动手玩转Arduino(第二期)之各种传感器介绍
Arduino 颜色传感器

白平衡就是告诉系统什么是白色。从理论上讲,白色是由等量的红色、绿色和蓝色混合而成的;但实际上,白色中的三原色并不完全相等,并且对于TCS230的光传感器来说,它对这三种基本色的敏感性是不相同的,导致TCS230的RGB输出并不相等,因此在测试前必须进行白平衡调整,使得TCS230对所检测的“白色”中的三原色是相等的。进行白平衡调整是为后续的颜色识别作准备。在本装置中,白平衡调整的具体步骤和方法如下:将空的试管放置在传感器的上方,试管的上方放置一个白色的光源,使入射光能够穿过试管照射到TCS230上;根据前面所介绍的方法,依次选通红色、绿色和蓝色滤波器,分别测得红色、绿色和蓝色的值,然后就可计算出需要的三个调整参数。
g_SF[1] = 255.0/ g_array[1] ; //G Scale factor
g_SF[2] = 255.0/ g_array[2] ; //B Scale factor
Serial.println(g_SF[0]);
Serial.println(g_SF[1]);
Serial.println(g_SF[2]);
{
if(Level01 != 0)
Level01 = HIGH;
if(Level02 != 0)
Level02 = HIGH;
digitalWrite(S2, Level01);
digitalWrite(S3, Level02);
}
void TSC_Count()
{
g_count ++ ;
}
void TSC_Callback()
#define S0 6 // Please notice the Pin's define
Arduino 教程--第三十五课 Arduino 湿度传感器

Serial.print ("Heat index: ");
Serial.print (hic);
Serial.print (" *C ");
Serial.print (hif);
Serial.println (" *F");
}
代码说明
DHT22传感器具有四个端子连接到电路板的端子(Vcc,DATA,NC,GND),如下:
在本例中,你将学习如何将此传感器与Arduino UNO一起使用。室温和湿度将打印到串口监视器上。
DHT-22传感器
连接很简单。左边的第一个引脚为3-5V电源,第二个引脚连接到数据输入引脚,最右边的引脚接地。
技术细节
电源- 3-5V
最大电流- 2.5mA
湿度- 0-100%,精确度为2-5%
温度- 40至80°C,精确度为±0.5°C
// Connect pin 1 (on the left) of the sensor to +5V
// NOTE: If using a board with 3.3V logic like an Arduino Due connect pin 1
// to 3.3V instead of 5V!
}
// Compute heat index in Fahrenheit (the default)
float hif = puteHeatIndex(f, h);
// Compute heat index in Celsius (isFahreheit = false)
float hic = puteHeatIndex(t, h, false);
Arduino控制URM37V3.2超声波测距传感器
下面是使用传感器的 PWM 输出读取距离数据,首先需要设置超声波的工作模式,根据手册我们可以看到需要设置为第三 工作模式。这里需要用到 RS232 转 TTL 模块或 USB 转 TTL 模块,如果你有 Arduino 也行(当然一定是控制芯片是直插式 的才行)。
我们就用 Arduino 来代替 USB 转 TTL 模块,来配置超声波传感器,具体做法如下:
void setup() { Serial.begin(9600); pinMode(ledpin,OUTPUT); digitalWrite(ledpin,LOW); delay(200);
}
void loop() {
flag=true; for(int i=0;i<4;i++) {
Serial.print(DMcmd[i],BYTE);//发送超声波测距命令 }
delay(75); //一个延时
while(flag)
{ if(Serial.available()>0) //查询串口有无数据 { int header=Serial.read(); //0x22 开始接收距离数据 int highbyte=Serial.read();//距离数据高 8 位 int lowbyte=Serial.read();//距离数据低 8 位 int sum=Serial.read();//sum 校验和
//
dela=true;
for(int i=0;i<4;i++)//温度命令发送 {
Serial.print(DMcmd[i],BYTE); }
delay(50); //延时 50 ms
while(flag) {
if(Serial.available()>0)//判断串口有无返回数据 {
Arduino认知

Arduino认知这学期我们接触了一个新的课程——Arduino。
看着很难懂的一个名称,其实内容很有趣,过程很精彩,并且与上学期学的C语言有一定的相通之处,这给我们的学习过程减轻了很多难处。
这个学科我们一共做了11个实验,分别是光敏电阻、PWN脉宽调制、火焰传感器、4*4数码矩阵、温度传感器、4位数码管显示、人体传感器、RGB三色基LED、舵机控制、LCD1602、超声波测距。
每一个实验都都有不同的实验结果,会给我们带来不一样的体验,给我们增加了很多新奇的体验。
比如说,光敏电阻会因为光感的强弱来改变电阻的闪动频率;温度传感器可以检测到温度,改变呈现给我们数值;4位数码管显示器也很有意思,在程序上输入你想在数码管上显示的字母、数字,待程序完成并执行后就可以在数码管的液晶屏上看到你想呈现的东西;舵机控制的实验,可以看到舵机的螺旋桨转动;RGB三色基LED会出现红绿蓝三色接替闪烁,等等。
每完成一个实验,看到相应的实验结果就满满的成就感。
这里面的实验每一个都需要对应的程序来实现,所以我们每做一个实验的第一步就是敲程序,程序或多或少会有些枯燥,但一想到可以看不同的实验现象就会活力满满。
接下来就具体介绍以下Arduino的来源、作用及实用工具等。
Arduino是源于意大利的一套开源硬件开发平台,他的的作用是能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。
板子上的微控制器可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进微控制器。
特色:可开放源代码的电路图设计,程序开发接口免费下载,也可依个人需求自己修改。
是使用低价格的微处理控制器(AVR系列控制器),可以采用USB接口供电,不需外接电源,也可以使用外部9VDC输入。
Arduino支持ISP在线烧,可以将新的“bootloader”固件烧入AVR芯片。
有了bootloader之后,可以通过串口或者USB to RS232线更新固件。
Arduino 的颜色传感器代码和连接[共2页]
![Arduino 的颜色传感器代码和连接[共2页]](https://img.taocdn.com/s3/m/de9e21a402768e9950e7386f.png)
传感器实战全攻略
digitalWrite(ledPin,HIGH);
}else {
Serial.println("WHITE");
digitalWrite(ledPin,LOW);
}
delay(50);
}
这段代码与之前第134页的“Arduino的巡线传感器代码和连接”中的代码类似。
测试一下不同的材质。
你能找出一种我们人类看着是黑色,而传感器认为是白色的材质吗?
项目:彩虹的所有颜色
颜色传感器测量物体表面的颜色,它返回红色、绿色和蓝色的值(见图7-19)。
对于三基色(红、绿、蓝)而言,颜色传感器顶部的光电二极管有一个颜色滤光镜,每种颜色值就像模拟电阻传感器一样被读取出来。
图7-19
颜色传感器
本实验会输出颜色传感器所看到光线的RGB(Red,红色;Green,绿色;Blue,蓝色)值,每一个值代表三基色中的一个颜色。
你可以使用它制作变色龙半球体(“第143页的“测试项目:变色龙半球体”)。
不同颜色对应特定波长的光线。
例如,绿色是555nm(通常使用纳米描述光线波长的大小)或540太赫兹(THz,光线的频率)。
某些动物可以看到人眼看不到的光线,例如,红外线或紫外线。
对于人类来说,三基色是最基本的颜色,因为人眼只能看到红色、绿色和蓝色。
视网膜上有三种类型的视锥细胞,分别对这三种波长的光线敏感。
Arduino的颜色传感器代码和连接
图7-20展示了Arduino连接颜色传感器的电路图。
搭建完毕后运行案例7-8中的程序。
138。
Arduino 之模拟传感器使用
Arduino 之模拟传感器使用所谓模拟传感器是指传感器通电过后返回的是一个模拟的数值,那我们先了解下数字信号和模拟信号的区别:
一、模拟信号
模拟信号是指信息参数在给定范围内表现为连续的信号。
或在一段连续的时间间隔内,其代表信息的特征量可以在任意瞬间呈现为任意数值的信号。
比如正弦函数、指数函数等。
从自然界感知的大部分物理量都是模拟性质的,如速度、压力、温度、声音、重量以及位置等都是最常见的物理量。
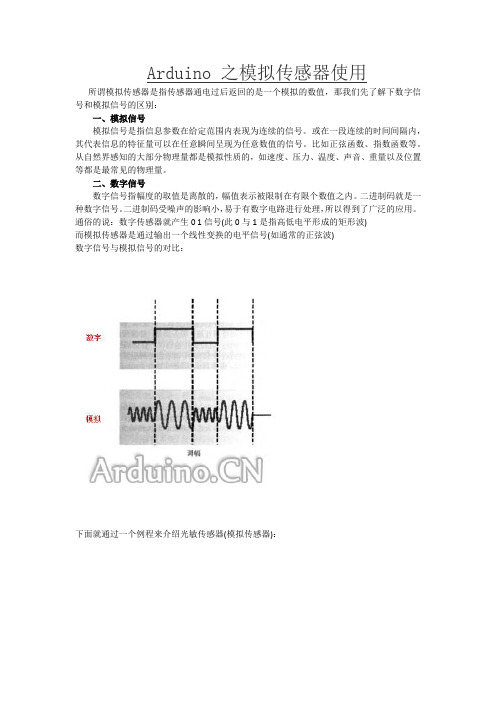
二、数字信号
数字信号指幅度的取值是离散的,幅值表示被限制在有限个数值之内。
二进制码就是一种数字信号。
二进制码受噪声的影响小,易于有数字电路进行处理,所以得到了广泛的应用。
通俗的说:数字传感器就产生0 1信号(此0与1是指高低电平形成的矩形波)
而模拟传感器是通过输出一个线性变换的电平信号(如通常的正弦波)
数字信号与模拟信号的对比:
下面就通过一个例程来介绍光敏传感器(模拟传感器):
第一步:打开IED,找到例程AnologReadSerial,本例程用来读一个模拟传感器的读数字,然后用串口对输出值进行监视。
第二步:下载程序到arduino主控板,传感器输出端接到A0,然后连接正负接线端,打开串口便可观看测出的数据。
PS:arduino主控板上A0---A5是指ADC输入,所谓ADC值模数变换器,将读入的模拟值进行处理,将模拟数转换为数字,便于用户对数据进行处理,因为atmea328ADC是一个10位的寄存器,2的10次方=1024,所以当arduino读入值为默认的电压最大值5V时,analogRead 读到的值就是1024.。
Arduino传感器详解与应用

• void loop()
•{
•
buttonStateA = digitalRead(ButtonPinA); //读取A模块
•
if (buttonStateA == HIGH && brightness != 255)
•
{ //当A模块检测到信号,且亮度不是最大时,亮度值增加
•
brightness ++;
• int Led=13;//定义LED 接口 int buttonpin=3; //定义倾斜开关传感器接口
• int val;//定义数字变量val • void setup() •{ • pinMode(Led,OUTPUT); //定义LED 为输出接口 • pinMode(buttonpin,INPUT); //定义倾斜开关传感器为输出接口 •} • void loop() •{ • val=digitalRead(buttonpin); //将数字接口3的值读取赋给val • if(val==HIGH) //当倾斜开关传感器检测有信号时,LED 亮 •{ • digitalWrite(Led,HIGH); •} • else •{ • digitalWrite(Led,LOW); •} •}
{ pinMode(buzzer,OUTPUT);//设置数字IO脚模式,OUTPUT为输出 }
void loop()
{ unsigned char i,j;//定义变量 for(i=0;i<80;i++)//辒出一个频率的声音 {
digitalWrite(buzzer,HIGH); //发声音 delay(1); //延时1ms digitalWrite(buzzer,LOW); //不发声音 delay(1); //延时ms }
Arduino教程及简明例程
数字输出Arduino教程一:11 Comments ?Arduino教程,。
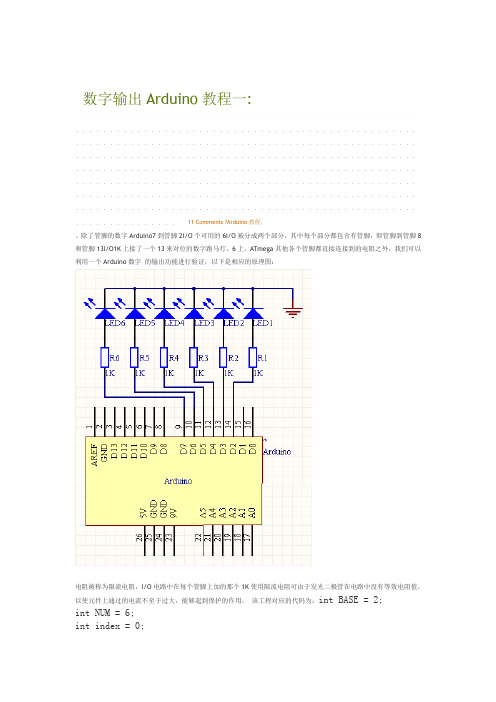
除了管脚的数字Arduino7到管脚2I/O个可用的6I/O被分成两个部分,其中每个部分都包含有管脚,即管脚到管脚8和管脚13I/O1K上接了一个13来对位的数字跑马灯,6上。
ATmega其他各个管脚都直接连接到的电阻之外,我们可以利用一个Arduino数字的输出功能进行验证,以下是相应的原理图:电阻被称为限流电阻,I/O电路中在每个管脚上加的那个1K使用限流电阻可由于发光二极管在电路中没有等效电阻值,以使元件上通过的电流不至于过大,能够起到保护的作用。
该工程对应的代码为:int BASE = 2;int NUM = 6;int index = 0;void setup(){++) BASE; = i (int for i + BASE < i NUM;{pinMode(i, OUTPUT);}}void loop(){for (int i = BASE; i < BASE + NUM; i ++) {digitalWrite(i, LOW);}digitalWrite(BASE + index, HIGH);index = (index + 1) % NUM;delay(100);}2管脚I/O数字Arduino下载并运行该工程,连接在上的发光二极管会依次点亮7到管脚0.1秒,然后再熄灭:1 / 28这个实验可以用来验证数字I/O输出的正确性。
Arduino上一共有十二个数字I/O管脚,我们可以用同样的办法验证其他六个管脚的正确性,而这只需要对上述工程的第一行做相应的修改就可以了:int BASE = 8;01SEPArduino教程二: 数字输入3 Comments ?Arduino, 教程在数字电路中开关(switch)是一种基本的输入形式,它的作用是保持电路的连接或者断开。
Arduino从数字I/O管脚上只能读出高电平(5V)或者低电平(0V),因此我们首先面临到的一个问题就是如何将开关的开/断状态转变成Arduino 能够读取的高/低电平。
Arduino-教程-第37课-Arduino-水位检测器传感器
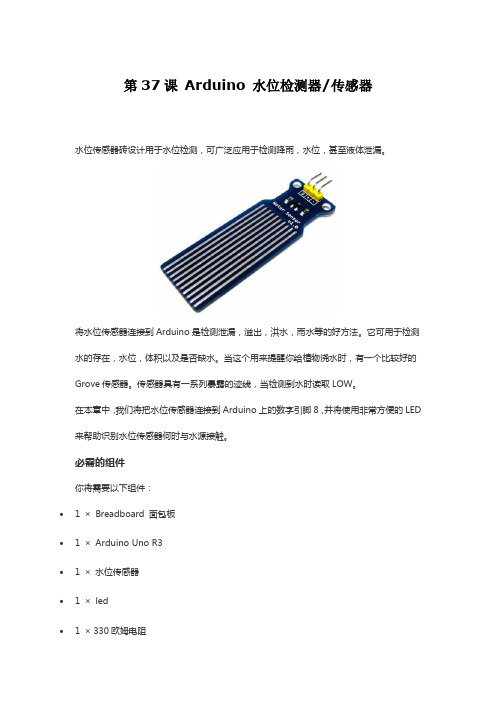
第37课Arduino 水位检测器/传感器水位传感器砖设计用于水位检测,可广泛应用于检测降雨,水位,甚至液体泄漏。
将水位传感器连接到Arduino是检测泄漏,溢出,洪水,雨水等的好方法。
它可用于检测水的存在,水位,体积以及是否缺水。
当这个用来提醒你给植物浇水时,有一个比较好的Grove传感器。
传感器具有一系列暴露的迹线,当检测到水时读取LOW。
在本章中,我们将把水位传感器连接到Arduino上的数字引脚8,并将使用非常方便的LED 来帮助识别水位传感器何时与水源接触。
必需的组件你将需要以下组件:• 1 ×Breadboard 面包板• 1 ×Arduino Uno R3• 1 ×水位传感器• 1 ×led• 1 × 330欧姆电阻程序按照电路图连接面包板上的组件,如下图所示。
草图在计算机上打开Arduino IDE软件。
使用Arduino语言进行编码控制你的电路。
通过单击“New”打开一个新的草图文件。
Arduino代码代码说明水位传感器具有三个端子:S,Vout(+)和GND(-)。
按如下所示连接传感器:•将+Vs连接到Arduino板上的+5v。
•将S连接到Arduino板上的数字引脚8。
•将GND连接到Arduino上的GND。
•将LED连接到Arduino板上的数字引脚9。
当传感器检测到水时,Arduino上的引脚8变为LOW,然后Arduino上的LED亮起。
结果当传感器检测到水时,你会看到指示LED灯亮起。
Arduino温度传感器全系列使用详解–Arduino实验室

Arduino温度传感器全系列使用详解–Arduino实验室温度是我们经常接触到的物理量,能够被我们所直观的感受得到,例如天气凉了需要增添衣物,吃的食物太烫需要吹一吹,同时也需要对温度精确的测量,例如人类的正常体温是37.5℃,一个大气压下纯水沸腾时的温度是100℃,都需要我们去做实验来找出其中的科学。
下面我们将详细讲解几种常用的温度传感器,并利用Arduino来实现温度的测量,包括热敏电阻、LM35、DS18B20、DHT11和热电偶。
1.热敏电阻1.1 热敏电阻简介热敏电阻是电阻值随温度变化的半导体传感器,其典型特点是阻值对温度非常敏感,在不同的温度下会表现出不同的电阻值,从而根据表现的电阻值可逆推导得到其所处的环境温度值。
具有灵敏度高、体积小、热容量小、响应速度快、价格低廉等优点。
按照温度系数不同,可分为正温度系数热敏电阻(PTC)、负温度系数热敏电阻(NTC)和临界负温度系数热敏电阻(CTR)。
PTC随着温度升高,表现出的电阻值越大; NTC随着温度升高,表现出的电阻值越低;CTR具有负电阻突变特性,在某一温度下,电阻值随温度的增加急剧减小,具有很大的负温度系数。
由于具有不同的特性,热敏电阻的用途也是不同的。
PTC一般用作加热元件和过热保护;NTC一般用于温度测量和温度补偿;CTR一般用于温控报警等应用。
NTC的测温范围为-60~+300℃,标称阻值一般在1Ω至100MΩ之间,采用精密电阻和热敏电阻组合可扩大测量温度线性范围。
图1为NTC实物图,图中所示的为NTC 10D-9和NTC 5D-7。
NTC表示为负温度系数的热敏电阻,10D-9和5D-7代表其型号,10D-9代表了常温(25摄氏度)阻值10欧姆,直径9毫米,5D-7代表了常温(25摄氏度)阻值5欧姆,直径7毫米。
除了图1所示的形状之外,热敏电阻制成的探头有珠状、棒杆状、片状和薄膜等,封装外壳有玻璃、镍和不锈钢管等套管结构,如图2所示。
arduino三路循迹原理 -回复
arduino三路循迹原理-回复Arduino三路循迹原理中括号内的主题是“Arduino三路循迹原理”,在本文中,我们将逐步回答关于这个主题的问题,以帮助理解Arduino三路循迹的工作原理。
1. 什么是Arduino三路循迹技术?Arduino三路循迹技术是一种基于Arduino开发板的机器人技术,通过使用三个循迹传感器来检测机器人运动路径上的黑线,并相应地控制机器人的行动。
这种技术常用于线迹自动导航机器人、地板扫地机器人等自动化应用。
2. 循迹传感器是什么?循迹传感器是一种用于检测黑线的装置。
一般情况下,循迹传感器由一个红外发射二极管和一个红外接收二极管组成。
红外发射二极管会发射出红外光线,而当这些光线被黑线吸收时,会导致接收二极管所产生的电流减小。
通过测量接收二极管的电流变化,我们可以判断传感器是否位于黑线上。
3. Arduino如何使用循迹传感器?首先,需要将循迹传感器与Arduino开发板连接起来。
一般来说,循迹传感器会有两个引脚,一个是VCC(电源正极)引脚,一个是OUT(输出)引脚。
将循迹传感器的VCC引脚连接到Arduino的5V引脚,将OUT引脚连接到一个数字引脚上,例如数字引脚2。
然后,我们需要在Arduino代码中编写相应的程序逻辑来读取循迹传感器的输出值。
读取这些值可以使用Arduino的analogRead()函数,该函数可以返回一个介于0到1023之间的数值,代表了传感器的输出电压。
4. 如何理解循迹传感器的输出值?循迹传感器的输出值可以用于判断传感器的位置。
当传感器位于黑线上时,该输出值会较低,当传感器不在黑线上时,该输出值会较高。
通过调整Arduino程序的阈值(threshold),我们可以设置一个适当的阈值来判断传感器是否在黑线上。
为了更好地控制机器人的行动,一般情况下我们会使用PID(比例-积分-微分)控制算法。
PID算法可以根据循迹传感器的输出值来调整机器人的行动,使其能够保持在黑线上运动。
基于Arduino的多重手势识别传感器的设计与实现

基于Arduino的多重手势识别传感器的设计与实现1. 引言1.1 背景介绍手势识别技术是一种基于人体动作的智能交互方式,随着智能设备的普及和人机交互方式的不断创新,手势识别技术越来越受到重视。
传统的手势识别技术主要基于摄像头或者红外传感器,但存在着受环境光影响、精度低等问题。
基于Arduino的多重手势识别传感器的设计与实现成为了一个备受关注的领域。
随着Arduino技术的不断发展,基于Arduino的手势识别传感器已经成为一种新兴的研究方向。
通过灵活的编程和丰富的传感器模块,可以实现更加灵活、精准的手势识别。
而多重手势识别传感器的设计更进一步提高了识别的准确性和稳定性,具有更广泛的应用前景。
本文将详细介绍基于Arduino的多重手势识别传感器的设计与实现过程,通过对传感器的工作原理、系统实现步骤以及实验结果的分析,旨在为手势识别技术的研究和应用提供一定的参考与借鉴。
1.2 研究目的研究目的是通过设计与实现基于Arduino的多重手势识别传感器,探索一种新型的手势识别技术以提高用户与智能设备之间的交互体验。
具体目的包括:1.实现对多种手势的高效识别,使用户能够通过不同手势来与设备进行交互操作;2.提高手势识别传感器的准确性和稳定性,以确保识别结果的可靠性和稳定性;3.探索基于Arduino的手势识别传感器设计方案,为更多研究者和开发者提供参考和借鉴;4.深入研究手势识别技术的原理和实现方法,为未来手势识别技术的发展提供基础和支持。
通过本研究,旨在推动手势识别技术的发展,拓展其应用领域,提高智能设备与用户之间的交互效率和舒适度。
1.3 研究方法本研究采用了以下方法进行多重手势识别传感器的设计与实现。
我们通过文献调研和分析,了解了当前手势识别技术的发展现状和应用情况,为后续研究提供了理论支持。
我们确定了在Arduino平台上实现多重手势识别的设计方案,并进行了系统结构的规划和设计。
在设计过程中,我们充分考虑了传感器的布局、数据传输、信号处理等关键因素,确保系统具有较高的准确性和稳定性。
基于Arduino的多重手势识别传感器的设计与实现

基于Arduino的多重手势识别传感器的设计与实现随着科技的不断发展,人机交互技术也在不断创新和改进。
手势识别技术就是一种十分引人注目的交互方式。
传统的手势识别技术多采用摄像头或者红外传感器等硬件设备,但是这些技术都存在一些问题,比如受到环境光影响、成本较高等。
本文将介绍一种基于Arduino的多重手势识别传感器的设计与实现,该技术不仅成本低廉,而且能够准确识别多种手势动作,具有很高的实用价值。
一、设计原理1. 硬件设计原理该手势识别传感器主要由Arduino开发板、众多红外传感器及面包板等硬件组成。
红外传感器的作用是用来接收人体手势发出的红外光信号,并将信号传输到Arduino开发板。
Arduino开发板负责接收红外传感器传回的信号,并进行信号分析及判别,从而识别手势动作。
通过面包板将Arduino开发板与众多红外传感器及其他硬件连接在一起。
2. 软件设计原理在软件设计方面,通过C语言程序设计控制Arduino开发板,并实现对红外传感器信号的处理和手势识别算法的实现。
主要包括信号采集、信号处理、手势识别等功能。
通过硬件与软件的联合设计,实现对多重手势的准确识别。
二、实现步骤1. 硬件实现通过面包板将Arduino开发板与多个红外传感器连接在一起。
在连接过程中,需要注意每个红外传感器的接线是否正确,并保证整个电路连接无误。
然后,将硬件连接至计算机,开始进行后续的软件设置。
2. 软件实现在软件实现中,首先需要准备Arduino开发环境,并将需要的C语言程序上传至开发板上。
程序的设计主要包括信号采集、信号处理、手势识别等功能。
信号采集需要定时对红外传感器接收的信号进行采集,并将采集到的信号传输至信号处理部分。
信号处理部分主要是对采集到的信号进行滤波处理,保证信号的稳定性;最后就是手势识别功能的设计,通过分析处理后的信号,识别出具体的手势动作。
三、实现效果通过以上的设计与实现,我们成功实现了基于Arduino的多重手势识别传感器。
动手玩转Arduino(第二期)之各种传感器介绍
动手
• 实验各种模拟传感器 • 对RGB LED进行控制 • 分享
Thank you
动手玩转Arduino (二 )
Arduino北京俱乐部
LED基本电路
电阻
LED
电源(正/负)
LED控制代码
动手
• • • • • 使用Arduino和传感器扩展板 使用Arduino的9,10,11三个引脚 使用三个LED和1K的电阻 通过程序进行控制 讨论
彩色LED
• 红/绿/蓝 三原色 • 根据公共端的不同有共阳/共阴两种
– pin: 模拟输入引脚 A0, A1, A2, A3, A4, A5 – 返回值: 0-1024 (10位精度)
动手
• 通过读取电位器的值来控制LED灯的亮度
300度 旋转角度传感器
多圈 旋转角度传感器
60行程 滑动电位器 推子
游戏杆 控制杆 JoyStick
模拟温度传感器
光线传感器
动手
• 更换RGB LED • 用Arduino程序混色 • 讨论
模拟信号
• 模拟信号的值可以连续变化 • 9V电池就是一种模拟器件,因为它的输出电压并不精确地 等于9V,而是随时间发生变化,并可取任何实数值。 • 光照强度、温度、湿度等也都是模拟信号
Arduino中的模拟输出
• analogWrite(pin, value) • pin为Arduino上的PWM引脚
– 3, 5,பைடு நூலகம்6, 9, 10, 11
• value取值0-255
• PWM
– 实现模拟信号的数字化方法
动手
• Arduino控制LED淡入淡出效果
动手
• 实现全彩的混色
Arduino传感器详解与应用
void loop()
{ unsigned char i,j;//定义变量 for(i=0;i<80;i++)//辒出一个频率的声音 {
digitalWrite(buzzer,HIGH); //发声音 delay(1); //延时1ms digitalWrite(buzzer,LOW); //不发声音 delay(1); //延时ms }
8、魔术光杯(一对)
信号 LED控制
• 水银开关多加了一个独立的LED,两个可以组成 魔术光杯
原理
• 将魔术光杯其中一个模块S脚接数字脚7,LED控 制接数字脚5(PWM功能),另一个模块S脚接数 字脚4,LED控制接数字脚6.
• 现象:当一个水银开关倾倒时,自己的灯会越来 越暗,另一个灯会越来越亮,像心电感应一样。
•
analogWrite(LedPinB, 255 - brightness); // B慢漸亮
•
delay(25);
•}
• //两者相加的和为255,亮度此消彼涨的关系
9、震动开关
编程原理
• 震动模块和数字13 接口自带LED 搭建简单电路, 制作震动闪光器。
• 利用数字13 接口自带的LED,将震动传感器接入 数字3接口,当震动传感器感测到有震动信号时, LED 闪烁发光。
• delayMicroseconds(120);//延时120微秒
• digitalWrite(buzzer,LOW);//不发声音 • delayMicroseconds(120);//延时120微秒 •}
•}
3、有源蜂鸣器
Arduino的光敏传感器和超声波测距传感器测试代码

Arduino的光敏传感器和超声波测距传感器测试代码光敏传感器测试代码使⽤的是⼀个未知名4pin模块, 4pin依次为Vcc, Gnd, DO, AO, 板载⼀个可调电阻以及⼀个LED, 调节电阻⼤⼩, 可以控制LED亮灭和DO输出变化对光亮的灵敏度. AO是模拟输出, 将AO接⾄A5⼝.#define AD5 A5 //定义模拟⼝A5#define LED 13 //定义数字⼝13int intensity = 0;//光照度数值void setup() {pinMode(LED, OUTPUT);Serial.begin(9600);}void loop() {intensity = analogRead(AD5);Serial.print("Intensity = ");Serial.println(intensity);if (intensity > 200) {digitalWrite(LED, LOW);} else {digitalWrite(LED, HIGH);}delay(500); // 500ms}超声波测距传感器测试代码超声波测距使⽤的是4pin的HC-SR04模块, 4pin依次为Vcc, Trig, Echo, Gnd, 将Trig和Echo分别接开发板的7和6脚const int TrigPin = 7;const int EchoPin = 6;float cm;void setup() {Serial.begin(9600);pinMode(TrigPin, OUTPUT);pinMode(EchoPin, INPUT);}void loop() {digitalWrite(TrigPin, LOW); //低⾼低电平发⼀个短时间脉冲去TrigPindelayMicroseconds(2);digitalWrite(TrigPin, HIGH);delayMicroseconds(10);digitalWrite(TrigPin, LOW);cm = pulseIn(EchoPin, HIGH); //回波时间Serial.print("Echo:");Serial.print(cm);cm = (int(cm * 100.0 / 58.0)) / 100.0; //保留两位⼩数Serial.print(" Distance:");Serial.print(cm);Serial.print("cm");Serial.println();delay(1000);}。
arduino超声波 舵机 平衡

arduino超声波舵机平衡Arduino超声波舵机平衡引言:Arduino是一种开源的单片机平台,广泛应用于各种电子项目中。
超声波传感器和舵机作为Arduino常用的模块之一,可以实现许多有趣的功能。
本文将介绍如何利用Arduino、超声波传感器和舵机实现平衡功能。
一、超声波传感器的原理和应用:超声波传感器是一种测量距离的装置,其原理是利用超声波在空气中的传播速度来测量物体与传感器之间的距离。
超声波传感器在许多领域有着广泛的应用,比如智能车、距离测量等。
二、舵机的原理和应用:舵机是一种可以控制角度的电机,其原理是通过控制电机的PWM信号来调整舵机的位置。
舵机在机器人、遥控模型等领域有着重要的应用,可以实现精确的角度控制。
三、平衡功能的设计思路:基于Arduino、超声波传感器和舵机,我们可以设计一个平衡功能。
其主要思路是利用超声波传感器测量到地面距离,然后根据距离的变化来控制舵机的角度,实现平衡功能。
四、系统硬件设计:1. Arduino Uno开发板:作为控制主板,负责接收超声波传感器的信号并控制舵机的角度。
2. 超声波传感器:用于测量地面距离,通常连接到Arduino的数字引脚。
3. 舵机:用于控制平衡,通常连接到Arduino的PWM引脚。
五、系统软件设计:1. 初始化:设置超声波传感器和舵机的引脚。
2. 测量距离:利用超声波传感器测量地面距离,并将结果保存在变量中。
3. 控制舵机:根据测量到的地面距离,通过设定的算法计算出舵机应该调整的角度,并将角度值发送给舵机。
4. 循环运行:不断重复步骤2和步骤3,实现平衡功能。
六、实验结果与分析:经过实际测试,我们成功实现了基于Arduino、超声波传感器和舵机的平衡功能。
当地面距离发生变化时,舵机能够根据算法计算出应调整的角度,并迅速调整到新的平衡位置。
七、结论:本文介绍了如何利用Arduino、超声波传感器和舵机实现平衡功能。
通过测量地面距离和控制舵机的角度,我们成功实现了一个简单的平衡系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• value取值0-255
• PWM
– 实现模拟信号的数字化方法
动手
• Arduino控制LED淡入淡出效果
动手
• 实现全彩的混色
模拟输入
• 通常基于分压原理 • 电位器 • 电子积木
– 300度 旋转角度传感器
Arduino中的模拟输入
• analogRead(pin)
动手玩转Arduino (二 )
Arduino北京俱乐部
LED基本电路
电阻
LED
电源(正/负)
LED控制代码
动手
• • • • • 使用Arduino和传感器扩展板 使用Arduino的9,10,11三个引脚 使用三个LED和1K的电阻 通过程序进行控制 讨论
彩色LED
• 红/绿/蓝 三原色 • 根据公共端的不同有共阳/共阴两种
动手
• 实验各种模拟传感器 • 对RGB LED进行控制 • 分享
Thank you
– pin: 模拟输入引脚 A0, A1, A2, A3, A4, A5 – 返回值: 0-1024 (10位精度)
动手
• 通过读取电位器的值来控制LED灯的亮度
300度 旋转角度传感器
多圈 旋转角度传Leabharlann 器60行程 滑动电位器 推子
游戏杆 控制杆 JoyStick
模拟温度传感器
光线传感器
动手
• 更换RGB LED • 用Arduino程序混色 • 讨论
模拟信号
• 模拟信号的值可以连续变化 • 9V电池就是一种模拟器件,因为它的输出电压并不精确地 等于9V,而是随时间发生变化,并可取任何实数值。 • 光照强度、温度、湿度等也都是模拟信号
Arduino中的模拟输出
• analogWrite(pin, value) • pin为Arduino上的PWM引脚
声音传感器
Sharp 红外距离传感器
• 30cm, 80cm, 150cm, 5.5m
三轴 加速度传感器
FlexiForce压力传感器
• 1 lb, 25 lb, 100 lb
FSR系列压力传感器
• 压力1-10kG • 尺寸和外形不同
弯曲传感器
• 单向,双向
拉伸 传感器
• 4 inch, 6 inch