硬件在环汽车驾驶模拟器系统开发
ADAS实验平台硬件在环仿真
10.16638/ki.1671-7988.2019.09.012ADAS实验平台硬件在环仿真*许广吉,石晶(辽宁工业大学汽车与交通工程学院,辽宁锦州121000)摘要:高级辅助驾驶(Advanced Driver Assistant System,ADAS)可以在很大程度上降低交通事故,减少人员伤亡和不必要的经济损失。
因此,各个汽车厂以及高校对ADAS进行研发。
文章进行ADAS实验台进行搭建,并且能过实现MA TLAB/Simulink、NI-Veristand和CarSim软件的联合仿真。
关键词:ADAS实验平台;仿真中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)09-42-02ADAS experimental platform hardware in the loop simulation*Xu Guangji, Shi Jing(College of Automobile and Transportation Engineering, Liaoning University of Technology, Liaoning Jinzhou 121000 )Abstract: Advanced Driver Assistant System (ADAS) can greatly reduce traffic accidents, casualties and unnecessary economic losses. Therefore, each automobile factory as well as the university carries on the research and development to the ADAS. In this paper, the ADAS experimental platform was built and the joint simulation of MA TLAB/Simulink, ni-veristand and CarSim software was realized.Keywords: ADAS experimental platform; The simulationCLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)09-42-02前言高级驾驶辅助系统(Advanced Driver Assistant System,ADAS),是基于安装在汽车上的各种传感器,在汽车行驶的过程中收集车内外的数据、辨识静态和动态物体,进行运算和分析并将相关信息反馈给驾驶者或进行相关的辅助决策,从而提高汽车行驶的安全性[1]。
硬件在环技术在汽车上的应用研究
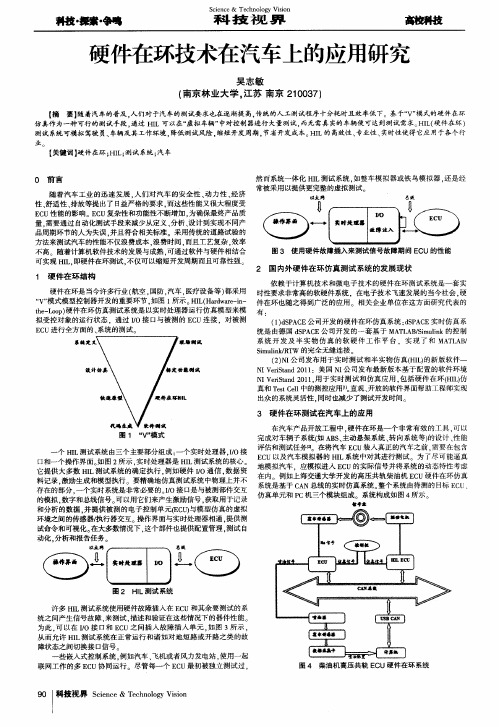
在汽车产品开放工程 中. 硬件在环是 一个 非常有效的工具 , 可以 完成对车辆子系统 口A B S 、 主动悬架系统 、 转 向系统等) 的设计 、 性能 评估和测试任务[ 2 1 在将汽车 E C U装入真正的汽车之前 , 需要 在包含 E C U以及汽车模拟器 的 H I L系统 中对其进行测试 。为 了尽可 能逼真 地模拟汽车 .应模拟进入 E C U的实际信号并将系统的动态特性考虑 在内 例如上海交通大学开发 的高压共轨柴油机 E C U硬件在环仿真 系统是基于 C AN总线的实 时仿真系统。 整个系统由待测 的 目标 E C U、 仿 真单元和 P C机三个模块组成 。系统构成如 图 4所示。
● t●
④
。
许多 H I L 测试 系统使用硬件故障插 入在 E C U和其余要测试 的系 统之 间产生信号故障 . 来测试 . 描述和验证在这些情况下 的器件性能 。 为此 . 可 以在 I / O接 口和 E C U之 间插入故 障插 入单元 , 如图 3所示 , 从而允许 H I L测试 系统在正常运行和诸 如对 地短路或开路之类 的故 障状态之间切换接 口信号 些嵌入式控制系统 . 例如汽车、 飞机或者风力发电站 , 使用一起 联网工作的多 E C U协同运行 。尽管每一个 E C U最初被独 立测试 过 ,
④
图 3 使用硬件故障插入来测试信号故障期间 E C U的性能
2 国 内外硬 件在 环 仿 真 测试 系统 的 发 展现 状
依赖于计算机技术和微 电子技术 的硬件在环测试系统是一套 实 硬件在环是当今许 多行业 ( 航空 , 国防 , 汽车 , 医疗设备等 ) 都采用 时性要求非常高的软硬件系统 .在电子技术飞速发展的当今社会 . 硬 “ v” 模式模 型控制器开发的重要环节 . 如图 i 所示 。 H I L ( Ha r d w a r e — i n — 件在环也 随之得到广泛 的应用 相 关企业单位在这方面研究代表 的 t h e 一 p ) 硬件在环仿真测试系统是 以实时处理器运行仿真模型来模 有 : 拟受控对象的运行状态 .通 过 I / 0接 口与被测的 E C U连接 .对被测 ( 1 ) d S P AC E公司开发的硬件在环仿真系统 : d S P A C E实时仿 真系 E C U进 行 全 方 面 的 、 系 统 的 测试 。 统是由德 国 d S P A C E公司开发 的一 套基于 MA T L A B / S i mu l i n k的控制 系统 开 发及 半实 物 仿 真 的软硬 件 工作 平 台 ,实 现 了和 M A T L A B / j I境定
BMS硬件在环仿真平台搭建方案

BMS硬件在环仿真平台搭建方案一、硬件在环测试概述现代汽车电控系统开发一般都采用虚实结合的开发流程。
其中硬件在环HIL (Hardware-in-Loop)仿真技术对纯电动汽车各控制系统的开发有着重要意义。
硬件在环技术,可以提高系统开发效率、降低系统开发难度与成本、提高开发质量、减少系统开发风险。
通过将系统中的关键硬件与复杂的仿真模型集成,可以并行开发系统软件、硬件,进行性能评估和各种测试。
包括系统极限测试和严酷环境测试等。
所以硬件在环技术已成为现代采用并行工程开发车辆控制系统不可缺少的一环。
作为一种虚实结合调试和验证控制单元的开发平台,硬件在环仿真系统首先应该包括一系列非常友好的用户界面以便用户设置参数来选择功能、显示结果和进行文档处理等等;其次作为一种系统控制平台应能合理地调度系统中存在的各种程序线程,从而提高硬件在环仿真系统的响应速度。
并且作为一种调试和验证硬件的系统控制平台,它还应具有驱动硬件接口卡的能力,根据对硬件在环仿真系统控制平台的要求和开发系统控制程序的难易程度。
二、硬件在环仿真平台搭建步骤硬件在环仿真环境针对用户的被测车型进行建模仿真,并将其运行于与控制器闭环工作的实时环境中,实现对各个电控单元的复杂测试。
这种测试手段的好处在于:将测试过程从试验台架中分离、模拟被控对象的各种工况、模拟复杂的故障模式、快速重现故障模式、实现多个控制器的集成测试、实现测试自动化、易于维护和扩展测试能力。
硬件在环仿真原理如图1所示,在传统测试中,BMS和真实被控对象(动力电池、实车)形成闭环系统进行控制;在硬件在环仿真测试中,BMS和仿真系统(硬件和软件)形成闭环系统进行控制。
由于硬件在环仿真系统使用了仿真模型替代真实的被控对象,因此仿真模型必须精确地提供仿真被控对象的性能,包括其输入、输出特性,响应特性等等。
使用硬件在环仿真的用户必须为仿真控制对象建立可运行的实时模型。
图1 硬件在环仿真原理现有的商业模型都提供了参数化的实时模型,用户只需要修改参数就可以完成大部分模型的设计工作。
自动驾驶汽车硬件在环仿真实验平台研发

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and Management第38卷第2期2021年2月Vol.38 No.2 Feb. 2021DOI: 10.16791/j.c n k i.s j g.2021.02.027自动驾驶汽车硬件在环仿真实验平台研发雍加望K2,冯能莲3,陈宁1(1.北京工业大学北京市交通工程重点实验室,北京100124;2.清华大学汽车安全与节能国家重点实验室,北京100084; 3.北京工业大学环境与生命学部,北京100124)摘要:自动驾驶汽车作为重点竞争领域将是今后一个时期内国内外汽车工业发展的主流趋势。
为使学生更全面地理解并掌握自动驾驶汽车关键技术,研发了自动驾驶汽车硬件在环仿真实验平台(A V H1L)。
A V H I L硬件层面集成了实车制动系统、转向系统、传感器系统以及网络通信系统,可提供完整的整车硬件在环实验环境;A V H IL 软件层面以M A T L A B/S im u lin k为核心构建快速控制原型算法,基于P r e S c a n软件提供虚拟现实界面和环境感知类传感器模块,利用C a r S i m软件实时运行整车动力学模型。
A V H I L为自动驾驶上层控制算法与底层执行机构的开发与测试、高级驾驶辅助系统开发与测试、驾驶员行为特性研究等提供了实时高效的仿真平台,为本科生教学与研究生实践奠定了实验基础。
关键词:自动驾驶;硬件在环;仿真;实验平台中图分类号:U467.3文献标识码:A文章编号:1002-4956(2021)02-0127-05Development of hardware-in-the-loop simulation experimentalplatform for automatic driving vehicleY O N G J ia w a n g1,2,F E N G N e n g lia n3,C H E N N in g1(1. B e ijin g K e y L a b o ra to ry o f T ra ffic E n g in e e rin g, B e ijin g U n iv e rsity o f T ech n o lo g y, B e ijin g100124, C h in a;2. S tate K e y L a b o ra to ry o f A u to m o tiv e S a fe ty a n d E n erg y, T sin g h u a U n iv e rsity, B e ijin g100084, C h in a;3. F a c u lty o f E n v iro n m e n t a n d L ife, B e ijin g U n iv e rsity o f T e c h n o lo g y, B e ijin g100124, C h in a)Abstract: A s a k e y c o m p e titio n a r e a, th e a u to m a tic d r iv in g v e h ic le w ill b e c o m e th e m a in tr e n d o f th e d e v e lo p m e n t o f a u to m o b ile in d u s tr y a t h o m e a n d a b r o a d in th e n e x t p e r io d. In o r d e r to e n a b le s tu d e n ts to u n d e r s ta n d a n d m a s te r th e k e y t e c h n o lo g ie s o f a u to p ilo t, a h a r d w a r e-in-th e-lo o p s im u la tio n e x p e r im e n ta l p la tf o r m(A V H IL) is d e v e lo p e d. T h e h a r d w a r e le v e l o f A V H IL in te g r a te s th e r e a l v e h ic le b r a k in g s y s te m, s te e r in g s y s te m, s e n s o r s y s te m a n d n e tw o r k c o m m u n ic a tio n s y s te m, w h ic h c a n p r o v id e a c o m p le te v e h ic le h a r d w a r e-in-th e-lo o p e x p e r im e n ta l e n v ir o n m e n t. A t th e A V H IL s o f tw a r e le v e l, th e r a p id c o n tr o l p r o to ty p e a lg o r ith m is c o n s tr u c te d w ith M A T L A B/ S im u lin k a s th e c o r e. T h e v ir tu a l r e a lity in te r fa c e a n d e n v ir o n m e n t s e n s in g s e n s o r m o d u le a r e p r o v id e d b a s e d o n P re S c a n s o f tw a r e, a n d th e v e h ic le d y n a m ic m o d e l is ru n in r e a l tim e b y C a r S im s o f tw a r e. A V H IL p r o v id e s a r e a l-tim e a n d e f f ic ie n t s im u la tio n p la tf o rm fo r th e d e v e lo p m e n t a n d te s t o f th e u p p e r c o n tr o l a lg o r ith m a n d th e u n d e r ly in g a c tu a to r, d e v e lo p m e n t a n d te s t o f a d v a n c e d d r iv in g a s s is ta n c e s y s te m a n d r e s e a r c h o f d r iv e r b e h a v io r c h a r a c te r is tic s, w h ic h la y s a n e x p e r im e n ta l fo u n d a tio n f o r u n d e r g r a d u a te t e a c h in g a n d g r a d u a te p r a c tic e.Key words: a u to m a tic d r iv in g; h a r d w a r e-in-th e-lo o p; s im u la tio n; e x p e r im e n ta l p la tf o r m世界汽车工业发展围绕着“安全、舒适、节能收稿日期:2020-05-15基金项目:北京工业大学交通工程科研基地开放探索项目(2019BJUT- JTJDS012);汽车安全与节能国家重点实验室开放基金课题(K F2010);北京工业大学教育教学研究项目(ER2011-A03 )作者简介:雍加望(1988—),男,安徽巢湖,博士,讲师,主要从 事自动驾驶汽车、汽车动力学与稳定性控制方面的研究。
基于dSPACE的EPS系统ECU硬件在环实验台设计与应用

基于dSPACE的EPS系统ECU硬件在环实验台设计与应用吕荣辉;石维佳;张宏超【摘要】硬件在环仿真测试是ECU研发过程中重要一环,对其性能调试起着关键作用.文章重点阐述基于dSPACE的EPS(电动助力转向)系统ECU(电控单元)硬件在环仿真试验台的设计与应用.基于dSPACE硬件在环仿真器,构建了EPS ECU的硬件在环仿真试验台.通过整合dSPACE系统内部车辆动力学仿真模型与改进的转向系统模型,获得更为接近实车的汽车动力学仿真模型.基于所设计的试验台,对某开发的EPS ECU进行离线测试并分析其性能表现.结果表明,该ECU能较好地满足汽车对转向轻便性、路感及回正性能的要求.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)002【总页数】4页(P114-117)【关键词】EPS系统;硬件在环;试验台设计;模型整合;离线仿真测试【作者】吕荣辉;石维佳;张宏超【作者单位】河北工业大学机械工程学院,天津300130;河北工业大学机械工程学院,天津300130;中国汽车技术研究中心,天津300300【正文语种】中文【中图分类】U461.9CLC NO.:U461.9Document Code:AArticle ID:1671-7988 (2017)02-114-04 随着汽车电子控制技术的不断成熟,电动助力转向(Electric Power Steering,EPS)得到了快速的发展。
凭借自身高效率、低能耗、易调控等优点[1],被广泛地应用于各类汽车之中。
作为EPS系统重要组成部分、决定助力转向电机扭矩分配的电子控制单元(Electric Control Unit ,ECU),更是其研究开发的核心,直接影响着车辆的高速稳定性及操作轻便性[2]。
在投入大规模生产之前,ECU必须经过反复的测试。
硬件在环(Hardware In the Loop,HIL)仿真系统具备模拟被控对象及其环境、短时间内对控制器进行各种模拟工况条件下的自动化测试等特点,应用在实时控制系统的开发和测试当中可以大大地缩短研发周期和减约开发成本。
硬件在环_dSPACE培训
dSPACE 应用 当今的开发流程- V循环
功能设计 标定
dSPACE 原型 实验室与车载测试的可靠方案 Hardware-in-the-Loop 通过自动代码生成工具可以在几分钟内把 框图变成实时的实验 多种规格的硬件 适用于不同的计算能力与I/O要求 快速控制原型 目标代码生成
dSPACE 应用
开关 (操作, 停止) 增量编码器信号
Real-Time Interface Compiler ControlDesk
汽车研发:整车控制器(VCU)策略及开发流程
汽车研发:整车控制器(VCU )策略及开发流程!摘要:纯电动汽车整车控制系统以VCU为中心,电池、电机及充电系统为外围辅助系的一套完整的电控系统。
随着汽车纯电动汽车的发展,将来对VCU的要求会越来越高。
电动汽车资源网讯:整车控制器是电动汽车各个子系统的调控中心,协调管理整车的运行状态, 也是电动汽车的核心技术之一。
就像真正的美女是需要智慧与美貌并存,光有身材,哪怕前凸后翘,S型,xiong器逼人,也只能从肉体上感觉很诱人,可远观却无法多沟通,这就是大家常说的胸大无脑,而VCU就是汽车的大脑,能够让汽车变得智能化,更懂你,可远观也可亵玩焉!今天,漫谈君就和大家聊一聊,整车控制器(VCU )开发的方法和流程。
、VCU的作用与功能在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。
此外, 可通过行车充电和制动能量的回收等实现较高的能量效率。
在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。
因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
1、VCU主要功能.接收驾®S指令,輸岀电机I区前扭矩, 实现躯动系统控制★整车能■分配及优化S理*监测和协调管理车上其他用电器★故障处理及诊断功能★系统状态仪裘显示亠*整车设备營理1)整车能量分配及优化管理;根据驾驶员的具体操作和实际工况对车辆进行管理、优化及调整,以实现优化能量供给,延长车辆使用寿命,提高车辆运行经济性。
2 )故障处理及诊断功能;对出现的异常情况进行诊断、提示和主动修复工作。
3)系统状态仪表显示;4)整车设备管理监控各设备运行状态,及时进行动态调整。
5)系统控制根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。
汽车稳定性控制系统硬件在环仿真

汽车稳定性控制系统硬件在环仿真汽车稳定性控制系统是现代车辆的重要安全装置之一,它能够帮助驾驶员在复杂路况中更好地控制车辆,提高行车安全性能。
本文将介绍汽车稳定性控制系统的原理、硬件在环仿真的概念及其在汽车稳定性控制中的应用前景。
汽车稳定性控制系统通过采集车辆的状态信息,如车速、转向角、横摆角速度等,判断车辆的行驶状态,从而控制车辆的各个执行器,如制动器、发动机等,以保持车辆的稳定性。
该系统通常由传感器、控制器和执行器组成。
传感器负责监测车辆状态信息,控制器根据传感器输入计算控制量,执行器则根据控制量对车辆进行相应的调整。
硬件在环仿真是一种有效的开发手段,它通过模拟汽车控制系统的工作环境,对控制系统进行测试和验证。
在硬件在环仿真中,控制器、传感器和执行器均由模拟器代替,测试人员可以输入各种工况下的模拟信号,观察控制系统的响应和执行情况,从而对控制策略进行调整和优化。
通过硬件在环仿真,我们可以观察到汽车稳定性控制在不同工况下的表现。
例如,在紧急避障情况下,稳定性控制系统应能迅速判断出车辆的行驶状态,并采取相应的控制措施,以保持车辆的稳定性。
通过仿真结果分析,可以验证稳定性控制系统在不同情况下的响应速度和控制效果,从而评估其性能。
汽车稳定性控制系统对于提高车辆的安全性能具有重要意义。
硬件在环仿真作为一种有效的开发手段,能够模拟汽车控制系统的工作环境,对控制策略进行测试和验证。
通过仿真结果分析,可以评估稳定性控制系统的性能,为实际应用提供参考。
随着汽车控制技术的发展,硬件在环仿真在汽车稳定性控制中的应用前景将更加广阔。
随着汽车技术的不断发展,汽车控制系统日益复杂。
为了提高汽车控制系统的开发效率和可靠性,硬件在环仿真(Hardware-in-the-Loop Simulation,简称HILS)被广泛应用于汽车控制系统开发中。
硬件在环仿真能够在原型设计阶段对控制系统进行仿真测试,及早发现并解决潜在问题,从而缩短开发周期、降低开发成本。
基于SCANeR软件的硬件在环仿真平台构建
收稿日期:2023-09-10
DOI:1019999/jcnki1004-0226202311021
1 前言
频注入的测试方案。前ቤተ መጻሕፍቲ ባይዱ是采用相机成像原理,通过实
自动驾驶汽车是一种通过电脑系统实现无人驾驶
际视角内的图像缩放到屏幕上,然后通过设置合理的光
的智能汽车,是未来无人驾驶技术实现商业化落地的附
的传递途径,并开发了多种用于模拟各种试验工况和运行环境的标准法规测试场景;最后结合该硬件在
环测试平台,对某款 ADAS 控制器的 LDW 场景进行测试验证,结果表明,该平台能很好地对 ADAS 控
制算法进行功能测试,能够缩短企业 ADAS 控制算法的开发周期并降低验证成本。
关键词:ADAS 控制器;SCANeR 场景软件;NI PXI 总线;硬件在环
Custom Device 模块直接控制 I/O 接口,实现 SCANeR 场
景软件与实时系统以及被测控制器的信号交互,同时利
用 VeriStand 可以完成对整个仿真测试变量的监控、试
验数据的处理和分析等;被测控制器与实时系统采用
CAN 总线的方式通信,借助 VeriStand 进行 DBC 文件的
统,并基于 Matlab/Simulink 软件搭建的 UDP 通信模型
及 VeriStand 中 Custom Device 模块构建的自定义模型,
实现 NI 实时系统与交通场景的信号交互,其中 Veri⁃
Stand 和 UDP 模型如图 4 和图 5 所示。
图 4 VeriStand 部署界面
· 79 ·
测试平台。系统原理图如图 1 所示,主要由视频暗箱、
ADAS 系统的开发验证提供了必要的指导作用,但由于
基于多时间尺度的电动汽车硬件在环仿真平台
引用格式:杨凯, 林永君, 白青飞, 等. 基于多时间尺度的电动汽车硬件在环仿真平台[J]. 中国测试,2022, 48(8): 101-108. YANG Kai, LIN Yongjun, BAI Qingfei, et al. Electric vehicle hardware-in-the-loop simulation platform based on multiple-time scale[J].China Measurement & Test, 2022, 48(8): 101-108. DOI: 10.11857/j.issn.1674-5124.2021060184基于多时间尺度的电动汽车硬件在环仿真平台杨 凯, 林永君, 白青飞, 陈 鑫, 李 静(华北电力大学 新能源电力系统国家重点实验室,河北 保定 071003)摘 要: 随着电动汽车数量的快速增长,其大规模无序接入将使电网电能质量与运行稳定性显著降低,为此对集群电动汽车充放电与并网行为的研究显得尤为重要。
针对上述问题,基于多时间尺度搭建一种车网协同硬件在环仿真平台,平台利用电网实时仿真器实现电网实时仿真,以实时数据库为桥梁,连接上层能量管理系统、下层仿真模型以及硬件设备,并基于实时数据库可视化界面对仿真运行结果进行直观展示,最后,基于所搭建平台对V2G (电动汽车到电网)、V2B (电动汽车到智能楼宇)、V2H (电动汽车到家庭)等典型场景进行算例仿真验证,仿真结果可为车网协同优化调度提供支持。
关键词: 多时间尺度; 数据库; 能量管理; V2B; 仿真平台中图分类号: TM615;TP183文献标志码: A文章编号: 1674–5124(2022)08–0101–08Electric vehicle hardware-in-the-loop simulationplatform based on multiple-time scaleYANG Kai, LIN Yongjun, BAI Qingfei, CHEN Xin, LI Jing(State Key Laboratory of New Energy Power System, North China Electric Power University, Baoding 071003, China)Abstract : With the rapid growth of the number of electric vehicles, its large-scale disordered access will significantly reduce the power quality and operation stability of the power grid. Therefore, it is particularly important to study the charging and discharging and grid connected behavior of cluster electric vehicles. In order to solve the above problems, a vehicle network collaborative hardware in the loop simulation platform is built based on multi time scales. The platform uses the power grid real-time simulator to realize the power grid real-time simulation. The real-time database is used as a bridge to connect the upper energy management system, the lower simulation model and hardware equipment. The simulation results are visually displayed based on the real-time database visualization interface. Based on the platform, the typical scenarios such as V2G (electric vehicle to power grid), V2B (electric vehicle to intelligent building), V2H (electric vehicle to home) are simulated and verified. The simulation results can provide support for vehicle network collaborative optimization scheduling.Keywords : multi-time scale; database; energy management; V2B; simulation platform收稿日期: 2021-06-28;收到修改稿日期: 2021-08-10基金项目: 国家自然科学基金(52077078)作者简介: 杨 凯(1995-),男,山西运城市人,硕士研究生,专业方向为智能控制。
硬件在环仿真在轮机模拟器的应用探讨与其关键技术
[ y r s H rwaei- el ps uain C ne o l gS s m ; set l eh ooy Ke d ] ad r — t — o m lt ; etr oi yt wo nh o i o C n e E sni cn lg aT
0 引 言
轮机模拟 器是在国际公约 的要 求下应运而生 , 为广大的船
e e c p l ai n o a d r - - e l o i lto n i er o smu a o . r n e o a p i t f r wa e i - - p s t c o h ・ t - n h o mu ai n i e g n o m i l t r n
景象, 毕竟 实际机 舱中只有固定 的机械设 备。所以轮机模拟器 的好坏很大 程度上依 赖于其 内部的数 学模型 是否能最 大程度
上 与 实 船 运 行 的 效 果 相 一 致 。 实 际 上 , 学 模 型 的 建 立 是 依 靠 数
机、 造水机 , 最后通过 三通 阀回到高温淡水冷却器。
水 通 过 三 通 阀 , 经 滑 油 冷 却 器 、 温 淡 水 冷 却 器 再 回 到 中 央 流 高 冷 却 器 。高 温 淡 水 在 高 温 淡 水 冷 却 器 被 低 温 淡 水 冷 却 , 经 主 流
种媒 介显示在人机 交互的界 面上 [】 1。轮机 模拟器不 同于其他
训 练 模 拟 器 的 地 方 在 于 , 的 工 作 环 境 不 需 要 借 助 太 多 的 外 部 它
软件 2 1 0 2年第 3 3卷 第 7 期
S T R 0F WA E
国际 I T传媒品牌
硬件在环仿真在轮机模拟器的应 用探讨 与其关键技术
汽车ESP硬件在环仿真试验台搭建毕业论文

汽车ESP硬件在环仿真试验台搭建毕业论文目录第1章绪论11.1选题意义与背景11.1.1汽车电子产品的开发方法与硬件在环仿真11.1.2车身电子控制与汽车主动安全的发展与研究21.1.3本文研究的主要容21.2硬件在环仿真基础理论21.2.1硬件在环仿真的概念31.2.2硬件在环仿真的开发背景与优点31.2.3硬件在环仿真的形式与组成部分31.3汽车防抱死制动系统(ABS)61.3.1 ABS的基本工作原理61.3.2 ABS硬件在环仿真的实现81.4汽车电子稳定性程序(ESP)81.4.1 ESP的基本工作原理81.4.2 ESP硬件在环仿真的实现方法101.5本文研究容14第2章试验台的硬件建设142.1 试验台硬件系统总体方案142.1.1 ABS/ ESP的比较142.2.2 ESP的硬件在环仿真实验台方案142.2 Dspace实时仿真系统152.3 液压控制单元172.4 制动系统与操纵系统182.5 传感器182.6 信号采集电路192.6.1 限幅电路202.6.2 滤波电路202.6.3 隔离电路212.6.4 信号采集电路212.7 实验台架222.8 其他硬件23第3章试验台的软件建设233.1 车身二自由度操纵稳定性数学模型243.2 车辆两轮三自由度直线行驶数学模型283.2.1 车身模型293.2.2 轮胎模型313.2.3 动力传动系模型323.2.4 车辆两轮三自由度数学模型353.3 车辆四轮七自由度数学模型353.3.1 车身模型363.3.2 轮胎模型443.3.3 动力传动系模型463.3.4 制动器模型483.3.5 车辆四轮七自由度数学模型49第4章仿真结果分析504.1 基于Matlab/Simulink的离线仿真504.1.1 模型参数设定504.1.2 油门控制车辆直线加减速工况仿真514.1.3 制动轮缸压力控制车辆直线加减速工况仿真55 4.1.4 转向角控制车辆稳态转向工况仿真564.2 基于Dspace的实时仿真614.2.1 Matlab/Simulink与Dspace的无缝连接614.2.2 无I/O接口的实时仿真624.2.3 有I/O接口的实时仿真654.2.4 仿真结果分析68第5章全文总结与工作展望68致谢69参考文献69附录71第1章绪论1.1选题意义与背景1.1.1汽车电子产品的开发方法与硬件在环仿真近年来,人们对提高汽车的动力性和经济性以与降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
智能车硬件在环仿真系统的设计与实现

3、故障诊断与恢复
HiL系统在运行过程中可能会遇到各种故障和异常情况,为了保证系统的稳定 性和可靠性,需要实现故障诊断和恢复机制。在实际应用中,可以使用故障诊 断专家系统、自适应滤波等方法进行故障诊断和恢复。
结论:
智能车硬件在环仿真系统是一种有效的智能汽车研发测试方法,它可以提高车 辆的安全性、舒适性和环保性能。通过HiL系统的设计和实现,可以在车辆实 际制造之前对控制算法、决策策略、系统性能等进行全面评估和优化,降低车 辆研发和测试成本,缩短车辆研发周期。
谢谢观看
2、仿真环境设计
仿真环境是HiL系统的核心部分,其精度和真实性直接影响到测试结果的可信 度。因此,需要建立高精度的车辆模型、传感器模型和道路环境模型。在实际 应用中,可以使用现有的仿真软件平台进行二次开发,如MATLAB/Simulink、 Prescan等,以满足特定需求。
3、实时操作系统设计
未来随着智能汽车技术的不断发展,HiL系统也将不断改进和完善,为智能汽 车的研发和应用提供更强大的支持。
参考内容
随着可再生能源在全球能源结构中的地位日益提升,风能作为一种重要的可再 生能源,得到了广泛的应用和发展。风电变流器作为风力发电系统中不可或缺 的部分,其性能和稳定性对整个风电系统的运行有着重要影响。本次演示主要 探讨了风电变流器的RTLAB硬件在环仿真系统设计与实现方法。
智能车硬件在环仿真系统的设 计与实现
目录
01 一、智能车硬件在环 仿真的概念
03
三、智能车硬件在环 仿真系统的实现
02
二、智能车硬件在环 仿真系统的设计
04 参考内容
随着科技的快速发展,智能汽车已经成为现代交通领域的重要组成部分。为了 在激烈的市场竞争中保持领先地位,许多汽车制造商和研发机构都在积极探索 和研究新的技术,以提高汽车的安全性、舒适性和环保性能。其中,智能车硬 件在环仿真系统(Hardware-in-the-Loop Simulation,简称HiL)作为一种 有效的仿真测试方法,被广泛应用于智能汽车的研发过程中。
基于Simulink的V2X硬件在环测试系统研究
10.16638/ki.1671-7988.2020.12.028基于Simulink的V2X硬件在环测试系统研究蔡之骏,张莹,杨波,冯其高,李晓平(广州汽车集团汽车工程研究院智能网联中心电控开发部,广州广东511434)摘要:V2X(Vehicle-to-Everything)技术的国际标准和国内标准已相继出台,相关的测试需求也越来越迫切。
文章提出一种基于Simulink的V2X硬件在环仿真测试系统方案,该方案中V2X设备通过CAN信号与仿真模型和车机显示屏交互,从而模拟真实的V2X设备实车前装工作环境;同时,本方案中的测试系统还使用GNSS模拟器发送实时定位数据以模拟真实GPS信号衰减。
该方案能快速完成大量V2X算法场景测试及验证,有效缩短测试和开发周期,并能通过简单地加入驾驶模拟器即可支持V2X驾驶员在环(DIL)仿真测试。
关键词:V2X;硬件在环仿真;驾驶员在环仿真;Simulink中图分类号:U495 文献标识码:A 文章编号:1671-7988(2020)12-87-04Research on V2X Hardware-in-the-Loop Test System Based on SimulinkCai Zhijun, Zhang Ying, Yang Bo, Feng Qigao, Li Xiaoping(Guangzhou Automobile Group Co., Ltd Automotive R&D Center, Guangdong Guangzhou 511434)Abstract: As the national and international standards for V2X (Vehicle-to-Everything) technology been published in recent years, there are increasing needs to find ways to test V2X products effectively. This paper suggests a method to build V2X HIL (Hardware-in-the-Loop) test system based on Simulink models. In the system, the V2X equipment communicates with vehicle models and vehicle HMI screen to simulate the real environment for factory-installed V2X products; meanwhile, the system also employs GNSS simulator to send real-time position signals so that the GPS signal attenuation can be simulated. The system can complete lots of V2X algorithm scenario tests and verifications rapidly, reducing the test and develop periods significantly. Moreover, the system is able to do V2X DIL (Driver-in-the-Loop) tests by simply including the driving simulator.Keywords: V2X; HIL; DIL; SimulinkCLC NO.: U495 Document Code: A Article ID: 1671-7988(2020)12-87-04前言V2X[1](Vehicle-to-Everything)技术通过将“车-人-路-云”等交通要素有机地结合起来,能有效构建智慧交通体系,并使车辆获取比单车感知更多的信息。
基于硬件在环的自动驾驶智能汽车电磁兼容性测试平台[发明专利]
![基于硬件在环的自动驾驶智能汽车电磁兼容性测试平台[发明专利]](https://img.taocdn.com/s3/m/0cbee78d27d3240c8547efb6.png)
专利名称:基于硬件在环的自动驾驶智能汽车电磁兼容性测试平台
专利类型:发明专利
发明人:孙海伟,吕刚,陈文良,张纯健,尤仁杰,周加康,杜鑫,由甲,杨威娜,王择林
申请号:CN201911324234.0
申请日:20191218
公开号:CN110988555A
公开日:
20200410
专利内容由知识产权出版社提供
摘要:本发明公开一种基于硬件在环的自动驾驶智能汽车电磁兼容性测试平台,设置一电波暗室,在电波暗室中设置有移动假人系统、雷达目标模拟器系统、场景模拟系统;移动假人系统和雷达目标模拟器系统用于车载雷达的电磁兼容测试;场景模拟系统用于车载前视摄像头的电磁兼容测试。
本发明实现了硬件在环智能汽车感知系统的电磁兼容无干扰模拟测试,填补了无电磁干扰电磁兼容测试的研究空白,建立了智能汽车整车级电磁兼容测试评价体系。
申请人:长春汽车检测中心有限责任公司,宝马(中国)服务有限公司
地址:130011 吉林省长春市创业大街1063号
国籍:CN
代理机构:北京格允知识产权代理有限公司
代理人:张沫
更多信息请下载全文后查看。
智能网联汽车硬件在环虚拟仿真实验平台设计开发

智能网联汽车硬件在环虚拟仿真实验平台设计开发随着智能网联汽车技术的不断发展,越来越多的汽车制造商和科研机构开始将注意力集中在智能网联汽车硬件的设计和开发上。
为了有效地测试和验证这些硬件设备的性能和可靠性,设计和开发一个基于虚拟仿真的实验平台变得尤为重要。
本文将讨论智能网联汽车硬件在环虚拟仿真实验平台的设计和开发。
首先,为了设计和开发一个有效的智能网联汽车硬件在环虚拟仿真实验平台,需要确定仿真系统的整体框架和组成部分。
这些组成部分包括车辆仿真模型、传感器模型、通信模块和控制器模型等。
通过合理的组合和配置这些模型,可以在虚拟环境中完整地模拟智能网联汽车的硬件系统。
其次,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要依靠先进的仿真软件和工具。
目前市场上有很多成熟的汽车仿真软件,如CarSim、ADAMS和Vissim等,这些软件具有强大的仿真和建模能力,能够实现真实的汽车行驶环境和各种场景的模拟。
通过使用这些软件,可以方便地进行智能网联汽车硬件在环虚拟仿真实验的设计和开发。
同时,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到与实际硬件设备的接口和通信。
在虚拟仿真环境中,需要设计和开发模拟传感器和控制器的模型,以模拟真实硬件设备的输入和输出,并与仿真系统进行通信。
这样可以在仿真环境中测试和验证智能网联汽车硬件设备的性能和可靠性。
此外,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到不同场景下的测试和验证需求。
智能网联汽车在不同的道路条件、环境和交通状况下都需要具备良好的性能和可靠性。
因此,在虚拟仿真实验平台中,需要设计和开发不同场景的仿真模型,以模拟各种不同的道路条件、环境和交通状况,并对智能网联汽车硬件设备进行测试和验证。
最后,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要进行充分的测试和验证。
在开发过程中,需要对虚拟仿真实验平台的各个组成部分进行测试和验证,以确保其能够准确地模拟智能网联汽车的硬件系统。
电子换挡控制器硬件在环测试系统设计

换挡器GSM、电子换挡控制器ACM、换挡执行器ARC、变速 器控制器TCU及EMS、ESC等其他控制器,这些控制器共同 组成整个电子换挡系统。
其中,GSM负责感知驾驶员换挡操作,并将操作信息转 化为CAN信息;EMS、ESC等控制器将车辆状态信息,如制 动踏板状态、油门踏板状态、发动机运行状态、钥匙挡位信
系统在提升车辆科技感、豪华感的同时,还可以提升整车 NVH水平,因此该系统在国产中端车型上已被广泛应用。
换挡系统的正常运行是车辆安全行驶的重要保证,电子 换挡控制器(ACM)作为电子换挡系统的核心部件,其可靠 性对车辆安全性至关重要,因此在系统研发期间对其功能的 测试非常必要。硬件在环(HIL)测试是汽车行业目前广泛 采用的一项模拟测试技术,其在极限测试、失效测试及缩短 开发周期方面尤其具备独特的优势[2]。本文基于对ACM功能 策略及其故障诊断策略的分析,基于dSPACE硬件平台搭建 硬件在环测试系统,验证ACM的可靠性。
3 测试设备〔
「技朮交強
Technical Communication
电子换挡控制器硬件在环测试系统设计
曹慧颖,崔书浩,王玮
(安徽江淮汽车集团股份有限公司技术中心,安徽 合肥 230601)
摘要:本文以一种电子换挡控制器(ACM)为测试对象,对其功能策略及故障诊断方案进行分析,并基于
dSPACE设备设计一套硬件在环测试方案,包括模型搭建、仿真界面设计、测试用例及自动化脚本开发,对该控制 器的功能及诊断进行半实物仿真测试,并生成可视化报告遥试验结果表明,该测试方案能够准确全面检测ACM的 各项功能,提高该产品的可靠性遥
关键词:电子换挡控制器;硬件在环;dSPACE 中图分类号: U463.6 文献标志码: A 文章编号: 1003-8639( 2021 )06-0068-04
智能网联汽车硬件在环虚拟仿真实验平台设计开发
实 验 技 术 与 管 理 第38卷 第7期 2021年7月Experimental Technology and Management Vol.38 No.7 Jul. 2021收稿日期: 2020-12-16基金项目: 国家重点研发计划项目(2018YFB1600600)作者简介: 史延雷(1988—),男,河北邢台,博士,主要研究方向为智能网联汽车测试方法,shiyanlei@ 。
引文格式: 史延雷,孟庆浩,龚进峰,等. 智能网联汽车硬件在环虚拟仿真实验平台设计开发[J]. 实验技术与管理, 2021, 38(7): 125-128. Cite this article: SHI Y L, MENG Q H, GONG J F, et al. Design and development of hardware-in-loop virtual simulation experimental platform for intelligent networked vehicle[J]. Experimental Technology and Management, 2021, 38(7): 125-128. (in Chinese)ISSN 1002-4956 CN11-2034/TDOI: 10.16791/ki.sjg.2021.07.023智能网联汽车硬件在环虚拟仿真实验平台设计开发史延雷1,2,孟庆浩2,龚进峰1,蔡永祥1(1. 中国汽车技术研究中心有限公司,天津 300300; 2. 天津大学 电气自动化与信息工程学院,天津 300072)摘 要:针对目前高校智能网联汽车方向教学实验设备落后,与汽车产业前沿技术发展不同步的问题,以培养汽车智能驾驶与车联网核心技术人才为目标,紧密结合汽车产业智能驾驶、C-V2X 车联网技术发展新方向,基于硬件在环和计算机数值模拟仿真技术构建了智能网联汽车硬件在环虚拟仿真实验平台。
硬件在环仿真的汽车制动控制器测试系统

硬件在环仿真的汽车制动控制器测试系统摘要:伴随着我国经济发展,我国汽车产业也在不断的创新与发展,与此相关的车辆电子控制系统技术也在迅速的成长和发展。
为此,我们也在寻找一个相对准确,快速便捷的测试系统。
硬件在环仿真(HILS)的技术也就此而生,对我国汽车制动控制系统的测试起到了极大的帮助。
关键词:汽车产业;硬件在环仿真;制动控制;测试系统1 引言随着电子信息技术的日渐发展,我们已经不满足与传统的实车道路测试,转而寻找一种新型的,准确的实验方法,希望能够取代传统的测试方法。
而硬件在环仿真(HILS)技术的诞生,恰恰满足了我们对新型测试技术的需求。
不同于传统实车道路测试,硬件在环仿真(HILS)技术运用仿真技术模拟实际的工作环境,它可以不受时间限制和环境限制,按照特定的指令,进行有目的的可控可循环的测试。
2 硬件在环仿真技术的作用原有系统中的测试精确度,和对影响测试环境的部件,黑匣子部件的测试准确度都远远不及硬件在环仿真(HILS)技术。
硬件在环仿真(HILS)技术运用采用物理元件的代替原有测试系统部件,仿真测试可以大大提高测试的准确度。
车辆制动控制系统隶属于车辆底盘的电子系统,就目前而言,大众常常较为熟悉的是制动防抱死系统(ABS),电子制动力分配(EBD)以及电子稳定控制系统(ESC)等。
硬件在环仿真(HILS)技术已经成为产品生产重要的辅助技术,如在包含两个季节的实际车辆测试,受着气候影响和多种道路等多重影响下的制动防抱死系统(ABS)中;在难度大,时间长的牵引控制能力,影响车辆速度等方面的电子稳定控制系统(ESC)中等。
除此之外硬件在环仿真(HILS)技术还有辅助上坡起步作用,紧急制动作用等延展性的辅助作用,硬件在环仿真(HILS)技术只会越来越丰富多彩,以生产方满足对产品生产的技术需求,使硬件在环仿真(HILS)技术成为重要的生产基础和不断的发展。
3 汽车制动系统的硬件在环仿真(HILS)的测试系统简介制动控制在环仿真(HILS)测试系统主要包括了故障模拟与诊断、快速性能评估和控制策略开发,这几个方面主要由以下四个方面组成:(1)上机位(2)制动控制器(3)DSPACE仿真器(4)测试台架辅助设备制动控制在环仿真(HILS)系统如图一所示:图一制动控制在环仿真(HILS)测试系统原理图3.1 上机位车辆模型的构造会大量运用到上机位,比如以下几点:(1)输出输入的控制(2)动态地显示(3)数据的采集(4)仿真测试的结果(5)数据的储存(6)后台的处理分析MSC公司专门设计了CARSIM软件,是多种车辆的仿真处理工具,CARSIM软件可以和MATLAB/SIMULINK等软件进行连接,通过RT FOR DSPACE扩展模块,建立车辆动态仿真运动,可以使车辆的物理元件与控制台进行数据的传输与互动。
整车硬件在环(HIL)测试系统软硬件介绍
代码自动生成,与Matlab的无缝连接 直接访问实时系统 图形化显示,实时在线设计和调整
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
• RTI/RTW的使用
Simulink框图
RTI: 硬件接口程序
RTW: 代码自动生成
dSPACE控制板
选择对应的 编译方法
生成*.sdf文件
Block reduction 设置为“Off”
• 一些注意点
• Simulink中的“Fcn”模块不能使用 • 其它工具箱中的模块多不能使用(DSP工具
箱中的“Filtering”模块可用) • 仿真参数设置窗口中的“Block reduction”一
定设置为“Off” • 编译出现RTI错误,可尝试新建*.mdl文件 • AutoBox开启状态下,编译完成后会自动下载
菜单栏
工具栏设置菜单 (右键点击工具栏)
工具栏
浏览器
视窗
虚拟仪器
工具窗口 状态栏
• 常用工具
• 日志观察器(Log viewer)
– 观察ControlDesk的行为 – 错误信息
工具窗口
•常用工具
• 平台浏览器(Platform manager)
– 设置与硬件的连接,创建/清除平台注册文件 – 浏览平台,控制实验过程 – 下载*.sdf文件
代码;否则仅生成*.sdf文件
• RTI的高级应用 • 中断处理(软件和硬件中断) • 定时器的调用 • 多任务的处理 • 非周期系统的处理(触发和使能系统)
• 内容概述
• 基于dSPACE的系统开发模式 • RTI/RTW的使用 • Control Desk的使用 • 实例
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第34卷第2期2019年5月Vol.34No.2May2019青岛大学学报(工程技术版)JOURNAL OF QINGDAO UNIVERSITY(E&T)文章编号:1006-9798(2019)02-0085-05;DOI:10.13306/j.1006-9798.2019.02.015硬件在环汽车驾驶模拟器系统开发孙荣强,陈焕明,刘大维(青岛大学机电工程学院,山东青岛266071)摘要:为提高硬件在环仿真过程中实时监控的精度,本文基于xPC Target实时仿真实验平台,开发了硬件在环汽车驾驶模拟器系统$采用Matlab/Simulink软件,对车辆参数和道路环境等进行配置,搭建仿真模型,同时结合转向盘转角传感器、制动/油门踏板传感器和数据采集卡等硬件设备,实现外部硬件对虚拟车辆运动的控制,完成相关硬件在环仿真实验$以某型轿车为例,在平坦标准道路上的转向性能进行模拟,对驾驶模拟器系统的性能进行测试$实验结果表明,该系统的实时性和精度满足汽车动力学仿真实验的要求,为研究和开发驾驶辅助系统提供了实验平台,具有广阔的应用前景$关键词:驾驶模拟器;xPC Target;硬件在环;veDYNA中图分类号:U467;TP27文献标识码:A随着汽车工业的迅猛发展,汽车从设计到进入市场,周期越来越短,而设计研发需要耗费大量的精力物力,特别是实车实验,不仅危险而且十分复杂$硬件在环仿真作为一种实时仿真技术已经被广泛应用于汽车研发过程,硬件在环仿真是将外部实物通过计算机接口嵌入到软件环境中,代替一些难以用数学模型描述的问题,提高仿真精度13'$基于驾驶模拟器的硬件在环试验台,利用计算机仿真及电子、控制等相关技术,许多研究者从人一车—路“闭环系统”整体性能出发对驾驶员行为和道路环境等进行仿真研究$ B. A.Giivene等人5利用dSPACE、xPC Target-Box,Vehicle Simulator和工控机等开发了一套车辆硬件在环控制系统,并利用其对车辆偏航稳定性控制器进行控制效果的评估;王野等人6基于dSPACE实时仿真系统,利用Controldesk和Matlab 开发实验台监控程序,通过典型工况对硬件在环实验台进行功能验证;李幼德等人7基于dSPACE实时仿真平台,以CarSim/Simulink联合仿真,搭建驾驶模拟器系统,实现各种模拟实验条件,对驾驶员制动意图模型进行训练和开发;李升波等人8搭建了基于xPC的驾驶员辅助系统硬件在环仿真实验台,以模块化思路建立仿真模型,采用S函数驱动主界面方法,解决了硬件在环仿真过程进行实时监控的问题$基于此,本文选用xPC Target作为实时平台,由veDYNA软件提供车辆各部分动力学模型,设计开发了汽车驾驶模拟器硬件在环仿真系统。
该研究为车道偏离辅助系统等开发提供了仿真平台$1硬件在环汽车驾驶模拟器系统组成及工作原理硬件在环汽车驾驶模拟器系统原理图如图1所示$系统主要由上位机、显示器、下位机、操纵机构、仿真模型和数据采集模块组成$利用veDYNA、Matlab/Simulink软件,硬件在环汽车驾驶模拟器的上位机对车辆参数和道路环境等进行配置,搭建仿真模型,采用Simulink中RTW工具箱进行编译,通过TCP/IP通信协议传输到xPC实时系统的下位机。
仿真模型在下位机中实时运行,仿真结果以动画、曲线等形式实时回传到上位机&'$驾驶员根据仿真结果,通过转向盘、制动/油门踏板等操纵机构对虚拟车辆进行实时控制。
数据采集模块中,转向盘转角传感器等将驾驶员的操纵转变为电信号,通过PCI6070E数据采集卡的A/D通道传输到下位机中,对仿真模型进行实时运算,从而实现外部硬件对虚拟车辆运动的控制,完成相关的硬件在环仿真实验。
硬件在环汽车驾驶模拟器系统实物如图2所示。
收稿日期:2018-12-02;修回日期:2019-02-15基金项目:山东省高等学校科技计划项目(J18KA048)作者简介:孙荣强(1993-),男,硕士研究生,主要研究方向为汽车动态仿真与控制技术.通讯作者:陈焕明(1978-),男,博士,讲师,主要研究方向为汽车动态仿真与控制技术$Email:qdchm@86青岛大学学报(工程技术版)第34卷图1硬件在环汽车驾驶模拟器系统原理图2硬件在环汽车驾驶模拟器硬件系统2. 1上位机及下位机系统上位机及下位机系统由两台PC 机通过xPC Target 硬件在环仿真工具配置而成,通过TCP/IP 通信协议进行数据传输$上位机采用惠普Compaq dc7800型计算机,CPU 主 频为2. 7 GHz 的Intel Pentium(R)处理器,内存4 GB ;下位机采用惠普Compaq dc7700型计算机,CPU 主频为2.13GHz 的 Intel Rore(TM )'处理器,内存 4 GB $2.2数据采集模块数据采集模块由数据采集卡、转向盘转角传感器、油门/制动踏板传感器和转矩传感器组成$数据采集卡采用美国制动 踏板转向盘上位机 显示器下位机油门踏板上位机图2硬件在环汽车驾驶模拟器系统实物NI 公司生产的PCI- 6070E 型号,该采集卡功能丰富、采集速度快、准确率高,并支持DMA 和双缓冲两种传输方 式,保证了实时信号的不间断采集和存储$数据采集卡提供了 16路单端/8路差动输入通道、2路独立的D/A 输出通道、8线的数字I/O 、个24位的定时器/计数器等多种功能,高效可靠地完成数据采集,将下位机与转向盘、 制动/油门踏板等外部设备连接,通过A/D 通道将采集到的转向盘转角信号、油门/制动踏板信号和转向盘转矩 信号转换成数字信号传输到计算机中进行仿真运算[10]$转向盘转角传感器采用ZKT6012光电式旋转编码器,与转向盘同轴连接,输出转向盘转角信号,准确地将驾驶员对转向盘的输入转换为计算机可识别的电信号。
该编码器体积小、重量轻、安装方便,分辨力为14.4,具有较高的测量精度z $光电式旋转编码器输出Out A 和Out B 两路正交信号和一路零位信号,实现双向计数,适合进行转向盘转角的测量$当转向盘顺时针旋转时,Out A 通道信号超前Out B 信号1/4T 相位,逆时针旋转时则相反。
顺时针和逆时针转动光电编码器输出信号如图3所示。
将光电编码器输出的两路信号输入到鉴向电路中,鉴 图3顺时针和逆时针转动光电编码器输出信号向电路根据输入信号的相位差判断转向盘的旋转方向$鉴向电路由D 触发器CD4013B 和与非门DM74LS132 组成,鉴向电路原理图如图4所示$当转向盘顺时针转动时,X 端口输出脉冲信号,匕 端口没有脉冲信号输 出[12];当转向盘逆时针转动时,匕端口输出脉冲信号,X端口没有脉冲信号输出$油门和制动踏板采用三佑公司JKH- 503型电子脚踏板,踏板转动角度最大为30。
,准确反映驾驶员对车辆 的纵向动力学控制$踏板内部基于霍尔式传感器,结合控制电路,只需提供+ 5 V 电平便可输出与踩踏角度成正 比关系的0〜+ 5 V 连续变化的模拟信号,信号可直接通过数据采集卡的A/D 端口输入计算机进行处理[13]$转向盘转矩传感器采用余航YH502系列扭矩传感器,该传感器采用应变片电测技术,在弾性轴上组成应变 桥,在应变桥两端施加电压即可测得该弾性轴所受扭矩的电信号。
信号放大后,经过压/频转换,得到与扭应变成第2 期孙荣强,等:硬件在环汽车驾驶模拟器系统开发87正比的频率信号,信号可直接通过数据采集卡的A/D 端口输入计算机进行处理,计算出驾驶员对转向盘的输入 转矩[14] $图4鉴向电路原理图outB 2out434U\Q VDD D幺CLOCKSET VSS RESET 8vcc7逆时针转动信号6outB 5out43硬件在环汽车驾驶模拟器软件系统3.1车辆动力学模型在Simulink 环境下,车辆动力学模型如图5所示。
该模型基于车辆动力学软件veDYNA 中Standard 结构 的车辆动力学模型,采用模块化建模方式,集成了转向/制动系统模块、发动机系统模块及轮胎模块等[15],根据仿 真改变各个参数,以适配仿真环境$本文所开发的硬件在环汽车驾驶模拟器,嵌入了转向盘转角Simulink 模型 和油门/制动踏板Simulink 模型等,实现了驾驶员通过操纵机构对车辆的控制$图5车辆动力学模型3. 2道路模型在Simulink 环境下,道路模型如图6所示$在veDYNA的车辆动力学主界面中,提供了标准模型和双向车道/高级模型两种道路模型的选择$标准道路模型可以提供最多15段车道, 可分别设置不同道路的表面摩擦系数及坡度;双向车道/高级模Syncin <veDYNARoad>Syncin SyncOut System Instance [1]veDYNARoad Subsystem 图6道路模型SyncOut型可以设置包括道路指示牌及前后车交通环境等在内的3D 道路环境,提供了更加丰富的仿真实验环境[16] $3.3数据采集模型在Simulink 环境中,搭建数据采集模型,数据采集模型如图7所示。
该模型的作用是采集转向盘转角信号、 油门/制动踏板信号和转向盘转矩信号$转向盘转角传感器、油门/制动踏板传感器和转向盘转矩传感器生成的 电信号,通过PCI- 6070E AD 模块转换为数字信号,由数据处理模块处理后,得到转向盘转动角度、油门/制动踏 板踩踏角度和转向盘转矩,传输到车辆动力学模型,实现外部操纵机构对虚拟车辆的转向及加/减速等控制[17] $4硬件在环汽车驾驶模拟器系统测试为测试该系统的性能,以某型轿车为例,在平坦标准道路上行驶时的转向性能进行模拟$首先在上位机中的88青岛大学学报(工程技术版)第34卷车辆动力学软件veDYNA 中设置车辆参数和道路环境等,搭建仿真模型,车辆以30 km/h 和60 km/h 的车速行 驶时,驾驶员通过转向盘实时输入阶跃转向信号,在下位机中实时计算车辆的横摆角速度和侧向加速度响应,并 将结果传输到上位机进行记录分析[18] $车辆横摆角速度和侧向加速度响应曲线如图8和图9所示。
PCI-6070E 2National Instr. 3Analog Input °Ini In2In3In4In5Outl Data Out2Processing Out3Out4Steering Wheel Angle PCI-6070EAD Subsystem Steering Wheel TorqueAce Pedal 图7数据采集模型时间〃sa 车速卩=30 km/h图8横摆角速度响应时间〃s b 车速卩=60 km/h 时间f/sb 车速卩=60 km/h图9侧向加速度响应由图8和图9可以看出,车辆侧向加速度和横摆角速度随转向盘的转动而变化,且变化趋势一致$由图8可 以看出,当转向盘从+开始转动,经+1和+秒达到转向盘转角最大值的50%,横摆角速度达到最大值的50%,横 摆角速度响应时间+”(+ = +2—+1)均小于0. 5 s ;由图9可以看出,当转向盘从+0开始转动后,经+秒侧向加速度 开始变化,侧向加速度响应时间+-(- =+3—+0)同样均在0. 5 s 以内$根据瞬态响应实验中车辆侧向加速度响应 时间和横摆角速度响应时间标准[19],该系统能够满足汽车动力学仿真实验的实时性要求&0'$5结束语本文基于xPC Target 实时仿真实验平台,结合车辆动力学仿真软件veDYNA ,开发了硬件在环汽车驾驶模 拟器系统$采用Matlab/Simulink 软件,对车辆参数和道路环境等进行配置,搭建仿真模型,通过数据采集卡采 集转向盘转角传感器、油门/制动踏板传感器和转矩传感器等信号,实现外部硬件对虚拟车辆运动的控制$经过 实验测试表明,该系统运行稳定,实时性好,满足汽车动力学仿真实验的要求,可作为驾驶辅助系统的仿真平台$参考文献:[1] Maroteaux F ,Saad C. Diesel engine combustion modeling for hardware in the loop applications : Effects of ignition delaytime第2期孙荣强,等:硬件在环汽车驾驶模拟器系统开发89model[J].Energy,2013,57(8):641-652.[2]邓涛,孙冬野,秦大同,等.基于Simulink与veDYNA联合仿真平台的AMT硬件在环试验研究[J].汽车工程,2011,33(5):411-416,421.[3]吴志敏.硬件在环技术在汽车上的应用研究[J].科技视界,2013(19):90-91.[4]丁立,熊坚,陈泽林,等.面向人-车-环境系统的汽车驾驶模拟器的开发和应用[J].公路交通科技,2002,19(6):160-163,171[5]Guvenc B A,Guvenc L,Karaman S.Robust yaw stability controller design and hardware-in-the-loop testing for a road Vehicle[J].IEEE Transactions on Vehicular Technology,2009,58(2):555-571.&]王野,李刚.驾驶模拟器硬件在环制动试验台开发[J].汽车实用技术,2016(12):45-49.[7]李幼德,刘巍,李静,等.汽车稳定性控制系统硬件在环仿真[J].吉林大学学报:工学版,2007,37(4):737-740.[8]李升波,王建强,李克强.基于xPC的驾驶员辅助系统硬件在环仿真试验台[J].中国机械工程,2007,18(16):2012-20155[9]杨涤.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.[10]刘中富.虚拟仪器技术在海军靶场的应用研究[D].杭州:浙江大学,2006.[11]杨财,周艳霞.方向盘转角传感器研究进展[J].传感器与微系统,2007,26(11):1-4.[12]杨新红,高峰,王国富,等.基于TESIS DYNAware的车辆巡航虚拟试验研究[J].机械工程学报,2011,47(20):165-170[13]赵珂,袁建州,齐康,等.电子制动踏板在某款纯电动车上的应用[C]"河南省汽车工程科技学术研讨会.信阳:河南省汽车工程学会,2016:383-384.[14]李嫩.基于ADSL驾驶模拟器的横摆角速度硬件在环仿真系统[D].长沙:湖南大学,2005.[15]武志杰,郭洪艳,柳致海,等.基于xPC Target的汽车动力学HiL仿真系统设计[J].控制工程,2011,18(4):610-613.[16]王伟,吴超仲,严新平,等.汽车驾驶模拟器动力学仿真建模[J].武汉理工大学学报:信息与管理工程版,2005,27(1):135-13&[17]李胜琴,赵立.基于Simulink的某型车转向特性分析[J].小型内燃机与车辆技术,2014(4):44-4&[18]房丽爽,郭洪艳,陈虹.汽车动力学HiL仿真实验平台的搭建及应用[J].控制工程,2015,22(3):375-381.[19]中国汽车技术研究中心.GB/T6323.2—1994汽车操纵稳定性试验方法[S].北京:中国标准出版社,1994.[20]余志生.汽车理论[M].5版.北京:机械工业出版社,2009.Development of Hardware in the Loop Driving Simulator SystemSUN Rongqiang,CHEN Huanming,LIU Dawei(School of Electromechanic Engineering,Qingdao University,Qingdao266071,China)Abstract:In order to improve the accuracy of real-time monitoring in the hardware-in-the-loop simulation process,a hardware-in-the-loop driving simulator system was developed based on the xPC Target real-time simulation experiment platform in this paper.The Matlab/Simulink software was used to configure the vehicle parameters and road environment to build a simulation bined with the steering wheel angle sensor, brake/accelerator pedal sensor,data acquisition card and other hardware equipment,the virtual vehicle motion wascontro l edandthereleYanthardware-in-the-loopsimulationexperimentwascompleted.Takingacarasan example,the steering performance on a flat standard road is simulated to test the performance of the driving simula?or sys?em.The experimen?al resul?s show?ha??he real-?ime performance and accuracy of?he sys?em meet the requirements of automotive dynamics simulation experiments,and provide an experimental platform for research and development of driving assistance systems,with broad application prospects.Key words:driving simulator;xPC Target;hardware in the loop;veDYNA。