机器人在工作时能够及时检测和避免潜在的危险情况。
安全性:机器人操作需要遵循严格的安全标准,以防止对操作人员和周围环境的伤害。
码垛机器人技术方案
码垛机器人技术方案码垛机器人是一种自动化的物流设备,可以帮助企业实现自动化生产和配送,提高生产效率和产品质量。
下面将对码垛机器人的技术方案进行详细介绍。
1.机械结构设计码垛机器人的机械结构设计是整个设备的核心,其主要由机器人本体、输送带、夹具、传动机构、控制系统组成。
机器人本体是码垛机器人的主体,并由基座、臂杆、末端执行器和控制箱组成。
基座主要用于机器人的稳定和支撑,它包括直线导轨、驱动电机、减速齿轮、皮带轮传动装置、断电保护装置等机械部件。
臂杆是机器人的关键部件,它由铝合金等高强度材料制成,具有轻、刚、耐腐蚀等特点。
臂杆上安装了光电开关、传感器、电气解码器等电子元件,负责检测、控制和执行各项任务。
夹具是机器人的手臂,它可以根据不同的物品尺寸进行调整,以便更好地抓取物品。
传动机构由与轴链相连的轮齿、减侧器、变速器、马达等组成,可以用来控制机器人的移动、抓取和卸载操作。
控制系统由计算机、传感器、逻辑控制器、人机界面等组成,在机器人执行任务的过程中对其进行监控和控制。
2.视觉识别系统设计视觉识别系统是码垛机器人的另一个核心部件。
该系统主要由相机、光源、计算机视觉算法和图像处理软件等组成。
相机是视觉识别系统的核心部件,可以对物品进行拍照并传输图像给计算机进行处理。
光源主要用于提供充足的光线,以确保取得清晰、明亮的图像。
计算机视觉算法是根据相机获取的图像进行物品识别和分类,其主要包括形状特征识别、颜色识别和大小识别等。
图像处理软件主要用于对相机获取的图像进行处理,并根据算法提供识别、检测和分析功能。
其主要功能包括图像预处理、特征提取、匹配和分析等。
例如,图像预处理主要包括调整亮度、对比度、颜色平衡等来提高图像的清晰度和识别率。
3.控制系统设计控制系统是码垛机器人的重要组成部分,主要由运动控制系统、电气控制系统、PLC等组成。
其中,运动控制系统主要通过脉冲信号发生器、驱动器以及伺服电机等来实现机器人的运动,电气控制系统则主要控制机器人的开关控制和信号输入输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人轨迹规划一般分两种类型,一种是笛卡尔空间 轨迹规划,另一种是关节空间轨迹规划。其中,笛卡尔空 间轨迹规划对运动过程、运动路程以及姿态均有较为严格 的要求,该轨迹坐标系规划首先需要把机械末端起始与终 止位置参数及速度转化为一种运动学函数;其次,通过一 定方法呈现出不同关节运动轨迹,从而对运动轨迹起到控 制作用。关节空间轨迹规划主要是在运动路程与姿态相对 较弱基础上,根据运动学得到关节运动变量,并在一定条 件限制情况下,通过插补算法对关节运动轨迹实施圆滑操 作,以此达到一定要求。关节空间轨迹规划与笛卡尔空间 轨迹规划相比,能够更好地保证运动速度达到最优化。 2.3 笛卡尔轨迹规划特点及实现方法
在对码垛机器人进行结构选择过程中,需要遵循一定 原则,主要体现在以下几个方面:第一,工作空间应更加 优化,主要原因是工作空间大小与工作范围有一定的关系, 增加工作空间能够提升码垛机器人通用性;第二,机构设 计必须合理。若机构设计不合理,会出现臂杆运动无法安 装问题;第三,避免空间中发生奇异位形,机器人一般在 奇异位形中会失掉一个自由度,很难对其进行有效控制; 第四,采用尽量少的自由度。一般情况下,自由度与机器 人自身灵活性有一定的关系,自由度越多机器人越灵活, 并且可操作性也越好。但是会使结构出现复杂化与可控性 下降等情况,所以需要减少自由度 [2]。 1.3 码垛机器人关节优化改进
在对机器人进行科学研究过程中,运动规划是非常重 要的一项内容,主要分轨迹规划与路径规划两部分。其中 路径规划主要是指连接始点与起点位置的运动路径中各点 位形与曲线,一般情况下是针对运动中的运动轨迹规划所 做的设计。轨迹规划要求主要体现在以下几个方面:第一, 对机器人任务状态进行详细描述,并且在任务要求的点位 置信息基础上,通过计算机编程对末端轨迹实施自动化计 算,以此确保在规定时间内完成任务,并且提升任务可靠 程度;第二,在已知轨迹参数基础上,对轨迹自动生成的 数据进行有效描述;第三,对轨迹数据实施分析,对位置 及速度等信息进行确定,最终生成相应轨迹 [4]。 2.2 轨迹规划方案
设计 与 研 究
57
比如必须要经过一个位置或者曲线的机器人运动,能够有 效提升运动位置可靠性。另外,一般情况下,所使用的方 法需要通过一定的算法对空间轨迹曲线函数进行验证,以 此达到运动轨迹预期目标 [5]。 2.4 关节轨迹规划特点及实现方法
关节轨迹规划具有很多优点,主要包括两点:第一, 关节空间只对单一电机系统运动进行有效设计,计算量与 笛卡尔轨迹规划相比非常少;第二,关节轨迹规划在一定 程度上避免了奇异点问题,没有计算奇异点无线逼近情况, 但也不能有效保证任何空间运动点都不会出现类似的问题。 关节轨迹规划实现过程主要分为两个步骤:首先,获得空 间坐标系后,对不同关节运动轨迹坐标进行有效计算,并 在此基础上,确定机器人起点与终点中关节坐标,以此得 到相应的运动函数;其次,在关节起点与终点进行插补, 获得运动函数插补轨迹,在此过程中能够根据一些约束条 件选择插补方法。 3 结语
关键词:码垛机器人 结构优化 轨迹规划
随着我国物流行业不断发展,码垛机器人得到了广泛 应用。码垛机器人主要是通过集成单元思想将物料按照固 定模式放置,以此满足物料存放与装卸要求。在这一过程 中,码垛机器人工作效率直接关系到物料存储与装卸效率, 所以需要对码垛机器人进行结构优化与轨迹规划。 1 码垛机器人结构选型与关节设计 1.1 机器人常用构型介绍
根据实际工程需求,需要与原有设计方案进行有效融
ห้องสมุดไป่ตู้
合,并对设计过程中出现的问题进行有效分。其中需要设 计改进的部位主要有腕部连接部分、小臂与前大臂连接部 分、小臂与后大臂连接部分、前大臂与腰座连接部分和后 大臂与腰座连接部分。这些部分对整个机体来说尤为重要, 不仅起到关节有效连接作用,而且也承受了机体的主要压 力,所以对于这些部分进行改进,对提高整体机械运行稳 定性和可维护性有着重要意义。 2 码垛机器人轨迹规划 2.1 轨迹规划要求
对码垛机器人关节进行优化改进,能够提升机器人稳 定性,其中改进目标主要体现在以下几个方面:第一,稳 定性的提升。在对码垛机器人进行优化改进时,应提升连 接位置结构稳定性,减少机械间隙;第二,安装便捷性。 连接位置一般由轴与轴承之间的配合构成连接部件,其中 轴承安装在整个装配过程中尤为重要,为此需要简化设计 方案安装流程;第三,增加调整空间。机械安装对间隙调 整有较高要求,这就需要确保结构要求与设计原理相符, 所以要把安装间隙问题考虑在内 [3]。
工业机器人主要是由关节与杆件构成,不同杆件通过 关节拓扑结构可以组合成为不同种类的机器人机构,按照并 联机构、串联机构以及混联机构可以将其分为三种不同的机 器人:第一,串联机构具有现对较大空间,并且末端执行器 运动相对灵活,操作人员能够对其进行较好的控制,故在工 业机器人中得到了较好的应用;第二,并联机构主要是有不 同封闭运动链构成,有效连接执行器与机座,应用也较为广 泛;第三,混联机构主要是在串联与并联结构基础上优化 而来的,具有串联中工作空间与并联中结构刚度特点 [1]。 1.2 机器人构型选择
56
现代制造技术与装备
2019 第 4 期 总第 269 期
码垛机器人的结构优化及轨迹规划研究
陈 斌
(黎越智能技术研究(广州)有限公司,广州 510000)
摘 要:工业机器人是我国工业自动化发展的必然趋势。码垛机器人作为工业机器人的重要组成部分,在运 行的过程中具有工作效率高和成本低等优势,如在物流行业中,货物量大小直接与码垛机器人工作效率有较大关 系。因此,为了提升码垛机器人工作效率与质量,需要对码垛机器人结构进行优化,从而降低系统运行能耗,并 在此基础上进行轨迹规划,达到提升生产效率目标,更好地满足企业发展需求。