一种改进的变步长电导增量法在光伏MPPT中的应用_解广识
一种变步长扰动观察法在光伏MPPT中的应用

一种变步长扰动观察法在光伏MPPT中的应用张光明;刘毅力;马龙涛;叶炳均【摘要】针对传统扰动观察法的扰动步长选取无法兼顾跟踪速度和稳态精度的缺陷,对传统扰动观察法进行改进,设计了一种变步长扰动观察法.首先分析光伏电池输出的P-U曲线的特点,然后阐述了基于Boost电路实现光伏最大功率点跟踪(MPPT,maximum power point tracking)的控制系统及其工作原理,最后利用Matlab/Simulink搭建基于传统算法以及改进算法的光伏发电MPPT仿真模型,并在同一环境下对这2种算法的跟踪效果进行仿真对比.结果表明,改进的算法有效弥补了传统算法的缺陷,在快速跟踪最大功率点的同时又保证了跟踪的精度,具有良好的动态性能和稳态性能.【期刊名称】《西安工程大学学报》【年(卷),期】2019(033)004【总页数】7页(P433-439)【关键词】P-U曲线;最大功率点跟踪;Boost电路;扰动观察法;变步长;仿真分析【作者】张光明;刘毅力;马龙涛;叶炳均【作者单位】西安工程大学电子信息学院,陕西西安 710048;西安工程大学电子信息学院,陕西西安 710048;国网陕西省电力公司铜川供电公司,陕西铜川727000;西安工程大学电子信息学院,陕西西安 710048【正文语种】中文【中图分类】TM6150 引言随着全球人口的持续增长和经济的不断发展,能源危机和环境污染问题日渐突出,开发研究清洁再生能源已经成为人类社会的共识。
由于光伏发电在发电过程中没有污染和噪声等诸多优点,所以目前成为国内外研究的热点[1-2]。
光伏电池作为光伏发电系统的能量提供单元,其功率输出是随着太阳光照强度以及环境温度的变化而变化的,但是在一定的工作环境下,电池都具有唯一的最大功率输出点,因此为了使电池输出功率最大化,应当实时调节电池的工作点,使其一直工作在最大功率点附近,即MPPT技术[3]。
目前实现MPPT技术的算法有很多,比较常用的传统算法有恒定电压法、电导增量法、扰动观察法[4]。
一种改进的变步长电导增量光伏电源MPPT控制方法

ABS TRACT: h xmu P we on rc ig ( ) r s T eMa i m o rP itT a kn MI )i I
d s n d t x mie e e t c t h tp oo o ti el p o u e e i e o ma i z l cr i ta h tv l c c l r d c , g i y a s S s t mp o e p o o o ac p we f ce c n e u e t e O a o i rv h tv h i o re in y a d rd c h i p oo o a c p w r c s.B c u e t e c mmo et r ai n a d h tv h i o e o t e a s h o n p ru b t n o
o l a h d a t g so e I c o d b ta s u c l r c s n y h st e a v n a e ft n C n , u lo q ik y t k h a t e ma i m o e o n r c u a ey a d se d l,t u h x mu p w r p i t mo e a c r tl n t a i y hs mo e ut b e o n r a e n r e ce c i P s se . r s i l t ic e s e e g a y i f in y n V y t ms MP T o to me h d a e i l td n c mp r d n h s P c n r l t o s r smu a e a d o a e i t i p p r a d t e r s l v r y t e r p d t, sa i t a d a e, n h eut s e f h a ii i y tbly n i
光伏发电全局变步长电导增量法MPPT研究

609
2012 年中国电机工程学会直流输电与电力电子专委会学术年会论文集
图 7 变步长仿真结果
从图 6 中可以看出变步长电导增量法的暂态结束时间在 0.015s, 而定步长电导增量法的 暂态结束时间则是 0.02s,显然变步长电导增量法的搜索速度快于定步长电导增量法,而且 在接近稳态时的震荡现象较之定步长电导增量法也较小。 对外界温度和光照强度发生变化时的情况也进行了分析。假设在 0.025s 时外界温度由 50℃变为 0℃,在 0.05s 时光照强度由 1000W / m2 变为 800W / m2 。仿真结果见图 7、8。
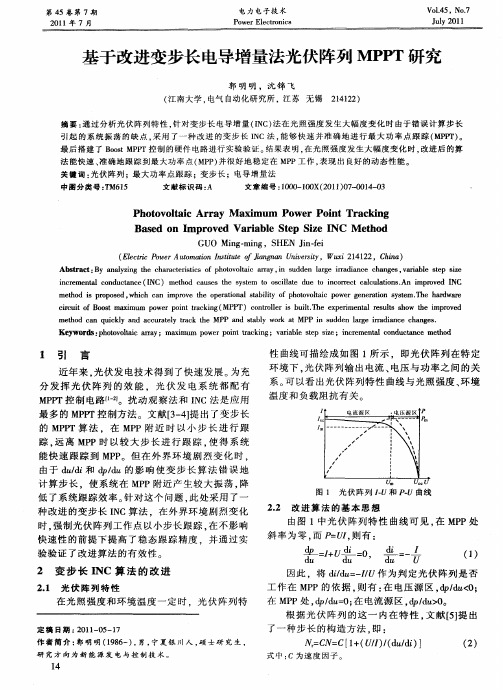
P U
0, 而距最大功率点较远时,
P U
P U
0。
U=
, 其 中
为 步 长 系 数 ,
P=P(k ) P(k 1),U U (k ) U (k 1) 。通过设置合理的 值,电压步长会随着瞬时电压的
变化而自动变化。 (3) 增加稳定工作点判断
当光伏阵列输出功率在最优工作点左右振荡时, 会造成能量损耗并降低太阳能电池的效 率,尤其在外界条件变化缓慢时,长时间在最优工作点左右振荡,能量损耗较多。因此,有 必要设置光伏阵列某一时刻的稳定工作点。 增加程序设置:当
607
2012 年中国电机工程学会直流输电与电力电子专委会学术年会论文集
如图 3 所示。
图 3 定步长电导增量法的控制流程图
(2)
全局变步长电导增量法
为了克服上述定步长电导增量法的不足, 提出一种便于实现的变步长电导增量法。 通过 光伏阵列输出 P-U 特性曲线上各点的斜率的绝对值确定最大功率点跟踪的步长,来同时提 高搜索的稳定性和快速性。 由 P-U 特性曲线知, 在最大功率点附近, 根 据 这 个 思 路 , 设 置 电 压 步 长 为
一种应用于光伏发电MPPT的变步长电导增量法

32 变 步 长 电导 增 量 法 .
采 用 一 种 新 型 的 电导 增 量 法 ,即 变 步 长 的 电 导 增 量法 。其 基 本 原 理 为 : 过 B ot电路 的 占空 通 os 比变 化 来 调 节 太 阳 能 光 伏 阵 列 两 端 的 电压 值 , 使
存 在 唯 一 的 MP 。 图 2 P a为 相 同 , 同 光 照 强 度 不
E条 件 下 。 伏 电池 的 P 曲线 ; 2 光 . 图 b为 相 同 E,
不 同 下 的 P 曲线 。 _
U| V
Ui
() = 5℃, 同E aT 2
() 0 bE=1 0W/ :司r 0 m2, I ,
第4 6卷 第 3期
21 0 2年 3月
电 力 电 子 技 术
P we l cr n c o rE e t is o
Vo . 1 46。No3 .
Ma c 0 2 rh 2 1
一
种应用于光伏发 电 MP T的变步长 电导增量法 P
赖 东升 ,杨 苹
( 南理工 大学 , 华 广东 省绿 色能源 技术 重 点实验 室 ,广东 广 州 504 ) 16 0
40
,x 0p f[ e
]) _一 1
( 1 )
式中 : R 为光伏 电池 的内阻; 为光伏 电池 的并联 电阻 ; 为 见 / o 流 过 二 极 管 的 反 向饱 和漏 电 流 ; 为 波 尔 兹 曼 常 数 , =
一
种 应 用 于 光 伏 发 电 MP T 的 变 步 长 电导 增 量 法 P
2 太 阳 能 光 伏 电 池 特 性
基于改进变步长电导增量法光伏阵列MPPT研究
Ba e o m pr v d Va i bl t p i e I s d n I o e r a e S e S z NC e ho M t d
GUO Mig mig.S N Jn fi n— n HE i — e
( l tcP w r tm t nIs t eo  ̄ nnn U i ri ,Wui24 2 ,C ia Ee r o e o a o ntu f. g a n esy ci Au i it a v t x 1 12 hn )
meh d i r p s d, h c a mp v h p rt n lsa i t f p oo o ac p we e e a in s se T e h r w r t o s p o o e w ih c n i r e t e o e ai a tb l y o h t v h i o r g n r t y tm. h a d a e o o i o
cru f os m x m p w rp i rc i ( P i i o ot ai o e o tt kn MP T)cn l ri b i. e epr n lrsl h w t m rvd ct B mu n a g o t l ulT x e met eut so e ip e o r e s t h i a s h o
Ke wo d : h t v l i ra ;ma i m o rp i tta k n y r s p oo ot c a r y a xmu p we on r c ig;v ra l t p sz a ib e se ie;i c e n a o d c a c t o n r me t c n u t n e meh d l
电导增量法在光伏系统MPPT中的研究

关 键 词 :光 伏 电 池 ; 最 大功 率 点跟 踪 ; 电导增 量 法 ; 稳定性分析 ; B o o s t变 换 器
中 图 分 类 号 :T P 3 9 文 献 标 识 码 :A 文 章 编 号 :1 6 7 4 — 7 7 2 0( 2 0 1 3) 0 7 — 0 0 7 4 — 0 3
Ab s t r a c t :T h e a r t i c l e a n a l y s e s t h e o p e r a t i o n a l f e a t u r e s o f p h o t o v o h a i c c e l l s , t h e t o p o l o g y a n d o p e r a t i o n p r i n c i p l e o f p h o t o v o h a i c
在 光伏 系统 中 , 光 伏 电池 具 有 非线 性 特 征 , 并 且 其
系统 进行 最 大功率 点跟 踪 的整个 过程 。
输 出受 光照强 度 、 环 境温 度影 响较 大 。 为 了提 高 效 率 , 目
前 广 泛 采 用 的 技 术 是 最 大 功 率 点 跟 踪 MP P T( m ̄i mu m p o we r p o i n t t r a c k i n g ) 。 为 了 达 到 更 好 的 稳 定 性 和 更 快 的
K e y wo r d s:p h o t o v o l t a i c c e l l ;ma x i mu m p o we r p o i n t t r a c k i n g;c o n d u c t a n c e i n c r e me n t me t h o d;s t a b i l i t y a n a l y s i s ;B o o s t c o n v e t r e r
改进的电导增量法在光伏系统MPPT中的应用
稳定性 的前提下 , 得光伏 阵列能更快速 、 使 准确 地 跟 踪 最 大 功 率 点 。 关键 词 : 伏 阵列 ; 大 功 率 跟 踪 ; 导 增 量 法 光 最 电
中图分类号 : Hale Waihona Puke M6 5 1 文献标识码 : A
I pr v d I r m e nd c a e M PPT e ho o m o e nc e ntCo u t nc M t d f r Pho o o t i y tm t v la c S se
CAIM i g x a g , I n — in J ANG — n 。 XI e Xi me g , E W i
( .C l g tm t n S i c n eh o o y, o t hn n v ri f 1 o l e f Au o a i ce ea d T c n l e o o n g S uhC ia U ie s y o t T c n lg G a g h u 5 0 4 , u n d n C ia 2 c o l f En iern ce c , eh oo y, u n z o 1 6 0 G a g o g, h n ; .S h o o g n e i g S ine U ie s y o ce c n eh o o y o h n He e 2 0 2 , h iC i a n v ri f S i ea d T c n l f C ia, f i 3 0 6 An u , h n ) t n g
Ab t a t Ac o d n o a a y e t e o t u h r c e it s o h t v lac ( s r c : c r i g t n l z h u p tc a a t rs i fp o o o t i PV) a r y a d t e a v n a e c ra n h d a tg s a d d s d a t g s o h r d t n l x mu p we on r c i g ( PP n ia v n a e ft e ta i o a i ma i m o r p i t ta k n M T)me h d n i r v d i c e n t o ,a mp o e n r me t
一种改进的变步长电导增量法在光伏MPPT中的应用_刘家赢

图 5 改进前后变步长电导增量法仿真结果
由图 5a 可以看出,起动阶段,光伏电池的输 出电压、电流和功率变化相对较大,但响应速度 较理想,在 0. 06 s 左右进入稳态阶段; 当光照从 1 000 W / m2 变为 350 W / m2 时,光伏电池的输出 瞬间有微小变化。上述仿真验证了变步长 IC 法控 制策略的正确性,但从仿真结果看出跟踪过程的
搭建基于 dSPACE 的半实物仿真平台,从而能够
输出电压 /V
32. 2
27. 6
改进变步长
直观有效地看到系统搭建和控制策略的实际运行
电导增量法
输出电流 /A
2. 4
5. 0
情况,并在线调整、优化控制,方便开发和设计。
输出功率 /W
77
138
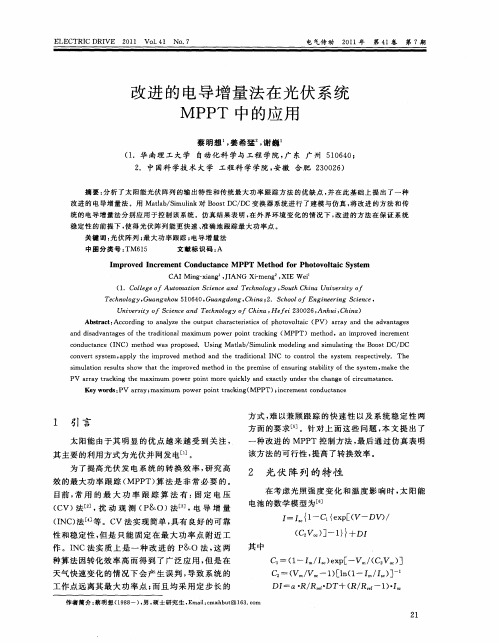
光伏电池数学模型和仿真
1. 光伏电池数学模型 光伏电池是将太阳能转化为电能的模 块,其等效电路[1]如图 1 所示。
图 1 光伏电池等效电路
光伏电池输出特性方程为
{ [ ] } I
=
Iph
-
I0
exp
q nkT
(
U
+
RsI)
-1
-
U + RsI
(1)
Rp
式中,I 为光伏电池工作电流; U 为光伏
电池工作电压; Iph为光电流; I0 为反向饱 和电流; Rs 为串联电阻; Rp 为并联电阻; n 为二极管参数; k 为波尔兹曼常数; q
动。所以设定阈值 M,在变步长 IC 法
控制过程中,通过判断功率变化率与阈
值 M 的大小来确定是否达到 MPP,从
而改善稳态输出,减少振荡。
仿真
依据以上分析,在 Matlab / Simulink 中进行变 步长 IC 法的仿真,如图 4 所示。光伏电池仿真参 数来 源 于 公 司 产 品: YL - LW235,Uoc = 37. 2V, Isc = 8. 45 A,Um = 29. 6 V,Im = 8 A,以上参数都是 标准条件 (T = 25℃,S = 1 000 W/ m2,AM = 1. 5) 下测量的参数。仿真结果如图 5 所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 19 期
解广识 等: 一种改进的变步长电导增量法在光伏 MPPT 中的应用
·39·
云的天气,光照可能在短时间内发生剧烈变化。所 以对于光伏电池阵列来说,其 P-U 曲线是不停变化 的。如图 2 所示,当前工作点电压记为 Ua,阵列输 出功率记为 Pa。当电压扰动方向往右移至 Ub,如果 日照没有变化,阵列输出功率为 Pb,Pb > Pa,控制 系统工作正确。但如果日照强度下降,则对应 Ub 的 输出功率可能为 Pc ,Pc < Pa ,系统会误判电压扰动方 向错误,从而控制工作电压往左移回 Ua 点。如果日 照持续下降,则有可能出现控制系统不断误判,使工 作点电压在 Ua 和 Ub 之间来回移动振荡,而无法跟踪 到阵列的最大功率点。
图 4 电导增量法可能的误判示意图
2. 3 电导增量法误判原因分析
从以 上 分 析 可 以 看
出,电导增量法在光照突
变时,可 造 成 系 统 误 判。
其原因在于用采样值计算
得出的 dP /dU 的值只是其
近似值,在光照突变引起
功率 P 突变时,存在严重 的偏差或错误。如图 5 所 示,在 U = 20 V 时,光照
目前,常用的最大功率跟踪方法有: 固定电压 法、扰动观察法、电导增量法、模糊控制和神经网络 控制等。其中,扰动观察法和电导增量法因效率高且 硬件实现简单而得到了广泛应用。但是,这两种算法 在光照剧烈变化时存在错判的问题。作者提出一种改 进的变步长电导增量法,通过检测电压、电流的变 化,判断光照是否发生突变,在光照突变时,调整控 制策略,提高了最大功率点跟踪控制的效果,从而提 高了光伏电池的利用率。 1 扰动观察法原理及误判分析 1. 1 扰动观察法原理
其中 PV 模 块 的 参 数 如 下: Voc = 44. 8 V; Isc = 8. 33 A; Vm = 35. 2 V; Im = 7. 95 A。光伏模块的初始 工作电压 U0 = 20 V,辐照度 R = 1 000 W / m2 ,在 t = 0. 3 s 时,开启 MPPT 控制,t = 0. 5、0. 7、0. 75 s 时, 光照分别突变为 R = 1 200、1 000、800 W / m2 。仿真
图 5 光照突变时 dP / dU-U 曲线
发生突变,dP / dU-U 曲线存在尖锐的毛刺。
基于以上分析可以看出: 如果能够检测到光照突
变,并对算法进行改进可减少或避免程序误判的情况
出现。
3 改进的变步长电导增量法
3. 1 光照突变检测
相对于光照的变化来说,光伏电池表面温度的变
化是非常缓慢的,因此,在探讨最大功率点跟踪问题
关键词: 光伏系统; 最大功率跟踪; 扰动观察法; 电导增量法 中图分类号: TP273 文献标识码: A 文章编号: 1001 - 3881 (2011) 19 - 038 - 3
Application of Improved Incremental Conductance Algorithm Using Variable Step in MPPT Control of the PV System
情况,可设定一个阈值 δ,当 | dI | > δ 时,认为光照
发生较大变化。
3. 2 变步长电导增量法
作者 设 计 了 一 种 变 步 长 电 导 增 量 法,对 文 献
[7] 的 控 制 算 法 进 行 了 优 化,流 程 图 如 图 6 所 示,
对于扰动观察法亦可进行类似处理。
未检测到光照变化时,若 dU≠0,系统没有工作
解广识,张广明,张进明,周娟娟
( 南京工业大学自动化与电气工程学院,江苏南京 211816)
摘要: 分析了扰动观察法和电导增量法的原理与误判问题,提出一种改进的变步长电导增量法,通过检测电压、电流 的变化,判断光照是否发生突变,在光照突变时,及时调整控制策略,快速跟踪最大功率点变化方向,从而提高最大功率 点跟踪控制的效果,提高光伏电池的利用率。仿真结果表明: 该算法能够快速准确地跟踪最大功率点,并能保证系统的稳 定性。
U( k - 1) ,dI = I( k) - I( k - 1) ,dP = P( k) - P( k - 1) ,设 dU > 0,dP > 0,则 dP /dU > 0,应增加 U。进 入下一采样周期,显然 dU > 0,如果光照没有变化, 则 dP > 0,dP /dU > 0,应增加 U,判断正确; 如果光 照陡然下降且使 dP < 0,则 dP /dU < 0,应减少 U, 事实上应继续增加 U,程序判断出错。
图 3 光伏阵列 dP / dU-U 曲线
2. 2 电导增量法误判可能性分析 同扰动观察法,在环境条件剧烈变化时,电导增
量法也存在误判的可能。如图 4 所示,设当前电压电 流采样值为 U( k) 、I( k) ,功率 P( k) = U( k) × I( k) , 前一采样周期电压电流采样值 U( k - 1) 、I( k - 1) , 功率 P( k - 1) = U( k - 1) × I( k - 1) ,则 dU = U( k) -
中搭建了仿真模型。如图 7 所示。
图 7 Simulink 仿真模型
Abstract: A type of improved incremental conductance algorithm using variable step was proposed based on analyzing the principle and erroneous judgment of the perturbation & observation method and the incremental conductance method. In this algorithm,the change of the solar irradiance could be judged through detecting the variety of the voltage and current. In order to track the maximum power point quickly,the control strategy was adjusted in time according to the solar irradiance and the tracking effect was improved significantly. So the availability of the PV system was increased. The simulated results show that by the method,the maximum power point can be tracked fast and exactly,and the stability of PV system is ensured.
于最大功率点。在最大功率点左ቤተ መጻሕፍቲ ባይዱ ( dP /dU > 0) 时,
·40·
机床与液压
第 39 卷
应当提高工作点电压,即 ΔU > 0。该区域内远离最 大功率点的 dP /dU 变化速度小,为加快逼近速度可 取 ΔU = m1 × ( dP / dU) n,其中 m1 ,n 设置为适当的 常数,n > 1 时,可放大 dP /dU > 1 时的步长,并缩小 dP /dU < 1 时的步长。在最大功率点右侧 ( dP /dU < 0) 时,应当降低工作点电压,即 ΔU < 0,该区域内 dP / dU 变化速率较大,取 ΔU = m2 × dP / dU。经过控 制使 dP = 0 时,此时 dP /dU = 0,系统达到最大功率 点,取 ΔU = 0,可 归 入 ΔU = m1 × ( dP / dU) n。当 dU = 0 时,系统已工作于最大功率点,实现了 MPPT 控制。此时,保持工作点电压不变,ΔU = 0。
结果如图 8 所示。可见,在光照不变与光照突变的情 况下均可较好地实现 MPPT 控制。
图 6 改进的变步长电导增量法流程图 检测到光照变化时,由于电流的变化方向和最大 功率点电压变化方向一致,因此可以取 ΔU = m3 × dI 作为步长数据,可快速追踪由辐照度变化引起的最大 功率点电压变化。
4 仿真及结果分析 为了验证该方法的有效性,在 MATLAB / Simulink
扰动观察法 ( Perturbation and Observation,P&O)
也称为爬山法 ( Hill Climbing,HC) [2],其工作原理 为测量当前阵列输出功率,然后在原输出电压上增加 一个小电压分量扰动后,其输出功率会发生改变,测 量改变后的功率,与改变前的功率进行比较,即可获 知功率变 化 的 方 向。如 果 功 率 增 大 就 继 续 使 用 原 扰 动,如果功率减小则改变原扰动方向。扰动观察法跟 踪情况如图 1 所示。
图 2 扰动观测法可能的误判示意图
2 电导增量法原理与误判分析 2. 1 电导增量法原理
电导增量法[4 -6]是通过比较光伏阵列的瞬时电导 和电导的变化量来实现最大功率跟踪。光伏阵列的 dP / dU-U 曲线如图 3 所示,dP / dU = 0 时为最大功率 点。因此可以得到以下的判据:
{dP /dU = 0,在最大功率点处 dP / dU > 0,在最大功率点左侧 dP / dU < 0,在最大功率点右侧 通过判断 dP /dU 的符号就可以判断光伏阵列是 否工作在最大功率点。在最大功率点处有 dP /dU = 0, 此时保持电压不变; 在最大功率点左侧 dP /dU > 0, 此时应增大输出电压; 在最大功率点右侧 dP /dU < 0, 此时应减小输出电压。
Keywords: PV system; Maximum power point tracking; Perturbation and observation method; Incremental conductance method