乐高机器人认识零件课件
乐高机器人课件
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、认识NXT主要配件,并将其与RCX核心配件作比较,学习和掌握新型乐高机器人;2、搭建蓝牙机器人;3、知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMS NXT与RCX的比较1、处理器由8位升到32位丹麦乐高(LEGO)将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT”。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而NXT配备32位处理器等,提高了性能。
表格1列出RCX和NX T的比较。
图1:安装4个传感器和3个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的4种传感器全家福5、改进了编程软件NXT程序用软件“R OBOLAB ,跟ROBOLAB原来的版本一样,是基于NI LabVIEW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近400个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS为“Windows2000”以上和“Mac OS X”。
图5:乐高网站给出的ROBOLAB 的样图,跟以前版本相比,变化较大二、快速认识NXT1、按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“My Files我的文件”、“Try me测试”、“Settings设置”、“Blue tooth蓝牙”、“View查看”、“NXT Program NXT程序”。
《乐高机器人介绍》PPT课件
3、机器人课程涉及到的学科 4、初中机器人课程特点 5、主要机器人器材产品介绍
41
2
精选ppt
2
我校初中机器人教学
1、开设校本课程
0 0 1 1 0 0 1 0 1 0 1 0 1 1 0 1 0 0 0 1 0 1 0 0 1 0 1 1
2、参加各类竞赛
•2005年
•2006年 等奖
•2007年 等奖
机0 0 1 器1 0 人0 1 的0 1 动0 1 作0 1 。1 0 旋1 0 转0 0 传1 0 感1 0 器0 1 可0 1 以1 控制角度或者完全旋转(可以
加/减一度)。如果你让它旋转180度,那结果就是它转了半个
圈。 你会通过控制内置在马达中的旋转传感器来让每个马达以不
1 同的速度来旋转(通过在软件中设置不同的功率参数来实现)
超声波传感器检测距离的单位可以是厘米或者英寸。它可以
检测的距离从0到255里面,精度是正负3厘米。
超声波传感器使用的技术和蝙蝠很像。它通过计算声音返回
使用的时间来计算距离。大的表面坚硬的物业是最容易辨认的 。软织物、表面弯曲的物体(比如球)或者很薄、很小的物体 比较难辨认。
1 注意:在同一个房间里面的两个或多个超声波传感器可能会
3,分析出一个最适合完成任务的算法。
4,用程序语言描述出算法。 5、将编好的程序写入机器人的大脑中(控制器)。
1 6、调试机器人并发现问题。
2 7、根据出现的问题进行必要的程序的修改结构的修改甚至算
4 法的修改。
精选ppt
16
5、完成项目
一些常规练习项目介绍:
10 0 、1 1 轨0 0 迹1 0 机1 0 器1 0 人1 1 0 1 0 0 0 1 0 1 0 0 1 0 1 1 7、蟑螂机器人
乐高机器人简单讲义
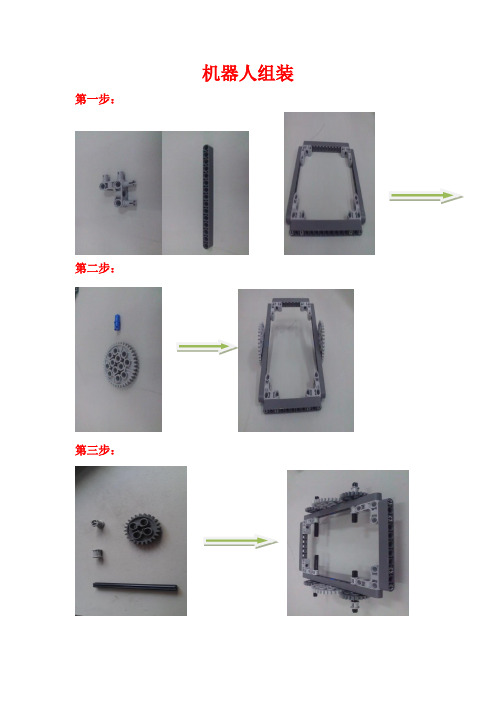
机器人组装第一步:第二步:第三步:第四步:第五步:第六步:第七步:第九步:第十步:NXT控制器软件面板: A B C1 2 3 4NXT智能积木块有三个输出端口,分别为A、B、C,可以连接电机和灯泡。
NXT有四个输入端口1、2、3、4,连接不同的传感器,通过转换器可连接RCX系列传感器。
菜单栏工具栏1.模块面板程序名字2.编程区面板基本面版完整面板自定义面3.控制面板4.参数设置面板常用面板介绍完整面板介绍可以设置A、B、C三个输出端口连接方式,电机输出方向、能量级别和延续时间等。
记录A、B、C三个端口输出动作、可以设置记录时间,然后通过“播放”功能,将刚才NXT 执行的动作复制出来。
可以显示图像和文本,我们可以通过将“数字转换为文本”功能,将电机和传感器的数据实时显示在NXT屏幕上。
有时间和传感器等待,包括触动传感器、声音传感器、光电传感器和超声波传感器等待。
包括“无限循环、时间循环、传感器循环、次数循环和逻辑判断循环”。
通过程序下载声音文件到NXT,并保存在“sound files”文件中,可以选择软件自带的文件,也可以自己来编写。
分支条件有传感器和参数值判断,传感器分支包括“触动、声音、光电等”,参数值分支包括“数字判断、逻辑判断和文本判断”。
包含“常用面板”里所有的功能模块。
输出功能模块,包括单电机、灯泡、发送信息(通过蓝牙)、声音和NXT显示器输出模块。
可以设置NXT传感器,RCX传感器、计时器传感器、NXT按钮和接收信息。
包括“等待、循环、分支”结构功能模块和停止输出模块。
可以定义变量,能进行数据运算,包括加、减、乘、除、大小、范围和逻辑判断。
包括文本模块、数字转换文本模块、保持激活模块、文件存储模块、校准模块、重置电机模自定义面板:控制面板介绍:1. 点击弹出NXT 窗口,能查看NXT 连接状态、可用内存空间、电池电量和固件版本等信息。
2. 此按钮下载程序到NXT ,通过人为操作才能运行程序。
2024版乐高机器人介绍PPT课件
2024/1/26
8
传感器类型及其作用
触觉传感器
检测机器人的接触和碰 撞,用于避障、抓取物
体等。
2024/1/26
光电传感器
检测光线强度和颜色, 用于环境感知和导航。
声音传感器
红外传感器
检测声音强度和频率, 用于语音识别和声音定
位。
9
检测红外线的反射和透 射,用于距离测量和物
体识别。
编程软件与语言支持
提供调试工具,如单步执行、断 点设置、变量监视等,方便用户
进行程序调试和优化。
10
2024/1/26
03
搭建与编程实践
11
搭建步骤及注意事项
搭建步骤
确定机器人功能和设计
选择合适的乐高组件
2024/1/26
12
搭建步骤及注意事项
按照设计图逐步搭建
连接电源和电机
进行初步测试
2024/1/26
13
搭建步骤及注意事项
乐高机器人编程软件
提供图形化编程界面,支持多种 编程语言,如Scratch、Python
等。
2024/1/26
编程语言
支持多种编程语言,如C、C、 Java等,方便用户根据自己的需 求进行编程。
软件功能
提供丰富的软件功能,如变量定 义、条件判断、循环控制、函数 调用等,方便用户编写复杂的程 序。
调试工具
2024/1/26
创意搭建大赛
鼓励学生发挥想象力,利 用乐高机器人搭建出具有 创意的作品。
编程马拉松
举办编程马拉松活动,让 学生在规定时间内完成编 程任务,锻炼学生的编程 能力和解决问题的能力。
28
家长参与和亲子互动形式
第1课 机器人与LEGO机器人

1单位轴套
1/2单位轴套
连接销多用于梁或其它零件的连接和固定。
控制核心是机器人的“大脑”和“心脏”,它为机器人提供指令,控制机 器人其它设备的运行。机器人通过控制核心存储并运行程序。可通过 电池为其充电。
电机(马达)是机器人常用输出设备。可以驱动机器人,完成行走等 动作。
传感器是机器人的输入设备。通过传感器,机器人可以接收到外界的 信息,实现“视觉”、“触觉”等功能。
1.搭建机器人常用的零件有哪些?作用是什么呢? 2.改装设计的创意模型,让其具有某种功能。
欢迎来到lego机器人的世界
多用于搭建机器人的主体结构。 也可以作为测量工具。梁上每一个圆孔就是一个单位。 零件指南中每个零件旁边都有一个数字标注。
轴的横截面为十字形,多用于转动结构。可以与圆孔、十字形孔连接。 轴的长度不易读取,可以用梁做对比,孔的数量就是该零件中的螺母或垫片功能相似。
乐高机器人课件
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、?认识NXT主要配件,并将其与RCX核心配件作比较,学习和掌握新型乐高机器人;2、?搭建蓝牙机器人;3、?知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMSNXT与RCX的比较1、处理器由8位升到32位丹麦乐高(LEGO)将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGOMi ndstormsNXT”。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而NXT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比较。
图1:安装4个传感器和3个伺服马达的LEGONXT图4:LEGONXT系统目前提供的4种传感器全家福5、改进了编程软件NXT程序用软件“ROBOLAB,跟ROBOLAB原来的版本一样,是基于NILabVIEW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近400个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS 为“Windows2000”以上和“MacOSX”。
图5:乐高网站给出的ROBOLAB2.9的样图,跟以前版本相比,变化较大二、?快速认识NXT1、?按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、?NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“MyFiles我的文件”、“Tryme测试”、“Setti ngs设置”、“Bluetooth蓝牙”、“View查看”、“NXTProgramNXT程序”。
认识乐高配件(课堂PPT)
14
• 轮轴
15
• 轮轴
16
• 轮轴
17
• 轮轴
18
• 轮轴
19
• 轮轴
20
• 轮轴
21
• 轮轴
22
• 轮轴
23
• 轮轴
24
轮轴
25
• 轮轴
26
• 指针
27
•梁
28
•梁
29
•梁
30
•梁
31
•梁
32
•梁
33
•梁
34
•梁
35
•梁
36
•梁
•认识乐高配 件
1
课程标准 认识乐高配件 认识乐高配件
学习目标
知识点 认识乐高配件
2
今天我们正式踏入机器人的世界里,我们要 先打好机器人建构和编程的基础。
3
这节课的主要任务是自己看图来找到和图上 一样的配件
每人一个托盘
4
• 套管
5
• 套管
6
•销
7
•销
8
•销
9
•销
10
•销
11
•销
60
• 二分之一梁
61
• 二分之一梁
62
• 3轮辐角块
63
• 管子
64
• 套管/轮轴延长器
65
• 角块
66
• 角块
67
• 齿轮
68
• 齿轮
69
齿轮
70
• 齿轮
71
• 齿轮
72
• 蜗轮
73
• 转台底
74
• 转台顶
75
• 链齿轮
乐高机器人认识零件
皮带与滑轮
A)大滑轮 C)小滑轮 E)黄色皮带 G)白色皮带
B)6孔滑轮 D)半轴套滑轮 F)蓝色皮带 H)黑色皮带
轮子
A)大号白色轮毂和轮胎 C)小号白色轮毂和轮胎 E)小号黄色轮毂和轮胎 G)大号黄色轮毂和轮胎
B)中号白色轮毂和轮胎 D)滑轮 F)中号黄色轮毂和轮胎 H)履带及其轮毂
乐高单位:
B) ”T”型灰色轴套连接器
E)蓝色2号连接器 H)短中轴“T”型连接器 K)灰色3孔平板连接器
C)灰色肘型连接器
F)双轴连接器 I)灰色4孔平板连接 L)凸轮
齿轮
A)40齿正齿轮 C)16齿正齿轮 E)8齿正齿轮
B)24齿正齿轮 D)12齿斜齿轮 F)冠状齿轮
G)离合齿轮
I)齿条
H)差速齿轮
J)涡杆
LEGO标准结构
最紧凑的固定结构
将竖直的梁固定
延续出更多:
N)2*2蓝色圆片 Q)1*8灰色的片 T)1*3黄色的片 W)1*2马达固定片
L)2*4灰色带孔的片
O)2*2白色圆片 R)1*6灰色的片 U)灰色拐角片 X)1*1灰色的片
块
A)2*4黑色的块 C)1*2黑色的块 E)1*2的黑楔 G)2*2黑色的圆块 I)1*2黑色反向楔
B)2*2黑色的块 D)1*2黄色的块 F)1*2的黄楔 H)2*3黑色反向楔 J)1*2黄色反向楔
片
A)6*10灰色的片 D)2*8灰色带孔的片 G)2*2灰色的片
B)2*10灰色的片 E)2*2灰色直角架 H)2*2绿色的片
C)2*8绿色的片 F)2*6灰色带孔的片 I)2*2蓝色的片
J)2*2旋转片
M)3*6绿色三角形的片 P)1*10灰色的片 S)1*4灰色的片 V)1*2灰色的片
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N)黑色拐角梁
O)黄色拐角梁
3
片
A)6*10灰色的片
B)2*10灰色的片 C)2*8绿色的片
D)2*8灰色带孔的片 E)2*2灰色直角架 F)2*6灰色带孔的片
G)2*2灰色的片
H)2*2绿色的片
I)2*2蓝色的片
J)2*2旋转片
K)2*4黄色的片
L)2*4灰色带孔的片
M)3*6绿色三角形的片 N)2*2蓝色圆片
H)2*3黑色反向楔 J)1*2黄色反向楔
5
轴
A)#12轴 C)#8轴 E)#5轴 G)#3轴 I)带销的轴
B)#10轴 D)#6轴 F)#4轴 H)#2轴
6
销
A)黄色双销
B)黑色长销
C)蓝色带轴套的销
D)灰色带轴销
E)短销
F)黑色摩擦销
G)1/2销
H)灰色的销
7
轴套
A)1/2轴套
B)轴套
8
连接器
O)2*2白色圆片
P)1*10灰色的片
Q)1*8灰色的片
R)1*6灰色的片
S)1*4灰色的片
T)1*3黄色的片
U)灰色拐角片
V)1*2灰色的片
W)1*2马达固定片 X)1*1灰色的片
4
块
பைடு நூலகம்
A)2*4黑色的块 C)1*2黑色的块 E)1*2的黑楔 G)2*2黑色的圆块 I)1*2黑色反向楔
B)2*2黑色的块 D)1*2黄色的块 F)1*2的黄楔
B)24齿正齿轮
C)16齿正齿轮
D)12齿斜齿轮
E)8齿正齿轮
F)冠状齿轮
G)离合齿轮
H)差速齿轮
I)齿条
J)涡杆
10
皮带与滑轮
A)大滑轮 C)小滑轮 E)黄色皮带 G)白色皮带
B)6孔滑轮 D)半轴套滑轮
F)蓝色皮带 H)黑色皮带
11
轮子
A)大号白色轮毂和轮胎 C)小号白色轮毂和轮胎 E)小号黄色轮毂和轮胎 G)大号黄色轮毂和轮胎
认识零件
1
零件种类
梁 连杆
片 砖 轴
销 轴套
连接器
齿轮
滑轮和 皮带
2
梁
A)1*2黑色的梁
B)1*2黄色的梁
C)1*2绿色十字孔梁
D)7孔黑色平梁
E)5孔灰色平梁
F)1*4黑色的梁
G)1*4绿色的梁
H)1*6黑色的梁
I)1*8黑色的梁
J)1*10黑色的梁
K)1*12黑色的梁 L)1*16黑色的梁
M)黑色“L”型的梁
B)中号白色轮毂和轮胎 D)滑轮 F)中号黄色轮毂和轮胎 H)履带及其轮毂
12
乐高单位:
13
LEGO标准结构
最紧凑的固定结构 将竖直的梁固定
14
延续出更多:
15
A)”T”型灰色轴连接器 B) ”T”型灰色轴套连接器 C)灰色肘型连接器
D)蓝色1号连接器
E)蓝色2号连接器 F)双轴连接器
G)长中轴“T”型连接器 H)短中轴“T”型连接器 I)灰色4孔平板连接器
J)灰色“L”型连接器 K)灰色3孔平板连接器 L)凸轮
M)半轴套复合式连接器
9
齿轮
A)40齿正齿轮