DSP6-2
DSP原理及应用(杨风开)部分课后习题解答

1-1程序存储器中保存的是什么?程序的最终表现形式是什么?答:(1)程序存储器中保存的是二进制数据,即物理上的高低电平信号。
(2)程序的最终表现形式是机器码,即用二进制表示的高低电平。
1-2 何为总线?总线的图形表示形式是怎样的?(画图说明)P5 P8答:(1)总线是连接多个设备、供多个设备使用的一系列性质相同的连线。
(2)总线用双线箭头表示。
1-5 计算机系统由哪两部分构成?两大部分间通过什么连接?P5答:(1)由CPU和外设构成;(2)通过总线连接。
1-6 何为单片机?何为DSP?P5 P7答:(1)单片机是将CPU和外设功能集成在一块芯片上的计算机系统;(2)DSP是特殊的单片机,特指数字信号处理器。
1-8 经典的数字信号处理方法有哪些?P7答:(1)时域中的数字滤波(2)时域、频域的快速傅里叶变换(FFT)1-10 区别单片机和DSP的标志是什么?P7答:是加连乘指令。
DSP有加连乘指令而单片机没有。
1-14 DSP有几个移位定标寄存器?作用是什么?P11 P12答:(1)有3个(ACC与a输入数据总线、b输出数据总线、c乘积寄存器之间)(2)作用a使数据在传送过程中按指定方式移位;b按指定方式对数据进行小数处理(定标)数据的移位和定标均在传送过程中自动发生,不需要花费CPU时间。
1-17 在DSP中做乘法运算时,一个乘数必须来自TREG,运算结果保存在PREG。
1-22 DSP有哪3个独立地址空间?每个空间容量是多少?P18答:有程序存储器、数据存储器和I/O。
每个空间容量是64K字。
1-24 DARAM和SARAM有什么区别?P18~20答:(1)DARAM是双访问RAM,SARAM是单访问RAM;(2)DARAM在CPU内部,而SARAM在芯片内部,CPU外部。
1-27 LF25407型DSP片内有多大容量FLASH程序存储器?FLASH程序存储器属于那一部分电路?P22答:有32K容量FLASH程序存储器。
Spartan-6 系列概述

DS160 (v1.6) 2010 年 11 月 5 日 推进产品规范发展
概述
Spartan®-6 系列不仅拥有业界领先的系统集成能力,同时还能实现适用于大批量应用的最低总成本。该系列由 13 个成员组成,可提供 的密度从 3,840 个逻辑单元到 147,443 个逻辑单元不等。与上一代 Spartan 系列相比,该系列功耗仅为其 50%,且速度更快、连接功 能更丰富全面。Spartan-6 系列采用成熟的 45nm 低功耗铜制程技术制造,实现了性价比与功耗的完美平衡,能够提供全新且更高效的 双寄存器 6 输入查找表 (LUT) 逻辑和一系列丰富的内置系统级模块,其中包括 18Kb (2 x 9Kb) Block RAM、第二代 DSP48A1 Slice、 SDRAM 存储器控制器、增强型混合模式时钟管理模块、SelectIO™ 技术、功率优化的高速串行收发器模块、PCI Express® 兼容端点模 块、高级系统级电源管理模式、自动检测配置选项,以及通过 AES 和 Device DNA 保护功能实现的增强型 IP 安全性。这些优异特性以 前所未有的易用性为定制 ASIC 产品提供了低成本的可编程替代方案。Spartan-6 FPGA 可为大批量逻辑设计、以消费类为导向的 DSP 设计以及成本敏感型嵌入式应用提供最佳解决方案。Spartan-6 FPGA 奠定了坚实的可编程芯片基础,非常适用于可提供集成软硬件组件 的目标设计平台,以使设计人员在开发工作启动之初即可将精力集中到创新工作上。
Spartan-6 FPGA 特性总结
• Spartan-6 系列: • Spartan-6 LX FPGA:逻辑优化 • Spartan-6 LXT FPGA:高速串行连接 • 专用于低成本设计 • 多重高效率集成模块 • 优化 I/O 标准选择 • 交错式焊盘 • 大批量塑料焊线封装 • 极低的静态与动态功耗 • 45nm 工艺,专为低成本与低功耗而精心优化 • 零功耗休眠关闭模式 • 待机模式可以保持状态和配置,具有多引脚唤醒、控制增 强功能 • 功耗更低的 1.0V 内核电压(LX FPGA,仅 -1L) • 高性能 1.2V 内核电压(LX 和 LXT FPGA,-2、-3、-3N 和 -4 速度级别) • 多电压、多标准 SelectIO™ 接口 bank • 每对差分 I/O 的数据传输速率均高达 1,080Mb/s • 可选输出驱动器,每个引脚的电流最高达 24mA • 兼容 3.3V ~ 1.2V I/O 标准和协议 • 低成本 HSTL 与 SSTL 存储器接口 • 符合热插拔规范 • 可调 I/O 转换速率,提高信号完整性 • LTX FPGA 内置高速 GTP 串行收发器 • 最高速度达 3.2Gb/s • 支持高速接口,包括:串行 ATA、Aurora、1G 以太网、PCI Express、OBSAI、CPRI、EPON、GPON、DisplayPort 以 及 XAUI 等 • 支持 PCI Express 设计方案的集成端点模块(LXT 器件) • 支持兼容 33MHz、32 位或 64 位规范的低成本 PCI® 技术 • 高效率 DSP48A1 Slice • 高性能算术与信号处理 • 快速 18 x 18 乘法器和 48 位累加器 • 流水线与级联功能 • 用于协助滤波器应用的预加法器 • 集成存储器控制器模块 • DDR、DDR2、DDR3 和 LPDDR 支持 • 数据速率高达 800Mb/s(12.6Gb/s 的峰值带宽) • 多端口总线结构,带独立 FIFO,减少了设计时序问题 • 丰富的逻辑资源和更大的逻辑容量 • 支持移位寄存器或分布式 RAM • 高效的 6 输入查找表可以提升性能和将功耗降至最低 • 针对以流水线应用而设计的 LUT,具有双触发器 • 具有各种粒度的 Block RAM • 快速 Block RAM,具有字节写入功能 • 18Kb RAM 块,可以选择性地将其编程为 2 个独立的 9Kb Block RAM • 时钟管理模块 (CMT),可以提升性能 • 低噪声,高灵活度的时钟控制 • 数字时钟管理器 (DCM),可消除时钟歪斜和占空比失真 • 锁相环 (PLL),可实现低抖动时钟控制 • 频率综合实现倍频、分频和调相 • 16 个低歪斜全局时钟网络 • 简化配置,实现低成本 • 双引脚自动检测配置 • 广泛支持第三方 SPI(高达 4 位宽度)和 NOR 闪存 • 特性丰富的、带有 JTAG 的赛灵思平台闪存 • 多重启动 (MultiBoot) 支持,可以利用多个比特流和看门 狗保护功能进行远程升级 • 更高安全性,可为设计提供强大保护 • 唯一的设备 DNA 标识符,用于设计验证 • 在较大型器件中可进行 AES 比特流加密 • 采用低成本的增强型 MicroBlazeTM 软处理器实现更快速的嵌 入式处理 • 业界领先的 IP 和参考设计
汽车dsp调音教程

汽车dsp调音教程汽车DSP(数字信号处理器)调音是一项复杂而重要的技术,它可以提升汽车音响系统的音质和音效效果。
在这篇教程中,我将为你介绍汽车DSP调音的基本原理和步骤。
1. DSP调音的基本原理汽车音响系统通过音频信号处理器(DSP)来调节音频输入信号,以达到更好的音质和音效效果。
DSP可以控制音量、均衡器、时延、混响等参数,通过调整这些参数来改变音频信号的频率响应、空间表现以及动态范围等特性。
2. 设定初始参数在开始DSP调音之前,首先需要设定初始参数。
这包括音量、高低音控制等基本设置。
确保音量适中,低音与高音平衡,以及其他控制参数处于默认状态。
3. 调整均衡器均衡器是调节音频信号频率响应的重要工具。
在汽车DSP调音中,均衡器可以分为三个频段:低音、中音和高音。
通过调整这些频段的增益,可以改变音频信号在不同频率上的强弱。
一般来说,可以根据个人喜好进行调整。
例如,如果你喜欢低音更强烈一些,你可以适当提高低音频段的增益。
同时,要确保不要过度增强某一个频段,以避免声音失真。
4. 调整时延时延是指声音在不同扬声器之间传播的延迟时间。
汽车音响系统中,一般会有多个扬声器分布在不同位置。
通过调整时延参数,可以使得声音从不同扬声器传递到驾驶员位置时,达到更好的定位效果。
一般来说,驾驶员座位到扬声器之间的距离会长一些,所以需要适当延迟声音。
通过调整每个扬声器的时延参数,并保持合适的时间差,可以实现更好的音场效果。
5. 调整混响效果混响是模拟不同环境下的声音反射效果。
正常情况下,车内是一个相对封闭的环境,声音反射比较少。
但通过调整汽车DSP系统的混响参数,可以增加一些混响效果,使得音频信号更具立体感和环绕感。
一般来说,车内混响的效果不宜过强,过强的混响会使得音频失真、影响听觉清晰度。
6. 音频调试和优化完成以上的基本参数调整后,需要进行音频调试和优化。
在调试过程中,要仔细聆听音频信号的改变,确保音质和效果都得到提升。
DSP28335汇编教程

DSP28335汇编教程当硬件执行指令时,寻找指令所指定的参与运算飞操作数的方式——寻址方式。
根据程序的要求采用不同的寻址方式,可以有效地缩短程序的运行时间和提高代码执行效率。
汇编指令是可执行指令,每一条指令对应一条机器码,用来控制处理器仲的执行部分进行各种操作。
在本章节当中将主要以基于C28x的DSP芯片为例,为读者讲解DSP的寻址方式和汇编指令系统,其中大部分内容也可适用于其他Ti公司的DSP产品。
6.1汇编语言指令集概述在学习C28x系列DSP的寻址方式和汇编指令指令之前,先来对一些基础的知识进行讲解一下先,在汇编程序当中开发人员会常常使用到许多的特殊符号和标志,它们都具有特殊的含义,在学习汇编之前读者们必须先理解这些符号和标志含义,在这里会对其中最常用最重要的操作数符号和寄存器经行详细说明。
在进行汇编讲解之前先来了解一下开发的核心——CPU。
在TMS320C2000系列中,CPU 内核为:C20x/C24x/C240x:C2xLP:C27x/C28x:C27x、C28x这些CPU的硬件结构有一定差别,指令集也不相同,但是,在C28x芯片中可以通过选择兼容特性模式,使C28xCPU与C27xCPU及C2xLPCPU具有最佳兼容性。
可通过状寄存器STl的位OBJMODE和位AMODE的组合,选定模式。
C28x芯片具有3种操作模式:1.C28x模式:在该模式中,用户可以使用C28x的所有有效特性、寻址方式和指令系统,因此,一般应使C28x芯片工作于该种模式。
2.C27x目标——兼容模式:在复位时,C28x的CPU处于C27x目标-兼容模式。
在该模式下,目标码与C27xCPU完全兼容,且它的循环—计数也与C27xCPU兼容。
3.C2xLP源——兼容模式:该模式允许用户运行C2xLP的源代码,这些源代码是用C28x代码生成工具编译生成的。
在下面的讲解当中会牵涉到模式的转换,希望读者要搞清楚每一个模式的对应关系。
温控器PXR说明书
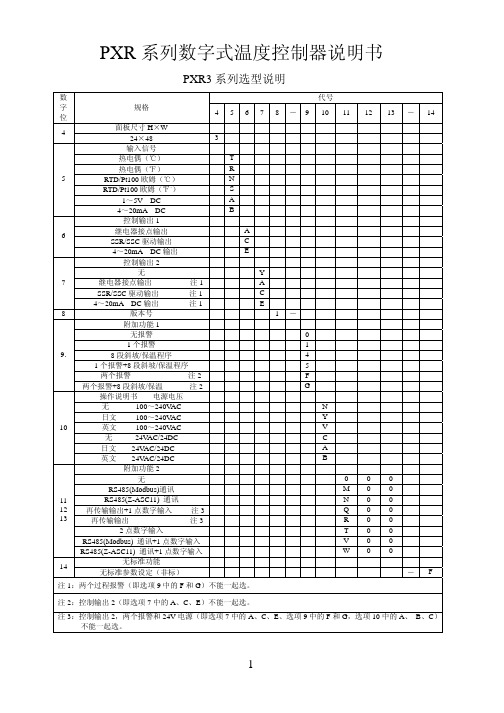
PXR 系列数字式温度控制器说明书PXR3系列选型说明 代号 数字位规格 45678-9101112 13 - 14面板尺寸H ×W 4 24×48 3 输入信号 热电偶(℃) T 热电偶(℉) R RTD/Pt100欧姆(℃) N RTD/Pt100欧姆(℉。
) S 1~5V DC A 54~20mA DC B 控制输出1 继电器接点输出 A SSR/SSC 驱动输出 C 64~20mA DC 输出 E 控制输出2 无 Y 继电器接点输出 注1 A SSR/SSC 驱动输出 注1 C 74~20mA DC 输出 注1 E 8版本号 1- 附加功能1 无报警 0 1个报警 1 8段斜坡/保温程序 4 1个报警+8段斜坡/保温程序 5 两个报警 注2 F 9.两个报警+8段斜坡/保温 注2 G 操作说明书 电源电压 无 100~240V AC N 日文 100~240V AC Y 英文 100~240V AC V 无 24V AC/24DC C 日文 24V AC/24DC A 10英文 24V AC/24DC B 附加功能2 无 0 0 0 RS485(Modbus)通讯 M 0 0 RS485(Z-ASC11) 通讯 N 0 0 再传输输出+1点数字输入 注3 Q 0 0 再传输输出 注3 R 0 0 2点数字输入 T 0 0 RS485(Modbus) 通讯+1点数字输入 V 0 0 111213RS485(Z-ASC11) 通讯+1点数字输入 W 0 0 无标准功能14 无标准参数设定(非标) - F 注1:两个过程报警(即选项9中的F 和G )不能一起选。
注2:控制输出2(即选项7中的A 、C 、E )不能一起选。
注3:控制输出2,两个报警和24V 电源(即选项7中的A 、C 、E 、选项9中的F 和G ,选项10中的A 、 B 、C )不能一起选。
PXR4系列选型说明 代号 数字位规格 45678-910 11 12 13面板尺寸W ×H 4 48×48mm 4 输入信号 热电偶(℃) T 热电偶(℉) R RTD/Pt100欧姆(℃) N RTD/Pt100欧姆(℉。
DSP中文说明书

一、产品概述DSP系列电磁卸荷油脂泵是用直流或交流电源驱动的油脂泵,它通过交(直)流电机和机械传动使柱塞往复运动,将润滑脂不断输出。
该泵最大特点是带有电磁卸荷阀,可与DPQ、DPQX型等干油定量注油器配合使用。
通过程控器,可将润滑脂定时、定量地输送至各润滑点。
该泵内置溢流阀,可有效地保护润滑系统。
该系列润滑泵输出流量大,广泛应用于塑料、行走机械、锻压、工程等机械设备的间隙集中润滑系统。
二、工作原理电动机(直流或交流)带动齿轮减速,通过偏心轮及连杆机构,使柱塞作往复运动。
润滑脂通过吸、排油过程,经过单向阀,一路润滑脂经出油口进入PDI润滑系统,另一路通过卸荷阀(通电时卸荷阀关闭,断电时卸荷阀打开卸荷)回到油罐中。
在PDI润滑系统中,当定量注油器充满润滑脂后,经过一段时间的延时,系统末端的压力开关发出信号给程控器,程控器发出信号给电动机,电动机停止运行,同时,电磁卸荷阀断电卸荷,润滑系统管路中的油脂卸压,定量注油器完成一次注油过程。
三、技术参数出油口螺纹:内NPT1/8使用温度范围:-20℃~60℃加油口形式:快换充脂接头充脂范围:NLGI000#~1#(如在低温下使用,要用低温润滑脂)溢流阀设定压力为10MPa,使用时需确认所接系统定量分配器的最大工作压力,调节溢流阀,使泵的出油口压力与所接系统压力相匹配。
四、外形尺寸DSP-1(带卸荷阀)原理图DSP-1(0.7升)DSP-1(1升)DSP-2(不带卸荷阀)原理图DSP-2(0.7升)DSP-2(2升)五、安装与调试a.电磁卸荷泵的安装与调试1.按照上面外形图的安装尺寸将泵固定好;2.通过充脂口给油泵加油,务必使用指定粘度范围内的清洁润滑脂;3.将电机、电磁卸荷阀、液位开关及电源线按要求接入程序控制器内相应的端子(注意电源电压应与电机、卸荷阀电压相符);4.检查被试泵及系统各接头连接处是否有渗漏,确认程控器、电源以及电磁卸荷阀之间是否按接线要求正确接线;5.开启泵,用扳手旋松“排气阀”排气(注意:人员应避免正对排气口),运行一段时间,将泵体内的空气排尽,直至排气阀口有连续油脂冒出,旋紧排气阀螺钉,接上管路使用;6.切勿将泵体过度倾斜或倒立;7.所有机型电机单次运行时间不大于1分钟,停机时间不小于10分钟。
第6章 DSP软件设计

参数1 参数1 在A中
© Software College , East China Institute of Technology , 2009 HJF
混合编程函数调用规则(续)
汇编器对被调用函数局部帧的分配
局部帧包括局部变量块和局部参数块两部分,其中局部参数块是 局部帧中用来传递参数到其他函数的部分。如果被调用函数没有 局部变量并且不再调用其他函数或需要调用的函数没有参数,则 不分配局部帧。 对于混合编程而言,若被调用函数是手工编写的汇编程序,则局 部帧由编程者自己完成分配,也不需要在堆栈中进行,而编译器 分配局部帧。 结果返回 函数调用结束后,将返回值置于累加器A中。整数和指针在累加 器A的低16位中返回, 浮点数和长整型数在累加器A 的32位中返 回。
© Software College , East China Institute of Technology , 2009 HJF
混合编程函数调用规则(续)
参数传递规则
函数调用前
低
将参数置于参数 表中, 表中,调用函数
被调用者分配局 部帧和参数表
SP SP SP 调用者的 调用者的 参数块 调用者的 调用者的 局部变量 高 (a) (b) (c) 返回地址 参数2 参数2 …… 参数n 参数n 调用者的 调用者的 局部变量 参数1 参数1 在A中 参数数据 局部数据 返回地址 参数2 参数2 …… 参数n 参数n 调用者的 调用者的 局部变量 被调用的
© Software College , East China Institute of Technology , 2009 HJF
混合编程
变量和函数命名规则(续)
在C和汇编混合编程的时候,存在C语言和汇编语言的变量以及 函数的接口问题。 在C程序中定义的变量,编译为.asm文件后,都被归到.bss区, 变量名前面都带一个下划线。在C程序中定义的函数,编译后 在函数名前也带了一个下划线。例如: extern int num变成 extern float nums[5]变成 extern void func ( )变成 .bss _num, 1 .bss _nums, 5 _func
DSP(知识点+思考题)
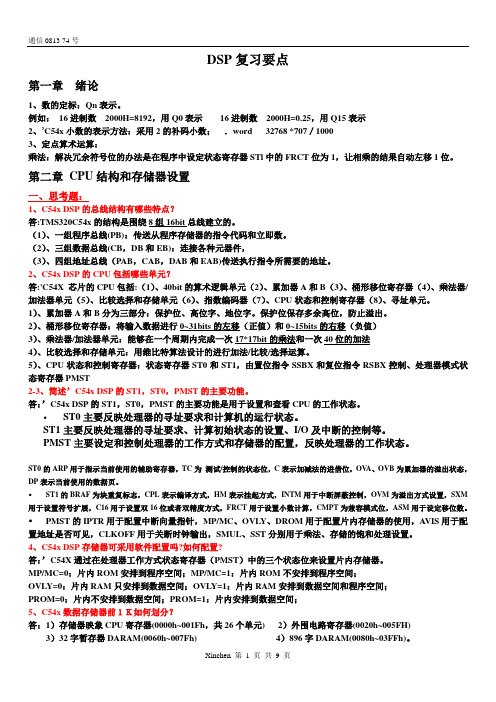
DSP复习要点第一章绪论1、数的定标:Qn表示。
例如:16进制数2000H=8192,用Q0表示16进制数2000H=0.25,用Q15表示2、‟C54x小数的表示方法:采用2的补码小数;.word 32768 *707/10003、定点算术运算:乘法:解决冗余符号位的办法是在程序中设定状态寄存器STl中的FRCT位为1,让相乘的结果自动左移1位。
第二章CPU结构和存储器设置一、思考题:1、C54x DSP的总线结构有哪些特点?答:TMS320C54x的结构是围绕8组16bit总线建立的。
(1)、一组程序总线(PB):传送从程序存储器的指令代码和立即数。
(2)、三组数据总线(CB,DB和EB):连接各种元器件,(3)、四组地址总线(PAB,CAB,DAB和EAB)传送执行指令所需要的地址。
2、C54x DSP的CPU包括哪些单元?答:'C54X 芯片的CPU包括:(1)、40bit的算术逻辑单元(2)、累加器A和B(3)、桶形移位寄存器(4)、乘法器/加法器单元(5)、比较选择和存储单元(6)、指数编码器(7)、CPU状态和控制寄存器(8)、寻址单元。
1)、累加器A和B分为三部分:保护位、高位字、地位字。
保护位保存多余高位,防止溢出。
2)、桶形移位寄存器:将输入数据进行0~31bits的左移(正值)和0~15bits的右移(负值)3)、乘法器/加法器单元:能够在一个周期内完成一次17*17bit的乘法和一次40位的加法4)、比较选择和存储单元:用维比特算法设计的进行加法/比较/选择运算。
5)、CPU状态和控制寄存器:状态寄存器ST0和ST1,由置位指令SSBX和复位指令RSBX控制、处理器模式状态寄存器PMST2-3、简述’C54x DSP的ST1,ST0,PMST的主要功能。
答:’C54x DSP的ST1,ST0,PMST的主要功能是用于设置和查看CPU的工作状态。
•ST0主要反映处理器的寻址要求和计算机的运行状态。
DSP6系统与实验教程_2812的中断

D2 D1 D0
D2--触发极性,1-上升沿; D1—为0,INT13连到定时器1。为1,连到XNMI_XINT13引脚; D0—使能或禁止XNMI中断。1—使能。
INTR指令: INTR INT1,---INTR INT14; INTR DLOGINT,INTR RTOSINT,INT NMI; INT INT0;表示执行复位中断
D11-D0,INT12至INT1应答位,CPU响应中断时自 动置1,需在ISR中写1淸0。
PIE中断标志寄存器(PIEIFRx)—0CE3H,0CE5H,--D7 D6 D5 D4 D3 D2 D1 D0
D7-D0,INTx.y,PIE模块中外设中断请求标志。 响应后自动清0。x为1-12,y为8-1。
PIE控制寄存器(PIECTRL)—0CE0H
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
D14-D1,向量的地址(末位忽略); D0------ENPIE,为1时使能向量表。
PIE中断应答寄存器(PIEACK)—0CE1H
D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
PC(msw) PC(lsw)
中断标志寄存器--IFR
Dx=1时,对应的中断请求信号已发生; Dx=0时,对应的中断请求信号未发生。 CPU响应中断后,对应的中断标志位自动清0。
中断使能寄存器--IER
Dx=1时,对应的中断使能; Dx=0时,对应的中断禁止。 操作方式: extern cregister volatile unsigned int IER;
dsp基础知识

结合信号处理算法的特点,说明DSP是一种特别适合于进行数字信号处理运算的微处理器?答:根据数字信号处理算法的特点,对芯片内部结构进行了特定的优化;它主要应用是实时地实现各种数字信号处理算法。
其中滤波运算的特点是大量的乘加运算;频繁的访问存储器;FFT运算的特点是碟形运算,码位倒置以及大量的乘加、减运算,其中样本按码位倒置的顺序排列,DSP处理器应具有对应的寻址方式,否则读取样本将花费大量的时间频繁的访问存储器,读取系数和样本,保存结果。
大多数信号处理算法都是由滤波、变换、卷积和相关等一些基本的运算构成;很多信号处理任务都要求在限定的时间内完成,即是信号处理的实时性要求。
DSP的特点:1. 高效的内部总线;2. 灵活的寻址方式;3. 单周期乘累加运算;4. 指令流水线;5. 硬件循环;6. 超标量操作等。
2)简述处理器的基本组成,并指出冯〃诺依曼结构和哈佛结构的区别。
处理器的基本组成:中央处理器(CPU)、内部总线结构、功能寄存器、数据存储器、程序存储器、I/O口、串行口、中断系统、定时器;冯.诺依曼结构:采用单存储空间,即程序指令和数据公用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行的;哈佛结构:采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大提高了数据处理能力和指令的执行速度,非常适合与实时的数字信号处理。
3)简述TMS320F2812处理器CPU的组成及特点。
TMS320F2812处理器CPU的组成:保护流水线机制、独立的寄存器空间、算术逻辑单元ALU、地址寄存器算术单元ARAU、桶形移位器、乘法器;TMS320F2812处理器CPU的特点:16X16位和32X32位乘法累加操作、哈佛总线结构、快速中断响应和处理、统一的存储器规划、4M的线性程序地址、4M的线性数据地址、高效的代码(C/C++和汇编语言)、TMS320F24X/LF240X处理器源代码兼容。
DSP综述

4
过去受集成电路技术和数字化器件发展水平限制,限于理论 概念的讲授和仿真。
早期-在计算机上仿真,算法实现。
现在-在DSP上实时处理
介绍的DSP芯片:TMS320LF2812
176脚
5
6
TMS320LF2812的引脚
7
由于DSP具有:
(1)丰富的硬件资源 (2)改进的并行结构 (3)高速的数据处理能力和功能强大的指令系统 已成为世界半导体产业中紧随微控制器(单片机)与嵌入式微处理器(
ARM)之后的又一个热点
嵌入式处理器家族:单片机、DSP、嵌入式微处理器
此外作为控制器的还有:FPGA
8
在通信、航空、航天、机器人、工业自动化、自动控制、网络及家电
广泛应用。
1.2
DSP技术的发展及现状
20世纪60年代初,数字信号处理的基础理论已较成熟,各种应用算法和
快速实现成为应用研究重点。
1965年Cooler和Tukey发明快速傅立叶算法(FFT),使傅立叶分析的速
20世纪90年代中期,Internet网络迅猛发展和高清晰度数字电视的研究 及各种网络通信、多媒体技术的普及应用,极大刺激数字信号处理技术在工 程上实现和推广应用。
与此同时,DSP性能指标不断提高,价格却在不断下降,获得非常广泛
应用,目前已经成为不少新兴科技,如通信、多媒体系统、消费电子、医用 电子等飞速发展的主要推动力
据国际著名市场调查研究公司 Forward Concepts 发布的统计和预
测报告,世界DSP产品市场每年正以30%的增幅大幅度增长。
17
1.3
DSP的应用
自20世纪70年代末诞生以来,飞速发展。价格越来越低,已被广泛应 用。当今的DSP应用市场上,通信设备和网络、多媒体技术等是最大的用 户,一个最典型的应用——手机,可见市场之大。
dsp原理及应用-第6章-C语言和汇编语言混合编程

C语言和汇编语言的结合方式
内联汇编
将汇编语言代码与C语言代 码混编。
汇编语言函数
将汇编语言封装为函数, 用C语言调用。
C语言函数
将C语言封装为函数,在函 数中调用汇编语言子程序。
实例演示:C语言和汇编语言混合编程
1
C语言部分
通过C语言编写程序框架,并进行数据处理等高级任务。
2
汇编语言部分
通过汇编语言实现一些需要底层控制或高性能的部分。
3
代码整合
将C语言和汇编语言的代码整合到一起。
总结和要点
混合编程优点
• 可读性高 • 可维护性高 • 可扩展性强
结合方式
• 内联汇编 • 汇编语言函数 • C语言函数
基本原则
• 注释清晰 • 适当使用内联ห้องสมุดไป่ตู้编 • 预先规划好程序结构
汇编语言是一种低级计算机语言,是计算机指令的助记符。它可以直接操作硬件,能够完成 一些高级语言所不能完成的功能。
混合编程
把C语言和汇编语言结合起来,可以充分利用C语言的高级语言特性,同时也能利用汇编语 言的底层控制能力来处理一些需要精细控制的任务。
为什么需要混合编程
1 提高性能
当C语言性能不能满足需求时,可以使用汇编语言来进行优化,提高程序性能。
2 底层控制
在一些需要底层控制的任务中,汇编语言更为方便和直接。
3 扩展C语言能力
使用汇编语言,可以扩展C语言的能力,实现一些高级语言所不能实现的功能。
混合编程的优点
1
可读性
使用C语言编写程序的可读性很高,而且汇编语言部分可以通过注释来解释各个 部分的作用。
2
可维护性
大多数程序员都能够读懂C语言,并根据需要做出修改,这样也更容易实现程序 的维护。
DSP复习资料+习题+答案
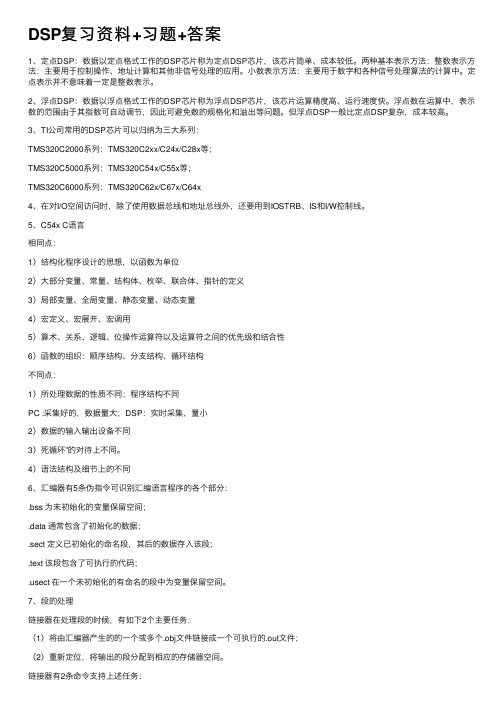
DSP复习资料+习题+答案1、定点DSP:数据以定点格式⼯作的DSP芯⽚称为定点DSP芯⽚,该芯⽚简单、成本较低。
两种基本表⽰⽅法:整数表⽰⽅法:主要⽤于控制操作、地址计算和其他⾮信号处理的应⽤。
⼩数表⽰⽅法:主要⽤于数字和各种信号处理算法的计算中。
定点表⽰并不意味着⼀定是整数表⽰。
2、浮点DSP:数据以浮点格式⼯作的DSP芯⽚称为浮点DSP芯⽚,该芯⽚运算精度⾼、运⾏速度快。
浮点数在运算中,表⽰数的范围由于其指数可⾃动调节,因此可避免数的规格化和溢出等问题。
但浮点DSP⼀般⽐定点DSP复杂,成本较⾼。
3、TI公司常⽤的DSP芯⽚可以归纳为三⼤系列:TMS320C2000系列:TMS320C2xx/C24x/C28x等;TMS320C5000系列:TMS320C54x/C55x等;TMS320C6000系列:TMS320C62x/C67x/C64x4、在对I/O空间访问时,除了使⽤数据总线和地址总线外,还要⽤到IOSTRB、IS和I/W控制线。
5、C54x C语⾔相同点:1)结构化程序设计的思想,以函数为单位2)⼤部分变量、常量、结构体、枚举、联合体、指针的定义3)局部变量、全局变量、静态变量、动态变量4)宏定义、宏展开、宏调⽤5)算术、关系、逻辑、位操作运算符以及运算符之间的优先级和结合性6)函数的组织:顺序结构、分⽀结构、循环结构不同点:1)所处理数据的性质不同;程序结构不同PC :采集好的,数据量⼤;DSP:实时采集,量⼩2)数据的输⼊输出设备不同3)死循环”的对待上不同。
4)语法结构及细节上的不同6、汇编器有5条伪指令可识别汇编语⾔程序的各个部分:.bss 为未初始化的变量保留空间;.data 通常包含了初始化的数据;.sect 定义已初始化的命名段,其后的数据存⼊该段;.text 该段包含了可执⾏的代码;.usect 在⼀个未初始化的有命名的段中为变量保留空间。
7、段的处理链接器在处理段的时候,有如下2个主要任务:(1)将由汇编器产⽣的的⼀个或多个.obj⽂件链接成⼀个可执⾏的.out⽂件;(2)重新定位,将输出的段分配到相应的存储器空间。
第六章DSP片内外设

6.2.2 定时器的控制寄存器TCR
15 ~ 12 11 10 9~6 5 4 3~0
TCR 0026h
保留
Soft
Free
PSC
TRB
TSS
TDDR
保留位
软件调试控制位
预定标 计数器
重新 加载位
停止 状态位
分频 系数
① 保留位:总是读为0; ② 软件调试控制位:控制 调试断点时定时器的工作;
Soft 0 1
6.2 可编程定时器
6.2.1 定时器的结构及特点
• C5402内部有定时器0和定时器1两个定时器。结构一样. • 每个定时器有3个控制寄存器,都是存储器映像寄存器 TIM定时器寄存器:是减1计数器,可加载周期寄存器PRD的 值,并随计数减少。
PRD定时器周期寄存器:PRD中存放定时器的周期计数值,
定时器的中断周期
TCLK (TDDR 1) ( PRD 1)
定时器的工作过程
or 3 or 2
(3) 提供一些必须的特殊功能。如JTAG口、等待状态发生 器等。
片内外设分为两大类: 片内外设:串行接口、定时器、通用I/O引脚和标准主机接 口(HPI8)等。
增强型外设:多通道缓冲串口(McBSP)、主机接口(8位增强
HPI-8、16位增强HPI-16)、直接存储器访问(DMA)控 制器等。 控制寄存器:被映射到数据存储空间的第0页(地址20h~
1、复位PLLNDIV,选择DIV方式。 2、检测PLL状态,即读PLLSTATUS位,若该位为0,表明已经 切换到DIV方式。 3、根据要切换的倍频,选择PLLNDIV,PLLDIV,PLLMUL 的组合。 4、根据所需要的牵引时间,设置PLLCOUNT的当前值。 5、设定CLKMD寄存器。
DSP课后习题问题详解

第一章1.简述典型实时数字信号处理系统组成部分。
答:包括:抗混叠滤波器(Anti-aliasing filter)、模数转换器ADC(Analog-to-Digital Converter)、数字信号处理、数模转换器DAC(Digital-to-Analog Converter)和抗镜像滤波器(Anti-image filter) 。
2.简述X86处理器完成实时数字信号处理的优缺点。
答:利用X86处理器完成实时数字信号处理。
特点是处理器选择范围宽,主板及外设资源丰富,有多种操作系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。
3.简述数字信号处理器的主要特点。
答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。
4.给出存储器的两种主要结构,并分析其区别。
答:存储器结构分为两大类:冯·诺依曼结构和哈佛结构。
冯·诺依曼结构的特点是只有一个存储器空间、一套地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。
哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。
5.简述选择数字信号处理器所需要考虑的因素。
答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。
6.给出数字信号处理器的运算速度指标,并给出其具体含义。
答:常见的运算速度指标有如下几种:(1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。
例如,运行在200MHz的TMS320VC5510的指令周期为5ns。
dsp第六章 DSP通讯接口概述

一、串行通信的基本概念 1、串行通信与并行通信的对比
• 并行通信:数据的各位同时发送或同时接收; 优点:传送速度快; 缺点:不便长距离传送; • 串行通信:按照一定的格式一位一位地顺序传送 数据;在一根信号线上传输。 优点:便于长距离传送; 缺点:传送速度较慢;
串行通信方式连接
通用接收发器USART
– RS232C只是一个通信接口的物理标准,要实现 串行传输,需要并行到串行和串行到并行的转换, 并按照传输协议发送和接收每个字符(或数据 块)。——这些工作可由软件实现,也可用硬件 实现。 – 通用异步接收发送器UART是串行异步通信的接 口电路芯片,IBM PC/XT机的UART芯片是INS 8250,后来使用NS16550。单片机系统中常使 用的同步和异步串行通信接口芯片8251。
• RxD(pin3):接收数据
– 串行数据的接收端
• RTS(pin4):请求发送
– 当数据终端设备准备好送出数据时,就发出有效的RTS 信号,用于通知数据通信设备准备接收数据
• CTS(pin5):清除发送(允许发送)
– 当数据通信设备已准备好接收数据终端设备的传送数 据时,发出CTS有效信号来响应RTS信号
2、RS485
(1)RS-485具有以下特点: –RS-485的电气特性:逻辑“1”以两线间的电压差为+ (2—6)V表示;逻辑“0”以两线间的电压差为-(2— 6)V表示。接口信号电平比RS-232降低了,就不易损坏 接口电路的芯片,且该电平与TTL电平兼容,可方便与 TTL 电路连接。 – RS-485的数据最高传输速率为10Mbps 。 – RS-485接口是采用平衡驱动器和差分接收器的组合, 抗共模干能力增强,即抗噪声干扰性好。 – RS-485接口的最大传输距离实际上可达3000米; – RS-232接口在总线上只允许连接1个收发器,即单站能 力。而RS-485接口在总线上是允许连接多达128个收发 器。
DSP实验6——内存与SDRAM间的二维DMA通信
实验6——内存与SDRAM间的二维DMA通信1. 实验目的了解DMA通信基本原理,掌握内存与SDRAM间二维DMA通信方式及相关控制方法。
2.实验原理:二维DMA将存储区中的数据块作为一个数据阵列进行传输,有利于执行矩阵操作的DSP算法。
若要进行二维DMA传输,对DX、DY寄存器都要进行设置,同时在DP寄存器中使能二维DMA(第27位)。
DX增量寄存器(DX低16位)保存的是偏移值,此值加上当前地址后指向X 维的下一数据元素(下一内循环首址),DX计数寄存器(DX高十六位)保存在X 维方向(循环内部)需要传输的字数,传输一次减一,可以指示当前行中待传输的字数。
DY增量寄存器保存的是Y维方向(外循环)的偏移值,此值加上当前地址可以指示Y维方向上下一个数据元素(下外循环的首址)。
DY计数寄存器初始值是Y 维的传输单元数(外循环次数),每当DX计数器减少至零时,其值才减一。
当Y 计数寄存器内容减为零时,DMA传输完成。
二维DMA的具体执行过程:1〉输出保存在TCB DI寄存器中的当前地址,启动一个DMA存储器周期;2〉在此周期内,将TCB DX增量寄存器中的值与当前DI寄存器中的当前地址相加,产生下一个要访问的数据元素地址,同时更新DI寄存器的值;3〉DX计数器的值减一,然后跳回第二步执行,直至DX计数器值减为零;4〉DX计数器减为零后,DX计数器被重新加载原来的初始值;5〉DY增量寄存器的值加到DI寄存器中的当前地址;6〉DY计数寄存器内容减一,然后从第二步继续开始执行,直至DY计数器减少至零,完成二维DMA传输。
3.相关寄存器说明:TCB寄存器TCB寄存器是一个128位的四字组寄存器,由DI、DX、DY和DP寄存器组成:a)DI是DMA索引寄存器,包括了将要发送或者接收的数据的源地址或者目的地址,既可以指向内部存储器又可以指向外部存储器,也可指向链路口b)DX包含了一个16位(高)的计数值和一个16位的修改量,若使能了二维DMA则该寄存器保存的只是X方向的计数值和修改量c)DY与DX结合一起使用,保存了Y方向上的16位计数值和16位修改量。
6_2 DSP_BIOS:DSP BIOS程序的生成

远见品质
2.2.3 (C6000) 大模式下对象的引用 大模式下变量的存取:
在大模式编译的代码与变量的存储位置是 无关的,如果所有引用对象的代码都是在 大模式下编译的,那么程序可以像存取一 般数据一样存取对象
远见品质
2.2.4 动态建立的DSP/BIOS对象
不是所有的DSP/BIOS对 象可以动态创建,有的 只能在配置工具中创建 #include <tsk.h> XXX_create:为对象的 TSK_Attrs attrs; 内部状态信息分配存储 TSK_Handle task; 空间,并返回一个指向 attrs = TSK_ATTRS; = "reader"; 新建对象的句柄. XXX_Attrs结构的指针 attrs.priority = TSK_MINPRI; 为参数. task = XXX模块的其它函数可 TSK_create((Fxn)foo, 以使用这个句柄引用这 &attrs); 个对象. … XXX_delete函数删除对 TSK_delete (task); 象
远见品质
2.3 DSP/BIOS程序使用的文
件
保存配置的生成文件: program.cdb (被配置工具和分析工具同时使用 ) programcfg.h(配置工具生成的包含对象声明 ) programcfg.h54(汇编头文件 ) programcfg.s54(汇编源文件 ) programcfg.cmd(链接命令文件 ,定义了DSP/BIOS特殊的编译选 项和对象名以及程序段的定义 ) programcfg_c.c(CSL设置的程序代码 ) module.h( DSP/BIOS API头文件,用户程序需要包含std.h和任何 使用模块的头文件) module.h54 (用于汇编程序的DSP/BIOS API 头文件) DSP/BIOS分析工具用到的文件 program.cdb. 配置文件提供了对象名和其它一些程序信息. program.out. 可执行文件提供了符号地址和其它一些程序信息.
惠威dsp6 说明书
惠威dsp6说明书
1、阅读这些规定,注意所有警告,遵守这些规定。
2、注意不要形成热风循环,按建议方法进行安装。
3、请保护好电源线,防止其受到踩踏或挤压,尤其要注意插头、电源插座及其连接设备处。
4、器具耦合器或者电源插头作为断开装置,应保持能方便地操作。
5、通电前必须确保供电电压符合该产品的要求。
6、请勿抛、摔、扔、丢本机,以免造成损坏,
7、机体不防水,应避免掉入水中或雨淋。
8、应避免日晒和尽量远离电磁场。
9、请正确放置电池,并在长时间不使用时将电池取出,以防止漏液,当更换电池时,请先关闭电源。
10、请勿擅自拆卸本机,内有可能伤及您身体的高压。
11、本机未含任何可改装部分,请勿擅自拆卸改装,否则您将失去保修权利。
12、本机可用软布清洁,如有顽固污遗,可用中性洗涤剂进行接洗,请勿使用挥发性汽油或稀释剂,请先关闭电源。
13、为了充分通风,设备周围的最小间隙为30CM,
14、通风孔不应覆盖诸如报纸、桌布和窗帘等物品而妨碍通风。
15、设备上不应放詈棵露的火焰,如点燃的蜡烛。
16、设备不应遭受水滴或水溅,设备上不应放置诸如花瓶一类的装满液体的物品。
17、电池请勿新,旧混用,并只能用同样类型或等效类型的电池来更换,电池废弃时不要乱去,请放入指定的回收箱。
18、设备在常温5℃-60℃条件下可以正常使用。
19、本产品属I类结构产品,必须连接到带保护接地的申网申源输出插座上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s=K
1− z −1 1+ z −1
K +s z= K −s
其中K(或者 为常数 其中 或者C)为常数 , 可根据设计要 或者 为常数, 求选取。 求选取。 由于从S→Z 和从 和从Z→S 的映射规则都是分 由于从 式线性变换,因此称其为双线性变换。 式线性变换,因此称其为双线性变换。 双线性变换完成S平面和 平面的单值映射 双线性变换完成 平面和Z平面的单值映射,这种映 平面和 平面的单值映射, 射是简单的代数关系, 射是简单的代数关系,因此用双线性变换法可以方便地 设计数字滤波器。注意, 设计数字滤波器。注意,它同冲激响应不变法和阶跃响 应不变法映射关系的区别。 应不变法映射关系的区别。
1−z−1 s=2 −1 1+z
0.0007378(1+ z−1)6 = (1−1.268z−1 + 0.7051z−2 )(1−1.010z−1 + 0.358z−2 ) 1 1− 0.9044z−1 + 0.2155z−2
例题二
用双线性变换法设计的数字低通滤波器的幅度特性
例题二
用冲激响应不变法设计的数字低通滤波器的幅度特性
例题二
(2) 用双线性变换法设计数字低通 滤波器。 滤波器。 ① 数字低通技术指标仍为 ωp=0.2π,αp=1dB; dB; ωs=0.3π,αs=15dB ② 模拟低通的技术指标为 T=1s, p=0.2πrad/s,αp=1dB; s=0.3πrad/s,αs=15dB
例题一
(4)利用双线性变换公式,得到数字滤波器系统函数H(z) 利用双线性变换公式,得到数字滤波器系统函数H(z)
H(z) = Ha (s) s= 2 −1+z
T 1+z
0.1908(1+ z−1)4 = (1− 0.9679z−1 − 0.7886z−2 )(1−1.25787z−1 − 0.4909z−2 )
例题一
对数字滤波器的边界频率点预畸, ( 2 ) 对数字滤波器的边界频率点预畸, 得中间模拟滤波器的 设计指标
Ω 据双线性变换频率变换公式: 据双线性变换频率变换公式: = K tan
ω
2
,得到模拟滤波器
性能指标(我们取K=1)。 性能指标(我们取K 通 带: 0
tan(0 16π) -- tan(0.16 ),1dB 波 动
例题二
③设计巴特沃斯低通滤波器。先计算阶 设计巴特沃斯低通滤波器。 dB截止频率 数N及3dB截止频率 c。
N ≥ l 1 g[ 0
01 p . α
=5.884 N取 6
Ωc = (10
−1 ] 01 s . α 1 0 −1 Ωp 2l g( ) Ωs
Ωp
0.1 P α 1 −1) 2N
= (10
例题一
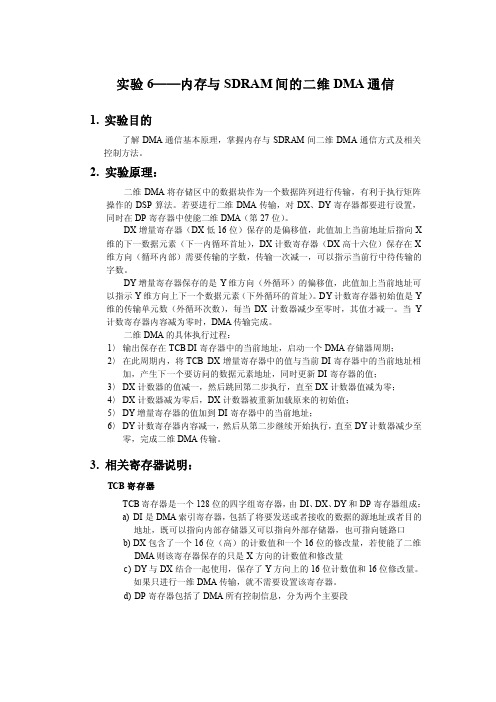
用双线性变换法设计一滤波器滤除心电信号的50Hz的干扰。 用双线性变换法设计一滤波器滤除心电信号的50Hz的干扰。 50Hz的干扰 已知:fs=250 250Hz 已知:fs=250Hz 设计要求: 设计要求: 通 带:0 ~40HZ,1dB 波 动 40HZ, HZ 50HZ HZ~ 15dB 阻 带:50HZ~ 无 穷,≥15dB 衰 减 15 解答: 解答: (1) 确定数字滤波器性能指标 由数字频率和模拟频率的关系ω=ΩT=2πf / fs, 由数字频率和模拟频率的关系ω ΩT=2 fs, 2π × 40 2π ×50 ωp = = 0.32π ωs = = 0.4π 250 250 数字滤波器性能指标: 32π, 数字滤波器性能指标: 通 带:0 ~0.32 ,1dB 波 动 15dB 阻 带:0.4 ~π,15dB 衰 减
例题二
设计低通数字滤波器, 设计低通数字滤波器,要求在通带内频率 低于0 容许幅度误差在1dB以内 以内; 低于0.2π时,容许幅度误差在1dB以内;在频 之间的阻带衰减大于15dB。 率0.3π到π之间的阻带衰减大于15dB。指定模 拟滤波器采用巴特沃斯低通滤波器。 拟滤波器采用巴特沃斯低通滤波器 。 试分别 用冲激响应不变法和双线性变换法设计滤波 器。
tan(0.2π) 阻 带: tan(0.2 ) -- ∞ ),15dB 衰 减 (3) 模拟滤波器设计,我们用切贝雪夫滤波器逼近。 模拟滤波器设计,我们用切贝雪夫滤波器逼近。
Ha (s) =
0.02517 (s 2 + 0.15234 s + 0.2981)(s 2 + 0.3704 s + 0.08445 )
Ωs
0.1 s α 1 −1) 2N
c=0.7032rad/s
例题二
根据阶数N=6 根据阶数N=6,查表得到归一化传输函数为
1 Ha ( p) = 1+ 3.8637 p + 7.4641p2 + 9.1416p3 + 7.4641p4 + 3.8637 p5 + p6
为去归一化, 为去归一化,将p=s/
例题二
③ 设计巴特沃斯低通滤波器。计算阶数N: 设计巴特沃斯低通滤波器。计算阶数N N≥5.306 取N=6
由 N=6、 c、 s、αs 计 算 出 c=0.7662rad/s。 这 样 、 。 阻带技术指标满足要求,通带指标已经超过。 阻带技术指标满足要求,通带指标已经超过。
根 据 N=6, 查 表 得 到 的 归 一 化 传 输 函 数 N=6 Ha(p) 与脉冲响应不变法得到的相同 。 为去归 (p)与脉冲响应不变法得到的相同 与脉冲响应不变法得到的相同。 一化, 代入H (p),得实际的H (s), 一化,将p=s/ c代入Ha(p),得实际的Ha(s),
Ω = K tan Ω1T 2
如上图所示。 如上图所示。
因此, 双线性变换法避免了混叠失真, 因此 , 双线性变换法避免了混叠失真 , 却带来了非线性的频率失真。 却带来了非线性的频率失真。
所以这种方法 不适于设计线性相位的数字滤波器。 ① 不适于设计线性相位的数字滤波器。 ② 它要求模拟滤波器的幅频响应是分段常数型一 般的低通、 般的低通、 高通、带通、带阻型滤波器的频率响应特性) 高通、带通、带阻型滤波器的频率响应特性)。 对于分段常数型滤波器,由于双线性变换法带来的频率失真, 对于分段常数型滤波器,由于双线性变换法带来的频率失真, 各分段边缘的临界频率点产生畸变, 各分段边缘的临界频率点产生畸变,我们要通过频率预畸加以 校正。 校正。 频率预畸是为了保证模拟原型滤波器经过双线性变换后的数 字滤波器,在分段边缘的频率点上与所要求的保持一致, 字滤波器,在分段边缘的频率点上与所要求的保持一致,而将 模拟原型滤波器临界频率点提前加以畸变的过程。 模拟原型滤波器临界频率点提前加以畸变的过程。 预畸公式: 预畸公式:Ω = K tan 为常数。 为常数。
ω
2
为模拟频率, 为数字频率 为数字频率, 其中 为模拟频率, ω为数字频率, K
6.3.2 K值的确定
1 ) 模拟滤波器和数字滤波器的频率特性在低 频部分有较确切的对应关系,即当Ω 较小时有: 频部分有较确切的对应关系,即当Ω1较小时有:
ΩT ΩT Ω = K tan 1 = K 1 2 2
2 =Ω1 Ω =Ω1即: K = T
H(z) = Ha (s) s= 2 −1+z
T 1+z
通常给定的参数为:低通数字滤波器通带边界频率 ωp(或 1p=2πfp) 、阻带边界频率 (或 1s=2πfs)和对应的通 阻带边界频率ωs 或 或 和对应的通 带衰减函数αp、阻带衰减函数αs 其中s 带衰减函数 、阻带衰减函数 ,其中s1平面中的模拟角频 与数字角频率ω的关系 的关系ω= 1T 率 1与数字角频率 的关系
2)在某一特定频率两者有严格对应 例如: 例如:截止频率 ωc
= Ω1cT 即:
Ω1cT ω = K tan c 2 2
Ωc = K tan
双线性变换法设计IIR IIR低通数字滤波 6.3.3 双线性变换法设计IIR低通数字滤波 器的基本原理和算法
对于低通数字滤波器 s = K T为抽样周期
1− z −1 1+ z −1 2 1− z −1 2 −1+ z = = −1 T 1+ z T 1+ z
Ω1T 2 2πTf 2 2 ω Ω = tan = tan = t定指标。 根据要求,设定指标。 2、将各分段频率临界点预畸。 将各分段频率临界点预畸。 3、将数字滤波器性能指标转换为中间模拟滤波器的性能指标。 将数字滤波器性能指标转换为中间模拟滤波器的性能指标。 4、根据设计要求,选定双线性变换常数K(或者C)。 根据设计要求,选定双线性变换常数K 或者C 5、设计中间模拟滤波器的系统函数Ha(s)。 设计中间模拟滤波器的系统函数Ha(s)。 Ha(s) 6、将代入Ha(s)中,得到数字滤波器系统函数。 将代入Ha(s)中 得到数字滤波器系统函数。 Ha(s)
例题二
解 (1) 用冲激响应不变法设计数字低通 滤波器。 滤波器。 ① 数字低通的技术指标为 ωp=0.2π,αp=1dB; dB; ωs=0.3π,αs=15dB ② 模拟低通的技术指标为 T=1s, p=0.2πrad/s,αp=1dB; T=1 p=0 dB; 15dB s=0.3πrad/s,αs=15dB
Ha (s) = 0.2024 (s2 + 0.396s + 0.5871)(s2 +1.083s + 0.5871)(s2 +1.480s + 0.5871)
例题二
④ 用双线性变换法将Ha(s)转换成数字滤波器H(z): 用双线性变换法将Ha(s)转换成数字滤波器 转换成数字滤波器H(z):
H(z) = Ha (s)
代入H 中 得到实际的传输函数H c代入 a(p)中,得到实际的传输函数 a(s),
Ω6 2 Ha (s) = 6 s + 3.8637Ωcs5 + 7.4641Ω2s4 + 9.1416Ω3s3 + 7.4641Ω4s2 + 3.8637Ω5s +Ω6 c c c c c = 0.1209 s6 + 2.716s5 + 3.691s4 + 3.179s3 +1.825s2 + 0.121s + 0.1209