BEAMGN平面梁大挠度分析程序
混凝土梁的跨中挠度检测方法

混凝土梁的跨中挠度检测方法一、前言混凝土梁是一种常见的建筑结构,通常用于支撑屋顶和地板等重量。
在使用过程中,由于外部荷载和自身重量等原因,混凝土梁会出现一定的挠度。
因此,为了保证混凝土梁的安全性和可靠性,需要对其跨中挠度进行检测。
二、检测方法1.传统测量法传统测量法是指在混凝土梁下方设置测量仪器,通过测量仪器记录混凝土梁的变形情况。
这种方法需要在施工过程中预留测量孔,同时需要在梁下方设置支架来支撑混凝土梁。
由于需要对混凝土梁进行开孔和支撑,因此传统测量法的成本较高,同时对梁的使用造成一定的影响。
2.激光位移传感器法激光位移传感器法是一种非接触式测量方法。
该方法通过在混凝土梁两端设置激光位移传感器,测量混凝土梁在荷载作用下的变形情况。
该方法具有操作简便、测量精度高、对混凝土梁没有影响等优点。
但是,由于该方法需要在混凝土梁两端设置传感器,因此对梁端的要求较高。
3.光纤传感器法光纤传感器法是一种基于光纤传感器的测量方法。
该方法通过在混凝土梁内部嵌入光纤传感器,测量混凝土梁内部应变的变化情况,从而推算出混凝土梁的挠度。
该方法具有测量范围广、对混凝土梁没有影响等优点,但是需要在施工过程中预留光纤传感器的位置,因此对混凝土梁的施工有一定要求。
4.超声波测量法超声波测量法是一种基于超声波技术的测量方法。
该方法通过在混凝土梁内部设置超声波传感器,测量混凝土梁内部的声波传播速度,从而推算出混凝土梁的挠度。
该方法具有测量精度高、对混凝土梁没有影响等优点,但是需要在混凝土梁内部设置超声波传感器,因此对施工和维护有一定要求。
三、检测过程1.准备工作在进行混凝土梁的跨中挠度检测之前,需要进行一些准备工作。
首先,需要确定测量方法和测量仪器,并进行仪器的校准。
其次,需要对混凝土梁进行清理和处理,以便于测量仪器的设置和数据的采集。
最后,需要设置测量仪器,并进行连接和调试。
2.测量过程在进行混凝土梁的跨中挠度检测时,需要按照以下步骤进行:(1)根据测量方法的要求,在混凝土梁上设置测量仪器。
第9章__梁的挠度和刚度计算

第9章__梁的挠度和刚度计算在结构分析中,梁的挠度和刚度是非常重要的参数,它们能够帮助我们了解和评估梁的性能和稳定性。
本章主要介绍了梁的挠度和刚度的计算方法。
首先,我们需要了解梁的挠度是什么。
简单来说,梁的挠度指的是梁在承受荷载时的弯曲和垂直变形程度。
挠度大小反映了梁的柔软性和变形能力,对于结构工程来说,挠度必须在允许范围内,以保证结构的安全和稳定。
梁的挠度计算可以通过简化的工程解析方法或者数值计算方法来进行。
这里主要介绍两种常用的方法。
第一种方法是基于简化的工程解析方法,即梁的挠度计算公式。
根据梁的几何形状和受力情况,可以得到不同类型梁的挠度计算公式。
例如,对于简支梁,其挠度可以用以下公式计算:δ=(5*q*L^4)/(384*E*I)其中,δ是梁的最大挠度,q是梁的单位长度荷载,L是梁的长度,E是梁的弹性模量,I是梁的截面惯性矩。
对于其他类型的梁,如悬臂梁、连续梁等,也有相应的挠度计算公式。
通过这些公式可以得到梁的最大挠度。
第二种方法是使用数值计算方法,主要是有限元法。
有限元法是一种通过将结构分割成若干小单元,然后进行位移解和力学分析的方法。
通过有限元软件,可以模拟梁在荷载作用下的变形情况,并得到挠度的数值解。
此外,在梁的挠度计算中,还需要考虑梁的边界条件。
梁的边界条件决定了梁的约束程度,也会影响梁的挠度大小。
常见的边界条件包括简支、悬臂、固支等。
在梁的刚度计算中,主要考虑的是梁的弯曲刚度和剪切刚度。
弯曲刚度指的是梁在弯曲过程中对外力的抵抗能力,可以用弯矩-曲率关系来表示。
剪切刚度指的是梁在受剪力作用下的变形能力,可以用剪力-变形关系来表示。
梁的弯曲刚度和剪切刚度分别可以通过以下公式计算:弯曲刚度:EI=M/θ剪切刚度:GA=T/ϕ其中,E是梁的弹性模量,I是梁的截面惯性矩,G是梁的剪切模量,A是梁的横截面积,M是梁的弯矩,θ是梁的曲率,T是梁的剪力,ϕ是梁的剪应变。
通过计算弯曲刚度和剪切刚度,我们可以评估梁在荷载作用下的响应和变形情况,进一步判断结构的性能和稳定性。
混凝土梁挠度试验方法

混凝土梁挠度试验方法一、前言混凝土梁作为建筑结构中常用的构件,其挠度性能是决定其使用性能的关键因素之一。
因此,对混凝土梁挠度性能的测试方法十分重要,在实际工程中具有广泛的应用价值。
本文将介绍混凝土梁挠度试验方法。
二、试验原理混凝土梁挠度试验是通过施加一定的荷载在混凝土梁上使其发生挠度,测量混凝土梁在荷载作用下的挠度变形,以评价混凝土梁的承载力和变形能力。
三、试验设备1. 试验机:应具备稳定的载荷控制系统和位移控制系统,以保证试验过程的精确性和可靠性。
2. 测量仪器:包括位移传感器、荷载传感器、变形测量仪等。
四、试验步骤1. 制备混凝土梁:按照相关规范制备符合要求的混凝土梁样品,并进行养护。
2. 安装试验设备:将混凝土梁放置在试验机上,通过夹具固定梁两端,并安装好位移传感器、荷载传感器和变形测量仪。
3. 施加荷载:通过试验机控制系统施加荷载,荷载的大小应符合设计要求,并逐渐加大,直至混凝土梁发生明显的挠度。
4. 测量位移:在荷载作用下,通过位移传感器测量混凝土梁的挠度变形。
5. 测量荷载:在荷载作用下,通过荷载传感器测量混凝土梁的荷载大小。
6. 记录数据:根据试验结果,记录荷载-挠度曲线,计算出混凝土梁的弹性模量、极限荷载等参数。
五、试验注意事项1. 混凝土梁应具备足够的强度和刚度,以保证试验的准确性。
2. 试验机应具备稳定的控制系统和合适的位移控制方式,以保证试验过程的精确性和可靠性。
3. 测量仪器应具备合适的灵敏度和测量范围,以确保试验数据的准确性。
4. 试验过程中应密切注意安全事项,避免发生意外事故。
六、试验结果分析通过混凝土梁挠度试验,可以得到荷载-挠度曲线、弹性模量、极限荷载等参数。
根据试验结果,可以分析混凝土梁的承载能力和变形能力,从而为实际工程提供参考依据。
七、结论混凝土梁挠度试验是评价混凝土梁承载能力和变形能力的重要方法,通过合理的试验设备和操作步骤,可以得到准确可靠的试验结果,为实际工程提供参考依据。
简支梁悬臂梁挠度计算程序
简支梁悬臂梁挠度计算程序以下是简支梁和悬臂梁挠度计算程序的示例:```import math#简支梁挠度计算函数def simply_supported_beam(:length = float(input("请输入梁的长度(单位:米):"))load = float(input("请输入施加在梁上的集中载荷(单位:牛顿):"))modulus = float(input("请输入梁的弹性模量(单位:帕斯卡):"))moment_of_inertia = float(input("请输入梁的截面惯性矩(单位:米的四次方):"))max_deflection = (load * length**3) / (48 * modulus *moment_of_inertia)print(f"简支梁的最大挠度为:{max_deflection} 米")#悬臂梁挠度计算函数def cantilever_beam(:length = float(input("请输入梁的长度(单位:米):"))load = float(input("请输入施加在梁上的集中载荷(单位:牛顿):"))modulus = float(input("请输入梁的弹性模量(单位:帕斯卡):"))moment_of_inertia = float(input("请输入梁的截面惯性矩(单位:米的四次方):"))max_deflection = (load * length**3) / (3 * modulus *moment_of_inertia)print(f"悬臂梁的最大挠度为:{max_deflection} 米")#主程序def main(:print("梁的挠度计算程序")print("1. 简支梁")print("2. 悬臂梁")choice = int(input("请选择要计算的梁的类型(输入对应的数字):"))if choice == 1:simply_supported_beamelif choice == 2:cantilever_beamelse:print("输入无效的选项,请重新运行程序。
混凝土梁挠度测试方法

混凝土梁挠度测试方法一、概述梁的挠度是评估其刚度和承载力的重要指标之一。
混凝土梁挠度测试方法是通过对梁的弯曲试验来测量其挠度,从而评估梁的性能。
本文将介绍混凝土梁挠度测试的方法和步骤。
二、设备和材料1. 试验机:用于施加负载并记录荷载和挠度数据的机器。
根据需要,可以使用电子试验机或液压试验机。
2. 混凝土梁样品:用于测试的混凝土梁样品应符合相关标准,常用的尺寸为100×100×400mm或150×150×600mm。
3. 测量仪器:用于测量梁的尺寸和挠度的仪器。
应包括卡尺、游标卡尺、激光测距仪、数字显微镜和位移传感器等。
4. 其他材料:测量仪器的支架、安装夹具和数据采集器等。
三、实验步骤1. 准备工作(1)检查试验机是否正常工作,并进行标定。
(2)准备混凝土梁样品,并检查其尺寸和表面质量。
(3)设置测量仪器并进行标定,以确保其准确性。
2. 安装混凝土梁样品(1)在试验机上安装混凝土梁样品,并将其完全固定。
(2)在混凝土梁样品的两端安装位移传感器,并将其连接到数据采集器上。
(3)调整支架和安装夹具,使其支撑混凝土梁样品并保持水平。
3. 施加荷载(1)按照标准程序施加荷载,以产生梁的挠度。
(2)记录荷载和挠度数据,并在每次荷载增加时记录数据。
(3)在达到最大荷载后,逐步减小荷载,记录荷载和挠度数据。
4. 数据处理(1)将荷载和挠度数据转换为荷载-挠度曲线。
(2)计算梁的挠度,包括中间挠度、跨中挠度和末端挠度等。
(3)根据标准要求,评估梁的性能,包括弹性模量、极限荷载、挠度与荷载的关系等。
四、注意事项1. 混凝土梁样品应符合相关标准,并在测试前进行检查和处理。
2. 测量仪器应进行标定,并在测试过程中保持准确。
3. 在施加荷载时,应注意保护混凝土梁样品,以避免损坏或破裂。
4. 在数据处理中,应注意计算公式和单位的一致性。
5. 在整个测试过程中,应按照标准程序进行,以保证结果的可靠性。
混凝土梁的挠度试验方法
混凝土梁的挠度试验方法一、前言混凝土梁是建筑中常用的结构元件,其强度和刚度是保证建筑物安全的重要因素。
然而,在长期使用过程中,混凝土梁会出现一定程度的变形,如挠度等,这会对建筑物的正常使用造成影响。
因此,在设计和施工混凝土梁时,需要对其进行挠度试验以评估其变形性能。
本文将介绍混凝土梁的挠度试验方法,包括试验设备、试验步骤、试验数据处理等方面,以供工程技术人员参考。
二、试验设备1.混凝土梁试件:试件的尺寸和配筋应符合当地规范要求,常见的试件尺寸包括100mm×100mm×500mm、150mm×150mm×750mm 等。
试件制备时应注意保证混凝土的均匀性和致密性。
2.试验机:挠度试验需要使用万能试验机,常见的规格有100kN、200kN等。
试验机应具有稳定的加载速度和力测量系统,以确保试验数据的准确性。
3.试验测量设备:试验中需要使用挠度计和应变计等设备,以测量试件变形情况和应力变化情况。
4.辅助设备:试验中还需要使用支撑架、调整螺母等辅助设备,以保证试件的稳定性和试验过程的顺利进行。
三、试验步骤1.试件准备:将混凝土梁试件按照规定尺寸和配筋制备好,并在试件两端固定挠度计和应变计等试验测量设备。
2.试件支撑:将试件放置在试验机的支撑架上,并调整试件的水平度和位置,使其处于稳定状态。
3.预载荷:在试件上施加一定的预载荷,以保证试件的稳定性和减小试验误差。
4.加载:在试件上施加一定的力,以产生弯曲应力,从而引起试件的挠度变形。
加载过程中,要保持加载速度的稳定性,并记录试件的挠度和应变等数据。
5.卸载:在试件产生一定的挠度后,停止加载并卸载试件,记录试件的挠度和应变等数据。
6.重复加载:依次重复加载和卸载试件,每次加载时增加一定的力,直至试件破坏或达到规定的试验次数为止。
四、试验数据处理1.计算试件的挠度:根据试件上挠度计的读数,计算试件的挠度,常用的计算公式为:δ=(L-L0)/L0×100%其中,L为试件在加载时的长度,L0为试件在未受力时的长度。
混凝土梁的挠度计算与控制

混凝土梁的挠度计算与控制混凝土梁作为一种常见的结构元素,承载着重要的荷载。
在使用过程中,梁的挠度是一个非常重要的参数,直接影响到结构的稳定性和使用寿命。
因此,对于混凝土梁的挠度计算与控制有着重要的研究价值。
一、混凝土梁挠度的计算方法混凝土梁的挠度计算是一项复杂的工作,涉及到多个因素的综合考虑。
通常的计算方法包括弹性计算法和塑性计算法。
1. 弹性计算法弹性计算法是最常用的一种计算梁挠度的方法,它基于弹性理论,假定混凝土梁在荷载作用下弹性变形,不考虑梁的破坏。
这种方法适用于小荷载下的梁挠度计算。
具体的计算步骤是:首先,根据梁的截面形状、材料弹性模量、截面惯性矩和截面高度等参数,计算梁的刚度;然后,根据荷载大小和作用位置,计算出梁的弯矩分布情况;最后,根据梁的刚度和弯矩分布,计算出梁的挠度。
2. 塑性计算法塑性计算法是一种考虑梁的破坏情况的计算方法,适用于大荷载下的梁挠度计算。
该方法通过建立混凝土梁的破坏机制和塑性曲线模型,以及考虑梁的非线性行为,计算梁的挠度。
具体的计算步骤是:首先,根据梁的截面形状、材料弹性模量、截面惯性矩和截面高度等参数,建立梁的塑性曲线模型;然后,根据荷载大小和作用位置,计算出梁的塑性区域和破坏模式;最后,根据梁的塑性曲线模型和破坏模式,计算出梁的挠度。
二、混凝土梁挠度的控制方法混凝土梁的挠度控制是为了确保结构的安全和正常使用。
常用的控制方法包括材料选择、截面形状设计和施工工艺控制。
1. 材料选择在混凝土梁的设计和施工中,合理选择材料是挠度控制的关键。
通常采用高强度混凝土和高强度钢筋,以提高结构的刚度和抗弯能力。
此外,还可以采用预应力混凝土,通过预应力力和混凝土的共同作用,减小梁的挠度。
2. 截面形状设计混凝土梁的截面形状对于挠度的控制也有着重要的影响。
合理选择截面高度和宽度比例,增加梁的刚度,可以有效减小挠度。
此外,可以采用变截面和梁肋设计等方法,增加截面的刚度和抗弯能力,进一步控制挠度。
混凝土梁挠度检测技术规程
混凝土梁挠度检测技术规程一、前言混凝土梁作为建筑工程中常用的一种结构形式,其挠度是评估其结构安全性的重要指标之一。
因此,混凝土梁挠度检测技术规程的编制对于确保建筑工程的结构安全具有重要意义。
本技术规程主要介绍混凝土梁挠度检测的技术细节和操作流程,以确保检测数据的准确性和可靠性。
二、检测设备1. 振动式激光位移传感器:用于测量混凝土梁的挠度。
2. 支架:用于支撑传感器,确保传感器能够准确测量混凝土梁的挠度。
3. 数据采集器:用于收集传感器输出的数据,以便后续数据处理和分析。
4. 电缆和电池:用于连接传感器和数据采集器,以及为传感器供电。
三、检测前准备工作1. 确定检测位置:根据混凝土梁的设计图纸,确定检测位置和测量点。
2. 清理检测位置:将检测位置的表面清理干净,以便传感器能够贴合混凝土梁表面测量挠度。
3. 安装支架:根据检测位置的实际情况,安装支架以支撑传感器。
4. 安装传感器:将传感器固定在支架上,并将传感器与数据采集器连接。
5. 检查传感器:检查传感器是否正常工作,以确保测量数据的准确性。
四、检测操作流程1. 将传感器贴合混凝土梁表面,并将数据采集器连接到电缆和电池。
2. 打开数据采集器,并根据采集器的说明书设置参数。
3. 等待一段时间,直到采集器收集到足够的数据。
4. 关闭数据采集器,并将数据导出到计算机或其他存储设备中。
5. 对导出的数据进行处理和分析,计算出混凝土梁的挠度。
6. 根据计算结果,判断混凝土梁结构是否安全,并作出相应的处理和调整。
五、注意事项1. 传感器的安装位置应该准确无误,以确保测量数据的准确性。
2. 传感器应该贴合混凝土梁表面,以避免外界干扰。
3. 数据采集器应该设置正确的参数,以确保数据的准确采集和处理。
4. 检测过程中应该避免外界干扰,以确保数据的可靠性。
5. 检测完成后,应该对数据进行处理和分析,以便作出正确的结论和决策。
六、总结混凝土梁挠度检测技术规程是建筑工程中的重要环节,其准确性和可靠性对于保障建筑工程的结构安全具有重要意义。
钢筋混凝土荷载-挠度程序设计方法与结果分析
钢筋混凝土荷载-挠度程序设计方法与结果分析作者:赵佩君舒启军李顺玉来源:《中国新技术新产品》2011年第11期摘要:钢筋混凝土梁在荷载的作用下,荷载-挠度呈现非线性变化趋势.如果采用对曲率的二次积分法求挠度不能给出精确解。
对于钢筋进入屈服后,产生塑性铰以后的钢筋混凝土结构,不再适合曲率二次积分法求解挠度。
本文基于求解弯曲变形的共轭梁法,同时采用坂静雄建议采用的塑性铰区的长度计算方法,对该结构塑性区外的梁部分弹性卸载采用增量法计算。
得到该结构模型从弹性线性到弹性非线型再到破坏全过程的挠度数值计算方法,并编制相应的电算程序。
最后用悬臂梁为例,通过程序得出相应的荷载-挠度图,并比较其配筋率参数引起的变化,发现和实际相符。
关键词:挠度;数值计算;塑性铰;非线性分析中图分类号:TU37 文献标识码:A1 引言钢筋混凝土梁在荷载的作用下,结构的各部分会不同程度的出现裂缝,并随着荷载的变化而发展,从而降低梁的刚度,使结构挠度呈现非线性。
如果采用对曲率的二次积分法求挠度太繁琐,故采用共轭梁法相对较简单。
但如果构件部分截面已经进入屈服后,共轭梁法也相对麻烦。
现在结构设计,对产生塑性铰后的结构性能变化要求越来越严格,本文建立混凝土结构全程变形数值计算方法和相应程序。
2 计算原理经计算获得悬臂梁的弯矩-曲率的数值后,将悬臂梁分为N个小段,即有N+1个结点,假定在结点之间每小段的各截面处曲率是线性变化的,运用共轭法计算出转角和挠度。
3 荷载-挠度曲线具体计算方法采用分级加曲率的方法,以悬臂梁的固端截面B处(弯矩最大截面)为控制量,逐级增加曲率。
具体过程如图1所示4 塑性铰形成后的处理当固端弯矩到达My(钢筋屈服)后,认为形成塑性铰。
根据朱伯龙实验结果采用坂静雄建议的塑性铰区的长度,用下式计算:lp=2×(1-0.5ρs×fy/fc)ho;(式中 fy-钢筋的屈服强度;fc-混凝土的轴心抗压强度;ρs-纵向钢筋的配筋率;ho -截面的有效高度),由于考虑悬臂梁故塑性铰区长度取建议值的一半。
混凝土梁挠曲分析及其处理方法
混凝土梁挠曲分析及其处理方法一、概述混凝土梁作为结构中常用的承载构件,在受到外力作用时会发生挠曲变形,因此需要进行挠曲分析并采取相应的处理方法,以保证结构的稳定性和安全性。
二、混凝土梁挠曲分析方法1.基本假设挠曲分析的基本假设是:梁截面在受到弯矩作用时,仍能维持平面截面状态,即截面内的材料满足胡克定律,且截面平面始终保持平面状态。
2.挠曲方程挠曲分析的基本方程是二阶微分方程——挠曲方程,其表达式为:d2y/dx2 = M(x)/EI其中,y为梁的挠曲位移,x为梁上距离起点的位置,M(x)为梁上的弯矩,E为混凝土的弹性模量,I为梁截面的惯性矩。
3.边界条件挠曲方程需要满足边界条件,即在梁两端点的位置和转角处的位移和角度均为零。
4.解析解对于一些简单的梁形状和荷载条件,可以采用解析解的方法求解挠曲方程。
例如,对于简支梁的情况,可以采用三次函数形式的挠曲位移公式求解。
5.数值解对于一些复杂的梁形状和荷载条件,需要采用数值解的方法求解挠曲方程。
常用的数值解方法包括有限差分法、有限元法等。
三、混凝土梁挠曲处理方法1.增加截面尺寸增加截面尺寸可以增加梁的抗弯刚度,从而减小梁的挠曲变形。
但是,增加截面尺寸会增加梁的自重和材料成本,需要在实际工程中进行综合考虑。
2.增加纵向钢筋增加纵向钢筋可以增加梁的抗弯强度和抗弯刚度,从而减小梁的挠曲变形。
但是,增加纵向钢筋会增加梁的成本和施工难度,需要在实际工程中进行综合考虑。
3.增加剪跨比增加剪跨比可以增加梁的抗剪强度和抗弯刚度,从而减小梁的挠曲变形。
但是,增加剪跨比会增加梁的自重和材料成本,需要在实际工程中进行综合考虑。
4.增加支承刚度增加支承刚度可以增加梁的抗弯刚度,从而减小梁的挠曲变形。
常用的方法包括在梁两端设置钢板、加固支座等。
5.预应力加固预应力加固可以增加梁的抗弯强度和抗弯刚度,从而减小梁的挠曲变形。
但是,预应力加固需要施工难度大,需要在实际工程中进行综合考虑。
混凝土梁挠曲分析的有限元方法

混凝土梁挠曲分析的有限元方法一、前言混凝土梁挠曲分析是结构力学中的重要问题,其研究对于混凝土结构的设计和施工具有重要的指导意义。
在工程实践中,采用有限元方法进行混凝土梁挠曲分析已经成为一种主流的方法。
本文将介绍混凝土梁挠曲分析的有限元方法,包括建立有限元模型、施加荷载、求解过程和结果分析等内容。
二、建立有限元模型1.几何模型的建立首先需要根据实际情况确定混凝土梁的几何形状和尺寸。
根据混凝土梁的几何模型,可以建立有限元模型。
常见的混凝土梁几何形状有矩形、T形、I形等,根据实际情况确定混凝土梁的几何形状。
2.网格划分建立几何模型后,需要进行网格划分,将混凝土梁划分为若干个小单元,每个小单元称为单元。
对于混凝土梁的网格划分,可以采用自动生成网格的方法,也可以手动划分网格。
3.材料属性的定义在建立有限元模型时,需要定义混凝土材料的力学性质,包括弹性模量、泊松比、密度、强度等。
这些材料属性的定义对于计算结果的准确性和可靠性有着重要的影响。
三、施加荷载在建立有限元模型之后,需要施加荷载。
荷载的施加方式有多种,可以根据实际情况选择合适的荷载方式。
常见的荷载方式包括均布荷载、集中荷载、分布荷载等。
四、求解过程1.初始条件的设定在进行求解之前,需要对模型进行初始条件的设定。
初始条件包括混凝土梁的初始位移和速度等。
根据实际情况确定混凝土梁的初始条件。
2.求解方程组有限元方法的求解过程主要是求解方程组。
对于混凝土梁挠曲问题,方程组的求解可以通过有限元软件进行计算。
常见的有限元软件有ANSYS、ABAQUS、LS-DYNA等。
3.后处理求解方程组后,需要进行后处理。
后处理包括结果的可视化、结果的分析等。
结果的可视化可以通过绘制应力云图、位移云图等方式进行。
结果的分析可以通过计算混凝土梁的最大挠度、最大应力等指标进行。
五、结果分析在进行混凝土梁挠曲分析的有限元方法之后,需要对结果进行分析。
分析结果主要包括混凝土梁的最大挠度、最大应力、应力分布等。
(完整版)Abaqus分析实例(梁单元计算简支梁的挠度)精讲
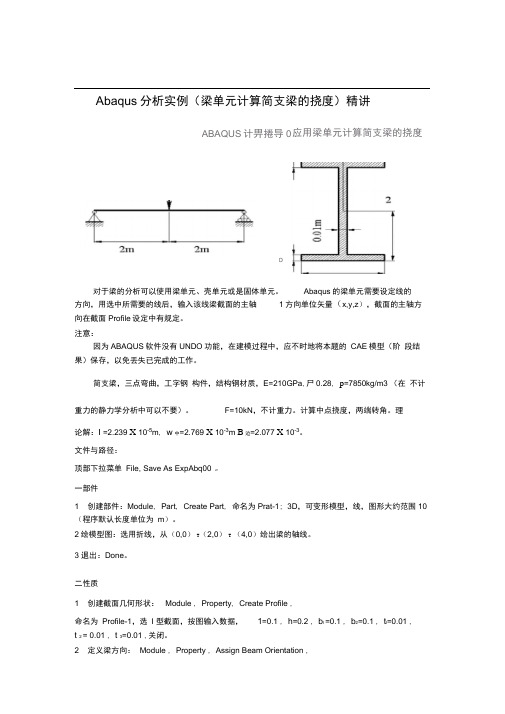
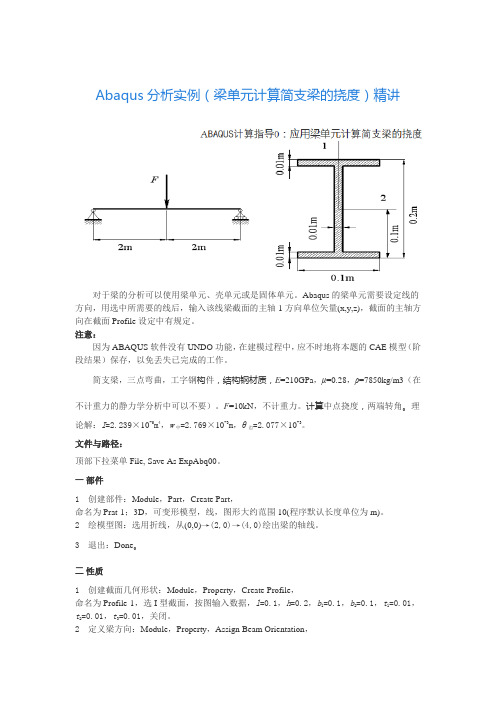
Abaqus分析实例(梁单元计算简支梁的挠度)精讲ABAQUS计畀捲导0 : 应用梁单元计算简支梁的挠度o对于梁的分析可以使用梁单元、壳单元或是固体单元。
Abaqus的梁单元需要设定线的方向,用选中所需要的线后,输入该线梁截面的主轴1方向单位矢量(x,y,z),截面的主轴方向在截面Profile设定中有规定。
注意:因为ABAQUS软件没有UNDO功能,在建模过程中,应不时地将本题的CAE模型(阶段结果)保存,以免丢失已完成的工作。
简支梁,三点弯曲,工字钢构件,结构钢材质,E=210GPa,尸0.28, p=7850kg/m3 (在不计重力的静力学分析中可以不要)。
F=10kN,不计重力。
计算中点挠度,两端转角。
理论解:I =2.239 X 10-5m, w中=2.769 X 10-3m B边=2.077 X 10-3。
文件与路径:顶部下拉菜单File, Save As ExpAbq00 。
一部件1 创建部件:Module, Part, Create Part, 命名为Prat-1; 3D,可变形模型,线,图形大约范围10(程序默认长度单位为m)。
2绘模型图:选用折线,从(0,0)T(2,0)T(4,0)绘出梁的轴线。
3 退出:Done。
二性质1 创建截面几何形状:Module , Property, Create Profile ,命名为Profile-1,选I 型截面,按图输入数据,1=0.1 , h=0.2 , b l =0.1 , b2=0.1 , t l=0.01 ,t 2 = 0.01 , t 3=0.01 ,关闭。
2 定义梁方向:Module , Property , Assign Beam Orientation ,选中两段线段,输入主轴 1 方向单位矢量(0,0,1)或(0,0,-1) ,关闭。
3 定义截面力学性质:Module ,Property ,Create Section,命名为Section-1,梁,梁,截面几何形状选Profile-1 ,输入E=210e9 (程序默认单位为N/m2,92GPa=10 N/m),G=82.03e9 , v0.28,关闭。
梁的挠度和刚度计算
F1
a
A
D F1 F1a
wC1
BC
F2 qB0
b 把未变形BC刚性化
C wC 2
c
B
F1
x
x
0,
l 2
x
l 2
,
3l 2
EIw1
1 24
qx4
C1x
D1
EIw2
1 48
ql
3l 2
3
x
C2 x
D2
x
0,
l 2
x
l 2
,
3l 2
EIw1
1 6
qx3
C1
x
0,
l 2
EIw2
1 16
ql
3l 2
2
x
C2
x
l 2
,
3l 2
18
4 边界条件、连续条件 5 梁的转角方程和挠曲线方程
[f] L ~ L 500 600
普通机车主轴
[q ] 0.30 3
3,影响变形的因素
L 10时, Q的影响只有M的3% h
由小变形条件, x不计
4,计算变形的方法
积分法、 叠加法、 能量法、
………
4
9.2 挠曲线近似微分方程
1、挠曲线近似微分方程
1 M z (x)
EI z
M>0
d
2 w( x) dx2
0
小变形
1
(1
w( x) w2 )
3 2
w(x)
w2 1 w(x) M z (x)
o
EI z
M<0
d
2 w( x) dx2
x
0
w(x) M z (x) EI z
ansys beam大挠度计算
ansys beam大挠度计算
在ANSYS中进行梁的大挠度计算可以通过以下步骤实现。
首先,需要创建一个梁的几何模型,并定义材料属性和约束条件。
然后,
使用适当的加载条件来模拟梁的受力情况。
最后,通过分析结果来
评估梁的挠度情况。
在创建几何模型时,可以使用ANSYS中的几何建模工具来绘制
梁的截面形状和尺寸。
然后,定义梁的材料属性,如弹性模量和泊
松比等。
这些参数将影响梁的弯曲刚度和挠度情况。
接下来,需要定义约束条件,例如固定端和支座条件,以模拟
梁的实际受力情况。
这些约束条件将影响梁的挠度响应。
在加载条件方面,可以施加各种静载荷或动载荷来模拟梁的受
力情况。
这些加载条件可以是集中力、均布载荷或者其他复杂的载
荷情况。
最后,进行分析并评估梁的挠度情况。
在ANSYS中,可以使用
不同的分析方法,如静力学分析或模态分析,来获取梁的挠度响应。
通过查看分析结果,可以评估梁的最大挠度、挠度分布情况等。
总之,通过在ANSYS中定义几何模型、材料属性、约束条件和加载条件,并进行相应的分析,可以实现梁的大挠度计算。
这将有助于工程师评估梁的结构性能并进行合理的设计优化。
桥梁挠度测量方法及比较分析(全文)
桥梁挠度测量方法及比较分析桥梁的挠度变形是桥梁健康状况评价的重要参数,在桥梁检测、危桥改造以及新桥验收等方面都需要准确测量桥梁的静、动态挠度值。
随着桥梁健康监测技术的进步,人们研究了许多用于位移及挠度测量的方法。
目前,国内外测量桥梁挠度的方法有许多种,下面对常见的几种测量方法的原理、特点及适用范围做以简要介绍。
1、传统的人工测量方法1.1百分表测量法百分表测量法是较传统的挠度测量方法。
百分表的工作原理,就是利用齿轮转动机构所检测位置的位移值放大,并将检测的直线往返运动转换成指针的回转转动,以指示其位移数值。
特点:1)优点是设备简单,可以进行多点测量,直接得到各测点的挠度值测量结果稳定可靠;2)缺点比较繁琐,耗时较长,工作效率较低,现场应用有很大局限性;3)适用于桥下可搭设支架的桥梁工程。
1.2 周密水准仪测量法水准测量又名“几何水准测量”,是用水准仪和水准尺测定地面上两点间高差的方法。
在地面两点间安置水准仪,观测竖立在两点上的水准标尺,按尺上读数推算两点间的高差。
通常由水准原点或任一已知高程点出发,沿选定的水准路线逐站测定各点的高程。
特点:1)具有速度快、计算方便、精度高和能够及时比较观测结果的特点;2)主要适用于测点附近能够提供测站条件、范围不大的桥梁挠度变化、观测点数不多的周密水准测量。
1.3 全站仪测量法全站仪挠度测量基本原理是三角高程测量。
三角高程测量通过测量两点间的水平距离和竖直角求定两点间高差的方法。
特点:1)这种测量方法简单,不受地形条件限制,是测量桥梁挠度的一个基本方法。
2)在桥梁加、卸载过程中,由于全站仪和棱镜固定不动,这就完全消除了仪器高和棱镜高的量测所带来的误差。
3)采纳高精度全站仪可以更加有效地提高桥梁荷载试验挠度测量精度。
2、桥梁挠度自动检测技术2.1 连通管测量法利用连通管原理,根据安装在桥梁各处连通管内液面高度的变化获得桥梁挠度的变化。
当桥梁梁体发生变形时,固定在梁体上的水管也将随之移动,此时,各竖直水管内的液面将与基准点处的液面保持在同一水平面,但各测点处的竖直水管液面却发生了大小不等的相对移动,测得的相对位移量即是该被测点的挠度值。
平面梁大挠度非线性问题的完备解与柔顺机构精确建模
平面梁大挠度非线性问题的完备解与柔顺机构精确建模平面梁大挠度非线性问题的完备解与柔顺机构精确建模摘要:本文探讨了平面梁大挠度非线性问题的完备解与柔顺机构精确建模。
首先介绍了平面梁的基本理论,并给出了大挠度问题的物理背景和研究意义。
然后利用Euler-Bernoulli梁理论,推导了平面梁大挠度非线性问题的数学模型。
接着提出了柔顺机构作为应对大挠度非线性问题的一种解决方案,并详细阐述了柔顺机构的特点和工作原理。
最后,通过实例分析,验证了柔顺机构在平面梁大挠度非线性问题中的有效性和准确性。
1. 引言平面梁是工程领域中常见的结构元件之一,其挠度随受力大小和载荷位置的变化而发生非线性变化。
研究平面梁的大挠度非线性问题对于提高结构的安全性和稳定性具有重要意义。
柔顺机构是一种能够根据外界环境和力的作用而自适应改变形态的机构,已在多个领域得到应用。
本文旨在通过完备的解析方法,研究平面梁大挠度非线性问题,并结合柔顺机构提出一种精确建模的解决方案。
2. 平面梁的基本理论平面梁是由多个杆件组成的结构,根据Euler-Bernoulli梁理论,可以得到平面梁的挠度方程。
平面梁在受力作用下,梁内各截面偏移量和转角均发生变化,挠度随载荷大小和载荷位置的变化而变化。
大挠度问题的引入是为了考虑载荷对平面梁的非线性影响,通过引入挠度的平方和三次方项,可以更准确地描述平面梁的挠度变化。
3. 平面梁大挠度非线性问题的数学模型根据Euler-Bernoulli梁理论和大挠度近似,可以得到平面梁大挠度非线性问题的数学模型。
该模型包括平均挠度方程和高次项挠度方程,可通过求解得到平面梁的挠度分布及应变能大小。
在求解过程中,需考虑边界条件和载荷情况等因素。
通过数值计算,可以得到平面梁在不同载荷下的挠度变化规律。
4. 柔顺机构的特点和工作原理柔顺机构是一种能够根据外界环境和力的作用而自适应改变形态的机构。
其特点是具有较高的灵活性和承载能力,可以模拟生物体的运动特性,应对不同复杂环境。
大挠度空间梁的静、动力学建模、分析与计算
综合以上文献的研究埘以看出,建模是基于Hamilton原理或者牛顿第二运动定 律,在考虑到电子大变形掰雩{超稿位移一应变韵鞯线镶菸盛保留撵瞧粱在弯曲变形 黠熬夸熬辫率瓣嚣绞篷磺翡肇疆上接导爨寒豹粱懿丈挠度运动凌力学徽分方程。~ 系列实验和实践表明,保留到二阶或者量阶非线性项的影响所建立的梁的大挠度送 嬲微分方程是瀵怒工程或麓装求豹。
1.2.1静力学方程的求解方法概述
对于大挠度梁结构来说,位移和应变之间的已经不再表示为线性关系。而且由 于梁结构的大挠度变形,位移和应变之间呈非线性关系,刚度矩阵也不再是常数矩 阵,而是单元位移的矩阵函数。几何非线性有限元是在传统方法的基础上,引入了
大挠度空间梁的静、动力学建模、分析与计算
应变与位移之间的几何非线性关系,然后再将系统动力学方程中的非线性项作’近 似变换,非线性项就可以表示为与节点位移有关的几何刚度矩阵㈣㈣,即
influence of the nonlinearity is obvious,the conclusion drawn from the present method is
same the
to the conclusion ofthe other correlative literatures。
Abaqus分析实例(梁单元计算简支梁的挠度)精讲
Abaqus分析实例(梁单元计算简支梁的挠度)精讲对于梁的分析可以使用梁单元、壳单元或是固体单元。
Abaqus的梁单元需要设定线的方向,用选中所需要的线后,输入该线梁截面的主轴1方向单位矢量(x,y,z),截面的主轴方向在截面Profile设定中有规定。
注意:因为ABAQUS软件没有UNDO功能,在建模过程中,应不时地将本题的CAE模型(阶段结果)保存,以免丢失已完成的工作。
简支梁,三点弯曲,工字钢构件,结构钢材质,E=210GPa,μ=0.28,ρ=7850kg/m3(在不计重力的静力学分析中可以不要)。
F=10k N,不计重力。
计算中点挠度,两端转角。
理论解:I=2.239×10-5m4,w中=2.769×10-3m,θ边=2.077×10-3。
文件与路径:顶部下拉菜单File, Save As ExpAbq00。
一部件1 创建部件:Module,Part,Create Part,命名为Prat-1;3D,可变形模型,线,图形大约范围10(程序默认长度单位为m)。
2 绘模型图:选用折线,从(0,0)→(2,0)→(4,0)绘出梁的轴线。
3 退出:Done。
二性质1 创建截面几何形状:Module,Property,Create Profile,命名为Profile-1,选I型截面,按图输入数据,l=0.1,h=0.2,b l=0.1,b2=0.1,t l=0.01,t2=0.01,t3=0.01,关闭。
2 定义梁方向:Module,Property,Assign Beam Orientation,选中两段线段,输入主轴1方向单位矢量(0,0,1)或(0,0,-1),关闭。
3 定义截面力学性质:Module,Property,Create Section,命名为Section-1,梁,梁,截面几何形状选Profile-1,输入E=210e9(程序默认单位为N/m2,GPa=109N/m2),G=82.03e9,ν=0.28,关闭。
桥梁静载试验中梁截面挠度的激光测试方法
A! 引 ! 言 挠度作为桥梁关键参数之一 # 对桥梁的健康有很 大的影响 # 挠度测量是桥梁参数监 测 中必 不 可少 的 # 也是桥梁结构动静载试验的一个重要 部 分 ’ 目 前工 程试验中通常采用的方法有几何水准测量 ( 全站仪三 角高程测量 ( 静力水准法 ( 专用挠度仪 ( 全站仪悬高测
* !# ’ 量法等) ’ 本文提出一种激光 测试方 法 # 与上述 方
法比较检测精度高 ( 测试方法简单实用 ’ 在桥 塔 架 设 一 个 自 准 直 激 光 器 # 在桥梁的待测 截面架设接收屏 # 利用数码摄像机拍摄接受屏上动 静态激光光斑图 像 ’ 在 加 载 工 况 下 # 桥梁待测截面 产生位移 # 激光 光 标 随 之 产 生 移 动 ’ 通 过 标 定 及 图
桥梁静载试验中梁截面挠度的激光测试方法 !! 董萼良 ! 黄跃平 ! 何小元 ! 汪凤泉
Hale Waihona Puke & !像中心法处理 ! 可 以 计 算 出 所 测 截 面 的 挠 度" 该 方 法在润扬长江公路大桥的动静载试验的静态挠度测 试中作为补 充 方 法 在 南 汊 悬 索 桥 的 C # T截面得以 实际应用 " 结果表 明 ! 激光测试与全站仪测试结果 基本一致 ! 而且 ! 检测精度高 $ 方法简单实用 " B! 测试原理 将自准直激光器设置于相对地面固定的物体上 % 桥塔 & ! 在待测 点 设 立 接 收 屏 ! 通过 @ @ B 数码摄像 机拍摄激光斑点 在 屏 上 的 移 动 ! 见 图 !" 图 中 8 指 所测挠 度 % 向 上 为 正& ! G指所测截面到激光器的 距离 "
图 B! 润扬大桥南汊悬索桥示意 图 A! 挠度测量原理
挠度、应力、应变的几种测试方法 - 副本

应力应变测试 在当今土木工程行业中,应力应变测量广泛地应用于建筑、 铁路、桥梁、交通、大坝等结构上。结构的应力应变测试 是工程人员进行结构设计优化,了解结构受力状态以及保证 结构安全的一个很重要的环节。例如在大跨度桥梁的施工 过程以及营运过程的长期健康监测中,对关键截面的应力应 变进行监测,为桥梁的施工、营运、加固提供依据,确保结构 安全是桥梁建设一个必不可少的环节。如何才能快速、准 确地测量出我们所关心的结构的应力应变,是每一个工程人 员十分关心的问题。
光电成像挠度测量系统示意图
优缺点:具有非接触、测量距离远、测量精度高的 优点,不仅可用于桥梁建设中的施工监控,还可进行 长期在线监测,具有非常广阔的应用前景。可以实现 二维动、静挠度检测,与计算机相连可使记录分析 实现自动化。 徐耀宇等人利用北京光电所生产的BJQN-4 型光 电桥梁挠度检测仪在金刚桥的成桥试验中测量桥梁 的动挠度, 取得很好的效果 ; 潘权等利用光电测试系 统在东营黄河公路大桥进行动载试验测试动挠度曲 线, 从而分析了桥梁的动态性能。
优缺点:电阻应变测试技术的优点: 1) 灵敏度( 1 ∀!) 和准确
度( 约1 %~ 3 %) 高, 数据稳定可靠; 2) 尺寸小、重量轻, 测 试技术简单, 可以应用于静、动态测量; 3) 便于多点测量, 易 于集中, 测量数据便于记录, 且能远距离传输。 电阻应变测试技术的缺点: 1) 对于应力集中部位的测量不够 准确; 2) 一般只能测量构件表面应变, 难于显示其内部应变; 3) 输出信号较小, 动态测量时, 接线往往需要采取屏蔽措施 以防止干扰。
即液位在玻璃管内的上升量就是该点的结构下沉量(挠度值),通过 读取有刻度玻璃管中液位的变化值,就得到了桥梁在该点的挠度值。
连通管式光电液位监测系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BEAMGN平面梁大挠度分析程序BEAMGN——平面梁大挠度分析程序************************************************* *** THE NONLINEAR FINITE ELEMENT ANALYSIS * *** PROGRAM FOR BEAM T.L. AND U.L. METHOD * ************************************************* PROGRAM MAIN************************************************* *** 变量说明* FILE1: 输入文件名* FILE2: 输出文件名* FILE3: 图形结果数据文件名* NTU: 计算方法指示数,1 为T.L.,2 为U.L.* LOAD:载荷因子数* EF: 拉伸刚度* EI: 抗弯刚度* NE: 单元总数* IME: 增量步总数* ACC: 计算精度* MM: 迭代信息数,1 为等刚度,2 为变刚度* NRM: 广义外力作用个数* NU: 初始位移约束个数* XX1,YY1,XX2,YY2: 梁两端点坐标* PNM: 广义力信息,PNM(I,1),PNM(I,2),PNM(I,3)分别为作用点号,方向和数值* UXY: 结点位移约束信息,UXY(I,1),UXY(I,2),UXY(I,3)为作用点号,方向和数值* M: 结构自由度数* NE: 单元总数* BO:单元两结点连线与坐标方向夹角* PP: 总结点载荷数组* U: 总位移数组* P: 结点增量载荷数组*************************************************IMPLICIT REAL*8 (A-H,O-Z)DIMENSION WK(63,63),U(63),DU(63),RS(63,1),PP(63,1),RN(20), & XY(21,2),DLL(20),BO(20),XYO(21,2),TXY(20,2),TL1(20),& PNM(10,4),UXY(10,3),FP(63,1),P(63,1),UI(63),TL2(20),& PP1(63,1),UU(63)*** INPUT DATA *CHARACTER FILE1*12,FILE2*12WRITE(*,*)'PLEASE INPUT THE INPUT FILE NAME'READ (*,'(A)') FILE1OPEN (1, FILE=FILE1, STATUS='OLD')OUT=2IF(OUT.EQ.2) THENWRITE(*,*)'PLEASE INPUT THE OUTPUT FILE NAME' READ (*,'(A)') FILE2OPEN (2, FILE=FILE2, STATUS='NEW')WRITE(2,*)'------ THE RESULTS OF CALCULATION ------' END IF READ(1,*)NTU,LOADWRITE(*,*)'------ THE RESULTS OF CALCULATION ------' READ(1,*) EF,EIREAD(1,*) NE,IME,ACC,MM,NRM,NUNP=NE+1READ(1,*) XX1,YY1READ(1,*)XX2,YY2XXX=(XX2-XX1)/NEYYY=(YY2-YY1)/NEDO 10 I=1,NPXY(I,1)=XXX*(I-1)XY(I,2)=YYY*(I-1)10 CONTINUEDO 11 I=1,NRMREAD(1,*) PNM(I,1),PNM(I,2),PNM(I,3)11 CONTINUEDO 20 I=1,NUREAD(1,*) UXY(I,1),UXY(I,2),UXY(I,3)20 CONTINUEM=3*NPM1=M+1PI=3.1415926DO 50 I=1,NE50 BO(I)=0.0DO 60 I=1,MPP(I,1)=0.0U(I)=0.060 P(I,1)=0.0*** FORM TOTAL LOAD COLUMN MATRIX * DO 70 K=1,NRMII=3*(PNM(K,1)-1)+PNM(K,2)70 P(II,1)=PNM(K,3)/IMEDO 75 I=1,NPDO 75 J=1,275 XYO(I,J)=XY(I,J)NO=0*** FORM LOCAL COORDINATE *110 CALL FLC(NE,M,RS,UI,DU,RN,XY,BO,DLL) 1500 NO=NO+1*** FORM INCREMENT LOAD PP * IF(LOAD.GT.0) THENIF(NTU.EQ.2) THENDO 90 I=1,M90 PP(I,1)=P(I,1)ELSEDO 95 I=1,M95 PP(I,1)=P(I,1)*NOEND IFELSEE=M-1F=M-2PP1(E,1)=0.PP1(F,1)=0.0UU(M)=DABS(U(M))IF(NTU.EQ.2) THENDO 15 I=1,M15 PP(I,1)=0.0PP(E,1)=P(E,1)*COS(UU(M))PP(F,1)=P(E,1)*SIN(UU(M))ELSEPP(E,1)=P(E,1)*COS(UU(M))+PP1(E,1)PP(F,1)=P(E,1)*SIN(UU(M))+PP1(F,1)PP1(E,1)=PP(E,1)PP1(F,1)=PP(F,1)END IFEND IFNUM=01600 CONTINUE*** FORM THE ELEMENT STIFFNESS MATRIX WK AND * *** ASSEMBLE THE TOTAL STIFFNESS MATRIX TWK * CALLWKK(NE,DLL,RN,BO,WK,EF,EI)1800 NUM=NUM+1*** CALCULATE THE INEQUILIBRIUM FORCE FP * DO 105 I=1,M 105 FP(I,1)=PP(I,1)-RS(I,1)*** SOLVE INCREMENT DISPLACEMENT DU AND TOTAL * *** DISPLACEMENT UI WITHIN INCREMENT SETP * CALLJFC(WK,FP,DU,M,M1,NU,UXY)DO 130 I=1,MUI(I)=UI(I)+DU(I)130 CONTINUE*** CALCULATE THE REACTION COLUMN MATRIX RS * CALL RSS(DLL,RS,RN,BO,NE,UI)*** JUDGE CONVERGENCY |DU/UI|< 0.001? * AXM=0.0DO 140 I=1,NPII=3*(I-1)+2AX=DABS(DU(II)/UI(II))IF(AX.GT.AXM) THENAXM=AXEND IF140 CONTINUEIF(AXM.GT.ACC) THENIF(MM.EQ.1) THENGOTO 1800ELSEGOTO 1600END IFEND IF*** CALCULATE TOTAL DISPLACEMENT U AND * *** REVISE NODES COORDINATE XY *IF(NTU.EQ.1) THENDO 145 I=1,M145 U(I)=UI(I)ELSEDO 148 I=1,M148 U(I)=U(I)+UI(I)END IFDO 180 I=1,NPI1=3*(I-1)+1I2=I1+2DO 180 J=I1,I2XY(I,1)=XYO(I,1)+U(I1)XY(I,2)=XYO(I,2)+U(I1+1)180 CONTINUEIII=NODO 450 J=1,2450 TXY(III,J)=XY(NP,J)*** OUTPUT CALCULATION RESULTS U * IF(OUT.EQ.1) THENWRITE(*,1000)NO,NUMWRITE(*,1001)DO 200 I=1,NPII=3*(I-1)+1WRITE(*,1002)I,U(II),U(II+1),U(II+2)200 CONTINUEELSEWRITE(2,1000)NO,NUMWRITE(2,1001)DO 300 I=1,NPII=3*(I-1)+1WRITE(2,1002)I,U(II),U(II+1),U(II+2)300 CONTINUEWRITE(2,1007)((XY(I,J),J=1,2),I=1,NP)1007 FORMAT(1X,2E14.2)END IF1000 FORMAT(//1X,'INCREMENTSTEP:',I2,/1X,'ITERATIVE TIME:',I2)1001FORMAT(/1X,'NO',11X,'U',14X,'W',12X,' DW/DX')1002 FORMAT(1X,I2,3F15.6)IF(NO.NE.IME) THENIF(NTU.EQ.2) THENGO TO 110ELSEGOTO 1500END IFELSEEND IFWRITE(2,*)WRITE(2,*)'--------Graph--------'DO 500 I=1,NOTL1(I)=TXY(I,1)/300.0500 TL2(I)=DABS(TXY(I,2)/300.0)WRITE(2,1005)WRITE(2,1003)(I,TL1(I),I=1,NO)WRITE(2,1006)WRITE(2,1003)(I,TL2(I),I=1,NO)1003 FORMAT(1X,I2,F14.2)1005 FORMAT(/1X,'NO',5X,'(L-U)/L')1006 FORMAT(/1X,'NO',5X,'W/L')END************************************************* *** THIS SUBROUTINE IS USED TO CALCULATE * *** NODES REACTION* ************************************************* SUBROUTINE RSS(DLL,PP,EFA,B0,NE,U)IMPLICIT REAL*8 (A-H,O-Z)REAL*8 B(2,6),DLL(20),E(2,1),P(6,1),BL(2,6),BLT(6,2),B0(20), &PG(6,1),EFA(20),PP(63,1),U(63),P1(6,1),B00(2,6),P2(1,6), &BLL(3),CC(6,2),BT(6,2),C(2,6),T(6,6),B00T(6,2),PGT(1,6)COMMON/A1/D(2,2)/A2/X(3),W(3)COMMON/A3/X1(20),X2(20),Y1(20),Y2(20),Z1(20),Z2(20) DO 22 I=1,3*(NE+1)22 PP(I,1)=0.0DO 33 N=1,NECALL TT(T,B0,N,CCOS,SSIN)NI=3*(N-1)+1U1=U(NI)*CCOS+U(NI+1)*SSINW1=-U(NI)*SSIN+U(NI+1)*CCOSU2=U(NI+3)*CCOS+U(NI+4)*SSINW2=-U(NI+3)*SSIN+U(NI+4)*CCOSO1=U(NI+2)O2=U(NI+5)X1(N)=U1X2(N)=U2Y1(N)=W1Y2(N)=W2Z1(N)=O1Z2(N)=O2DL=DLL(N)DO 1 I=1,2DO 1 J=1,61 B(I,J)=0.0DO 11 I=1,6P1(I,1)=0.011 P(I,1)=0.0DO 10 I=1,3B00(1,1)=-1/DLB00(1,2)=0.0B00(1,3)=0.0B00(1,4)=1/DLB00(1,5)=0.0B00(1,6)=0.0B00(2,1)=0.0B00(2,2)=12.*X(I)/(DL**3)-6./DL**2 B00(2,3)=-4./DL+6.*X(I)/(DL**2)B00(2,4)=0.0B00(2,5)=6./(DL*DL)-12.*X(I)/(DL**3) B00(2,6)=-2./DL+6.*X(I)/(DL**2)G2=6.*X(I)*X(I)/DL**3-6.*X(I)/DL/dl G3=1.-4.*X(I)/dl+3.*X(I)*X(I)/DL**2G5=6.*X(I)/(DL*DL)-6.*X(I)*X(I)/DL**3 G6=-2.*X(I)/DL+3.*X(I)*X(I)/DL**2BLL(I)=G2*W1+G3*O1+G5*W2+G6*O2BL(1,1)=0.0BL(1,2)=BLL(I)*G2BL(1,3)=BLL(I)*G3BL(1,4)=0.0BL(1,5)=BLL(I)*G5BL(1,6)=BLL(I)*G6DO 88 II=1,688 BL(2,II)=0.0DO 20 K=1,2DO 20 J=1,620 B(K,J)=B00(K,J)+BL(K,J)E(1,1)=-1/DL*U1+1/DL*U2+BLL(I)*BLL(I)/2E(2,1)=B00(2,2)*W1+B00(2,3)*O1+B00(2,5)*W2+B00(2,6)*O2 CALL TTT(2,6,B,BT)CALL MTMULT(6,2,2,BT,D,CC)CALL MTMULT(6,2,1,CC,E,P1)DO 30 K=1,630 P(K,1)=P(K,1)+P1(K,1)*W(I)*DL10 CONTINUEEFA(N)=-P(1,1)CALL TTT(6,1,P,P2)CALL MTMULT(1,6,6,P2,T,PGT)CALL TTT (1,6,PGT,PG)DO 40 I=1,6II=NI+I-140 PP(II,1)=PP(II,1)+PG(I,1)33 CONTINUERETURNEND************************************************* *** THIS SUBROUTINE IS USED TO SOLVE * *** INCREAMENT DISPLACEMENT BY AN **** CHOLESKY'S METHOD ************************************************** SUBROUTINE JFC(WK,P,X,N,M,NU,UXY)IMPLICIT REAL*8 (A-H,O-Z)DIMENSION A(63,64),WK(63,63),X(63),P(63,1),UXY(10,3) DO 20 I=1,N DO 20 J=1,NA(I,J)=WK(I,J)20 A(I,M)=P(I,1)DO 30 I=1,NUKI=3*(UXY(I,1)-1)+UXY(I,2)A(KI,KI)=A(KI,KI)*10E15A(KI,M)=UXY(I,3)*A(KI,KI)30 CONTINUE*** CALCULATION FIRST ROW OF UPPER UNIT **** TRIANGULAR MATRIX *DO 40 J=2,M40 A(1,J)=A(1,J)/A(1,1)*** CALCULATION OTHER ELEMENTS OF U AND L MATRICES * DO 100 I=2,NJ=IDO 70 II=J,NSUM=0.JM1=J-1DO 60 K=1,JM160 SUM=SUM+A(II,K)*A(K,J)70 A(II,J)=A(II,J)-SUMIP1=I+1DO 90 JJ=IP1,MSUM=0.IM1=I-1DO 80 K=1,IM180 SUM=SUM+A(I,K)*A(K,JJ)90 A(I,JJ)=(A(I,JJ)-SUM)/A(I,I)100 CONTINUE*** SOLVE FOR X(I) BY BACK SUBSTITUTION *X(N)=A(N,N+1)L=N-1DO 120 NN=1,LSUM=0.I=N-NNIP1=I+1DO 110 J=IP1,N110 SUM=SUM+A(I,J)*X(J)120 X(I)=A(I,M)-SUMRETURNEND************************************************* *** THIS SUBROUTINE IS USED TO FORM * *** TRANSFORMANTION MATRIX T ************************************************** SUBROUTINE TT(T,BO,N,CCOS,SSIN)IMPLICIT REAL*8 (A-H,O-Z)DIMENSION T(6,6),BO(20)CCOS=DCOS(BO(N))SSIN=DSIN(BO(N))DO 20 I=1,6DO 20 J=1,620 T(I,J)=0.0T(1,1)=CCOST(1,2)=SSINT(2,1)=-SSINT(2,2)=CCOST(3,3)=1.0T(4,4)=CCOST(4,5)=SSINT(5,4)=-SSINT(5,5)=CCOST(6,6)=1.0RETURNEND************************************************* *** THIS SUBROUTINE IS USED TO FORM LOCAL * *** COORDINATE* ************************************************* SUBROUTINE FLC(NE,M,RS,UI,DU,RN,XY,BO,DLL)IMPLICIT REAL*8 (A-H,O-Z)DIMENSION RS(63,1),UI(63),DU(63),RN(20),BO(20), &XY(21,2),DLL(20)PI=3.1415926DO 10 I=1,MRS(I,1)=0.0UI(I)=0.010 DU(I)=0.0DO 20 I=1,NE20 RN(I)=0.0DO 30 N=1,NEI=NJ=N+1XO=XY(J,1)-XY(I,1)YO=XY(J,2)-XY(I,2)IF(XO.GT.0.0) THENIF(YO.GT.0.0) THENBO(N)=DATAN(YO/XO)ELSEBO(N)=PI*2.-DABS(DATAN(YO/XO))END IFELSEIF(YO.GT.0.0) THENBO(N)=PI-DABS(DATAN(YO/XO))ELSEBO(N)=PI+DABS(DATAN(YO/XO))END IFEND IFDLL(N)=DSQRT(YO*YO+XO*XO)30 CONTINUERETURNEND************************************************* *** THIS SUBROUTINE IS USED TO FORM THE * *** ELEMENT STIFFNESS MATRIX WK AND ASSEMBLE * *** THE TOTAL MATRIX TWK* ************************************************* SUBROUTINE WKK(NE,DLL,RN,BO,TWK,EF,EI)IMPLICIT REAL*8 (A-H,O-Z)REAL*8 K(6,6),K1(6,6),KW(6,6),K0(6,6),GT(6,2),B00(2,6), &BL(2,6),C(2,6),BLL(3),BLT(6,2),KK(6,6),G(2,6),& K3(6,6),K4(6,6),RN(20),DLL(20),BO(20),T(6,6),CC(6,2), & TWK(63,63),WT(6,6),K2(6,6),B00T(6,2),T0(6,6)COMMON/A1/D(2,2)/A2/X(3),W(3)COMMON/A3/X1(20),X2(20),Y1(20),Y2(20),Z1(20),Z2(20) NI=3*(NE+1) DO 91 I=1,NIDO 91 J=1,NI91 TWK(I,J)=0.0 DO 200 N=1,NEDL=DLL(N)U1=X1(N)U2=X2(N)W1=Y1(N)W2=Y2(N)O1=Z1(N)O2=Z2(N)X(1)=0.1127*DLX(2)=0.5*DLX(3)=0.8873*DLW(1)=0.555556/2. W(2)=0.8888889/2. W(3)=0.555556/2. DO 211 I=1,6DO 211 J=1,6K0(I,J)=0.0K1(I,J)=0.0K2(I,J)=0.0K3(I,J)=0.0K(I,J)=0.0KW(I,J)=0.0211 CONTINUED(1,1)=EFD(1,2)=0.0D(2,1)=0.0D(2,2)=EIDO 10 I=1,3B00(1,1)=-1/DLB00(1,2)=0.0B00(1,3)=0.0B00(1,4)=1/DLB00(1,5)=0.0B00(1,6)=0.0B00(2,1)=0.0B00(2,2)=12.*X(I)/(DL**3)-6./DL**2 B00(2,3)=-4./DL+6.*X(I)/(DL**2) B00(2,4)=0.0B00(2,5)=6./(DL*DL)-12.*X(I)/(DL**3) B00(2,6)=-2./DL+6.*X(I)/(DL**2) G(1,1)=0.0G(1,2)=6.*X(I)*X(I)/DL**3-6.*X(I)/DL/dlG(1,3)=1.-4.*x(i)/dl+3.*x(i)*x(i)/dl**2G(1,5)=6.*X(I)/(DL*DL)-6.*X(I)*X(I)/DL**3G(1,6)=-2.*X(I)/DL+3.*X(I)*X(I)/DL**2DO 99 II=1,699 G(2,II)=0.0BLL(I)=G(1,2)*W1+G(1,3)*O1+G(1,5)*W2+G(1,6)*O2 BL(1,1)=0.0 BL(1,2)=BLL(I)*G(1,2)BL(1,3)=BLL(I)*G(1,3)BL(1,4)=0.0BL(1,5)=BLL(I)*G(1,5)BL(1,6)=BLL(I)*G(1,6)DO 88 II=1,6BL(2,II)=0.088 CONTINUECALL TTT(2,6,B00,B00T)CALL MTMULT(6,2,2,B00T,D,CC)CALL MTMULT(6,2,6,CC,B00,KW)DO 20 M=1,6DO 20 J=1,620 K0(M,J)=K0(M,J)+KW(M,J)*W(I)*DL CALLMTMULT(6,2,6,CC,BL,KW)DO 70 M=1,6DO 70 J=1,670 K2(M,J)=K2(M,J)+KW(M,J)*W(I)*DL CALL TTT(2,6,G,GT)CALL MTMULT(6,2,6,GT,G,KW)DO 30 M=1,6DO 30 J=1,630 K1(M,J)=K1(M,J)+KW(M,J)*W(I)*RN(N)*DL CALL TTT(2,6,BL,BLT)CALL MTMULT(6,2,2,BLT,D,CC)CALL MTMULT(6,2,6,CC,B00,KW)DO 40 M=1,6DO 40 J=1,640 K3(M,J)=K3(M,J)+KW(M,J)*W(I)*DL CALLMTMULT(6,2,6,CC,BL,KW)DO 50 M=1,6DO 50 J=1,650 K4(M,J)=K4(M,J)+KW(M,J)*W(I)*DL10 CONTINUEDO 60 I=1,6DO 60 J=1,660 K(I,J)=K0(I,J)+K1(I,J)+K2(I,J)+K3(I,J)+K4(I,J) CALLTT(T,BO,N,CCOS,SSIN)CALL TTT(6,6,T,T0)CALL MTMULT(6,6,6,T0,K,WT)CALL MTMULT(6,6,6,WT,T,KK)IJ=3*(N-1)DO 90 I=1,6II=IJ+IDO 90 J=1,6JJ=IJ+J90 TWK(II,JJ)=TWK(II,JJ)+kK(I,J)200 CONTINUERETURNEND************************************************* SUBROUTINE MTMULT(L,M,N,A,B,C)IMPLICIT REAL*8(A-H,O-Z)REAL*8 A(L,M),B(M,N),C(L,N)DO 13 I=1,LDO 13 K=1,NC(I,K)=0.0DO 13 J=1,M13 C(I,K)=C(I,K)+A(I,J)*B(J,K)RETURNEND************************************************* SUBROUTINE TTT(M,N,A,B)IMPLICIT REAL*8 (A-H,O-Z)REAL*8 A(M,N),B(N,M)DO 15 I=1,NDO 15 J=1,MB(I,J)=0.015 B(I,J)=A(J,I)RETURNEND。