proE和ADAMS的直线振动筛动力学仿真
基于Pro_E和ADAMS的机械手运动学仿真
点 击 Output Type 时 , 出 现 下 一 级 菜 单 , 有 两 种 格 式
Render 和 SLA 可 供 选 择 。
Render 包 含 Pro/E 中 模 型
定义的颜色等信息, 而
SLA 采 用 三 角 化 多 边 形 表
示 Pro/E 模 型表 面 , 没 有 颜
色信息。在本文中选用
图 5 未端位移和速度图 5总结
通过使用接口 软 件 Mechanism/Pro2005, 能 在 Pro/E 中完成零件的三维造型和装配后, 再将模型导入 ADAMS 中, 从而克服了 ADAMS 三维造型能力差的缺点。三维装 配模型导入 ADAMS 中后, 能很好地对机械 手 进行 运 动 学的分析, 能直观地观察到机器人的末端位移和速度。另 外, 也 可 以 对 机 械 手 进 行 静 力 学 、动 力 学等 方 面 的 分 析 , 观察其工作姿态, 判断其运动方案的合理性, 为对机器人 的 其 它 控 制 打 下 基 础 。此 技 术 同 样 可 应 用 到 工 程 机 械 、航 天航空业、国防工业及机械制造业等众多相关领域, 能大 大简化产品开发过程, 缩短开发周期, 减少开发费用和成 本, 提高产品质量。
[ 参考文献] [ 1] 詹 友 刚.Pro/ENGINEER 中 文 野 火 版 教 程 : 通 用 模 块[ M] .北 京 :
清华大学出版社, 2003. [ 2] 郑凯.ADAMS 2005 机械设计高级应用 实例[ M] .北京:机械 工业
出版社, 2006. [ 3] 郑 建 荣.ADAMS— ——虚 拟 样 机 技 术 入 门 与 提 高[ M] .北 京:机 械
工业出版社, 2001. [ 4] 方 建 军. 机 械 动 态 仿 真 与 工 程 分 析- - Pro/ENGINEER Wildfire
基于PROE和ADAMS的变速器动力学仿真
基于PROE和ADAMS的变速器动力学仿真一、本文概述随着汽车工业的快速发展,变速器作为汽车传动系统的核心组件,其性能对整车的动力性、经济性和舒适性具有重要影响。
为了更精确地预测和优化变速器的性能,动力学仿真技术成为了研究和开发过程中的重要工具。
本文旨在探讨基于PROE和ADAMS的变速器动力学仿真方法,通过建立精确的数学模型和仿真环境,分析变速器在不同工况下的动力学特性,为变速器的设计优化和性能提升提供有力支持。
本文将简要介绍PROE和ADAMS两款软件在汽车设计和仿真领域的应用及其优势。
然后,将详细描述变速器动力学仿真的基本原理和流程,包括模型的建立、约束条件的设置、动力学方程的求解等关键步骤。
在此基础上,本文将重点探讨如何利用PROE进行变速器的三维建模,以及如何利用ADAMS进行动力学仿真分析。
通过本文的研究,期望能够为变速器的动力学仿真提供一种有效的方法,为变速器的设计、开发和优化提供有力支持。
也希望能够为相关领域的研究人员和技术人员提供有益的参考和借鉴。
二、PROE软件在变速器建模中的应用PROE(Pro/ENGINEER)是一款功能强大的三维CAD/CAM/CAE系统,广泛应用于产品设计、分析和制造等领域。
在变速器动力学仿真中,PROE软件发挥着至关重要的作用,特别是在变速器建模方面。
PROE软件提供了丰富的建模工具,使用户能够精确地创建变速器的三维模型。
通过利用PROE的参数化设计功能,设计师可以快速地调整模型的尺寸和形状,以满足不同的设计要求。
PROE还支持多种复杂的曲面造型,使得变速器的细节部分能够得到精确的表达。
PROE软件具有强大的装配功能,可以方便地实现变速器内部各个零部件的组装。
设计师可以利用PROE的装配约束功能,确保各个零部件之间的相对位置和运动关系准确无误。
这样,在后续的动力学仿真中,就能够更加真实地模拟变速器的实际工作情况。
PROE软件还提供了丰富的分析工具,可以对变速器模型进行静态和动态分析。
基于ProE和ADAMS的摩擦同步离合器建模及动力学仿真
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
龚春全, 严忠胜, 常震罗, 董鹏, 李强 中国船舶重工集团公司第七一一研究所,上海,200090
机械制造 MACHINERY 2010,48(2) 0次
参考文献(4条) 1.郑建荣 ADAMS--虚拟样机技术入门与提高 2002 2.刘春景.曹卫彬 基于Pro/E与ADAMs的齿轮泵设计及动态仿真 2005(11) 3.徐芳.周志刚 基于ADAMS的凸轮机构设计及运动仿真分析 2007(9) 4.李晓娟 Pro/E与ADAMs联合建模方法的研究 2008(12)
订贸易合同金额相当可观,并结识新客户153家。
泰国展览协会会长说,2010年上海世博会建有一流场
馆,泰国展览协会将会组织泰国企业到上海举办展览,也希
望有更多中国企业到泰国参加展览。
(胡启林)
踮 机械制造48卷 第546期
2010/2圆
万方数据
基于Pro/E和ADAMS的摩擦同步离合器建模及动力学仿真
^以=(一0.069 9∞I+1.2)×105
(1)
M,=(一0.020 8∞i 4-2.432 O∞§
一2.120 7纰一0.080 6)×103
(2)
式中:Me——主动力矩
Mp——从动阻力矩 ∞·——主动件角速度 0)2——从动件角速度
四2010/2
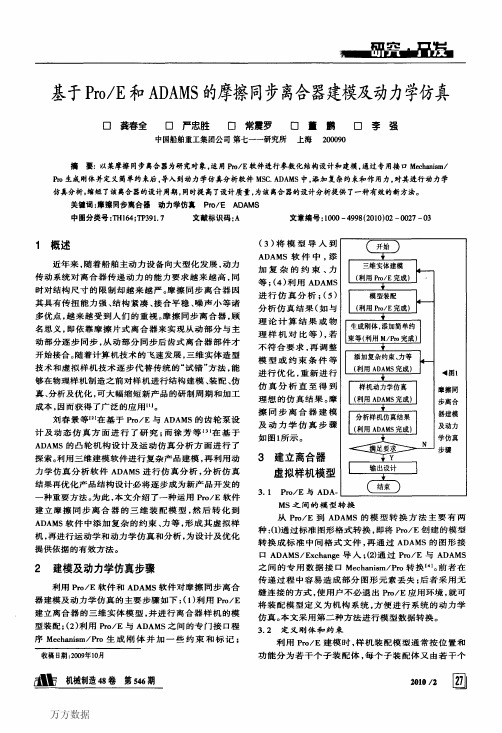
按以上步骤和 方法,摩擦同步离 合器的虚拟样机模 型如图2所示。
摩擦同步离合器在同步接合过程中齿式离合器部 件转矩一时间变化曲线如图6所示。图6再一次证明,摩 擦离合器部件完全同步后齿式离合器部件才开始进入 啮合,才开始传递转矩,与摩擦同步离合器设计构想相 符;同时,由图6看出齿式离合器部件传递的转矩与理
运用ADAMS实现直线摇动筛仿真

2020年6月10日第4卷第11期现代信息科技Modern Information Technology Jun.2020Vol.4 No.11运用ADAMS实现直线摇动筛仿真邹德东(景德镇陶瓷大学 机械电子工程学院,江西 景德镇 333403)摘 要:直线摇动筛主要是用来筛分物料,通过研究直线摇动筛结构特性和运动学特性,进一步研究颗粒物料在摇动筛的运动特性。
借助ADAMS 软件建立直线摇动筛的机构运动,并利用运动仿真和运动学的分析功能,输出相应的构件的位移,速度,加速度随时间变化的规律曲线。
同理,利用ADAMS 分析筛框颗粒物料运动。
通过仿真实验数据及图像对比分析,证明了颗粒物料和筛框运动规律有相似性。
关键词:ADAMS ;筛框;颗粒物料;运动中图分类号:TH12;TP391.9 文献标识码:A 文章编号:2096-4706(2020)11-0168-04Using ADAMS to Achieve Linear Shaking Screen SimulationZOU Dedong(School of Mechanical and Electronic Engineering ,Jingdezhen Ceramic Institute ,Jingdezhen 333403,China )Abstract :The linear shaker screen is mainly used for screening materials. By studying the structural characteristics and kinematic characteristics of the linear shaker screen ,the motion characteristics of the granular material in the shaker screen are further studied. With the help of ADAMS software ,the mechanism movement of the linear shaking screen is established ,and the displacement ,velocity and acceleration of the corresponding component are output with the change of time by using the motion simulation and kinematic analysis function. Similarly ,ADAMS is used to analyze the particle material movement of screen frame. Through the comparison and analysis of simulation data and images ,it is proved that there is similarity between the motion law of particle material and screen frame.Keywords :ADAMS ;screen frame ;material particles ;motion收稿日期:2020-05-150 引 言摇动筛是目前国内处理难筛分物料的机械设备,主要筛分粉体,小颗粒物料等,对比振动筛,摇动筛更能适应难以筛分的物料。
基于ADAMS的振动给料机动力学分析及应用

设计计算DESIGN & CALCULATION78建筑机械 2014.4[收稿日期]2014-01-20[通讯地址]徐怀玉,徐州市经济开发区桃山路29号徐州徐工施维英机械有限公司技术办基于ADAMS的振动给料机动力学分析及应用徐怀玉,郑永生,王志强,李洪聪(徐州徐工施维英机械有限公司,江苏徐州221004)[摘要]以某型移动式破碎站为研究对象,利用动力学仿真软件ADAMS 建立其振动给料机的虚拟样机,对其两种工作状态进行仿真,获得振动位移曲线。
结果表明,该方法求出的结果与实际振动情况基本一致,并得到了给料机共振时的振动状态,为整个给料系统的设计提供了参考依据。
[关键词]振动给料机;ADAMS;共振[中图分类号]TU63+3 [文献标识码]B [文章编号]1001-554X(2014)04-0078-03Dynamic analysis and application of vibrating feeder on the basis of ADAMS XU Huai-yu,ZHENG Yong-sheng,WANG Zhi-qiang,LI Hong-cong移动式破碎站可用于矿山开采及建筑垃圾回收再处理,主要结构如图1所示。
振动给料机作为移动式破碎站的关键部件,主要作用是将块状、颗粒状物料从料斗中均匀、定时、连续地输送到破碎装置中。
目前,移动式破碎站用振动给料机多采用双偏心轴激振器,其结构特点能保证设备承受大块物料下落的冲击,且给料能力大。
图1 移动式破碎站主要结构对于振动给料机的设计,目前只对机械指数、振动频率、振幅、给料速度等参数进行理论计算,而振动给料机启动过程要经过共振区,这时的振动状态参数是设计整个给料系统的关键。
应用解析法计算出启动过程的振动特性非常烦琐,本文利用动力学仿真软件ADAMS对某型号破碎站用振动给料机进行仿真分析,得到动力学参数值,为整个给料系统的设计提供依据。
adams仿真操作详细步骤2【范本模板】

图15
7。
添加marker,如图10所示。
图10
8. 路面生成:
用MA TLAB 7。
0生成C级路面的随机数据。
当汽车以V=20m/s的速度行驶在B
级路面上,,在MATLAB中按图1所示创建有限带宽随机数据产生模块。
图11
然后利用spline样条曲线将所得到的数据导入ADAMS。
9. 添加路面参数,如图9所示。
图12
图13
图14
至此,模型建立完毕,开始分析相关振动特性.
评判标准:
1.车身加速度(舒适性)
车身加速度参数也叫做不舒适性参数,是指经ISO 2631频率加权后的垂向加速度均方根值,可以描述其行驶平顺性(即乘坐舒适性)品质。
2.悬架动行程(弹簧寿命)
悬架动行程参数也叫做悬架动挠度参数,定义为车轮与车身的位移之差的均方根值,用于描述相对于静平衡位置的悬架位移变化程度,它是评价车身姿态变化的指标。
3.轮胎动载荷(安全性)
轮胎动载荷参数定义为相对于静平衡位置的轮胎载荷变化的均方根值,它是评价操纵稳定性的指标。
adams操作细节如图15-20所示。
图15
图16
图17
图18 图15-18为悬架动行程特性的操作过程.
图19为轮胎动载荷特性,前面操作过程与悬架动行程相似,不再赘述。
图19
图20为车身加速度的操作截图。
图20
以上各项操作,点击右下角的OK选项,都会自动生成所需数据.如图21-23所示。
图21 悬架动行程(纵轴单位mm)
图22 车身加速度曲线图纵轴单位mm2)图23 轮胎动载荷(纵轴单位mm)。
pro-e导入ADAMS

基于Adams的内燃机系统动力学仿真2009年02月24日 CAD世界网ADAMS(Automatic Dynamic Analysisof Mechanical System)是美国MDI 公司(2002年被MSC收购)研制的集建模、求解、可视化技术于一体的虚拟样机专业软件。
现在世界上主要汽车制造商都在应用ADAMS数字化虚拟样机软件,它可仿真任何运动系统。
一、引言汽车内燃机作为整车研发中技术含量最高、最核心的技术,开发目标的要求和难度越来越高。
为满足现代汽车内燃机工业的发展需要,必须对传统的以经验加试验的设计方法进行改进。
近年来,虚拟样机技术在内燃机领域获得了越来越广泛的应用。
ADAMS虚拟样机技术的基本应用过程如图1所示。
本文初步实现其中的前期处理部分,通过建立内燃机的虚拟样机模型,利用ADAMS软件对其进行了动力学仿真分析,仿真结果与客观实际相符。
本文应用虚拟样机技术对内燃机模型进行动力学仿真,为汽车内燃机的设计提供了新思路。
二、内燃机虚拟样机建模(一)将三维模型导入ADAMS仿真环境本文采用美国PTC公司的Pro/E作为建模软件,建立的内燃机主体三维模型如图2所示。
然后利用ADAMS/Exchange模块将在Pro/E 中装配好的内燃机模型导入ADAMS/View环境下(先将文件转换为.igs格式),在这个过程中内燃机各个零件之间的装配关系是保持不变的,建立的虚拟样机如图3所示。
(二)2.2材料设置及运动副的施加将三维模型导入ADAMS后,需对模型赋予材料属性,力学属性,再根据实际的运动学关系对发动机模型主要部件之间施加约束,定义构件运动的初始条件,将其定义为机械系统仿真模型,进行系统动力学仿真。
本文创建活塞零件材料为铝合金,其密度和弹性模量设置如图4所示,同理给连杆、曲轴、气阀和凸轮轴设置材料属性。
使用ADAMS/View中的约束库在零件之间创建约束副(Constraint),以确定零件之间的连接情况以及零件之间是如何相对运动的。
proe与adams的联合仿真的要领和技巧

proe与adams的联合仿真的要领和技巧1、ADAMS与Pro/E的接口组合的完整说明Following is a list of possible combinations:1. ADAMS2005 + MECHPro2005 + Pro/ENGINEER Wildfire2.0 (M010) --> Will Work2. ADAMS2003 + MECHPro2005 + Pro/ENGINEER Wildfire 2.0 (M010) --> Will Work3. ADAMS2003 + MECHPro2005 + Pro/ENGINEER 2001 (2002030) --> Will not work since MECHPro2005 does not support Pro/E20014. ADAMS2005 + MECHPro2005 + Pro/ENGINEER 2001 (2002030) --> Will not work since MECHPro2005 does not support Pro/E20015. ADAMS2003 + MECHPro12.0 + Pro/ENGINEER Wildfire 2.0 (M010) --> Will not work6. ADAMS12.0 + MECHPro12.0 + Pro/ENGINEER 2001 (2002030) --> Will Work7. ADAMS2003 + MECHPro12.0 + Pro/ENGINEER 2001 (2002030) --> Will work after changes mentioned in KB 10645 are applied.8. ADAMS12.0 + MECHPro12.0 + Pro/ENGINEER2003 --> Will Work2、ADAMS与Pro/E的接口组合:目前,Proe和Adams能够有效工作的有下面几种组合:2.1. Adams 2005 + Mech/pro 2005 + Pro/E Wildfire 2.02.2. Adams 2003 + Mech/pro 2005 + Pro/E Wildfire 2.02.3. Adams 12 +Mech/pro 12 + Pro/E 20012.4. Adams 12+Mech/pro 12 + Pro/E Wildfire 2.0其中前3种我是总结坛子上的内容,第4种是我根据坛子中提供的超时补丁nmsd,尝试成功的。
ProE与ADAMS仿真讲课教案

ADAMS 与PROE 仿真第一部分:PROE 环境下的运动学仿真1、 根据给定的运动距离、运动时间和修正梯形算法编写轨迹点的生成程序。
导入到ADAMS 和PROE 中的数据是相对于起点时间某时刻处的各关节角度值。
对于PROE ,这个角值是相对于建模过程产生的起始位置,是确定的,而不是通过拖动所到达的任意位置,可以通过运动学仿真获得模型处于起始位置时的姿态,然后给关节添加一个起始角度以达到想要的起始位置。
对于ADAMS ,其起始位置为将模型导入到ADAMS 环境时的姿态。
对于PTP 运动,只需要根据始末点位置要求进行SCARA 机械手的运动学逆解,求得各关节在始末点位置处的角度值及运动过程需要运动的角度,然后根据修正梯形算法和插补周期计算出各关节在各插补时间点处的绝对位置。
对于直线运动,需要使末端执行器在一条直线轨迹上,所以需要进行多次逆解。
逆解过程需要知道末端执行器咋笛卡尔空间内的位置,可以使用向量法来解决这一问题,如下图根据给定的起点可重点坐标和修正梯形模式的轨迹规划,可以确定各插补时间点与起点之间的距离i S 和起点到终点的单位向量i ,所以各插补点的位置向量为i S L a i i1,由此可以确定末端执行器的位置,可以进行运动学逆解,得到各插补点出的各关节绝对位置。
当插补点关节位置求完以后即可导出,导出文件应该为txt 格式,文件形式为两列,第一列为时间,第二列为关节角。
经过导出可以得到4个txt 格式文件,分别对应四个关节,具体的实现程序见程序文件SCARArobotRectangle.m (直线运动)和SCARArobotJoints.m (PTP 运动)。
2、 将生成的轨迹点程序导入到PROE 模型进行运动学仿真首先进入PROE 的机构中为各关节添加伺服电机,时只使用“运动轴”选项为各轴添加电机即可,电机的“轮廓”参数先不用操作,后边会进行更改添加完电机后在左侧的树状模型中找到你添加的电机,然后右击编辑定义,为电机添加运动参数。
空气筛启动过程的动力学仿真
2空气筛动力学仿真
空气筛主要依靠两侧带有偏心块的振动电机做同 步反向转动产生激振力,从而使筛体质心做近似直线 运动,这是一个复杂的空间多自由度系统⑵。
针对空气筛的工作特点,应用Adams软件建立其 动力学模型。其中,筛体模型由Pro/E软件导出.x_t格 式文件,减振弹簧使用Adams中的Bushing轴套连接。
-450.50
-448.75
-447.0
15
水平方向位移/mm
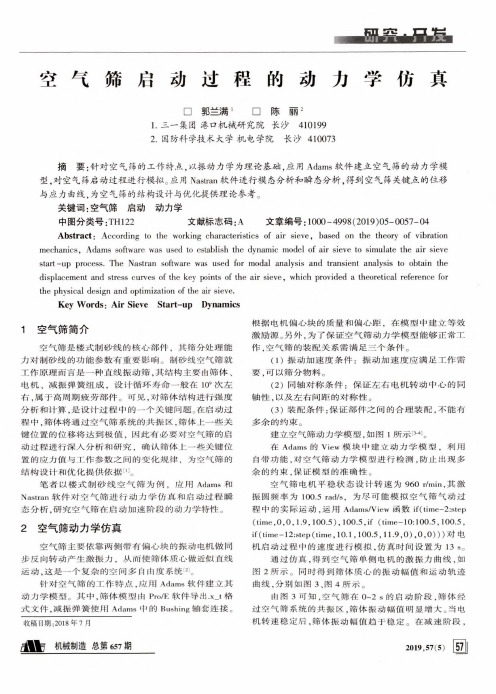
▲图4筛体质心运动轨迹
倍,避开了筛体结构的共振区间。
筛体同样经过共振区,振动幅值增大。在稳态阶段,筛 体振动幅值为3.445 mm,设计振动幅值为3.5 mm,两 者基本相符。
4空气筛瞬态响应分析
对空气筛进行动力学分析,以往多采用谐响应分
(3) 装配条件:保证部件之间的合理装配,不能有 多余的约束。
建立空气筛动力学模型,如图1所示「T。 在Adams的View模块中建立动力学模型,利用 自带功能,对空气筛动力学模型进行检测,防止出现多 余的约束,保证模型的准确性。 空气筛电机平稳状态设计转速为960 r/min,其激 振圆频率为100.5 rad/s,为尽可能模拟空气筛气动过 程中的实际运动,运用Adams/View函数if(time-2:step
关键词:空气筛 启动 动力学
中图分类号:TH122
文献标志码:A
文章编号:1000-4998(2019)05-0057-04
Abstract: According to the working characteristics of air sieve, based on the theory of vibration
【资料】解决ADAMS和CATIA、Proe、UG的连接问题
ADAMS 中的测量ADAMS 中的测量在用ADAMS模拟仿真过程中或过程之后,可以定义一些测量量。
模型中几乎所有的特性量都可以被测量,如弹簧提供的力,物体间的距离、夹角等。
在定义了这些测量量后,当进行仿真时,ADAMS/View自动显示出测量量的曲线图,使用户可以看到仿真和测量的结果。
在ADAMS中,测量分为两类,一类是ADAMS预先定义好的,一类是用户可以自己定义的。
1.1 预定义的测量(Predefined Measures)预定义的测量包括:对实体对象的测量(Object Measures)——可以测量模型中关于零件、力、约束的各种特征量。
对点的测量(Point Measures)——可以测量关于点的各种特征量,如该点在全局坐标系中的位置,或作用在点上的合力等。
点到点的测量(Point to Point Measures)——可以测量一个点相对另一个点的运动学特征量,如相对速度、相对加速度。
对姿势的测量(Orientation Measures)——可以测量用已知描述方法描述的不同坐标系下的位姿,已知的描述方法包括绕固定坐标系连续转动的方法、Euler 参数法、Rodriguez 参数法等等。
对角度的测量(Included Angle Measures)——可以测量空间任意三点所组成的角度,也可以测量两个向量间的角度。
范围的测量(Range Measures)——可以测量其它测量量的统计量,如其它测量量的最大值、最小值及平均值。
表2-2、2-3、2-4、2-5 具体列出各种预定义的测量所能测的特征量。
表2-2 可测量的实体特征量表2-3 可测量的点的特征量表2-4 可测量的点到点的特征量表2-5 可测量的姿势的特征量1.2 用户自定义的测量用户自定义的测量(User-Defined Measures) 包括:ADAMS/View computed measure——是用户定义的设计表达式,表达式中可含有ADAMS/View 中的任意变量,ADAMS/View 在仿真中或仿真后对其进行求算。
基于Pro_e和ADAMS的新型模具抛光机构的运动仿真
第23卷第1期 黑 龙 江 工 程 学 院 学 报(自然科学版) Vol.23№.12009年3月 Journal of Heilongjiang Instit ute of Technology Mar.,2009基于Pro/e 和ADAMS 的新型模具抛光机构的运动仿真邱 卉,许小村(哈尔滨理工大学机械工程学院,黑龙江哈尔滨150080)摘 要:大型模具抛光是模具加工和调试过程中的重要工序。
目前大型模具的抛光主要以手工为主,抛光效率低且质量不稳定,模具手工抛光已成为高质量大型模具制造业发展的瓶颈。
针对大型模具加工设计一种新型半自动化抛光机构,采用Pro/Engineer 和ADAMS 软件对所设计的模具抛光机构进行运动仿真及力学分析,结果表明:该机构具有多自由度、可自由定位、随遇平衡等优点,且省时、省力。
关键词:模具抛光;运动仿真;Pro/e ;ADAMS中图分类号:T G 7 文献标识码:A 文章编号:167124679(2009)0120008203Motion simulation of die polishing mechanismbased on Pro/e and ADAMSQ IU Hui ,XU Xiao 2cun(Mechanical Engineering College ,Harbin University of Science and Technology ,Harbin 150050,China )Abstract :Polishing is st udied which is t he key to t he restriction of t he surface quality and service life of t he die following t he rapid develop ment of industry of mould manufact ure in recent years.A kind of semi 2auto 2mation polishing mechanism is designed to take t he place of t he hand polishing which is used now p reser 2ving it s advantage of multi 2angle ,multi 2degree 2of 2f reedom ,free location and indifferent equilibrium.This article uses t he simulation analysis software of Pro/e and ADAMS to design ,motion simulation and motion analysis of t he mechanism.And at last we can confirm t hat t his mechanism can meet all aspect s require 2ment of t he hand polishing ,and having t he advantage of time saving and labor saving.K ey w ords :polishing mechanism ;motion simulation ;Pro/e ;ADAMS收稿日期:2008209226基金项目:黑龙江省教育厅科研项目(11511059)作者简介:邱 卉(1982~),女,硕士研究生,研究方向:机械制造及自动化. 近年来,模具工业的发展越来越迅速。
ADAMS系统测量与仿真和仿真后处理.

4种类型的仿真分析 :
静态分析(static) 装配分析(Assemble)
仿真操作工具
仿 真 工 具
仿真操作按钮
仿真类型
仿真参数设置
仿真时间 仿真频率
仿真参数设置栏 仿 真 控 制 对 话 框
仿 真 分 析 参 数 设 置
恢 复 起 始 状 态
页的操作
操作工具
后 翻
前 翻
新 建
删 除
视窗的操作
视窗布置 选择视窗 放大视窗 转移视窗内容 删除视窗内容
对象结构关系及其转性编辑
Modeling项包括与仿真样机 有关的各种对象类型,例如: 构件、运动副、作用力等
Plotting项包括与绘制数 据曲线图有关的各种对 象类型,例如:曲线、 标题等。
停 止
Default为默认
开 始 Dynamic动力学 分析 Kinematic运动 学分析 Static静态分析 End Time停止的绝 对时间 Duration开始仿真 分析到停止的时间 间隔 Step Size时间步长 Steps步数
检验样机模型 检验方法和工具
样 机 信 息 窗 口
仿真再现
ADAMS/PostProcessor的进入
在ADAMS/View主工具箱,选择后处理工具图标 ;
在Review菜单,选择Plotting Window,启动并显示ADAMS /PostProcessor窗口。 退出: 结束ADAMS/PostProcessor操作,返回到ADAMS\View 程序,可以选择图标 。
操作工具 基点 照相
绘制 轨迹
三、 仿真后处理
1、 ADAMS系统仿真后处理的进入、组成
基于Adams的振动磨主振系统动力学仿真与优化

基于Adams的振动磨主振系统动力学仿真与优化夏正清;王玉婷;林枫;杨小兰【摘要】为解决振动磨工作时能耗及噪声大的问题,需要对振动磨进行优化.设计一种中凸形弹簧,替换现用的普通螺旋压缩弹簧.并利用Adams对振动磨模型进行动力学仿真和比较.研究证明,主振弹簧的优化对振动磨机的能源利用有明显的提高,优化后的振动磨能耗得到降低,经过多次试验,振动磨能耗降低20%.利用噪声测试仪对优化前后的振动磨进行检测,噪声降低9 dB.【期刊名称】《南京工程学院学报(自然科学版)》【年(卷),期】2018(016)001【总页数】5页(P39-43)【关键词】振动磨;Adams;主振弹簧;动力学仿真【作者】夏正清;王玉婷;林枫;杨小兰【作者单位】南京工程学院机械工程学院,江苏南京211167;南京工程学院机械工程学院,江苏南京211167;南京工程学院机械工程学院,江苏南京211167;南京工程学院机械工程学院,江苏南京211167【正文语种】中文【中图分类】TH113.1振动磨是一种粉磨设备,它通过激振器驱动磨筒高频振动,带动筒内磨介对物料产生激烈的挤压、摩擦和剪切等作用,从而实现对筒内物料的破碎、研磨、细化.振动磨在航空航天、粉末冶金、材料和医药等不同领域的超细微粉制备中,都有着广泛的应用.但是采用粉碎法对超硬粉体进行超细微研磨尚停留在微米级的水平,因此微米级被业内称为极限[1-2].双质体振动磨机是在普通振动磨机基础上进行优化得到的一类超细粉磨设备,主要由上质体主振系统和下质体隔振系统构成,可以承受更大的激振力,也能更好地减少对地基的冲击,但由于它的自由度和弹簧较多,使得对其的动力学研究较之前更为复杂.振动磨由于自身质量大、所受载荷变化大,工作状态复杂,以及常受到不同机械力、热应力等因素的影响,使得振动磨在工作状态下的噪声大、能耗高、轴承、导柱等零部件易坏、激振源故障频发.虽然在德国GOCK教授后有许多学者对振动磨机进行改进,获得了一定的推广和进步[3-4],但是近年来对振动磨的改善和优化并未产生根本性的工业化进展.对于目前振动磨超细微粉碎技术的不足,想要解决超硬粉体超细微化问题,对振动磨系统施加一定高频率振动和高强度振动是一种较为有效的方法,但同时仍会遇到一些问题,比如噪声大、功耗大,需要对其进行优化,获得更小的能耗和较为舒适的工作环境.虚拟产品开发以及虚拟制造技术的逐渐成熟,使得计算机仿真技术得到越来越广泛的应用.采用数字化虚拟样机技术对所研究模型的零部件及整机性能进行计算机仿真并获取到相关数据,可以降低产品开发风险、节约实体样机制造成本、缩短产品设计周期.目前数字化虚拟样机技术在设计制造及优化仿真方面具有很大的优势.本文以试验室双质体振动磨样机为研究对象,从振动磨的主振系统着手,进行动力学仿真与优化比较,并将优化应用于实际,以得到较为理想的粉磨效果.1 振动磨的结构与原理图1 双质体振动磨结构图如图1所示,试验室所研究振动磨机为双质体振动磨机,主要包括磨筒、上质体板、下质体支架、固定底板、主振弹簧、隔振弹簧、振动电机、导柱等零部件.振动电机由电动机和两组偏心块组成,通过调节变频器改变振动电机的转速,控制振动磨的激振频率;通过调整主、副偏心块之间的夹角,可改变振动电机激振力的大小,从而达到控制振幅大小的目的.下质体依靠隔震弹簧对底座有着减振作用,以降低对地基产生的负荷和噪声.工作时,振动电机由变频器控制,驱动电机里的偏心块高速旋转,产生惯性离心力,带动上质体做一定振幅和频率的连续振动.振动磨筒随着上质体一起振动,使得筒内的研磨介质和粉体受到强烈的挤压、磨削、冲击等作用,从而达到粉体研磨细化的目的,橡胶帆布复合弹簧作为隔振装置以减小振动磨对地基的冲击[5].主振系统由磨筒、上质体板、导柱、主振弹簧等部分组成,隔振系统由下质体支架、导柱、隔振弹簧、固定底板等组成,见图1.因为普通等节距螺旋压缩弹簧制造简单,制造成本低,所以振动磨一般采用普通螺旋压缩弹簧作为主振弹簧,用来连接上下质体.隔振弹簧通常采用的是橡胶帆布复合弹簧,这类弹簧具有低刚度、大阻尼、非线性等特点,能有效吸收主振系统传递给下质体的强振,这样可以减少强振对底座和地基的冲击,从而达到隔振系统减振、降噪的作用.2 主振系统建模及仿真图2 双质体振动机三维模型图Adams具有可视化界面Adams/View、高效的求解器Adams/Solver以及功能强大的后处理模块Adams/Postprocessor等[6-8],再加上SolidWorks可以更为方便进行建模和装配[9-10],所以利用这两个软件进行主振系统的建模和仿真.对试验室振动磨机进行实际测量,利用SolidWorks对振动磨进行建模.首先对每一个零部件进行建模,然后装配,再导入Adams进行参数设置.在导入和参数设置过程中,进行部分的简化和优化,主要是对部分零件进行整合,将连接件以及零件的细节特征进行忽略等,建模流程为:零件建模、装配→预导入→简化、优化→导入→参数设置.建成的模型见图2.图3 振动磨机虚拟样机图图4 上质体质心在Y-Z平面的位移曲线图5 上质体质心Y方向位移随时间变化曲线图6 上质体质心Z方向位移随时间变化曲线把建好的振动机模型导入Adams进行参数设置,以电机轴方向为X,垂直于X的平面竖直方向为Y,水平方向为Z;由于Adams有弹簧设置模块,在实际导入时可省去弹簧和橡胶复合弹簧;为了更加直观地看到电机和偏块的运动状态,省去电机壳.导入后,给模型各部分进行名称定义;对每部分进行质量设定,由于建模时省略了部分连接件,所以在定义质量时,需要考虑这些连接件的重量;对模型进行弹簧的添加,由于Adams的弹簧和实际弹簧相比,只有轴向刚度、没有径向刚度,所以在设定主振和隔震弹簧时,在上、下质体两侧各添加了横向的弹簧作为径向刚度;对各个部分进行约束设定,控制每部分的运动方向和旋转方向;对电机添加旋转运动.完成后的模型见图3,分析及参考试验经验,对模型的部分参数设置见表1,上质体、偏块、下质体质量分别为180、20、35 kg.表1 振动磨机基本参数表弹簧刚度/(N·mm-1)阻尼主振弹簧轴向(×6)14.330.01两侧(×2)40.000.03隔振弹簧轴向(×4)30.000.10两侧(×4)20.000.01对建模进行仿真,得到相关位移图形,如图4至图6所示.从位移图形可以看出,当振动磨开始工作时,振动磨质心在Y方向和Z方向上的位移均呈逐渐减少的趋势,在平面内的运动是无序的;当振动磨机工作稳定时,上质体质心做近椭圆形运动,Y方向的振幅为18 mm,Z方向最大振幅为7 mm,振动幅度较小,到达工作状态的时间为10 s,能源利用率偏低.3 主振系统优化仿真与比较振动磨在工作过程中耗能严重、噪声过大等问题亟待解决,相对简单的隔振系统,已经进行过部分优化设计[11-12],本文主要从主振系统着手进行优化,根据主振弹簧相关资料及分析[13],发现非线性弹簧和普通螺旋压缩弹簧相比有很好的节能作用;中凸形弹簧的实际压并距离大于节距,有助于防止并圈、减少噪声。
基于Pro_E和ADAMS的齿轮减速器动力学仿真_刘爱敏

煤矿机械Coal Mine MachineryVol.32No.09Sep.2011第32卷第09期2011年09月前言目前,有基于不同CAD 支撑软件的二级直齿圆柱齿轮减速器设计,包括:MasterCAM 、AutoCAD 、Pro/E 等,每种CAD 支撑软件下又有不同的设计方式。
其中Pro/E 是美国PTC 公司开发的一款三维设计软件,是目前国际上最先进、最成熟使用参数化造型技术的大型CAD/CAM/CAE 集成软件。
该软件集三维模型设计、加工、分析及绘图于一体,有强大的二次开发能力和第三方软件的支持。
本文运用Pro/E 软件对某二级齿轮减速器进行三维建模,利用ADAMS 软件对其进行动力学仿真,并将仿真结果与理论计算值进行比较,验证了动力学仿真的正确性。
1齿轮减速器的三维参数化实体建模(1)关键零部件的实体建模对减速器来说,齿轮是其关键零部件。
对于圆柱直齿渐开线齿轮的造型,齿轮外轮廓为渐开线,必须通过参数方程来控制曲面的生成,因而可以通过在Pro/Program 中编程,自定义特征参数,控制参数来实现曲面的造型,并保存为零件的特征模板文件,图1为齿轮减速器大齿轮的三维实体建模。
轴的设计采用旋转法设计,对于参数化设计与一般造型的不同点就是在草绘界面时,必须对各段轴进行定义,对各段轴设定参数。
键槽的设计首先需要创建一个基准面,基准面与键槽的底面重合,然后在基准面上拉伸切除材料,拉伸以键槽的上下表面为界面,同时键槽也要实现参数化,这就需要对基准面平移的距离和键槽的尺寸设定关系式,图2是其中输入轴的三维实体建模。
图1齿轮的三维实体建模图2输入轴的三维实体建模其他零部件如滚动轴承、上箱体、下箱体的三维实体建模暂不做介绍。
(2)零部件的虚拟装配虚拟装配就是利用零部件的链接关系建立装配。
首先进入Pro/E 原始界面,单击“新建”按钮,打开“新增”图框,在“类型”栏选择“组件”,在“子类型”栏选择“实体”,取消“使用缺省模板”选项,在“新增选项”图框的模板下选取mmns-part-solid 选基于Pro/E 和ADAMS 的齿轮减速器动力学仿真刘爱敏1,韩衍昭2,王丽萍1(1.郑州航空工业管理学院机电工程学院,郑州450015;2.郑州航空工业管理学院,郑州450015)摘要:齿轮减速器在工程机械中应用极其广泛,但设计效率较低。
基于ADAMS的圆振动筛运动特性仿真分析

第 34 卷第 04 期 2013 年 04 月
煤矿机械 Coal Mine Machinery
Vol.34No.04 Apr. 2013
问题探讨
基于 ADAMS 的圆振动筛运动特性仿真分析
周靖皓 1, 周毅钧 1, 张欢乐 2
(1. 安徽理工大学 机械工程学院, 安徽 淮南 232000; 2. 南京林业大学 信息科学技术学院 , 南京 210000)
振动筛左侧的电动机开启时, 由于皮带的带动,振 动器开始运转,带动偏心块转动,从而带动整个筛
40~70,常用 Hs=45~50; S— ——形状系数,S=(D-d)/(4h)。
机工作。
橡胶弹簧的最大变形量 Δh=(4~6)mm, 对于小
型筛 Δh=14mm。
(2)模型的导入
运用 Pro/E 建立模 型,创建筛箱 、振 动 器 、前 支
1 845.00
1 836.25
1 827.50
-15 00100.0
20.0
30.0
40.0
50.0
时 间 /s
图 6 筛箱在 z 方向上的加速度与时间的关系
由图形可以看出, 筛箱的 y 和 z 方向分别做的
是正余弦运动,这样就形成了圆轨迹运动。 并求得
激振器在转速为 880 r/min 下的 y 方向、z 方向上的
Ea— ——橡胶的拉压弹性模量, Ea=iG=3.6(1+1.65S2)G
支撑,筛面与地面成 20°。 筛箱和支座之间通过橡胶
G— ——橡胶的剪切弹性模量,
弹簧连接,共有 8 个橡胶弹簧,为了使筛箱的振动
G=0.117e0.034Hs
adams运动仿真教学

起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参3.53.数;On ground Length :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数 2 bod——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。