附加系统
《SOLAS》公约关于船舶危险品适装的相关规定

《国际海上人命安全公约》公约关于船舶危险品适装的相关规定:危险货物运输1 目的本条的目的是为载运危险货物的船舶规定附加的安全措施,以达到本章的消防安全目标。
为此,应满足下列功能要求:.1 应配备防火系统以保护船舶免受因载运危险货物而带来的额外火灾危险;.2 应将危险货物与着火源充分隔开;.3 应针对因载运危险货物而带来的危险配备适当的人员保护设备。
2 一般要求2.1 除符合本章B、C、D、E 部分各条和第18 条以及20 条①的相应要求外,本条2.2所述的拟用于载运危险货物的船舶类型和货物处所还应符合本条的相应要求,但在载运有限数量的危险货物时,且此种要求已通过符合本章的其他要求而得到满足时除外。
船舶类型和载运危险货物的方式见本条2.2 和表19.1。
小于500 总吨的货船应符合本条,但主管机关可以降低要求,且该降低的要求应记录在本条4 中所述的符合证明中。
2.2 表19.1 和表19.2 的适用范围应以下列船舶类型和货物处所为准:.1 船舶和货物处所并非专门设计用于载运货物集装箱,而是拟用于载运包装危险货物,包括装在集装箱和可移动罐柜内的危险货物;.2 为拟载运装在集装箱和可移动罐柜内的危险货物而建造的专用集装箱船和货物处所;.3 拟用于载运危险货物的滚装船和滚装处所;.4 拟用于载运固体散装危险货物的船舶和货物处所;和.5 拟用于载运除船载驳船内散装液体和气体以外的其他危险货物的船舶和货物处所。
3 特殊要求除另有规定外,表19.1、19.2 和19.3 对“甲板上”和“甲板下”的危险货物积载的适用范围应以下列要求为准,其下列各节的编号在这些表的第一栏中显示。
3.1 供水3.1.1 供水布置应通过固定加压或通过位于适当位置的遥控装置启动消防泵,确保能够立即从消防总管按所要求的压力供水。
3.1.2 输送的水量应能向本章第10.2 条所规定尺寸的4具水枪以该条规定的压力供水,当空舱时能射到货物处所的任何部分。
附有系统参数的平差及其参数显著性检验

附有系统参数的平差及其参数显著性检验摘要:通过对测量误差中系统误差影响及重要性的分析,对附有系统参数平差原理进行了探讨,得出了其平差数学模型和系统参数显著性检验的方法,最后利用某实测数据进行验证计算。
关键字:系统参数;平差;显著性检验1.引言观测误差按性质分为三种成分:粗差、系统误差、偶然误差。
但在经典平差中,通常假定观测值中仅包含系统误差。
经典平差中是假定观测误差中不含有系统误差,但测量实践证明,尽管在观测过程中会采用各种观测措施减少系统误差,并在观测后对观测数据进行了必要的处理,但难以避免观测值中仍含有系统误差。
因此,在平差前完全剔除粗差和消除系统误差的影响是不可能的。
随着测量精度的不断提高,对平差结果的精度要求也愈来愈高,近年来出现了通过平差剔除粗差和消除系统误差对平差结果影响的方法。
传统上剔除观测值的粗差,通常是在平差之前进行,比如采用避免粗差的观测程序,增加多余观测,以及用几何条件闭合差控制粗差等,尽管采用这些措施,一些小的粗差仍然是不可避免的。
1968年,巴尔达(W.Baarda)在他的名著《大地网的检验方法》中,首先用数理统计方法阐述了测量系统的可靠性理论和检验粗差的“数据探测(Data-Snooping)”法。
为在平差过程中自动剔除粗差提供了理论基础;而对平差过程中消除系统误差对平差结果影响的方法,在航空摄影测量学中称为自检校平差。
这种平差方法的基本思想是,在仅含偶然误差模型式的基础上,加入一些附加参数(或称系统参数)用以补偿在观测数据中存在的系统误差对平差结果的影响。
但在函数模型中加入附加参数后,可能会引起附加参数之间或附加参数与基本参数之间的强相关,而使法方程性质恶化,为使法方程性质不致变坏,应剔除一些参数。
附加参数的统计检验就是解决这个问题的。
随着对测量精度的要求越来越高,一些精密工程测量中考虑了系统参数对平差结果的影响。
比如在高速铁路的CPIII测量中、大型GPS网的监测等。
win系统搭建nas完美方案

win系统搭建nas完美方案在创建NAS(网络附加存储)系统时,Windows操作系统是一个可靠且功能强大的选择。
本文将为您提供一个完美的方案,以帮助您搭建仿佛专业级的NAS系统。
这个方案不仅仅局限于个人用户,也适用于小型企业。
I. 准备工作在开始之前,您需要准备以下工具和材料:1. 一台运行Windows操作系统的高性能计算机,具备足够的处理能力和存储容量。
2. 一个稳定的局域网连接,确保数据传输速度和稳定性。
3. 存储设备,如硬盘驱动器或固态驱动器(SSD),以满足您的存储需求。
II. 安装操作系统1. 确保您的计算机已经在最新版本的Windows操作系统上运行。
您可以通过系统设置或Windows更新功能进行更新。
2. 确保您的计算机上已经安装了必要的驱动程序,以确保硬件的正常运行。
III. 创建共享文件夹1. 打开Windows资源管理器,并导航到您想要共享的文件夹位置。
2. 右键单击该文件夹,并选择“共享”选项。
3. 在共享选项中,选择“高级共享”并勾选“共享此文件夹”复选框。
4. 点击“权限”按钮,并添加需要访问共享文件夹的用户或用户组。
5. 根据需求设置共享文件夹的读写权限和其他访问控制选项。
6. 点击“确定”保存设置。
IV. 设置网络访问1. 打开控制面板,并选择“网络和共享中心”选项。
2. 在左侧导航栏中,点击“更改高级共享设置”。
3. 在弹出的窗口中,找到“网络发现”部分,并打开“启用网络发现”和“启用文件和打印机共享”选项。
4. 点击“保存更改”。
V. 连接到NAS1. 在其他计算机上打开文件资源管理器。
2. 在地址栏中输入“\\计算机名称”(无引号),其中“计算机名称”是您保存共享文件夹的计算机的名称。
3. 按下Enter键,您将能够访问NAS上的共享文件夹。
VI. 备份和数据保护1. 定期备份您的数据是非常重要的。
您可以使用Windows系统自带的备份工具,或者选择第三方备份软件来保护您的数据。
05第二章系统可靠性模型03

1
内容提要
§ 2—3 串联系统的可靠性模型 一、定义和特点 二、可靠性框图 三、数学模型 四、提高串联系统可靠性的措施
§2—4 并联系统的可靠性模型 一. 定义和特点 二、可靠性框图 三、数学模型 四、提高并联系统可靠性的措施
§2-5 混联系统的可靠性模型 一、 串并联系统(附加单元系统) 二、并串联系统(附加通路系统) 三、较复杂的混联系统
一、 串并联系统(附加单元系统),图2—20。 27
20
上图串联了n个组成单元,而每个组 成单元由m个基本单元并联。
28
设每个组成单元的可靠度为Ri(t),则 RS1(t):
n
Rs1(t) 1 (1 Ri (t))m (2-18) i1
(括号里为每个并联系统的可靠性)
二、并串联系统(附加通路系统),图2-21
17
求: (1) 滤网堵塞时的可靠度、失效率、
21
平均寿命;
(2) 滤网破损时的可靠度、失效率、 平均寿命。
解 :(1 ) 滤网堵塞时系统的可靠性框图2-18, 为串联系统。
18
由于 λ = 常数,所以其为指数分布。
22
故有:
2
s i 5105 1105 i1
6 10 5 h-1
RS (1000) est e61051000 e0.06 0.94176
1 2 1 2
1 5 105
1 1105
1 (5 1) 105
10333.3h
25
S
(t)
e1t 1
e2t 2
e1t e2t
(1 2 )e(12 )t
e(12 )t
5105
e51051000 1105 e11051000 (5 1) 105 e e e 51051000 11051000 61051000
unix基础命令培训
1.1. UNIX操作系统简介UNIX是较早广泛使用的计算机操作系统之一,它的第一版于1969年在Bell实验室产生,1975年对外公布,1976年以后在Bell实验室外广泛使用。
1.1.1.UNIX特点UNIX操作系统是一种非常流行的多任务、多用户操作系统,应用非常广泛。
UNIX 的主要特点为:多任务(Multi-tasking)UNIX是一个多任务操作系统,在它内部允许有多个任务同时运行。
而DOS操作系统是单任务的操作系统,不能同时运行多个任务。
早期的UNIX 操作系统的多任务是靠分时(time sharing)机构实现的,现在有些UNIX除了具有分时机制外,还加入了实时(real-time)多任务能力,用于象实时控制、数据采集等实时性要求较高的场合。
多用户(Multi-users)UNIX又是一个多用户操作系统,它允许多个用户同时使用。
在UNIX中,每位用户运行自己的或公用的程序,好象拥有一台单独的机器。
DOS 操作系统是单用户的操作系统,只允许一个用户使用。
并行处理能力UNIX支持多处理器系统,允许多个处理器协调并行运行。
管道UNIX允许一个程序的输出作为另外一个程序输入,多个程序串起来看起来好象一条管道一样。
通过各个简单任务的组合,就可以完成更大更复杂的任务,并极大提高了操作的方便性。
后来DOS操作系统也借鉴并提供了这种机制。
功能强大的Shell UNIX的命令解释器由Shell实现。
UNIX提供了三种功能强大的Shell,每种Shell本身就是一种解释型高级语言,通过用户编程就可创造无数命令,使用方便。
安全保护机制UNIX提供了非常强大的安全保护机制,防止系统及其数据未经许可而被非法访问。
稳定性好在目前使用的操作系统中,UNIX是比较稳定的。
UNIX具有非常强大的错误处理能力,保护系统的正常运行。
用户界面传统的UNIX用户界面采用命令行方式,命令较难记忆,很难普及到非计算机专业人员。
土地信息系统课程期末考试试卷和参考答案A
**大学资源与环境科学学院学年度第二学期期末考试《土地信息系统》试卷 A一、填空(每空0.5,共20分)1、 土地信息具有________、___________、_____________、___________四个基本特征。
2、 LIS中两种最基本的数据结构是___________,_____________。
其中___________是基于场模型,而___________是基于要素模型的。
3、 图1中,A,B,C为各种植被类型代码,D为铁路代码,小黑原点为栅格中心点。
在确定该栅格单元的代码时,若该栅格单元代码为C,是利用__________方法,若该栅格单元代码为B,是利用__________方法,若栅格单元的代码为D,则利用了__________方法来确定栅格代码的。
4、 一个完整的LIS主要由四个部分构成,即______________,________________,________________,_________________,其中__________是LIS处理对象。
5、 LIS中表示和存储DEM的常用方法有___________、____________和_____________三种。
其中_________方法结构最简单,但对于平坦地区存在冗余存储。
6、 网络土地信息系统的组合方式______________, _______________,________________,_________________, ________________。
7、 WebLIS的解决方案_________________,___________________,___________________,_____________________,_________________。
8、 软件生存周期模型有:____________________, ________________,________________,___________________,________________。
通过进程查看电脑是否存在异常软件运行

通过进程查看电脑是否存在异常软件运行电脑应用2008-11-25 00:40:06 阅读165 评论4 字号:大中小订阅同时按CTRL+ALT+DEL三个键或者在任务栏按右键打开任务管理器,其中有一项就是进程。
下图是本人电脑运行的进程,第一个进程是抓图软件,ati2evxx.exe是ATI显卡增强工具。
其他都是系统必须运行的进程。
补充:最后一项System Idle Process 是Windows内存处理系统进程。
在这个进程里出现的CPU占用数值并不是CPU实际的占用,而是体现CPU的空闲率,这个数值越大,CPU的空闲率就越高。
一旦发现System Idle Process 的CPU占用值很低的话,就应该注意后台有什么大的程序在运行或者感染病毒了。
当System Idle Process的CPU占用值很低的时候,只要看上面的进程哪个CPU 占用大,它就是问题的麻烦制造者。
进程是程序在计算机上的一次执行活动。
当运行一个程序,就启动了一个进程。
显然,程序是死的(静态的),进程是活的(动态的)。
进程可以分为用户进程和系统进程。
用户进程就是由用户启动的进程,比如用户运行QQ、迅雷等软件。
凡是用于完成操作系统的各种功能的进程就是系统进程,它们就是处于运行状态下的操作系统本身。
系统进程一般包括:基本的系统进程和附加的系统进程。
以Windows XP系统为例介绍1.最基本的系统进程此类系统进程是系统运行的必备条件,只有这些进程处于活动状态,系统才能正常运行。
因此,它们是不能被结束任务的。
winlogon.exe:管理用户登录。
csrss.exe:这是子系统服务器进程,负责控制Windows创建或删除线程以及16位的虚拟DOS环境。
System Idle Process:这个进程是作为单线程运行在每个处理器上,并在系统不处理其它线程的时候分派处理器的时间。
smss.exe:这是一个会话管理子系统,负责启动用户会话。
附加系统参数平差

2.365 13 T N12 BT A , N 22 A T A 83.449, BT l , A l 99.932 0.262 6 5.625 1 3 1 x N11B T l ˆ mm, Qx N111 ˆ 8 1 3 3.875 ˆ M N 22 N 21 N111 N12 81.171, R M 1 AT Pl N 21 x1 1.0574 ˆ
ˆ ˆ H 0 : E(Si ) 0, 备选假设为H1 : E(Si ) 0,构成t分布统计量 ˆ ˆ Si Si t ~ t r , 接受域P t t 1 ,如果 0 QSˆi Sˆi ˆ ˆ 2 2 0 QSˆi Sˆi 拒绝原假设,则认为附加系统参数显著。 ˆ ˆ 例:H 0 : E(R) 0, 备选假设为H1 : E(R) 0,t ˆ R 1.0574 2.792 3.415 0.0123
问题,如果引入但不加以选择,这可能产生引入的参数太多,附加参数之间相关
而造成法方程病态,为避免这些问题,应该对附加系统参数模型和系统参数的正 确性进行检验。 1. 附加系统参数模型正确性检验 将原模型和附加系统参数模型的方差估值进行比较,检验是否存在显著差异, 如果无显著差异,则认为引入系统参数模型没有必要,原模型正确。 2. 附加系统参数显著性检验 当附加参数正交或接近正交时,可根据t分布统计量对附加参数逐个进行显著 性检验。原假设为:
n ,1 m ,1
ˆ ˆ 则误差方程为V B x A S l , S 为系统参数平差值, S 为系统误差影响项。 Aˆ ˆ
n ,1 n ,t t ,1 n , m m ,1 n ,1 m ,1 n , m m ,1
KKS编码
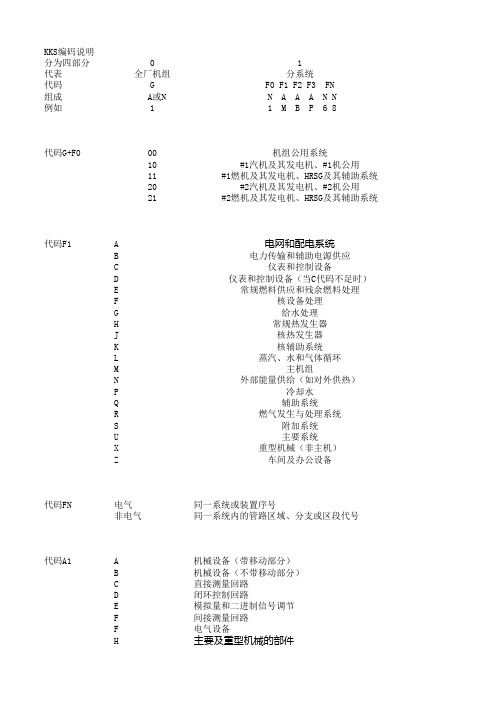
能量计算 电网及配电保护装置 电网及分布分散面板及控制柜
阴极保护装置 燃机发电机和汽机发电机引出线
发电机基础柜 发电机断路器 发电机升压变
主手动阀或止回阀 气动液压控制阀(调节或开/关) 马达驱动过程控制阀 电动过程控制阀 手动疏水/排空阀 自我调节阀(压力,温度,液位,等。) 仪表阀 未使用 安全和泄压阀
2
设备单元代码
A1 A2
AN
A A NNN
A A 210
3 附加码
(无)
我厂不使用附加码,无需考虑
(A为字母,N为数字) 11MBP68AA210即#1机燃气辅助截止阀
仅以我厂机组为例(因单轴与多轴KKS码不同)
代码 F1+F2+F3
ACA
ADA
AEA
AFA
AGA
AHA
AJA
AQA
ARA
ASU
AXP
BAA
BAB
BAC
BAT
BAU
BAY
BBA
BBB
BBT
BDA
BDT
BFA
BFB
BFC
BFD
BFE
BFF
BFT
BJA
BLA
BLE
BLL
BLS
BLT
BMA
变电 380KV-420KV
21
#2燃机及其发电机、HRSG及其辅助系统
代码F1
A
B
C
D
E
F
G
H
J
K
系统分区怎么分
系统分区怎么分
系统分区是硬盘上存放操作系统、引导程序和系统文件的特定分区。
下面是一种常见的系统分区分法:
1. 系统保留分区(System Reserved Partition):这是一个小型的系统分区,用于存放Windows操作系统的引导程序和系统文件。
它通常只有100MB的大小。
2. 主操作系统分区(Primary System Partition):这是主要的系统分区,通常是C盘,在Windows系统中默认安装程序和用户文件的位置。
3. 附加操作系统分区(Additional System Partition):如果你需要安装多个操作系统,比如Windows和Linux双系统,可以创建一个附加的系统分区来存放另一个操作系统的文件。
除了以上的基本系统分区,你还可以根据自己的需求创建其他的分区,比如数据分区、备份分区等,来更好地管理你的硬盘空间。
但需要注意的是,分区过多可能会导致硬盘空间的浪费和管理的复杂化,所以建议慎重考虑是否需要创建额外的分区。
MIB与SIB
学习一下,什么是MIB与SIBMIB:master information block(主系统信息块)SIB:system information block(系统信息块)SB:scheduling blocks(调度块)系统消息元素是被放在“系统信息块(SIB)”中进行广播的。
一个系统信息块将具有同样性质的系统信息元素组合在一起,不同的系统信息块可以有不同的特征。
系统消息是按“树”的形式来组织的。
一个小区的MIB包含这个小区的许多系统信息块的参考及调度信息。
可选地,MIB也可以包含一个或两个“调度块(scheduling blocks)”的参考及调度信息,调度块为附加系统信息块提供参考及调度信息。
一个SIB的调度信息只可以被包含在一个主信息块中或一个调度块中。
MIB:包括MIB Value Tag,支持的PLMN类型,PLMN ID,以及关于其他SIBs和SB的调度信息。
SB1和SB2的出现决定于MIB中的调度信息,SB的作用也是承载其他SIBs的调度信息。
SIB1:包括NAS系统信息,UE在空闲态和连接态下所使用的定时器和常数信息。
SIB2:URA ID信息。
SIB3:空闲状态的小区选择和重选的参数,计算是否满足驻留条件。
SIB4,内容同SIB3,用于UE处于连接态。
SIB5,包含了公共物理信道的配置参数SIB6,包含了用于连接模式的公共和共享物理信道配置参数,内容同SIB5。
SIB7,包含了快速变化的参数,比如上行干扰和动态持续值。
对于FDD来说,只有上行干扰SIB11,包含了测量控制信息SIB12,用于连接模式下的测量控制信息,具体内容同SIB11。
在TD时(都是SIB):除了SIB7之外,其它的SIB的有效性,即此SIB里的系统信息是否改变依靠的是V alue Tag来标志空闲模式有的系统消息--master information block:支持的PLMN类型,系统消息调度信息(关于SIB和SB)--Scheduling Block1和Scheduling Block2:其出现决定于MIB中的调度信息,SB的作用也是承载其他SIBs的调度信息--system information block type1:NAS层消息,DRX周期因子,UE定时器/计数器信息--只有此消息的有效范围是PLMN,其他均为CELL--system information block type2:URA编号--system information block type3:包括Cell identity,Cell selection and re-selection info和Cell Access Restriction共3个IE************************************Cell sel and re-sel IE:TD小区选择/重选参数(Qrxlevmin/Ssearch,rat/Sintrasearch/Sintersearch),SIB4是否存在标识Cell Access Restriction IE:Cell Barred指示当前小区是否被禁掉,Intra-frequency cell re-selection indicator与TbarredAccess Class Barred list指明了接入类AC0到AC15中哪些是被禁止的,UE自己的AC存储在SIM卡中************************************--system information block type5:公共物理信道PCCPCH/SCCPCH/PRACH/FACH配置信息,扰码CPI,最后应含有小区对HSDPA支持信息;************************************Secondary CCPCH info IE(Common timeslot info IE):二次交织模式2nd interleaving mode、TFCI编码码字长度TFCI coding、打孔极限Puncturing limit、重复周期Repetition period和Repetition length长度************************************--system information block type7:上行链路干扰(FDD),动态持续电平值Dynamic persistence level(TDD)--system information block type8:W用--无关--system information block type9:W用--无关--system information block type10:W用--无关--system information block type11:测量控制信息************************************说明是否进行“异频/异系统测量”,是否是HCS小区,测量类型(PCCPCH RSCP),在RACH上报小区个数,Reporting information for state CELL_DCH IE:与measurement control相同************************************--system information block type15:包含了基于UE定位和UE辅助定位两种方法的系统信息通话模式有的系统消息--system information block type4:连接模式(RRC_PCH)下小区选择/重选--同SIB 3--system information block type6:同SIB 5--system information block type12:同SIB 11--system information block type13:包含核心网类型是ANSI-41的系统信息--无关--system information block type14:应用于TDD 3.84 Mcps制式的系统信息--无关--system information block type15:包含基于UE定位和UE辅助定位两种方法的系统信息--无关--system information block type16:用于G->T切换,包含了UE所需的radio bearer、transport channel 和physical channel参数信息--system information block type17:UE连接模式下配置共享物理信道PUSCH和PDSCH的一些参数--system information block type18:空闲模式以及连接模式下相邻小区的PLMN标识,国家码,移动码--通常不发寻呼消息--paing type1:pagingCause为terminatingConversationalCall则响应寻呼,为terminatingLowPrioritySignalling则不响应;--paing type2:。
《SOLAS》公约关于船舶危险品适装的相关规定
《国际海上人命安全公约》公约关于船舶危险品适装的相关规定:危险货物运输1 目的本条的目的是为载运危险货物的船舶规定附加的安全措施,以达到本章的消防安全目标。
为此,应满足下列功能要求:.1 应配备防火系统以保护船舶免受因载运危险货物而带来的额外火灾危险;.2 应将危险货物与着火源充分隔开;.3 应针对因载运危险货物而带来的危险配备适当的人员保护设备。
2 一般要求2.1 除符合本章B、C、D、E 部分各条和第18 条以及20 条①的相应要求外,本条2.2所述的拟用于载运危险货物的船舶类型和货物处所还应符合本条的相应要求,但在载运有限数量的危险货物时,且此种要求已通过符合本章的其他要求而得到满足时除外。
船舶类型和载运危险货物的方式见本条2.2 和表19.1。
小于500 总吨的货船应符合本条,但主管机关可以降低要求,且该降低的要求应记录在本条4 中所述的符合证明中。
2.2 表19.1 和表19.2 的适用范围应以下列船舶类型和货物处所为准:.1 船舶和货物处所并非专门设计用于载运货物集装箱,而是拟用于载运包装危险货物,包括装在集装箱和可移动罐柜内的危险货物;.2 为拟载运装在集装箱和可移动罐柜内的危险货物而建造的专用集装箱船和货物处所;.3 拟用于载运危险货物的滚装船和滚装处所;.4 拟用于载运固体散装危险货物的船舶和货物处所;和.5 拟用于载运除船载驳船内散装液体和气体以外的其他危险货物的船舶和货物处所。
3 特殊要求除另有规定外,表19.1、19.2 和19.3 对“甲板上”和“甲板下”的危险货物积载的适用范围应以下列要求为准,其下列各节的编号在这些表的第一栏中显示。
3.1 供水3.1.1 供水布置应通过固定加压或通过位于适当位置的遥控装置启动消防泵,确保能够立即从消防总管按所要求的压力供水。
3.1.2 输送的水量应能向本章第10.2 条所规定尺寸的4具水枪以该条规定的压力供水,当空舱时能射到货物处所的任何部分。
一种航空附加服务销售中心系统的研究与实现

网络信息工程2020.11一种航空附加服务销售中心系统的研究与实现孙琼巍12,李雄清12,熊铭1,周东琳12,李永1(1.中国民航信息网络股份有限公司,北京,101318; 2.民航旅客服务智能化应用技术重点实验室,北京,101318)摘要:本文设计并实现的核心是根据旅客的行程信息,一次性计算出旅客本次行程中可利用的全部附加服务信息,并结合旅客的历史购买行为、行程属性等信息,给出优先推荐的附加服务信息,实现旅客一次性完成所有附加服务购买的附加服务销售中心系统。
在支持旅客全场景(INPATH 、MMB 、全渠道)购买附加服务的同时,给旅客更方便的购买体验,从而达到提升航空公司附加服务销售的目的。
关键词:附加服务;销售中心;全渠道Research and Implementation of an Aviation Ancillary Services SalesCenter SystemSun Qiongwei 1,2, Li Xiongqing 1,2, Xiong Ming 1, Zhou Donglin 1,2, Li Yong 1(1. China civil aviation informstion network co., LTD. , Beijing, 101318; 2. Key laboratory ofintelligent application of civil aviation passenger service, Beijing, 101318)Abstract : The core of the research and implementation of this article is to calculate all the ancillary service information that the passenger can use in this trip based on the passengers itinerary information at one time, and combine the passenger^ s historical purchase behavior, itinerary attributes and other information to give priority recommended ancillary services Information, so that passengers can complete all ancillary services a/t once. While supporting passengers to purchase ancillary services in all scenarios (INPATH, MMB, omni-channel), it provides passengers with a more convenient purchasing experience, thereby achieving the purpose of enhancing the sales of ancillary services by airlines.Keywords : ancillary services ; sales center; omni-channel0引言目前国内航空公司基本都开展了附加服务在线销售系统的建设,主要实现方式为:(1)建设单一的附加服务销售功能,旅客只能在完成出票后,来系统中进行补购;(2)将航空公司可以提供的附加服务依次展现在购买入口,旅客必须先选择自己需要购买的附加服务种类,才能进入到具体的附加服务购买流程中。
通风空调系统风量附加设计方法探讨

通风空调系统风量附加设计方法探讨I. 引言- 论文背景- 研究目的II. 通风空调系统风量计算的常用方法- 空气需求量计算方法- 风量计算方法III. 通风空调系统风量附加设计方法- 设计原则- 空气质量控制- 风量调节与分配IV. 设计案例分析- 案例介绍- 参数设定- 模拟结果分析V. 结论与展望- 研究总结- 发展趋势推测VI. 参考文献第一章:引言目前,随着人们对于室内舒适度要求的不断提高,各类建筑物的通风空调系统也成为了建筑安装工程的重要组成部分。
传统的通风系统设计主要是根据使用人数和场地面积来计算空气需要量并配置相应的送回风机、新风机等设备来实现,但这种计算方法无法考虑到人员活动所产生的各种复杂因素,如车间内设备的热量产生、房间内有机物质的挥发等,这些问题会使得计算结果产生误差,从而影响到设备的使用效果。
因此,从实际应用出发,本论文旨在探讨通风空调系统风量附加设计方法,通过改进现有设计方法,使通风空调系统在设计过程中更加精确,并减少计算误差,从而保证设备的使用效果和人员的舒适度。
第二章:通风空调系统风量计算的常用方法通风空调系统中风量的计算是通风空调系统设计的核心内容之一。
目前,通风空调系统中,常用的风量计算方法主要有两种。
一种是根据人员活动场所的面积和有关系数,来计算机械通风系统的风量,具体计算方法如下:1.计算人均呼吸量人常规情况下的呼吸量一般是每分钟7-9.5升,这里取8升/分钟,每个成年人每小时大约呼吸480升的空气,根据这个数据,可以计算出房间内一定数量的人员所需要的空气量。
2.评估室内CO2浓度情况根据人员所处环境的CO2浓度情况,可以大致估算出空气需要量,并进一步计算出通风系统所需要的风量。
具体计算公式如下:Q= (V1-V2) / t其中:Q为通风系统需要提供的新风量,m³/s;V1为室内空气一定容积内CO2浓度,mg/m³;V2为室外空气CO2浓度,mg/m³;t为通风系统输入的时间间隔,单位为h。
变形监测中系统误差处理的方法

其 中 ,S = ( s l , , , . . . , ) 观测值系统误差 的 n 维未 知非随机 向 量, 表示第 f 个观测值中的系统误 差 ( i = 1 , 2 , …, n ) , 即非参数分量; P为 L的权 阵。 误差方程 : V=B X+S—L 平 差原则 : V P V +a S R S= m i n 其中 , 为参数分量 的估值 ; 为非参数分量的估值 ;口为平滑 凼子 , 调节 系统误差项和偶 然误差项之 间的比例 ;R为一 个适当给定
△ x =一 f P A ) 一 A P B y N ( P I — B P A x I )
=
函 数 模 型:
三 △ 随 机 模 型: D = o Q = 。 P 一
4 结 论
确 的情河 附加系统权方法适用于在函数模型中系统误差得不 到补偿 , 但又要考虑 系统误 差效应时的情况 。半参数模型法适用于不 了解 系统 误差 的规律 ,系统 误差和偶然误差的数量级相差不大 ,系统误差 的频
N= B P B— B P A ( A P A ) 一 A P B
Q =N j ) +( P A ) A P B N B P A ( A e a ) Q = l l +△ l ( _ ( A P A ) … A P B N PV/ ( n一( , + “ ”
=
M A P l =M A ( Q l + Q 2 ) ,
M= A ( Q l + Q 2 )
=
爵= V ( Q I + ) / 一 t ) .
M
附加系统权模 型 , 关键 是估计系统误差 的方差 D 2 。因为系统误差 具有 随机性 , 所 以可 以像随机误差 那样按照方差定义 、误差 传播律估 计系统误差的方差。 系统误差一般有一定 的概率分布 , 所 以可 以通过置信区间的概率 , 由最大误差估计 系统误差 的方差 。假设 系统误 差的最大值为 △ , 系统
风力发电塔水平TMD系统减振控制

风力发电塔水平TMD系统减振控制摘要:风力发电是清洁可再生能源中不可或缺的一部分,当今世界能源资源紧缺的格局下,强风作用下风力发电塔振动控制技术的研究成为风力发电推行过程中亟待解决的一大难题。
鉴于此,应对高度超过100米的风力发电塔采用水平TMD进行减振控制,促进风力发电技术的推广和使用。
关键词:风力发电塔;风振响应;TMD减振0 引言风力发电塔主体结构刚度和阻尼比较小,在强风作用下会产生较大的动力响应,其顶部各点的位移和加速度均超过限值[1],影响风力发电系统的正常工作,这也是当前风力发电大规模推广使用所面对的一个大短板。
风力发电系统要保证在强风作用下结构不会有太大的位移才能稳定工作,本研究Midas Gen软件对该结构进行建模和分析,拟采用调频质量阻尼器TMD对该结构实施风荷载激励下的减振控制。
1 工程概况利用Midas Gen建立140米柔塔风力电机的塔架模型,其顶部还有风机结构,折算成荷载附加到结构上。
塔壁为薄壁钢板构成,钢材等级为Q345,整个塔身分为六个塔段,不同塔段又分若干塔节,每节高2.5m,总塔身高137.3m,模型总质量为562.33t。
2 TMD减振设计TMD的减振原理是在主结构(主系统)上耦合一个弹簧质量阻尼振动系统(附加系统)。
当附加振动系统的固有频率处于主系统的原固有频率附近,则可使主系统原固有频率处的共振峰消失,即由原主系统的单峰共振区转变为新系统的双峰共振区。
图1为TMD设计原理[2],1水平基座,2竖向环板基座,3质量块,4固定件,5弹簧,6阻尼器,7缓存器,8质量块。
表1 TMD参数在塔架82.5m的高度处设计了一个平台,用于安装TMD减振装置。
结构一、二阶振型平动,结构三、四阶振型为结构中间的横向振动,其中第三、四阶频率为1.2Hz,作为结构的主控频率。
图1 TMD系统设计原理3 TMD减振性能分析塔架结构为圆对称模型,TMD采用8弹簧连接水平布置,如图2所示,对塔架模型进行鞥何在施加,进行风时程动力响应分析,对比无控和有控下结构的位移和加速度。
戴尔存储 NX430 网络附加存储系统说明书

3. Um die Standardsprache zu ändern, wechseln Sie zu C:\Dell_OEM\MUI und führen Sie die entsprechende Stapeldatei aus. Folgen Sie den Anweisungen auf dem Bildschirm, um Ihre bevorzugte Sprache zu installieren.
• Diese Informationen befinden sich möglicherweise auch auf einem Aufkleber auf dem Gehäuse.
• Mithilfe dieser Informationen kann Dell Support-Anrufe an den richtigen Mitarbeiter weiterleiten.
Einschalten des Speicher-Arrays
Sie müssen zuerst die Speicher-Arrays und zusätzlichen Erweiterungsgehäuse einschalten, falls vorhanden. Nachdem die Speicher-Arrays und Gehäuse initialisiert wurden, schalten Sie das Dell Storage NX430 NAS-System ein.
火箭外部结构幼儿易懂

火箭外部结构幼儿易懂火箭是依靠火箭发动机产生的推力向前运动的。
在运动过程中,发动机不断地向外喷出高速燃气流,利用燃气流的反推力来提高火箭速度。
根据火箭的运行原理,我们可以先把火箭简单地分为几个大的部分:载荷,火箭运送的对象,火箭的使命就是把卫星送入预定轨道;箭体,用来保证火箭整体的强度,内部有存放火箭燃料的储箱;发动机,用来提供火箭的动力,是火箭中最复杂、技术难度最高的部分刚刚我们简单地划分了一下火箭的基本组成,接下来我们就具体、细致地介绍一些火箭的各个分系统。
1、有效载荷有效载荷是运载火箭的运载对象。
把有效载荷送入预定轨道是运载火箭的任务。
有效载荷包括各种类型的卫星、载人飞船、太空实验舱、空间站、深空探测器等,一般在发射时有效载荷将被放置于整流罩内,也就是顶部保护罩下方。
2、箭体结构箭体结构是火箭各个受力和支撑结构件的总称。
包括有效载荷整流罩、推进剂储箱、仪器舱、箱间段、级间段、发动机承力结构、仪器支架、导管、阀门和尾舱、尾翼等。
3、推进系统推进系统的功能是产生推力,推动火箭向前运动。
推进系统分为两大类:液体推进系统与固体推进系统。
液体推进系统包括液体火箭发动机及推进剂输送系统,固体火箭推进系统就是固体火箭发动机。
4、控制系统控制系统的作用是控制火箭姿态稳定,使其按预定轨道飞行,并控制火箭发动机关机,达到预定的速度,将有效载荷送入预定轨道。
控制系统由制导、姿态控制和综合三部分组成。
5、飞行测量及安全系统飞行测量及安全系统的功能是测量火箭飞行过程中的各种关键参数,并判断其是否安全飞行。
6、箭上附加系统一些独立的、又不可缺少的箭上小系统统称为附加系统,如瞄准系统、垂直度调整系统、推进剂加注与液位测量系统、空调系统等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
23
经销商内部培训教程
2004 版
24
经销商内部培训教程
通过涡轮增压系 统对吸入的空气 进行压缩,增大 气体密度,从而, 增加每个进气冲 程进入燃烧室的 空气量,增加循 环供油量,提高 升功率和升扭矩, 达到提高燃烧效 率、提高整机使 用经济性。
2004 版
25
经销商内部培训教程
2004 版
2004 版
37
经销商内部培训教程
2004 版
38
经销商内部培训教程
2004 版
39
经销商内部培训教程
氧传感器-λ调节
2004 版
40
经销商内部培训教程
新型氧传感器
构造:
宽频带型传感器外形尺寸比跳跃 型 传感器仅大几毫米。 1 单元泵 2 能斯托单元 4 外界空气通道 5测量室 6 放氧通道
1. 2. 3. 4. 5. 6. 空气滤清器 二次空气泵 发动机控制单元 二次空气继电器 二次空气控制阀 二次空气机械阀
2004 版
5
经销商内部培训教程
2004 版
6
经销商内部培训教程
废气再循环机械阀
• • 此阀损坏后,控制单元无法存储其故障,只能通 过常规的方法进行检查。 再循环量的检查:51KPa的真空,应出现怠速不 稳或熄火。
•
•
机械阀隔膜运动、破损情况及隔膜去清洁情况的 检查。
废气再循环孔及真空软管的检查。阀底容易产生 积碳使再循环通道受阻或泄漏,清洗时须更换垫 圈并涂锂基润滑脂。 阀芯剧烈运动、阀门全开将使发动机动力性下降, 甚至熄火。
2004 版
15
经销商内部培训教程
进气管转换电磁阀-N156-
进气管转换真空膜盒
2004 版
16
经销商内部培训教程
•出现故障后对整车的影响 转换电磁阀-N156- 检查: 1.油耗过高 •电阻:25-35欧
2.高速功率差
•V.A.G1527B 应闪亮。
•可以对其进行执行元尖子诊 断01-03 •急加速或高转速(4000rpm), 真空段元拉动。 •具体内容参见相关维修手册。
2004 版
22
经销商内部培训教程
凸轮轴调整电磁阀-N205•可以对其进行执行元件自诊断:01-03
•发动机转速达2200~4000rpm,读取测量数据: - 01-08-26-3/4(1.8L); - 01-08-94-3/4(1.8T) - 01-08(1.6L) - 01-08(GOLF) •01-02-故障提示 •电磁发触点间电阻:10~18Ω •注意检查调整机构的油路部分。
2004 版
19
经销商内部培训教程
凸轮轴调整机构:
进气凸轮轴 排气凸轮轴
1. 2. 3. 4. 5.
2004 版
只能对进气凸轮轴进行调整。 排气凸轮轴被曲轴正时齿带驱动,不能调整。 进气凸轮轴通过正时链条被排气凸轮轴驱动。 凸轮轴调整是通过电控液压活塞将油压作用于链条张紧器来完成的。 凸轮轴调整机构的工作油路与气缸盖上的油道相通。
•
2004 版
7
经销商内部培训教程
检测废气再循环阀(机械)
按图示连接专用工具 VAG1390 操纵真空泵,膜片必 须朝真空连接方向移 动(用手感觉) 将手动真空泵软管从 阀上拔下,必须清晰 听到阀关闭声音(膜 片移向排气管方向)
2004 版
8
经销商内部培训教程
2004 版
9
经销商内部培训教程
2004 版
经销商内部培训教程
发动机附加控制系统
废气再循环系统 EGR
可变配气相位技术
废气涡轮增压系统 二次空气供给系统
发动机电子冷却系统 发动机动力控制 EPC
可变进气道技术
新型宽频氧传感器
2004 版
1
经销商内部培训教程
废气再循环系统 Exhaust Gas Recirculation
作用:机内净化装臵 主要降低 Nox 排放量。 汽油发动机 – 发动机 中小负荷时将一定量 的废气引入燃烧室参 与燃烧,怠速、全负 荷时不起作用。 您知道吗 ? EGR 系统的组成 工作原理
10
经销部培训教程
2004 版
12
经销商内部培训教程
Bora A4 1.8L 发动机进气管
1. 2. 3. 4. 5. 6. 7. 8. 9. 罩盖支架总成 节流阀体密封垫 电子节流阀体 单向阀 真空膜盒 电磁阀 中间歧管 阀门 密封垫
2004 版
13
2004 版
18
经销商内部培训教程
凸轮轴调整 :
• 发动机转速低时,进气管内混合气随活塞运 动,活塞运动慢 。 – 进气门应提前关闭,以避免混合气回流 进气管。 – 发动机低速时,进气凸轮轴相位应提前 调整。 •发动机转速高时,进气管内气流快,活塞在向 上运动过程中,混合气应可继续涌入气缸,为 增加混合气量,提高气缸的充气效率,进气门 延迟关闭。
QLM:空气流量
A:真空
1:来自海拔高度传感器的信号 B:大气压力
2004 版
4
经销商内部培训教程
废气再循环电磁阀-N181. 真空测试仪检测电磁阀真空度,开始无真空,电磁 阀开始工作后将有真空产生。 2. 可以在08数据块中读取废气再循环显示值。 汽油发动机:01 08 003 4 柴油发动机:01 08 003 4 3、电磁阀本身电阻标定值:14 – 20 Ω。 4、可以在发动机控制单元基本设定下检查电磁阀的功能 汽油发动机: 柴油发动机: 5、具体维修及检测过程请参照相关维修手册。
41
更换传感器时,必须线与插头 同时更换。
2004 版
3 传感器加热器
经销商内部培训教程
新型氧传感器工作原理
1. 空气 2. 传感器电压 3. 控制单元 4. 测量片 5. 尾气 6. 单元泵
7. 单元泵电流
8. 测量室 9. 扩散通道
2004 版
42
经销商内部培训教程
调整举例(一)- 混合气过浓
26
经销商内部培训教程
涡轮增压器的润滑:
转子的工作转速高达每分钟数万转至二十多万转,需要有 单独的润滑油供应管路,并为浮动轴承提供油膜支撑。
2004 版
27
经销商内部培训教程
旁通阀式涡轮增压器
2004 版
28
经销商内部培训教程
带中冷器的涡轮增压系统(Bora A4 1.8T)
•增压压力传感器G31-101#三线位 于活性炭罐前 •增压空气再循环(N249)进气管 下灰色 •机械式增压空气再循环阀 •增压压力限制阀(N75):进气软管 上 •增压压力调节单元
5、尾气净化装臵
2004 版
3
经销商内部培训教程
废气再循环系统工作时
废气再循环控制阀N18接收发 动机控制单元发出的相应信 号,并将其转化为一个脉冲 控制信号,来控制再循环阀 的动作。 如果N18出现故障,则废气再 循环系统停止工作。发动机 控制单元可以监测到相应的 故障信息。 如果废气再循环阀出现故障, 因为它是机械阀,所以无故 障记忆。只能通过常规方法 检查。
经销商内部培训教程
进气管调整机构的工作状态
关闭状态 开启状态
2004 版
14
经销商内部培训教程
进气管调整工作原理: 当发动机转速低于4000r/min时(举例), 可变进气歧管活动阀门关闭,空气通过 较长的轨迹进入气缸,管内进气流具有 较大的惯性,起到惯性增压的作用,可 获得较大的扭矩;当发动机转速超过 4000r/min时,ECU给电磁阀信号,使电 磁阀打开,此时进气管内的低压空气进 入到真空膜盒的右恻,而真空膜盒的左 侧与大气相通,因此形成压力差p(p= P 0- P u),使膜片向右移动, 保证足够 从而通过连杆带动活门转动,此 时空 气通过较短的轨迹流入气缸内,可降低 延程阻力,使发动机高速时获得较大的 功率。
2004 版
44
经销商内部培训教程
调整举例(二)- 混合气过稀 •混合气过稀时, 泵在原来的转速 下会泵入较多的 氧,测试室中氧 的含量较多,电 压值下降。
•加大喷油量。
•同时减少单元泵 的工作电流
2004 版
45
经销商内部培训教程
调整举例(二)- 混合气过稀
•为能使电压值尽快 恢复到450mv的电压 值,减小单元泵的工 作电流,使泵入测试 室的氧量减少。
•V.A.G1397A/V.A.G5051
-01-08-115(三档2000转以油 门全开加速绝对压力1.61.7Bar)=V.A.G1397读数
2004 版
29
经销商内部培训教程
增压压力控制
2004 版
30
经销商内部培训教程
增压压力控制阀 N75(旁通阀式增压器)
•进气及排气系统无泄漏 •发动机温度不低于60摄氏度 •全负荷下检查增压压力,测 量时间不超过10秒
2004 版
2
柴油发动机 – 发动机 怠速、中小负荷时将 一定量的废气引入燃 烧室参与燃烧,全负 荷时不起作用。
经销商内部培训教程
有的EGR系统将废气再循环 电磁阀-N18-与 机械阀合二为 一,直接由发动机控制单元 控制。
1、发动机控制单元
2、废气再循环阀(电磁)
3、废气再循环阀(机械) 4、空气流量计
•单元泵的工作电流 传递给控制单元,控 制单元将其折算成 电压值信号。
2004 版
46
经销商内部培训教程
检查氧传感器G39/G130
• • • • 01-08-30-(111 110)第一位1、0变化 01-08-32-(0.06-0.1) 01-08-33-(-0.1 - +0.1; 0.13 - 3.6V) 1-5 = 0.4-0.5V; 2-6 = 77.5欧;5-6、2-5断 – 3-4加热器电阻 2.5-10 欧 • 无负荷时第二氧传感器不工作 • 01-08-36-(0.1-0.95)断电0.4-0.5V该电压要尽量保持 恒定,变化过大会损坏三元催化器